Embed Size (px)
Citation preview
Digital Image Processing
Lecture 4
Image Restoration and Reconstruction
Second Semester
Azad University
Islamshar Branch
Image Restoration• The main aim of restoration is to improve an image in
some predefined way.
• Image restoration tries to reconstruct or recover an image which was degraded using a priori knowledge of degradation.
• Here we model the degradation and apply the inverse process to recover the original image.
• Enhancement techniques take advantage of the psychophysical
aspects of human visual system. for example contrast stretching is an enhancement method as it is concerned with the pleasing aspects of a viewer, whereas removl of image blur is a restoration process.

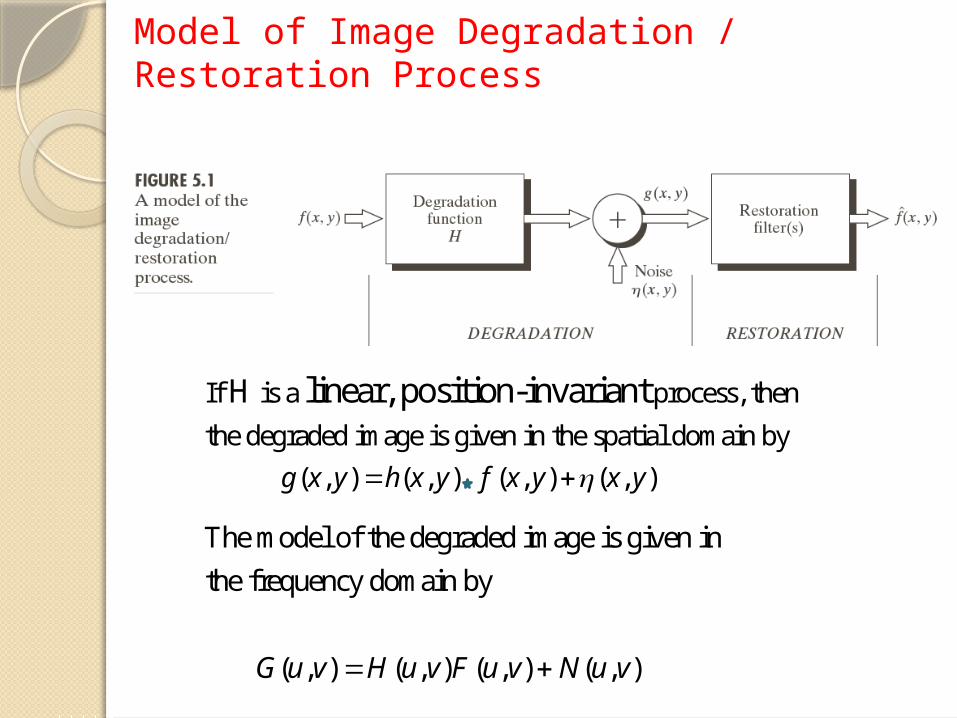
In this model, we assume that there is an additive noise term, operating on an input image f(x,y) to produce a degraded image g(x,y).
Given g(x,y) and some information about degradation function H, and knowledge about noise term η(x,y).
The aim of restoration is to get an estimate f(x,y) of original image.
The more we know about H and term η, we get better results.
Model of Image Degradation / Restoration Process
Model of Image Degradation / Restoration Process
If is a process, then
the degraded image is given in the spatial domain by
( , ) ( , ) ( , ) ( , )
H linear, position-invariant
g x y h x y f x y x y
The model of the degraded image is given in
the frequency domain by
( , ) ( , ) ( , ) ( , )G u v H u v F u v N u v
Noise Sources
The principal sources of noise in digital images arise during image acquisition and/or transmission.
• Image acquisition e.g., light levels, sensor temperature, etc.
• Transmission e.g., lightning or other atmospheric disturbance in wireless network
Noise Models
White noiseThe Fourier spectrum of noise is constant
Gaussian noise
Electronic circuit noise, sensor noise due to poor illumination and/or high temperature
Rayleigh noise
Range imaging
periodic noise With the exception of spatially periodic noise, we assume:
Noise is independent of spatial coordinatesNoise is uncorrelated with respect to the image itself
Erlang (gamma) noise:
Laser imaging
Exponential noise:
Laser imaging
Uniform noise: Least descriptive; Basis for numerous random number generators
Impulse noise:
quick transients, such as faulty switching
Noise Models
2 2( ) /2
The PDF of Gaussian random variable, z, is given by
1 ( )
2z zp z e
where, represents intensity
is the mean (average) value of z
is the standard deviation
z
z
Noise Models
Gaussian Noise
70% of its values will be in the range
95% of its values will be in the range
)(),(
)2(),2(
2
The mean and variance of this density are given by
/ 4
(4 )
4
z a b
b
2( ) /
The PDF of Rayleigh noise is given by
2( ) for
( )0 for
z a bz a e z ap z b
z a
Noise Models
Rayleigh Noise
1
The PDF of Erlang noise is given by
for 0 ( ) ( 1)!
0 for
b baza z
e zp z b
z a
2 2
The mean and variance of this density are given by
/
/
z b a
b a
Noise Models
Erlang (Gamma) Noise
The PDF of exponential noise is given by
for 0 ( )
0 for
azae zp z
z a
2 2
The mean and variance of this density are given by
1/
1/
z a
a
Exponential Noise
Noise Models
The PDF of uniform noise is given by
1 for a
( )0 otherwise
z bp z b a
2 2
The mean and variance of this density are given by
( ) / 2
( ) /12
z a b
b a
Uniform Noise
Noise Models
The PDF of (bipolar) impulse noise is given by
for
( ) for
0 otherwise
a
b
P z a
p z P z b
if , gray-level will appear as a light dot,
while level will appear like a dark dot.
