Embed Size (px)
Citation preview
DIGIT VIDEO SYSTEMS
A. ASTAPKOVICH
State University of Aerospace Instrumentations , Saint-Petersburg, 2012
Lecture 0
COURSE REVIEW
GOAL OF THE COURSE
Establishing the understanding of the basic principals of digit video systems :
digit video processing cycle;
structure of the modern digit video systems ;
applications in multimedia, industrial, security, research ; review of the modern research activities ;
Course structure
PHYSICAL PRINCIPALS OF THE DIGIT FRAME FORMING AND HARDWARE/SOFTWARE REALIZATIONS
MODERN APPLICATIONS: MULTIMEDIA STANDARTS,
DIGIT VIDEO FOR INDUSTRY AND SPACE RESEARCH
DIGIT VIDEO PROCESSING BASICS
REVIEW OF MODERN RESEARCH ACTIVITY
TOPIC 1. PHYSICAL AND REALIZATION BACKGROUD
Lecture 1. DIGIT CAMERA § 1. Digit frame forming § 2. Noise and distortions in digit video § 3. Low level processing § 4. High level processing
§ 5. Structure of the modern digit video camera
Lecture 2. DIGIT VIDEO § 1. Digit video in multimedia
§ 2. Multimedia standards review § 3. Digit video in industry and space applications § 4. Modern silicon solutions § 5. System architecture and high level software
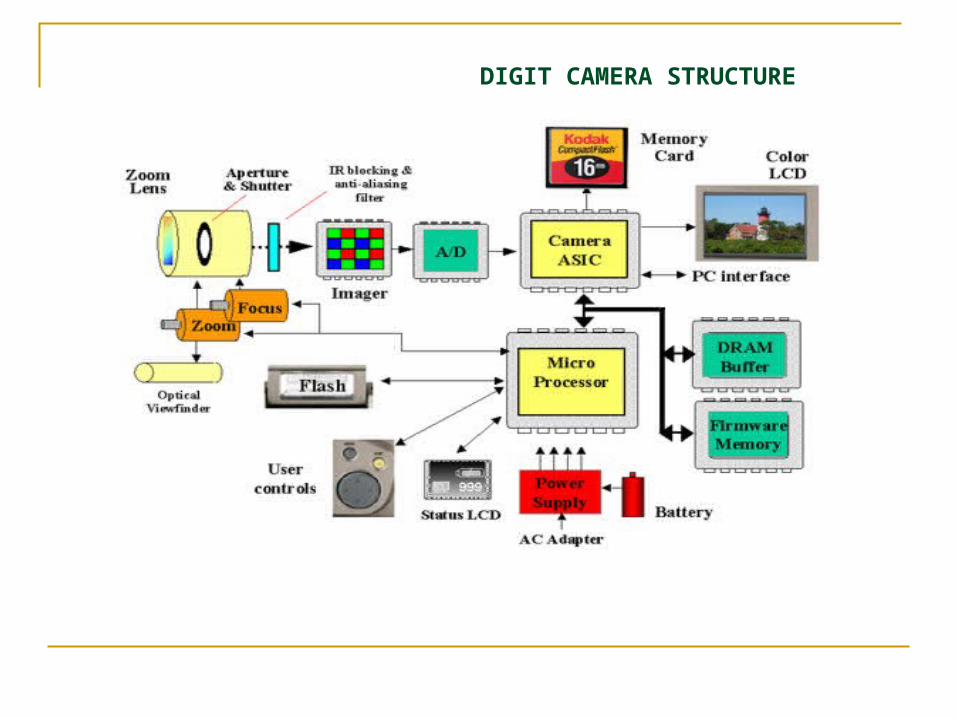
DIGIT CAMERA STRUCTURE
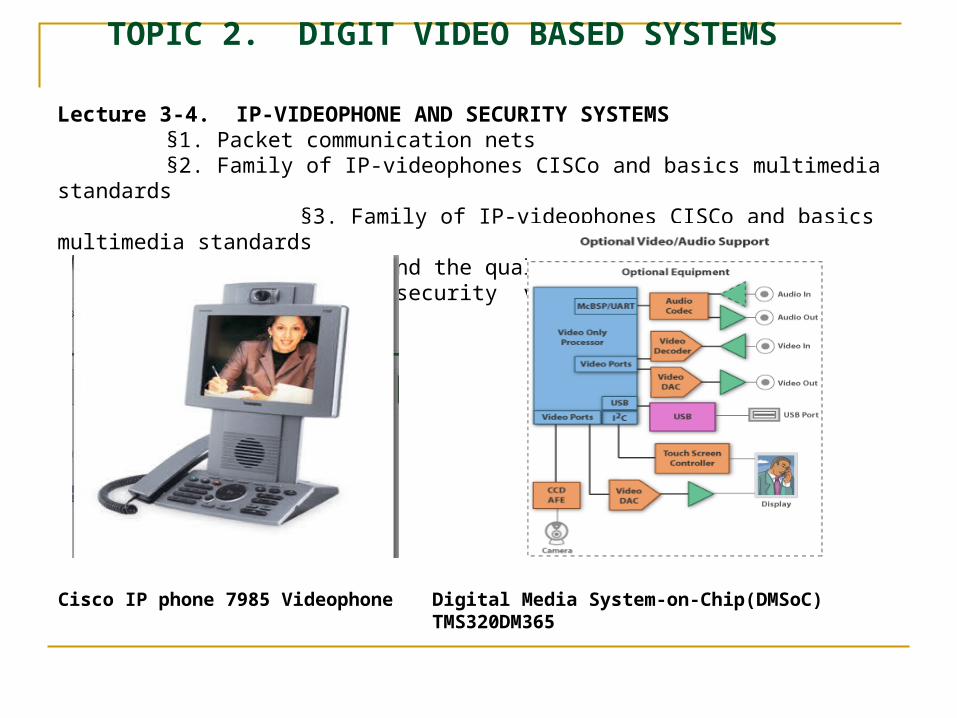
