-
8/9/2019 Dizitization of analog fiters
1/5
Assignment #2: Digitisation of Analog Filters
Mohammed Alamgir
December 7, 2013
Problem
An elliptic filter with specifications
1 = 3000Hz, K 1 = 1dB,
2 = 5000Hz, k2 = 30dB
0 = 24335 rad/sec
has been designed to have the low-pass prototype transfer
function
Hprot(s) = 0.03s4 + 0.212s2 + 0.234
s4 + 0.828s3 + 1.245s2 + 0.595s+ 0.278 (1)
and after the transformation s s/24335 the final transfer
function
Hdes(s) = 8.55
1020
s4
+ 3.58
1010
s2
+ 0.2342.85 1018s4 + 5.74 1014s3 + 2.10 109s2 + 2.4 105s+
0.278
. (2)
Find the transfer function of equivalent digital filters using:
mapping of differentials, impulseinvariant transformation, bilinear
transformation, and matched-z transformation methods.
1 Mapping of Differentials
In this method two kinds of differentials: backward and forward
are mapped for variable s. Inbackward mapping s is replaced by s =
(1 1/z)/T, and in forward mapping s is replaced by(z 1)/T, where T
is a suitable sampling interval. For the given filter, we have 0 =
24335rad/sec. We must use a sampling frequency of at least twice
that to avoid aliasing. For simplicity
let us take s= 20 50000 rad/sec. This gives a Tvalue
of/25000.Using substitutions s 25000(1 1/z)/ and s 25000(z 1)/
result in the transfer
functions of the equivalent digital filter. Using Wolfram Alpha
one finds:
Hmdback(z) =3.4 104z4 1.37 103z3 + 2.47 102z2 4.6 102z1 +
0.257
1.14 102z4 7.46 102z3 + 0.288z2 0.589z1 + 0.643358 (3)
1
-
8/9/2019 Dizitization of analog fiters
2/5
0 500 1000 1500 2000 2500 3000 35000
20
40
60
Frequency (Hz)
Phase(degrees)
0 500 1000 1500 2000 2500 3000 350015
10
5
0
Frequency (Hz)
Magnitude(dB
)
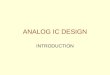
Freq and Phase response: Mapping of Diff Backward; T =/25000
Figure 1: Transfer function of digitised filter(backward
difference).
0 500 1000 1500 2000 2500 3000 350040
20
0
20
40
Frequency (Hz)
Phase(degrees)
0 500 1000 1500 2000 2500 3000 35005
0
5
10
Frequency (Hz)
Magnitude(dB
)
Freq and Phase response: Mapping of Diff Forward; T =/25000
Figure 2: Transfer function of digitised filter(forward
difference).
and
Hmdfor(z) =3.4 104z4 1.37 103z3 + 2.47 102z2 4.6 102z1 +
0.257
1.14 102z4 1.69 102z3 + 0.115z2 0.0345z1 + 0.2027 . (4)
We note that the formulae are slightly different. Plots of these
functions are shown in Fig.1 andFig.2.
It is known that this method results in unequal gains in the
pass band and distorted phase,which is evident in Fig.1. The
forward difference results in serious distortions in gains but
somewhat
linear phase response (Fig.2).
2 Impulse Invariant Transformation
The Impulse invariant method works by rearranging the transfer
function as partial fractions andthen converting each fraction to
its discrete equivalent. Using MATLABs residue() commandon eq.(1)
one gets
Hprot(s) = 0.03 +j0.06
s+ 0.07j0.8+ 0.03j0.06
s+ 0.07 +j0.8+
0.02j0.3
s 0.3j0.4
0.02 +j0.3
s 0.3 +j0.4+ 0.03 (5)
which after the substitutions of the form 1s+p 1
1z1epT in each fraction becomes
Hprot(z) = 0.03 +j0.06
1 z1e(0.07j0.8)T+
0.03j0.06
1 z1e(0.07+j0.8)T+
0.02j0.3
1 z1e(0.3+j0.4)T0.02 +j0.3
1 z1e(0.3j0.4)T+0.03
(6)
2
-
8/9/2019 Dizitization of analog fiters
3/5
0 500 1000 1500 2000 2500 3000 3500300
200
100
0
Frequency (Hz)
Phase(degrees)
0 500 1000 1500 2000 2500 3000 350020
10
0
10
Frequency (Hz)
Magnitude(dB)
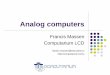
Freq and Phase response using Impulse Invariant Trans; T
=/25000
Figure 3: Transfer function of the digitisedfilter when sampled
at twice the cut-off fre-quency using Impulse Invariant method.
0 500 1000 1500 2000 2500 3000200
150
100
50
0
Frequency (Hz)
Phase(degrees)
0 500 1000 1500 2000 2500 30005
0
5
10
Frequency (Hz)
Magnitude(dB
)
Freq and Phase response using Impulse Invariant Trans; T
=/20000
Figure 4: Transfer function of the digitisedfilter when sampled
at less than twice thecut-off frequency using Impulse
Invariantmethod.
