Embed Size (px)
Citation preview
Diseno de Controladores Anal ogicos.
Dpt. Ingenier´ıa de Sistemas y Autom atica
ETSII. Universidad de Valladolid
Paseo del Cauce, s/n
Valladolid, SPAIN 47011
Contenido.
� Introduccion.
� Controlador proporcional, integral y derivativo (PID).
� Tecnicas clasicas de diseno.
� Sintonizacion directa de PIDs.
� Estructuras de control complejas.
� Metodos avanzados de control.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 1

Introducci on: Sistemas en lazo abierto.
� Relacion Dinamica Entrada-Salida �� Ecuacion Diferencial.
������
���� � � �� ��� � ��
������
���� � � �� ���
� Propiedades de un sistema lineal:
– Si ������������� � ������� ������ ��
������ � ������� ������ � �����.
– Si ������ ����� �� � � ����� � � � �����
� Las relaciones fısicas son normalmente no lineales.
Ejemplo: Relacion voltaje/rmp de un motor.
� Los sistemas no lineales son linealizados en un punto de equilibrio
para su estudio y diseno de controladores.
Sea � �� � �� �� � , P.Equ. ��� ���� � �� ��� �
Ecuacion linealizada en P.E.��
� ��
�����
�� � � � ��
��
��
�����
� �
� Funcion de transferencia: Transformada de Laplace del sistema
lineal�����
�:
� � �
�� �� � � � �
�� � � � � �� ��
� � � � �� ���
– Salida a una entrada impulso ���� � Æ���,
���� � ���� (funcion ponderatriz) � � � � � � � �.
Ejemplo: � � � � �
. Impulso entrada � Escalon salida.
– Salida a entrada ����, integral de convolucion,
���� �� �� ���� �������� � � � � � � � ��� �.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 2
Introducci on: An alisis del sistema � � �.
� �� � � � � � � � . El sistema se encuentra en el P.E.
� Estabilidad �� Posicion de polos de � � � en plano :
– Polos con parte real positiva � Inestables.
– Polos con parte real negativa � Estables.
– Polos en el eje imaginario � Crıticamente estables.
– Polos en origen � Integradores.
� Relacion lımite � � � con ����: Th. del valor final e inicial:
– Valor final: �� ��� ���� � �� �� � � �
Si dicho l´ımite existe en el tiempo !!!!
– Valor inicial: �� ��� ���� � �� �� � � �
Derivada en Origen: �� ���������
� �� �� �� � �
� Respuesta temporal ���� a entrada escalon unitaria ����:
– Estacionario: Ganancia de � � �, �� �� � � �.
– Transitorio: Polos y ceros de � � �.
� Polos dominantes: Dinamicas de primer o segundo orden.
Velocidad de respuesta y sobrepico.
� Ceros de un sistema: Dinamicas contrapuestas en signo.
� Respuesta en frecuencia: Salida senoidal a entrada senoidal.
Bode, relacion de amplitudes y desfases. Relacion:
– Ancho de banda � Velocidad de respuesta.
– Pico de resonancia � Sobrepico.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 3
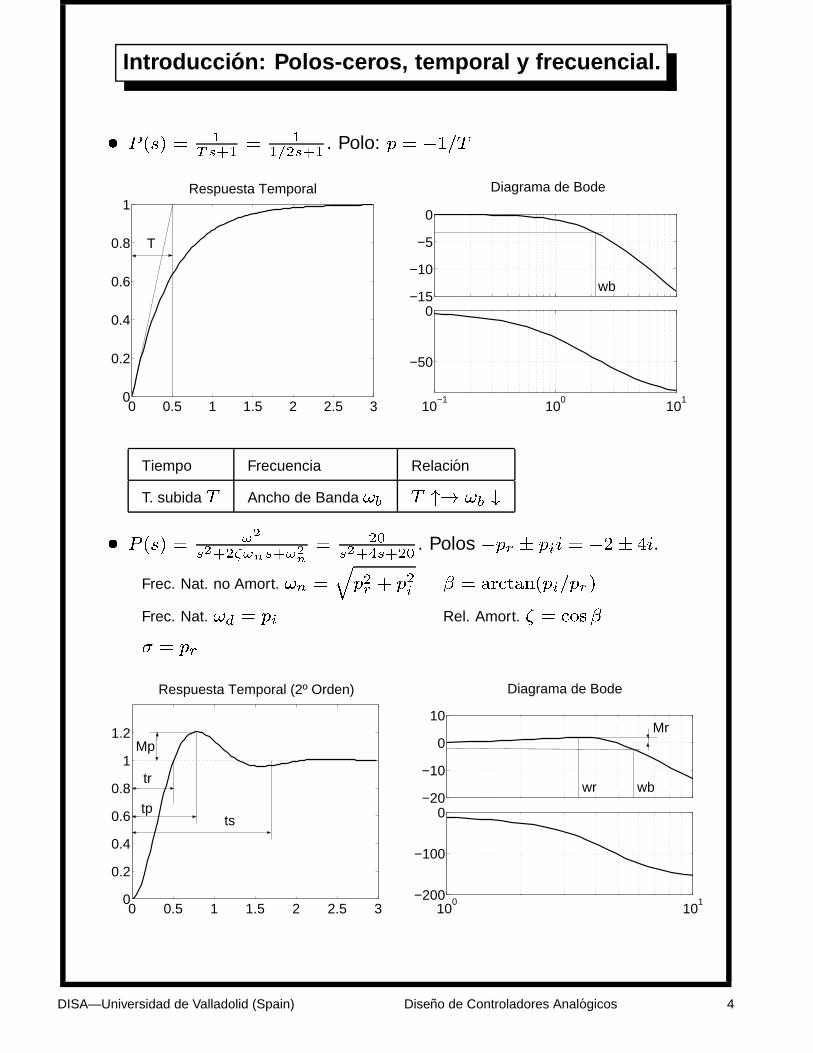
Introducci on: Polos-ceros, temporal y frecuencial.
� � � � � ����
� ������
. Polo: � � ����
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1Respuesta Temporal
T
Diagrama de Bode
−15
−10
−5
0
10−1
100
101
−50
0
wb
Tiempo Frecuencia Relacion
T. subida � Ancho de Banda � � �� � �
� � � � � ��
����������� ��
������. Polos ��� � ��� � ��� ��.
Frec. Nat. no Amort. �� ����� � ��� � � �������������
Frec. Nat. �� � �� Rel. Amort. � � ��� �
� � ��
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
Respuesta Temporal (2º Orden)
Mp
tr
tp ts
Diagrama de Bode
−20
−10
0
10
100
101−200
−100
0
wr
Mr
wb
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 4
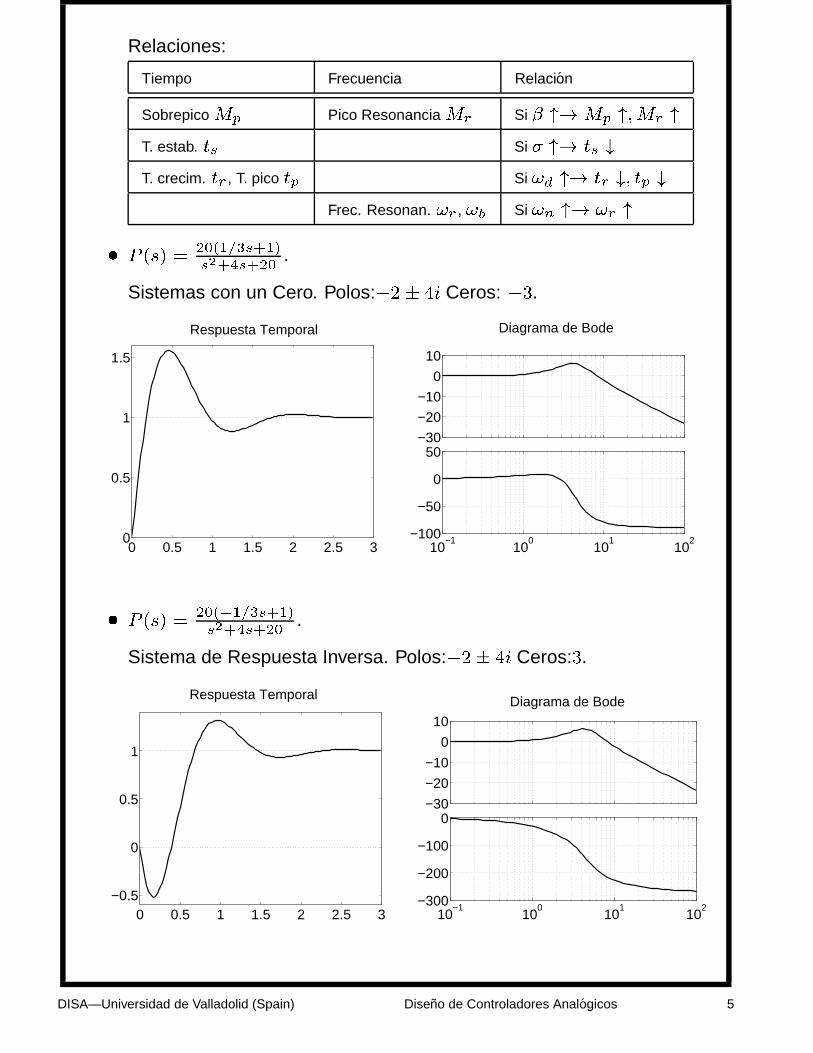
Relaciones:
Tiempo Frecuencia Relacion
Sobrepico�� Pico Resonancia�� Si � ���� ��� �
T. estab. � Si � �� � �
T. crecim. �� , T. pico �� Si �� �� �� � �� �
Frec. Resonan. �� , � Si �� �� �� �
� � � � ����������������
.
Sistemas con un Cero. Polos:��� �� Ceros: ��.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
Respuesta Temporal Diagrama de Bode
−30
−20
−10
0
10
10−1
100
101
102−100
−50
0
50
� � � � �����������������
.
Sistema de Respuesta Inversa. Polos:��� �� Ceros:�.
Respuesta Temporal
0 0.5 1 1.5 2 2.5 3−0.5
0
0.5
1
Diagrama de Bode
−30
−20
−10
0
10
10−1
100
101
102−300
−200
−100
0
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 5
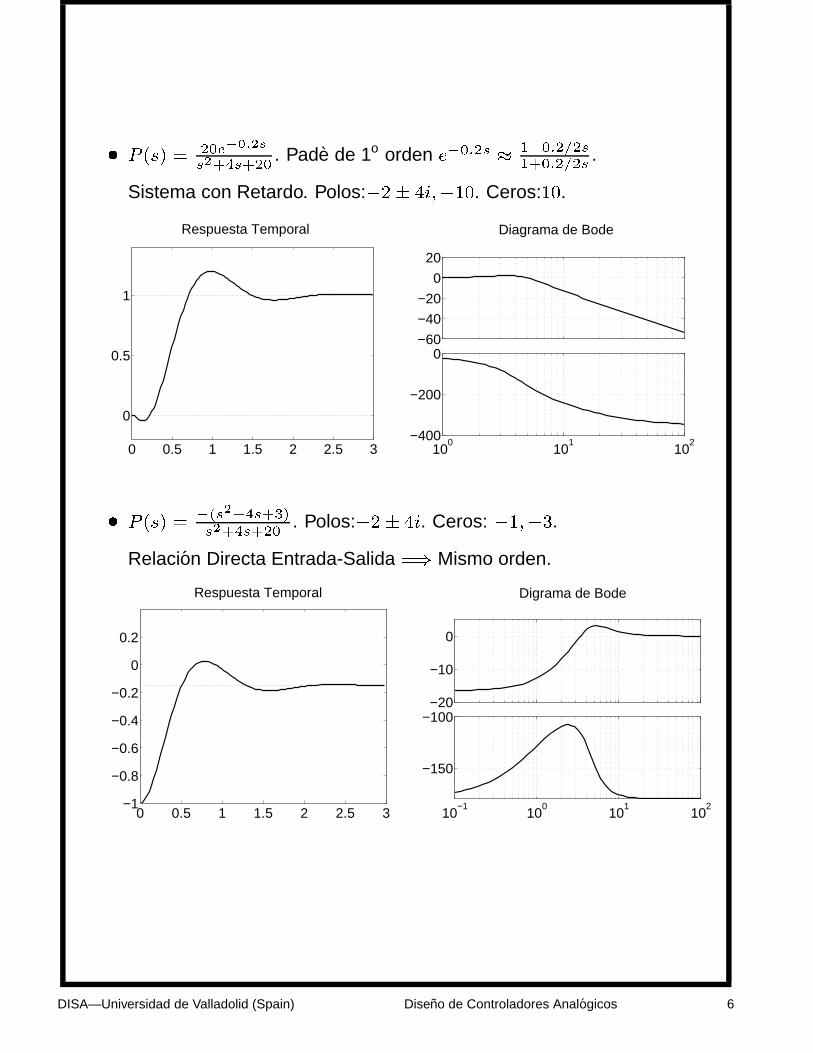
� � � � � ��������
������. Pade de 1o orden ����� �������
�������.
Sistema con Retardo. Polos:��� ����. Ceros:�.
Respuesta Temporal
0 0.5 1 1.5 2 2.5 3
0
0.5
1
Diagrama de Bode
−60
−40
−20
0
20
100
101
102−400
−200
0
� � � � ���������������
. Polos:��� ��. Ceros: ����.
Relacion Directa Entrada-Salida �� Mismo orden.
Respuesta Temporal
0 0.5 1 1.5 2 2.5 3−1
−0.8
−0.6
−0.4
−0.2
0
0.2
Digrama de Bode
−20
−10
0
10−1
100
101
102
−150
−100
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 6
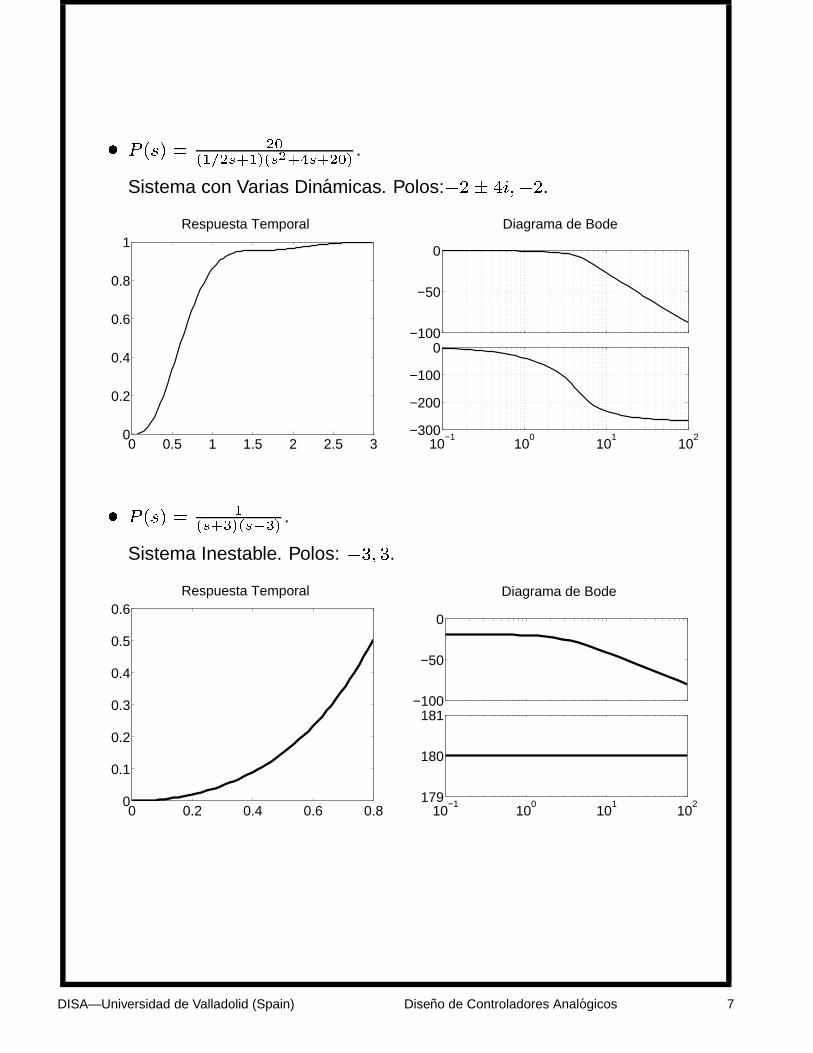
� � � � � �����������������
.
Sistema con Varias Dinamicas. Polos:��� ����.
Respuesta Temporal
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1Diagrama de Bode
−100
−50
0
10−1
100
101
102−300
−200
−100
0
� � � � � ��������� .
Sistema Inestable. Polos: �� �.
Respuesta Temporal
0 0.2 0.4 0.6 0.80
0.1
0.2
0.3
0.4
0.5
0.6Diagrama de Bode
−100
−50
0
10−1
100
101
102179
180
181
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 7
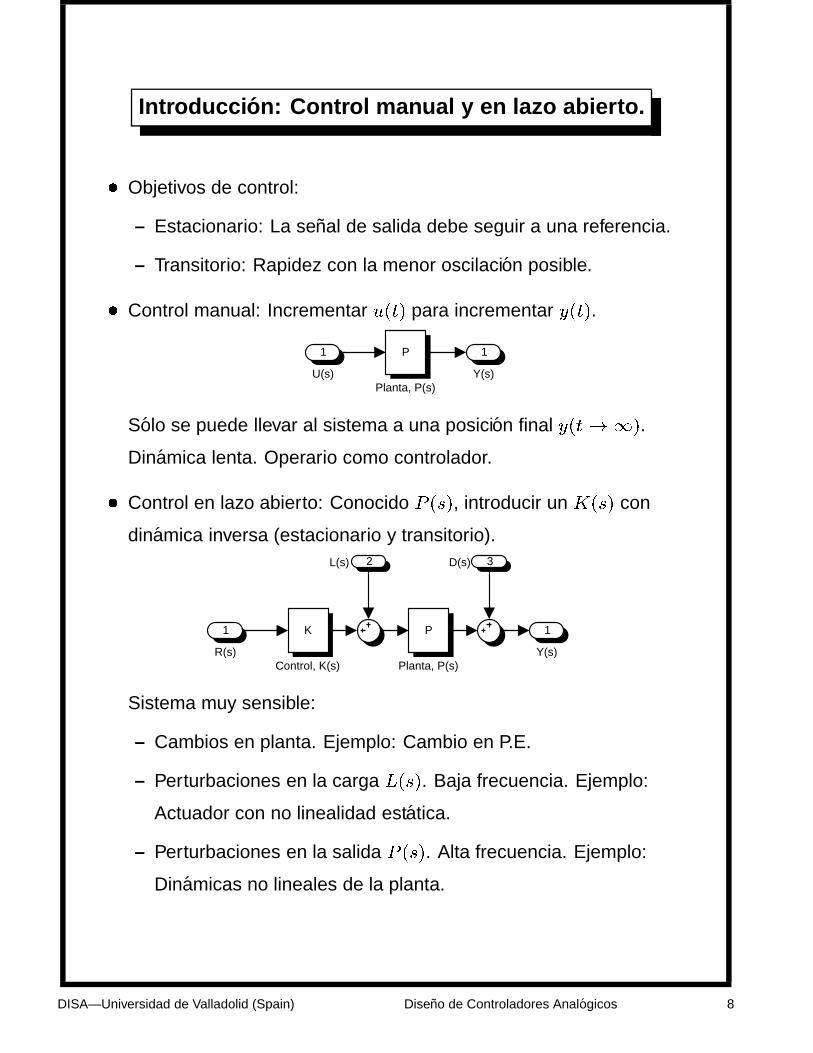
Introducci on: Control manual y en lazo abierto.
� Objetivos de control:
– Estacionario: La senal de salida debe seguir a una referencia.
– Transitorio: Rapidez con la menor oscilacion posible.
� Control manual: Incrementar ���� para incrementar ����.
1
Y(s)
P
Planta, P(s)
1
U(s)
Solo se puede llevar al sistema a una posicion final �����.
Dinamica lenta. Operario como controlador.
� Control en lazo abierto: Conocido � � �, introducir un �� � con
dinamica inversa (estacionario y transitorio).
1
Y(s)
P
Planta, P(s)
K
Control, K(s)
3D(s)2L(s)
1
R(s)
Sistema muy sensible:
– Cambios en planta. Ejemplo: Cambio en P.E.
– Perturbaciones en la carga �� �. Baja frecuencia. Ejemplo:
Actuador con no linealidad estatica.
– Perturbaciones en la salida � � �. Alta frecuencia. Ejemplo:
Dinamicas no lineales de la planta.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 8
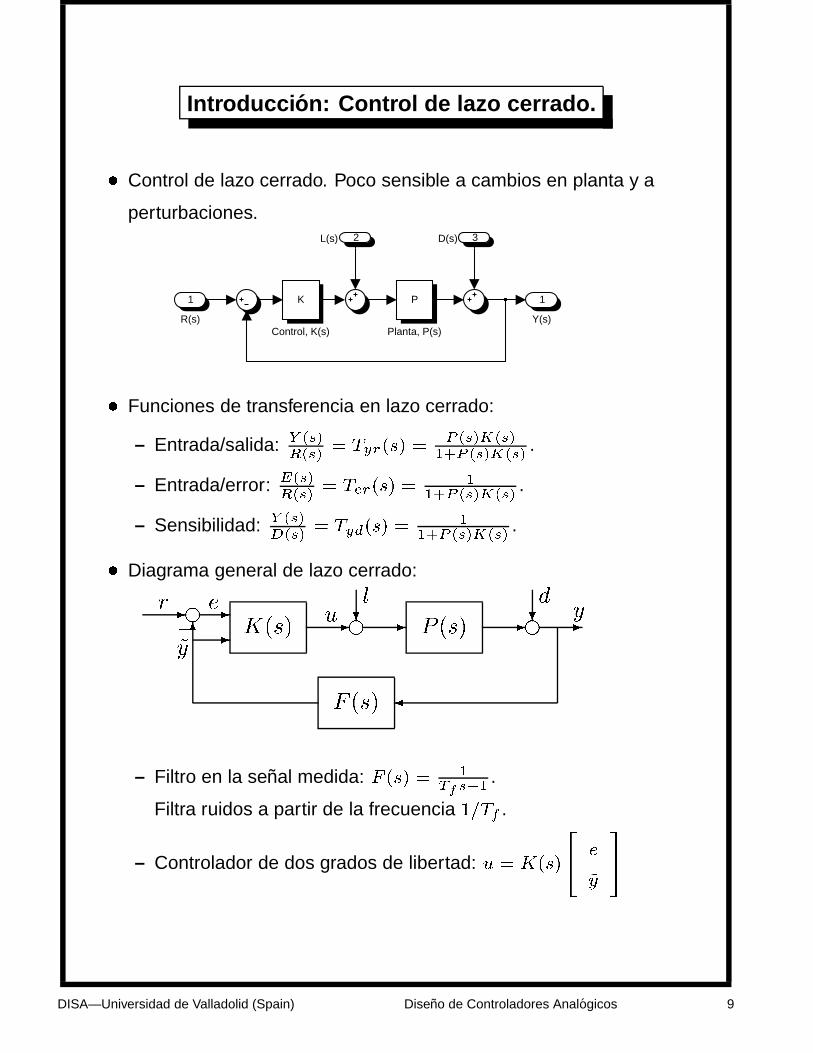
Introducci on: Control de lazo cerrado.
