Embed Size (px)
Citation preview

Development of a hybrid-electric propulsive systemmodel for Unmanned Aerial Systems
David [email protected]
Instituto Superior Tecnico, Universidade de Lisboa, Portugal
November 2019
Abstract
The growing economic and environmental pressure on aviation applications worldwide demand forinnovative concepts to decrease the emission footprint of future aviation vehicles while increasing theperformance. Since the beginning of the 21st century the research efforts by various public aeronauticalagencies and private companies has significantly increased. In this process hybrid-electric propulsion,distributed propulsion and novel aircraft concepts have emerged as technologies with a high potential tofulfil these requirements.In the aviation sector these concepts are relatively new and therefore the knowledge towards thesetechnologies needs to be deepened to maximize their performance. The hybrid-electric concept isgoing to be explored in depth with the development of a numerical simulation model in MATLAB for anUnmanned aerial vehicle propulsion system. The components are modeled with analytical and surrogatemodeling techniques. Afterwards a validation of the models with experimental data is performed andmodels with high accuracy are obtained. The propulsion module is managed by a rule-based controllerwith five operating modes. Furthermore it is equipped with the Ideal Operating Line energy managementstrategy to maximize the fuel efficiency of the aircraft. The advantages and disadvantages of thehybrid-system are explored in a surveillance mission analysis with the research aircraft QT1 for variouspropulsion system configurations.Keywords:Hybrid-electric propulsion, Unmanned Aerial Systems, Parallel Hybrid System, Ideal Operat-ing Line, Surrogate Model
1. Introduction
Aviation is a fast growing transport sector with anexpected passenger increase of 100% in the next20 years.[1] The environmental and health impactof air travel is a growing public concern. Publi-cations directly relate aviation with approximately16000 premature deaths yearly and 2-3% of theman-made CO2 emission.[2][3] Furthermore air-lines worldwide have not only to sustain their fleetsize, considering necessary replacements, but ex-pand it to satisfy the market’s demands. Re-cent projections of BOEING and AIRBUS predictaround 40000 new commercial aircraft sales inthis time-frame.[4][5] The NASA updated perfor-mance goals for aircraft with a market entrancedate around 2025 reflect those developments andthe growing economical pressure on airlines. Thefuel consumption of aerial vehicle should be re-duced by 50% compared to the best of class air-craft of the year 2005 and from 2020 on a carbon-neutral growth achieved.[1] New aircraft conceptsemploying innovative technologies to increase per-
formance, while decreasing emission are thus nec-essary.Researches identified technologies like hybrid-electric propulsion (HEPS), distributed propulsionand novel air-frame configurations as concepts toachieve greener aviation. Furthermore the devel-opment towards a more electric aircraft not onlydemands for powerful energy storage concepts butalso leads to new challenges for the thermal man-agement and the electrical system of an aircraft.The implementation in commercial aircraft is theultimate goal, but as most concepts are still rel-atively new, extensive studies in stepping stoneplatforms like Unmanned Aerial Vehicles (UAV) orsmall scale regional planes are necessary. There-fore a numerical model for a hybrid propulsion sys-tem is developed and validated with experimentaldata to deepen the understanding, map the perfor-mance and improve the efficiency of the propulsionsystem.The paper is structured as follows: section 2presents an introduction into HEPS including as-
1

(a) (b)
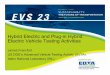
(c)Figure 1: Functional Scheme for: (a) Serial Hybrid System (adapted from [6]), (b) Parallel Hybrid System (adapted from [6]) and(c) Turobelectric Hybrid System (adapted from [7]
sociated energy storage concepts. Further a briefdescription and examples of the distributed propul-sion technology and novel air-frame configurationsare given. In section 3 the simulation models ofeach propulsion system component is developed.Afterwards the propulsion system model is assem-bled in section 4 and the operating strategies ofthe hybrid test bench are validated with the exper-imental data. The IOL energy management strat-egy and the propulsion system controller are de-scribed in section 5. In Section 6 the performanceof different propulsion systems is evaluated with asurveillance mission analysis.