Lecture 3-4. IP-VIDEOPHONE AND SECURITY SYSTEMS §1. Packet communication nets §2. Family of IP-videophones CISCo and basics multimedia
standards §3. Family of IP-videophones CISCo and basics multimedia standards
§4. Audio codec and the quality of the videophones §5. Multichannel security video systems
TOPIC 2. DIGIT VIDEO BASED SYSTEMS
Cisco IP phone 7985 Videophone Digital Media System-on-Chip(DMSoC) TMS320DM365
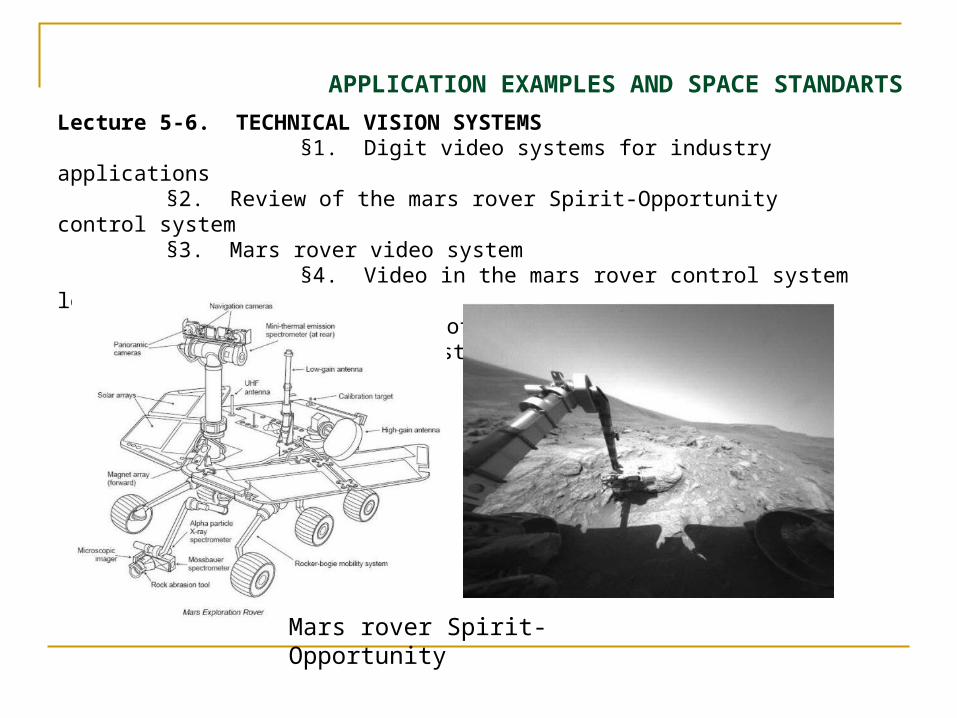
Lecture 5-6. TECHNICAL VISION SYSTEMS §1. Digit video systems for industry applications
§2. Review of the mars rover Spirit-Opportunity control system
