Embed Size (px)
Citation preview

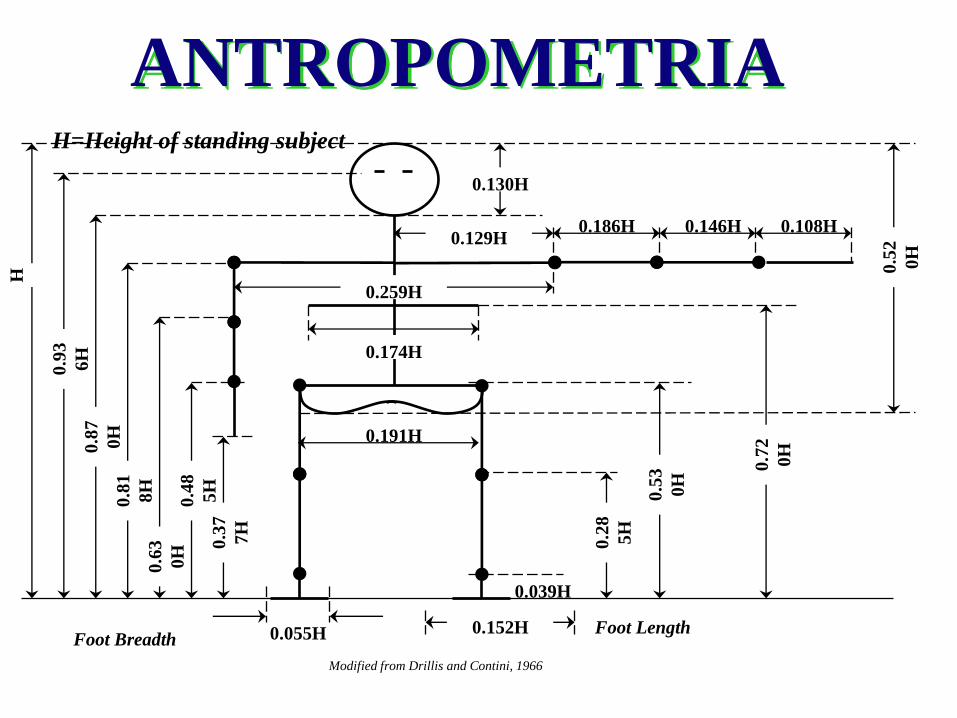
H=Height of standing subject
Modified from Drillis and Contini, 1966
Foot Breadth Foot Length
0.129H 0.186H 0.146H 0.108H
0.174H
H
0.9
3
6H
0.8
7
0H
0.8
1
8H
0.6
3
0H
0.4
8
5H
0.3
7
7H
0.152H 0.055H
0.2
8
5H
0.5
3
0H
0.7
2
0H
0.5
2
0H
0.130H
0.259H
0.191H
0.039H
ANTROPOMETRIA

SCOPO: conoscere le forze che si esercitano nelle varie parti del corpo umano per diverse posture, in condizioni statiche.
Cioè saper rispondere a domande del tipo:
qual’ `e la forza che i muscoli estensori del collo devono esercitare sulla testa per
sostenerla in una certa posizione?
Quando una persona si flette, qual’ `e la forza esercitata sulle vertebre?
Come varia la forza esercitata sulla testa del femore al variale dei carichi portati in
una mano?
Come varia la forza esercitata sull’articolazione del gomi to (del ginocchio) al variare
della posizione del braccio (delle gambe) e delle forze applicate?
! studiare le forze che nascono nella zona articolare (reazioni dell’articolazione e forze
muscolari) per assicurare l’equilibrio di una parte del corpo
IPOTESI DI LAVORO

Articolazioni e muscoli
• Ipotesi e limitazioni
• Meccanica del gomito
• Meccanica della spalla
• Meccanica della colonna vertebrale
• Meccanica dell’anca
• Meccanica del ginocchio
• Meccanica della caviglia
VINCOLI

assicurano mobilità e stabilità a diversi livelli (es. spalla/gomito).
Classificazione in base a struttura - funzione:
• sinartrosi: ogni tipo di articolazione che si realizza per continuità dei
segmenti ossei, tipicamente con l’interposizione di connettivo fibroso
(suture e indesmosi), con la presenza di cartilagine ialina (sincondrosi) o
di tessuto osseo (sinostosi). Si tratta di una categoria di articolazioni che
non consentono apprezzabili movimenti (es. cranio).
• anfiartrosi: articolazione nella quale le superfici o i margini ossei
adiacenti sono uniti da cartilagine fibrosa, in modo tale che i movimenti
siano limitati e non vi sia contatto tra le ossa (es. vertebre).
ARTICOLAZIONI

