Embed Size (px)
Citation preview
![Page 1: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/1.jpg)
Digital Filter Structures• LTI Digital Systems are described by:-
– Input x[n] and output y[n] relationship.
– Constant coefficient difference equation.
– Impulse response h[n]. (Convolution sum)
– Frequency response,
– Transfer Function H(z).
• Realization of digital filters via convolution sum of input and impulse response is limited to finite impulse response ,FIR filters only.
• Both the IIR & FIR filters can be directly realized using any of the other forms as described above.
).( ωjeH
![Page 2: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/2.jpg)
Structural Representation via Block
Diagram
][b][ay[n]
-:equation differencet coefficienconstant Linear )2(
k]-h[k]x[nk]-x[k]h[ny[n]
-: sumn Convolutio (1)
-:bygiven are filters digital of iprelationshoutput input domain In time
0
k
1
k knxknyM
k
N
k
kk
−+−−=
==
∑∑
∑∑
==
∞
−∞=
∞
−∞=
![Page 3: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/3.jpg)
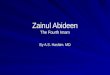
Block Diagram of FIR Digital Filters
][by[n]
-:equation differencet coefficienconstant Linear )2(
k]-h[k]x[ny[n]
-: sumn Convolutio From (1)
0
k
0
knxM
k
M
k
−=
=
∑
∑
=
=
1]1[ bh =0]0[ bh =
+
y[n]
x[n]D D D D D
2]2[ bh = 3]3[ bh =MbMh =][
![Page 4: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/4.jpg)
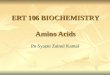
Block Diagram of IIR Filter
][b][ay[n]
-:equation differencet coefficienconstant Linear )2(
k]-h[k]x[nk]-x[k]h[ny[n]
samples). impulse infinite of becauseimplement toal(Impractic -: sumn Convolutio (1)
0
k
1
k knxknyM
k
N
k
kk
−+−−=
==
∑∑
∑∑
==
∞
−∞=
∞
−∞=
3a− 1a−
1b0b
+
y[n]
x[n]D D D D D
2b3b Mb
2a−1−− NaNa−
D D D D D
![Page 5: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/5.jpg)
Implementation of Digital Filters.
• Two ways of Actual Implementation.
– Via Software or computer programming.
– Or via Hardware construction
• Choice depends on application dictated by the sampling period or the Bandwidth/ Nyquist frequency.
![Page 6: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/6.jpg)
Equivalent Structures
• Transpose Operation
– Reverse all paths
– Replace pick-off nodes by adders and vice-
versa
– Interchange input and output nodes.
![Page 7: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/7.jpg)
Direct & Transposed Form of FIR
Digital Filters
1]1[ bh =0]0[ bh = 2]2[ bh =
+
y[n]
x[n]
3]3[ bh = MbMh =][
0]0[ bh =
yn]
x[n]
1]1[ −=− MbMhMbMh =][
+
2]2[ −=− MbMh
+ +1−
z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
![Page 8: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/8.jpg)
Drawback and Limitations of Direct
Form Implementations of Digital
Filters.• All coefficients, input/output and delayed
sequences cannot be represented in an infinite precision but limited to finite word length.
• Quantization of coefficients lead to finite word length effect.
• Finite word length effect due to the roundoff or truncation of coefficients will result in some form of error associated with the actual impulse response or frequency response of the filter required.
![Page 9: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/9.jpg)
Drawback and Limitations of Direct
Form Implementations of Digital
Filters.• Finite word length effect due to the
roundoff or truncation of output of multipliers will also contribute to some form of noise at the output of the filters.
• Furthermore overflow due to multiplications effect on stable IIR filters may result in them becoming unstable i.e. exhibits limit cycle oscillations.
![Page 10: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/10.jpg)
Reducing Drawback and
Limitations of Direct Form
Implementations of Digital Filters.
• Direct Form Implementations suffer from the worst effects due to finite word length.
• This leads us to other favorable forms such as cascade and parallel forms to reduce the effects of finite word length.
![Page 11: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/11.jpg)
Cascade Form of 4th order FIR
Digital Filter.
21β11β
1−z
+
x[n]
12β+
22β
h[0]1−
z 1−z1−
z
).1(]0[][)( 2
2
1
11
0
−−
==
− ++Π==∑ zzhzkhzH kk
P
k
N
k
k ββ
y[n]
![Page 12: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/12.jpg)
Parallel or Frequency-Sampling Structure For FIR Filters.
