-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 1
Displacement imaging during focused ultrasoundmedian nerve
modulation: A preliminary study in
human pain sensation mitigationStephen A. Lee, Student Member,
IEEE Hermes A. S. Kamimura, Member, IEEE and Elisa E. Konofagou,
Senior
Member, IEEE
Abstract—Focused Ultrasound (FUS)-based viscoelastic imag-ing
techniques using high-frame-rate (HFR) ultrasound to tracktissue
displacement can be used for mechanistic monitoring ofFUS
neuromodulation. However, a majority of techniques avoidimaging
during the active push transmit (interleaved or
post-pushacquisitions) to mitigate ultrasound interference, which
leads tomissing temporal information of ultrasound effects when
FUSis being applied. Furthermore, critical for clinical
translation,use of both axial steering and real-time (
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 2
displacements within FUS pulses [27]–[30]. However, to ac-quire
higher frame rates, event locking MRI acquisitions tothe FUS pulse
requires multiple sonications to acquire the fulltemporal
displacement profile [25]. Because neuromodulatoryeffects are
unique to a specific FUS pulse, it would be moreinformative to have
both spatial and temporal displacementprofiles for a single FUS
pulse. Frame rates in MR-ARFImay range from 0.5 [29] to 1 Hz [28]
whereas ultrasoundelastography can achieve frame rates thousands of
timeshigher. Therefore, a non-invasive ultrasound-based
techniquefor accurate real-time monitoring and targeting of the
actualFUS beam used in neuromodulation is needed.
Ultrasound imaging techniques for tissue elasticity mea-surement
have had success in various medical applications.These methods
usually depend upon accurate displacementestimation of tissue
between sequential ultrasound frames [31].Techniques such as
acoustic radiation force imaging (ARFI),shear wave imaging, and
harmonic motion imaging (HMI),utilize radiation forces to generate
local displacements withinthe tissue, palpating non-invasively
using ultrasound [32], [33].Tissue motion caused by this radiation
force can be trackedusing cross-correlation algorithms [34].
Additionally, using 2Dor 3D probes for ARFI, the localized response
in the tissuecan be tracked both spatially and temporally [35].
Feasibilityof ARFI has been demonstrated in numerous studies andin
clinical applications such as breast, abdominal muscle,heart,
liver, and colon imaging [36]–[38]. Acoustic radiationforce can
also be used to image lesions in the tissue whereconventional
ultrasound imaging has poor visualization [39],[40]. Additionally,
real-time ARFI has been applied to guidesurgical procedures and
high intensity focused ultrasound(HIFU) ablation [41], [42]. Since
we hypothesize radiationforce is involved in the mechanism of FUS
neuromodulation,we may be able to take advantage of conventional
elastographyimaging techniques to monitor and target acoustic
radiationforce generated by FUS pushes. We have previously
demon-strated this technique in mice for mechanistic studies,
relatingdisplacement to the amount of neuromodulation of the
sciaticnerve [43].
As previously mentioned, conventional acoustic radiationforce
imaging techniques do not image within the push pulse.For systems
that use a single transducer to push and image,the contribution of
all the elements are needed to remotelypalpate the tissue, thus
imaging must occur after the acousticradiation force delivery.
Systems using confocal arrangementsof two transducers experience
interference between the pushtransducer and the imaging transducer
bandwidth. Current,monitoring techniques implement filtering and/or
coded excita-tion to avoid this interference [40], [44]. However,
pulse lengthfor therapy and lesion monitoring indicated in these
studies areon orders of seconds as opposed to
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 3
71 μs
5 ms
t
Imaging
Pulse
FUS
Push
RF Data
CUDA DAS
Notch Filtering
1D Cross Correlation
Display Displacement
226.2 222.6 227.0 227.4 227.8Time [μs]
-0.4
-0.2
0
0.2
0.4
Pre
ssu
re [
MP
a]
60 80 100 120 140 160 180-0.8
-0.4
0
0.4
0.8
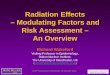
Fig. 2. Within-FUS pulse sequence as recorded using a hydrophone
infree-field. The FUS pulse is displayed in blue (acquired with a
HFO-660hydrophone), and the imaging pulse is displayed in black
(acquired with aHGL-200 hydrophone). Flow diagram of whole DAQ
sequence is shown onthe right.
The power supply enables driving multiple cycle transmits.Half
of the 256 connectors is connected to a 104 elementP12-5 Phased
Array transducer (ATL Philips, Bothell, WA,USA) for simultaneous
imaging and displacement tracking.The other 128 elements were
connected to a RF matchingbox for a 4 element, 1.1 MHz FUS
transducer (SonicConcepts,Bothell, WA, USA). A customized matching
box directs powerfrom the 64 channels in the right connector to the
4 elementannular rings (16 mm width) with area (450, 550, 650,
and70 mm2); each annular element is driven by 16 channels.The FUS
transducer has an active diameter of 64 mm witha 40 mm opening
where the imaging transducer was placedthrough (Fig. 1a). The
attached coupling cone opening is 77mm in diameter with two tubes
for degassing the water inthe transducer cone or
inflation/deflation of the membrane.The focus of the FUS transducer
(0.5 x 15 mm) was alignedusing a custom 3D printed mold so that the
plane of theimaging transducer was centered at 30 mm in depth.
TheFUS frequency and size of the focal region were chosen
tooptimize adequate radiation pressure, relative to the focal
size-to-nerve ratio. The focus encompasses the nerve
diametercompletely in the axial direction and 20% in the
lateraldirection. RF signals acquired for HFR displacement
trackingwere processed in real-time using a GPU
CUDA-accelerateddelay-and-sum (DAS) beamforming and 1D cross
correlationalgorithm [46].
Compounded plane wave images were used for initialtargeting of
the nerve. We used 5 angles (±9◦) and 1 transmit-receive operation
per angle to generate a B-mode image (Fig1b) with the focus at 30
mm. Beamformed RF data was fed
into a normalized cross-correlation algorithm [46] to
generatedisplacement maps of FUS pushes overlaid onto B-modeimages.
A a 95% overlap and a window size of 12.25 mmwas used to track
displacements in the raw RF data. Deratedpeak negative pressures
used in phantoms were under 10.9MPa peak negative pressure (MI =
10.1, 72.3 W/cm2 ISPPA)and under 7.9 MPa (MI = 7.5, 29.4 W/cm2
ISPPA) in humans.
B. Simultaneous Single-system FUS Displacement TrackingPulse
Sequence
Currently, the ultrasound DAQ system has not been config-ured
for within-pulse imaging across two transducers withoutinterleaving
sequences. Therefore, a strategy for continuousimaging and
monitoring must be developed to allow displace-ment tracking within
the FUS push. Simultaneous imagingof FUS pushes requires customized
ultrasonic parametersfor each transducer. A 1.5 cycle plane wave
emission wasprogrammed for all 128 channels connected to the P12-5.
