Embed Size (px)
Citation preview

LABORATORY MANUAL
Dhanalakshmi College of Engineering
Manimangalam, Tambaram, Chennai –601 301
DEPARTMENT OF
ELECTRICAL AND ELECTRONICS ENGINEERING
EE6511 - CONTROL AND INSTRUMENTATION LABORATORY
V SEMESTER - R 2013
Name :
RegisterNo. : ____________________________________________
Section : ____________________________________________
DHANALAKSHMI COLLEGE OF ENGINEERING
VISION
Dhanalakshmi College of Engineering is committed to provide highly disciplined, conscientious and
enterprising professionals conforming to global standards through value based quality education and training.
MISSION
To provide competent technical manpower capable of meeting requirements of the industry
To contribute to the promotion of Academic Excellence in pursuit of Technical Education at different levels
To train the students to sell his brawn and brain to the highest bidder but to never put a price tag on heart and
soul
DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING
VISION
To provide candidates with knowledge and skill in the field of Electrical and Electronics Engineering and
thereby produce extremely well trained, employable, socially responsible and innovative Electrical and Electronics
Engineers.
MISSION
To provide the students rigorous learning experience to produce creative solutions to society’s needs.
To produce electrical engineers of high calibre, conscious of the universal moral values adhering to
professional ethical code.
To provide highest quality learning environment for the students emphasizing fundamental concepts with
strongly supported laboratory and prepare them to meet the global needs of the industry by continuous
assessment and training.
1 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
PROGRAM EDUCATIONAL OBJECTIVES (PEOs)
1. Fundamentals
To provide students with a solid foundation in mathematics, science and fundamentals of engineering
enabling them to solve complex problems in order to develop real time applications.
2. Core Competence
To train the students to meet the needs of core industry with an attitude of learning new technologies.
3. Breadth
To provide relevant training and experience to bridge the gap between theory and practice which enable
them to find solutions to problems in industry and research that contributes to the overall development of society.
4. Professionalism
To inculcate professional and effective communication skills to the students to make them lead a team and
stand as a good decision maker to manage any constraint environment with good professional ethics at all
strategies.
5. Lifelong Learning/Ethics
To practice ethical and professional responsibilities in the organization and society with commitment
and lifelong learning needed for successful professional career.
PROGRAM OUTCOMES (POs) Student will be able
a. To demonstrate knowledge of mathematics, science and electrical engineering
b. To identify, formulate and solve electrical engineering problems
c. To design and conduct experiments, analyze and interpret data
d. To design a system, component or process as per needs and specifications
e. To visualize and work on laboratory and multidisciplinary tasks
f. To use modern engineering tools, software and equipment to analyze problems
g. To demonstrate knowledge of professional and ethical responsibilities
h. To communicate effectively by both verbal and written form
i. To show the understanding of impact of engineering solutions on the society and also will be aware of
contemporary issues
j. To develop confidence for self-education and ability for lifelong learning
k. To participate and succeed in competitive examinations
2 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
EE6511 – Control and Instrumentation Laboratory
SYLLABUS
COURSE OBJECTIVES
To provide knowledge on analysis and design of control system along with basics of Instrumentation
LIST OF EXPERIMENTS
CONTROLSYSTEMS 1. P, PI and PID controllers 2. Stability Analysis 3. Modelling of Systems – Machines, Sensors and Transducers 4. Design of Lag, Lead and Lag-Lead Compensators 5. Position Control Systems 6. Synchro-Transmitter- Receiver and Characteristics 7. Simulation of Control Systems by Mathematical development tools.
INSTRUMENTATION 8. Bridge Networks –AC and DC Bridges 9. Dynamics of Sensors/Transducers
Temperature Pressure Displacement Optical Strain Flow
10. Power and Energy Measurement 11. Signal Conditioning
Instrumentation Amplifier Analog – Digital and Digital –Analog converters (ADC and DACs)
12. Process Simulation.
COURSE OUTCOMES
1. Ability to understand basic science, circuit theory, Electro-magnetic field theory, control theory concepts. 2. Ability to apply basic science, circuit theory, Electro-magnetic field theory, control theory concepts for
engineering problems. 3. Ability to measure energy and power. 4. Ability to understand the working of instrumentation amplifier. 5. Ability to analyze the analog to digital conversion. 6. Ability to analyze the digital to analog conversion. 7. Ability to measure the unknown high resistance value using bridges. 8. Ability to measure the unknown low resistance value using bridges. 9. Ability to measure the unknown impedance value using bridges. 10. Ability to understand the working of transducers 11. Ability to model the given control system mathematically. 12. Ability to model the given controllers
3 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
EE6511 –CONTROL AND INSTRUMENTATION
LABORATORY CONTENTS
Sl. No. Name of the experiment Page No.
CYCLE 1 EXPERIMENTS
1 Measurement of Energy using Single Phase Energy Meter 5
2 Power Measurement in Three Phase Circuits 8
3 Instrumentation Amplifier 11
4 Analog to Digital Converter 14
5 Digital to Analog Converter 17
6 Wheatstone Bridge 20
7 Kelvin Double Bridge 22
CYCLE 2 EXPERIMENTS
8 Pressure Transducer 25
9 Linear Variable Differential Transducer (LVDT) 28
10 Measurement of Inductance
31 (Using Maxwell’s Inductance and Capacitance Bridge)
11 Stability Analysis of Linear Systems 34
12 Determination of Transfer Function of Separately Excited DC Generator 37
ADDITIONAL EXPERIMENTS BEYOND THE SYLLABUS
13 Study of P, PI, PID Controllers 43
14 Study of AC Synchro Transmitter and Receiver 46
4 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No. 1: MEASUREMENT OF ENERGY USING SINGLE PHASE ENERGY METER
Aim:
To calibrate the given single phase energy meter using direct loading
Apparatus required:
Sl.No Name of the Experiment Type Range Quantity
1. Single phase energy meter
2. Wattmeter LPF 300V,10A 1
3. Voltmeter MI (0-300V) 1
4. Ammeter MI (0-10A) 1
5. Load 1
6. Connecting wires as required
Formula:
Energy meter specification = 750 rev /per kWh
True Energy = (P x T) / (3600 x 1000) in kWh
Measured Energy = (n / 750) in kWh
Where n = Number of revolutions / sec
% Energy = (Measured Energy x True Energy) / True Energy x 100
Theory:
The energy meter is an integrated type of an instrument where the speed of rotation of the aluminum disc is
directly proportional to the power consumed and the number of revolutions per minutes is proportional to the energy
consumed by the load. The ratings associated with the energy meter are
1. Voltage rating
2. Current rating
3. Frequency rating
4. Meter constants
The driving system of the meter provides the rotational torque for the moving system, which in turn activates the
energy registration system for reading purposes. The energy meter is operated on induction principle, in which the
eddy current induced in the aluminum disc interacts with the main field and creates the driving torque.
5 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
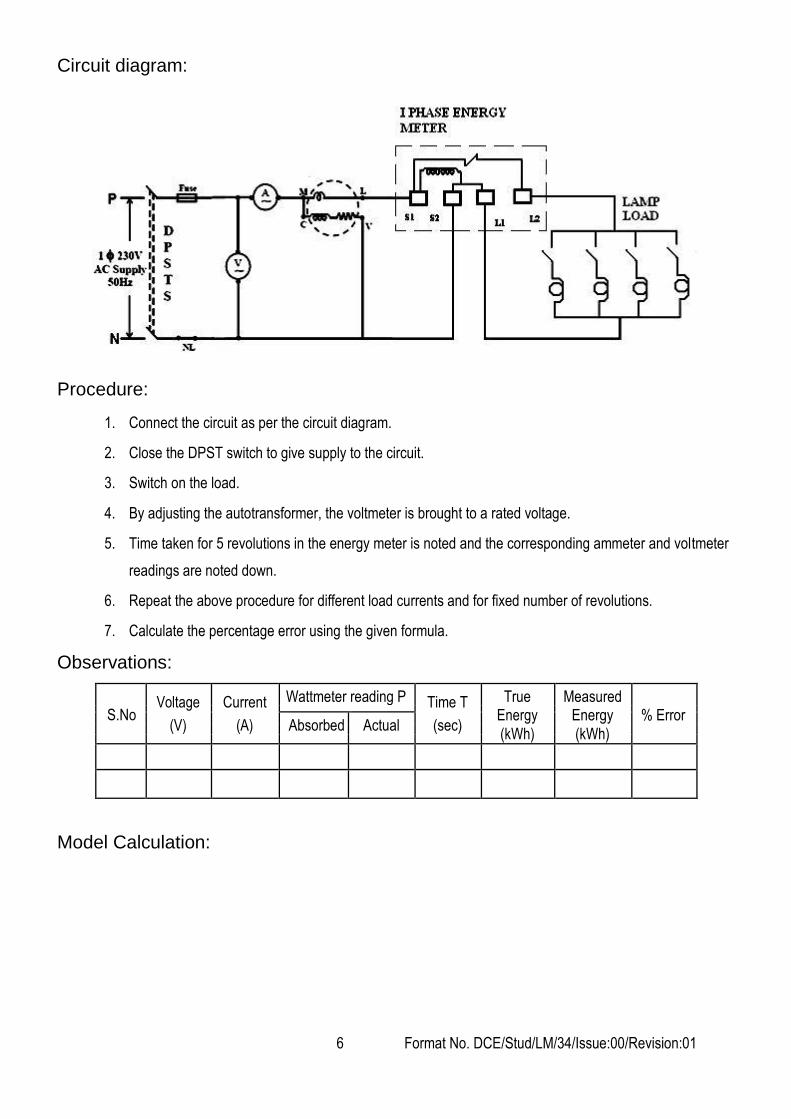
Circuit diagram:
Procedure:
1. Connect the circuit as per the circuit diagram.
2. Close the DPST switch to give supply to the circuit.
3. Switch on the load.
4. By adjusting the autotransformer, the voltmeter is brought to a rated voltage.
5. Time taken for 5 revolutions in the energy meter is noted and the corresponding ammeter and voltmeter
readings are noted down.
6. Repeat the above procedure for different load currents and for fixed number of revolutions.
7. Calculate the percentage error using the given formula.
Observations:
S.No Voltage Current Wattmeter reading P Time T True Measured
Energy Energy % Error (V) (A) Absorbed Actual (sec) (kWh) (kWh)
Model Calculation:
6 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Result:
Thus the given single phase energy meter was calibrated.
Outcome:
From this experiment student will able to calibrate the energy meter.
Application: The single phase energy meter is used for electrical energy measurements in homes and industries.
Viva – voce
1. What is calibration? 2. Define instrument. 3. What is the need for measurement? 4 Write the need for calibration. 5. What is meant by measurement? 6. What are the methods of measurements? 7. Write the classification of measuring instruments. 8. Define integrating instruments. 9. What are the requirements of an instrument? 10. Which torque is absent in energy meter? Why? 11. What is volt ampere hour and watt hour? 12. What is creeping in energy meters?
