Embed Size (px)
DESCRIPTION
Teoaria de control Automatico
Citation preview

Tema 9: Tema 9: Controladores PIDControladores PID
Teoría del Control Automático
Carlos Calderón | ETT | UTPL
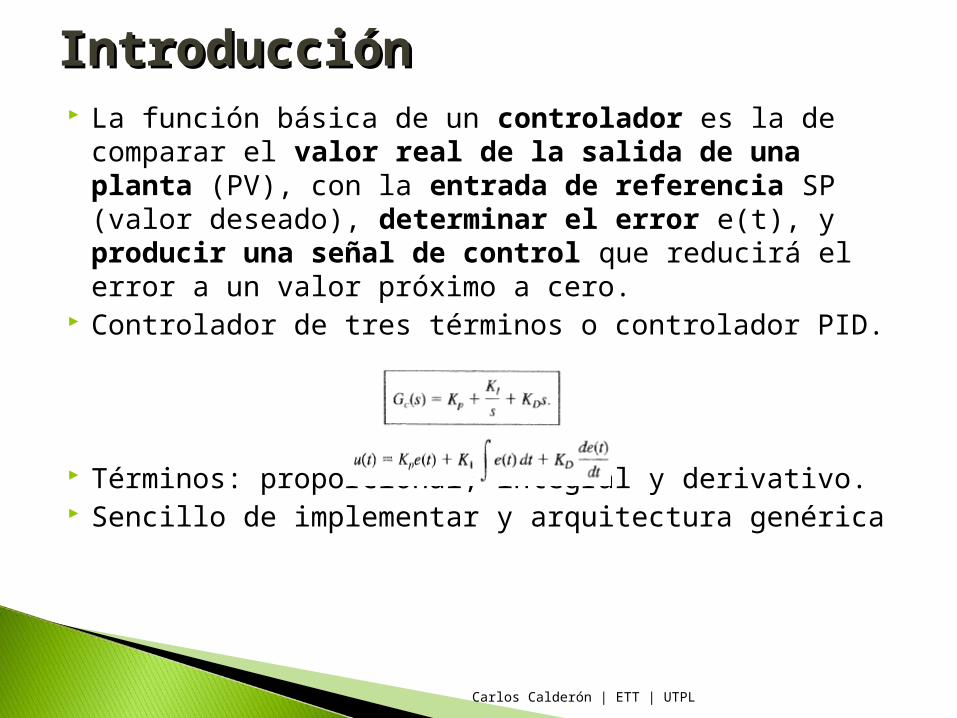
La función básica de un controlador es la de comparar el valor real de la salida de una planta (PV), con la entrada de referencia SP (valor deseado), determinar el error e(t), y producir una señal de control que reducirá el error a un valor próximo a cero.
Controlador de tres términos o controlador PID.
Términos: proporcional, integral y derivativo. Sencillo de implementar y arquitectura genérica
IntroducciónIntroducción
Carlos Calderón | ETT | UTPL

EsquemaEsquema
Carlos Calderón | ETT | UTPL

Carlos Calderón | ETT | UTPL

Un controlador que consiste sólo en una ganancia es llamado Proporcional (P). La velocidad a la cual la salida puede responder a la señal de error depende de la ganancia del controlador. Por lo tanto aumentando dicha ganancia, el tiempo de subida del sistema puede ser decrementado, permitiendo que la salida siga a la entrada más rápidamente. Sin embargo, esto agrega el problema de provocar un aumento de sobreoscilación, causando oscilaciones en la salida, atentando contra la estabilidad del sistema. Además, una constante de ganancia amplifica el ruido a alta frecuencia, causando una disminución del ancho de banda del sistema de control.
Controlador PID: Efecto PControlador PID: Efecto P
Carlos Calderón | ETT | UTPL

Para eliminar el error de estado estacionario, se agrega un término integral. Este término le da la habilidad al controlador PID de “recordar el pasado”, permitiendo también dar una salida distinta de cero para una entrada nula. Así dicho controlador permite tener un error de estado estacionario igual a cero. Como contrapartida el integrador adiciona un polo en la función de lazo cerrado, con lo cual la estabilidad del sistema decae.
Controlador PID: Efecto IControlador PID: Efecto I
Carlos Calderón | ETT | UTPL

Una forma de reducir el tiempo de subida sin aumentar el porcentaje de sobrepaso es agregar un término derivativo al controlador P, dado que la derivada de la señal de error provee información acerca de cómo el error va cambiando con respecto al tiempo. De este modo, el controlador puede estimar valores futuros de la señal de error y compensar adecuadamente.
Un problema asociado con el PD es que funciona como un filtro pasa-altos. Por ello, el controlador PD amplifica el ruido de alta frecuencia, lo que reduce la estabilidad del sistema total.
Controlador PID: Efecto DControlador PID: Efecto D
Carlos Calderón | ETT | UTPL

Resumen IResumen I
Carlos Calderón | ETT | UTPL

Resumen IIResumen II
Carlos Calderón | ETT | UTPL

PID Academic
PID Parallel
PID Series
Arquitecturas PIDArquitecturas PID
Carlos Calderón | ETT | UTPL