Inorder to utilize both transducers without interleaving, the
pulseduration of the FUS transducer was set to a proportion of
thetotal time-of-flight (TOF) for a wave to travel from the
imagingtransducer face to a scatterer at the edge of the
imagingwindow and back. Therefore, to generate an image at 41
mmfrom the transducer face (aperture of 9.94 mm), the TOF (71µs)
sets the extended FUS burst to be an integer multiple ofthe TOF. To
reach a burst pulse duration of 5 ms, matchingpulse durations seen
in previous PNS neuromodulation studies,70 bursts of ultrasound
without interval between pulse trainswere transmitted during the
FUS push. The 71 µs bursts areprogrammed into the right 128
channels of the DAQ whichare used to drive all four annular
elements.
Fig. 2 shows the pulse sequence of the proposed technique.The
FUS push is shown in blue and the imaging pulse in black.The total
frame rate of the technique is also depth dependent;for a depth of
41 mm, the frame-rate is 14 kHz. Hydrophonemeasurements of the FUS
and imaging transducers in free field(HGL-200 & HFO-660, Onda
Corp, Sunnyvale, CA) is shownin Fig. 2 middle. Hydrophone
measurements reveal a 17 µsgap between subsequent FUS bursts. This
was caused by acombination of electronic processing time and
actuation timeof the elements. The processing sequence is defined
in Fig.2. After stacking and transferring all RF imaging frames,
theRF data is beamformed using a CUDA-accelerated (CUDAversion 9.1)
conventional DAS beamforming. The parallelcalculations were
performed using a GPU (Tesla k40c, Nvidia,Santa Clara, CA, USA)
with 1024 threads and 3 dimensionalindexing. Beamformed RF data was
filtered using a combnotch filter at all the fundamental (1.1 MHz)
and harmonicfrequencies (2.2 - 12.1 MHz) of the FUS transducer
foundwithin the P12-5 bandwidth. Harmonic Frequencies within the60%
bandwidth of the P12-5 were not applied in order tomaximize
signal-to-noise (SNR) of the echoes. Second orderButterworth notch
bandwidths were set to 50% of the notchfrequencies and filter
coefficients were calculated before theimaging sequence so that
in-sequence calculations would bedevoted to beamforming and cross
correlation. Displacementcalculations were performed by 1D
cross-correlation with a
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 4
95% overlap and a window size of 12.25 mm [43]. Displace-ment
maps were smoothed using a 2D median filter of 0.2%of the
reconstruction grid. Displacements were then overlaidonto the
filtered B-mode images after calculation of all framesand displayed
in real-time.
C. CUDA benchmarking
CUDA DAS beamforming was implemented through MAT-LAB GPU
kernels. Variables used to beamform in real-timewere stored in the
shared memory on the GPU before imagingexecution. All delays were
calculated and summed up for eachpixel in the desired linear
interpolation grid. 3D indexing wasused for each calculation in
time (frames) and spatial (depthand lateral) points on 1024 threads
divided into 3 blocks.The kernel grid size was determined as a
proportion of thereconstructed frames and spatial grid. Lastly,
beamformingoperation was performed by passing the raw RF data as
asingular vector array.
For benchmarking GPU performance, MATLAB’s GPUparallel computing
toolbox, CPU multi-core (parfor), and CPUsingle-core operations
were used as comparisons. DAS usingMATLAB’s toolbox was performed
by pre-allocating interpo-lated RF samples and pre-defining
forwards, backwards, andcompounding delay arrays on the GPU. During
imaging oper-ation, RF data was then beamformed by linearly
interpolatingthe RF data onto pre-indexed and pre-defined delays.
The samecalculations performed in C++ were separately performed ona
single CPU and using parfor loops using 12 workers ontwo CPU cores.
Two sets of analysis were performed usinga sample acquired RF data
of size 1152 (samples) x 104(elements). Computational time was
calculated by increasingthe number of samples or increasing the
interpolation gridsize and resolution. Benchmarking code can be
made providedupon request.
D. Frame decimation
The accuracy and dynamic range of displacement trackinga 1.1 MHz
ARF push is diminished. Therefore, to increasesensitivity and
accuracy for real-time, intraprocedural targetingand monitoring, we
can either increase transducer drivingpower or remove and decimate
subsequent frames so thatinterframe displacement increases without
changes to overallcumulative displacement. For every displacement
map, RF ofdimension 104 elements x 1152 samples were stacked by
thenumber of frames into a larger 2D array (104 x 80640 for a70
frames) and acquired at the highest frame-rate required toimage at
a specific depth. To emphasize larger displacementestimates, we can
down-sample a percentage of frames andfeed the resulting beamformed
RF into the displacementestimation algorithm. In our optimization,
we decimated bya factor of 0, 3, 5, 7, and 9 (i.e., removing zero,
every 3rd,5th, 7th, or 9th frame). Therefore, for a 5 ms FUS
pulse,the received 70 frames would be reduced to 23 frames
afterdecimation by 3, allowing larger displacement
measurementsbetween subsequent frames. Afterwards, SNR was
calculatedon the displacement signals for every decimation
factor.
E. Sample preparation
A polyacrylamide tissue-mimicking phantom with 4% agarpowder
(Sigma-Aldrich, St. Louis, MO) as a scattering particle[47] was
used to validate the displacement imaging. The phan-tom has an
elastic modulus of 10 kPa, which was determinedusing the
methodology described by Han et al. 2015 [48].
F. Human subject preparation
All human subjects (n=5) were recruited acquired in accor-dance
with the 2013 Declaration of Helsinki. Ethical oversightand
approval for this study was provided by the Institu-tional Review
Board of Columbia University under protocolAAAR4475. Human subjects
were seated comfortably withtheir forearm resting in a mechanical
and movable cuff.The forearm was placed as to not introduce any
physicalshifting during the experiment. Degassed ultrasound gel
wasused to couple the transducer system bladder to the
forearm.Compound B-mode imaging was used to initially place
thetherapeutic transducer focus on the median nerve.
Heat stimulation pulses were delivered to the C6 dermatomeof the
right arm (n = 1) using a custom-built thermofoil device.This
initial feasibility study was set so that the FUS wasdelivered
exactly when the heat signal was applied to the palm.FUS
sonications (on target and off target) were randomizedwithin the 14
heat pulses delivered and the subject was askedto rate the
intensity of the thermal stimulus using the Wong-Baker scale [49].
Though the scale ranges from 0 to 10, wekept thermal stimulation
ratings in the range of 3 to 6.
G. Statistical analysis
All data was acquired in accordance with the ColumbiaUniversity
Institutional Review Board regarding patient datacollection.
Statistical testing was performed in Prism 8 (Graph-pad, San Diego,
CA) using a non-parametric Mann-Whitneytest to test for differences
between ratings given concurrentlywith FUS or sham sonication.
III. RESULTS
A. Signal-to-Noise Optimization
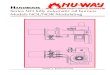
The imaging technique, using a 5 ms pulse sequence, inFig. 2 was
optimized by calculating SNR during the FUSpulse in a gelatin
tissue-mimicking phantom for decimateddisplacement estimation (0,
3, 5, 7, and 9 frames) at varyinglevels of focal pressures (Fig.