7 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No. 2: POWER MEASUREMENTS IN THREE PHASE
CIRCUITS
Aim:
To measure the three phase power using two wattmeter methods also to find out the power factor
Apparatus required:
Sl .No Name of the Experiment Type Range Quantity
1. Wattmeter UPF 600V,10A 2
2. Voltmeter MI (0-600V) 1
3. Ammeter MI (0-10A) 1
4. Load 1
5. Connecting wires as required
Formulae:
Power W = W1 + W2 in watts
Power factor Cos = Cos tan 1 [3 (W1 - W2 ) / (W1 + W2 ) ]
Total Power = 3 VL IL Cos in watts
Where VL – Load voltage
IL - Load current
Cos - Power factor
Precaution:
1. At the time of starting the loading rheostat should be at no load condition.
2. Autotransformer should be at minimum position at the time of starting.
Theory:
The electrodynamometer type instrument is a transfer instrument. A transfer instrument is one which calibrated
with a dc source and used without any modifications for ac measurements. Such a transfer instrument has same
accuracy for ac and dc measurements. The electrodynamometer type instruments are often used in accurate ac
voltmeters and ammeters, not only at the power line frequency but also in the lower audio frequency range. With
some little modifications, it can be used as a wattmeter for the power measurements.
8 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
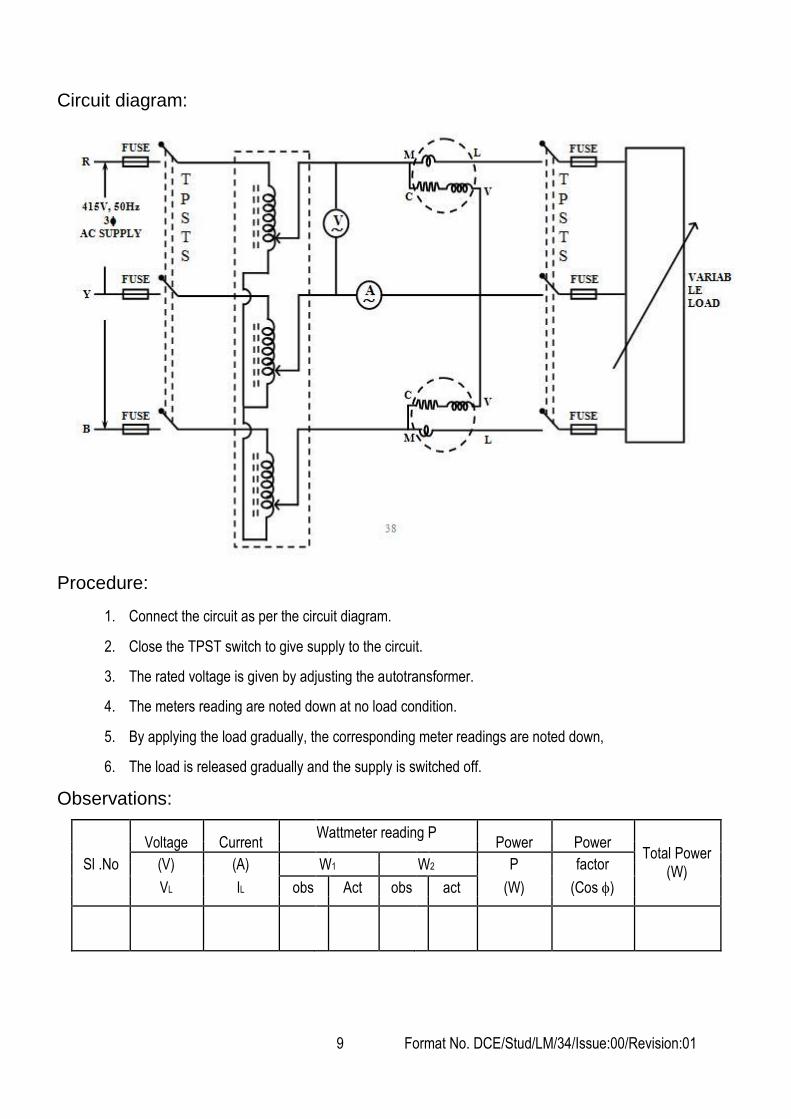
Circuit diagram:
Procedure:
1. Connect the circuit as per the circuit diagram.
2. Close the TPST switch to give supply to the circuit.
3. The rated voltage is given by adjusting the autotransformer.
4. The meters reading are noted down at no load condition.
5. By applying the load gradually, the corresponding meter readings are noted down,
6. The load is released gradually and the supply is switched off.
Observations:
Voltage Current
Wattmeter reading P Power Power
Sl .No
Total Power (V) (A)
W1
W2 P factor (W)
VL IL
(W) (Cos )
obs
Act obs
act
9 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Model Calculation:
Result:
Thus the three phase power was measured using two wattmeter method and also the power factor
was determined.
Outcomes:
From this experiment student will able to
1. Measure the three phase power.
2. Determine the power factor and real, reactive power for a given load.
Application:
The three phase power measurement is used for measuring electrical power in homes and industries.
Viva - Voce
1. What are the types of instruments? 2. How a PMMC meter can be used as voltmeter and ammeter? 3. Give the advantage of moving iron meters? 4. For which type of measurements PMMC devices are suitable. 5. State the advantages of PMMC instruments. 6. State the disadvantages of PMMC instruments. 7. State the applications of PMMC instruments. 8. State the advantages of dynamometer type instruments. 9. State the advantages of moving iron type instruments. 10. What are the constructional parts of dynamometer type wattmeter? 11. Name the errors caused in dynamometer type wattmeter. 12. Name the methods used for power measurement in three phase circuits. 13. Name the methods used in wattmeter calibration.
10 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No. 3: INSTRUMENTATION AMPLIFIER
Aim:
To study the operating principle of the instrumentation amplifier operation using variable voltage as an input of
the amplifier
Apparatus required:
1. Instrumentation amplifier trainer kit
2. Digital multimeter
3. Patch cards
Formula:
Output voltage V0 = (V1 – V2) x (Rf / R) in volts
Theory:
In many industrial and commercial applications, the measurement and control of physical conditions are very
important. For example, measurement temperature and humidity inside a dairy or meat plant permits the operator to
make necessary adjustments to maintain product quality. Similarly, precise temperature control of a plastic furnace
is needed to produce a particular type of plastic.
Generally, a transducer is used at the measuring site to obtain the required information easily and safely.
The transducer is a device that converts one form of energy in to another.
For example, a strain gauge when subjected to pressure or force (physical energy) undergoes a change in
its resistance (electrical energy). An instrumentation system is used to measure the output signal produced by
a transducer and often to control the physical signal producing it.
The input stage is composed of a preamplifier and some of transducer, depending on the physical quantity to
be measured. The output stage may use devices such as meters, oscilloscopes, charts, or magnetic records.
11 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
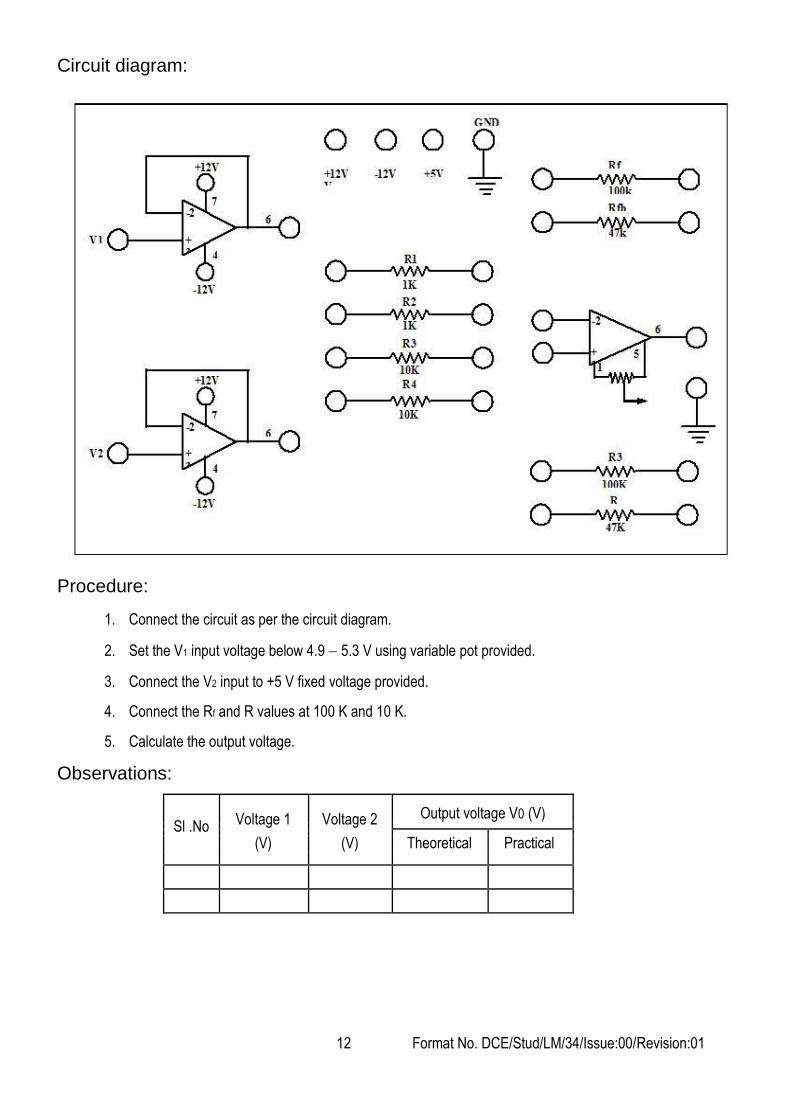
Circuit diagram:
Procedure:
1. Connect the circuit as per the circuit diagram.
2. Set the V1 input voltage below 4.9 5.3 V using variable pot provided.
3. Connect the V2 input to +5 V fixed voltage provided.
4. Connect the Rf and R values at 100 K and 10 K.
5. Calculate the output voltage.
Observations:
Sl .No Voltage 1 Voltage 2 Output voltage V0 (V)
(V) (V) Theoretical Practical
12 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Model calculation:
Result:
Thus the operating principle of the instrumentation amplifier using variable voltage was studied.
Outcomes:
From this experiment student will able to
1. Design an instrumentation amplifier using OP AMP 2. Analyze the characteristics of an OP AMP
Applications:
1. In Data acquisition from low output transducers such as strain gauges, Thermocouples, Wheatstone bridge measurements e.t.c
2. In Medical instrumentation, Navigation, Radar instrumentation e.t.c 3. In Audio applications involving low amplitude audio signals in noisy environments to improve the signal
to noise ratio; 4. High-speed signal conditioning for video data acquisition and imaging 5. High frequency signal amplification in cable RF systems.