Sampling at twice the cut-off frequency ( = 1), we have T = 2/2
= . The sampled transferfunction then becomes:
Hprot(z) = 0.03 +j0.06
1 z1e(0.07j0.8)+
0.03j0.06
1 z1e(0.07+j0.8)+
0.02j0.3
1 z1e(0.3+j0.4)0.02 +j0.3
1 z1e(0.3j0.4)+0.03
(7)
Following same approach we have
Hdes(s) = 928 +j1636
s+ 18780 j21505+ 928j1636
s+ 18780 +j21505+
6264j8085
s+ 81920 j11926+
6264 +j8085
s+ 81920 +j11926+0.03.
(8)For the actual filter we takeT=/25000, and apply the
substitution of the form 1s+p
11z1epT
to get the digitized transfer function. With the aid of Matlab,
this function along with an under-sampled version are plotted in
Fig.3 and Fig.4.
3 Bilinear Transformation
For the normalised filter we have T = . So to discretise the
prototype filter we perform asubstitutions 2
z1z+1 . Using Wolfram Alpha this is found to be
Hprot(z) =0.21z4 + 0.59z3 + 0.86z2 + 0.59z+ 0.211
z4 + 0.5z3 + 1.06z2 + 0.07z+ 0.221 (9)
For the actual filter, we have T=/25000, so the transformation s
50000z1z+1 gives the discrete
transfer function, namely:
3
-
8/9/2019 Dizitization of analog fiters
4/5
0 500 1000 1500 2000 2500 3000 3500400
200
0
200
Frequency (Hz)
Phase(degrees)
0 500 1000 1500 2000 2500 3000 3500100
80
60
40
20
0
Frequency (Hz)
Magnitude(dB
)
Freq and Phase response using Bilinear Trans; T =/25000
Figure 5: Transfer function of the digitisedfilter when sampled
at twice the cut-off fre-quency using bilinear method.
0 500 1000 1500 2000 2500 3000400
200
0
200
Frequency (Hz)
Phase(degrees)
0 500 1000 1500 2000 2500 300080
60
40
20
0
Frequency (Hz)
Magnitude(dB
)
Freq and Phase response using Bilinear Trans; T =/20000
Figure 6: Transfer function of the digitisedfilter when sampled
at less than twice thecut-off frequency using bilinear method.
Hdes(z) =0.03z4 0.12z3 + 0.18z2 0.12z+ 0.03
z4 + 4z3 + 6z2 4z+ 1 (10)
With the help of Matlab, this function along with an
under-sampled version are plotted inFig.?? and Fig.6.
4 Matched-z Transform
In this method the zeros and poles of the analog transfer
function are mapped to correspondingzeros and pole in the digital
domain.
For the prototype transfer function in eq.(1) the zeros and
poles are found using MATLABstf2zp() command. The zeros are found
at j2.3 and j1.17. The poles are found at 0.07j0.89and 0.33j0.48.
The transfer function is:
Hprot(s) = 0.03(sj2.3)(s+j2.3)(sj1.17)(s+j1.17)
(s+ 0.07j0.89)(s+ 0.07 +j0.89)(s+ 0.33 +j0.48)(s+ 0.33j0.48)
(11)
Ifa denotes either a zero or a pole, then the matched-z
transform of the prototype transferfunctions is found with
substitution s +a 1 z1ea where we used T=. Using MATLABsymbolic
toolbox, one can find
Hprot(z) = 0.031.72z3 1.02z2 + 0.546z1 + 1
0.08z4 + 0.16z3 + 0.7z2 + 1.47z+ 1 (12)
4
-
8/9/2019 Dizitization of analog fiters
5/5
0 500 1000 1500 2000 2500 3000 3500100
0
100
200
Frequency (Hz)
Phase(degrees)
0 500 1000 1500 2000 2500 3000 3500100
50
0
50
Frequency (Hz)
Magnitude(dB
)
Freq and Phase response using MatchedZ Trans; T =/25000
Figure 7: Transfer function of the digitisedfilter when sampled
at twice the cut-off fre-quency using matched-z method.
0 500 1000 1500 2000 2500 3000 3500 4000 4500200
100
0
100
200
Frequency (Hz)
Phase(degrees)
0 500 1000 1500 2000 2500 3000 3500 4000 450050
0
50
Frequency (Hz)
Magnitude(dB
)
Freq and Phase response using MatchedZ Trans; T =/30000
Figure 8: Transfer function of the digitisedfilter when sampled
at higher than twice thecut-off frequency using matched-z
method.
The transfer function of the desired filter in factored form is
found as:
Hdes(s) = sj58109
s+ 18780 j21505
s+j58109
s+ 18780 +j21505
sj28470
s+ 81920 j11926
sj28470
s+ 81920 +j119260.03.
(13)Using the substitution s+a 1 z1ea/25000, (a is either a zero
or pole) in above equationgives the discrete form the transfer
function.
With the help of Matlab, this function along with an
under-sampled version are plotted inFig.7 and Fig.8.
We notice that the frequency response (Fig.7) has sudden deeps
that were not present in theanalog version. Even when the sampling
rate is increased the deeps are still present (Fig.4).
Thisreinforces the fact that Matched-Z is not suitable for all
kinds of filters.
5 Remarks
For this particular filter I conclude that the Bilinear
Transform method gives the best digitalapproximation of the analaog
transfer function.
5