3). The displacement mapsshown are 0.16, 0.40, and 0.55 ms after
triggering the FUSpulse. Displacements illustrate the ellipsoidal
shape of theFUS beam but with increased lateral extent due to
decimation.All calculations were performed using the ROI defined
inFig. 3 (top), placed at the center of the transducer focus
(30mm). Ten pressure levels, 5 realizations each, were used
toacquire raw RF data using our technique. Post-hoc, frameswere
decimated by a factor ranging from 0 to 9 frames andthe resulting
displacement for each realization was estimatedusing normalized
cross correlation. The resulting displacementmaps (Fig. 3 top) show
larger interframe displacement valuesand illustrate the ellipsoidal
focus better as more decimation
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 5
0.7 11.0Peak Rarefactional Pressure [MPa]
-20
-10
0
10
20
30
40
SN
R [
dB
]
2.0 3.4 4.5 5.7 6.9 7.9 8.9 10.00 1 2 3 4 5 6 7 8 9
Time [ms]
-2
-1
0
1
2
3
4
5
Dis
pla
cem
en
t [μ
m]
Decimation 0Decimation 3 Decimation 5 Decimation 7 Decimation
9
FUS
-5 0 5mm
20
22
24
26
28
30
32
34
mm
-5 0 5mm
-5 0 5mm
-5
-4
-3
-2
-1
0
1
2
3
4
5
Dis
pla
cem
en
t [μ
m]
Decimation 0 Decimation 5 Decimation 9
Fig. 3. Displacement tracking for decimation by 0, 3, 5, 7, and
9 frames in a tissue mimicking phantom. Top shows interframe
displacement maps for 0,5, and 9 frame decimation. Bottom shows
representative interframe displacement traces from the same RF data
after decimation and corresponding SNRcalculations over pressures
between 0.7 to 11 MPa peak negative.
is used. The associated interframe displacement traces areshown
for a 5 ms FUS pulse in Fig. 3 bottom. Decimateddisplacements have
fewer time-points within the FUS pulsebut have larger displacement
values. Lastly, the SNR wascalculated within the pulse using the
following equation [50],[51]:
SNR =µ
σ(1)
where µ is the mean displacement and σ is the varianceacross all
realizations within the ROI. SNR was calculated fordisplacement
values only within the FUS pulse. Results showthat, for a 5 ms
pulse, decimation by 7 frames had the largestincrease in SNR by
15.09 ± 7.03 dB compared to no zerodecimation across all pressure
levels. As such, displacementSNR increases with pressure, peaking
at 5.7 MPa until thenoise from FUS harmonics severely impedes both
B-modequality and the estimated displacement. Therefore,
trade-offsbetween maximized SNR and number of frames within theFUS
pulse indicate that optimal decimation rates should rangefrom 3 to
7 frames. Thus, for the following study, all RF datawas decimated
by 5 frames before displacement estimation.
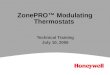
B. GPU Benchmarking
GPU parallelization of DAS beamforming using CUDAprogramming was
compared to GPU parallelization using
MATLAB’s parallel computing toolbox, CPU parallelization(12
workers) over 2 cores, and CPU calculation on one core.Fig. 4 shows
computation time over number of samples beam-formed. Averages over
3 realizations at increasing numberof RF samples show similar
computation time for both GPUmethods until 105 samples. At > 105
samples, CUDA GPUperformance shows increasing computational speedup
up to35 times the MATLAB GPU computational time. CUDA GPUmaintains
consistent speed up over CPU and parallel CPU by300 and 60 times,
respectively. Lastly, CUDA performs underreal-time criteria up to
105.6 samples.
The same computational time comparisons were performedfor
different DAS interpolated grid size resolutions (1, 0.5,0.25,
0.125) for 70 frames of 1152 RF samples of base gridsize of 60 x
512 pixels. Fig. 5 shows CUDA DAS performswell compared to all
other computational frameworks. TheMATLAB parallel toolbox and CUDA
kernel performancewas similar until (240x2048 pixels) grid sizes.
The CUDAkernel was not able to perform in real-time at grid
sizes480x4096 pixels and above. Benchmarking results also
showconsiderable speedup over CPU calculations.
C. Axial Displacement Focusing
The FUS beam was electronically focused in the axial direc-tion
by calculating delays for each of the 4 annular ultrasonicelements
so that the focal point is moved in the axial direction.
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 6
104 105 106
RF length (samples)
100-2
10-1
100
101
102
103
Co
mp
uta
tio
nal ti
me (
se
c)
CPU
Parallel CPU
MATLAB GPU
CUDA GPU
Fig. 4. Log plot of DAS computational time of CPU, parallel CPU,
MATLABGPU parallel computing toolbox, and CUDA GPU over RF
length.
60x512 120x1024 240x2048 480x4096Grid Size [px]
10-2
10-1
100
101
102
103
Co
mp
uta
tio
nal ti
me (
sec)
CPU
Parallel CPU
MATLAB Parallel GPU
CUDA GPU
Fig. 5. Computational time for CPU, parallel CPU, MATLAB
parallel GPU,and CUDA GPU operations for increasing interpolated
grid sizes for DASbeamforming. Computational time is expressed in
log scale.
Variations in the beam-shape occurs due to the changes inthe
f-number. Hydrophone measurements of the beam profilein free-field
show axial focusing capabilities up to ±10 mmrelative to the
geometric focal center. Axial focusing less than±5 mm leads to −3
dB drop off in pressure and greater than±5 mm shows greater drop
off up to −6 dB. Displacementmaps in a homogeneous phantom were
generated for eachfocal depth. Fig. 6 shows relevant focal
displacements at -5,0, 5, and 10 mm focal depths relative to the
geometric centerat the same time point. The figure illustrates maps
showingmaximum interframe displacement, corresponding to the
firstframes of FUS sonication (representative displacement trace
isshown in Fig. 3). The ellipsoidal shape of the focus can bestbe
visualized at ±5 mm. At larger axial focusing positions,
thedisplacements succumb to unfilterable FUS interference noise
from overlapping FUS and imaging beams.
D. Human median nerve targeting
In Fig. 7 we implemented the pulse sequence to
facilitatetargeting for human nerve neuromodulation in healthy
subjects(n = 5). Nerve displacements up to 1 µm, overlapping
withthe FUS focus, are shown in the second frame.
Upwardsdisplacement/relaxation begins at 32 mm in frame 3
andpropagates outwards in frame 4. Interestingly, there are
visibledifferences nerve displacement versus muscle (above 29
mm).This technique was used to first target the nerve,
ensuringmaximum FUS delivery to the nerve. Varying levels of
dis-placement for the five subjects were measured using a 5 msFUS
pulse (5.6 MPa and 7.9 MPa peak rarefactional pressure).Mean
displacement values at the center of the nerve (blackROI) from 7
FUS pulses are reported in Table I. Thoughthe focal pressure output
from the transducer was the samefrom subject to subject, the amount
of displacement variedfrom 10 to 30 microns in peak cumulative
displacement.After targeting validation, displacement images were
used tomonitor neuromodulation.