Viva - Voce
1. What is the use of instrumentation amplifier?
2. What are the characteristics of instrumentation amplifier?
3. Why instrumentation amplifier used in measurement system?
4. Define Amplifier
5. Define Attenuator
6. What is meant by differential amplifier?
7. What is meant by biasing?
8. What is meant by instrumentation amplifier?
9. What are the different modes of differential amplifier?
10. Define DC offset
11. Define CMRR
12. Write down the gain formulae of instrumentation amplifier.
13 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No. 4: ANALOG TO DIGITAL CONVERTER
Aim:
To study the analog to digital converter operation through successive approximation converter in a single mode
operation
Apparatus required:
1. ADC Trainer (LT-3010)
2. Digital multimeter
3. Patching cards
Theory:
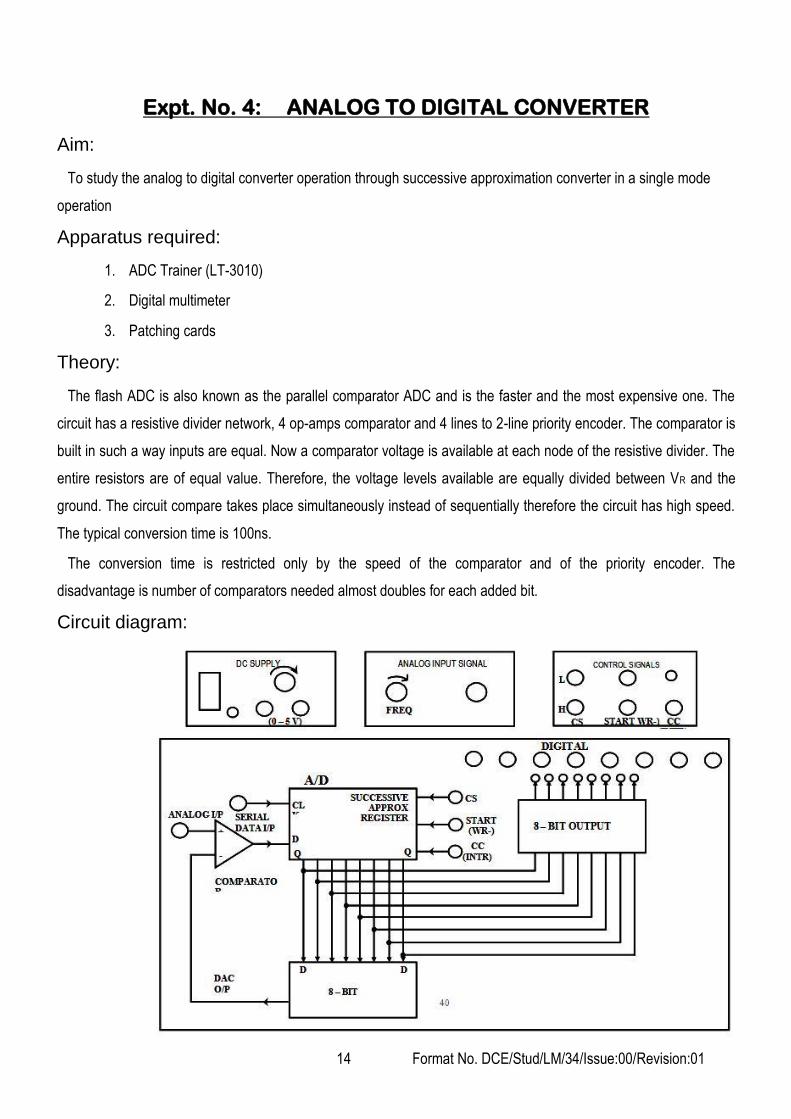
The flash ADC is also known as the parallel comparator ADC and is the faster and the most expensive one. The
circuit has a resistive divider network, 4 op-amps comparator and 4 lines to 2-line priority encoder. The comparator is
built in such a way inputs are equal. Now a comparator voltage is available at each node of the resistive divider. The
entire resistors are of equal value. Therefore, the voltage levels available are equally divided between VR and the
ground. The circuit compare takes place simultaneously instead of sequentially therefore the circuit has high speed.
The typical conversion time is 100ns.
The conversion time is restricted only by the speed of the comparator and of the priority encoder. The
disadvantage is number of comparators needed almost doubles for each added bit.
Circuit diagram:
14 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Procedure:
1. Interconnect the connection as per the patching diagram.
2. Interconnect the ADC trainer and power supply circuit through the 4-pin RMC connector.
3. Switch ON the supply and adjust the input to the ADC is 1V through the pot meter.
4. Put the chip select(CS) switch in the low position and give the start of convention (WR) signal high to
low and high (normally WR is in high position).
5. After the conversion completion action, the digital output of the ADC corresponding to the input is
displayed in the LEDs and terminated in the D0 to D7 test terminals.
6. Change the input to the ADC is 2V through the pot meter. Also give the chip select (CS) and start of
conversion signal to the ADC, the corresponding digital output is indicated in the output LEDs.
7. Repeat the experiment at the different analog input and tabulate it.
Observations:
Input analog Digital outputs
voltage (V)
Model Calculations:
Result:
Thus the analog to digital converter operation through successive approximation converter was studied.
Outcome:
From this experiment student will able to analyze the A/D conversion through successive approximation register. Applications: Data aquisition systems and audio systems.
15 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Viva - Voce
1. What are the different types of ADC? 2. What are the advantages of successive approximation method? 3. What is the use of sample hold circuit? 4. Define ADC. 5. What are the applications of ADC? 6. What is the necessity of sample and hold circuit?
16 Format No. DCE/Stud/LM/34/Issue:00/Revision:01

Expt. No.: 5 DIGITAL TO ANALOG CONVERTER
Aim:
To study the digital to analog converter operation using binary weighted resistor technique
Apparatus required:
1. DAC Trainer
2. Digital multimeter
3. Patching cards
Theory:
The circuits used for digital to analog conversion are known as DAC. The number of the binary inputs is four in a 4-bit
(binary digit) converter. Because there are 16 (24) combinations of binary inputs for D0 through D3, an analog output
should have 16 possible corresponding values. Four switches (b0 to b3) are used to simulate the binary inputs. The
output voltage equation is
Assume that the resistor R1, R2, R3....... Rn are binary weighted resistors, thus
R1 = R
R2 = 2R
R3 = 4R
Rn = (2n-1) R
Formula:
V0 = RF (VD0 /16) +(VD1 /8) +(VD2 /4) +(VD3 /2)
17 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
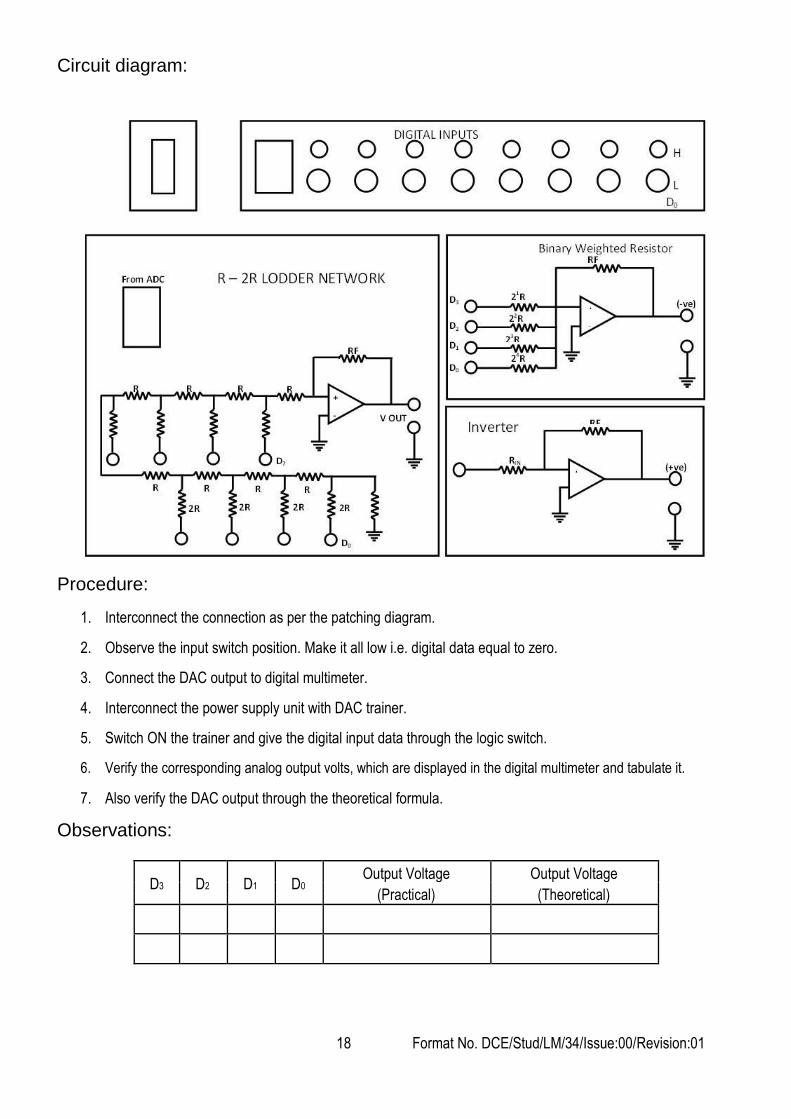
Circuit diagram:
Procedure:
1. Interconnect the connection as per the patching diagram.
2. Observe the input switch position. Make it all low i.e. digital data equal to zero.
3. Connect the DAC output to digital multimeter.
4. Interconnect the power supply unit with DAC trainer.
5. Switch ON the trainer and give the digital input data through the logic switch.
6. Verify the corresponding analog output volts, which are displayed in the digital multimeter and tabulate it.
7. Also verify the DAC output through the theoretical formula.
Observations:
D3 D2 D1 D0 Output Voltage Output Voltage
(Practical) (Theoretical)
18 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Result:
Thus the digital to analog converter operation using binary weighted resistor technique was studied.
Outcomes:
At the completion of this experiment student will able to
1. Analyze the D/A conversion through R-2R ladder network.
2. Analyze the D/A conversion through binary weighted register.
. Viva - Voce
1. What are the different types of DAC?
2. What are the draw backs of binary weighted resistor DAC converter?
3. What is the advantage and disadvantages of flash type ADC?
4. What are the advantages and disadvantages of R-2R ladder DAC.
5. Define start of conversion and end of conversion.
6. What are the performance characteristics of DAC?
19 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No. 6: WHEATSTONE BRIDGE
Aim:
To measure the unknown resistance value using Wheatstone bridge
Apparatus required:
1. Wheatstone bridge trainer kit
2. Unknown resistance
3. Patch cards
Formula:
Unknown resistance R= (P/Q) x S in ohms
P – Standard resistance
Q - Standard resistance
S – Variable resistance
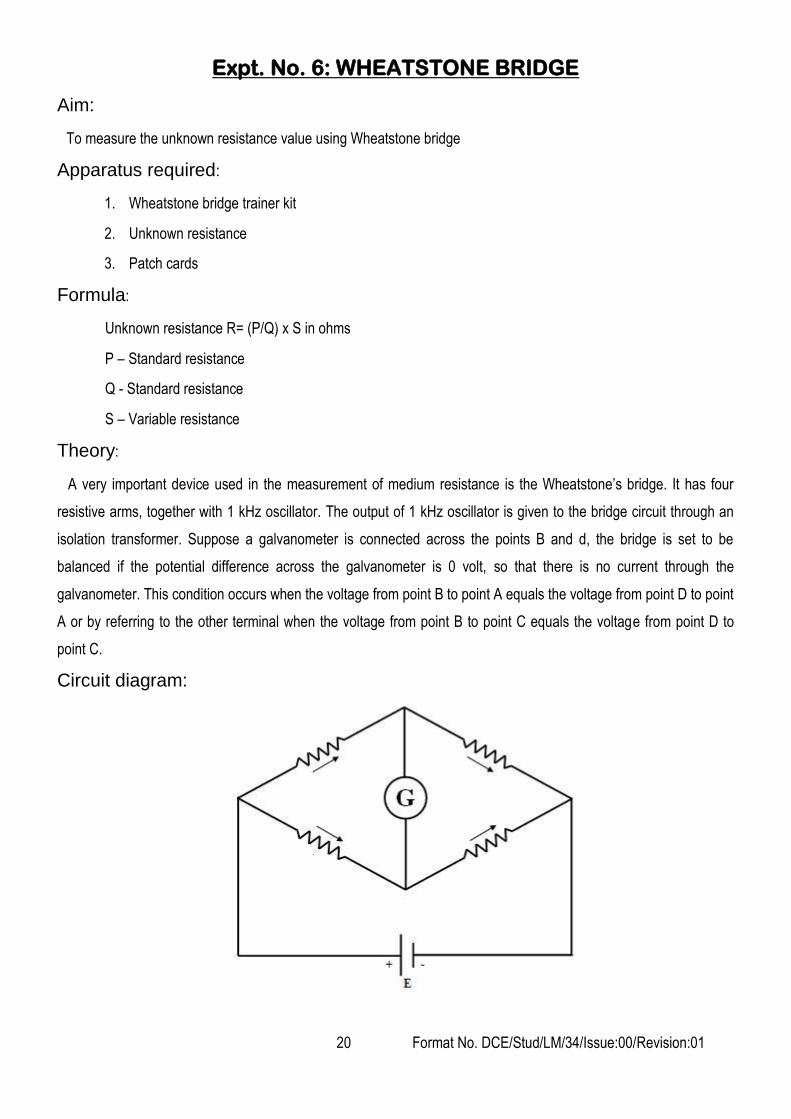
Theory:
A very important device used in the measurement of medium resistance is the Wheatstone’s bridge. It has four
resistive arms, together with 1 kHz oscillator. The output of 1 kHz oscillator is given to the bridge circuit through an
isolation transformer. Suppose a galvanometer is connected across the points B and d, the bridge is set to be
balanced if the potential difference across the galvanometer is 0 volt, so that there is no current through the
galvanometer. This condition occurs when the voltage from point B to point A equals the voltage from point D to point
A or by referring to the other terminal when the voltage from point B to point C equals the voltage from point D to
point C.