b a b
a
If either or is zero, the impulse noise is calleda bP P
unipolar
Impulse (Salt-and-Pepper) Noise
Noise Models
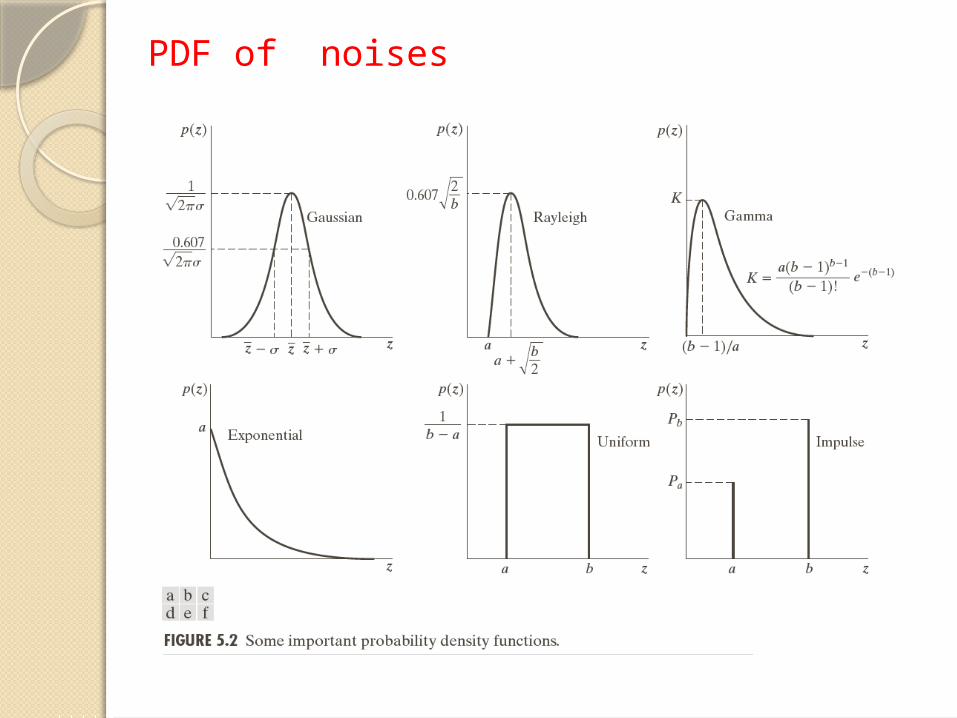
PDF of noises
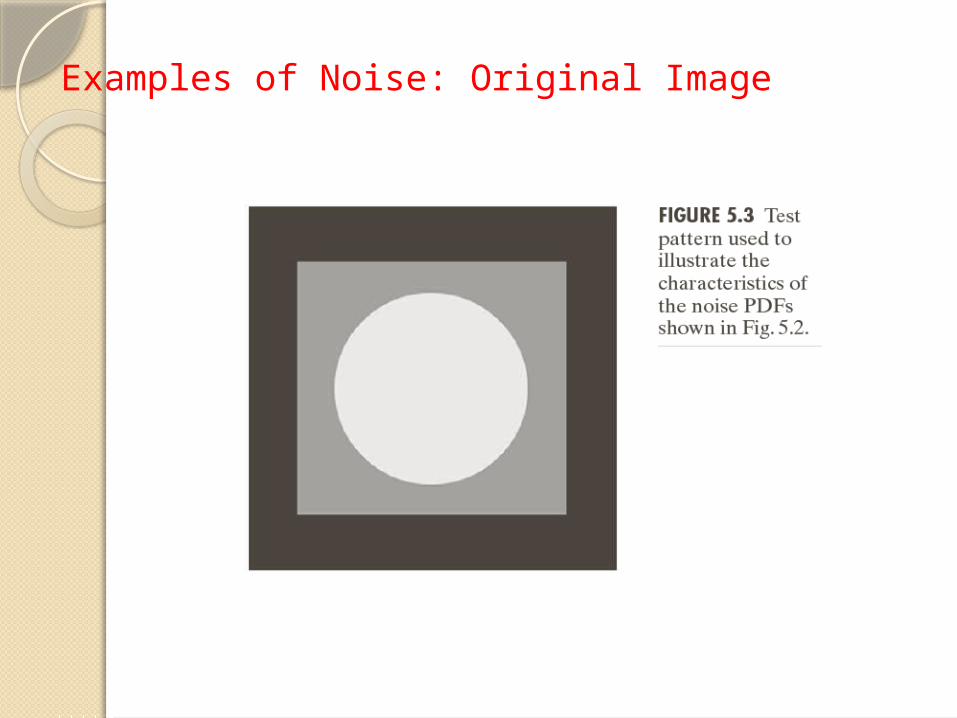
Examples of Noise: Original Image
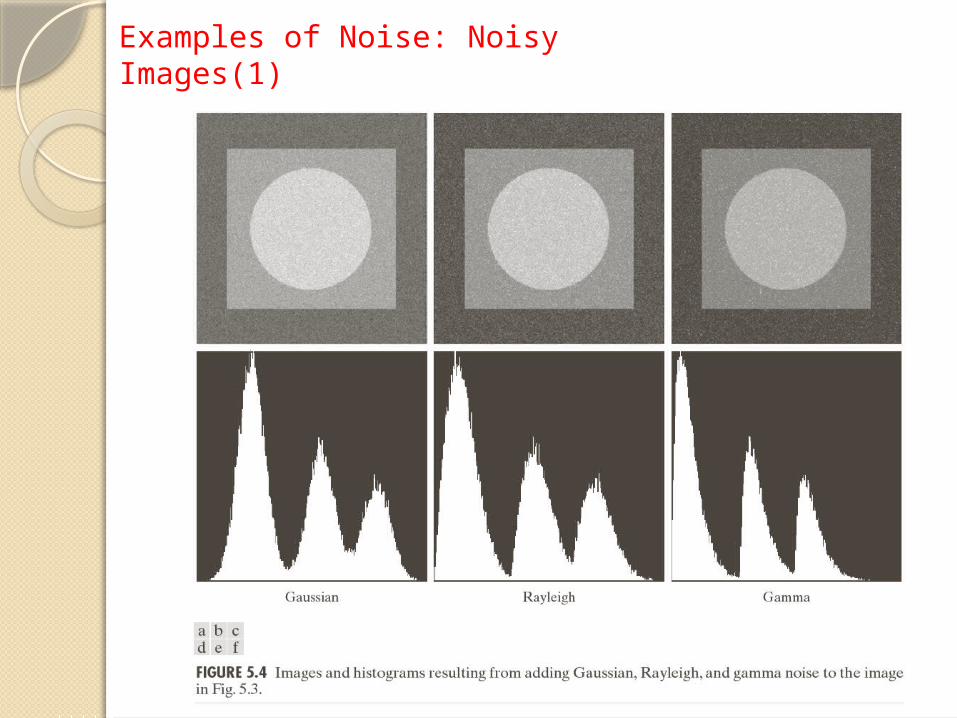
Examples of Noise: Noisy Images(1)
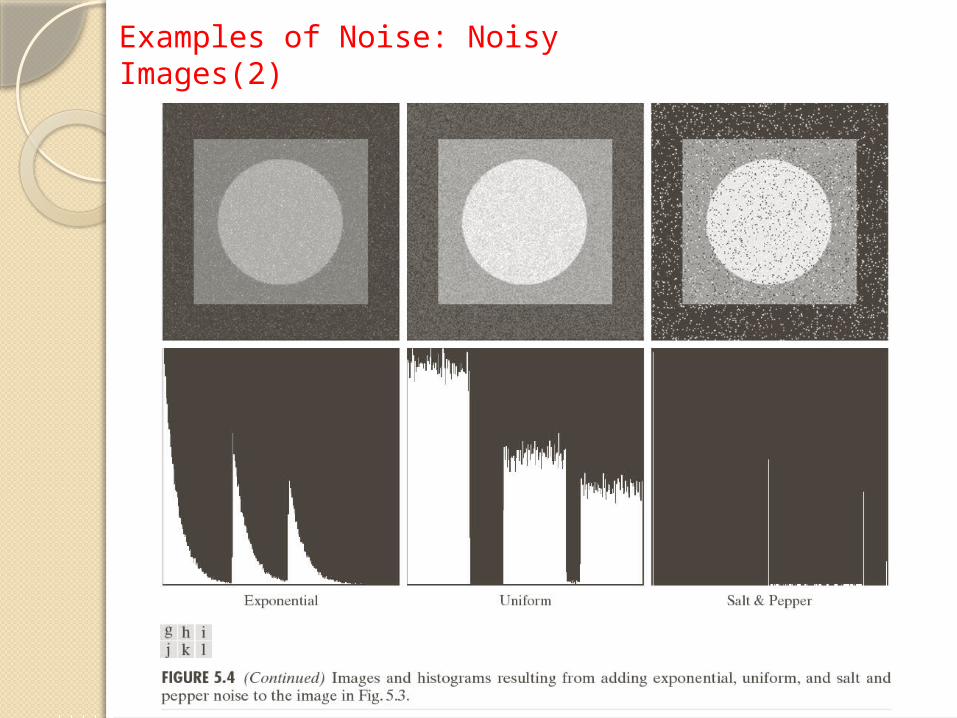
Examples of Noise: Noisy Images(2)
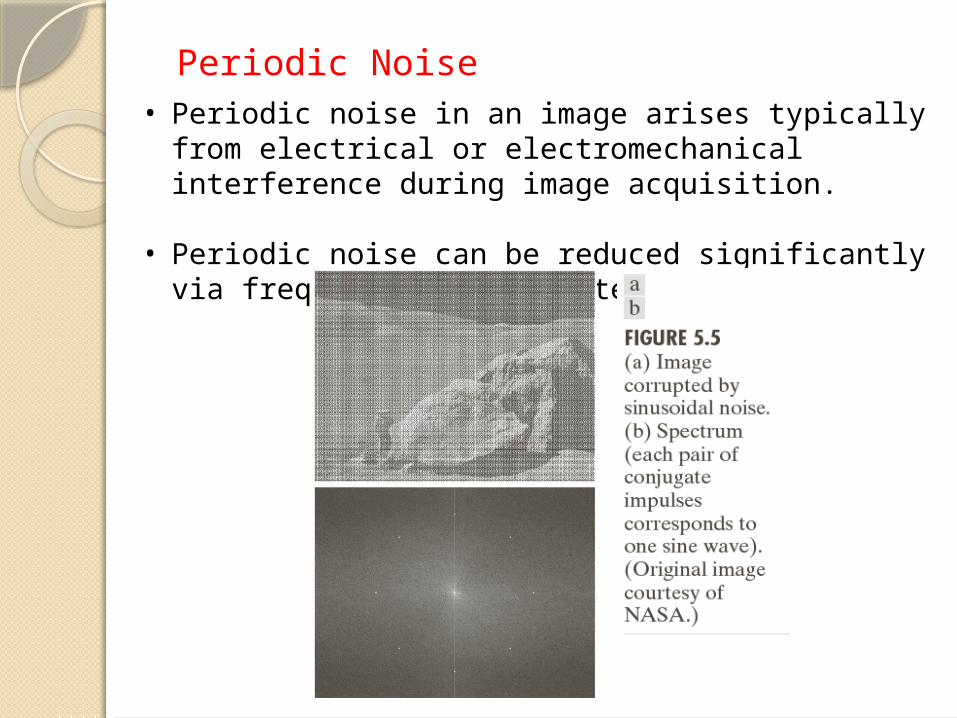
Periodic Noise • Periodic noise in an image arises typically from
electrical or electromechanical interference during image acquisition.
• Periodic noise can be reduced significantly via frequency domain filtering
Estimation of Noise Parameters
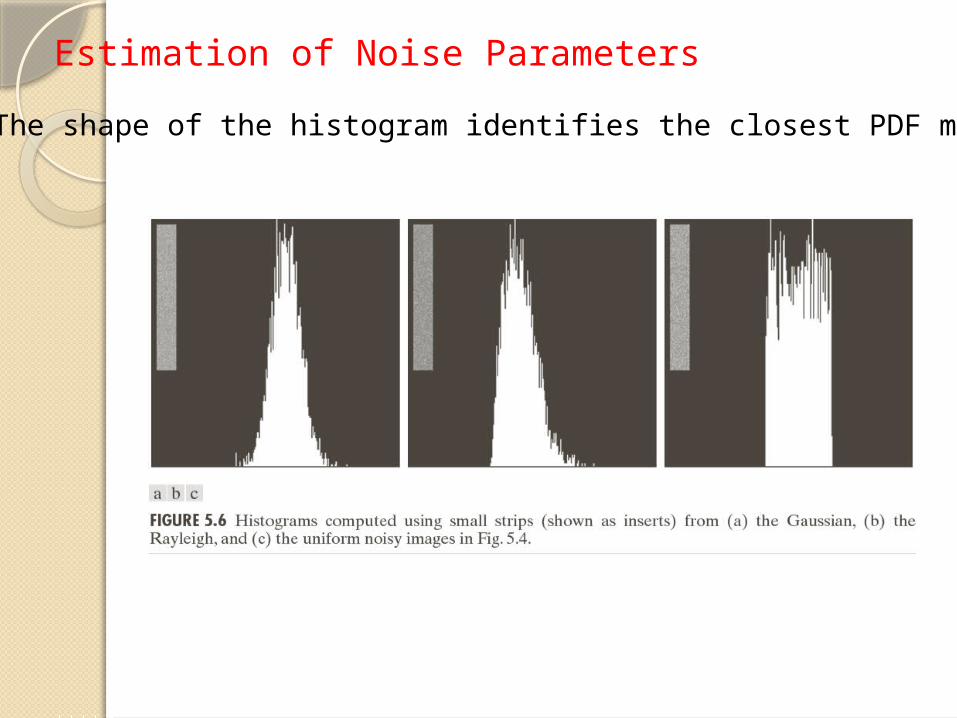
The shape of the histogram identifies the closest PDF match
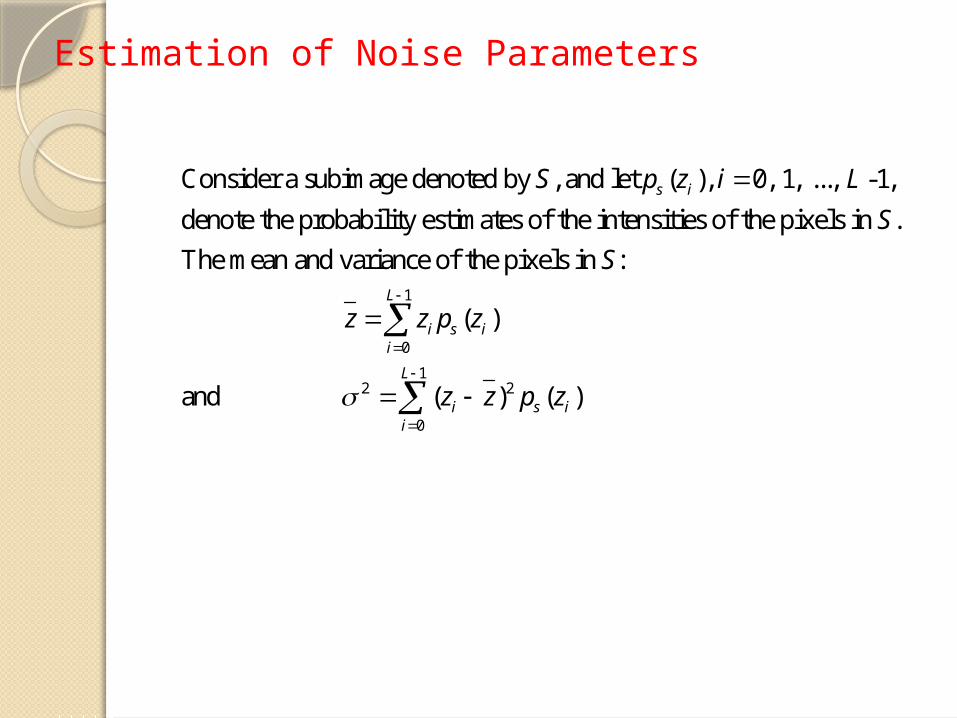