TABLE ISUMMARY OF MEASURED DISPLACEMENTS ACROSS SUBJECTS.
Subject Pressure[MPa]
Interframedisplacement[µm]
Cumulativedisplacement[µm]
1 5.6 2.1±0.3 18.3±2.42 5.6 5.5±0.3 50.1±3.43 7.9 4.2±0.3
31.3±2.34 7.9 5.2±0.5 42.3±5.55 7.9 5.1±1.6 40.7±10.7
A neuromodulation experiment was conducted to validatethe
technique in a sensory neuromodulation experiment. Fif-teen 2
second thermal pulses were delivered to the C6 der-matome of the
human palm at a random interval between 3and 4 minutes and a
subject (n = 1) was asked to rate theintensity of the pulse based
on the Wong-Baker scale [49].FUS (7.9 MPa rarefactional pressure)
and sham (no FUS andoff target FUS) stimulations were randomized
among the 15heat pulses delivered in a single trial. Displacement
imagingallowed monitoring of all FUS pulses and measurement
ofdisplacement at the nerve. Fig. 8 shows one frame of
thesupplementary video 1, indicating FUS engagement of themedian
nerve. To investigate acute effects of FUS on sensoryperception, a
pulse duration of 5 ms was chosen to ensureFUS was applied during
sensory stimulus conduction; basedon the average conduction
velocity in a healthy human subject[52] and the approximate
distance of the FUS focus to thethermal stimulus (approximately 5 -
6 cm). Both interframeand cumulative displacement were estimated
during the FUSpulse transmission at the peak of temperature
delivery. Forthis particular subject, the peak interframe and
cumulativedisplacements were estimated at the center of the nerve
(blackROI) during neuromodulation was 5.1 ± 0.7 and 40.7 ±
7.4microns, respectively. The maximum interframe displacementwas
achieved at the beginning of the pulse and the peakcumulative
displacement was acquired at the end of the FUS
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 7
-5mm0 5
0 mm
-5 0mm
5
5 mm
-5 0mm
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Dis
pla
cem
en
t [μ
m]
5
10 mm25
30
35
40
mm
-5 mm
-5mm0 5
Fig. 6. Displacement maps produced using a gelatin
tissue-mimicking phantom at -5, 0, 5, and 10 mm focal depths.
Frames shown are at the peak interframedisplacement for a 5 ms FUS
push.
-5 0 5mm
20
25
30
35
mm
-5 0 5mm
-5 0 5mm
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Dis
pla
cem
en
t [μ
m]
-5 0 5mm
t = 0.00 ms t = 0.71 ms t = 1.72 ms t = 3.57 ms
- - Median Nerve - ROI
Fig. 7. Representative tracked displacements before, during, and
after FUS push in the human subject forearms. The Median nerve is
outlined and centeredat 30 mm. The median nerve was outlined based
on B-mode images where the center of the nerve was identified and
an area of 19.6 mm2 was selectedencompassing a radius of 2.5 mm
that corresponds to the cross-sectional diameter of the median
nerve.
pulse. Sources of error in the displacement curve may be dueto
slight movement in the subjects’ arm during the
procedure.Preliminary data indicates that FUS may change
subjectivethermal perception by modulating the median nerve
duringheat stimulation. Fig. 9 shows ratings from heat stimuli
withFUS vs sham. A 0.9643 pain rating unit decrease, without
sig-nificance, was found in FUS sonications vs. sham stimulations(p
= 0.0547; two-tailed unpaired Mann-Whitney test) wherelower ratings
were indicated for lower needle-like thermalpain.
For further validation of our technique to neuromodulation,we
note differences between FUS delivery when FUS isapplied directly
to the nerve vs off-target. Fig. 10 illustrates arepresentative
displacement image when the focus was off themedian nerve (white
outline). FUS displacement still appearsat the focus of the
transducer, however the nerve was posi-tioned 5 mm away. As a
result, the displacement at the centerof the nerve (black ROI) had
a peak cumulative displacementof 3.2±1.7 microns when the focus was
off-target. Moreover,
the peak interframe displacement was 1.7±0.3 microns at theend
of the FUS pulse rather than the beginning as in Fig. 8 witha 5 µm
difference in peaks. Finally, the thermal stimulationswhich were
off-target had an average rating of 1 higher thanwhen FUS was
acting on the nerve directly (p = 0.4524; two-tailed unpaired
Mann-Whitney test).
IV. DISCUSSIONUsing a confocally aligned imaging and FUS
transducer,
we can perform real-time displacement tracking, mediatedby
CUDA-accelerated DAS, and axial focal steering using asingle
ultrasound DAQ system without interleaving. Half ofthe channels can
be used to drive the FUS-guided system withsimultaneous custom
waveforms programmed for imaging onhalf the channels and FUS on the
other. A major advantageof using this technique, is the ability to
perform RF stackingand displacement tracking in real-time.
Using the Cramer-Rao lower bound [26] for a SNR of 30dB, a
correlation coefficient of 0.98, and a window length
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 8
- - Median Nerve
-5 0 5
mm
20
22
24
26
28
30
32
34
mm
-10
-5
0
5
10
Dis
pla
cem
en
t [μ
m]
- ROI
t = 0.86 ms
0 1 2 3 4 5 6 7 8 9
-5
0
5
Inte
rfra
me D
isp
lacem
en
t [μ
m]
Time [ms]
0
20
40
60
Cu
mu
lati
ve D
isp
lacem
en
t [μ
m]
FUS
Fig. 8. Illustration of targeting and monitoring FUS
neuromodulation using simultaneous displacement imaging. Left shows
a displacement map at 0.86 msafter triggering the FUS pulse. The
median nerve is located at a depth of approximately 31 mm and was
outlined based on B-mode images using an areaof 19.6 mm2. Right
shows average and standard deviation interframe and cumulative
displacement traces over 7 FUS on-target stimulations from the
ROIshown in black.
FUS Sham
0
2
4
6
8
Th
erm
al
Ra
tin
g
p = 0.0547
Fig. 9. Thermal ratings for heat pulses with FUS and sham
treatment to themedian nerve (p = 0.0547, two-tailed unpaired
Mann-Whitney test)
of 11.25 µs our technique can ideally achieve displacementsabove
0.6711 µm where they succumb to jitter. Though,our transducer can
achieve ±10 mm axial steering of theFUS focus, there is a drop off
in tracked displacement. Thisphenomenon is especially apparent at
lower positions, wherethese low pressure pushes are below the noise
floor. However,the ±5 mm range is more than adequate for targeting
themedian nerve in the human arm and accounting for small
movements, limiting off-target effects. In the distal half ofthe
forearm, the variation in depth of the median nerve iswell within
the range of 5 mm. Furthermore, since activecompounded B-mode
imaging is continuously used betweendisplacement mapping
sonications, we can actively account forany movement during the
entire procedure.
Benchmarking clearly shows the advantages of parallelGPU
computing for conventional DAS compared to CPUcalculations.