� Control de lazo cerrado. Poco sensible a cambios en planta y a
perturbaciones.
1
Y(s)
P
Planta, P(s)
K
Control, K(s)
3D(s)2L(s)
1
R(s)
� Funciones de transferencia en lazo cerrado:
– Entrada/salida: � �����
� ��� � �� �����
��� �����.
– Entrada/error: ������
� ���� � � ���� �����
.
– Sensibilidad: � �����
� ��� � � ���� �����
.
� Diagrama general de lazo cerrado:
�� �� � �� � ���
� ���
�� �
���� � �
�
��
� � ��
�
– Filtro en la senal medida: � � � �����
.
Filtra ruidos a partir de la frecuencia ���� .
– Controlador de dos grados de libertad: � � �� �
�� �
��
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 9
Introducci on: Objetivos y metodolog´ ıa de control.
� Objetivos de control:
– Estacionarios: Reducen el error (��) ante una determinada
entrada. Indices de medida:
� Th. valor final del error ante cierta entrada:
�� �� ���� ��� � � �� � � �� �� � � � ��
� Integral temporal del error ante entrada escalon:
CIEC ���� ������� , CIEA �
��� ��������
Indices ponderados en tiempo: Mezclan estacionario y
transitorio: CIECT��� �������� , CIEAT
��� ���������.
– Objetivos transitorios: Rapidez de respuesta sin oscilacion.
Indices de medida:
� Polos y ceros del sistema � � ��� � en lazo cerrado (L.R).
� Margen de fase y ganancia del sistema � � ��� � en lazo
abierto (Bode).
� Indices ponderados en tiempo: CIECT, CIEAT.
� El diseno de controladores es un problema de optimizacion: Buscar
el controlador que optimice los ındices.
� Metodologıa de control:
– Linealizar el sistema en un P.E.
– Aplicar tecnicas de control para sistemas lineales.
– Comprobar con simulacion la eficiencia del controlador en el
sistema no lineal.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 10
Introducci on: Tecnolog´ ıa de control.
� Sensores: General.
– Funcionamiento estatico o dinamico.
– Caracterısticas: Campo de operacion, precision, zona muerta,
histeresis.
� Sensores de variables mecanicas:
– Sensores de posicion y desplazamiento lineal: Potenciometros,
sincros, encoder.
– Sensores de proximidad: Fotoeletricos.
– Sensores de velocidad: Tacometros y opticos.
– Sensores de aceleracion: Acelerometros.
� Sensores de variables de procesos:
– Sensores de temperatura: Bimetalicos, de resistencia
termopares.
– Sensores de presion: Galgas estensiometricas, tubos Bourdon,
fuelles y diafragmas.
– Sensores de nivel: Flotadores, de presion estatica y diferencial y
de capacidad.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 11

Introducci on: Tecnolog´ ıa de control.
� Actuadores:
– Interruptores mecanicos.
– Reles (interruptores electricos).
– Valvulas y actuadores hidraulicos y neumaticos.
– Elementos electricos de calentamiento.
– Motores:
� Motores de induccion y sincronos.
� Motor de corriente continua.
� Motores paso a paso.
� Normas ISA de sımbolos en diagrama de procesos.
– Sımbolos de lıneas: Mecanicas, electricas, neumaticas e
indefinidas.
– Letras de identificacion:Sımbolo Primera letra Sucesivas letras
A Analisis Alarma
C Conductividad Control
D Densidad
E Voltaje
F Flujo
I Corriente Indicador
L Nivel
M Humedad
P Presion
T Temperatura Transmisor
V Viscosidad Valvula
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 12
Controladores PIDs: Acciones de control.
� Acciones: ���� � �� ��� � ����� � �����.
� Accion proporcional: �� ��� � ������.
– ��: Ganancia del controlador.
– Trabaja en funcion del error presente.
– Problemas con cambios bruscos en referencia, �� �.
– Ponderacion de referencia. Dos grados de libertad:
�� � � � ������ �� �� � �� � � � � ��.
� Accion integral: ����� � ��� � ������ � ��
��
� � ������.– ��: Const. integracion. ��: Tiempo de integracion.
– Trabaja en funcion del error pasado. Reduce error estacionario.
– En el espacio : �� � � � ���� � �.
� Accion derivativa: ����� � ���������
� �����������
– ��: Const. de derivacion. ��: Tiempo de derivacion.
– Trabaja en funcion de la tendencia de error.
– Problemas con saltos bruscos en referencia y con ruido en la
senal medida.
– Ponderacion de referencia y filtro de senal.
��� � � ����������
�!�� �� �� � �� � � ! � � " �
– A veces no es util por el excesivo ruido de la planta.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 13

Controladores PIDs: Formulaciones.
� Formulacion general paralela:
�� � � ������ �� �� � �� � ���� � � � ����
�������!�� �� �� � ��
� � !� � � " �.
– Forma reducida, � � ! � � " �,
�� � � ���� � ���
� �� � � �.
– Polos del PID: Integrador � �. Filtro derivada � "����.
– Ceros del PID: Reales si �� # ���.
– Utiles para plantas con y sin oscilacion.
� Formulacion serie: Union en serie de un PI(s) y PD(s),
�� � � PI� �PD� � � � � ���
�� � �
� ��
����� ��
��� ����
� � �.
– Polos de PID: Integrador � �. Filtro PD � "�� ���.
– Ceros reales e inversos a � �� y � ��. Facil interpretacion.
– Equivalencia con la forma paralela si �� # ���.
– Utiles en plantas sin oscilacion.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 14
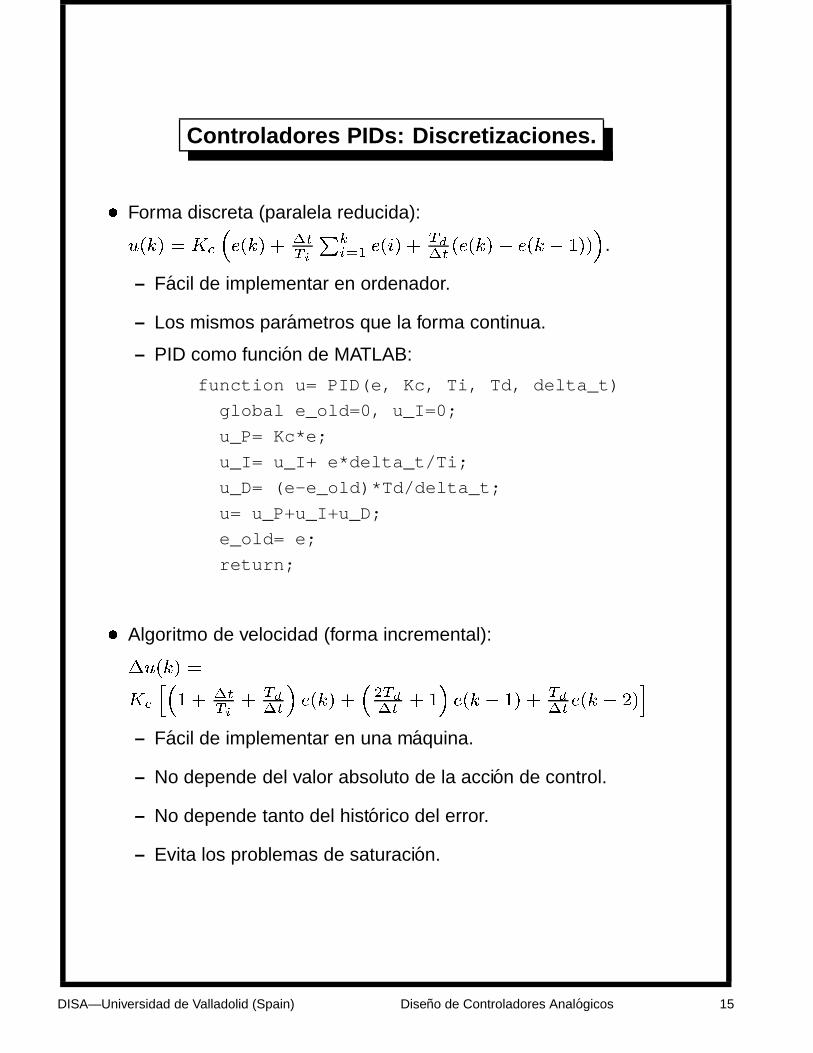
Controladores PIDs: Discretizaciones.
� Forma discreta (paralela reducida):
���� � ������� � �
��
���� ���� �
���
����� � ��� � ����
.
– Facil de implementar en ordenador.
– Los mismos parametros que la forma continua.
– PID como funcion de MATLAB:
function u= PID(e, Kc, Ti, Td, delta_t)
global e_old=0, u_I=0;
u_P= Kc*e;
u_I= u_I+ e*delta_t/Ti;
u_D= (e-e_old)*Td/delta_t;
u= u_P+u_I+u_D;
e_old= e;
return;
� Algoritmo de velocidad (forma incremental):
���� �
����
� � ���
� ���
����� �
�����
� ����� � �� � ��
���� � ��
– Facil de implementar en una maquina.
– No depende del valor absoluto de la accion de control.
– No depende tanto del historico del error.
– Evita los problemas de saturacion.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 15

PIDs: Acciones no lineales. Conclusi on.
� Saturacion y accion integral.
– Origen: Efecto Windup y cambio de modo manual a automatico.
– Error grande � Gran accion de control con satucion de planta.
– Saturacion planta � Incremento accion integral sin resultado.
– Cuando el error desaparece la accion integral acumulada hace
oscilar al sistema.
� Acciones de control no lineales:
– Poner a cero la accion integral ante saturaciones.
– Realimentar la diferencia entre la accion deseada y la saturada al
integrador.
� Objetivos de control: Sintonizar los parametros �� �� �� � !"�.
– Sintonizacion manual. Util en plantas sencillas.
– Uso de tecnicas clasicas. Facil de ver acciones.
– Uso de tablas de optimizacion con respecto a ındices. Metodos
sistematicos empleados en los PIDs comerciales.
– Otros metodos: Aplicacion de tecnicas de optimizacion directa.
� Conclusiones:
– Los PIDs constituyen el ��� de los controladores industriales.
– Todo ingeniero dedicado a la produccion industrial se
encontraran con ellos en su vida profesional.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 16
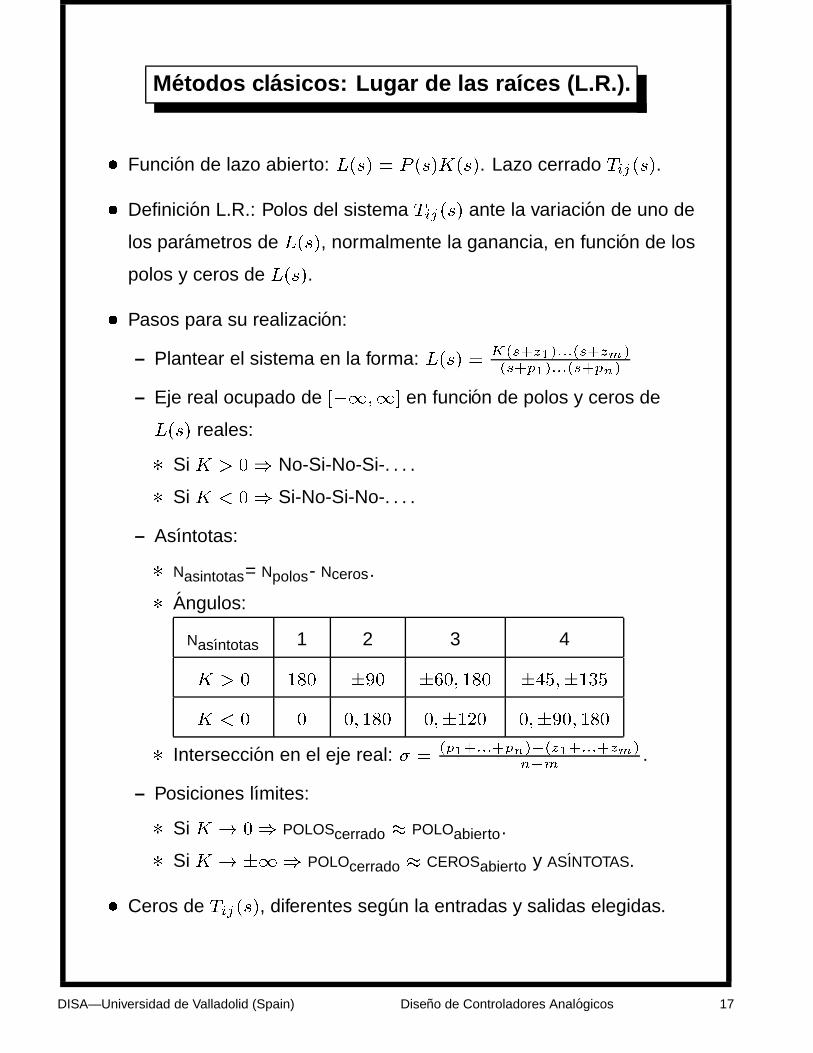
Metodos cl asicos: Lugar de las ra´ ıces (L.R.).
� Funcion de lazo abierto: �� � � � � ��� �. Lazo cerrado ���� �.
� Definicion L.R.: Polos del sistema ���� � ante la variacion de uno de
los parametros de �� �, normalmente la ganancia, en funcion de los
polos y ceros de �� �.
� Pasos para su realizacion:
– Plantear el sistema en la forma: �� � ����������������������������
– Eje real ocupado de ��� en funcion de polos y ceros de
�� � reales:
� Si � # � No-Si-No-Si-. . . .
� Si � $ � Si-No-Si-No-. . . .
– Asıntotas:
� Nasintotas= Npolos- Nceros.
� Angulos:
Nasıntotas 1 2 3 4
� # �� �� �� �� �������
� $ �� ��� �� ��
� Interseccion en el eje real: � ������������������������
��� .
– Posiciones lımites:
� Si � � � POLOScerrado POLOabierto.
� Si � � �� POLOcerrado CEROSabierto y ASINTOTAS.
� Ceros de ���� �, diferentes segun la entradas y salidas elegidas.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 17
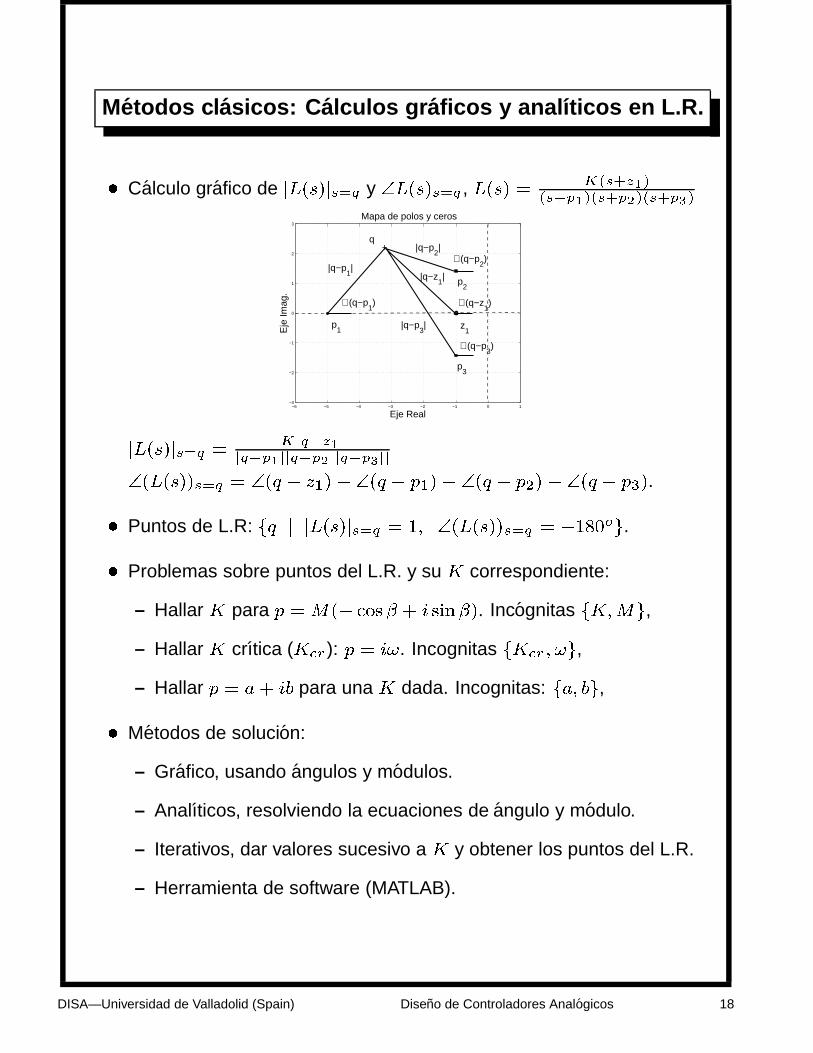
Metodos cl asicos: C alculos gr aficos y anal´ ıticos en L.R.
� Calculo grafico de ��� ��� y ��� �� , �� � �������
���������������
−6 −5 −4 −3 −2 −1 0 1−3
−2
−1
0
1
2
3 Mapa de polos y ceros
Eje Real
Eje
Imag
.
+ q
p1
p2
p3
z1
∠ (q−p1)
∠ (q−p2)
∠ (q−z1)
∠ (q−p3)
|q−p1|
|q−p2|
|q−z1|
|q−p3|
��� ��� ��������
����������������������� ��� � ��% � &��� ��% � ���� ��% � ���� ��% � ���.
� Puntos de L.R: % � ��� ��� � � ���� ��� � �����.
� Problemas sobre puntos del L.R. y su � correspondiente:
– Hallar � para � ���� ��� � � � �����. Incognitas ���,
– Hallar � crıtica (���): � � ��. Incognitas ��� ��,
– Hallar � � �� �� para una � dada. Incognitas: � ��,
� Metodos de solucion:
– Grafico, usando angulos y modulos.
– Analıticos, resolviendo la ecuaciones de angulo y modulo.
– Iterativos, dar valores sucesivo a � y obtener los puntos del L.R.
– Herramienta de software (MATLAB).
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 18

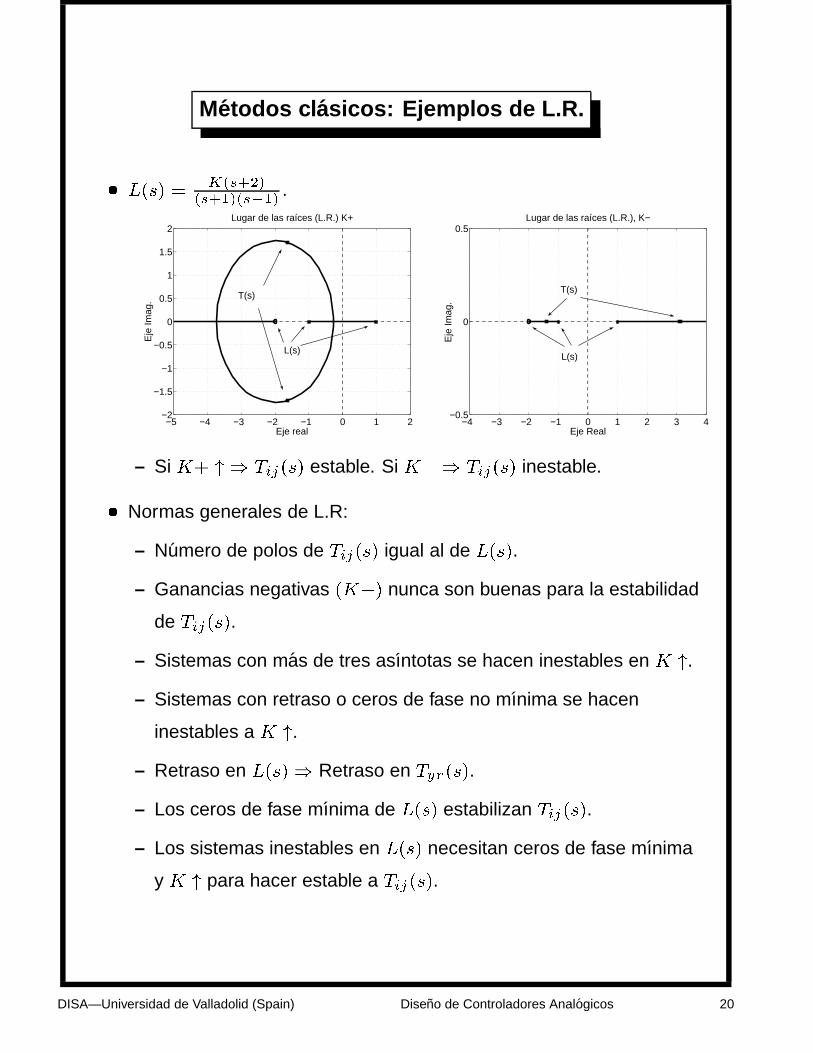
Metodos cl asicos: Ejemplos de L.R.
.
� �� � � �������������
: Nasin � �,
−4 −3 −2 −1 0 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Lugar de las raíces (L.R.), K+
Eje
Imag
.
Eje Real
L(s)
T(s)
M
β
−4 −3 −2 −1 0 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Eje Real
Eje
Imag
.
Lugar de las raíces (L.R.) K−
L(s)
T(s)
– Hallar � para � ���� ��� � � � �����. Incognitas ���,
��� ��� � � ��� �� � ���, o iteracion de �.
– Si �� �,�� � � ���� � inestable.
� �� � � ���
�� ���
�� �
�
�� �
�� ����
����
, aproximacion de Pade.
−4 −2 0 2 4 6−4
−3
−2
−1
0
1
2
3
4Lugar de las raíces (L.R.), K+
Eje
Imag
.
Eje Real
L(s)
T(s)
−6 −4 −2 0 2−1
−0.5
0
0.5
1
Eje Real
Eje
Imag
.
Lugar de las raíces (L.R.), K−
L(s)
T(s)
– Si �� �,�� � � ���� � inestable.