Consider a subimage denoted by , and let ( ), 0, 1, ..., -1,
denote the probability estimates of the intensities of the pixels in .
The mean and variance of the pixels in :
s iS p z i L
S
S
1
0
12 2
0
( )
and ( ) ( )
L
i s ii
L
i s ii
z z p z
z z p z
Estimation of Noise Parameters
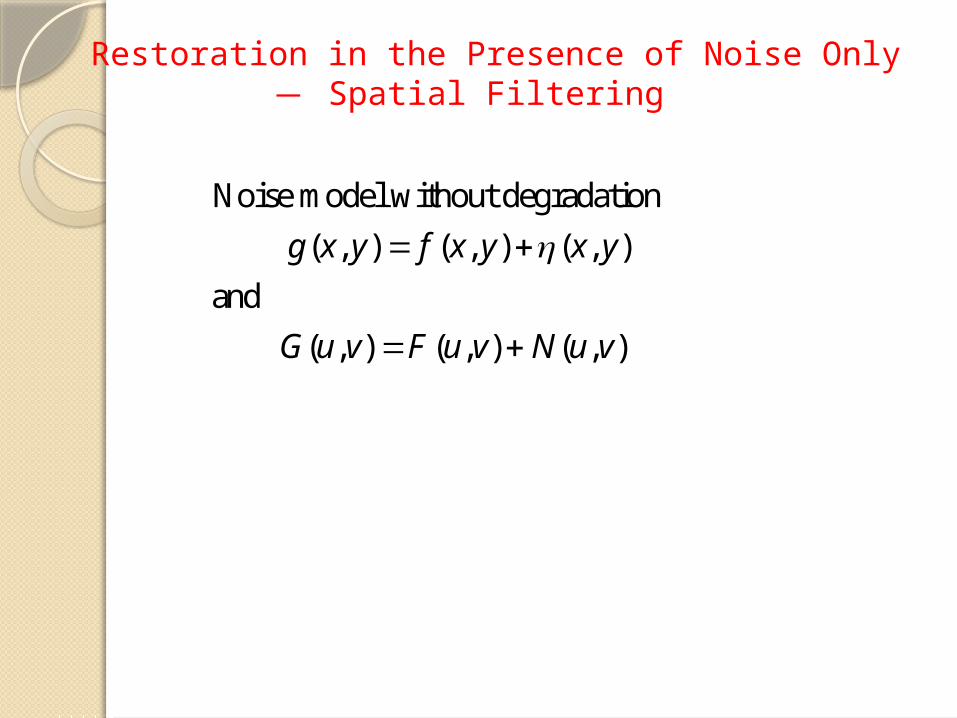
Noise model without degradation
( , ) ( , ) ( , )
and
( , ) ( , ) ( , )
g x y f x y x y
G u v F u v N u v
Restoration in the Presence of Noise Only̶ Spatial Filtering
Spatial Filtering: Mean Filters
Let represent the set of coordinates in a rectangle
subimage window of size , centered at ( , ).
xyS
m n x y
( , )
Arithmetic mean filter
1 ( , ) ( , )
xys t S
f x y g s tmn
1
( , )
Geometric mean filter
( , ) ( , )xy
mn
s t S
f x y g s t
Generally, a geometric mean filter achieves smoothing comparable to the arithmetic mean filter, but it tends to lose less image detail in the process
( , )
Harmonic mean filter
( , )1
( , )xys t S
mnf x y
g s t
Spatial Filtering: Mean Filters
It works well for salt noise, but fails for pepper noise.It does well also with other types of noise like Gaussian noise.
1
( , )
( , )
Contraharmonic mean filter
( , )
( , )( , )
xy
xy
Q
s t S
Q
s t S
g s t
f x yg s t
Q is the order of the filter.
It is well suited for reducing the effects of salt-and-pepper noise. Q>0 for pepper noise and Q<0 for salt noise.
• Arithmetic and geometric mean filters are good for removing random noise like Gaussian or uniform noise.
• Contraharmonic filer is good for impulse noise.
• But it must be known before hand that whether the noise is dark or light to fix the Q value.