§3. Mars rover video system §4. Video in the mars rover control system loop
§5. Special features of the digit channel §6. Space standards of ECSS
Mars rover Spirit-Opportunity
APPLICATION EXAMPLES AND SPACE STANDARTS
TOPIC 3. DIGIT IMAGE PROCESSING
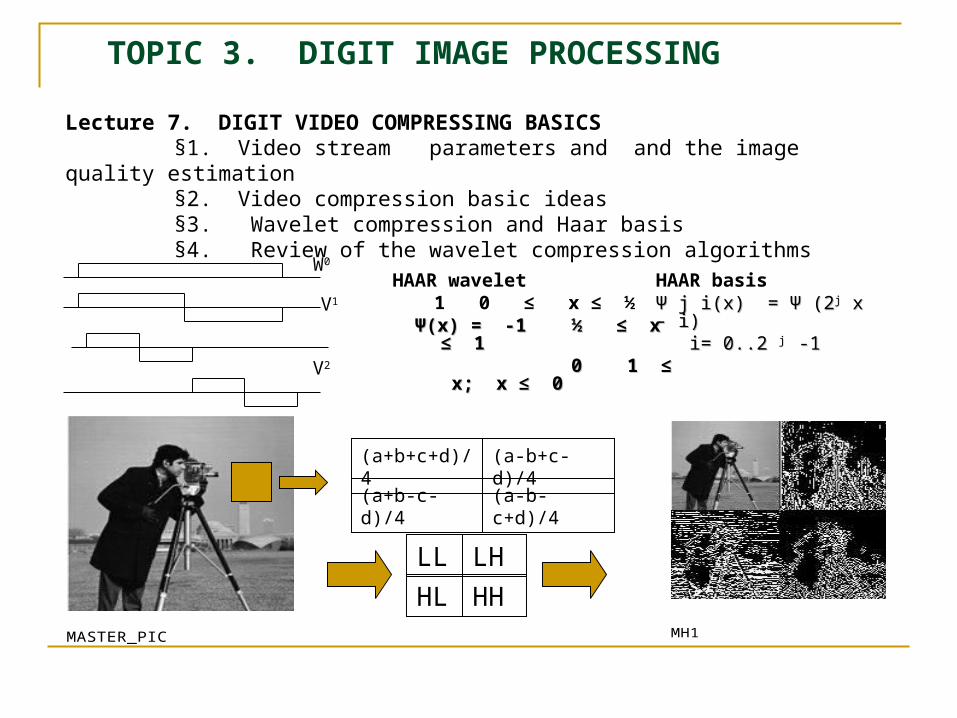
Lecture 7. DIGIT VIDEO COMPRESSING BASICS §1. Video stream parameters and and the image quality
estimation §2. Video compression basic ideas §3. Wavelet compression and Haar basis §4. Review of the wavelet compression algorithms
HAAR wavelet1 0 ≤ x ≤ ½
Ψ(Ψ(xx) =) = -1 ½ ≤ -1 ½ ≤ x x ≤ 1≤ 1 0 1 ≤ 0 1 ≤ x; x; x x ≤ ≤ 00