– Sistema �� � con retraso � Sistema ��� � con retraso.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 19
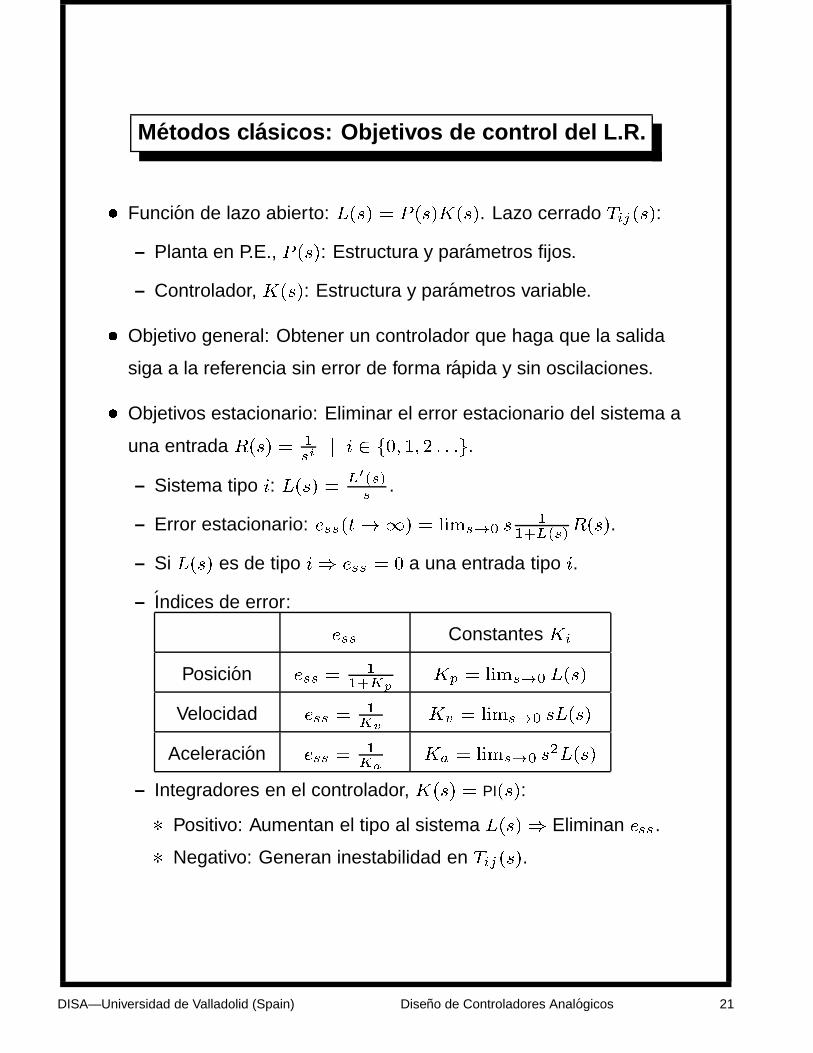
Metodos cl asicos: Ejemplos de L.R.
� �� � ������
�������� .
−5 −4 −3 −2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Lugar de las raíces (L.R.) K+
Eje
Imag
.
Eje real
L(s)
T(s)
−4 −3 −2 −1 0 1 2 3 4−0.5
0
0.5
Eje Real
Eje
Imag
.
Lugar de las raíces (L.R.), K−
L(s)
T(s)
– Si �� � � ���� � estable. Si �� � ���� � inestable.
� Normas generales de L.R:
– Numero de polos de ���� � igual al de �� �.
– Ganancias negativas ���� nunca son buenas para la estabilidad
de ���� �.
– Sistemas con mas de tres asıntotas se hacen inestables en � �.
– Sistemas con retraso o ceros de fase no mınima se hacen
inestables a � �.
– Retraso en �� �� Retraso en ��� �.
– Los ceros de fase mınima de �� � estabilizan ���� �.
– Los sistemas inestables en �� � necesitan ceros de fase mınima
y � � para hacer estable a ���� �.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 20
Metodos cl asicos: Objetivos de control del L.R.
� Funcion de lazo abierto: �� � � � � ��� �. Lazo cerrado ���� �:
– Planta en P.E., � � �: Estructura y parametros fijos.
– Controlador, �� �: Estructura y parametros variable.
� Objetivo general: Obtener un controlador que haga que la salida
siga a la referencia sin error de forma rapida y sin oscilaciones.
� Objetivos estacionario: Eliminar el error estacionario del sistema a
una entrada �� � � ��
� � � � � � � ��.
– Sistema tipo �: �� � � ���
.
– Error estacionario: ����� � �� �� �
�� ���� �.
– Si �� � es de tipo �� � � a una entrada tipo �.
– Indices de error:
� Constantes ��
Posicion � � ����
�� � �� �� �� �
Velocidad � � ��
�! � �� �� �� �
Aceleracion � � ���
�" � �� �� ��� �
– Integradores en el controlador, �� � � PI� �:
� Positivo: Aumentan el tipo al sistema �� �� Eliminan �.
� Negativo: Generan inestabilidad en ���� �.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 21
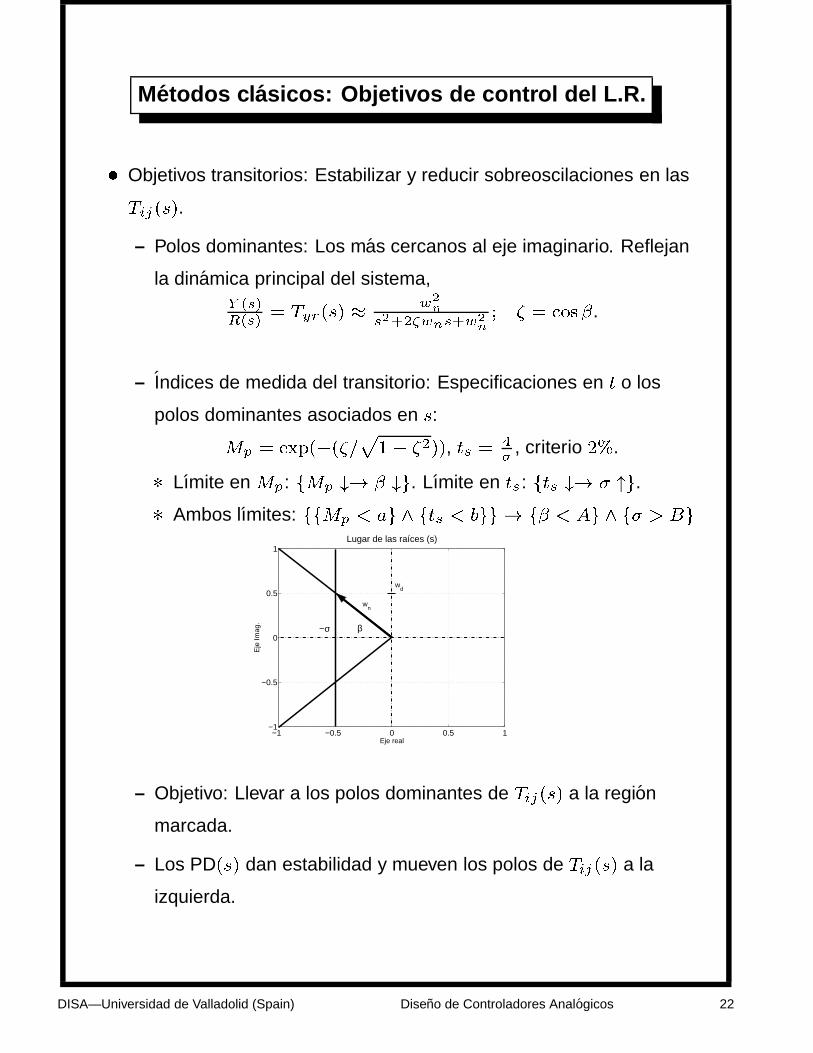
Metodos cl asicos: Objetivos de control del L.R.
� Objetivos transitorios: Estabilizar y reducir sobreoscilaciones en las
���� �.
– Polos dominantes: Los mas cercanos al eje imaginario. Reflejan
la dinamica principal del sistema,� �����
� ��� � #��
����#��#��� � � ����.
– Indices de medida del transitorio: Especificaciones en � o los
polos dominantes asociados en :
�� � !"������
�� ����, � � �$
, criterio ��.
� Lımite en ��: �� �� � ��. Lımite en �: � �� � ��.
� Ambos lımites: �� $ �� � � $ ��� � � $ '� � � # (�
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
Eje real
Eje
Imag
.
Lugar de las raíces (s)
β −σ
wd
wn
– Objetivo: Llevar a los polos dominantes de ���� � a la region
marcada.
– Los PD� � dan estabilidad y mueven los polos de ���� � a la
izquierda.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 22
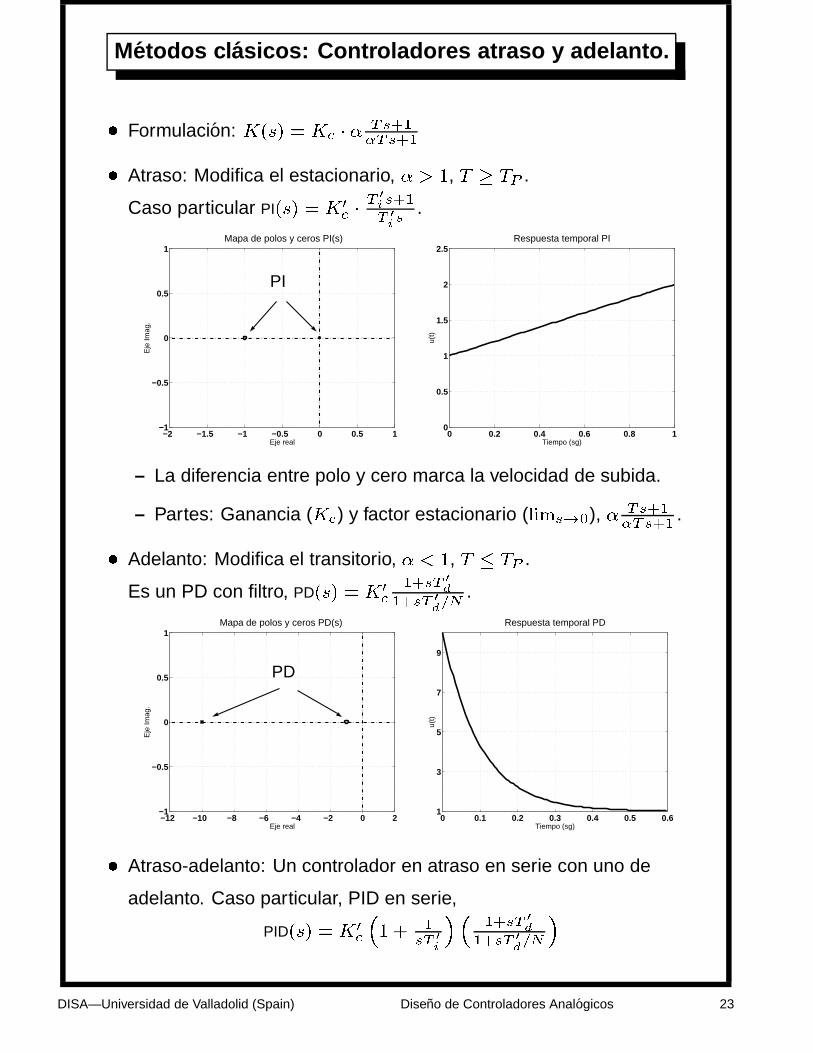
Metodos cl asicos: Controladores atraso y adelanto.
� Formulacion: �� � � �� � ����%���
� Atraso: Modifica el estacionario, � # �, � � �� .
Caso particular PI� � � ��� �
� ����
� ��
.
−2 −1.5 −1 −0.5 0 0.5 1−1
−0.5
0
0.5
1 Mapa de polos y ceros PI(s)
Eje real
Eje
Imag
.
PI
0 0.2 0.4 0.6 0.8 10
0.5
1
1.5
2
2.5Respuesta temporal PI
Tiempo (sg)
u(t)
– La diferencia entre polo y cero marca la velocidad de subida.
– Partes: Ganancia (��) y factor estacionario (�� ��), � ���%���
.
� Adelanto: Modifica el transitorio, � $ �, � � �� .
Es un PD con filtro, PD� � � ���
��� ����� �
���
.
−12 −10 −8 −6 −4 −2 0 2−1
−0.5
0
0.5
1Mapa de polos y ceros PD(s)
Eje real
Eje
Imag
.
PD
0 0.1 0.2 0.3 0.4 0.5 0.61
3
5
7
9
Respuesta temporal PD
Tiempo (sg)
u(t)
� Atraso-adelanto: Un controlador en atraso en serie con uno de
adelanto. Caso particular, PID en serie,
PID� � � ���
�� � �
� ��
����� ��
��� ����
�
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 23
Metodos cl asicos: Herramientas matem aticas en L.R.
� Problema: Encontrar un �� �, para que % � L.R.
– Puntos de L.R: % � ��� ��� � � ��� �� � �����.
Por tanto: ���%�� � ��� ���� ����%�� � ���� ��� �%��.
� Posible solucion grafica o analıtica.
� Dos ecuaciones � Se fijaran todos los parametros del
controlador menos dos.
– Puntos del L.R: Polos del denominador de ���� �, (��),
Si � � � �&��'��
y �� � �(��� ��
, siendo ���� � �� �����
��� �����,
Ecuacion diofantica: (� �)� � �'� �� � � ������ � ���.
� El coeficiente de � debe ser 1 en ambos lados.
� * � orden�� � �� � orden��� �� � orden����� ��.
� Se dispone de * ecuaciones al igualar coeficientes.
� Se fijaran todas las incognitas, �� y parametros del controlador,
menos *.
� Uno (o mas) de los polos de ���� � seran los deseados:
�� � %.
– Herramienta de software (MATLAB).
� Accion estacionaria de un controlador (��): �� ��������%���
.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 24
Metodos cl asicos: Estrategias de control.
� Fase previa:
– Pasar objetivos transitorios a polos dominantes de ���� �.
– Fijar objetivos estacionarios.
� Primera estrategia (plantas sin mucha oscilacion):
– Plantear el L.R. para controlador estatico �� � � ��.
– Ver si para alguna �� se consigue los polos de ���� �:
� Sı se puede: Disenar un �atraso� � sin �� para estacionario.
� No se puede: Disenar �adelanto� � para transitorio y luego uno
�atraso� � sin �� para estacionario.
� Segunda estrategia (plantas sin mucha oscilacion):
– Agregar integradores (PIs) al controlador hasta cumplir con
estacionarios.
– Mover los ceros del los PIs para intentar obtener el transitorio.
� Sı se puede: Obtener el valor de ��.
� No se puede: Anadir los PDs necesarios y obtener ��.
� Tercera estrategia (plantas con mucha oscilacion):
– Agregar integradores (PIs) al controlador hasta cumplir con
estacionarios.
– Agregar ceros complejos conjugados para eliminar oscilacion.
– Obtener los parametros del PID paralelo con dichos ceros y
polos.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 25
Metodos cl asicos: Ejemplos de dise no en L.R.
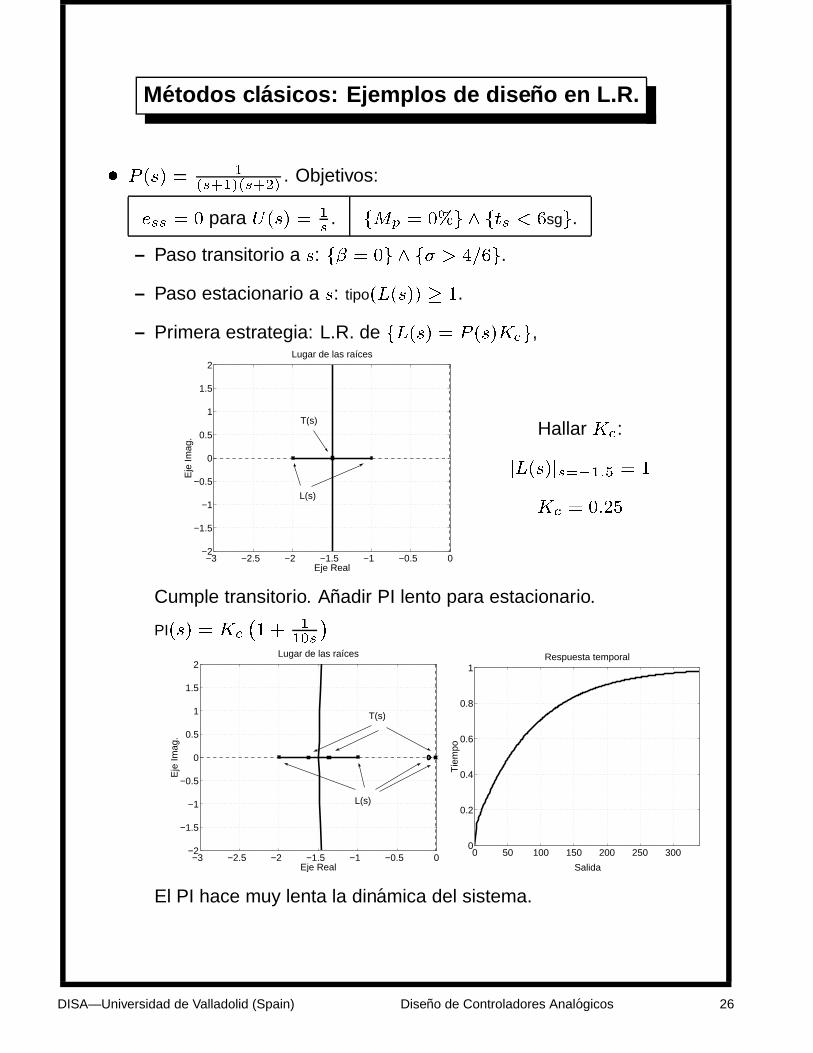
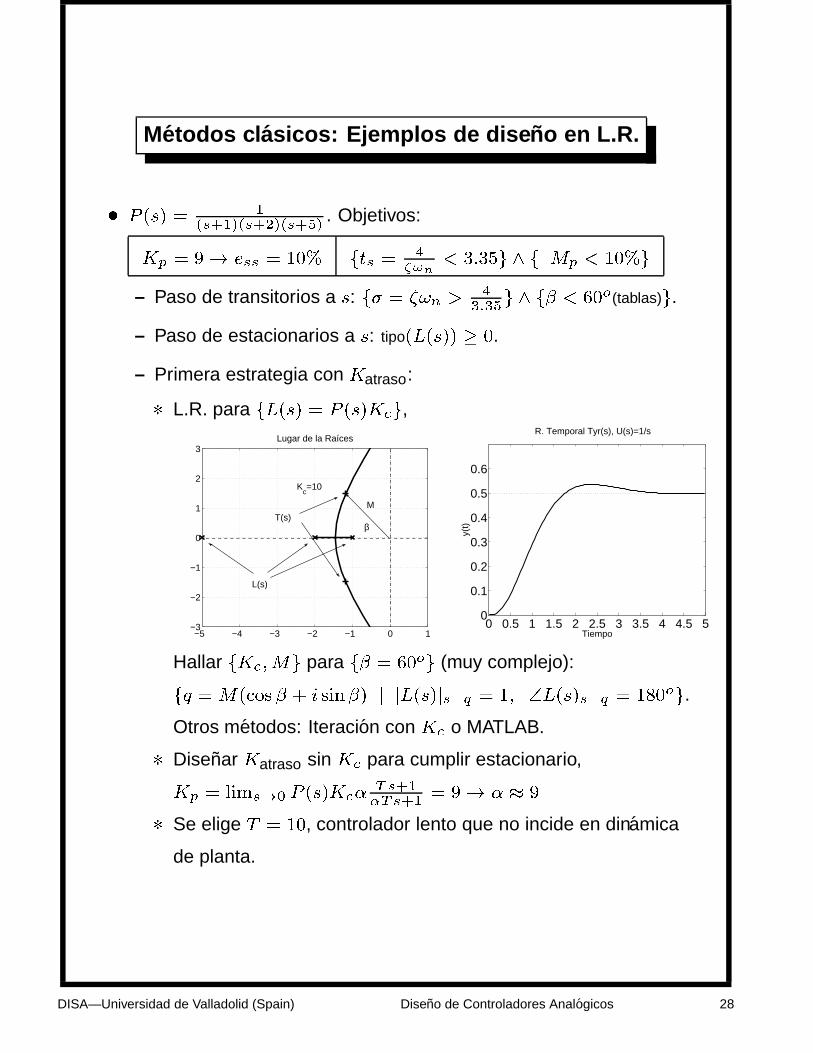
� � � � � ���������
. Objetivos:
� � para �� � � �
. �� � �� � � $ �sg�.
– Paso transitorio a : � � � � � # ����.
– Paso estacionario a : tipo��� �� � �.
– Primera estrategia: L.R. de �� � � � � ����,
−3 −2.5 −2 −1.5 −1 −0.5 0−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Lugar de las raíces
Eje
Imag
.
Eje Real
L(s)
T(s) Hallar ��:
��� ������ � �
�� � ���
Cumple transitorio. Anadir PI lento para estacionario.
PI� � � ���� � �
��
�
−3 −2.5 −2 −1.5 −1 −0.5 0−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Lugar de las raíces
Eje
Imag
.