2. Background
The mechanical configuration of the hybrid propul-sion system can be classified into the three maincategories series, parallel and turboelectric (seefigure 1) for small aerial vehicles. In the serialconfiguration the internal combustion engine (ICE)acts as an auxiliary power unit to charge the batter-ies via the generator. The rotational speed of thepropeller and the ICE are decoupled and thereforeit can always be operated at its most efficient point.Only the electric motor (EM) powers the propulsorof the aircraft and needs to be sized according tothe maximum required power. This leads to an ex-tra weight penalty in low energy demanding flightsegments like cruise. The energy losses along thepower flow due to the multiple energy conversionsteps effect the efficiency of the powertrain. In theparallel configuration on the other hand the ICEand EM are both directly connected to the propul-sor with a clutch. Furthermore the EM can alsobe used as a generator to recharge the battery.The advantages include downsized power sourcesand the given redundancy of the propulsion sys-tem. Because the rotational speeds of all compo-nents are linked it is necessary to integrate a con-tinuous variable transmission (CVT) to guaranteethe ICE is operating in its most efficient region. The
complexity of the propulsion system and control in-creases with this concept.[8] Compared to a seriesconfiguration the parallel concept is approximately10% lighter.[6] The turboelectric architecture is thethird hybrid-electric concept and is currently underinvestigation to be implemented in large regionalaircraft by the year 2035. In this configuration thepropulsion system is completely powered by a tur-bofan/turbojet which is directly connected to EMsand therefore no energy storage system is neces-sary.
Energy storage is vital for most hybrid-electricconfigurations and a challenging aspect as the en-ergy density of typical hydrocarbon fuels is around13000 Wh/kg.[9] Projects employing fuel cells ex-ist, but rechargeable batteries are favoured in theliterature due to operating and aircraft design flexi-bilities as well as energy output per second.[9][10]Lithium based batteries like Lithium polymer (Li-Po) and Li-Ion (Li-Io) are widespread in automotiveand aviation applications with energy densities be-tween 145 and 240 Wh/kg.[9] These energy den-sities are still two orders of magnitude lower thanthose of typical hydrocarbon fuels though. TheLithium-Air technology is emerging and presentsgreat potential with a theoretical specific energydensity of 11600 Wh/kg. The efficiency value of14.6% and a energy density of 1700 Wh/kg for theLithium-Air based battery would represent the av-erage tank-wheel efficiency of the current US carfleet, which is deemed achievable in the future.[11]
Compelling to the HEPS technology is the aero-dynamic efficiency of the aircraft, which can beimproved with distributed propulsion concepts ornovel air-frame configurations. Distributed propul-sion defines the beneficial span-wise distribution ofpropulsive thrust across the aircraft. In the NASAMaxwell X-57 project for example leading edgeasynchronous propellers are installed to increasethe lift during take-off and landing and thereforethe wing area could be significantly reduced.[12]
2

Because the conventional tube plus wing air-frameconcept is close to its performance maximum af-ter years of optimization new design ideas are nec-essary. Currently the blended wing body and thestrut-braced wing concepts are under investigation.These designs present better lift to drag ratios andlighter wings respectively compared to the conven-tional design.[13][14]
The great potential of the HEPS concept for im-plementation in an UAV plus available experimen-tal results for validation purposes from a previousresearcher favours additional research effort in thistechnology field.
3. MethodologyThe hybrid-electric propulsion module for the simu-lation consists out of standalone component mod-els for the propeller, the battery, the EM and theICE.
3.1. PropellerThe propeller can not be simulated with thewidespread Blade Element Momentum Theory(BEMT) due to the static nature of the test re-sults. The model is based on the propeller spe-cific curve of the thrust coefficient CT over the ro-tational speed. The outputs of the model are thepower coefficient Cp, the thrust coefficient CT andthe rotational speed of the propeller for the currentflight phase. Therefore a rpm vector, based on theoperational range of the propeller, is created andthe thrust for each step is determined. This loopis repeated until the relative thrust error is smallerthan 1% (see figure 2).
Figure 2: Flowchart for the propeller simulation model
3.2. BatteryThe battery model is adopted from a researchproject performed at the center for aerospaceresearch (CfAR), University of Canada. Be-cause in the UAV market the Li-Po technology iswidespread, due to high energy densities, this type
is implemented for the battery simulation. The bat-tery curve, governed by the exponential voltagecoefficient A, the exponential capacity coefficientβ and the polarity voltage K, was fully character-ized by 1A discharge experiments performed atCfAR. The charge (In < 0) and discharge curves(In > 0) are simulated with the equations 1 and 2respectively.[15]
V (It, In) = V0 −K ∗Q ∗ InIt + 0.1Q
− K ∗Q ∗ ItQ− It
+
A ∗ exp(−β ∗ It)] (1)
V (It, In) = V0 −K ∗Q ∗ InQ− It
− K ∗Q ∗ ItQ− It
+
A ∗ exp(−β ∗ It)] (2)
The maximum capacity is represented by Q, thecurrent during the timestep by It, V0 is the constantvoltage and V is the output voltage of the battery.