• diartrosi: tipo di articolazione in cui i capi ossei sono separati
da una cavità articolare (6). Gli estremi scheletrici, che hanno una
forma non rigorosamente complementare, sono rivestiti di
cartilagine articolare (5) (di regola cartilagine ialina). I capi
articolari sono avvolti e tenuti insieme da una capsula fibrosa (2).
Questa si inserisce lungo il perimetro della cartilagine a guisa di
manicotto, e presenta la superficie interna rivestita da una
membrana sinoviale (3), la quale secerne il liquido omonimo (4),
adatto a lubrificare le superfici a contatto e a nutrire la cartilagine
articolare, che è priva di vasi.
La guaina è esternamente rinforzata da legamenti periarticolari,
inseriti sulle superfici ossee contigue.
A. DIARTRODIALI
• diartrosi: tipo di articolazione in cui i capi ossei sono
separati da una cavità articolare (6). Gli estremi
scheletrici, che hanno una forma non rigorosamente
complementare, sono rivestiti di cartilagine articolare (5)
(di regola cartilagine ialina). I capi articolari sono avvolti e
tenuti insieme da una capsula fibrosa (2). Questa si
inserisce lungo il perimetro della cartilagine a guisa di
manicotto, e presenta la superficie interna rivestita da una
membrana sinoviale (3), la quale secerne il liquido
omonimo (4), adatto a lubrificare le superfici a contatto e
a nutrire la cartilagine articolare, che `e priva di vasi.
La guaina `e esternamente rinforzata da legamenti
periarticolari, inseriti sulle superfici ossee contigue. In
alcune situazioni si ha la presenza di un disco articolare
fibrocartilagineo o menisco, inserito perifericamente alla
parete della capsula.

Vogliamo risolvere con gli strumenti della statica del corpo rigido un
problema di equilibrio le cui incognite sono la trazione nei muscoli e le
forze di reazione sulle articolazioni (forze interne), mentre sono note la
forza di gravità, i carichi applicati durante esercizi, i carichi applicati da
protesi (forze esterne).
La risoluzione di questo problema è generalmente molto complicata. Si debbono conoscere: • le direzioni di azione delle forze muscolari coinvolte • i punti di applicazione dei gruppi muscolari coinvolti • il peso delle parti di corpo interessate • la posizione del baricentro delle parti di corpo interessate • gli assi di rotazione delle articolazioni
DEFINIZIONE DEL
PROBLEMA

LINEE DI FORZA

si scelgono muscoli principali responsabili del controllo
sull’articolazione
• si suppongono noti i punti di applicazione dei muscoli
• si suppongono note le direzioni di applicazione delle forze muscolari
• si suppongono noti gli assi di rotazione delle articolazioni
• si suppongono noti i pesi e i baricentri delle parti di corpo in studio
• si trascura l’attrito nelle articolazioni
• si trascura l’aspetto dinamico del problema
• si considerano problemi bidimensionali
Applicazione della statica: Modello meccanico del sistema biologico in considerazione Applicazione delle equazioni cardinali della statica
VALUTAZIONE DELLE
FORZE IN GIOCO


- Forze e Momenti - Gradi di libertà - Spostamento velocità accelerazioni - Inerzia - Leggi di equilibrio
STRUMENTI DI LAVORO

Prima legge di newton
• o legge dell’inerzia: Ogni corpo conserva il suo stato di quiete o di moto uniforme e lineare fintanto che le forze esterne applicate non variano questo stato.