Circuit diagram:
20 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Procedure:
1. Connect the unknown resistance in the arm marked R.
2. Set the value in the multiplier.
3. Initially set the sensitivity knob to be in minimum position.
4. Press the galvanometer push button and battery push button switch simultaneously and adjust the
sensitivity to maximum value.
5. Adjust the knob S, until the galvanometer shows null deflection.
6. Measure the value of S under balanced condition.
7. Find the unknown resistance R using the given formula.
Observations:
Sl .No P (Ω) Q (Ω) S (Ω) Unknown resistance R(Ω)
Theoretical Practical
Model calculation:
Result:
Thus the unknown resistance value was measured using Wheatstone bridge.
Outcome:
From this experiment student will able to measure the unknown resistance value using DC bridge network.
Application:
One of the application of the Wheatstone bridge is a light detector
Viva - Voce
1. What is a bridge circuit? 2. What are the types of bridges? 3. What are the types of DC bridges? 4. What is a Wheatstone bridge?
5. What are the applications of Wheatstone bridge?
21 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt.No.7: KELVIN DOUBLE BRIDGE
Aim:
To measure the unknown resistance value using Kelvin double bridge
Apparatus required:
1. Kelvin double bridge trainer kit
2. Unknown resistance
3. Patch cards
Formula:
Unknown resistance R= (P/Q) x S in ohms
P – standard resistance
Q - standard resistance
S – Variable resistance
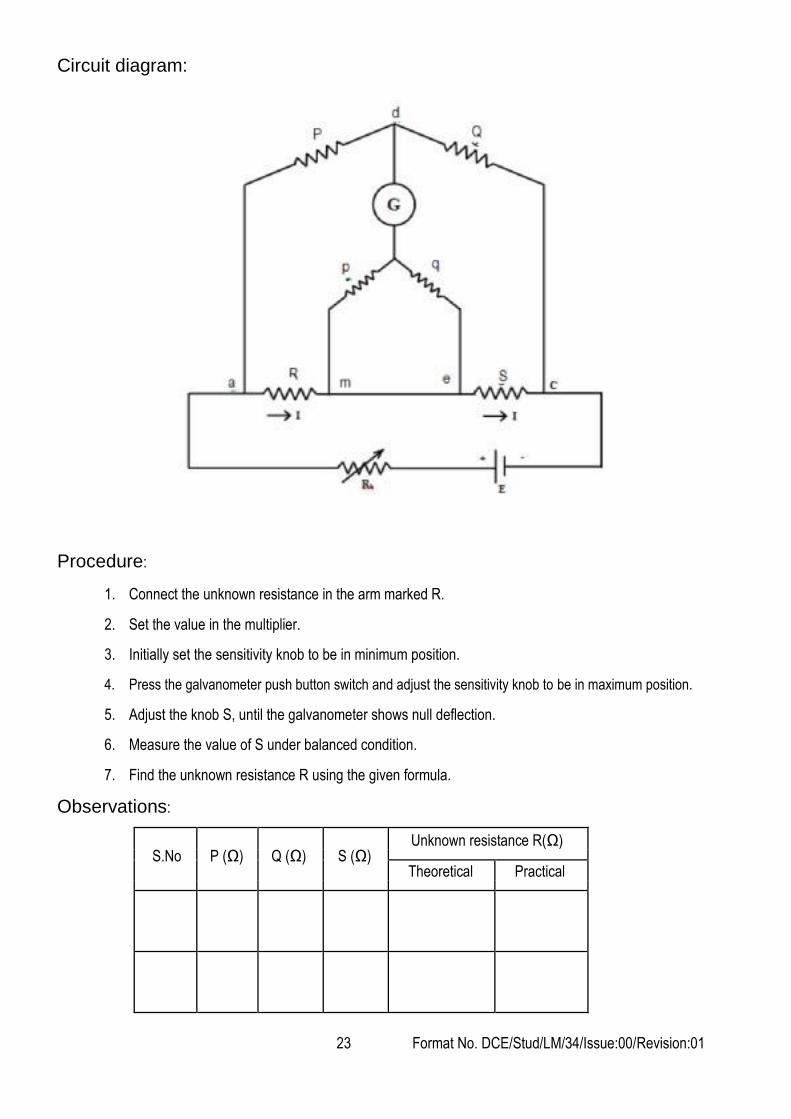
Theory:
Kelvin double bridge is a modification of Wheat stone bridge and provides increased accuracy in measurement of
low resistance. Kelvin double bridge incorporates two sets of ratio arms and the use of four terminal resistors for the
low resistance arms. Consider the circuit shown in figure. The first set of ratio arms are P and Q. The second set of
ratio arms, p and q are used to connect the galvanometer to a point c at the appropriate potential between points m
and n to eliminate the effect of connecting lead of resistance r between the known resistance R and the standard
resistance S. The ratio p/q is made equal to P/Q. Under balanced conditions, there is no current flowing through the
galvanometer, which means that the voltage drop between a and b, Eab is equal to the voltage drop Eamd between a &
c.
22 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Circuit diagram:
Procedure:
1. Connect the unknown resistance in the arm marked R.
2. Set the value in the multiplier.
3. Initially set the sensitivity knob to be in minimum position.
4. Press the galvanometer push button switch and adjust the sensitivity knob to be in maximum position.
5. Adjust the knob S, until the galvanometer shows null deflection.
6. Measure the value of S under balanced condition.
7. Find the unknown resistance R using the given formula.
Observations:
S.No P (Ω) Q (Ω) S (Ω) Unknown resistance R(Ω)
Theoretical Practical
23 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Model calculation:
Result:
Thus the unknown resistance value was measured using Kelvin double bridge.
Outcome:
From this experiment student will able to measure the unknown low resistance value effectively using Kelvin
bridge network.
Application:
To measure the value of low resistance
Viva - Voce
1) What is a bridge circuit?
2) What are the types of bridges?
3) What are the types of DC bridges?
4) When Kelvin bridge is used and why?
5) What is important condition for Kelvin Bridge to achieve perfect balance condition?
6) State the difficulties in measuring high resistances?
7) How is the wheatstone bridge modified to get more accuracy?
8) What are the factors affecting accuracy of the bridge circuit?
24 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No.8: PRESSURE TRANSDUCER
Aim:
To study the characteristics of pressure transducer
Apparatus required:
1. Pressure transducer trainer kit
2. Pressure tank with foot pump setup
3. Digital multimeter
Theory:
Pressure cells are divisors that convert pressure into electrical signal through a measurement of either
displacement strain or piezoelectric response. Diaphragm type pressure transducers with strain gauges as sensor is
used here for measurement of pressure.
This type of pressure transducers uses diaphragm as the elastic element. Diaphragms are used for low and middle
pressure ranges. Strain gauges are bonded on the diaphragm and the pressure force is applied to the specimen the
material gets elongated or compressed due to the force applied, that is the material gets strained. The strain incurred
by the specimen depends on the material used and its elastic module. The strain is transferred to the strain gauge
bonded on the material resulting in change in the resistance of the gauge. Since the strain gauge are connected in
the form of Wheatstone’s bridge, any change in the resistance will imbalance the bridge. The imbalance in the bridge
will intern gives out the output in mV proportional to the change in the resistance of the strain gauge.
25 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
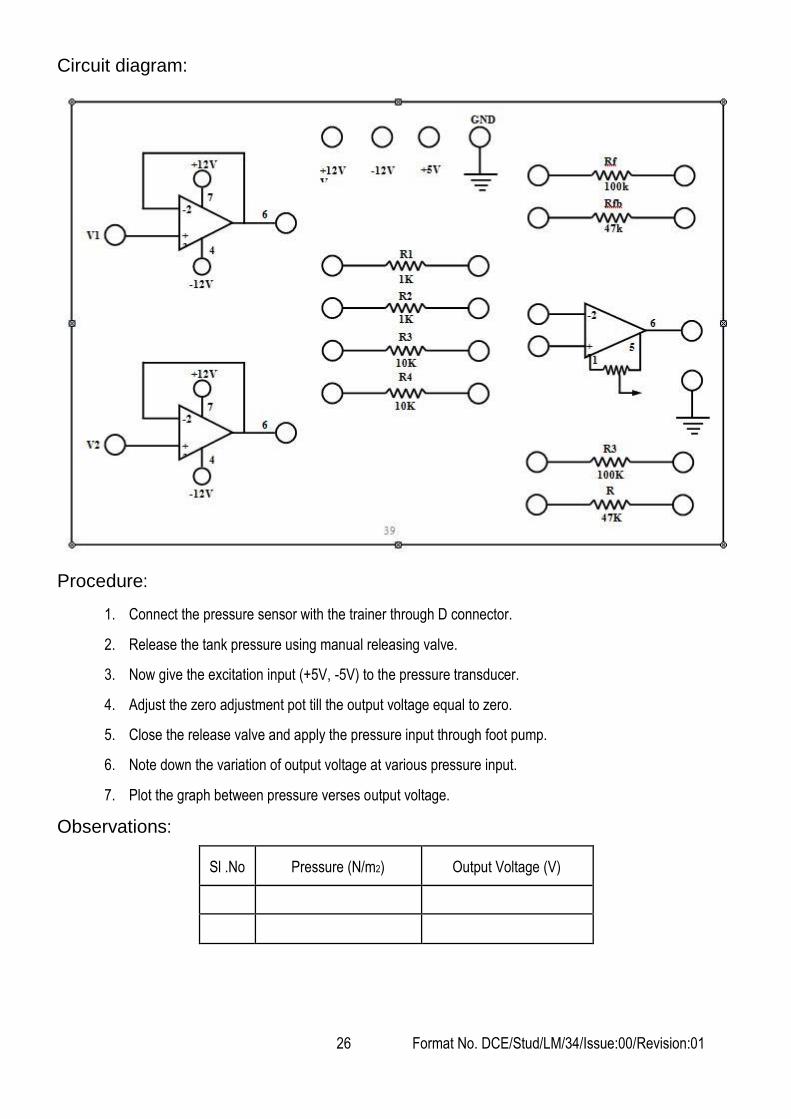
Circuit diagram:
Procedure:
1. Connect the pressure sensor with the trainer through D connector.
2. Release the tank pressure using manual releasing valve.
3. Now give the excitation input (+5V, -5V) to the pressure transducer.
4. Adjust the zero adjustment pot till the output voltage equal to zero.
5. Close the release valve and apply the pressure input through foot pump.
6. Note down the variation of output voltage at various pressure input.
7. Plot the graph between pressure verses output voltage.
Observations:
Sl .No Pressure (N/m2) Output Voltage (V)
26 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Result:
Thus the characteristic of pressure transducer was studied.