Eje Real
L(s)
T(s)
0 50 100 150 200 250 3000
0.2
0.4
0.6
0.8
1Respuesta temporal
Salida
Tie
mpo
El PI hace muy lenta la dinamica del sistema.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 26
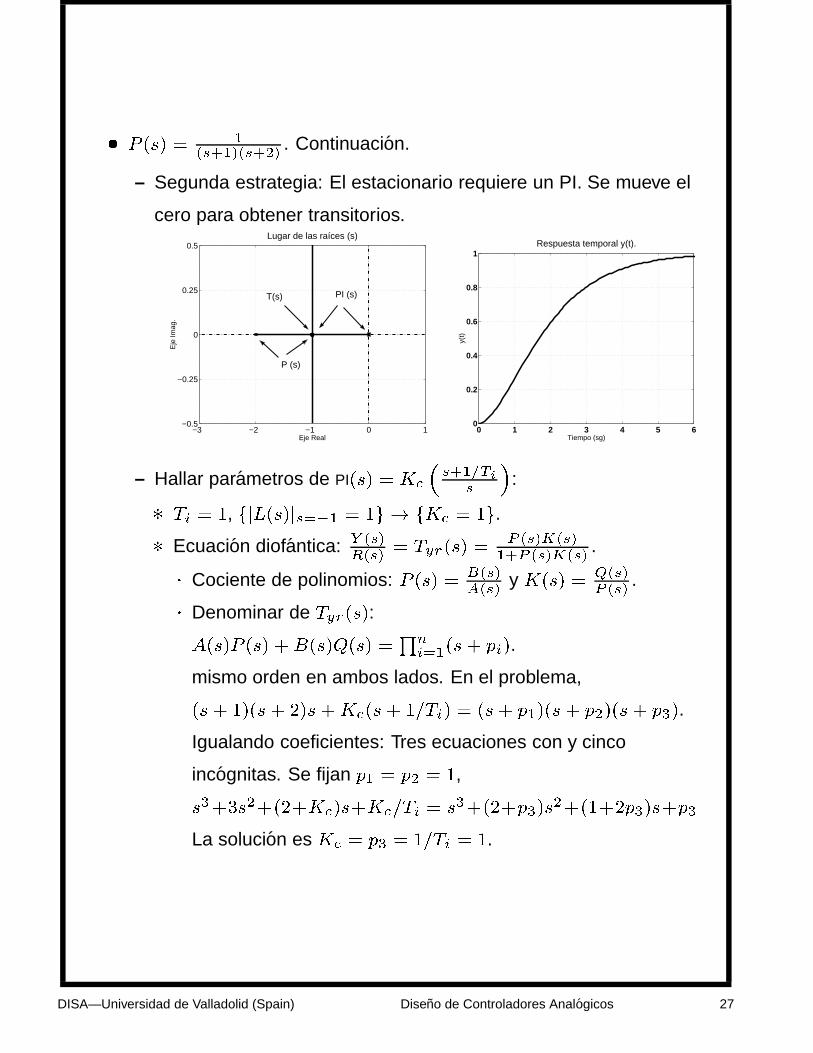
� � � � � ���������
. Continuacion.
– Segunda estrategia: El estacionario requiere un PI. Se mueve el
cero para obtener transitorios.
−3 −2 −1 0 1−0.5
−0.25
0
0.25
0.5Lugar de las raíces (s)
Eje
Imag
.
Eje Real
PI (s)
P (s)
T(s)
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1Respuesta temporal y(t).
Tiempo (sg)
y(t)
– Hallar parametros de PI� � � ��������
�:
� �� � �, ��� ���� � �� � �� � ��.
� Ecuacion diofantica: � �����
� ��� � �� �����
��� �����.
� Cociente de polinomios: � � � � &��'��
y �� � � (��� ��
.
� Denominar de ��� �:
'� �� � � �(� �)� � ������ � ���.
mismo orden en ambos lados. En el problema,
� � ��� � �� ���� � ����� � � � ���� � ���� � ���.
Igualando coeficientes: Tres ecuaciones con y cinco
incognitas. Se fijan �� � �� � �,
��� �������� ������ � �������� ��������� ���
La solucion es �� � �� � ���� � �.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 27
Metodos cl asicos: Ejemplos de dise no en L.R.
� � � � � �������������
. Objetivos:
�� � �� � � �� � � ����
$ ����� � �� $ ���
– Paso de transitorios a : � � ��� #�
����� � � $ ��(tablas)�.
– Paso de estacionarios a : tipo��� �� � .
– Primera estrategia con �atraso:
� L.R. para �� � � � � ����,
−5 −4 −3 −2 −1 0 1−3
−2
−1
0
1
2
3Lugar de la Raíces
Kc=10
L(s)
T(s) β
M
R. Temporal Tyr(s), U(s)=1/s
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.1
0.2
0.3
0.4
0.5
0.6
Tiempo
y(t)
Hallar ���� para � � ��� (muy complejo):
% ������ � � � ����� � ��� ��� � � ��� �� � ����.
Otros metodos: Iteracion con �� o MATLAB.
� Disenar �atraso sin �� para cumplir estacionario,
�� � �� �� � � �������%���
� �� � �
� Se elige � � �, controlador lento que no incide en dinamica
de planta.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 28
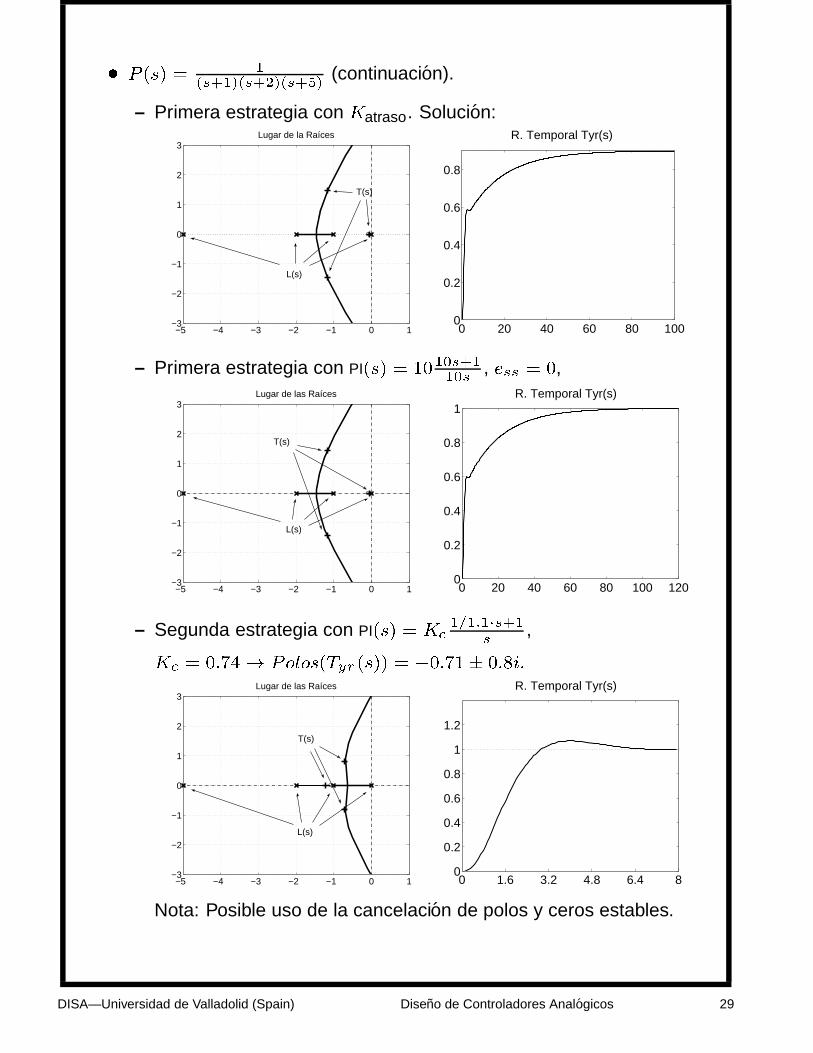
� � � � � �������������
(continuacion).
– Primera estrategia con �atraso. Solucion:
−5 −4 −3 −2 −1 0 1−3
−2
−1
0
1
2
3Lugar de la Raíces
L(s)
T(s)
R. Temporal Tyr(s)
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
– Primera estrategia con PI� � � �������
, � � ,
−5 −4 −3 −2 −1 0 1−3
−2
−1
0
1
2
3Lugar de las Raíces
L(s)
T(s)
R. Temporal Tyr(s)
0 20 40 60 80 100 1200
0.2
0.4
0.6
0.8
1
– Segunda estrategia con PI� � � ����������
,
�� � �#�� �+�+ ���� �� � ��#�� ����
−5 −4 −3 −2 −1 0 1−3
−2
−1
0
1
2
3Lugar de las Raíces
L(s)
T(s)
R. Temporal Tyr(s)
0 1.6 3.2 4.8 6.4 80
0.2
0.4
0.6
0.8
1
1.2
Nota: Posible uso de la cancelacion de polos y ceros estables.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 29
Metodos cl asicos: Ejemplos de dise no en L.R.
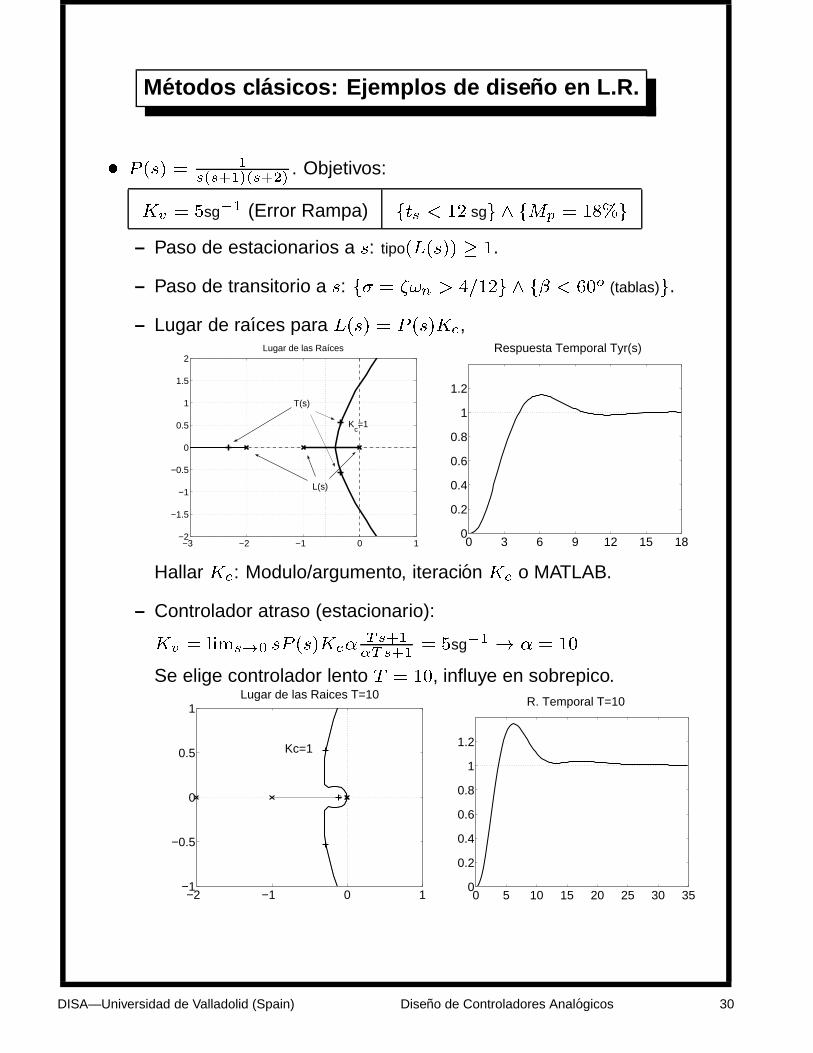
� � � � � ���������
. Objetivos:
�! � �sg�� (Error Rampa) � $ �� sg� � �� � ����
– Paso de estacionarios a : tipo��� �� � �.
– Paso de transitorio a : � � ��� # ����� � � $ �� (tablas)�.
– Lugar de raıces para �� � � � � ���,
−3 −2 −1 0 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Lugar de las Raíces
Kc=1
L(s)
T(s)
Respuesta Temporal Tyr(s)
0 3 6 9 12 15 180
0.2
0.4
0.6
0.8
1
1.2
Hallar ��: Modulo/argumento, iteracion �� o MATLAB.
– Controlador atraso (estacionario):
�! � �� �� � � �������%���
� �sg�� � � � �
Se elige controlador lento � � �, influye en sobrepico.
−2 −1 0 1−1
−0.5
0
0.5
1Lugar de las Raices T=10
Kc=1
R. Temporal T=10
0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
1.2
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 30
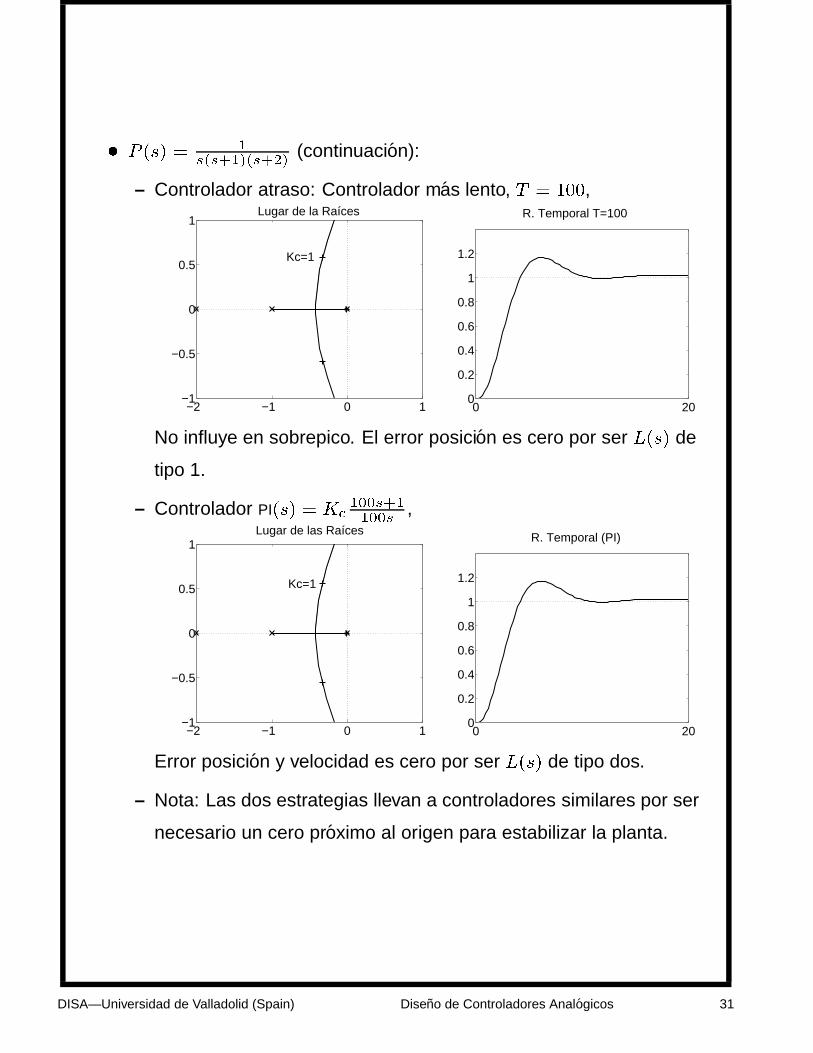
� � � � � ���������
(continuacion):
– Controlador atraso: Controlador mas lento, � � �,
−2 −1 0 1−1
−0.5
0
0.5
1Lugar de la Raíces
Kc=1
R. Temporal T=100
0 200
0.2
0.4
0.6
0.8
1
1.2
No influye en sobrepico. El error posicion es cero por ser �� � de
tipo 1.
– Controlador PI� � � ����������
,
−2 −1 0 1−1
−0.5
0
0.5
1Lugar de las Raíces
Kc=1
R. Temporal (PI)
0 200
0.2
0.4
0.6
0.8
1
1.2
Error posicion y velocidad es cero por ser �� � de tipo dos.
– Nota: Las dos estrategias llevan a controladores similares por ser
necesario un cero proximo al origen para estabilizar la planta.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 31
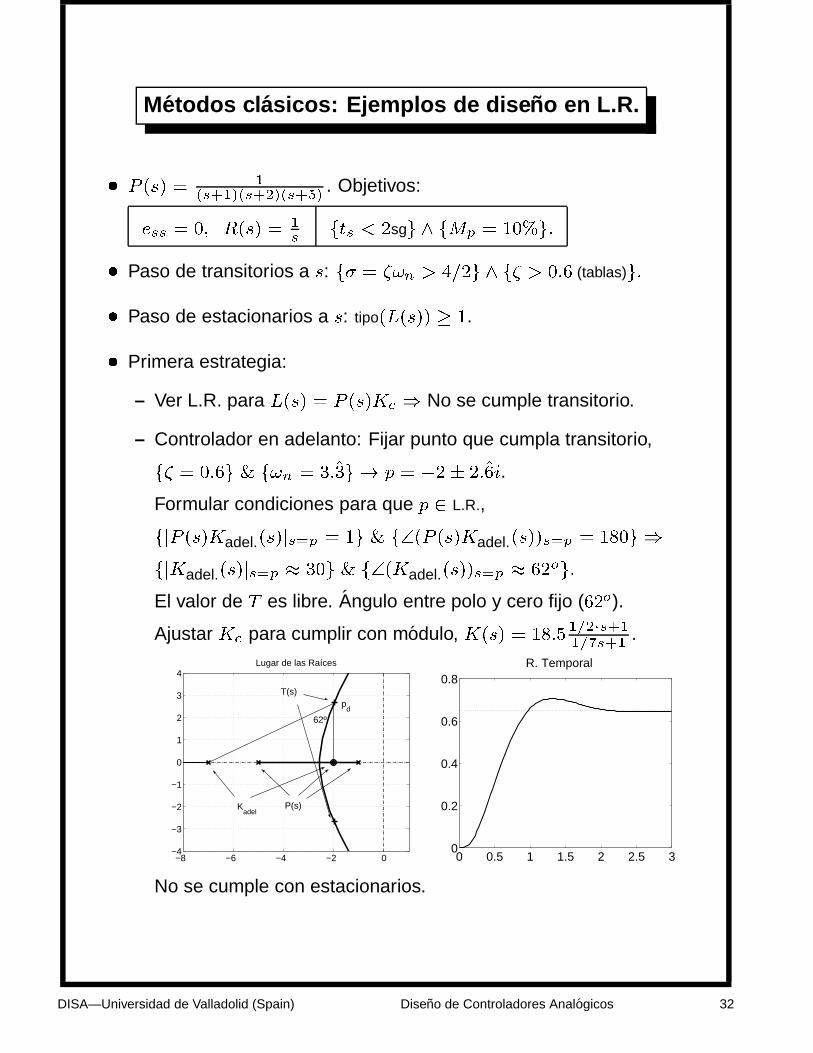
Metodos cl asicos: Ejemplos de dise no en L.R.
� � � � � �������������
. Objetivos:
� � �� � � �
� $ �sg� � �� � ����
� Paso de transitorios a : � � ��� # ���� � � # �� (tablas)��
� Paso de estacionarios a : tipo��� �� � �.
� Primera estrategia:
– Ver L.R. para �� � � � � ��� � No se cumple transitorio.
– Controlador en adelanto: Fijar punto que cumpla transitorio,
� � ��� $ �� � ����� � � � ��� �����.
Formular condiciones para que � � L.R.,
�� � ��adel.� ��� � �� $ ��� � ��adel.� ��� � ��� �
��adel.� ��� �� $ ���adel.� ��� �����
El valor de � es libre. Angulo entre polo y cero fijo (���).
Ajustar �� para cumplir con modulo, �� � � ���������������
.
−8 −6 −4 −2 0−4
−3
−2
−1
0
1
2
3
4Lugar de las Raíces
62º
pd
P(s) Kadel
T(s)
R. Temporal
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
No se cumple con estacionarios.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 32
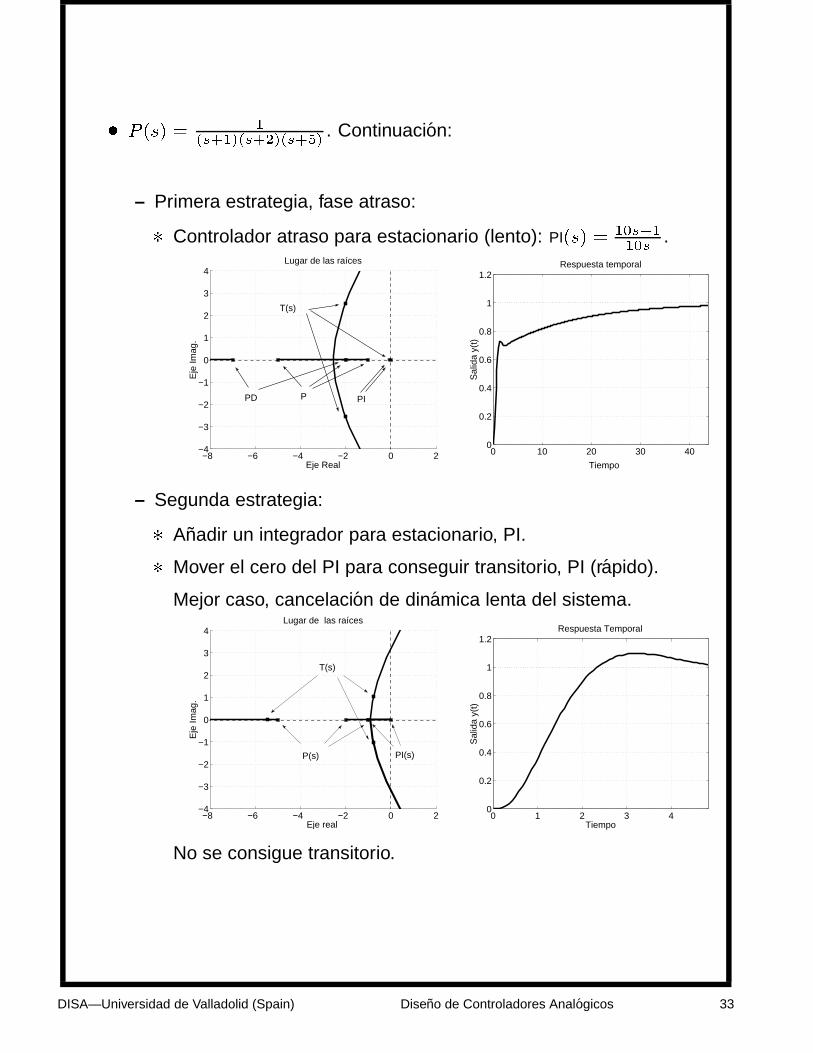
� � � � � �������������
. Continuacion:
– Primera estrategia, fase atraso:
� Controlador atraso para estacionario (lento): PI� � � ������
.
−8 −6 −4 −2 0 2−4
−3
−2
−1
0
1
2
3
4
Eje Real
Eje
Imag
.
Lugar de las raíces
PD P PI
T(s)
0 10 20 30 400
0.2
0.4
0.6
0.8
1
1.2Respuesta temporal
TiempoS
alid
a y(
t)
– Segunda estrategia:
� Anadir un integrador para estacionario, PI.
� Mover el cero del PI para conseguir transitorio, PI (rapido).
Mejor caso, cancelacion de dinamica lenta del sistema.
−8 −6 −4 −2 0 2−4
−3
−2
−1
0
1
2
3
4
Eje real
Eje
Imag
.