M
1
1−z
1−z
x[n]
1−z
1−z
2
10
2
or
ej
=
−
α
πα
Mje
/2πα
Mje
/)1(2 απ +
MMje
/)1(2 απ +−
)(αH
)1( α+H
)1( α+−MH
y[n]
+
+
+
+
∑−
=−+
−
−
+−=
1
01/)(2
2
1
)(1)(
M
kMkj
jM
ze
kH
M
ezzH
απ
πα α
![Page 13: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/13.jpg)
Block Diagram of Direct Form I, IIR Filter
][b][ay[n]
-:equation differencet coefficienconstant Linear
0
k
1
k knxknyM
k
N
k
−+−−= ∑∑==
3a− 1a−
1b0b
+
y[n]
x[n]D D D D D
2b3b Mb
2a−1−− NaNa−
D D D D D
![Page 14: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/14.jpg)
Block Diagram of Direct Form I, IIR Filter
N
N
M
M
kN
k
kM
k
kM
k
kN
k
kM
k
kN
k
kM
k
kN
k
M
k
N
k
zazaza
zbzbzbb
z
z
zX
zYzH
zzXzzY
zzXzzYzY
zzXzzY
knxkny
−−−
−−−
−
=
−
=
−
=
−
=
−
=
−
=
−
=
−
=
==
+++
+++=
+
==
=+
=+
+−=
−+−−=
∑
∑
∑∑
∑∑
∑∑
∑∑
.......1
.....
)a1(
b
)(
)()(
)(b)a1)((
)(b)(a)(
)(b)(aY(z)
-:equation above theof transform-z theTaking
][b][ay[n]
-:equation differencet coefficienconstant Linear
2
2
1
1
2
2
1
10
1
k
0
k
0
k
1
k
0
k
1
k
0
k
1
k
0
k
1
k
![Page 15: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/15.jpg)
Block Diagram of Direct Form I, IIR Filter
N
N
M
M
kN
k
kM
k
zazaza
zbzbzbb
z
z
zX
zYzH
−−−
−−−
−
=
−
=
+++
+++=
+
==
∑
∑
.......1
.....
)a1(
b
)(
)()(
2
2
1
1
2
2
1
10
1
k
0
k
3a− 1a−
1b0b
+
Y(z)]
X(z)
2b3b Mb
2a−1−− NaNa−
1−z
1−z 1−
z1−
z 1−z
1−z
1−z
1−z
1−z
1−z
![Page 16: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/16.jpg)
Example 8.3 Direct Form I, Realization
][b][ay[n]
-: tranform- Zinverse theTaking
]2.018.04.0)[(]02.0362.00.44z)[()(
]02.0362.00.44z)[(]2.018.04.01Y(z)[
2.018.04.01
02.0362.00.44z
X(z)
Y(z)
.2.018.04.01
02.0362.00.44z
2.018.04.0
02.0362.00.44zH(z)
-:asgiven isfunction transfer IIRorder A third
0
k
1
k
321321-
321-321
321
321-
321
321-
23
2
knxkny
zzzZYzzzXzY
zzzXzzz
zzz
zz
zzz
zz
zzz
z
M
k
N
k
−+−−=
−+−++=
++=−++
−++
++=
−++
++=
−++
++=
∑∑==
−−−−−
−−−−−
−−−
−−
−−−
−−
3a− 1a−
1b
+
y[n]
x[n]
2b3b
2a−
1−z
1−z
1−z
1−z
1−z
1−z
1−z
=0.44 =0.362 =0.02
=-0.4=-0.18
=0.2
![Page 17: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/17.jpg)
Block Diagram of Direct Form 1 IIR Filter
• We can treat the z-transform of the output as the product of :-
(1) z-transform of input
(2) Non recursive part transfer function.
(3) Recursive part transfer function
}
)a1(
1}{b){()(
1
k
0
k
kN
k
kM
k z
zzXzY−
=
−
=∑
∑+
=
![Page 18: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/18.jpg)
Block Diagram of Direct Form 1 IIR Filter
3a−
1a−1b
0bY(z)
X(z)
2b
3b
Mb
2a−
4a−
Na−
+
+
+
+
+
+
+
+
+
+
+
+
4b
1−z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
Non-Recursive Part Recursive Part
![Page 19: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/19.jpg)
Block Diagram of Direct Form 1 Transpose IIR Filter
3a−
1a−1b
0b
Y(z)
X(z)
2b
3b
Mb
2a−
4a−
Na−
+
+
+
+
+
+
+
+
+
+
+
4b
1−z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
Recursive Part Non-Recursive Part
![Page 20: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/20.jpg)
Block Diagram of Non-canonic Direct Form 1 IIR Filter
3a−
1a−1b
0by[n]
x[n]
2b
3b
Mb
2a−
4a−
Na−
+
+
+
+
+
+
+
+
+
+
+
+
4b
1−z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
1−z
![Page 21: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/21.jpg)
Block Diagram of Canonic Direct Form II, IIR Filter
3a−
1a−1b
0by[n]
x[n]
2b
3b
Mb
2a−
4a−
Na−
+
+
+
+
+
+
+
+
+
+
+
+
4b
1−z
1−z
1−z
1−z
1−z
![Page 22: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/22.jpg)
Example 8.3 Block Diagram of Canonic Direct Form II, IIR Filter
2.03 =− a
4.01 −=− a 44.01 =b
y[n]
x[n]
362.02 =b
02.03 =b
18.02 −=− a
+
+
+
+
+
+
+
1−z
1−z
1−z
321
321-
321
321-
23
2
2.018.04.01
02.0362.00.44z
X(z)
Y(z)
.2.018.04.01
02.0362.00.44z
2.018.04.0
02.0362.00.44zH(z)
-:asgiven isfunction transfer IIRorder A third
−−−
−−
−−−
−−
−++
++=
−++
++=
−++
++=
zzz
zz
zzz
zz
zzz
z
![Page 23: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/23.jpg)
Cascade Realizations
sections.order first for 0&..).........1
1()(
sections.order second..).........1
1()(
).s(sectionspolynomialorder secondor first are)()(
)(
)(.......