Outcome:
From this experiment student will able to analyze the characteristics of a pressure transducer.
Application: 1) Die-casting machine 2) Pressure monitoring for high power cleaning
Viva - Voce
1) Define: Transducer 2) Write the parameters of electrical transducer. 3) List the advantages of electrical transducers. 4) Define: Viscosity 5) In what principles,inductive transducer works? 6) Mention 2 disadvantages of capacitive transducer?
27 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No. 9: LINEAR VARIABLE DIFFERENTIAL TRANSDUCER
(LVDT)
Aim:
To study the characteristics of linear variable differential transformer
Apparatus required:
1. Linear variable differential transformer trainer kit
2. Digital multimeter
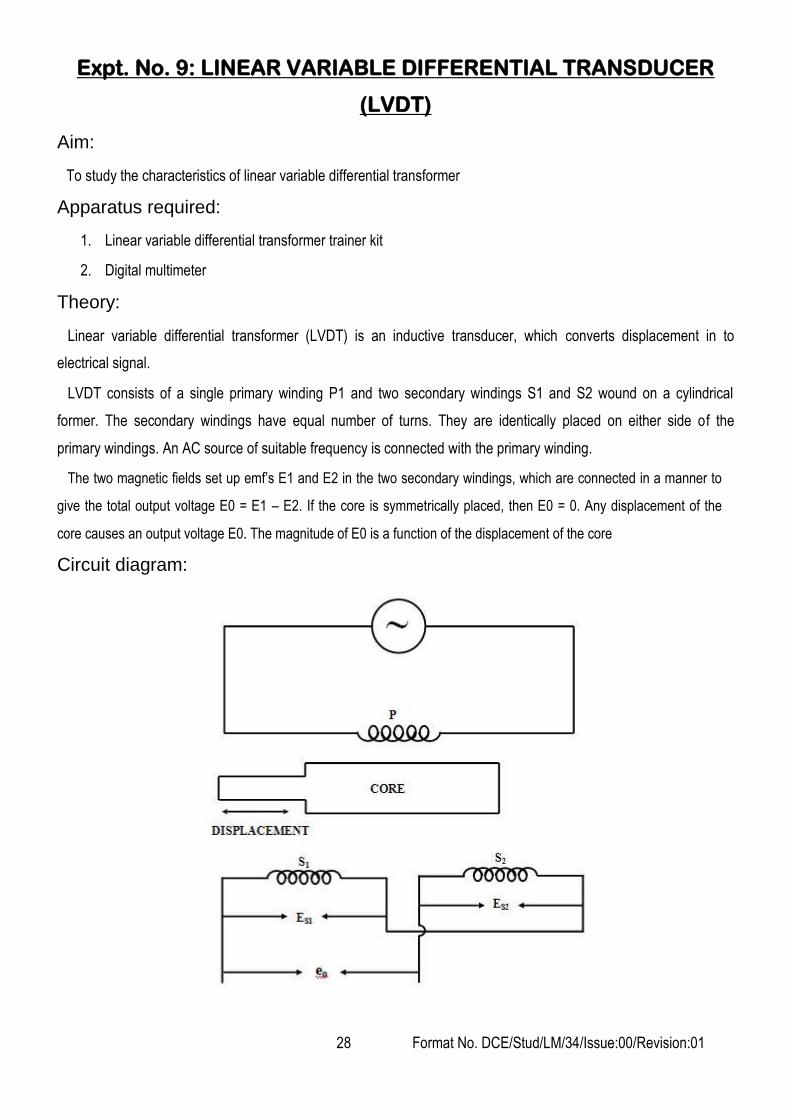
Theory:
Linear variable differential transformer (LVDT) is an inductive transducer, which converts displacement in to
electrical signal.
LVDT consists of a single primary winding P1 and two secondary windings S1 and S2 wound on a cylindrical
former. The secondary windings have equal number of turns. They are identically placed on either side of the
primary windings. An AC source of suitable frequency is connected with the primary winding.
The two magnetic fields set up emf’s E1 and E2 in the two secondary windings, which are connected in a manner to
give the total output voltage E0 = E1 – E2. If the core is symmetrically placed, then E0 = 0. Any displacement of the
core causes an output voltage E0. The magnitude of E0 is a function of the displacement of the core
Circuit diagram:
28 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Procedure:
1. Make the connections as per the circuit diagram.
2. Keep the frequency and gain knob in maximum position.
3. Keep the screw gauge in 10mm position and adjust the offset knob to get zero displacement in the
digital display.
4. Move the LVDT arm in one direction. For various values of displacement (in steps of 1) note down the
multimeter readings.
5. Move the LVDT arm in the other direction (from 10mm position) and repeat the above procedure.
6. Plot a graph between displacements versus voltage.
Observations:
Position Displacement (mm) Output Voltage (V)
+ve Null -ve
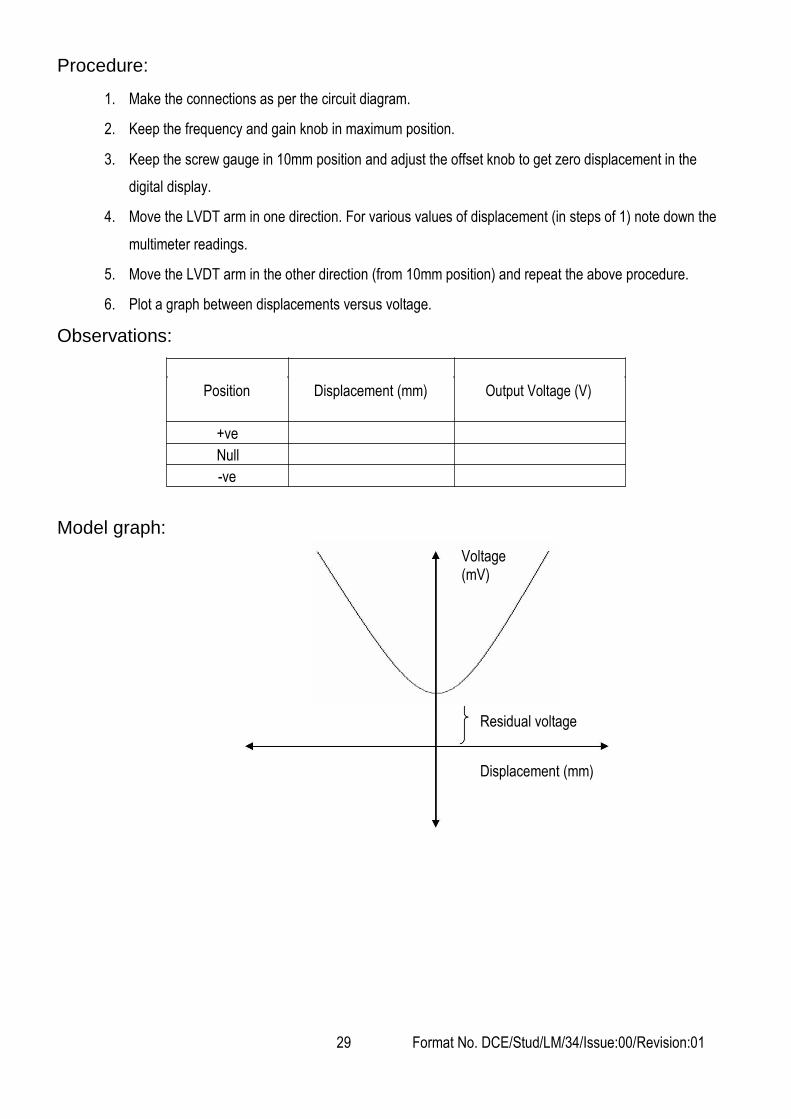
Model graph:
Voltage (mV)
Residual voltage
Displacement (mm)
29 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Result:
Thus the characteristics of linear variable differential transformer were studied.
Outcome:
From this experiment student will able to analyze the characteristics of displacement transducer.
Application: Position and motion measurement
Viva - Voce
1) Write a short notes on LVDT.
2) List the advantages of LVDT.
3) List the limitations of LVDT.
4) Define: Inductive Transducer
5) What is meant by digital transducers?
6) Classify digital transducers.
30 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No. 10: MEASUREMENT OF INDUCTANCE
(USING MAXWELL’S INDUCTANCE AND CAPACITANCE BRIDGE)
Aim:
To measure the unknown inductance value using Maxwell’s Inductance-Capacitance bridge
Apparatus required:
1. Maxwell’s Inductance-Capacitance bridge kit
2. Unknown Inductance
3. Bridge oscillator
4. Patching cards
5. CRO
Formula:
L = CPS
Where, C – Variable capacitor
S – Resistance of self-inductor L
P – Known non-inductive resistance
Theory:
A Bridge circuit in its simplest form consists of a network of four resistance arms forming closed circuits. A source
of current is applied to two opposite junctions. The current detector is connected to other two junctions.
Maxwell’s bridge can be used to measure by comparison either with a variable standard self-inductance or with a
standard variable capacitance. These two measurements can be done by using the Maxwell’s br idge in two different
forms. Using Maxwell’s inductance and Capacitance Bridge, We can measure inductance by comparing with a
variable standard capacitor.
31 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
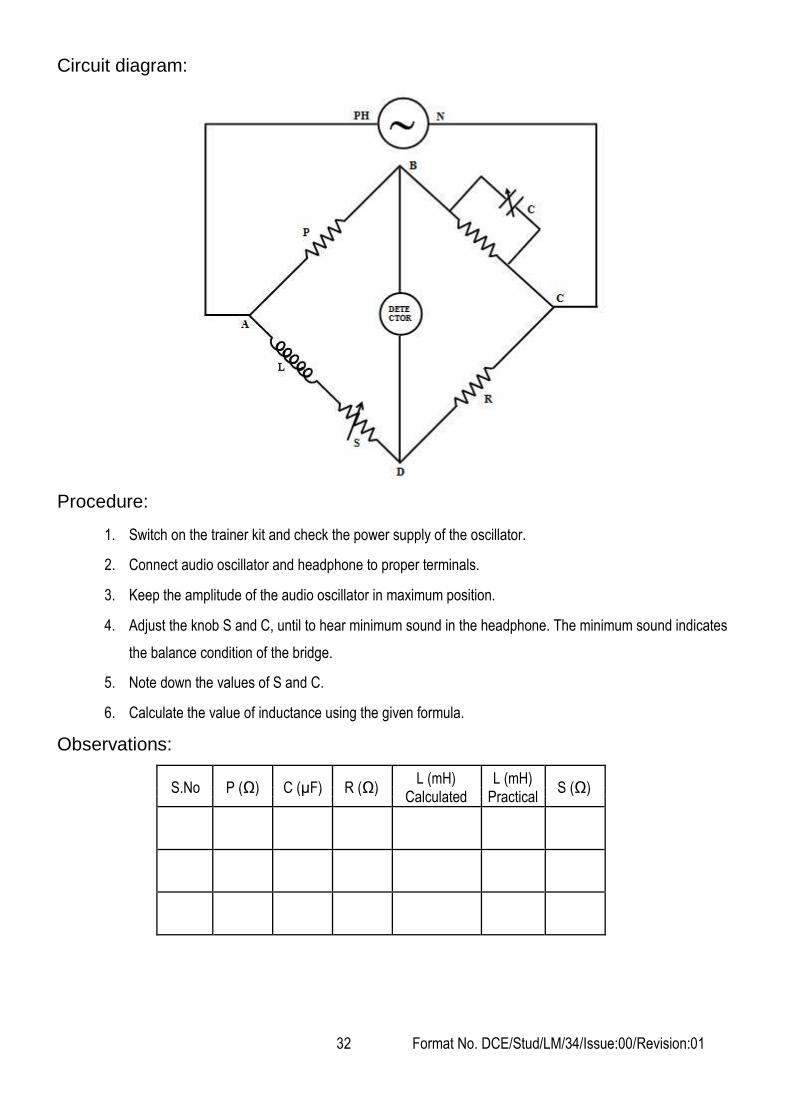
Circuit diagram:
Procedure:
1. Switch on the trainer kit and check the power supply of the oscillator.
2. Connect audio oscillator and headphone to proper terminals.
3. Keep the amplitude of the audio oscillator in maximum position.
4. Adjust the knob S and C, until to hear minimum sound in the headphone. The minimum sound indicates
the balance condition of the bridge.