Lugar de las raíces
P(s) PI(s)
T(s)
0 1 2 3 40
0.2
0.4
0.6
0.8
1
1.2Respuesta Temporal
Sal
ida
y(t)
Tiempo
No se consigue transitorio.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 33
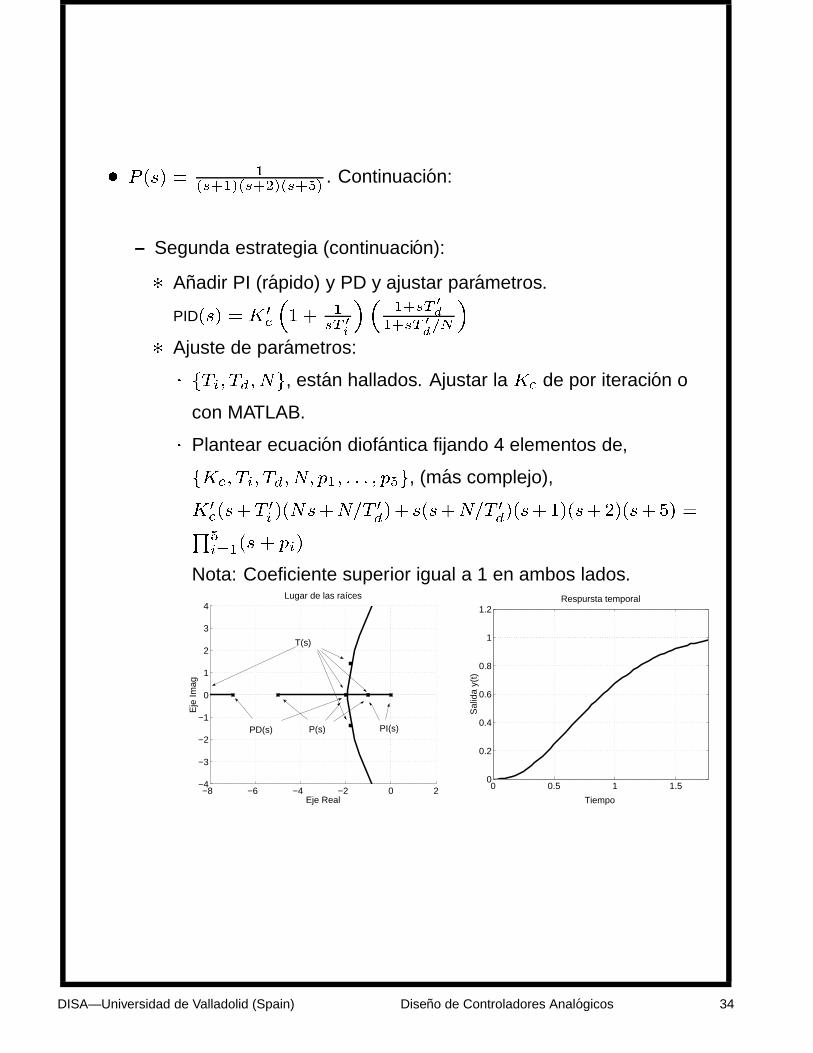
� � � � � �������������
. Continuacion:
– Segunda estrategia (continuacion):
� Anadir PI (rapido) y PD y ajustar parametros.
PID� � � ���
�� � �
� ��
����� ��
��� ����
�� Ajuste de parametros:
� �� �� "�, estan hallados. Ajustar la �� de por iteracion o
con MATLAB.
� Plantear ecuacion diofantica fijando 4 elementos de,
�� �� �� " �� � � � ���, (mas complejo),
���� ��
�� ��" �"��
���� � �"��
���� ���� ���� ��� ���
��� � ���
Nota: Coeficiente superior igual a 1 en ambos lados.
−8 −6 −4 −2 0 2−4
−3
−2
−1
0
1
2
3
4
Eje Real
Eje
Imag
Lugar de las raíces
P(s) PD(s) PI(s)
T(s)
0 0.5 1 1.50
0.2
0.4
0.6
0.8
1
1.2Respursta temporal
Tiempo
Sal
ida
y(t)
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 34
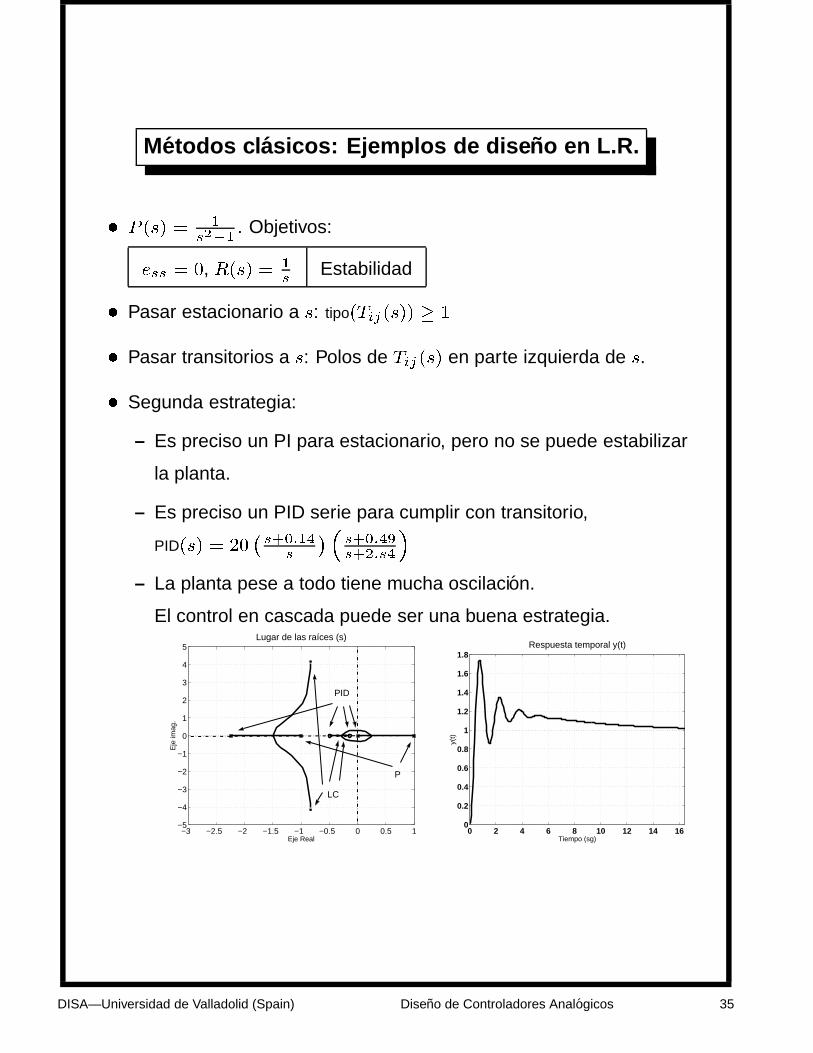
Metodos cl asicos: Ejemplos de dise no en L.R.
� � � � � ���� . Objetivos:
� � , �� � � �
Estabilidad
� Pasar estacionario a : tipo����� �� � �
� Pasar transitorios a : Polos de ���� � en parte izquierda de .
� Segunda estrategia:
– Es preciso un PI para estacionario, pero no se puede estabilizar
la planta.
– Es preciso un PID serie para cumplir con transitorio,
PID� � � �������
� ����� ����
�
– La planta pese a todo tiene mucha oscilacion.
El control en cascada puede ser una buena estrategia.
−3 −2.5 −2 −1.5 −1 −0.5 0 0.5 1−5
−4
−3
−2
−1
0
1
2
3
4
5
Eje Real
Eje
imag
.
Lugar de las raíces (s)
P
PID
LC
0 2 4 6 8 10 12 14 160
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Respuesta temporal y(t)
Tiempo (sg)
y(t)
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 35
Metodos cl asicos: Ejemplos de dise no en L.R.
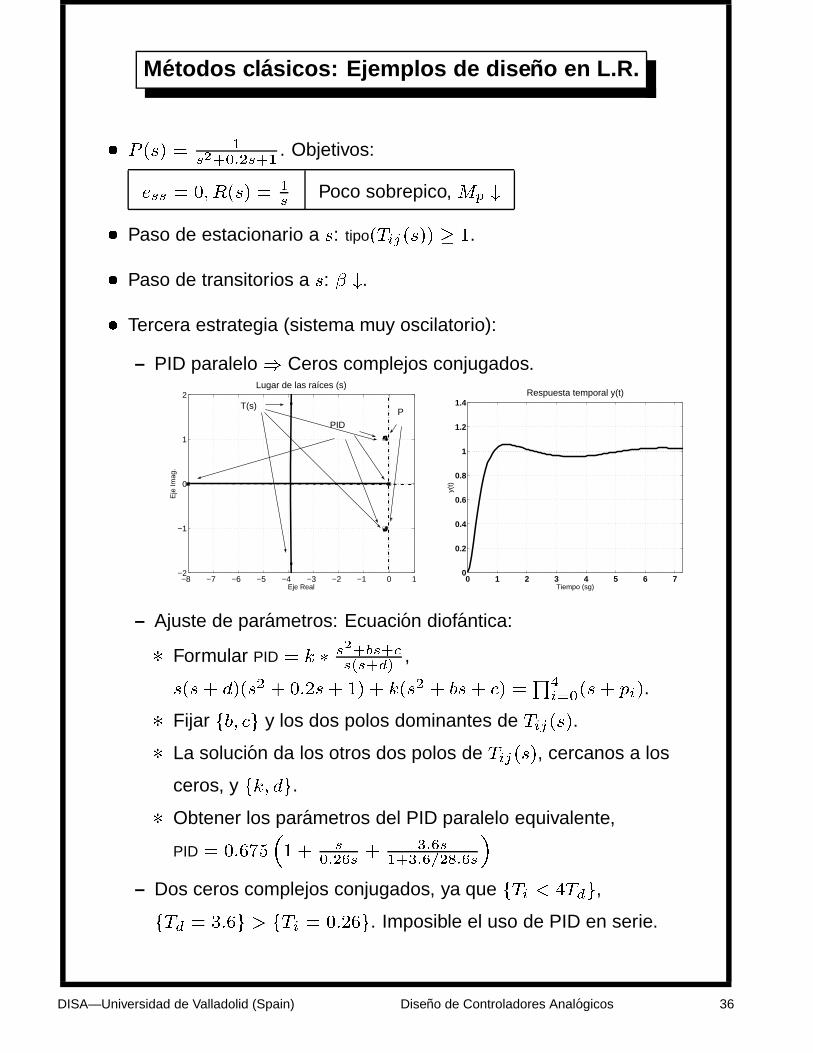
� � � � � ��������
. Objetivos:
� � �� � � �
Poco sobrepico, �� �
� Paso de estacionario a : tipo����� �� � �.
� Paso de transitorios a : � �.
� Tercera estrategia (sistema muy oscilatorio):
– PID paralelo � Ceros complejos conjugados.
−8 −7 −6 −5 −4 −3 −2 −1 0 1−2
−1
0
1
2Lugar de las raíces (s)
Eje
Imag
.
Eje Real
P PID
T(s)
0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
1.2
1.4Respuesta temporal y(t)
Tiempo (sg)
y(t)
– Ajuste de parametros: Ecuacion diofantica:
� Formular PID � � � �� ������
,
� � ��� � � �� � �� � �� � � � � !� ������ � ���.
� Fijar � !� y los dos polos dominantes de ���� �.
� La solucion da los otros dos polos de ���� �, cercanos a los
ceros, y � ��.
� Obtener los parametros del PID paralelo equivalente,
PID � ��#��� �
����� ���
����������
�
– Dos ceros complejos conjugados, ya que �� $ ����,
�� � ���� # �� � ����. Imposible el uso de PID en serie.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 36
Metodos cl asicos: Sintonizaci on en frecuencia.
� Criterio de estabilidad de Nyquist:
, � " � � �
�������
, : Polos inestables lazo cerrado.
" : Vueltas alrededor de -1, sentido horario.
� : Polos inestables en lazo abierto.
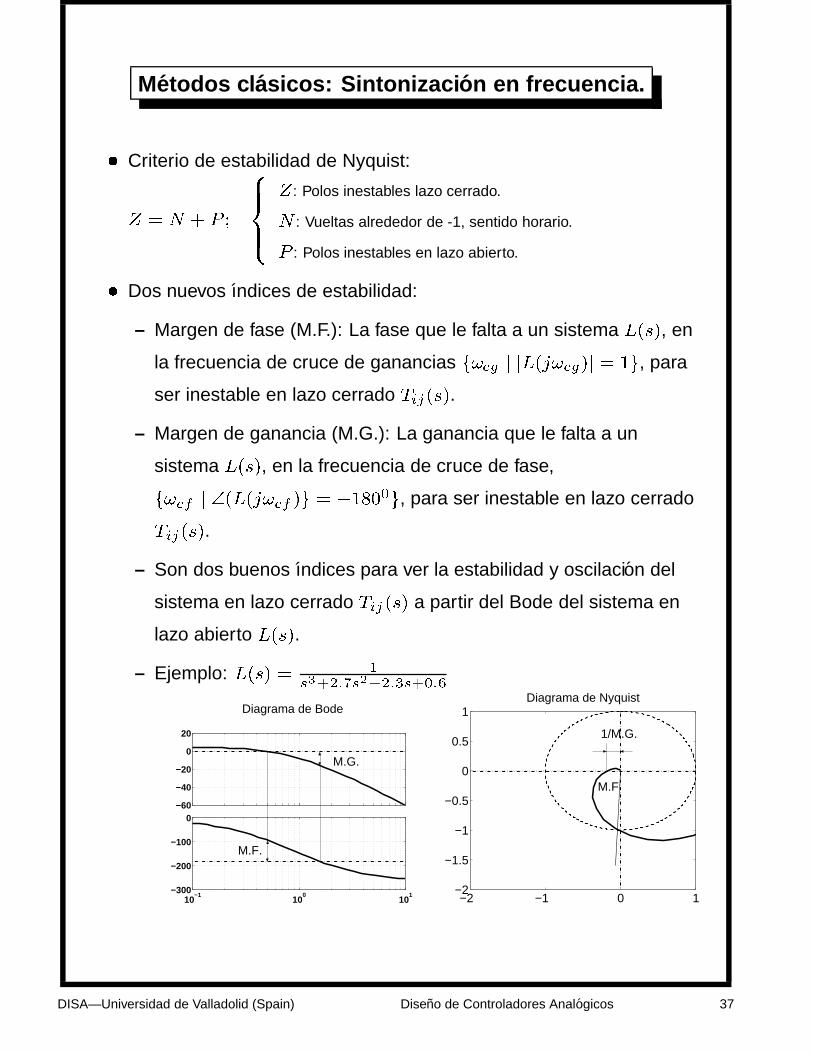
� Dos nuevos ındices de estabilidad:
– Margen de fase (M.F.): La fase que le falta a un sistema �� �, en
la frecuencia de cruce de ganancias ��) � ���-��)�� � ��, para
ser inestable en lazo cerrado ���� �.
– Margen de ganancia (M.G.): La ganancia que le falta a un
sistema �� �, en la frecuencia de cruce de fase,
��� � ����-��� �� � �����, para ser inestable en lazo cerrado
���� �.
– Son dos buenos ındices para ver la estabilidad y oscilacion del
sistema en lazo cerrado ���� � a partir del Bode del sistema en
lazo abierto �� �.
– Ejemplo: �� � � ���������������
Diagrama de Bode
−60
−40
−20
0
20
10−1
100
101
−300
−200
−100
0
M.G.
M.F.
−2 −1 0 1−2
−1.5
−1
−0.5
0
0.5
1Diagrama de Nyquist
M.F
1/M.G.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 37
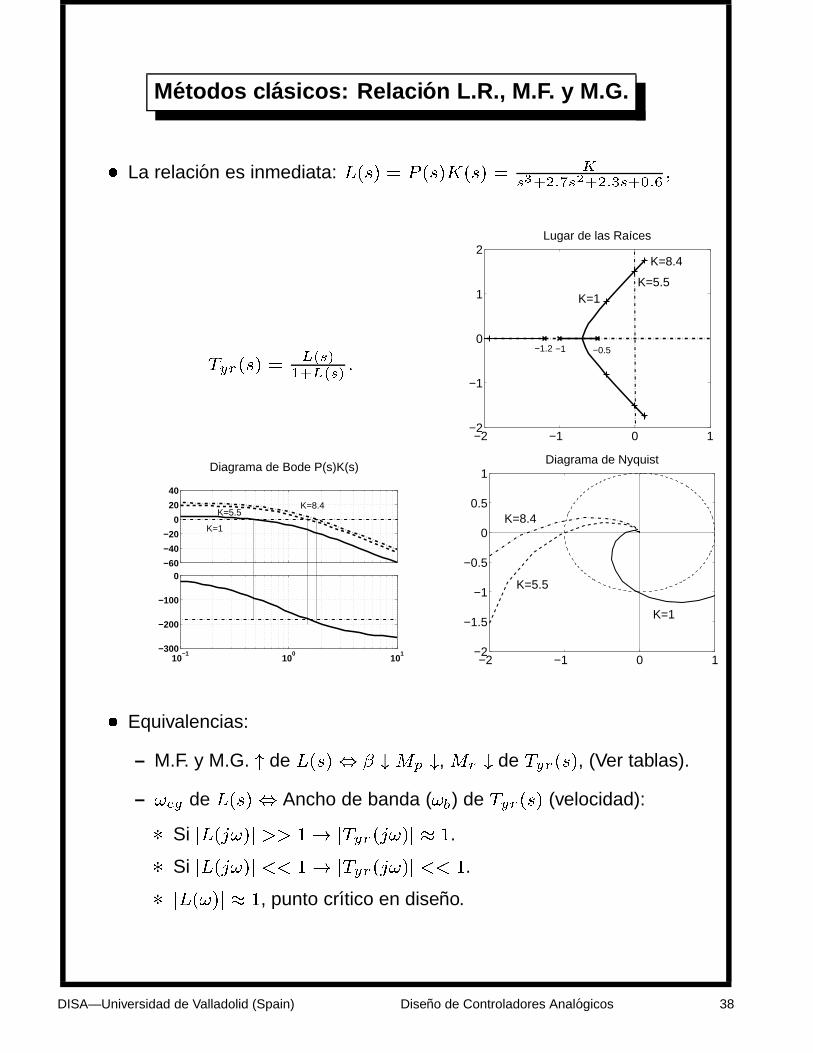
Metodos cl asicos: Relaci on L.R., M.F. y M.G.
� La relacion es inmediata: �� � � � � ��� � � ���������������
��� � � ��
�� ���
−2 −1 0 1−2
−1
0
1
2Lugar de las Raíces
K=1 K=5.5
K=8.4
−0.5 −1 −1.2
Diagrama de Bode P(s)K(s)
−60
−40
−20
0
20
40
10−1
100
101
−300
−200
−100
0
K=1
K=5.5 K=8.4
−2 −1 0 1−2
−1.5
−1
−0.5
0
0.5
1Diagrama de Nyquist
K=1
K=5.5
K=8.4
� Equivalencias:
– M.F. y M.G. � de �� �� � ��� �, �� � de ��� �, (Ver tablas).
– ��) de �� �� Ancho de banda (� ) de ��� � (velocidad):
� Si ���-��� ## �� ����-��� �.
� Si ���-��� $$ �� ����-��� $$ �.
� ������ �, punto crıtico en diseno.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 38
Metodos cl asicos: Objetivos en frecuencia.
� Objetivos estacionarios:
– Eliminar error estacionario a una entrada tipo �.
– Incrementar tipo��� ��, o la ganancia de �� � en � .
– Anadir PIs (atraso) o aumentar la �� de controlador.
– Problema: Reduce el M.F. y M.G. de �� �� Inestabiliza ���� �.
� Objetivos transitorios:
– Dar estabilidad a ���� � y velocidad.
– Incrementar el M.F., M.G. y ��) de �� �.
– Anadir PDs (adelanto): Aumentan la ��) sin decrementar el M.F.
y M.G.
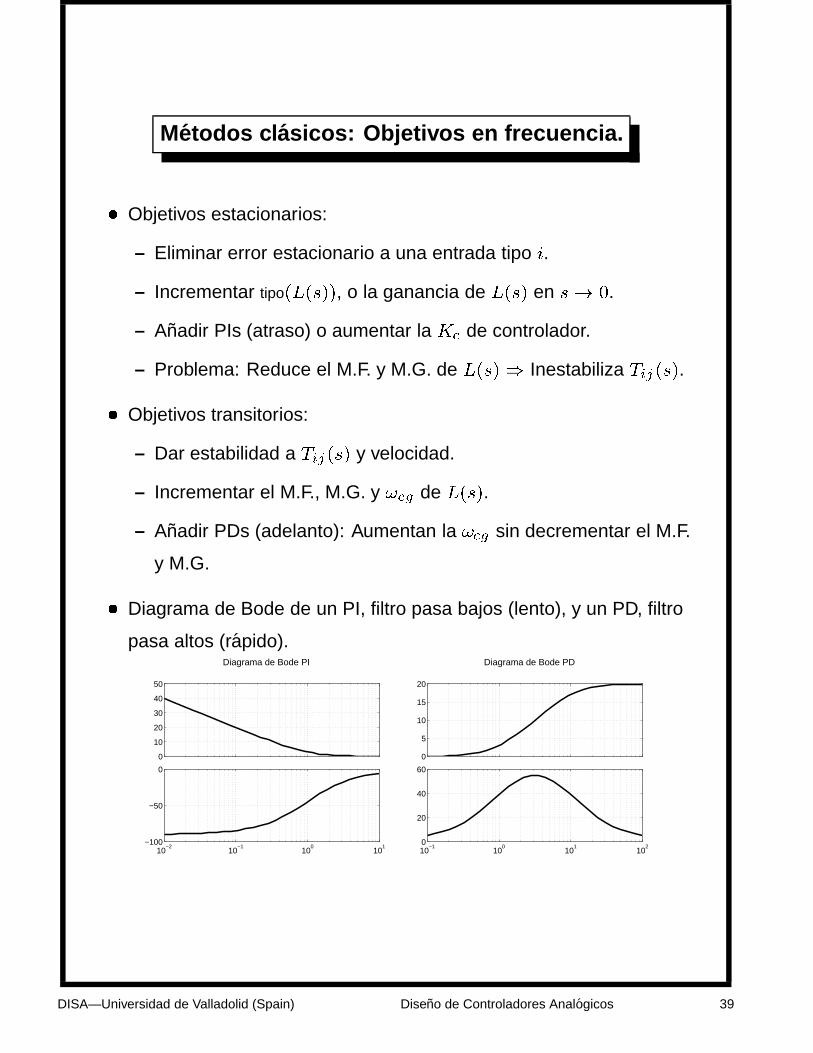
� Diagrama de Bode de un PI, filtro pasa bajos (lento), y un PD, filtro
pasa altos (rapido).Diagrama de Bode PI
0
10
20
30
40
50
10−2
10−1
100
101
−100
−50
0
Diagrama de Bode PD
0
5
10
15
20
10−1
100
101
102
0
20
40
60
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 39
Metodos cl asicos: Estrategias de dise no en frecuencia.