)(
)(
)(
)(
)(
)(
)(
)()(
221
1
1
1
10
2
2
1
1
2
2
1
1
10
2
3
2
2
1
1
=+
+Π=
++
++Π=
==
−
−
=
−−
−−
=
kk
k
kM
k
kk
kkM
k
kk
M
M
z
zpzH
zz
zzpzH
zDandzPWhere
zD
zP
zD
zP
zD
zP
zD
zP
zX
zYzH
αβα
β
αα
ββ
)(
)(
1
1
zD
zP
)(
)(
2
2
zD
zP
)(
)(
3
3
zD
zP
)(
)(
zD
zP
M
M
Via different poles & zeros pairing, there are other realizations.
X(z) Y(z)
![Page 24: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/24.jpg)
Cascade Realizations
sections.order first for 0&
sections.order second..).........1
1()(
22
2
2
1
1
2
2
1
1
10
=
++
++Π=
−−
−−
=
kk
kk
kkM
k zz
zzpzH
αβ
αα
ββ
1−z
1−z
+
+ +
+
k1α−
k2α−
k1β
k2β
)(zX k
)(zYk
![Page 25: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/25.jpg)
Example 8.4 Cascade Canonic Direct Form II, Realization
)4.01
)(5.08.01
02.0362.00.44(
2.018.04.01
02.0362.00.44z
X(z)
Y(z)
.2.018.04.01
02.0362.00.44z
2.018.04.0
02.0362.00.44zH(z)
-:asgiven isfunction transfer IIRorder A third
1
1
21
21
321
321-
321
321-
23
2
−
−
−−
−−
−−−
−−
−−−
−−
−++
++=
−++
++=
−++
++=
−++
++=
z
z
zz
zz
zzz
zz
zzz
zz
zzz
z
1−z
1−z
+
+ +
+
8.01 −=− kα
5.02 −=− kα
362.01 =kβ
02.02 =kβ
)(zX
)(zY
44.00 =kβ1−
z
+
+
4.01 =− kα
![Page 26: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/26.jpg)
Parallel Form I Realizations of IIR Filters
pole. realfor 0 .)1
()(
)()(
poles. simple assume function, transfer theofexpansion fraction partial Via
21
1 12
2
1
1
1
1000 ==
++
++=+= ∑ ∑
= =−−
−
kk
M
k
M
k kk
kk
k
k
zz
z
zD
zNzH αγ
αα
γγγγ
)(zX
0γ
)(
)(
1
1
zD
zN
)(
)(
2
2
zD
zN
)(
)(
zD
zN
M
M
+
+
+
)(zY
![Page 27: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/27.jpg)
Parallel Form I Realizations of IIR Filters
pole. realfor 0 .)1
()(
poles. simple assume function, transfer theofexpansion fraction partial Via
21
12
2
1
1
1
100 ==
++
++= ∑
=−−
−
kk
M
k kk
kk
zz
zzH αγ
αα
γγγ
1−z
1−z
+
+
+
k1α−
k2α−
k1γ
k0γ)(zYk
![Page 28: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/28.jpg)
Example 8.5 Parallel Form I Realizations of IIR Filters
21
1
1-
1
1
21
21
321
321-
23
2
5.08.01
2.05.0
0.4z-1
0.6-0.1H(z)
-:expansionfraction partial Via
)4.01
)(5.08.01
02.0362.00.44(.
2.018.04.01
02.0362.00.44z
2.018.04.0
02.0362.00.44zH(z)
-:asgiven isfunction transfer IIRorder A third
−−
−
−
−
−−
−−
−−−
−−
++
−−++=
−++
++=
−++
++=
−++
++=
zz
z
z
z
zz
zz
zzz
zz
zzz
z
1−z
1−z
+
+
+
8.01 −=− kα
5.02 −=− kα 2.01 −=kγ
5.00 −=kγ
)(zY
1−z
+ +
0.4
-0.1
0.6X(z)
![Page 29: Digital Filter Structures - Universiti Tenaga Nasionalmetalab.uniten.edu.my/~zainul/images/dsp/Microsoft PowerPoint... · Drawback and Limitations of Direct ... IIR Filter y[n] a](https://reader031.pdfslide.us/reader031/viewer/2022030411/5a9dc8667f8b9a42488d4666/html5/thumbnails/29.jpg)
Other Structures.
• FIR Systems Cascaded Lattice Structures.
• Lattice and Lattice-Ladder Structures for IIR Systems.