Seconda legge di Newton
O legge della accelerazione • La forza applicata ad un corpo causa una accelerazione di quel corpo di una
grandezza proporzionale alla forza nella direzione della forza ed inversamente proporzionale alla massa del corpo.
F = ma CURVA FORZA-VELOCITA’

MOMENTO DELLA FORZA
• Se una forza passa attraverso il centro di gravità di un oggetto,ci sarà uno spostamento lineare di quell’oggetto. • Se una forza non passerà attraverso il centro di gravità si creerà un momento della forza. • E’ definibile come il prodotto della forza per la distanza perpendicolare dalla linea di azione di quella forza all’asse di rotazione.

APP. MUSCO-SCHELETRICO
Che fare -Valutare forze esercitate dai muscoli -Valutare forze di reazione e i momenti Come: -Leggi fisiche di equilibrio tra forze e momenti
-Metodi matematici per ridurre la complessità (ottimizzazione e riduzione).
-Considerare condizioni particolari

DIRETTO
F(t) SF= m(d2r/dt2) r(t)
Misura delle Forze
Equazione del moto
Doppia Integrazione
Spostamento

VALUTAZIONE FORZA
Scelte di lavoro: Per talune applicazioni la deformazione che subisce il sistema m-s vengono trascurate
Le forze interne sono di difficilissima misura Processo della stima delle F.I.
Le variazioni di moto sono più accessibili
Utilizzo di METODI INVERSI: - Forze - Momenti

DIRETTO vs INVERSO
r(t) SF= m(d2r/dr2) F(t)
Misura degli spostamenti (lineari e/o angolari)
Equazione del Moto
Doppia Differenziazzione
Forze
d2/dt2
F(t) SF= m(d2r/dt2) r(t)
Misura delle Forze
Equazione del moto
Doppia Integrazione
Spostamento

Corso di Biomeccanica AA 2009-10

TIPI DI FORZE INTERNE:
- Generate dall’attivazione muscolare - Ottenute dalla reazione di tendini e legamenti
ESTERNE:
- inerziali causate da cambi di accelerazione su massa -Carichi esterni

Per calcolare bene le forze interne: - Descrizione completa del movimento - Dati Antropometrici - Conoscenza delle forze esterne
FJy
FJx O SMO

STIMA DELLA FORZA -Conoscendo la Area di sezione trasversa del muscolo
- (Physiological Cross Sectional Area)
Relazione Lunghezza-Forza La lunghezza iniziale definisce il n° siti di legame acto-miosinici
Relazione Carico-Velocità La velocità di accorciamento dipende dal carico - Relazione Forza-Tempo La forza esercitata è funzione dei tempi di attivazione ANCORA Pre-stretching, temperatura, fatica

MASSE MUSCOLARI Ci sono vari metodi.
Alcuni misurano “elementi” metabolizzati solo dal tessuto muscolare.
Metodo della creatinina. La creatina è contenuto per il 98% dal m. Metodi per la stima del K attraverso l’emissione di raggi dal suo radioisotopo. Il K+ è contenuto per il 90% nel tessuto non adiposo Spettroscopia. Analisi frequenziale della risposta del tessuto ad una sollecitazione magnetica
Altri invece utilizzano tecniche di imaging
Tomografia computerizzata.
Risonanza magnetica