HAAR basisΨ Ψ j ij i((xx) ) = = Ψ (Ψ (22jj x - i x - i) ) i= 0..2 i= 0..2 j j -1-1
MASTER_PIC MH1
(a+b+c+d)/4 (a-b+c-d)/4
(a+b-c-d)/4 (a-b-c+d)/4
LL LH
HL HH
W0
V1
V2
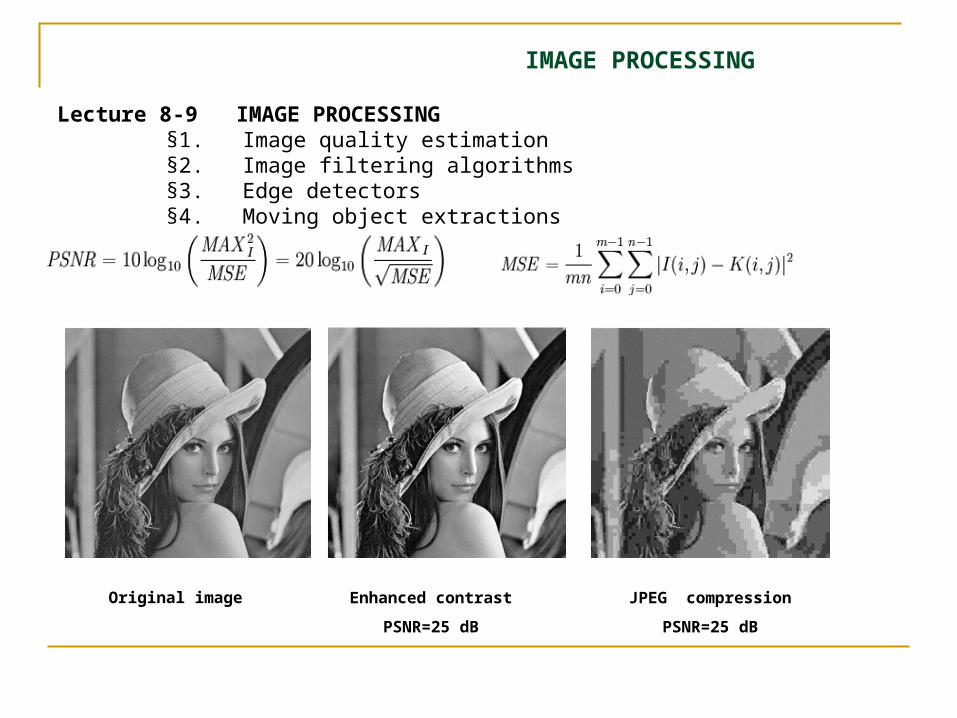
Lecture 8-9 IMAGE PROCESSING §1. Image quality estimation §2. Image filtering algorithms §3. Edge detectors §4. Moving object extractions
IMAGE PROCESSING
Original image Enhanced contrast
PSNR=25 dB
JPEG compression
PSNR=25 dB
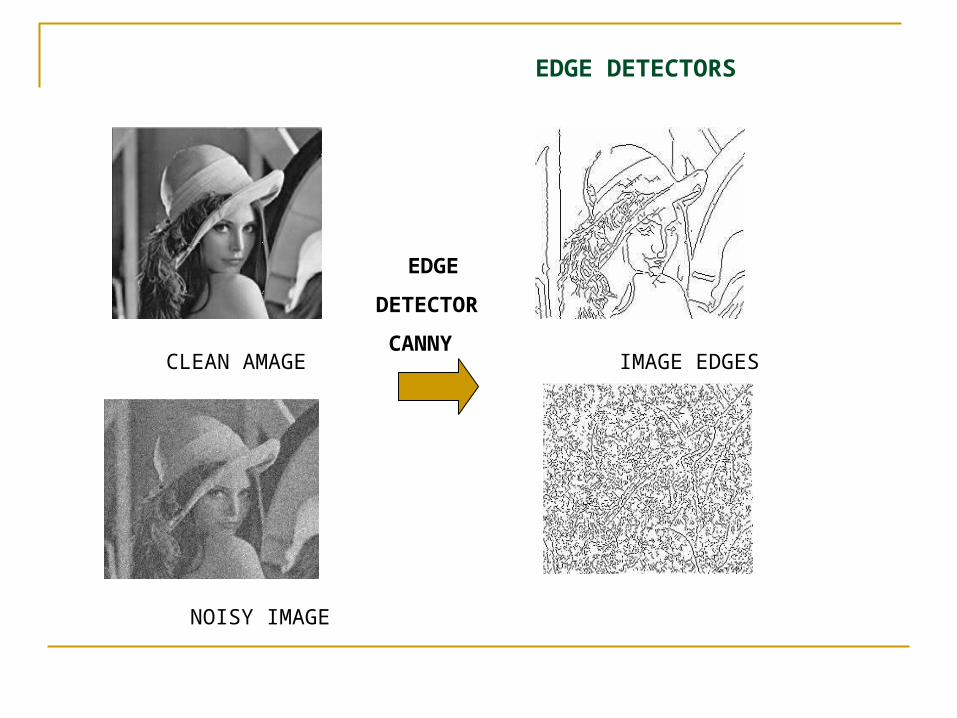
EDGE DETECTORS
CLEAN AMAGE
NOISY IMAGE
IMAGE EDGES
EDGE
DETECTOR
CANNY
DIGIT VIDEOSTREAM PROTECTION
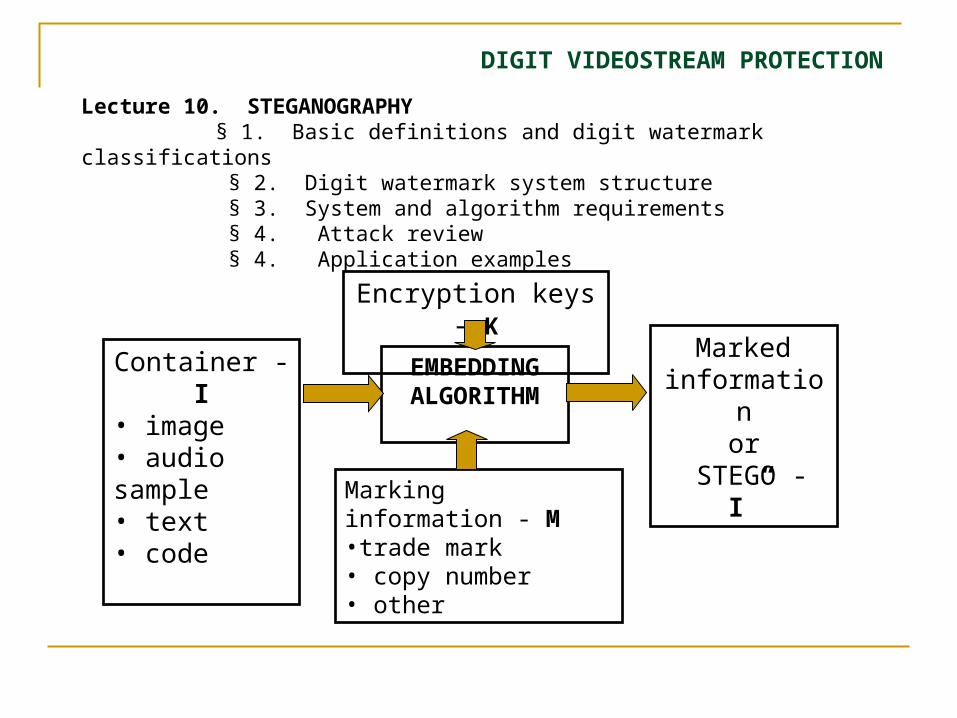