Arquitectura estándar ISAArquitectura estándar ISA
Carlos Calderón | ETT | UTPL

DispositivosDispositivos
Carlos Calderón | ETT | UTPL

La Sintonía consiste en el proceso llevado a cabo para ajustar los Parámetros de un Regulador.
Métodos Analíticos: sólo aplicables si se conoce el Modelo Matemático de la Planta a controlar. Mediante técnicas de análisis temporal y/o frecuencial, es posible calcular los Parámetros del Regulador.
Métodos Empíricos: permiten calcular los Parámetros del Regulador sin conocer el Modelo Matemático de la Planta
Sintonía de controladores Sintonía de controladores PIDPID
Carlos Calderón | ETT | UTPL

SintoníaSintonía
Carlos Calderón | ETT | UTPL

Índices de errorÍndices de error
Carlos Calderón | ETT | UTPL

Lazo abiertoLazo abierto
Carlos Calderón | ETT | UTPL

Obtener curva característica Obtener curva característica del sistemadel sistema
Carlos Calderón | ETT | UTPL

Lazo abierto: tipos de Lazo abierto: tipos de respuestasrespuestas
Carlos Calderón | ETT | UTPL

Método Ziegler-Nichols OLMétodo Ziegler-Nichols OL
Carlos Calderón | ETT | UTPL

Método Ziegler-Nichols OLMétodo Ziegler-Nichols OL
Carlos Calderón | ETT | UTPL

Ajuste de parámetros PID Z-N Ajuste de parámetros PID Z-N OLOL
Carlos Calderón | ETT | UTPL
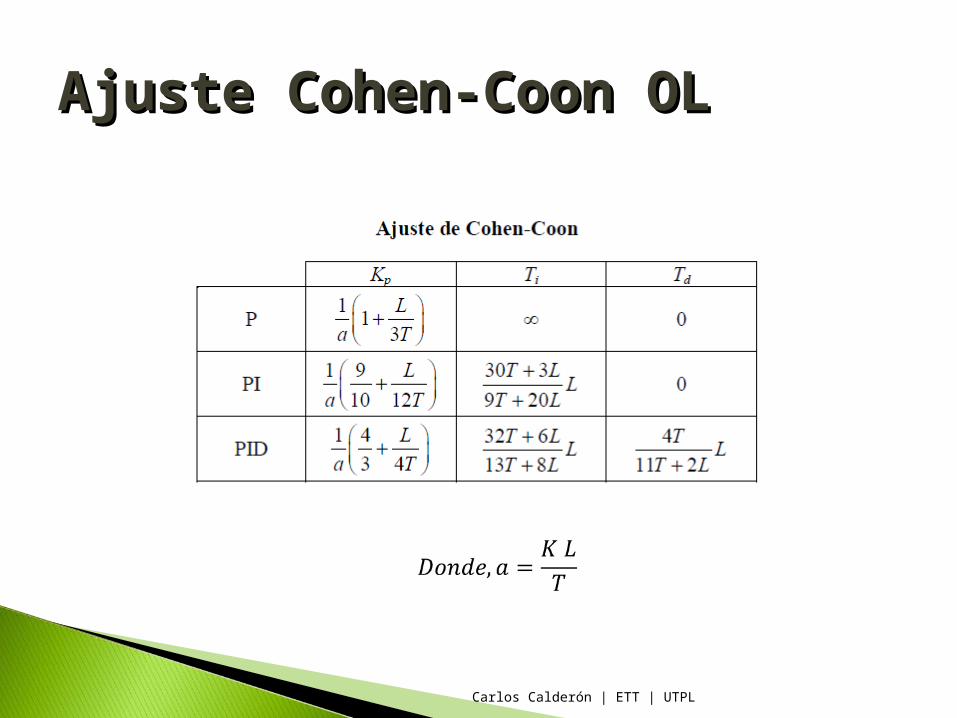
Ajuste Cohen-Coon OLAjuste Cohen-Coon OL
Carlos Calderón | ETT | UTPL

Ziegler-Nichols lazo cerrado Ziegler-Nichols lazo cerrado (CL)(CL)
Carlos Calderón | ETT | UTPL

Ajuste de parámetros Z-N Ajuste de parámetros Z-N CLCL
Carlos Calderón | ETT | UTPL

Ajustar el controlador PID mediante Z-N LC. Mediante prueba y error.
Ejercicio 1Ejercicio 1
Carlos Calderón | ETT | UTPL

Sintonizar PID, mediante Z-N (CL ó OL). Consolidar resultado con análisis LGR y tabla R-H.
Analizar respuesta temporal:◦ P◦ PI◦ PID
Ejercicio 2Ejercicio 2
Carlos Calderón | ETT | UTPL