However, the advantage of CUDA beamformingover using GPU matrices
in the MATLAB toolbox are notas easily distinguishable.
Computational speedup only occursat high data volumes and for
displacement mapping, higherresolution interpolation grids increase
SNR of displacementsand may benefit from CUDA operation. This
deviation maybe due to how CUDA-written programs efficiently use
sharedmemory whereas the MATLAB parallel computing toolboxdoes not.
Other techniques, such as Doppler functional Ultra-Sound (fUS)
would also benefit from utilizing CUDA kernelsas compounding more
than 200 frames can become compu-tationally intensive. Not included
in the above benchmarkinganalysis is the acceleration of the
initialization of the imagingsequence. Because the MATLAB toolbox
technique involvespre-indexing and delay calculation,
initialization of scriptsusing large data volumes may take minutes
to initialize.However, CUDA calculation is performed in real-time,
lead-ing to less wait time and faster in-procedure operation. Onthe
other hand, as of now, the proposed technique achieves
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 9
-5 0 5
mm
20
22
24
26
28
30
32
34
mm
Dis
pla
cem
en
t [μ
m]
t = 0.86 ms
-10
-5
0
5
10
- - Median Nerve - ROI
0 1 2 3 4 5 6 7 8 9
Time [ms]
FUS
On Target Off Target
0
2
4
6
8
Pa
inR
ati
ng
- On Target- Off Target
-5
0
5
Inte
rfra
me D
isp
lacem
en
t [u
m]
Fig. 10. Representative off-target stimulation. Left shows the
displacement map for a FUS pulse where the nerve was located 5 mm
laterally from the FUSfocus (off target). Right shows the
interframe displacement at the ROI on the nerve for on- vs
off-target stimulations and corresponding thermal ratings foreach
trace.
real-time specifications and CUDA beamforming may benefitfrom
calculating delays before initialization instead of
duringacquisition so that during imaging operation, other
computa-tionally intensive operations may take priority, speeding
upthe technique. This technique is feasible to implement inother
more conventional ultrasound systems if an external FUStransducer
is used or a custom device to allocate channels toa FUS transducer
and imaging transducer, given the sufficientframe rates (above 10
kHz) and output power (0.5 to 1MPa) can be achieved. Lower number
of imaging channelswill not impede displacement mapping, as probes
such asthe P4-2 (64 channels) can be used to track tissue
motion[48]. Lastly, the imaging frequency must be selected so asto
minimize the overlap of the FUS transducer center andharmonic
frequencies.
We demonstrate our technique’s capability to facilitate
tar-geting (n = 5) of the median nerve in and neuromodulation (n=
1) in healthy human subjects. Displacement maps show thatthe
intensity of the displacement increases as the pressure
isincreased. Due to the heterogeneity of the forearm and bound-ary
effects between muscle, connective tissue, and nerve fibers,the
displacement map does not necessarily follow the
expectedellipsoidal focus geometry. Additionally, the variance
withina single subject was consistent between FUS pulses
(maxstandard deviation of 10.7 microns). However, our
techniquereveals that same output pressures do not necessarily
translateto the same FUS modulation efficiency (nerve
displacement)
between subjects. We measured 50 µm nerve displacementfrom a 5.6
MPa, 5 ms pulse in 1 subject but 18 µm inanother from the same
pulse parameters. This can be dueto a number of factors: location
of the transducer on theforearm, the incident angle to the skin,
tissue properties, andhow well coupled the transducer system is to
the skin. Finally,we present a preliminary findings showing FUS
effects onthermal pain perception. Results show that thermal
pulseswith coincident FUS sonication had lower thermal ratingsthan
sham pulses. Moreover, pulses that were off-target to thenerve had
a higher rating than when the focus was positionedat the center of
the nerve. Displacement maps show thatdisplacement characteristics
are vastly different between on-and off-target pulses. The peak of
interframe displacementwas near the beginning of the pulse for
on-target versus theend of the pulse for off-target (Fig. 10). FUS
was capableof suppressing pain signals only when directly targeted
tothe nerve trunk. This effect could be explained by either
thegeneration of afferent signals at the nerve trunk, generatinga
masking effect of pain, changing how the subject perceivespain or,
most likely, by the direct suppression or interruptionof signals by
FUS at a more proximal portion of the nervetrunk. The masking
effect is unlikely to occur because thesonication using the
parameters used in this study withoutany other stimuli did not
generate any sensory responseitself. Future studies will explore
this hypothesis, for example,targeting receptive fields at the skin
in order to generate tactile
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 10
sensations during a concurrent pain task.Limitations of
operating at 1.1 MHz as opposed to higher
frequencies, includes lower tissue displacements as the tis-sue
absorption and acoustic radiation force decrease withfrequency.
Interleaving transmits would lower the amplitudeof displacements
further, thus simultaneous imaging withinthe pulse is essential.
The trade-off of this technique is theinterference from the FUS
transducer. Ideally, the transducerbandwidths should be separated
as far as possible to reducethe interference, but the depth
penetration limits the rangeof frequencies. Additional filtering
can minimize interference,but an inherent smoothing of the RF data
is inevitable.Nonetheless, we can adapt this single DAQ method to
otherelastography techniques such as harmonic motion imaging(HMI)
by amplitude modulating the HIFU [42]. As notedbefore, hydrophone
measurements show that we emitted apseudo-CW push due to electronic
actuation of elements. Theeffect of this timing on displacement has
yet to be determined.However, more complex coded excitations can be
developedto achieve true CW such as the ones presented by Tiran et
al.2015 [53].
In ultrasound neuromodulation literature thus far,
propertargeting is an often overlooked aspect of experimental
design,but having real-time feedback and confirmation of
targetingcan lead to more conclusive results. Crucially, we
foundthat transducer driving pressure does not necessarily lead
toreproducible therapeutic levels subject to subject, providing
anexplanation for the wide variety of US pressures reported
inneuromodulation, i.e., 1.8 MPa, 3.2 MPa, or even 50 MPato achieve
an action potential [54]. Displacement imagingreveals real-time
feedback on how much FUS is engagingthe nerve, which may vary
subject to subject or in the samesubject depending on the coupling
condition (i.e. coupling gel,incidence angle). We show that
transducer focal pressure maynot be a valid indication of FUS nerve
modulation efficacy;using displacement imaging may facilitate
comparison to otherreports of FUS neuromodulation. Furthermore, the
ability tofocus-shift adds to the ability to modify targeting
during theprocedure in remedy of poor coupling, movement artifacts,
andoff-target effects. Lastly, we have shown that variation can
bedetected and imaged with this technique which may play
animportant role in further characterizing the mechanism of
FUSneuromodulation.
V. CONCLUSION
By deriving a new pulse sequence and hardware combina-tion to
simultaneously drive a FUS and imaging transducerwith a single
ultrasound DAQ system, we have shown inthis article that tracking
displacements within the FUS pulsefor targeting and monitoring can
be accomplished. The pulsesequence and frame-rate were
experimentally optimized usinga homogeneous tissue-mimicking
phantom and applied toin vivo human median nerve stimulation.