5. Note down the values of S and C.
6. Calculate the value of inductance using the given formula.
Observations:
S.No P (Ω) C (µF) R (Ω) L (mH) L (mH)
S (Ω) Calculated Practical
32 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Model calculation:
Result:
Thus the unknown inductance value was measured using Maxwell’s Inductance - Capacitance bridge.
Outcome:
From this experiment student will able to measure the unknown inductance value using Maxwell’s LC bridge
network.
Application:
Electro magnetic seismograph
Viva - Voce
1. What is the main disadvantage of Maxwell’s Inductance-Capacitance bridge?
2. What are the types of A.C bridge?
3. What are the advantages of Maxwell’s Inductance-Capacitance bridge?
4. What is the working principle of Maxwell Bridge?
5. What are the types of Maxwell Bridge?
6. Write down the equation of Maxwell Inductance Bridge at balanced condition.
7. Write down the equation of Maxwell inductance Capacitance Bridge at balanced condition.
8. What are the advantages of Maxwell Bridge?
9. What are the disadvantages of Maxwell Bridge?
10. Define Quality Factor
11. What are the applications of Maxwell Bridge? 33 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No. 11: STABILITY ANALYSIS OF LINEAR SYSTEMS
Aim:
To analyze the stability of the linear systems using Bode / Root locus / Nyquist plot, using MATLAB Software tool
Apparatus required:
PC with MATLAB
Procedure:
1. Enter the command window of the MATLAB.
2. Create a new M-file by selecting FILE/NEW/M-FILE.
3. Type and save program.
4. Execute the program.
5. View the result
6. Analyze the stability of the system for various transfer functions.
Theory:
Bode Plot:
The bode plot is the frequency response plot of the transfer function of a system. A Bode plot consists of two
graphs. One is a plot of the magnitude of a sinusoidal transfer function versus log ω. the other is a plot of the phase
angle of sinusoidal transfer function versus log w.
The bode plot can be drawn for both open loop and closed loop transfer function. Usually the bode plot is drawn for
open loop system. The standard representation of the logarithmic magnitude of open loop transfer function of G(jω)
is 20 log G( j) where the base of the logarithm is 10. The unit used in this representation of the magnitude is the
decibel, usually abbreviated db. The curve are drawn on semi log paper, using the log scale (abscissa) for frequency
and the linear scale (ordinate) for either magnitude (in decibels) or phase angle (in degrees).
The main advantage of the bode plot is that multiplication of magnitudes can be converted into addition. Also a
simple method for sketching an approximate log-magnitude curve is available.
Determination of Phase and Gain Margin from Bode Plot
The gain margin in db is given by the negative of db magnitude of G(jω) at the phase cross-over frequency, ωpc.
The ωpc is the frequency at which phase of G(jω) is -1800. if the db magnitude of G(jω) at ωpc is negative then gain
margin is positive and vice versa. Let Φgc be the phase angle of G(jω) at gain cross over frequency wgc. The ωgc is
the frequency at which the db magnitude of G(jω) is zero. Now the phase margin, is given by, =1800+ Φgc . if Φgc
is less than -1800 then phase margin is positive and vice versa.
34 Format No. DCE/Stud/LM/34/Issue:00/Revision:01

Nyquist stability criterion:
If the G(S) H(S) contour in the G(S) H(S) plane corresponding to Nyquist contour in the s -plane encircles the point
(-1+j0) in the anticlockwise direction as many times as the number of half s-plan poles of G(S) H(S), then the closed
loop system is stable.
In examining the stability of linear control systems using the Nyquist stability criterion, the following three situations.
1. There is no encirclement of -1+j0 point. This implies that the system is stable if there are no poles of
G(S) H(S) in the right half s-plan. If there are poles on right half s-plane then the system is unstable.
2. An anticlockwise encirclement or (or encirclements) of -1+j0 point. In this case the system is stable if the
number of anticlockwise encirclement is same as the number of poles of G(S)H(S) in the right half s -
plane. If the number of encirclement is not equal to number of poles on right half s-plane then the system
is unstable.
3. There is a clockwise encirclement (or encirclements) of the -1+j0 point. In this case the system is always
unstable.
Root locus:
The root locus technique is powerful tool for adjusting the location of closed loop poles to achieve the desired
system performance by varying one or more system parameters.
Consider the open loop transfer function of system,
The closed loop transfer function of the system with unity feedback is given by,
Programmes & plots:
Example for transfer function:
% Root locus
% Bode plot
% Nyquist plot
35 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Model calculation:
Result:
Thus the stability of the given transfer function was analyzed using Bode plot, Root locus and Nyquist plot.
Outcome:
From this experiment student will able to analyze the stability of the given time domain and frequency
domain system.
Application: Root locus, Bode Plot, Nyquist Plot
Viva - Voce
1. Define Frequency Domain
2. Define Time Domain
3. Define Stability Analysis
4. Determine the effect of poles and zeros in stability analysis.
5. Define Stability
6. Define Linear Systems
7. What are the advantages of negative feedback system?
8. What are the advantages of closed loop system?
9. Define Transfer function
10. What is meant by gain cross over frequency?
11. What is meant by phase cross over frequency?
12. What is meant by gain margin?
13. What is meant by phase margin?
14. What is the effect of poles in stability of the system?
15. What is the effect of zeros in stability of the system?
16. What is meant by BIBO Stability?
36 Format No. DCE/Stud/LM/34/Issue:00/Revision:01

Expt. No. 12: DETERMINATION OF TRANSFER FUNCTION OF
SEPARATELY EXCITED DC GENERATOR
Aim:
To derive the transfer function of separately excited DC generator by conducting suitable experiment
Apparatus required:
Sl. No. Apparatus Name Range Type Quantity
1 Ammeter (0-2) A MC 1
(0-20) A MC 1
(0-10) A MI 1
2 Voltmeter (0-300) V MC 1
(0-150) V MI 1
3 Rheostat 2
4 Auto Transformer (0-270) V 1
Formula used:
XL = 2πfL
where is field impedance, is field resistance and is field reactance.
Transfer function at no load
Eg (s) / Vt (s) = Kg / ( Rf + SLf )
Transfer function at load
Vt (s) / Eg (s) = RL / ( Ra + RL )
37 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Transfer function for relating Vt (S) & Vf(S)
Theory:
The generated voltage is directly proportional to the field current
Eg α If
Eg = Kg If
Kg = Generator emf constant
Vf = RfIf + Lf dif/dt
Taking laplace transform Eg(s) = Kg If(s)
Vf(s) = Rf If(s) + s Lf If(s)
Vf(s) = (Rf +s Lf) If(s)
Transfer function
Eg (s) / Vt (s) = Kg / ( Rf + SLf )
Vt = Eg - IaRL
Vt (s) = Eg(s) - ILRa(s) IL(s) = Vt (s) / RL
Vt (s) = Eg(s) – VtRa(s)
RL
Vt (s) + Vt (s) Ra = Eg(s)
RL
Vt (s) / Eg (s) = RL / ( Ra + RL )
The transfer function rotating the output Vt(s) and input Vf(s) from equation
38 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
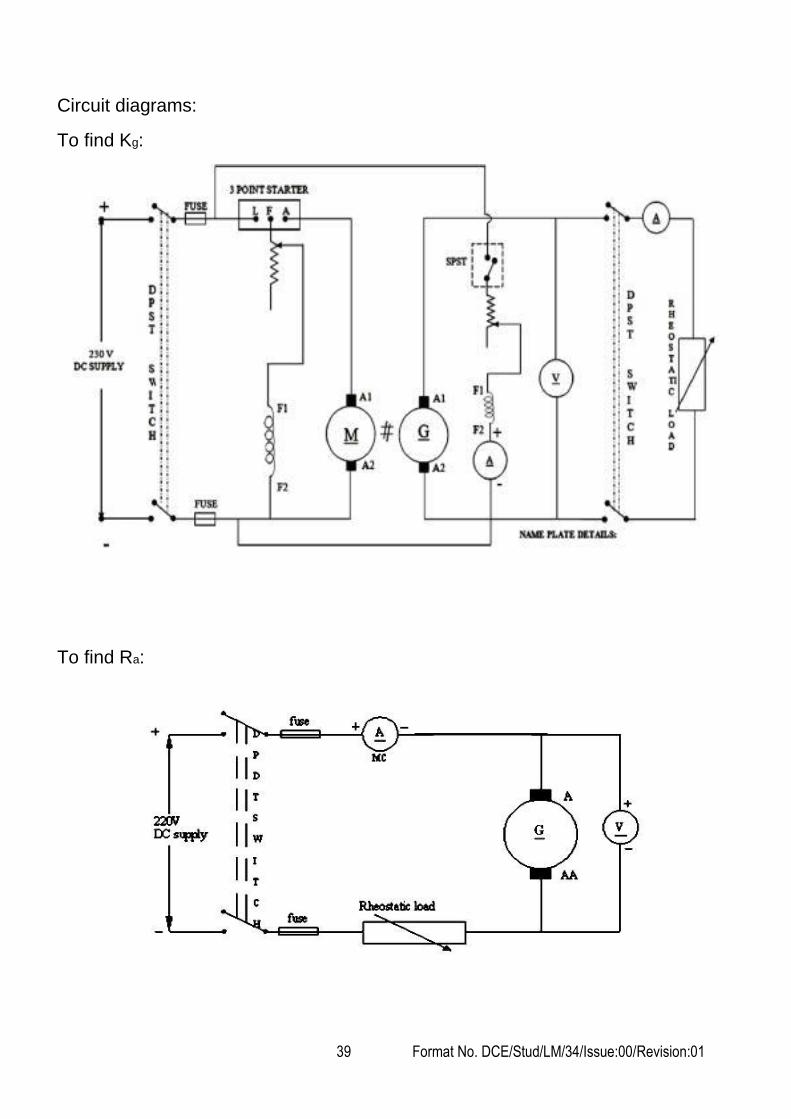
Circuit diagrams:
To find Kg:
To find Ra:
39 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
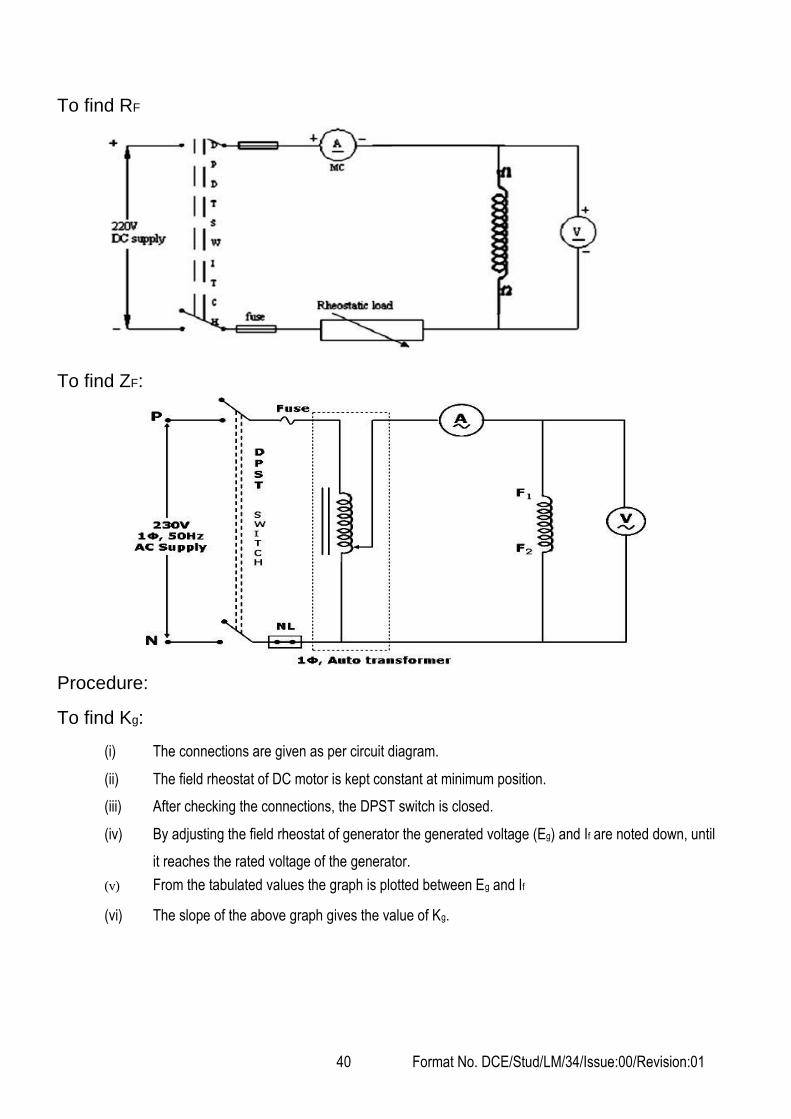
To find RF
To find ZF:
Procedure:
To find Kg:
(i) The connections are given as per circuit diagram.