� Pasos previos:
– Pasar transitorios a � � M.F. y ��) .
– Pasar estacionario al tipo��� �� requerido.
� Primera estrategia (grafica e intuitiva). Para PID serie:
PID� � � ���
�� � �
� ��
����� ��
��� ����
�.
– Anadir, si se necesita, PI para obtener estacionario.
– Ajustar � �� (en la dinamica lenta � � �) y ��� � ��) y M.F.
– No se puede: Introducir PD (cero proximo a ��)) y repetir.
� Segunda estrategia. Para atraso/adelanto:
�� � � �� ��atr��*�atr��
�ade��%�ade��
– Ajustar ganancia �� para conseguir estacionario.
� Atraso: Bajar con �atr� � la ��) para conseguir el M.F.
� Adelanto: Incrementar el M.F. con un �ade� � a la misma ��) o
superior.
� Atraso-Adelanto: Mantener la misma ��) y aumentar M.F.,
� � ���. Similar a la estrategia de adelanto pero con apoyo
del compensador de atraso para evitar que ��) aumente.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 40
Metodos cl asicos: Ejemplos de control en frecuencia.
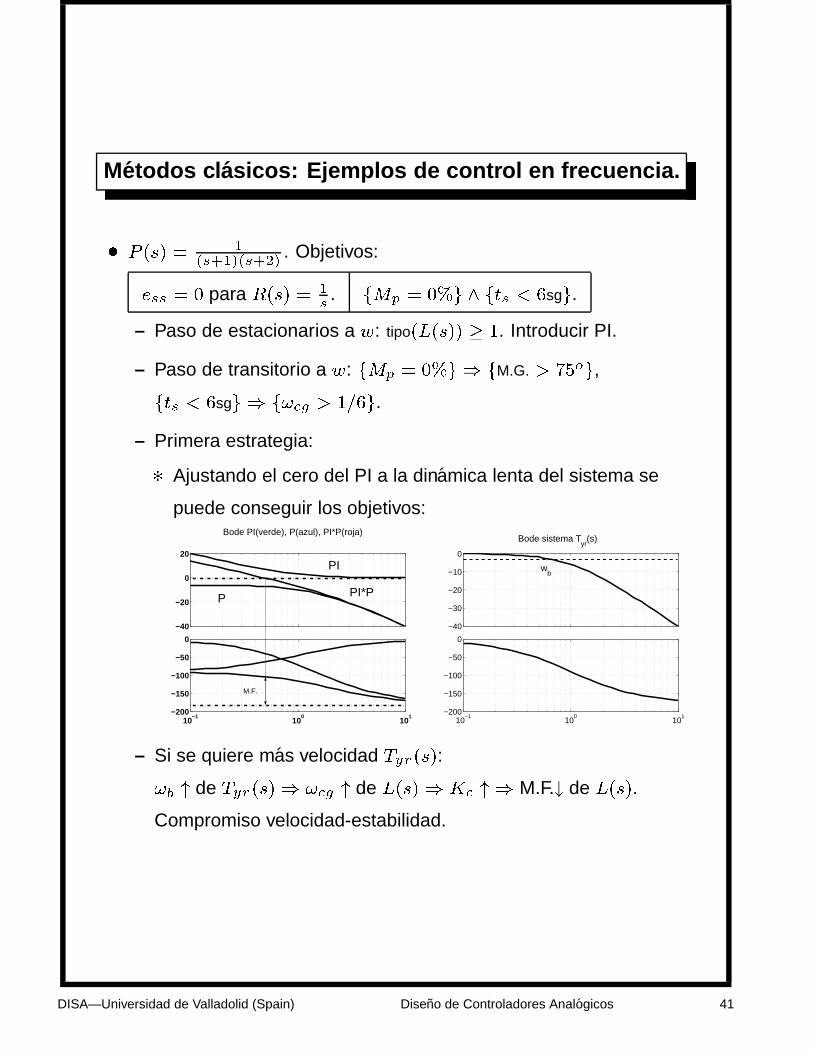
� � � � � ���������
. Objetivos:
� � para �� � � �
. �� � �� � � $ �sg�.
– Paso de estacionarios a .: tipo��� �� � �. Introducir PI.
– Paso de transitorio a .: �� � �� � M.G. # #���,
� $ �sg� � ��) # ����.
– Primera estrategia:
� Ajustando el cero del PI a la dinamica lenta del sistema se
puede conseguir los objetivos:Bode PI(verde), P(azul), PI*P(roja)
−40
−20
0
20
10−1
100
101
−200
−150
−100
−50
0
M.F.
PI
P PI*P
Bode sistema Tyr
(s)
−40
−30
−20
−10
0
10−1
100
101
−200
−150
−100
−50
0
wb
– Si se quiere mas velocidad ��� �:
� � de ��� �� ��) � de �� �� �� � � M.F.� de �� �.
Compromiso velocidad-estabilidad.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 41
Metodos cl asicos: Ejemplos de control en frecuencia.
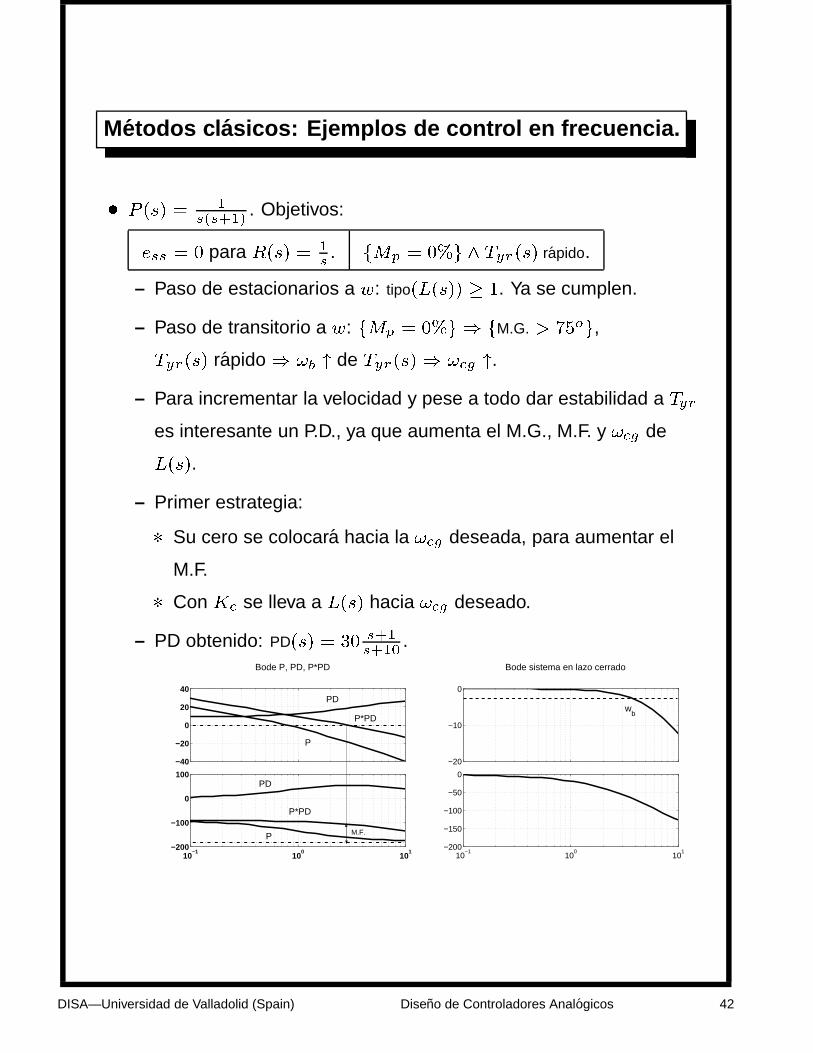
� � � � � �����
. Objetivos:
� � para �� � � �
. �� � �� � ��� � rapido.
– Paso de estacionarios a .: tipo��� �� � �. Ya se cumplen.
– Paso de transitorio a .: �� � �� � M.G. # #���,
��� � rapido � � � de ��� �� ��) �.
– Para incrementar la velocidad y pese a todo dar estabilidad a ��
es interesante un P.D., ya que aumenta el M.G., M.F. y ��) de
�� �.
– Primer estrategia:
� Su cero se colocara hacia la ��) deseada, para aumentar el
M.F.
� Con �� se lleva a �� � hacia ��) deseado.
– PD obtenido: PD� � � � �����
.Bode P, PD, P*PD
−40
−20
0
20
40
10−1
100
101
−200
−100
0
100
M.F.
P
PD
P*PD
PD
P*PD
P
Bode sistema en lazo cerrado
−20
−10
0
10−1
100
101
−200
−150
−100
−50
0
wb
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 42
Metodos cl asicos: Ejemplos de control en frecuencia.
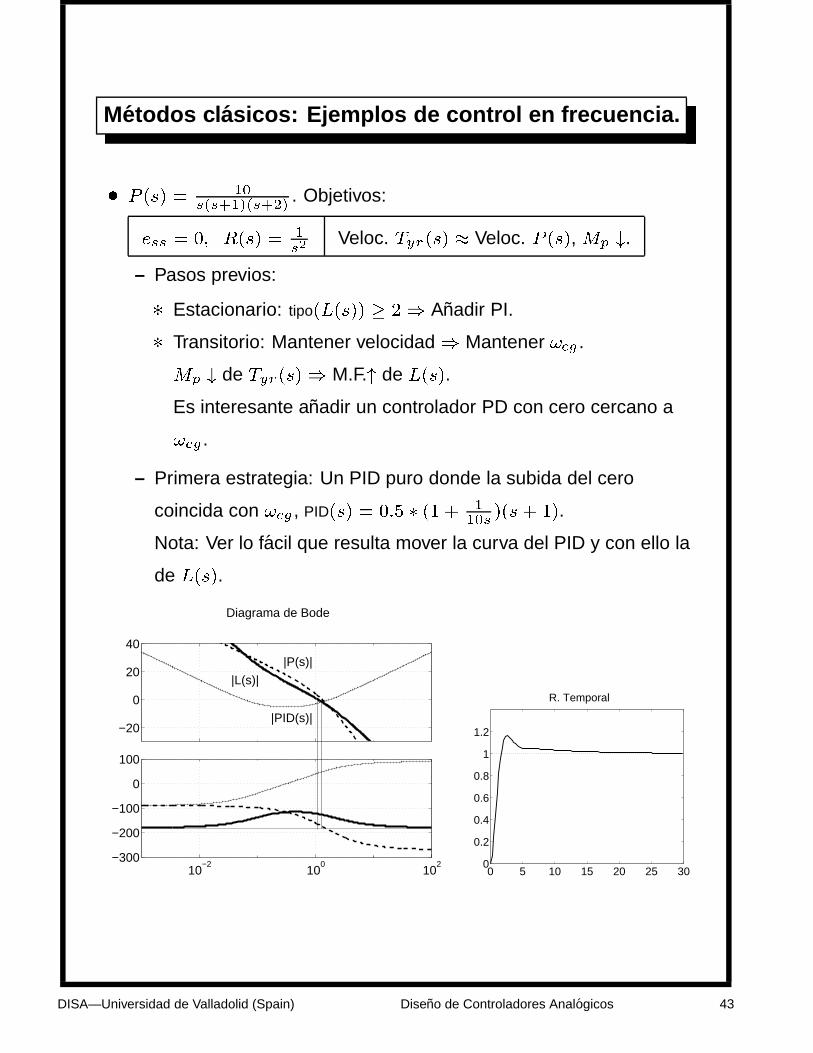
� � � � � ����������
. Objetivos:
� � �� � � ��
Veloc. ��� � Veloc. � � �, �� �.
– Pasos previos:
� Estacionario: tipo��� �� � �� Anadir PI.
� Transitorio: Mantener velocidad � Mantener ��) .
�� � de ��� �� M.F.� de �� �.
Es interesante anadir un controlador PD con cero cercano a
��) .
– Primera estrategia: Un PID puro donde la subida del cero
coincida con ��) , PID� � � �� � �� � ���
�� � ��.
Nota: Ver lo facil que resulta mover la curva del PID y con ello la
de �� �.
Diagrama de Bode
−20
0
20
40
10−2
100
102
−300
−200
−100
0
100
|P(s)|
|L(s)|
|PID(s)|
R. Temporal
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 43
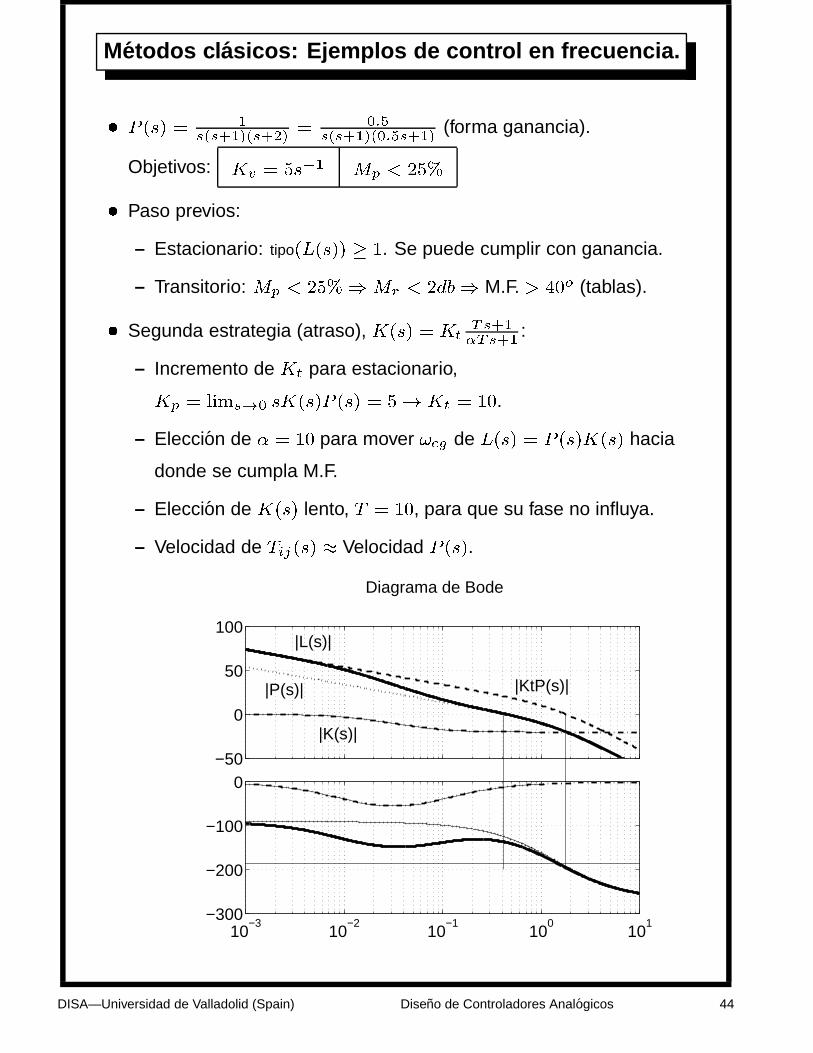
Metodos cl asicos: Ejemplos de control en frecuencia.
� � � � � ���������
� ��������������
(forma ganancia).
Objetivos: �! � � �� �� $ ���
� Paso previos:
– Estacionario: tipo��� �� � �. Se puede cumplir con ganancia.
– Transitorio: �� $ ������ $ ���� M.F. # �� (tablas).
� Segunda estrategia (atraso), �� � � �����%���
:
– Incremento de �� para estacionario,
�� � �� �� �� �� � � � �� �� � �.
– Eleccion de � � � para mover ��) de �� � � � � ��� � hacia
donde se cumpla M.F.
– Eleccion de �� � lento, � � �, para que su fase no influya.
– Velocidad de ���� � Velocidad � � �.
Diagrama de Bode
−50
0
50
100
10−3
10−2
10−1
100
101
−300
−200
−100
0
|K(s)|
|P(s)| |KtP(s)|
|L(s)|
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 44
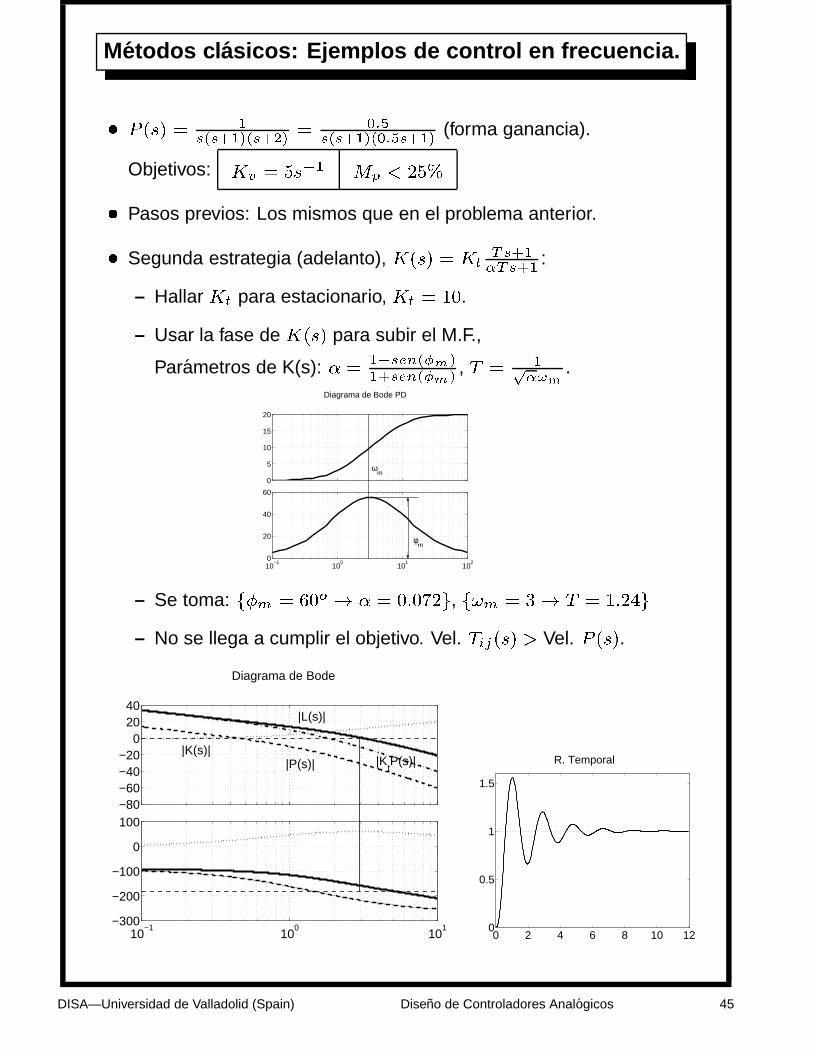
Metodos cl asicos: Ejemplos de control en frecuencia.
� � � � � ���������
� ��������������
(forma ganancia).
Objetivos: �! � � �� �� $ ���
� Pasos previos: Los mismos que en el problema anterior.
� Segunda estrategia (adelanto), �� � � �����%���
:
– Hallar �� para estacionario, �� � �.
– Usar la fase de �� � para subir el M.F.,
Parametros de K(s): � ������+�������+��
, � � ��%��
.Diagrama de Bode PD
0
5
10
15
20
10−1
100
101
102
0
20
40
60
ωm
φm
– Se toma: /� � �� � � � �#��, �� � �� � � �����
– No se llega a cumplir el objetivo. Vel. ���� � # Vel. � � �.
Diagrama de Bode
−80−60−40−20
02040
10−1
100
101
−300
−200
−100
0
100
|P(s)|
|L(s)|
|KtP(s)|
|K(s)| R. Temporal
0 2 4 6 8 10 120
0.5
1
1.5
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 45
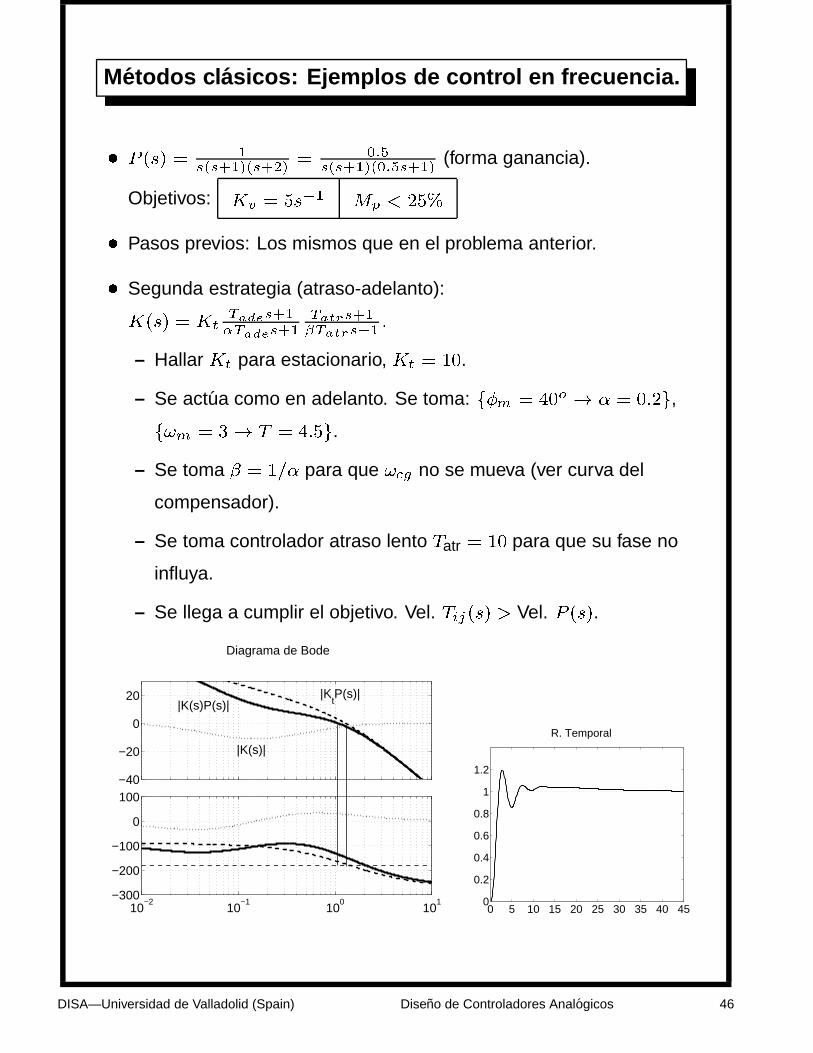
Metodos cl asicos: Ejemplos de control en frecuencia.
� � � � � ���������
� ��������������
(forma ganancia).