Furthermore, thetechnique is able to operate in real-time and
account for shiftsin targeting using axial beam steering. We found
that themicron displacements in the nerve were able to confirm
FUSdelivery. Lastly, the imaging technique presented herein was
successfully validated in an experiment demonstrating FUSeffects
on thermal perception where the subject experienceda 0.9643 pain
rating unit decrease in the needle-like painsensation. Moreover,
our technique can validate on- and off-targeting of the nerve
indicating 5-micron differences at thetransducer driving pressures
explored in this study. The imag-ing technique developed here is
not restricted to the tissuesvalidated in this article, but can be
applied to any ultrasound-accessible soft tissue found elsewhere in
the body, such asthe brain. Furthermore, current studies would
benefit from amethod that allows for real-time targeting, allowing
for greaterconfidence in the results of FUS mechanistic
studies.
ACKNOWLEDGMENTSThis work was supported by the Defense Advanced
Re-
search Projects Agency (DARPA) Biological Technologies Of-fice
(BTO) Electrical Prescriptions (ElectRx) (Grant/ContractNo. DARPA
HR0011-15-2-0054), the National Institute ofBiomedical Imaging and
Bioengineering of the National Insti-tutes of Health under Award
Number R01EB027576, Sound-Stim Inc, and Google X.
REFERENCES[1] O. Naor, S. Krupa, and S. Shoham, “Ultrasonic
neuromodulation,”
Journal of Neural Engineering, vol. 13, no. 3, p. 031003, may
2016.[2] A. Fomenko, C. Neudorfer, R. F. Dallapiazza, S. K. Kalia,
and A. M.
Lozano, “Low-intensity ultrasound neuromodulation: An overview
ofmechanisms and emerging human applications,” Brain
Stimulation,vol. 11, no. 6, pp. 1209 – 1217, 2018.
[3] C. Pasquinelli, L. G. Hanson, H. R. Siebner, H. J. Lee, and
A. Thielscher,“Safety of transcranial focused ultrasound
stimulation: A systematicreview of the state of knowledge from both
human and animal studies,”Brain Stimulation, 2019.
[4] R. L. King, J. R. Brown, W. T. Newsome, and K. B. Pauly,
“Effectiveparameters for ultrasound-induced in vivo
neurostimulation,” Ultrasoundin Medicine and Biology, vol. 39, no.
2, pp. 312–331, 2013.
[5] H. Baek, K. J. Pahk, and H. Kim, “A review of low-intensity
focused ul-trasound for neuromodulation,” Biomedical Engineering
Letters, vol. 7,no. 2, pp. 135–142, 2017.
[6] J. Kubanek, J. Shi, J. Marsh, D. Chen, C. Deng, and J. Cui,
“Ultrasoundmodulates ion channel currents,” Scientific Reports,
vol. 6, p. 24170,2016.
[7] H. A. S. Kamimura, S. Wang, H. Chen, Q. Wang, C. Aurup, C.
Acosta,A. A. O. Carneiro, and E. E. Konofagou, “Focused ultrasound
neuro-modulation of cortical and subcortical brain structures using
1.9 MHz,”Medical Physics, vol. 43, no. 10, pp. 5730–5735, sep
2016.
[8] Y. Tufail, A. Matyushov, N. Baldwin, M. L. Tauchmann, J.
Georges,A. Yoshihiro, S. I. Tillery, and W. J. Tyler, “Transcranial
PulsedUltrasound Stimulates Intact Brain Circuits,” Neuron, vol.
66, no. 5,pp. 681–694, 2010.
[9] W. Lee, H.-C. Kim, Y. Jung, Y. A. Chung, I.-U. Song, J.-H.
Lee, and S.-S. Yoo, “Transcranial focused ultrasound stimulation of
human primaryvisual cortex,” Scientific Reports, vol. 6, no. 1, p.
34026, 2016.
[10] P. P. Lele, “Effects of focused ultrasonic radiation on
peripheral nerve,with observations on local heating,” Experimental
Neurology, vol. 8,no. 1, pp. 47–83, 1963.
[11] W. J. Tyler, Y. Tufail, M. Finsterwald, M. L. Tauchmann, E.
J. Olson, andC. Majestic, “Remote excitation of neuronal circuits
using low-intensity,low-frequency ultrasound,” PLoS ONE, vol. 3,
no. 10, 2008.
[12] H. A. S. Kamimura, A. Conti, N. Toschi, and E. E.
Konofagou, “Ultra-sound neuromodulation: Mechanisms and the
potential of multimodalstimulation for neuronal function
assessment,” Frontiers in Physics,vol. 8, p. 150, 2020.
[13] C. J. Wright, J. Rothwell, and N. Saffari, “Ultrasonic
stimulation ofperipheral nervous tissue: An investigation into
mechanisms,” Journalof Physics: Conference Series, vol. 581, no. 1,
p. 012003, 2015.
[14] H. Kim, S. Taghados, and K. Fischer, “Noninvasive
transcranial stim-ulation of rat abducens nerve by focused
ultrasound,” Ultrasound inmedicine & biology, vol. 38, no. 9,
pp. 1568–1575, 2012.
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 11
[15] M. E. Downs, S. A. Lee, G. Yang, S. Kim, Q. Wang, and E.
E.Konofagou, “Non-invasive peripheral nerve stimulation via
focusedultrasound in vivo,” Physics in Medicine and Biology, vol.
63, no. 3,p. 035011, jan 2018.
[16] W. J. Elias, D. Huss, T. Voss, J. Loomba, M. Khaled, E.
Zadicario, R. C.Frysinger, S. A. Sperling, S. Wylie, S. J. Monteith
et al., “A pilot studyof focused ultrasound thalamotomy for
essential tremor,” New EnglandJournal of Medicine, vol. 369, no. 7,
pp. 640–648, 2013.
[17] W. Legon, T. F. Sato, A. Opitz, J. Mueller, A. Barbour, A.
Williams, andW. J. Tyler, “Transcranial focused ultrasound
modulates the activity ofprimary somatosensory cortex in humans,”
Nature neuroscience, vol. 17,no. 2, p. 322, 2014.
[18] W. Lee, H. Kim, Y. Jung, I.-U. Song, Y. A. Chung, and S.-S.
Yoo,“Image-guided transcranial focused ultrasound stimulates human
pri-mary somatosensory cortex,” Scientific reports, vol. 5, p.
8743, 2015.
[19] T. C. Dickey, R. Tych, M. Kliot, J. D. Loeser, K. Pederson,
and P. D.Mourad, “Intense focused ultrasound can reliably induce
sensations inhuman test subjects in a manner correlated with the
density of theirmechanoreceptors,” Ultrasound in medicine &
biology, vol. 38, no. 1,pp. 85–90, 2012.
[20] L. Gavrilov, “Use of focused ultrasound for stimulation of
nerve struc-tures,” Ultrasonics, vol. 22, no. 3, pp. 132–138,
1984.
[21] B. Yoshi and B. H. S. L. E. K. E. Lumpkin, “Focused
ultrasound excitesaction potentials in mammalian peripheral neurons
in intact tissue,”PNAS (in review), 2019.