3.3. Electric MotorThe motor characteristics are simulated with therpm proportionality constant KV , the internal resis-tanceRm and the no load current I0. The rotationalspeed of the shaft wshaft is directly connected tothe electric motor force voltage Uemf . This param-eter is defined by the difference between the sup-plied voltage Um and the voltage drop across theinternal resistance. The losses in the motor are ac-counted for with the no load current and the internalresistance. In the equations 3 to 5 the governingrelations of the motor model are presented.[16]
Uemf = Um − Im ∗Rm (3)
wshaft = KV ∗ Uemf (4)
The torque output of the motor TEM is a functionof the motor input current Im.
TEM =Im − I0KV
(5)
In the hybrid test bench the AXI 4130/20 andthe respective motor constant are used for the EMmodel.[17] Furthermore the efficiency map of theEM is modeled depending on the supplied voltageand the requested torque from manufacturerdata.[18]
3.4. Internal Combustion EngineIn the hybrid test bench a 2-stroke DA-35 ICEmodel is installed. The modelling of the ther-modynamic processes in an ICE presents signif-icant challenges [19], however the focus of this
3

research project is on the realization of a com-plete hybrid propulsion model rather than only sin-gle components and therefore a different approachis pursued. In engineering applications like finitefluid dynamics scenarios with extensive modelingrequirements often arise and therefore Surrogateor Black-box models can be employed. In a dy-namometer experiment values for the DA-35 en-gine characteristics brake specific fuel consump-tion (BSFC) and power, depending on the throttleand rotational speed setting, were recorded by themanufacturer and presented in [18] by Machado.This data is used as the base for constructing amodel, which emulates the physics of the process.Radial basis functions (RBF) and the Kriging re-gressions are studied for this purpose due to theirproven performance. The Kriging method is im-plemented with the MATLAB toolbox Dacefit fromthe Technical University of Denmark and the RBFsimulation is based on a publication by Jekabsonsof the Technical University of Riga.[20][21] Thedata organization and preparation for the surrogatemodel significantly influences the bias and vari-ance of the simulation results. In the dynnamotertest the recorded test points are low dimensionaland uniformly distributed. Therefore a simple ran-dom sampling technique is deemed sufficient. Thesampled data will be split into test and valida-tion sets with the Hold-Out cross-validation (CV)method.[22] Afterwards the quality of the model isassessed via the prediction sum of squares vec-tor PRESS, presented in equation 6. Here p is thenumber of data points and e the CV error.[23]
PRESS =
√1
p∗ eT ∗ e (6)
In the evaluation the process is repeated 25times and the results are averaged to consider thevariation due to the random sampling technique.
4. ValidationThe operating modes of the propulsion module arevalidated with experimental data from a parallel hy-brid test bench developed by Machado [18] for theimplementation in an UAV.
4.1. EM only modeIn the EM only or Stealth mode the perfor-mance parameters for the simulation are the throt-tle and current prediction. Through a EM throttlesweep from 10% to 100% the validation data wasrecorded. The trend of the throttle prediction in thesimulation model is in agreement with the exper-iment as one can see from figure 3, however anabsolute error of ≈ 10% is noticed in the model.The EM is able to draw more current in the hy-brid test bench than in a simple EM-propeller setup
and therefore the equivalent circuit model overesti-mates the throttle setting. Regarding the currentthe simulation achieves results with large errors(≈ 40%) in low throttle regions. But because theseregions do not influence the state of charge (SoC)of the battery significantly and the model has goodaccuracy in high throttle regions (error lower than10%) the overall mode quality is deemed satisfying(see figure 3).
Figure 3: Simulation and experimental results for the EM onlymode
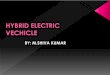
4.2. ICE only modeThe Kriging model is implemented in the ICE sim-ulation model as the results are of higher qualitycompared to the RBF method. The studied param-eters for the ICE only operating strategy are thethrottle and the fuel flow rate, recorded with weightmeasurements over time, of the engine. In the ex-periments the ICE values were recorded for throt-tle settings from 25% to 40%. The simulation trendfor the throttle setting matches the experiential val-ues, as observable from figure 4, although the ab-solute error of ≈ 15% is only present due to a throt-tle pin adjustment at CfAR (see figure 4), which isnot considered in the surrogate model. Becausethe fuel flow measurement was performed outside,environmental impacts (e.g wind and hot temper-atures) can influence the results. While the fuelflow trend is in agreement up to a rotational speedof ≈ 5700 rpm, the simulation does not predict thedecrease in inclination for higher operating speeds.This would correlate to a higher relative engine ef-ficiency as the power output increases. Howeverthe trend could also correlate to an measurementerror, due to an inaccurate fuel flow recording tech-nique (no flow meter), or the environmental im-pacts. The prediction error varies from ≈ 28% to≈ 4% for low and high throttle settings, respectively(see figure 4). Considering the complexity of theprocess and the inaccurate measuring techniquethe results of the ICE only mode are of satisfactoryquality.