Sintonizar PID, mediante Z-N (CL ó OL). Consolidar resultado con análisis LGR y tabla R-H.
Analizar respuesta temporal:◦ P◦ PI◦ PID
Ejercicio 3Ejercicio 3
Carlos Calderón | ETT | UTPL
P para el tiempo de respuesta D para la sobreoscilación I para eliminar error en estado estable No siempre debe ser una arquitectura PID,
se puede obviar el componente derivativo.
ResumenResumen
Carlos Calderón | ETT | UTPL

Respuesta plana.- la respuesta que alcanza rápidamente el nivel deseado y se mantiene en ese nivel con una sobreelongación mínima.
El rango de variación aceptable es la banda del ±2% del nivel deseado.
Respuesta PlanaRespuesta Plana
Carlos Calderón | ETT | UTPL

Características de una respuesta plana: Error en estado estacionario = 0. Respuesta rápida, mínimo tiempo de subida
y mínimo tiempo de establecimiento. Porcentaje de sobreelongación entre 0.1% y
2% (banda del ±2% para encontrar Ts). Se debe eliminar el efecto de los ceros
mediante Gp.
Respuesta PlanaRespuesta Plana
Carlos Calderón | ETT | UTPL

1. Determinar wn del sistema en lazo cerrado T1(s), en base a las restricciones.
2. Determinar los coeficientes del denominador de T1(s), utilizando la ecuación óptima apropiada.
ProcedimientoProcedimiento
Carlos Calderón | ETT | UTPL

3. Determinar un prefiltro Gp(s) de forma que la función de transferencia en lazo cerrado T(s) no tenga ningún cero.
Numerador_T1(s) x Gp(s)= wni
ProcedimientoProcedimiento
Carlos Calderón | ETT | UTPL

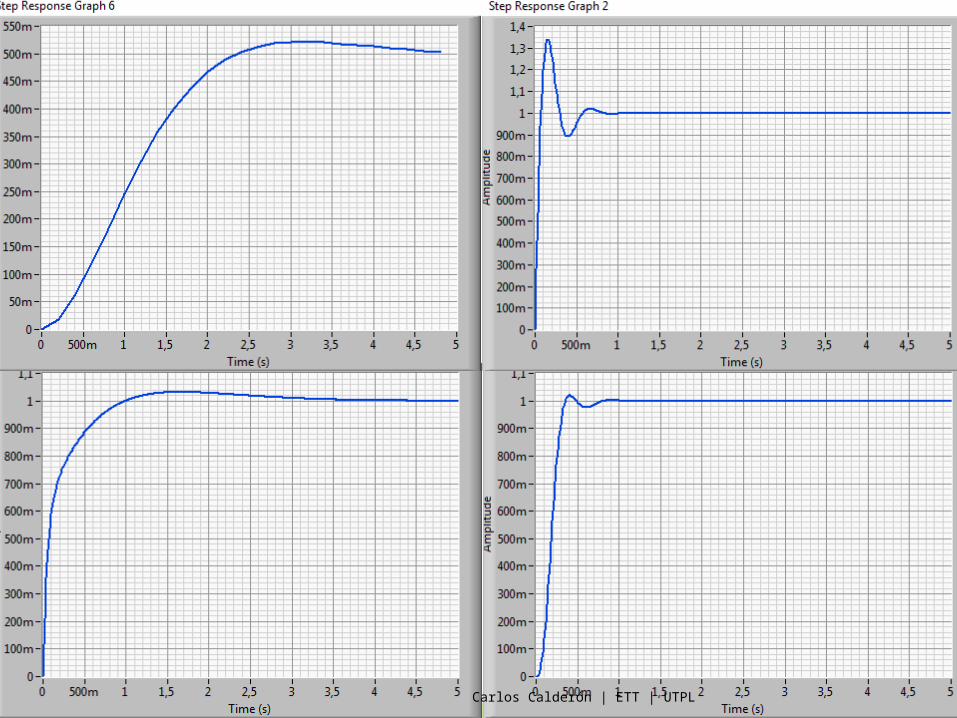
Determinar un Controlador PID óptimo (según criterio basado en el índice de comportamiento ITAE):
Gp(s)=? Simular el sistema para una entrada de escalón y
para una perturbación de escalón: A) Gc=1 y Gp=1; B) Gc= PID(óptimo) y Gp=1; C) Gc= PID(ZN-CL ó ZN-OL) y Gp=1; D) Gc= PID(óptimo) y Gp determinada
Ejercicio 4Ejercicio 4
Carlos Calderón | ETT | UTPL

SoluciónSolución
Carlos Calderón | ETT | UTPL
Solución 2Solución 2
Carlos Calderón | ETT | UTPL

Determinar un Controlador PID óptimo (según criterio basado en el índice de comportamiento ITAE):
Simular el sistema para una entrada de escalón y para una perturbación de escalón:
A) Gc=1 y Gp=1; B) Gc= PID(ZN-CL / ZN-OL) y Gp=1; C) Gc= PID(CC-OL) y Gp=1; D) Gc= PID(óptimo) y Gp=1; E) Gc= PID(óptimo) y Gp determinada
Ejercicio 5Ejercicio 5
Carlos Calderón | ETT | UTPL