Lecture 10. STEGANOGRAPHY § 1. Basic definitions and digit watermark classifications § 2. Digit watermark system structure § 3. System and algorithm requirements § 4. Attack review § 4. Application examples
Encryption keys -
K Container - I
• image• audio sample• text• code
Marking information - M•trade mark• copy number• other
EMBEDDINGALGORITHM
Marked information
or STEGO - I”
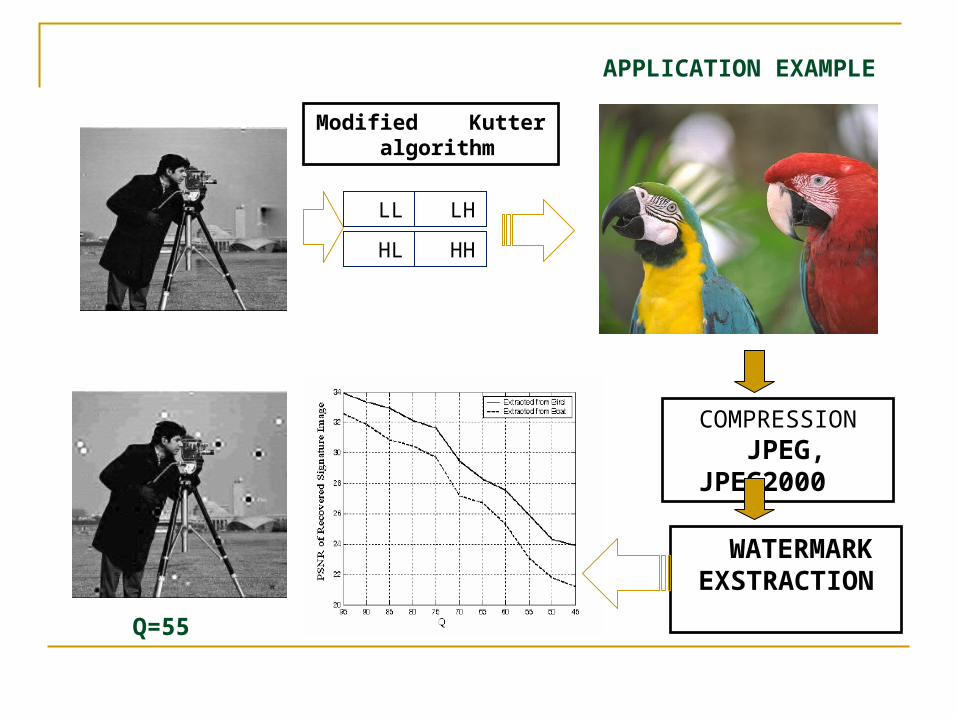
LL LH
HL HH
Q=55
COMPRESSION JPEG,
JPEG2000
WATERMARKEXSTRACTIO
N
APPLICATION EXAMPLE
Modified Kutter algorithm
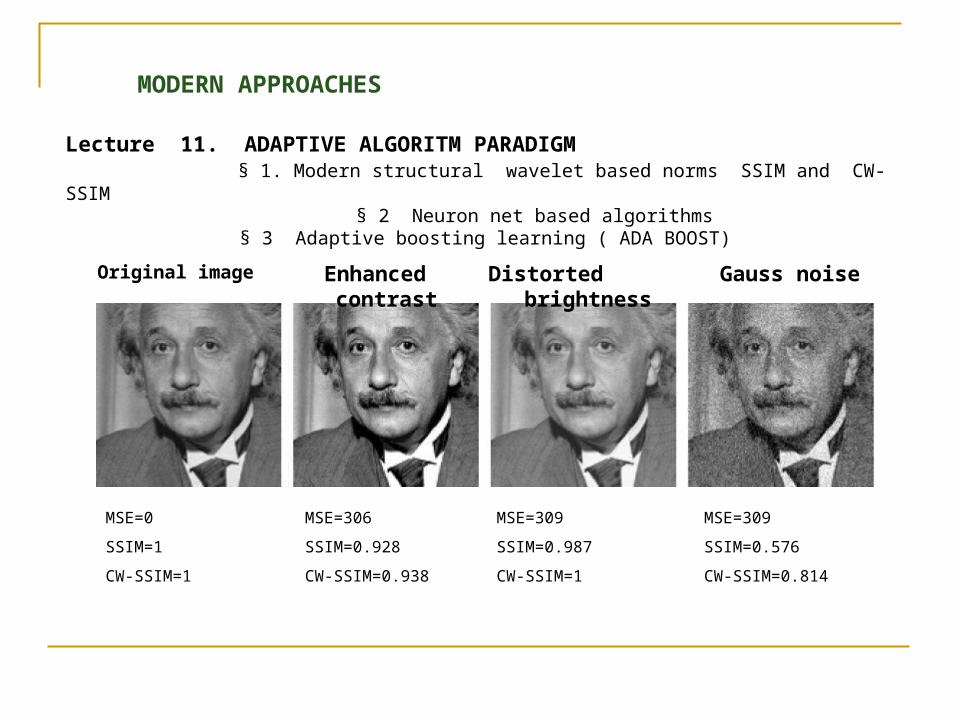
MODERN APPROACHES