Objetivos: �! � � �� �� $ ���
� Pasos previos: Los mismos que en el problema anterior.
� Segunda estrategia (atraso-adelanto):
�� � � ��������%������
�� ���*�� ���
�
– Hallar �� para estacionario, �� � �.
– Se actua como en adelanto. Se toma: /� � �� � � � ���,
�� � �� � � ����.
– Se toma � � ��� para que ��) no se mueva (ver curva del
compensador).
– Se toma controlador atraso lento �atr � � para que su fase no
influya.
– Se llega a cumplir el objetivo. Vel. ���� � # Vel. � � �.
Diagrama de Bode
−40
−20
0
20
10−2
10−1
100
101
−300
−200
−100
0
100
|KtP(s)|
|K(s)P(s)|
|K(s)| R. Temporal
0 5 10 15 20 25 30 35 40 450
0.2
0.4
0.6
0.8
1
1.2
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 46
Sintonizaci on directa de PIDs.
� Son tecnicas que a partir de la identificacion de pocos parametros
de la planta y con el criterio de optimizar ındices cuadraticos
temporales, proponen los valores optimos para los parametros del
PID �� �� ���.
� El parametro " �� sera ajustado en funcion del ruido en la
senal medida y � � �� � �� por reglas heurısticas en funcion
del tipo de planta y los cambios mas frecuente en la entrada.
� Indice a optimizar: Integral del error ante una entrada escalon con o
sin ponderacion en el tiempo.
CIEC ���� ������� , CIEA �
��� ��������
CIECT��� �������� , CIEAT
��� ���������.
� A. O´Dwyer ha reunido 200 tablas de sintonizacion diferentes en
funcion del tipo de planta y del ındice que se desee optimizar.
� Las tablas de Ziegler-Nichols son las primeras y mas famosas
tablas, aunque no las mejores.
� Las plantas puede ser identificadas en el tiempo o en frecuencia,
dando lugar a dos tipos de reglas.
� Estas reglas son muy usadas en los controladores industriales por
su facil realizacion, y son la base de los PIDs autoajustables para
plantas no lineales.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 47
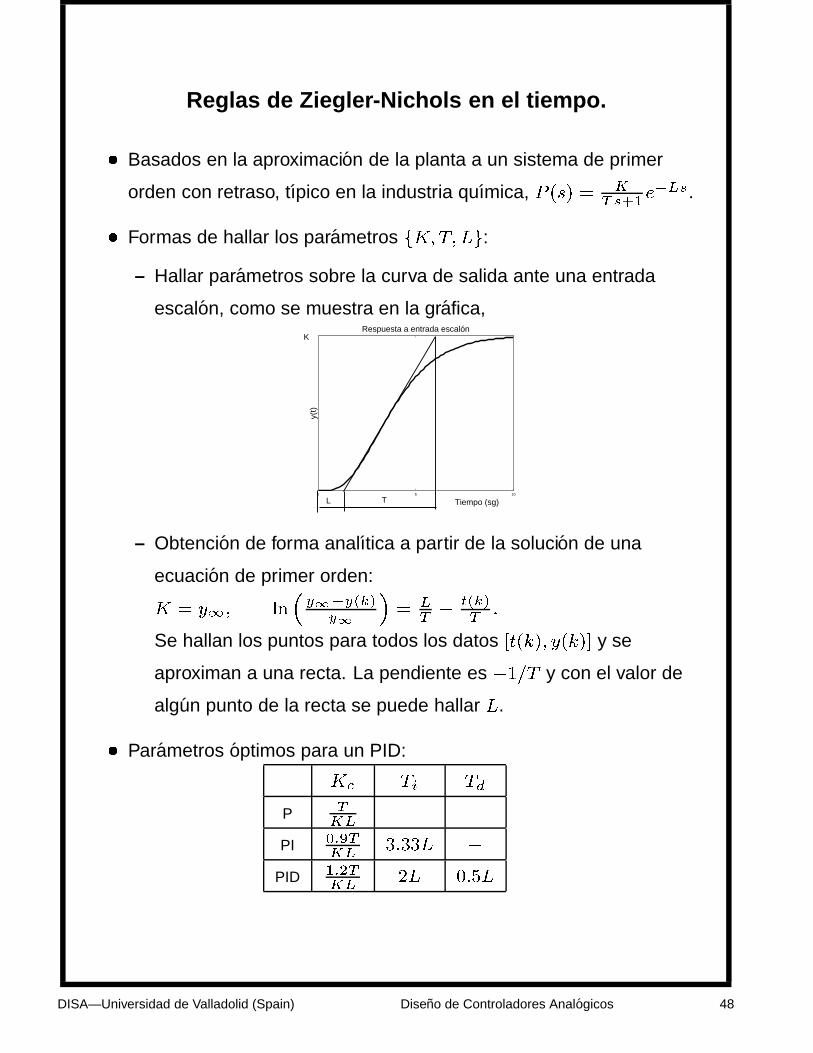
Reglas de Ziegler-Nichols en el tiempo.
� Basados en la aproximacion de la planta a un sistema de primer
orden con retraso, tıpico en la industria quımica, � � � � ����
�� .
� Formas de hallar los parametros ����:
– Hallar parametros sobre la curva de salida ante una entrada
escalon, como se muestra en la grafica,
0 5 10
Tiempo (sg)
y(t)
Respuesta a entrada escalónK
L T
– Obtencion de forma analıtica a partir de la solucion de una
ecuacion de primer orden:
� � �� ���������
�� ��������
Se hallan los puntos para todos los datos ����� ����� y se
aproximan a una recta. La pendiente es ���� y con el valor de
algun punto de la recta se puede hallar �.
� Parametros optimos para un PID:
�� �� ��
P ��
� �
PI �� ��
����� �
PID �����
�� ���
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 48
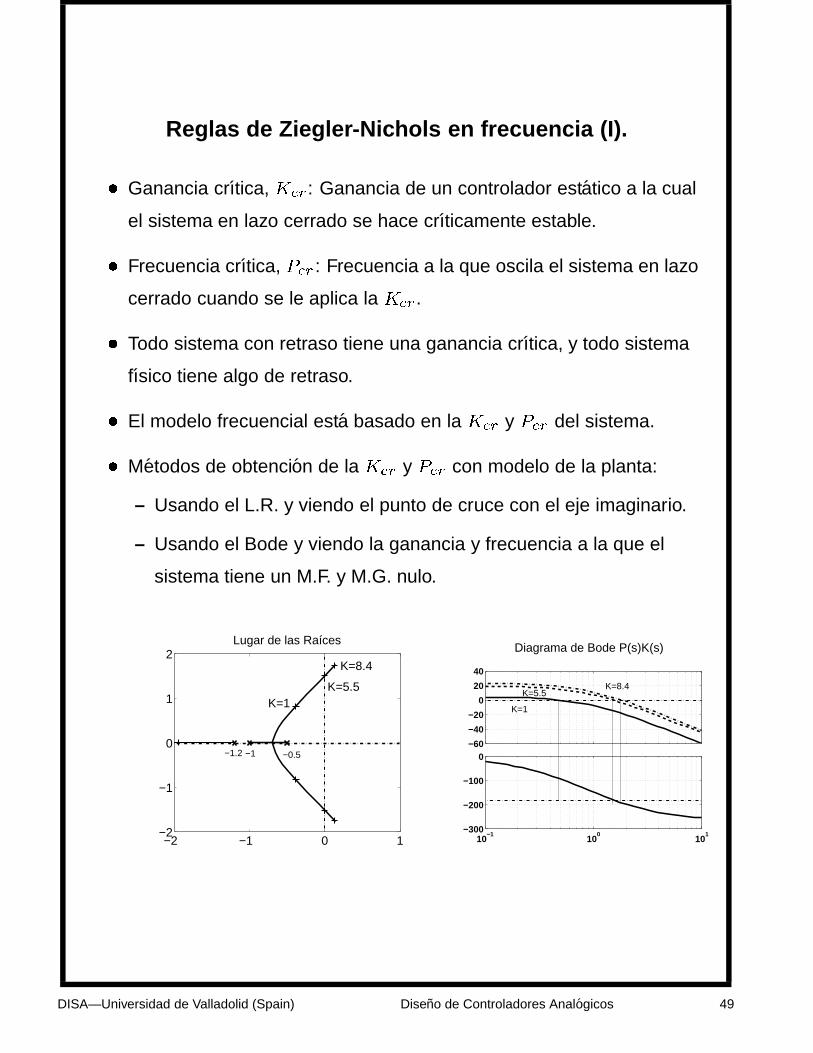
Reglas de Ziegler-Nichols en frecuencia (I).
� Ganancia crıtica, ���: Ganancia de un controlador estatico a la cual
el sistema en lazo cerrado se hace crıticamente estable.
� Frecuencia crıtica, ��� : Frecuencia a la que oscila el sistema en lazo
cerrado cuando se le aplica la ���.
� Todo sistema con retraso tiene una ganancia crıtica, y todo sistema
fısico tiene algo de retraso.
� El modelo frecuencial esta basado en la ��� y ��� del sistema.
� Metodos de obtencion de la ��� y ��� con modelo de la planta:
– Usando el L.R. y viendo el punto de cruce con el eje imaginario.
– Usando el Bode y viendo la ganancia y frecuencia a la que el
sistema tiene un M.F. y M.G. nulo.
−2 −1 0 1−2
−1
0
1
2Lugar de las Raíces
K=1 K=5.5
K=8.4
−0.5 −1 −1.2
Diagrama de Bode P(s)K(s)
−60
−40
−20
0
20
40
10−1
100
101
−300
−200
−100
0
K=1
K=5.5 K=8.4
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 49
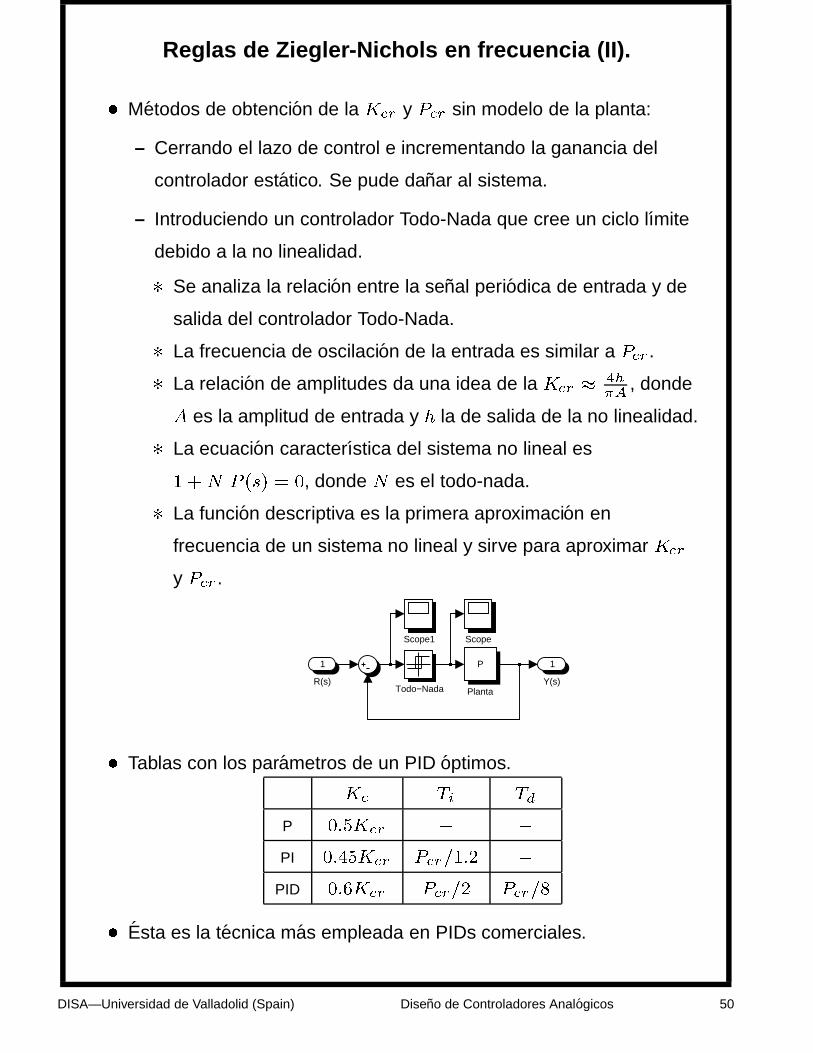
Reglas de Ziegler-Nichols en frecuencia (II).
� Metodos de obtencion de la ��� y ��� sin modelo de la planta:
– Cerrando el lazo de control e incrementando la ganancia del
controlador estatico. Se pude danar al sistema.
– Introduciendo un controlador Todo-Nada que cree un ciclo lımite
debido a la no linealidad.
� Se analiza la relacion entre la senal periodica de entrada y de
salida del controlador Todo-Nada.
� La frecuencia de oscilacion de la entrada es similar a ��� .
� La relacion de amplitudes da una idea de la ��� �,-'
, donde
' es la amplitud de entrada y 0 la de salida de la no linealidad.
� La ecuacion caracterıstica del sistema no lineal es
� �" � � � � , donde " es el todo-nada.
� La funcion descriptiva es la primera aproximacion en
frecuencia de un sistema no lineal y sirve para aproximar ���
y ��� .
1
Y(s)Todo−Nada
Scope1 Scope
P
Planta
1
R(s)
� Tablas con los parametros de un PID optimos.
�� �� ��
P ����� � �
PI ������ ������� �
PID ����� ����� �����
� Esta es la tecnica mas empleada en PIDs comerciales.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 50
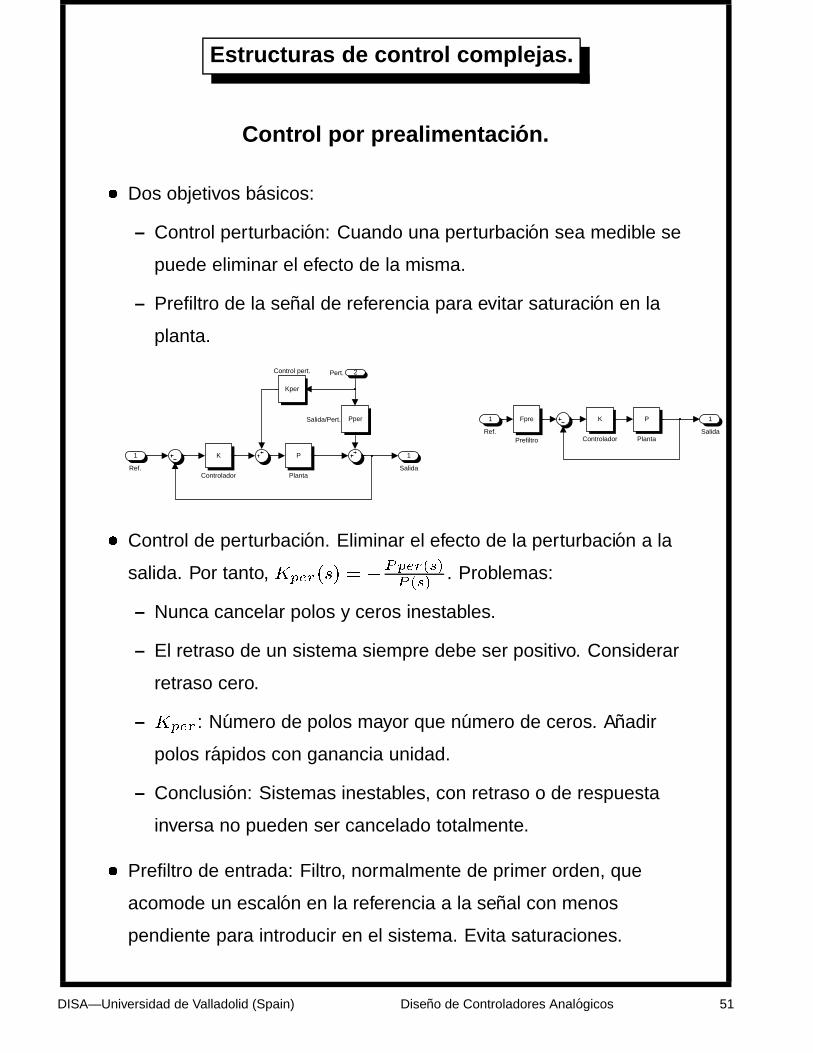
Estructuras de control complejas.
Control por prealimentaci on.
� Dos objetivos basicos:
– Control perturbacion: Cuando una perturbacion sea medible se
puede eliminar el efecto de la misma.
– Prefiltro de la senal de referencia para evitar saturacion en la
planta.
1
Salida
PperSalida/Pert.
P
Planta
K
Controlador
Kper
Control pert. 2Pert.
1
Ref.
1
Salida
Fpre
Prefiltro
P
Planta
K
Controlador
1
Ref.
� Control de perturbacion. Eliminar el efecto de la perturbacion a la
salida. Por tanto, ����� � � �������� ��
. Problemas:
– Nunca cancelar polos y ceros inestables.
– El retraso de un sistema siempre debe ser positivo. Considerar
retraso cero.
– ���� : Numero de polos mayor que numero de ceros. Anadir
polos rapidos con ganancia unidad.
– Conclusion: Sistemas inestables, con retraso o de respuesta
inversa no pueden ser cancelado totalmente.
� Prefiltro de entrada: Filtro, normalmente de primer orden, que
acomode un escalon en la referencia a la senal con menos
pendiente para introducir en el sistema. Evita saturaciones.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 51
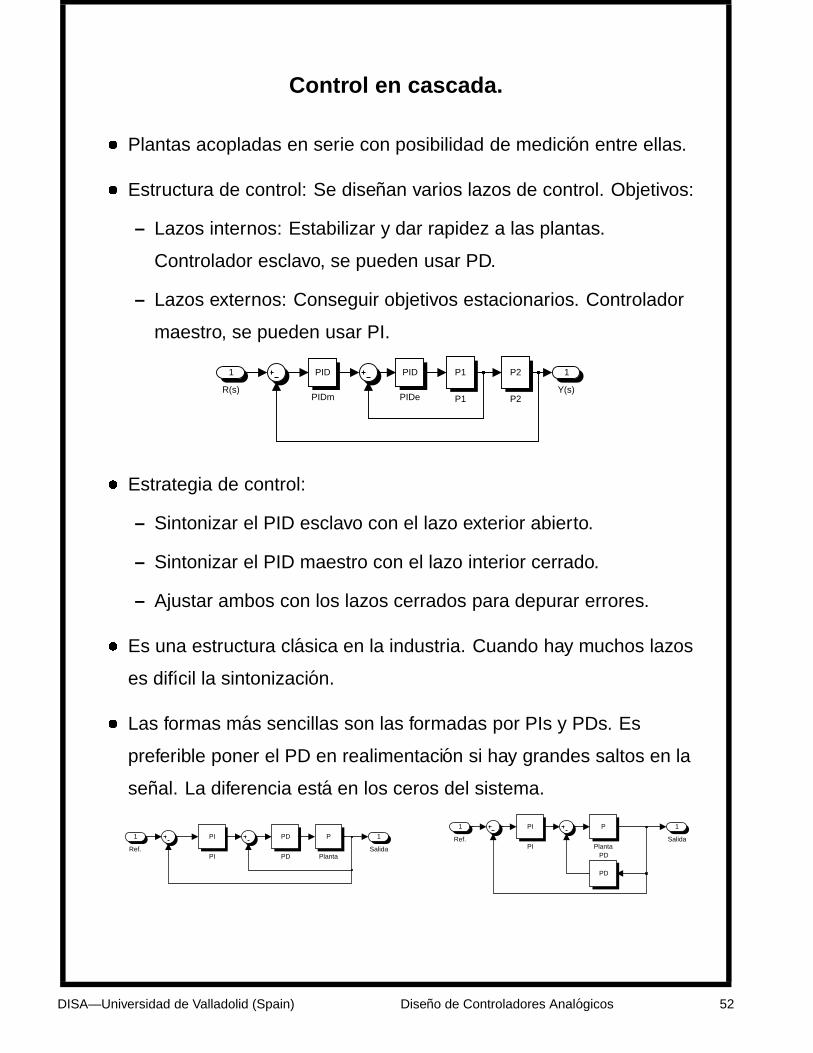
Control en cascada.
� Plantas acopladas en serie con posibilidad de medicion entre ellas.
� Estructura de control: Se disenan varios lazos de control. Objetivos:
– Lazos internos: Estabilizar y dar rapidez a las plantas.
Controlador esclavo, se pueden usar PD.
– Lazos externos: Conseguir objetivos estacionarios. Controlador
maestro, se pueden usar PI.
1
Y(s)
PID
PIDm
PID
PIDe
P2
P2
P1
P1
1
R(s)
� Estrategia de control:
– Sintonizar el PID esclavo con el lazo exterior abierto.
– Sintonizar el PID maestro con el lazo interior cerrado.
– Ajustar ambos con los lazos cerrados para depurar errores.
� Es una estructura clasica en la industria. Cuando hay muchos lazos
es difıcil la sintonizacion.
� Las formas mas sencillas son las formadas por PIs y PDs. Es
preferible poner el PD en realimentacion si hay grandes saltos en la
senal. La diferencia esta en los ceros del sistema.
1
Salida
P
Planta
PI
PI
PD
PD
1
Ref.