(ii) The field rheostat of DC motor is kept constant at minimum position.
(iii) After checking the connections, the DPST switch is closed.
(iv) By adjusting the field rheostat of generator the generated voltage (Eg) and If are noted down, until
it reaches the rated voltage of the generator.
(v) From the tabulated values the graph is plotted between Eg and If
(vi) The slope of the above graph gives the value of Kg. 40 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
To find Zf:
(i) The connections are given as per circuit diagram.
(ii) Close the DPST switch.
(iii) By varying single phase auto transformer take different values of Vf and If.
(iv) By using the formula Zf = Vf / If, the average or mean value of Zf is calculated.
To find Rf:
(i) The connections are given as per circuit diagram Close the DPST switch
(ii) By varying the field rheostat from its maximum position, take different readings of Vf & If , until it
reaches the rated voltage(60%, 80% and 100% of the rated voltage)
(iii) The value of Rf is calculated by using the formula Rf = Vf / If
(iv) Find the average value of Rf
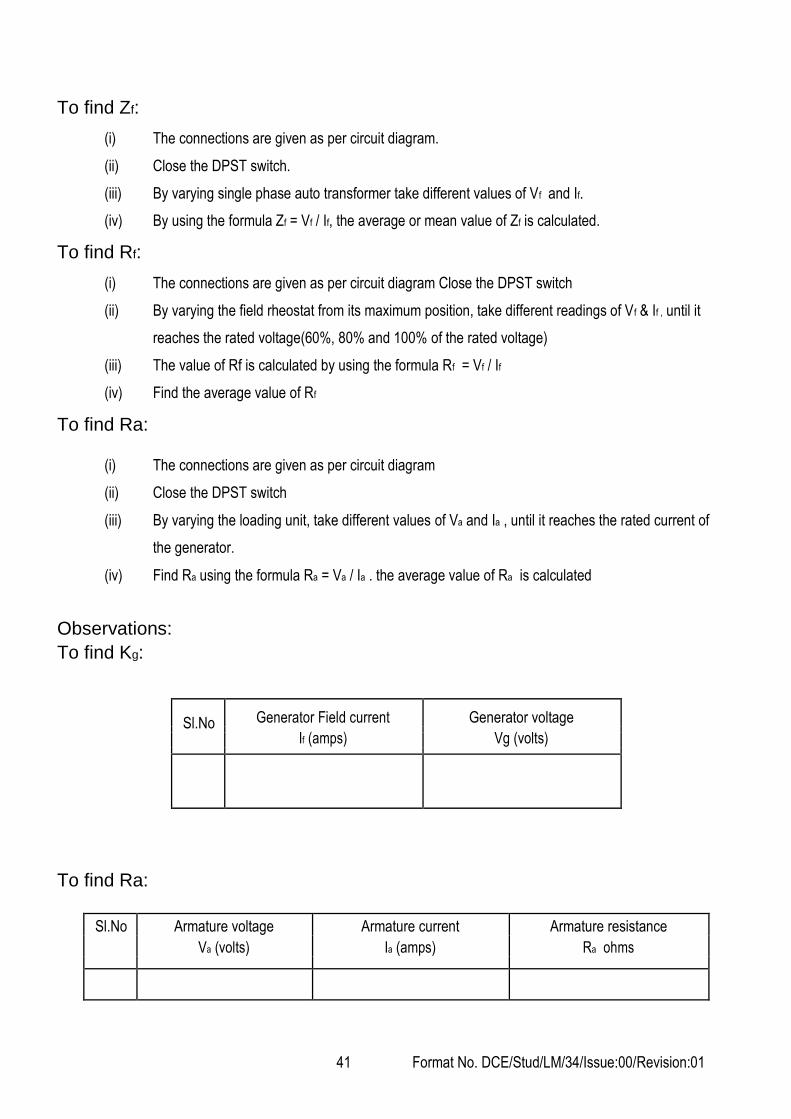
To find Ra:
(i) The connections are given as per circuit diagram
(ii) Close the DPST switch
(iii) By varying the loading unit, take different values of Va and Ia , until it reaches the rated current of
the generator.
(iv) Find Ra using the formula Ra = Va / Ia . the average value of Ra is calculated
Observations:
To find Kg:
Sl.No Generator Field current Generator voltage
If (amps) Vg (volts)
To find Ra:
Sl.No Armature voltage Armature current Armature resistance
Va (volts) Ia (amps) Ra ohms
41 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
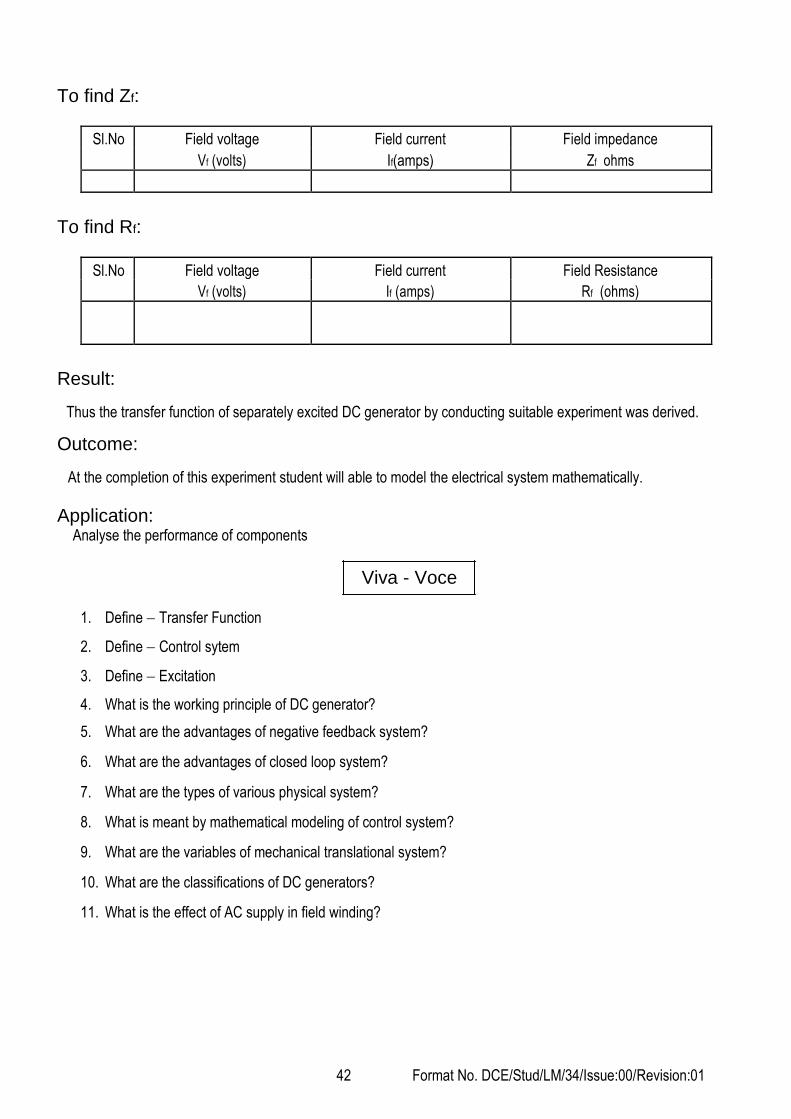
To find Zf:
Sl.No Field voltage Field current Field impedance
Vf (volts) If(amps) Zf ohms
To find Rf:
Sl.No Field voltage Field current Field Resistance
Vf (volts) If (amps) Rf (ohms)
Result:
Thus the transfer function of separately excited DC generator by conducting suitable experiment was derived.
Outcome:
At the completion of this experiment student will able to model the electrical system mathematically.
Application: Analyse the performance of components
Viva - Voce
1. Define Transfer Function
2. Define Control sytem
3. Define Excitation
4. What is the working principle of DC generator?
5. What are the advantages of negative feedback system?
6. What are the advantages of closed loop system?
7. What are the types of various physical system?
8. What is meant by mathematical modeling of control system?
9. What are the variables of mechanical translational system?
10. What are the classifications of DC generators?
11. What is the effect of AC supply in field winding?
42 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No.13: SIMULATION OF P, PI, PID CONTROLLERS
Aim:
To simulate P, PI, PID controller response for the first order and second order transfer function using MATLAB
software.