[22] F. Wu, Z.-B. Wang, H. Zhu, W.-Z. Chen, J.-Z. Zou, J. Bai,
K.-Q. Li, C.-B. Jin, F.-L. Xie, and H.-B. Su, “Feasibility of
us-guidedhigh-intensity focused ultrasound treatment in patients
with advancedpancreatic cancer: initial experience,” Radiology,
vol. 236, no. 3, pp.1034–1040, 2005.
[23] L. H. Treat, N. McDannold, N. Vykhodtseva, Y. Zhang, K.
Tam, andK. Hynynen, “Targeted delivery of doxorubicin to the rat
brain attherapeutic levels using mri-guided focused ultrasound,”
Internationaljournal of cancer, vol. 121, no. 4, pp. 901–907,
2007.
[24] K. Hynynen, “Mri-guided focused ultrasound treatments,”
Ultrasonics,vol. 50, no. 2, pp. 221–229, 2010.
[25] J. T. de Bever, H. Odéen, L. W. Hofstetter, and D. L.
Parker, “Simul-taneous MR thermometry and acoustic radiation force
imaging usinginterleaved acquisition,” Magn. Reson. Med., vol. 79,
no. 3, pp. 1515–1524, mar 2018.
[26] W. F. Walker and G. E. Trahey, “A Fundamental Limit on
DelayEstimation Using Partially Correlated Speckle Signals,” IEEE
Trans.Ultrason. Ferroelectr. Freq. Control, vol. 42, no. 2, pp.
301–308, 1995.
[27] J. Strasser, M. T. Haindl, R. Stollberger, F. Fazekas, and
S. Ropele,“Magnetic resonance elastography of the human brain using
a multi-phase dense acquisition,” Magnetic resonance in medicine,
2019.
[28] J. Vappou, P. Bour, F. Marquet, V. Ozenne, and B. Quesson,
“MR-ARFI-based method for the quantitative measurement of tissue
elasticity:Application for monitoring HIFU therapy,” Phys. Med.
Biol., vol. 63,no. 9, p. 095018, may 2018.
[29] E. A. Kaye, J. Chen, and K. B. Pauly, “Rapid MR-ARFI method
forfocal spot localization during focused ultrasound therapy,”
Magn. Reson.Med., vol. 65, no. 3, pp. 738–743, mar 2011.
[30] N. McDannold and S. E. Maier, “Magnetic resonance acoustic
radiationforce imaging,” Med. Phys., vol. 35, no. 8, pp. 3748–3758,
2008.
[31] J.-L. Gennisson, T. Deffieux, M. Fink, and M. Tanter,
“Ultrasoundelastography: principles and techniques,” Diagnostic and
interventionalimaging, vol. 94, no. 5, pp. 487–495, 2013.
[32] C. Maleke and E. E. Konofagou, “In vivo feasibility of
real-timemonitoring of focused ultrasound surgery (fus) using
harmonic motionimaging (hmi),” IEEE Transactions on biomedical
Engineering, vol. 57,no. 1, pp. 7–11, 2009.
[33] S. Y. Lee, A. R. Cardones, J. Doherty, K. Nightingale, and
M. Palmeri,“Preliminary results on the feasibility of using
arfi/swei to assesscutaneous sclerotic diseases,” Ultrasound in
medicine & biology, vol. 41,no. 11, pp. 2806–2819, 2015.
[34] J. D’hooge, A. Heimdal, F. Jamal, T. Kukulski, B. Bijnens,
F. Rade-makers, L. Hatle, P. Suetens, and G. R. Sutherland,
“Regional strain andstrain rate measurements by cardiac ultrasound:
principles, implemen-tation and limitations,” European Journal of
Echocardiography, vol. 1,no. 3, pp. 154–170, 2000.
[35] P. Bihari, A. Shelke, T. Nwe, M. Mularczyk, K. Nelson, T.
Schmandra,P. Knez, and T. Schmitz-Rixen, “Strain measurement of
abdominal aorticaneurysm with real-time 3d ultrasound speckle
tracking,” EuropeanJournal of Vascular and Endovascular Surgery,
vol. 45, no. 4, pp. 315–323, 2013.
[36] K. Nightingale, D. Stutz, R. Bentley, and G. Trahey,
“Acoustic radiationforce impulse imaging: EX vivo and in vivo
demonstration of transientshear wave propagation,” in Proceedings -
International Symposium onBiomedical Imaging, vol. 2002-Janua, no.
2. Elsevier, feb 2002, pp.525–528.
[37] K. Nightingale, “Acoustic Radiation Force Impulse (ARFI)
Imaging: AReview,” Current Medical Imaging Reviews, vol. 7, no. 4,
pp. 328–339,nov 2011.
[38] M. Palmeri, M. Wang, J. Dahl, K. Frinkley, and K.
Nightingale,“Quantifying Hepatic Shear Modulus In Vivo Using
Acoustic RadiationForce,” Ultrasound in Medicine & Biology,
vol. 34, no. 4, pp. 546–558,apr 2008.
[39] G. F. Pinton, J. J. Dahl, and G. E. Trahey, “Rapid tracking
of smalldisplacements using ultrasound,” Proceedings - IEEE
Ultrasonics Sym-posium, vol. 4, no. 6, pp. 2062–2065, 2005.
[40] Y. Han, S. Wang, H. Hibshoosh, B. Taback, and E. Konofagou,
“Tumorcharacterization and treatment monitoring of postsurgical
human breastspecimens using harmonic motion imaging (HMI),” Breast
CancerResearch, vol. 18, no. 1, p. 46, 2016.
[41] R. Xia and A. K. Thittai, “Real-Time Monitoring of
High-IntensityFocused Ultrasound Treatment Using Axial Strain and
Axial-ShearStrain Elastograms,” Ultrasound in Medicine and Biology,
vol. 40, no. 3,pp. 485–495, mar 2014.
[42] C. Maleke and E. E. Konofagou, “In vivo feasibility of
real-timemonitoring of focused ultrasound surgery (FUS) using
harmonic motionimaging (HMI),” IEEE Transactions on Biomedical
Engineering, vol. 57,no. 1, pp. 7–11, jan 2010.
[43] S. A. Lee, H. A. S. Kamimura, M. T. Burgess, and E. E.
Konofagou,“Displacement imaging for focused ultrasound peripheral
nerve neu-romodulation,” IEEE Transactions on Medical Imaging, pp.
1–1, may2020.
[44] J. S. Jeong, J. H. Chang, and K. K. Shung, “Ultrasound
transducerand system for real-time simultaneous therapy and
diagnosis for non-invasive surgery of prostate tissue.” IEEE
transactions on ultrasonics,ferroelectrics, and frequency control,
vol. 56, no. 9, pp. 1913–22, sep2009.
[45] M. Fink, Bercoff, and Tanter, “Supersonic Shear Imaging : A
NewTechnique for Soft Tissue Elasticity Mapping,” IEEE transactions
onultrasonics, ferroelectrics, and frequency control, vol. 51, no.