1
Salida
P
Planta
PI
PI
PD
PD
1
Ref.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 52
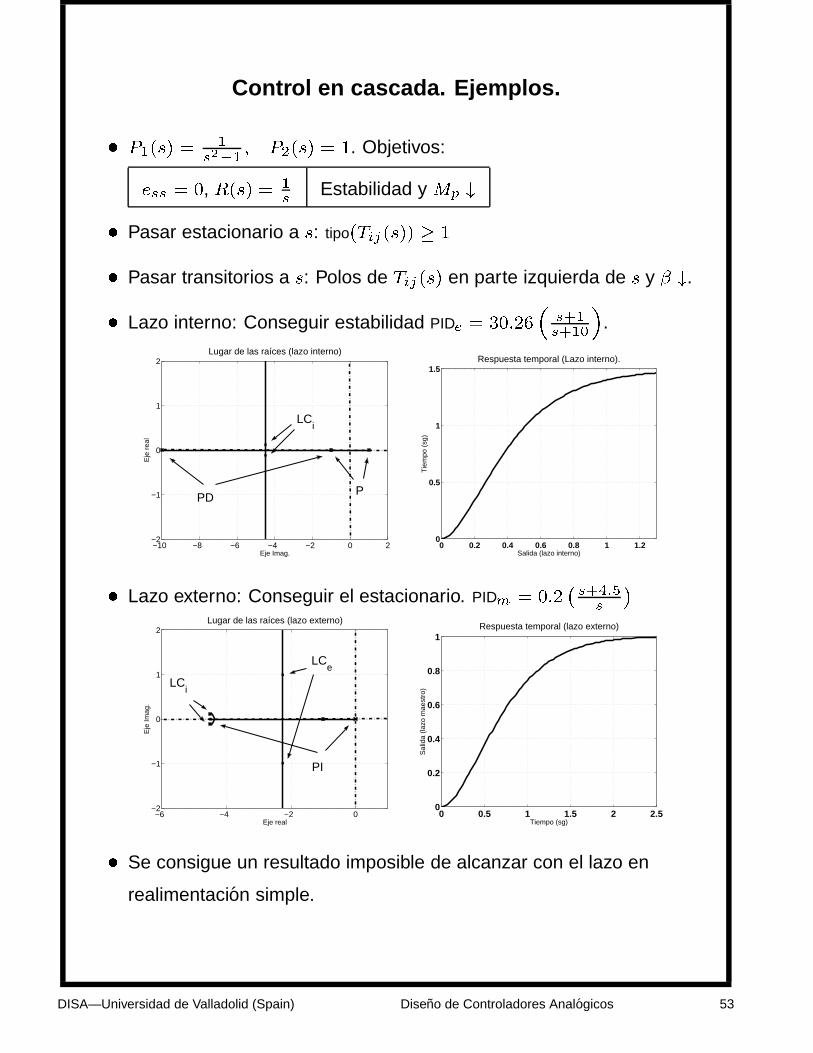
Control en cascada. Ejemplos.
� ��� � � ���� ��� � � �. Objetivos:
� � , �� � � �
Estabilidad y �� �
� Pasar estacionario a : tipo����� �� � �
� Pasar transitorios a : Polos de ���� � en parte izquierda de y � �.
� Lazo interno: Conseguir estabilidad PID� � ����������
�.
−10 −8 −6 −4 −2 0 2−2
−1
0
1
2Lugar de las raíces (lazo interno)
Eje
rea
l
Eje Imag.
LCi
P PD
0 0.2 0.4 0.6 0.8 1 1.20
0.5
1
1.5Respuesta temporal (Lazo interno).
Salida (lazo interno)
Tie
mpo
(sg
)
� Lazo externo: Conseguir el estacionario. PID� � �������
�
−6 −4 −2 0−2
−1
0
1
2Lugar de las raíces (lazo externo)
Eje
Imag
.
Eje real
LCi
PI
LCe
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1Respuesta temporal (lazo externo)
Tiempo (sg)
Sal
ida
(lazo
mae
stro
)
� Se consigue un resultado imposible de alcanzar con el lazo en
realimentacion simple.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 53
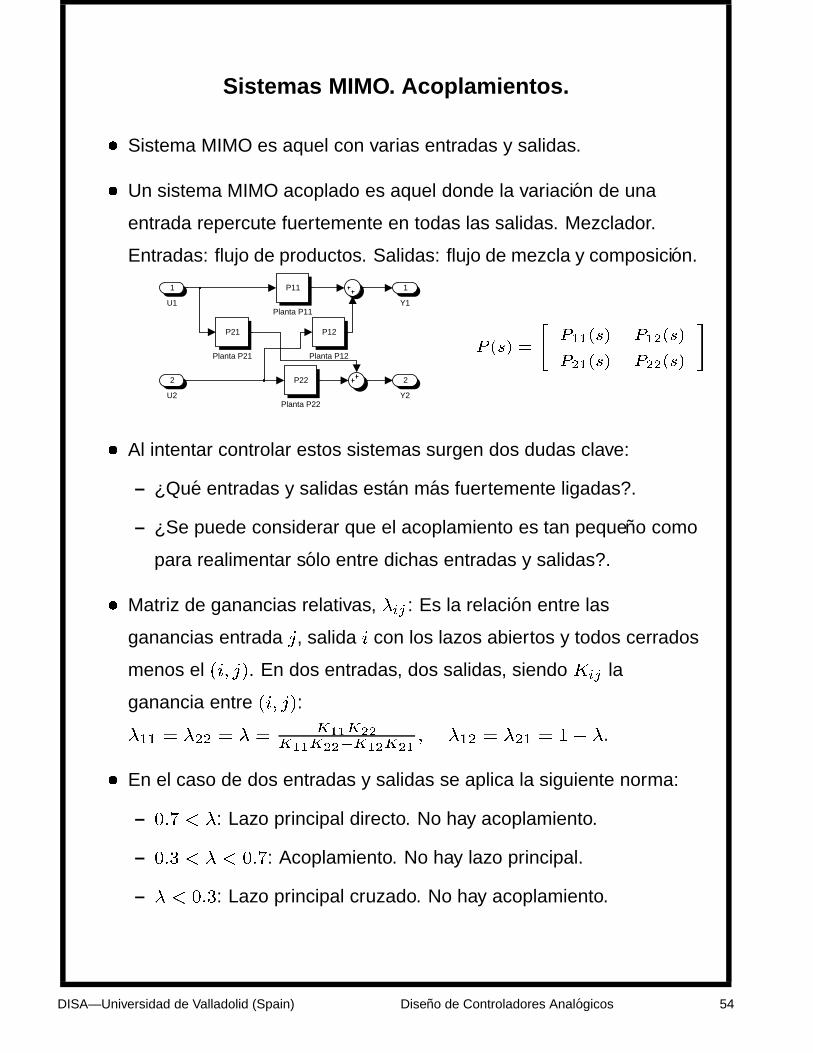
Sistemas MIMO. Acoplamientos.
� Sistema MIMO es aquel con varias entradas y salidas.
� Un sistema MIMO acoplado es aquel donde la variacion de una
entrada repercute fuertemente en todas las salidas. Mezclador.
Entradas: flujo de productos. Salidas: flujo de mezcla y composicion.
2
Y2
1
Y1
P22
Planta P22
P21
Planta P21
P12
Planta P12
P11
Planta P11
2
U2
1
U1
� ��� �
������� ������
������ ������
�
� Al intentar controlar estos sistemas surgen dos dudas clave:
– ¿Que entradas y salidas estan mas fuertemente ligadas?.
– ¿Se puede considerar que el acoplamiento es tan pequeno como
para realimentar solo entre dichas entradas y salidas?.
� Matriz de ganancias relativas, 1�� : Es la relacion entre las
ganancias entrada -, salida � con los lazos abiertos y todos cerrados
menos el �� -�. En dos entradas, dos salidas, siendo ��� la
ganancia entre �� -�:
1�� � 1�� � 1 � ������
������������� 1�� � 1�� � �� 1.
� En el caso de dos entradas y salidas se aplica la siguiente norma:
– �# $ 1: Lazo principal directo. No hay acoplamiento.
– �� $ 1 $ �#: Acoplamiento. No hay lazo principal.
– 1 $ ��: Lazo principal cruzado. No hay acoplamiento.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 54
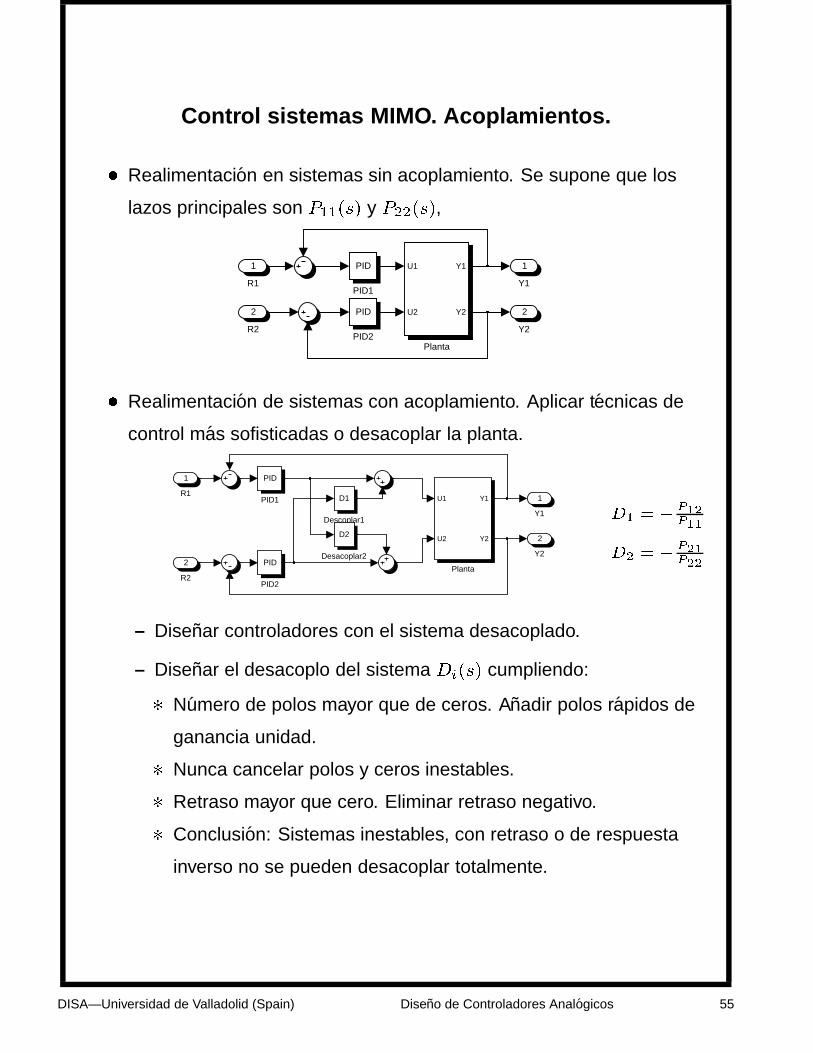
Control sistemas MIMO. Acoplamientos.
� Realimentacion en sistemas sin acoplamiento. Se supone que los
lazos principales son ���� � y ���� �,
2
Y2
1
Y1
U1
U2
Y1
Y2
Planta
PID
PID2
PID
PID1
2
R2
1
R1
� Realimentacion de sistemas con acoplamiento. Aplicar tecnicas de
control mas sofisticadas o desacoplar la planta.
2
Y2
1
Y1
U1
U2
Y1
Y2
PlantaPID
PID2
PID
PID1 D1
Descoplar1
D2
Desacoplar22
R2
1
R1
�� � �������
�� � �������
– Disenar controladores con el sistema desacoplado.
– Disenar el desacoplo del sistema 2�� � cumpliendo:
� Numero de polos mayor que de ceros. Anadir polos rapidos de
ganancia unidad.
� Nunca cancelar polos y ceros inestables.
� Retraso mayor que cero. Eliminar retraso negativo.
� Conclusion: Sistemas inestables, con retraso o de respuesta
inverso no se pueden desacoplar totalmente.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 55
Metodos de control avanzado.
Control basado en modelos.
� Sistemas con dinamicas difıciles: Aquellos cuyas dinamicas no se
pueden cancelar directamente, sistemas inestables, con retraso y de
respuesta inversa. Tambien llamados sistemas de fase no mınima.
� Control por sıntesis directa. A partir de la trayectoria en lazo cerrado
deseada, %� � � ��� �, se obtiene el controlador que se precisa,
�� � � ��
�������� .
– El controlador cancela las dinamicas de la planta y las reemplaza
por las deseadas. No se pueden usar con sistemas difıciles por
no ser cancelables sus dinamicas.
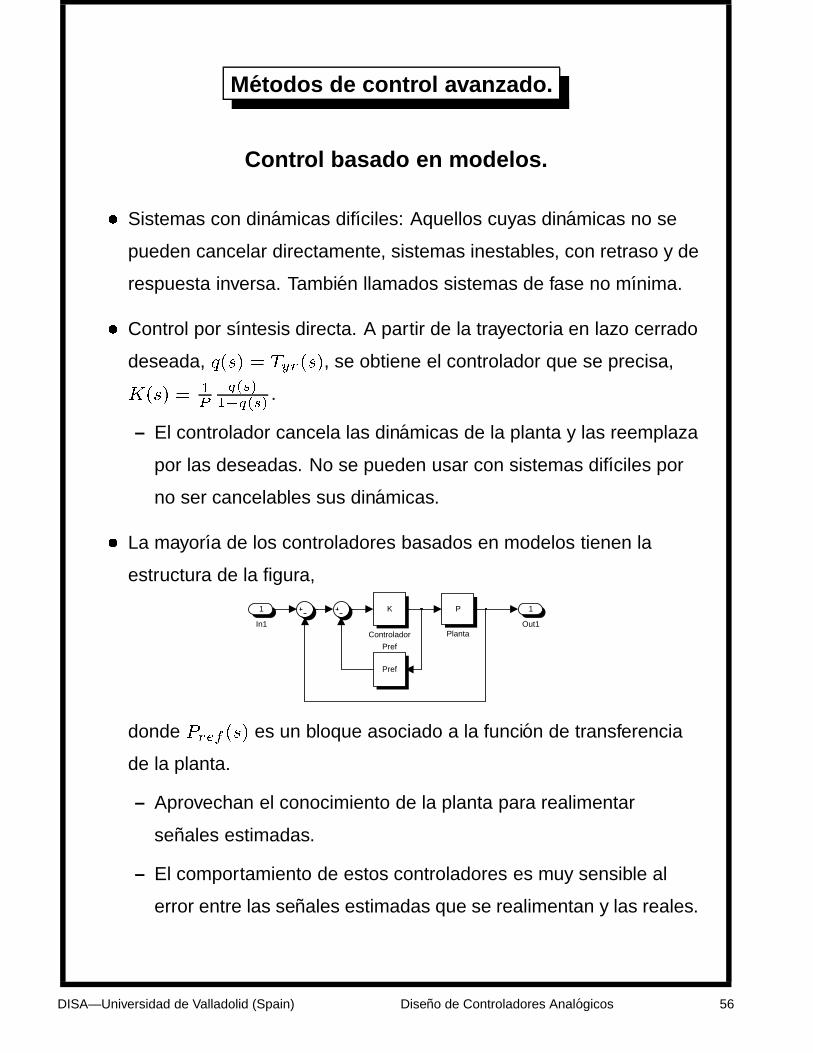
� La mayorıa de los controladores basados en modelos tienen la
estructura de la figura,
1
Out1
Pref
Pref
P
Planta
K
Controlador
1
In1
donde ���� � � es un bloque asociado a la funcion de transferencia
de la planta.
– Aprovechan el conocimiento de la planta para realimentar
senales estimadas.
– El comportamiento de estos controladores es muy sensible al
error entre las senales estimadas que se realimentan y las reales.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 56
Control basado en modelos.
� Modelo de control interno: Elimina el efecto de la planta en la
realimentacion, ���� � � � �� �� �, � �� � es la planta estimada.
– Si ��� � � � � �� � ��� � � � � ��� ��.
– La realimentacion solo se usa si hay perturbaciones o
variaciones en la planta.
– Diseno de un �� � en lazo abierto.
� Predictor de Smith: Sea � � � � � �� ��� , entonces
���� � � � � ��� ��� � �� ��,
– Se realimenta la senal estimada sin retraso de la planta.
– Si � �� � � �� � �� � ��� � ��� � � � ��� ��� �,
donde � ��� � �� ������
��� ������es el sistema que se hubiera
obtenido si la planta no tuviera retraso.
– El retraso no incluye en el L.R. � Mayor estabilidad.
– Sensible al error en la senal estimada. Uso industrial.
– Diseno de un �� � para planta sin retraso.
� Controlador de respuesta inversa: Sea � � � � � �� ��� � 3 �,
entonces ���� � � � � ��� ��1 �, con 1 �3.
– Se realimenta la senal sin respuesta inversa.
– Si � �� � � �� � ��� � �� ���������.�
��� ���������.�.
– La respuesta inversa no influye en el L.R. (lazo cerrado).
– Diseno de un �� � para planta sin respuesta inversa.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 57
PID auto-tuning y self-tuning.
� La planta � � � cambia en el tiempo:
– Modificacion de sus parametros en el tiempo.
– Cambio de punto de equilibrio.
� Los PIDs pueden ajustarse a los cambios producidos en la planta.
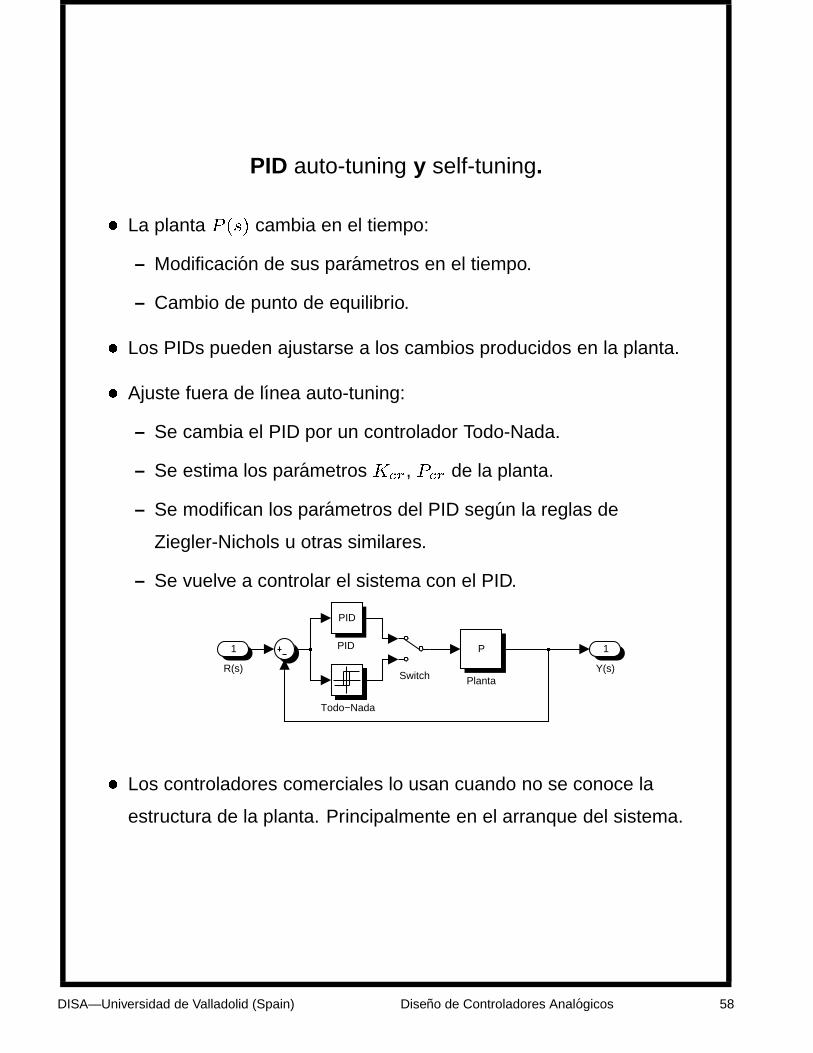
� Ajuste fuera de lınea auto-tuning:
– Se cambia el PID por un controlador Todo-Nada.
– Se estima los parametros ��� , ��� de la planta.
– Se modifican los parametros del PID segun la reglas de
Ziegler-Nichols u otras similares.
– Se vuelve a controlar el sistema con el PID.
1
Y(s)
Todo−Nada
Switch
P
Planta
PID
PID 1
R(s)
� Los controladores comerciales lo usan cuando no se conoce la
estructura de la planta. Principalmente en el arranque del sistema.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 58
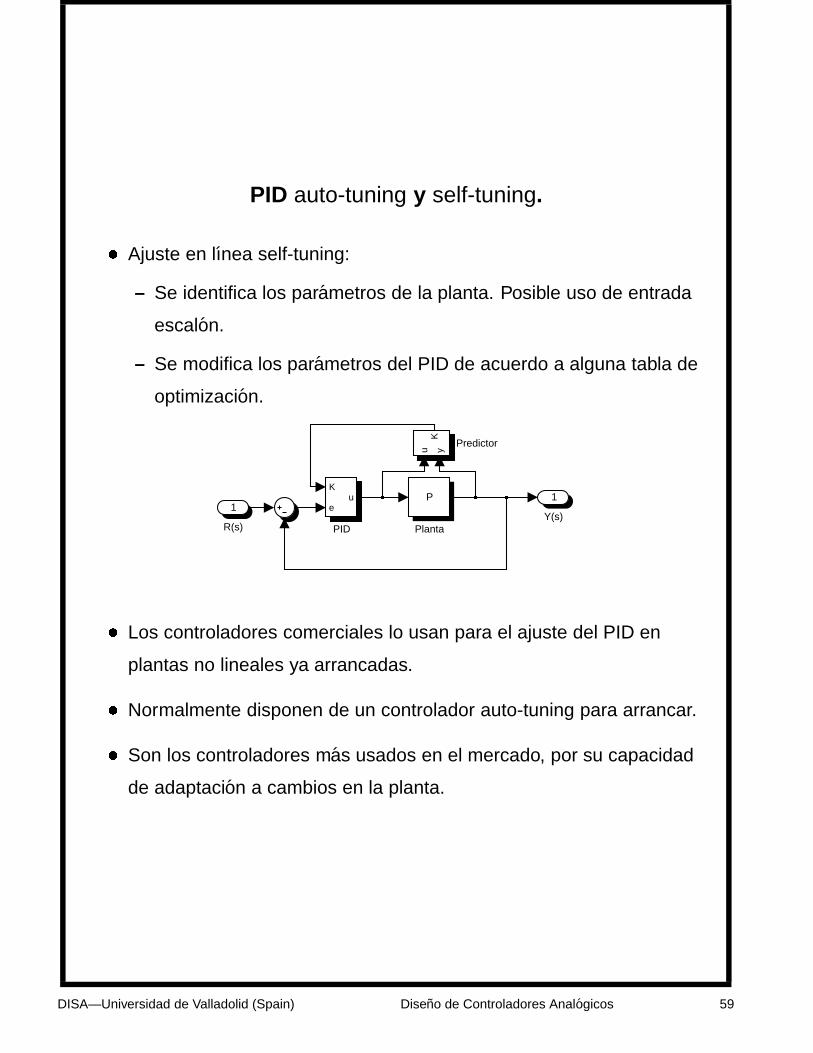
PID auto-tuning y self-tuning.
� Ajuste en lınea self-tuning:
– Se identifica los parametros de la planta. Posible uso de entrada
escalon.
– Se modifica los parametros del PID de acuerdo a alguna tabla de
optimizacion.
1
Y(s)
u yK
Predictor
P
Planta
K
eu
PID
1
R(s)
� Los controladores comerciales lo usan para el ajuste del PID en
plantas no lineales ya arrancadas.
� Normalmente disponen de un controlador auto-tuning para arrancar.
� Son los controladores mas usados en el mercado, por su capacidad
de adaptacion a cambios en la planta.
DISA—Universidad de Valladolid (Spain) Diseno de Controladores Analogicos 59