Lecture 11. ADAPTIVE ALGORITM PARADIGM § 1. Modern structural wavelet based norms SSIM and CW-SSIM
§ 2 Neuron net based algorithms § 3 Adaptive boosting learning ( ADA BOOST)
Original image
MSE=0
SSIM=1
CW-SSIM=1
MSE=306
SSIM=0.928
CW-SSIM=0.938
Enhanced contrast Distorted brightness
MSE=309
SSIM=0.987
CW-SSIM=1
Gauss noise
MSE=309
SSIM=0.576
CW-SSIM=0.814
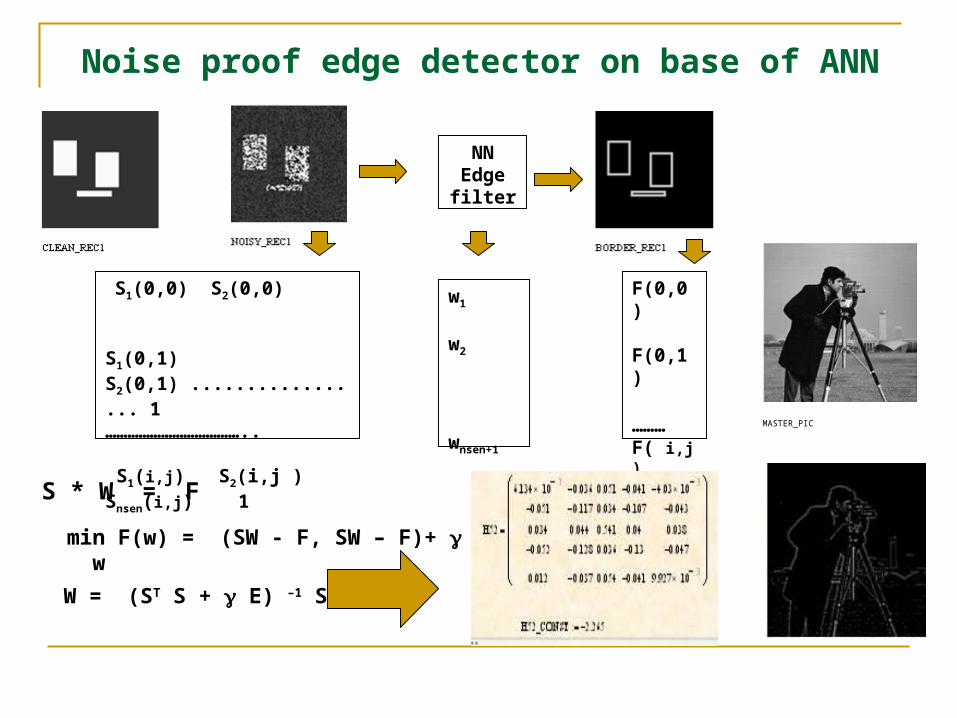
Noise proof edge detector on base of ANN
S1(0,0) S2(0,0)
S1(0,1) S2(0,1) ................. 1……………………………….. S1(i,j) S2(i,j ) Snsen(i,j) 1
w1
w2
wnsen+1
F(0,0)
F(0,1)
………F( i,j)
W = (ST S + E) –1 ST F
min F(w) = (SW - F, SW – F)+ (W,W) w
S * W = F
NNEdgefilter
MASTER_PIC