LUNGHEZZA-FORZA

CARICO -VELOCITA’
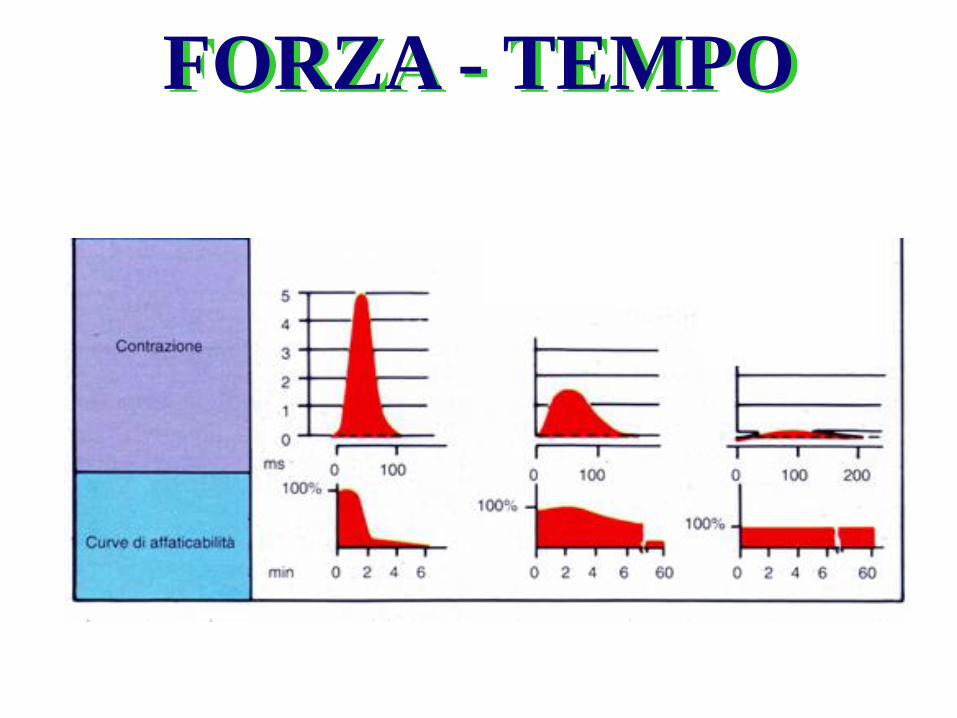
FORZA - TEMPO

NELLA REALTÀ
Le forze che agiscono su muscoli e articolazioni sono maggiori di quelle esercitati dai carichi.
momenti azione stabilizzatrice
Spesso, la formulazione per la determinazione di forze e momenti è un sistema indeterminato.
Riduzione Ottimizzazione.

DIRETTO
F(t) SF= m(d2r/dt2) r(t)
Misura delle Forze
Equazione del moto
Doppia Integrazione
Spostamento

RIDUZIONE
SCOPO: aumentare la conoscenza degli elementi in gioco, così da ridurre I gradi di possibilità
Trascurando effetti di alcuni muscoli Raggruppando contributo di muscoli sinergici
OPPURE
Incrementare il numero di equazioni che descrivono il sistema
p.e. definendo contributi percentuali
N.B: tutto ciò possibile SOLO compatibilmente con ANATOMIA E FISIOLOGIA! La semplificazione può portare a risultati improbabili.

OTTIMIZZAZIONE
LA FORMULAZIONE DEVE SODDISFARE ALCUNI CRITERI DI MERITO
- Minimizzare la spesa energetica - Massimizzare la velocità - Minimizzare il trasferimento energetico tra muscolo e tendini nelle catene articolari (minimization of pain)
I risultati dell’ottimizzazione sono testati a verificare vche siano compatibili

COME OTTIMIZZARE - Definire la funzione da minimizzare (obiettivo dello studio; p.e. spesa energetica, forze muscolari) - Vincoli (equazione di equilibrio forze e/o momenti) - Definizione delle incognite (forze) - Definizione dei range di validità della soluzione
Statistica
Informatica
e…….

MINIMIZZARE LE FORZE
Linear Approach (Total Muscle Force)
Per come siamo “congegnati”, saranno applicate le forze necessarie e sufficienti (ma niente di più) di quelle che servono al movimento
Tipicamente, tale approccio tende a massimizzare contributo di muscoli agenti sulle leve più lunghe
INCONSISTENZA con fisiologia

MASSIMO STRESS
Metodo lineare con vincoli
Ciascun muscolo ha un suo massimo carico.
Assunzione: - Un muscolo inizia a attivarsi solo quando muscoli sinergici hanno raggiunto massimo stress - Il reclutamento dei muscoli è funzione della PCSA
CONSISTENTE con la fisiologia

APPROCCI NON-LINEARI
-Minimizzazione del quadrato delle forze (i.e. Potenza)
Min(SFi2)
- Massimizzazione del tempo di resistenza alla fatica
tale tempo legato a (1/F)n n costante ma non standardizzata

LINEARE vs NON-LINEARE
Approcci LINEARI assicurano la convergenza Approcci NON-LINEARI possono avere più soluzioni compatibili (più di una soluzione)