4, pp.396–409, 2004.
[46] J. Luo and E. Konofagou, “A fast normalized
cross-correlation calcula-tion method for motion estimation,” IEEE
transactions on ultrasonics,ferroelectrics, and frequency control,
vol. 57, no. 6, pp. 1347–57, 2010.
[47] J. Vappou, G. Y. Hou, F. Marquet, D. Shahmirzadi, J.
Grondin, andE. E. Konofagou, “Non-contact, ultrasound-based
indentation methodfor measuring elastic properties of biological
tissues using harmonicmotion imaging (hmi),” Physics in Medicine
& Biology, vol. 60, no. 7,p. 2853, 2015.
[48] Y. Han, G. Y. Hou, S. Wang, and E. Konofagou, “High
intensity fo-cused ultrasound (HIFU) focal spot localization using
harmonic motionimaging (HMI),” Phys. Med. Biol., vol. 60, no. 15,
pp. 5911–5924, aug2015.
[49] D. L. Wong and C. M. Baker, “Pain in children: comparison
ofassessment scales,” Pediatr Nurs, vol. 14, no. 1, pp. 9–17,
1988.
[50] A. H. Dhanaliwala, J. A. Hossack, and F. W. Mauldin,
“Assessingand improving acoustic radiation force image quality
using a 1.5-Dtransducer design,” IEEE Trans. Ultrason. Ferroelectr.
Freq. Control,vol. 59, no. 7, pp. 1602–1608, 2012.
[51] V. Shamdasani and Y. Kim, “Two-dimensional autocorrelation
methodfor ultrasound-based strain estimation,” in Annu. Int. Conf.
IEEE Eng.Med. Biol. - Proc., vol. 26 II, 2004, pp. 1380–1383.
[52] V. K. Nielsen, “Sensory and motor nerve conduction in the
median nervein normal subjects,” Acta Med. Scand., vol. 194, no.
1-6, pp. 435–443,apr 2009.
[53] E. Tiran, T. Deffieux, M. Correia, D. Maresca, B.-F.
Osmanski, L.-A.Sieu, A. Bergel, I. Cohen, M. Pernot, and M. Tanter,
“Multiplane waveimaging increases signal-to-noise ratio in
ultrafast ultrasound imaging,”Physics in Medicine & Biology,
vol. 60, no. 21, p. 8549, 2015.
[54] J. Blackmore, S. Shrivastava, J. Sallet, C. R. Butler, and
R. O. Cleveland,“Ultrasound Neuromodulation: A Review of Results,
Mechanisms andSafety,” pp. 1509–1536, jul 2019.
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.
-
0885-3010 (c) 2020 IEEE. Personal use is permitted, but
republication/redistribution requires IEEE permission. See
http://www.ieee.org/publications_standards/publications/rights/index.html
for more information.
This article has been accepted for publication in a future issue
of this journal, but has not been fully edited. Content may change
prior to final publication. Citation information: DOI
10.1109/TUFFC.2020.3014183, IEEETransactions on Ultrasonics,
Ferroelectrics, and Frequency Control
IEEE TRANSACTIONS ON ULTRASONICS, FERROELECTRICS, AND FREQUENCY
CONTROL, VOL. ??, NO. ?, AUGUST 2019 12
Stephen A. Lee received the bachelor’s degree fromthe University
of North Carolina at Chapel Hill,Chapel Hill, NC, USA in 2015, and
the Master’sof Science degree from Columbia University, NewYork,
NY, USA in 2018. In 2016, he enrolledin the M.S./Ph.D. Program with
the Departmentof Biomedical Engineering, Columbia University,New
York, NY, USA where he is currently work-ing towards his Ph.D. His
current research inter-ests include studying the mechanism of
ultrasoundneuromodulation and how ultrasound imaging and
simulation techniques can be used understand this phenomenon. In
2019, hewas the recipient of the IEEE IUS student paper competition
award.
Hermes A.S. Kamimura (Member, IEEE) receivedthe B.S. degree in
medical physics and the M.S. andPh.D. degrees in physics applied to
medicine andbiology from the University of São Paulo,
RibeirãoPreto, Brazil, in 2008, 2011, and 2016, respectively.He
conducted research projects in therapeutic andultrasound imaging at
Mayo Clinic, Rochester, MN,USA, in 2010, and also at Columbia
University,New York, NY, USA, in 2014, in student exchangeprograms.
He was a Postdoctoral Research Scientistwith French Alternative
Energies and Atomic En-
ergy Commission (CEA), Gif-sur-Yvette, France, and also with
ColumbiaUniversity, where he is currently an Associate Research
Scientist. His researchinterests include harmonic motion imaging
and therapeutic ultrasound span-ning both ultrasound
neuromodulation and ultrasound mediated bloodbrainbarrier
disruption for targeted brain drug delivery. Dr. Kamimura is a
mem-ber of the Brazilian Physical Society and Brazilian Society of
BiomedicalEngineering. He was a recipient of the Outstanding
Reviewer Award forPhysics in Medicine and Biology, IOP Publishing
in 2018, and the Best Ph.D.Dissertation Award in the field of
medical physics in 2016 by the BrazilianPhysical Society. He serves
as a Topic Editor for Frontiers in Physics andFrontiers in
Physiology.
Elisa E. Konofagou (S98A99M03) is currently theRobert and
Margaret Hariri Professor of biomedicalengineering and a Professor
of radiology as well asthe Director of the Ultrasound and
Elasticity Imag-ing Laboratory with the Biomedical
EngineeringDepartment, Columbia University, New York, NY,USA. She
has co-authored over 170 peer-reviewedjournal articles. Her current
research interests in-clude the development of novel elasticity
imag-ing techniques and therapeutic ultrasound methodsand more
notably, myocardial elastography, elec-
tromechanical and pulse wave imaging, harmonic motion imaging,
focusedultrasound therapy, and drug delivery in the brain, with
several clinicalcollaborations in the Columbia Presbyterian Medical
Center, New York, NY,USA, and elsewhere. Prof. Konofagou was a
recipient of awards, such as theCAREER Award from the National
Science Foundation and the Nagy Awardfrom the National Institutes
of Health as well as others from the AmericanHeart Association, the
Acoustical Society of America, the American Instituteof Ultrasound
in Medicine, the Wallace H. Coulter Foundation, the
BodossakiFoundation, the Society of Photo-Optical Instrumentation
Engineers, andthe Radiological Society of North America. She is a
Technical CommitteeMember of the Acoustical Society of America, the
International Societyof Therapeutic Ultrasound, the IEEE
Engineering in Medicine and BiologyConference, the IEEE
International Ultrasonics Symposium, and the AmericanAssociation of
Physicists in Medicine. She serves as an Associate Editor forthe
IEEE Transactions on ultrasonics, ferroelectrics, and frequency
control,Ultrasonic Imaging, and Medical Physics.
Authorized licensed use limited to: Columbia University
Libraries. Downloaded on August 14,2020 at 09:00:42 UTC from IEEE
Xplore. Restrictions apply.