Contraharmonic filer vs Arithmetic and geometric mean filters

Spatial Filtering: Example (1)
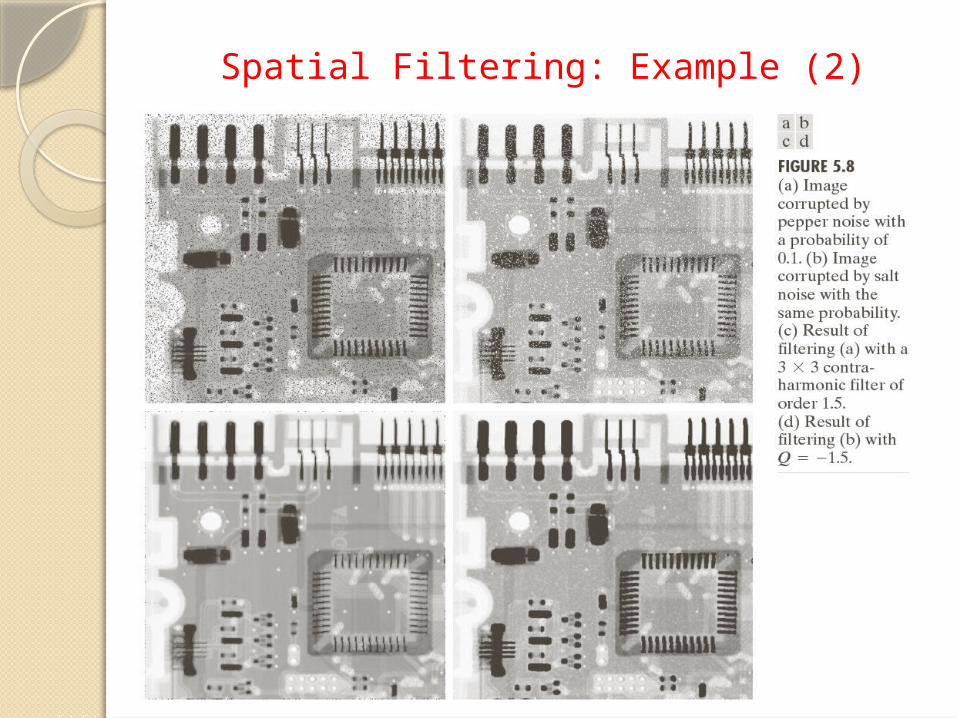
Spatial Filtering: Example (2)
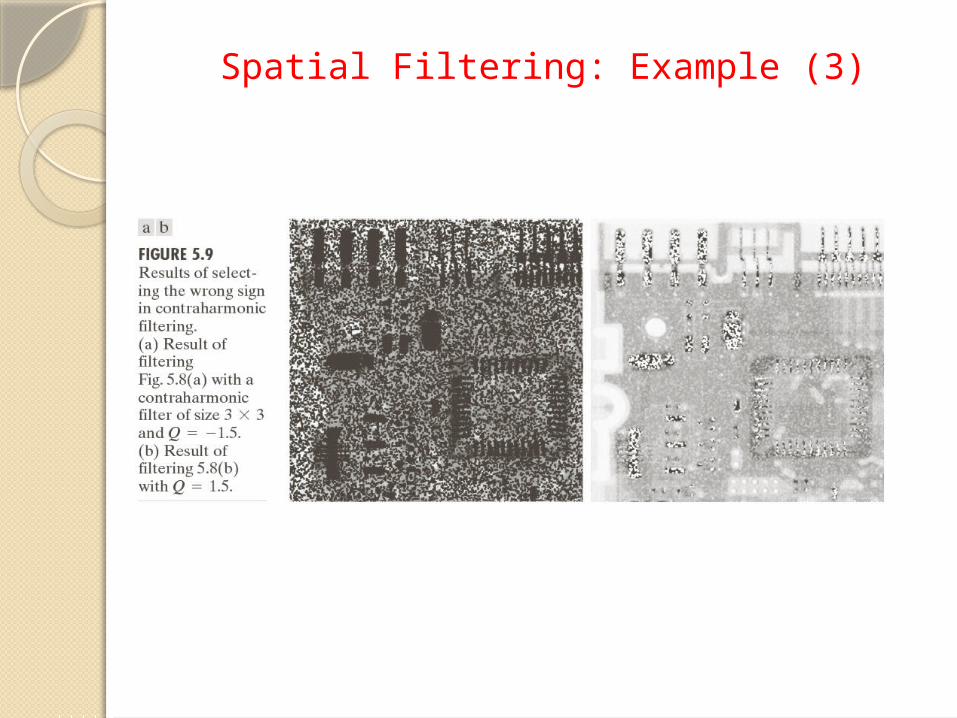
Spatial Filtering: Example (3)
( , )
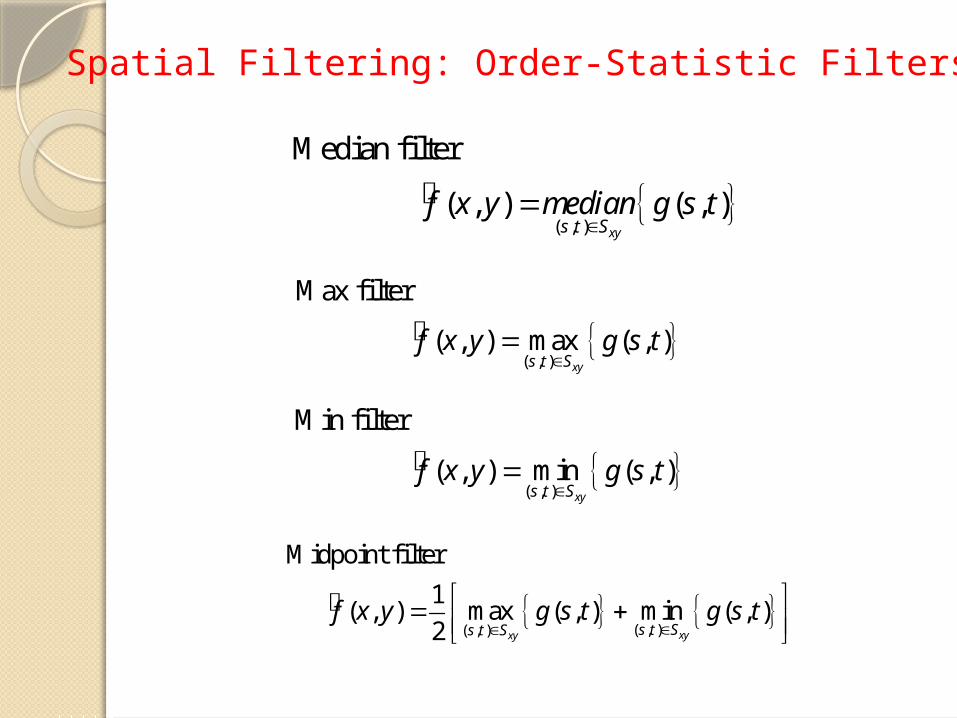
Median filter
( , ) ( , )xys t S
f x y median g s t
( , )
Max filter
( , ) max ( , )xys t S
f x y g s t
( , )
Min filter
( , ) min ( , )xys t S
f x y g s t
Spatial Filtering: Order-Statistic Filters
( , )( , )
Midpoint filter
1 ( , ) max ( , ) min ( , )
2 xyxy s t Ss t Sf x y g s t g s t

( , )
Alpha-trimmed mean filter
1 ( , ) ( , )
xy
rs t S
f x y g s tmn d
Spatial Filtering: Order-Statistic Filters
We delete the / 2 lowest and the / 2 highest intensity values of
( , ) in the neighborhood . Let ( , ) represent the remaining
- pixels.