CRITERI DI
OTTIMIZZAZIONE
- Forze e momenti sono bilanciati per soddisfare equazioni di equilibrio. - I muscoli esercitano solo forze unidirezionali di tensione - Le forze sui tendini sono compressive - Le forze in gioco limitate (see fisiologia) - Le articolazioni sono modellizzate come cerniere che si muovono su un piano (2D)

• In condizioni quasi-stazionarie, le forze inerziali ed I momenti sono trascurabili
Bilancio completo tra IN-EXT • I momenti generati sulle articolazioni sono in accordo con l’anatomia
Ci si rifà a misure su cadavere
CRITERI DI
OTTIMIZZAZIONE


• La risposta meccanica dei materiali può essre limitata alla risposta dei materiali elastici, in particolare a quella dei materiali elastici lineari. • La maggior parte dei metalli mostrano un comportamento elastico lineare quando sono soggetti a sforzi relativamente bassi a temperatura ambiente. • Essi subiscono deformazioni anelastiche a livelli alti di sforzo. • Per un materiale elastico, la relazione tra sforzo e deformazione può essere espressa nella seguente formula generale:
σ = σ(ε)
ELASTICITÀ

• Nella risposta di un materiale elastico, il concetto di tempo non entra in discussione. • I materiali elastici mostrano un comportamento indipendente dal tempo. • I materiali elastici si deformano istantaneamente quando sono soggetti a carichi applicati dall’esterno. • Essi recuperano la loro forma originale (a riposo) quasi istantaneamente quando i carichi applicati sono rimossi.
ELASTICITÀ vs TEMPO

• C’è un differente gruppo di materiali – i metalli alle alte temperature – le plastiche polimeriche – quasi tutti i materiali biologici • che manifestano una deformazione e un recupero graduali quando sono soggetti a carico e scarico. • La risposta di questi materiali dipende da quanto rapidamente il carico è applicato o rimosso, l’entità della deformazione essendo dipendente dalla velocità alla quale sono applicati i carichi che quella deformazione provocano. • Questo comportamento del materiale dipendente dal tempo è detto viscoleasticità.
ELASTICITÀ ?

viscosità e elasticità. • La viscosità è una proprietà dei fluidi ed è una misura della resistenza al flusso. • L’elasticità, dall’altra parte, è una proprietà dei materiali solidi. • Pertanto, un materiale viscoelastico è un materiale che possiede proprietà tipiche sia dei fluidi sia dei solidi.
VISCOELASTICITÀ

• Per i materiali viscoelastici, la relazione tra sforzo e deformazione stabilisce che lo sforzo è funzione non soltanto della deformazione ma anche della velocità di deformazione. • Il diagramma sforzo-deformazione di un materiale viscoelastico non è unico.
s =sˆ (e ,ë)
ViscoElasticità

• Un materiale elastico si deforma, immagazzina energia potenziale, e recupera le deformazioni secondo modalità simili a quelle di una molla. • Il modulo elastico E per un materiale elastico lineare mette in relazione sforzi e deformazioni, • mentre la costante k per una molla lineare mette in relazione le forze applicate e le corrispondenti variazioni di lunghezza.
MOLLA

• Il dispositivo meccanico smorzatore è usato per simulare il comportamento di un fluido. • Uno smorzatore è costituito da sistema pistone-cilindro o da una siringa. • Una forza applicata al pistone spinge il pistone nella direzione della forza applicata.
SMORZATORE

• Una molla e uno smorzatore sono collegati in parallelo. • Lo sforzo totale applicato al sistema sarà ripartito tra la molla e lo smorzatore:
σ = σs + σd • La molla e lo smorzatore si deformano di una stessa quantità. Pertanto, la deformazione totale è
ε = εs = εd
Modello di Kelvin-Voigth

• Costruito collegando una molla e uno smorzatore in serie. • Uno sforzo σ applicato all’intero sistema agisce nella stessa misura sia sulla molla sia sullo smorzatore:
σ = σs = σd • e la deformazione risultante ε è la somma delle d. nella molla e nello smorzatore:
ε = εs + εd
Modello di Maxwell