Apparatus required:
System with MATLAB 7.0.1
Theory:
The transient response of a practical control system often exhibits damped oscillation before reaching steady state
value. In specifying the transient response characteristics of control systems to unit step input, it is common to
specify the following:
i)Delay Time(Td)
ii) Rise time (Tr)
iii) Peal time ( Tp)
iv) Max. Overshoot (Mp)
v) Settling time (Ts)
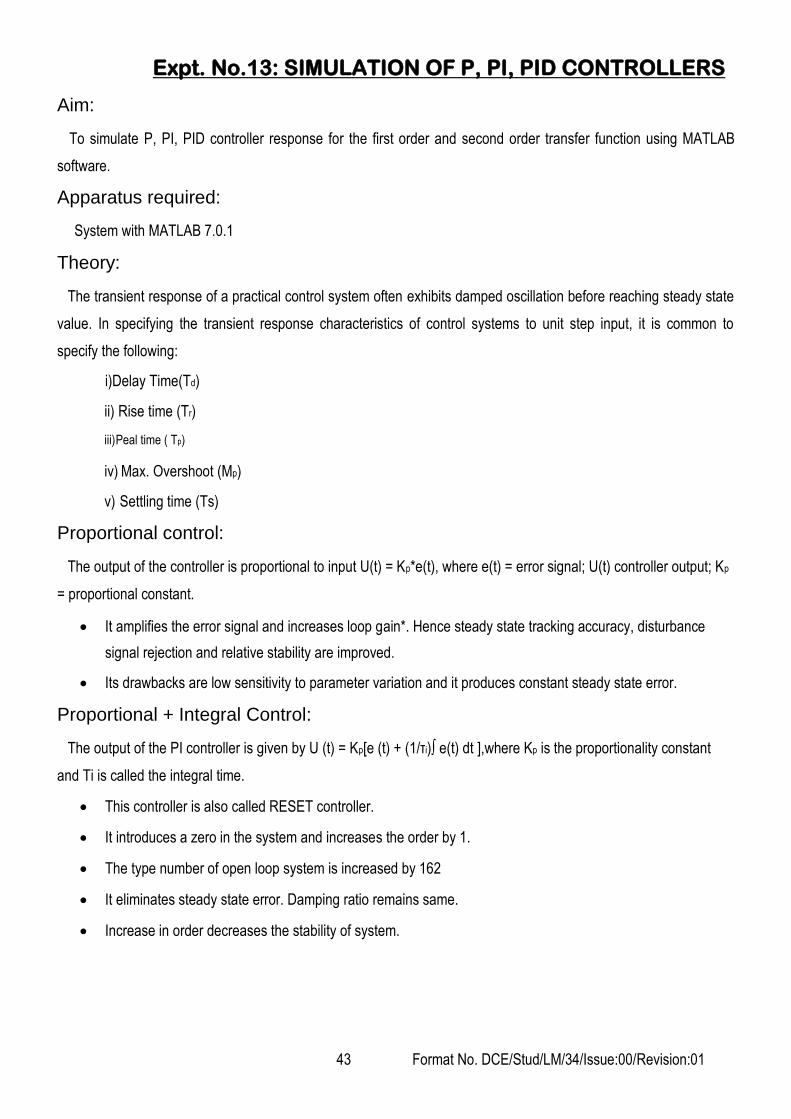
Proportional control:
The output of the controller is proportional to input U(t) = Kp*e(t), where e(t) = error signal; U(t) controller output; Kp
= proportional constant.
It amplifies the error signal and increases loop gain*. Hence steady state tracking accuracy, disturbance
signal rejection and relative stability are improved.
Its drawbacks are low sensitivity to parameter variation and it produces constant steady state error.
Proportional + Integral Control:
The output of the PI controller is given by U (t) = Kp[e (t) + (1/τi)∫ e(t) dt ],where Kp is the proportionality constant
and Ti is called the integral time.
This controller is also called RESET controller.
It introduces a zero in the system and increases the order by 1.
The type number of open loop system is increased by 162
It eliminates steady state error. Damping ratio remains same.
Increase in order decreases the stability of system.
43 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
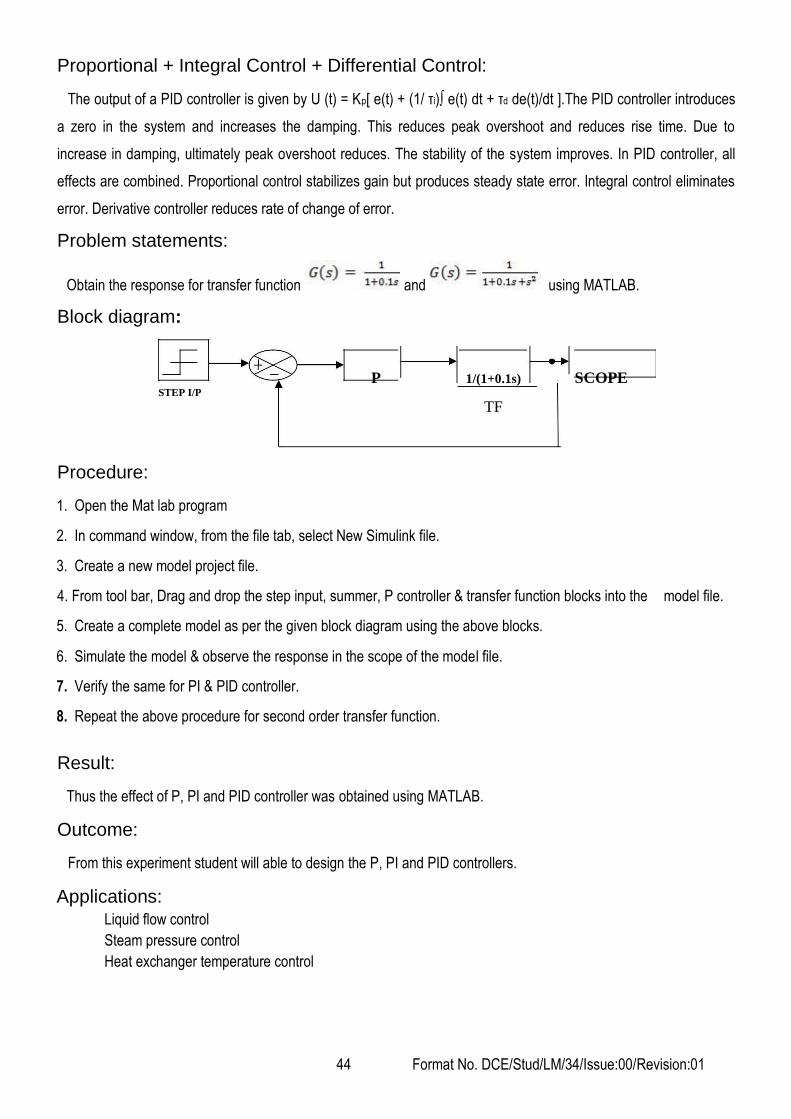
Proportional + Integral Control + Differential Control:
The output of a PID controller is given by U (t) = Kp[ e(t) + (1/ τi)∫ e(t) dt + τd de(t)/dt ].The PID controller introduces
a zero in the system and increases the damping. This reduces peak overshoot and reduces rise time. Due to
increase in damping, ultimately peak overshoot reduces. The stability of the system improves. In PID controller, all
effects are combined. Proportional control stabilizes gain but produces steady state error. Integral control eliminates
error. Derivative controller reduces rate of change of error.
Problem statements:
Obtain the response for transfer function and using MATLAB.
Block diagram:
P 1/(1+0.1s) SCOPE STEP I/P
TF
Procedure:
1. Open the Mat lab program 2. In command window, from the file tab, select New Simulink file. 3. Create a new model project file.
4. From tool bar, Drag and drop the step input, summer, P controller & transfer function blocks into the model file.
5. Create a complete model as per the given block diagram using the above blocks. 6. Simulate the model & observe the response in the scope of the model file. 7. Verify the same for PI & PID controller. 8. Repeat the above procedure for second order transfer function.
Result:
Thus the effect of P, PI and PID controller was obtained using MATLAB.
Outcome:
From this experiment student will able to design the P, PI and PID controllers.
Applications: Liquid flow control
Steam pressure control
Heat exchanger temperature control
44 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Viva - Voce
1. What is meant by controller? 2. What is the necessity of controller? 3. What is meant by proportional controller? 4. What is meant by integral controller? 5. What is integral control action? 6. What is meant by derivative controller? 7. What is meant by PI controller? 8. What is meant by PD controller? 9. What is meant by PID controller? 10. What is the effect of PI controller? 11. What is the effect of PD controller? 12. What is the effect of PID controller? 13. Why is ID controller impossible? 14. What is reset rate? 15. Why is derivative control not employed in isolation?
45 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Expt. No.: 14 AC SYNCHRO TRANSMITTER AND RECEIVER
Aim:
To measure the angle of rotating machine using AC synchro transmitter and receiver
Apparatus required:
Sl. No. Name of the Equipment Quantity
1 Synchro transmitter and receiver unit 1 Nos
2 Multimeter (Digital / Analog ) 1 Nos
3 Patch cords As required
Theory:
A synchro is an electromagnetic transducer commonly used to convert an angular position of a shaft into an
electric signal. It is commercially known as a selsyn or an autosyn. The basic synchro unit is usually called a
synchro transmitter. Its construction is similar to that of three phase alternator. The stator is of laminated silicon
steel and is slotted to accommodate a balanced three phase winding which is usually of concentric coil type
and star connected. The rotor is dumb bell construction and its wound with a concentric coil.
Thus it is seen that the input to the synchro transmitter is the angular position of its rotor shaft and the output
is a set of three signal phase voltages. The magnitudes of this voltage are function of the shift position. The
output of the synchro transmitter is applied to stator winding of synchro control transformer.
The control transmitter is similar in construction to a synchro transmitter except for the fact that rotor of the
control transformer in made cylindrical in shape so that the air gap is practically uniform. The system
(transmitter and control transformer pair) acts an error detector, circulating current to the same phase but of
different magnitudes flow through two stator coils. The result is establishment of an indentical flux pattern in the
air gap of the control transformer as the voltage drops in resistance and lockage reacta nce’s of two sets of
stator coils are usually small.
Observations:
Sl .No. Transmitter Receiver Vs1 – Vs2 Vs2 – Vs3 Vs3 – Vs1 Error (Degree) (Degree)
46 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
Procedure:
1. Make the connections as per the patching diagram.
2. Switch ON the supply.
3. Vary the shaft position of the transmitter and observe the corresponding changes in the shaft
position of the receiver.
4. Repeat the above steps for different angles of the transmitter.
5. Tabulated the different voltage at the test points of S1 S2, S3S2, and S3S1.
Result:
The angle of rotating machine using AC synchro transmitter and receiver was measured.
Outcome:
From this experiment student will able to understand the working of synchro transmitter and receiver.
Applications:
Error detection
Torque transmission
Viva - Voce
1. What is meant by synchro?
2. What is the working principle of synchro transmitter and receiver?
3. What is meant by servomechanism?
4. What is meant by electromotive force?
5. How is an emf induced in secondary of a transformer?
6. What are the applications of synchro?
7. What are the applications of servomotor?
8. What are the advantages of servo motor over stepper motor?
9. What are the advantages of closed loop system?
10. What are the advantages of negative feedback system?
47 Format No. DCE/Stud/LM/34/Issue:00/Revision:01
















![Dhanalakshmi Project[1]](https://img.pdfslide.us/doc/110x75/550055ad4a7959da6c8b50dd/dhanalakshmi-project1.jpg)