xy r
d d
g s t S g s t
mn d
A filter formed by averaging these remaining pixels is called an alpha-trimmed mean filter
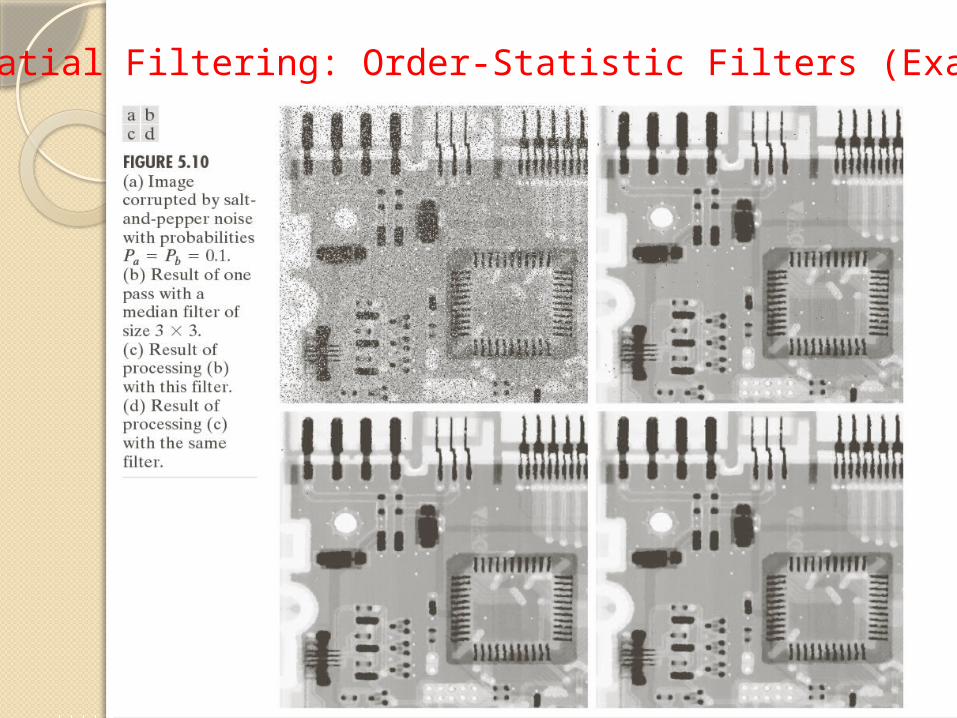
Spatial Filtering: Order-Statistic Filters (Example)
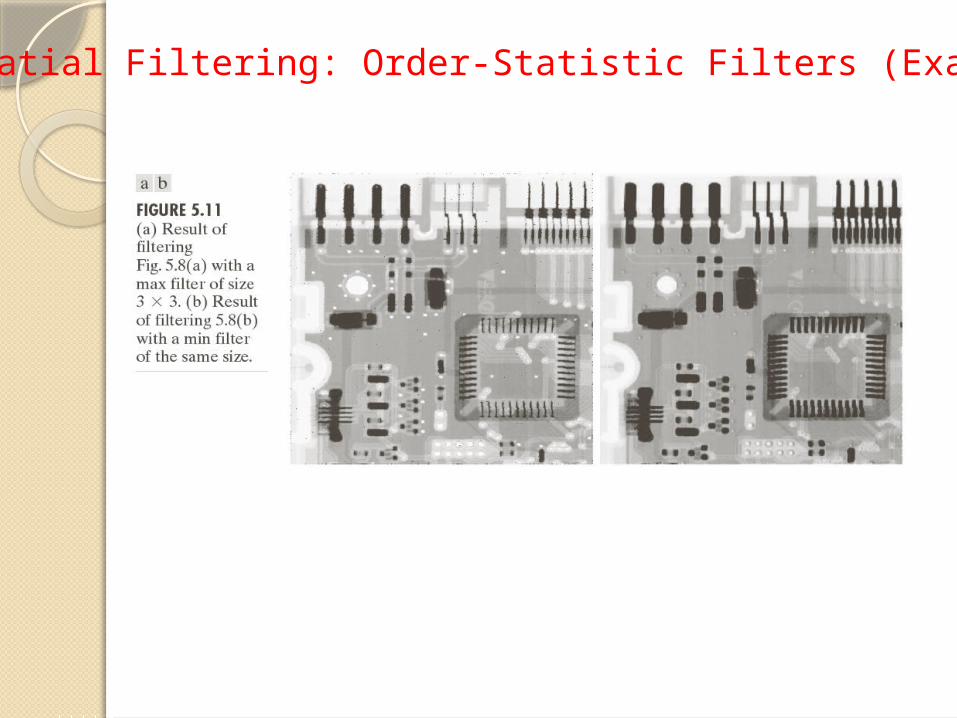
Spatial Filtering: Order-Statistic Filters (Example)
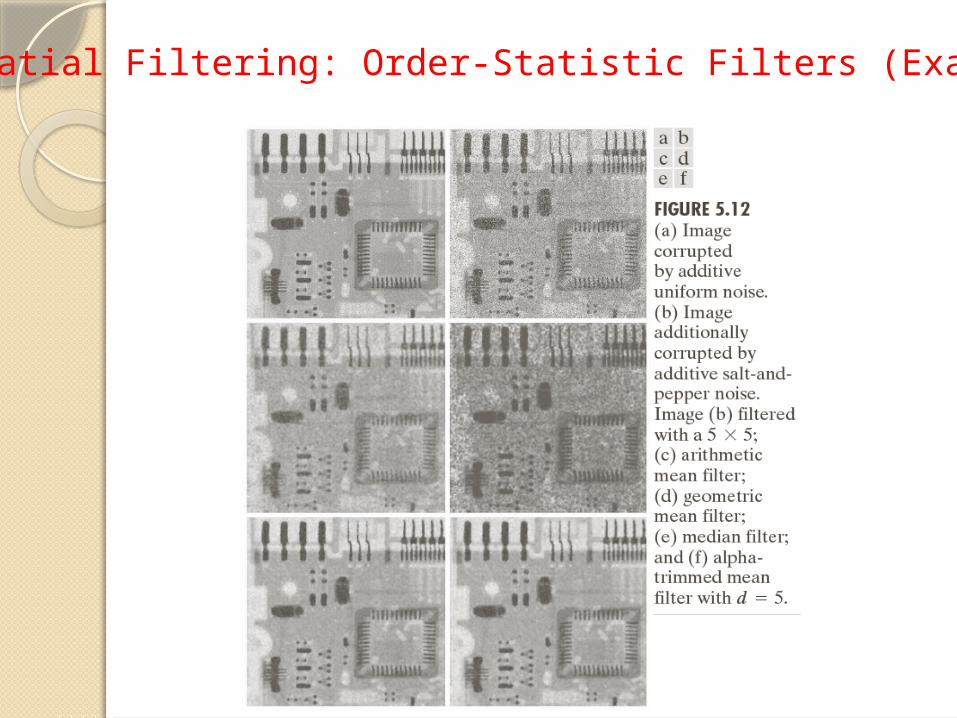
Spatial Filtering: Order-Statistic Filters (Example)
Spatial Filtering: Adaptive Filters
2
: local region
The response of the filter at the center point (x,y) of
is based on four quantities:
(a) ( , ), the value of the noisy image at ( , );
(b) , the variance of the noise corrupti
xy
xy
S
S
g x y x y
2
ng ( , )
to form ( , );
(c) , the local mean of the pixels in ;
(d) , the local variance of the pixels in .