MODELLO DI HILL
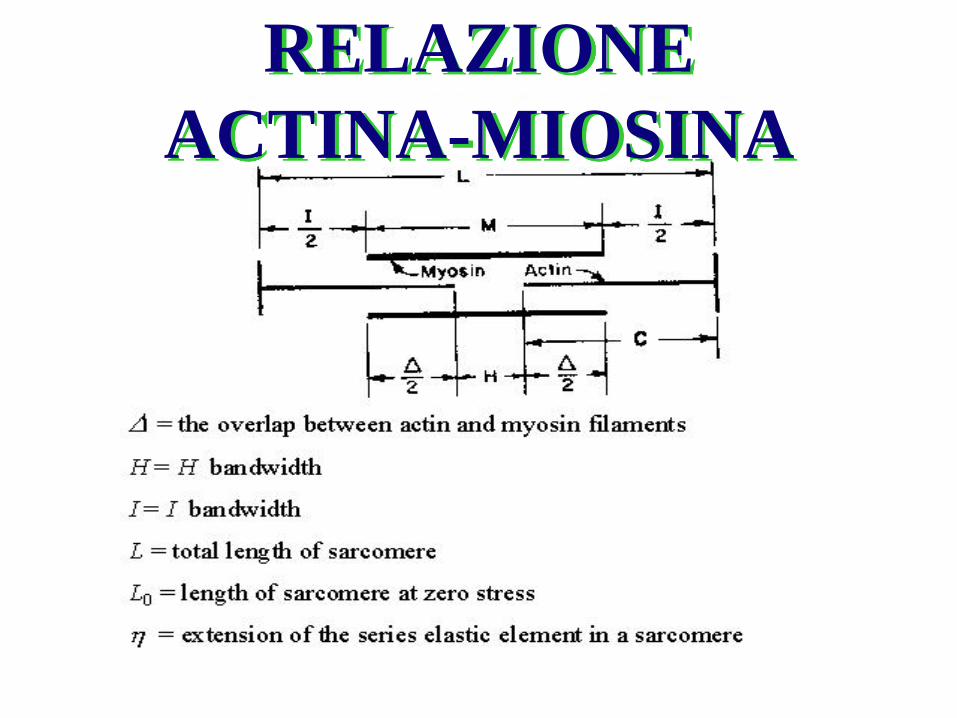
RELAZIONE
ACTINA-MIOSINA

Tensione totale esercitata dal modello è la somma del ramo serie e ramo parallelo
A riposo T(s) = 0
A questo punto è possile calcolare le variazioni nel tempo nei i due rami:
MATEMATICA

CRITICITA’ DEL
MODELLO
• Nel modello i parametri del ramo serie e di quello parallelo sono indipendenti tra loro
• Le caratteristiche componente elastica e viscosa lineare con lo stress
• Modello funziona per muscolo tetanizzato


STRUTTURA

Zona “compatta” Zona “spugnosa” La parte più esterna. Particolarmente presente su ossa lunghe La parte s. da consistenza all’osso rendendolo resistente ma leggero

MICROSTRUTTURA
Spongy or cancellous bone consists of a lattice of thin threads of bone called trabeculae and is less dense than compact bone. The orientation of the trabeculae is affected by the mechanical stress to which the bone is exposed. In this photo spongy bone can be seen filling the distal end of the femur.
SEM of the trabeculae of spongy bone. x40

Wolf (1870): “la forma dell’osso e funzione dagli stress su questo (ISOSTATICS)...”
LEGGE DI WOLF
ADATTAMENTO FUNZIONALE
Structure Isostatics

Wolf Law of Functional Adaptation (b)

FRATTURA
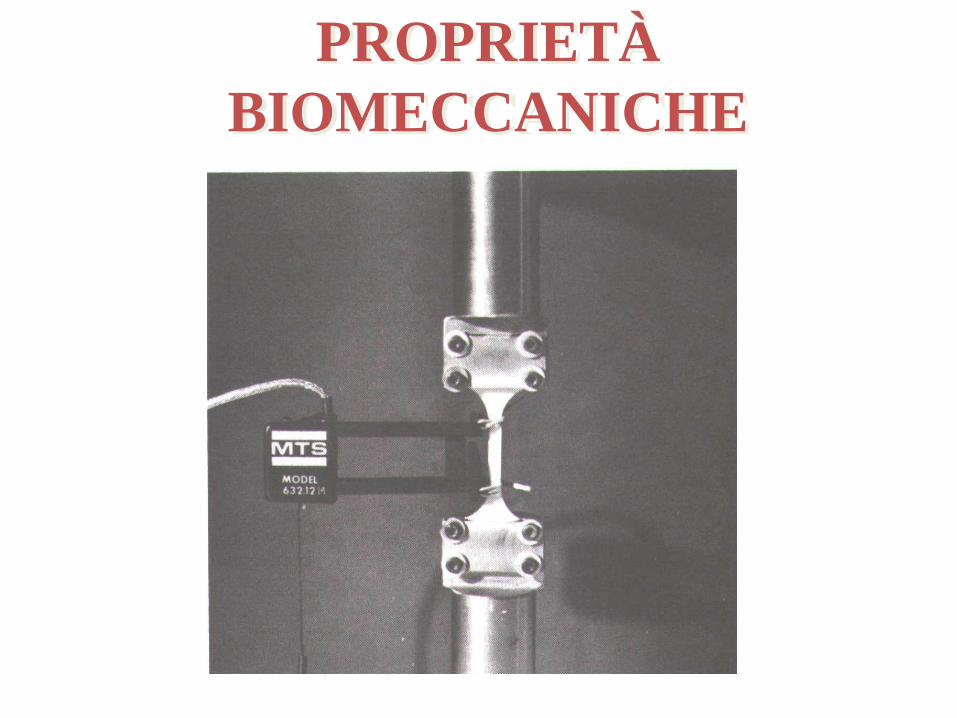
PROPRIETÀ
BIOMECCANICHE
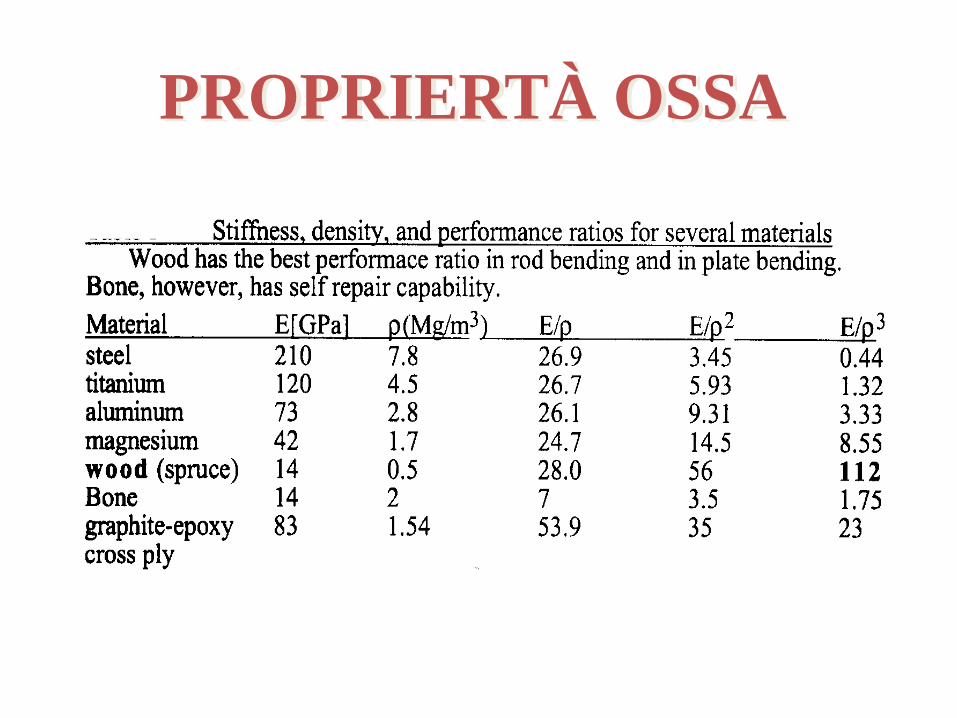
PROPRIERTÀ OSSA

RISPOSTA ALLO STRESS Cortical Bone (Femoral Shaft)

TIPI DI STRESS

TEORIA DELLE FRATTURE
DA STRESS

EFFETTO ETÀ

OSTEOPOROSI
Normal Trabecular Structure Osteoporotic Trabecular Structure





