L xy
L xy
f x y
g x y
m S
S
Adaptive, Local Noise Reduction Filters
2
2
The behavior of the filter:
(a) if is zero, the filter should return simply the value
of ( , ).
(b) if the local variance is high relative to , the filter
should return a value cl
g x y
ose to ( , );
(c) if the two variances are equal, the filter returns the
arithmetic mean value of the pixels in .xy
g x y
S
Spatial Filtering: Adaptive Filters
Adaptive, Local Noise Reduction Filters
2
2
An adaptive expression for obtaining ( , )
based on the assumptions:
( , ) ( , ) ( , ) LL
f x y
f x y g x y g x y m
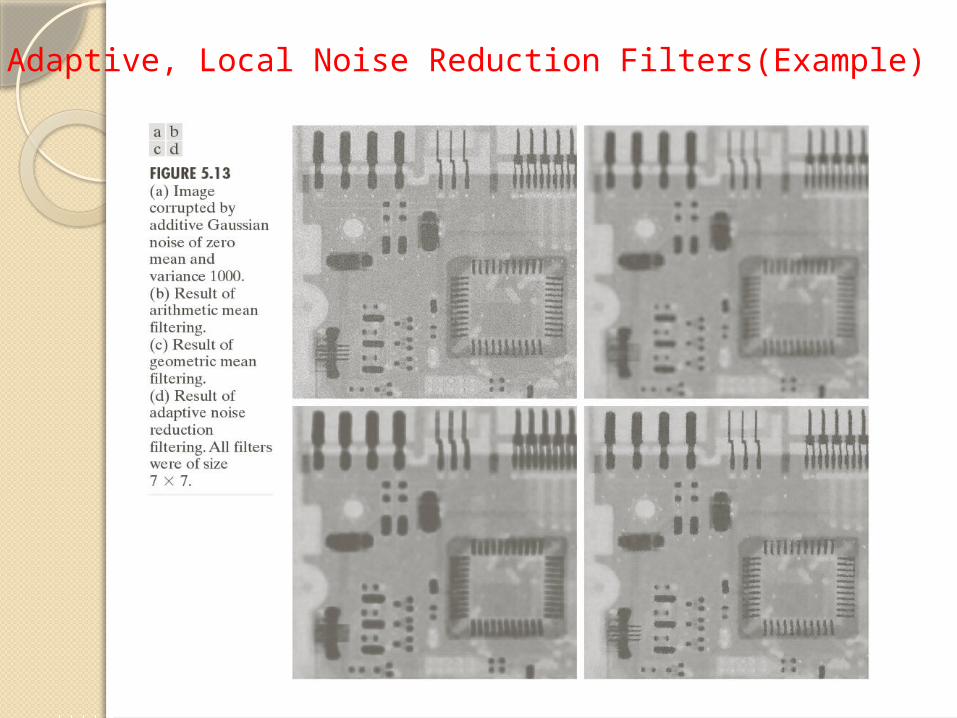
Adaptive, Local Noise Reduction Filters(Example)
Spatial Filtering: Adaptive Filters
Adaptive Median Filters
min
max
med
max
The notation:
minimum intensity value in
maximum intensity value in
median intensity value in
intensity value at coordinates ( , )
maximum all
xy
xy
xy
xy
z S
z S
z S
z x y
S
owed size of xyS
Spatial Filtering: Adaptive Filters
Adaptive Median Filters
med min med max
max
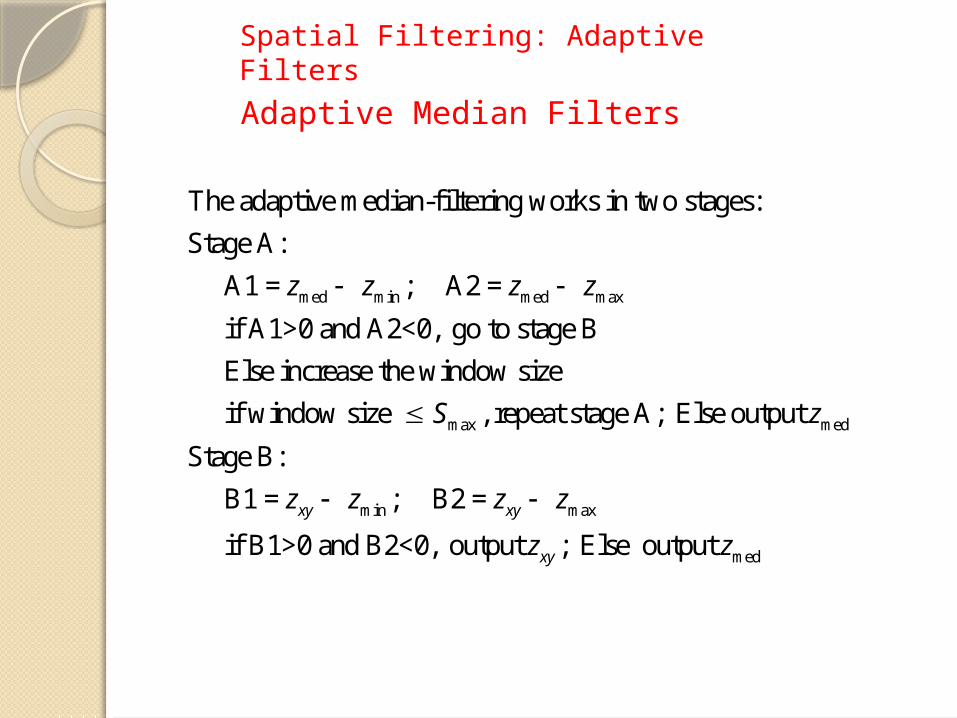
The adaptive median-filtering works in two stages:
Stage A:
A1 = ; A2 =
if A1>0 and A2<0, go to stage B
Else increase the window size
if window size , re
z z z z
S
med
min max
med
peat stage A; Else output
Stage B:
B1 = ; B2 =
if B1>0 and B2<0, output ; Else output
xy xy
xy
z
z z z z
z z
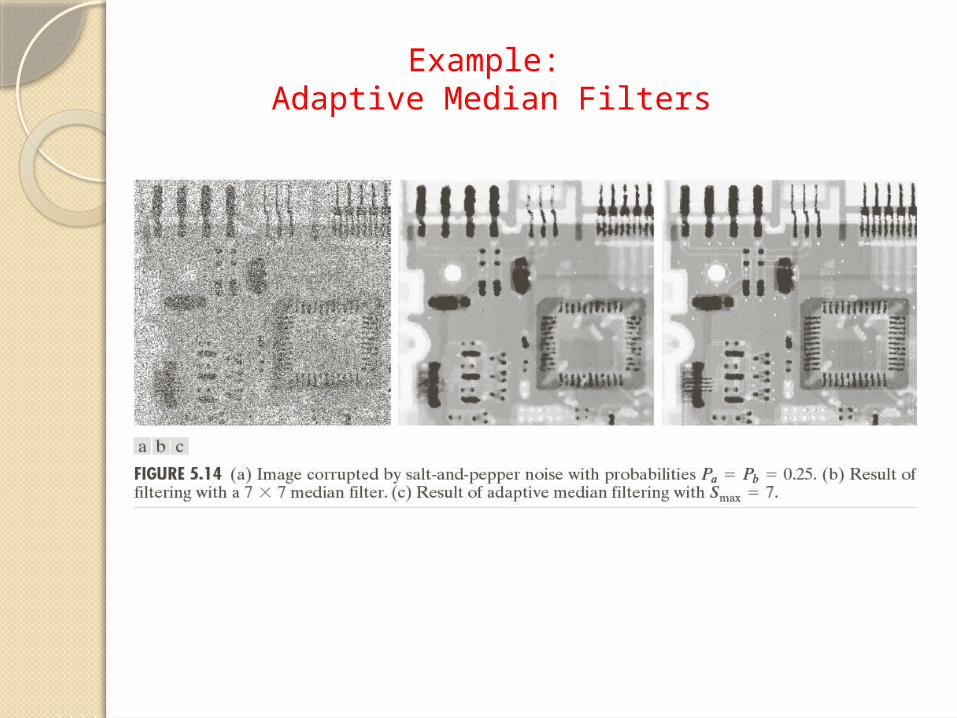
Example: Adaptive Median Filters

Periodic Noise Reduction by Frequency Domain Filtering
Periodic noise may occur if the imaging equipment (the acquisition or networking hardware) is subject to electronic disturbance of a repeating nature, such as be caused by electric motor.1. Band reject filtering
A filter consists of ones with a ring of zeros.
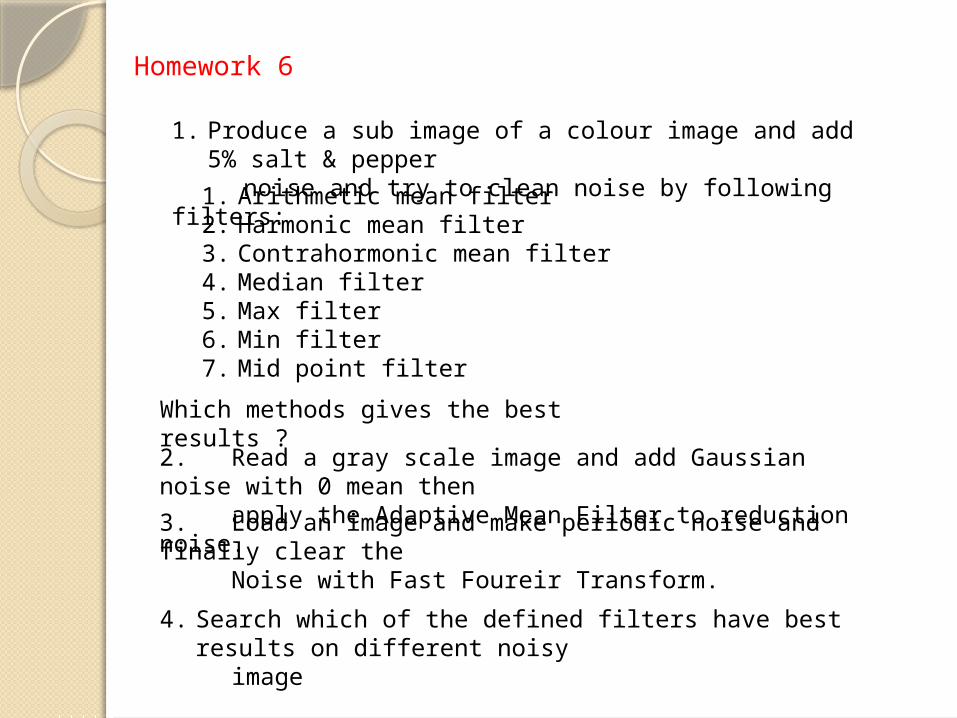
Homework 6
2. Read a gray scale image and add Gaussian noise with 0 mean then apply the Adaptive Mean Filter to reduction noise.
1. Produce a sub image of a colour image and add 5% salt & pepper
noise and try to clean noise by following filters:1. Arithmetic mean filter2. Harmonic mean filter3. Contrahormonic mean filter4. Median filter5. Max filter6. Min filter7. Mid point filter
Which methods gives the best results ?
3. Load an image and make periodic noise and finally clear the Noise with Fast Foureir Transform.
4. Search which of the defined filters have best results on different noisy
image





