4

Figure 4: Simulation results for the ICE only operating strategy
4.3. Hybrid modesThe hybrid modes Dash and Regenerative Brakeare the two most complex operating strategies,due to the interactions between the different powersources. In the experiment the ICE throttle waskept at an constant level of 40%, while the EMthrottle was swept from 0% to 60% and from 0% to-60% for the Dash and Regenerative Brake mode,respectively. The measurements did not recordany values for the fuel flow rate of the ICE andtherefore mainly the behaviour of the EM is vali-dated in these modes. The post processing of theexperimental data showed a significant variation intorque ICE output over the rotational speed. Thisbehaviour could only be modeled partly with thesurrogate model (see figure 5) and therefore is go-ing to influence the accuracy of the results.
Figure 5: Variation of the ICE torque output at 40% constantthrottle over the rotational speed for the Dash mode
The performance analysis parameters for bothmodes are the current and throttle settings of theEM. In the Regenerative Brake mode the analy-sis is extended to include the battery voltage aswell. The throttle setting of the EM is determinedin the hybrid modes by the definition presented by
Greisner in [24]. In the Dash operating mode theEM is ineffective for low throttle settings and there-fore draws more current from the battery than inthe EMonly mode (see figure 6). This behaviourresults in an exponential throttle increase in this re-gion. The simulation overpredicts the throttle rela-tion until a value of ≈ 30% for the EM is reached.Afterwards both trends show a fairly linear be-haviour up to a rotational speed of ≈ 5600 rpm,a further throttle increase only achieves insignifi-cant changes in operational speed. This phenom-ena could be attributed to a malfunction of the elec-tronic speed controller and is hard to model.
Figure 6: Motor current and throttle simulation results for theDash mode
The current prediction fails to model the exponen-tial current trend for low EM throttle settings as no-ticeable in figure 6. This results in relatively bigprediction errors ≈ 40 − 50% in these regions. Asthe EM is operated at higher throttle settings theerrors drops to acceptable values of +5% to -5%.Similar to section 4.1 the inaccurate regions do notsignificantly influence the SoC of the battery andtherefore accuracy of the model is good.The output torque variation for the Dash mode (seefigure 5) is intensified with the Regenerative Brakeoperating strategy further as stated in [18]. Thisbehaviour is problematic for the validation of theexperimental results and a simplified approach ischosen. The measured torque at the EM is directlyfed into the model. The current prediction has agood quality with a maximal error of ≈ 10% anda good trend correlation. However the EM throttletrend and the magnitude is at odds with the exper-imental results (see figure 7). The error is inducedas the maximum available EM torque increasesfaster, due an decrease in rotational speed, thanthe torque at the EM. This behaviour leads to andecrease in throttle rather than an increase. Theperformance of the propulsion system is not in-fluenced by this simulation error though, as it isonly integrated for analysis purposes. The last per-
5

formance parameter the battery voltage shows agood correlation trend to the recorded values (seefigure 7). The SoC of the battery is charged asthe battery voltage increases over the decrease inrotational speed.
Figure 7: Motor current and battery voltage Simulation resultsfor the Regenerative Brake mode
5. Energy Management Strategy and ControllerThe two power sources of the parallel hybridpropulsion system, created with the developedcomponent models, are managed by the propul-sion system controller and the energy manage-ment strategy. Due to its reliability and the suc-cessful implementation in multiple projects a rule-based control approach is used in this researchproject. In total five operating modes are definedfor the propulsion system (see table 1). The oper-ating modes of the propulsion system are selectedaccording to the three variables: the requiredpower Preq, the maximum EM power PEMmax andthe optimal power request Popt (see figure 8). TheICE operates at the optimal power request Popt toguarantee a smooth engine operation. The differ-ence in required power is either provided by the EM(Dash, Normal and Fuel Saving mode) or used tocharge the batteries (Charge mode). In the FuelSaving mode the ICE only operates at 80% of theoptimal power request to save fuel. The aircraft canalso be powered by only the EM with the Stealthmode, if the power requirement is small enough(< PEMmax) and the operational limits of the bat-tery (SoC> 15% and< 85%) are respected. Theselimits are included in the controller to achieve longbattery life and in case of engine failure power anemergency landing.
The energy management strategy should maxi-mize the performance of the UAV while increasingfuel economy and decreasing emissions. The idealoperating line (IOL) strategy theoretically enablesthe best performance of the ICE, while being op-erated at its most efficient point. The formulationof the IOL requires first an engine map with lines
Mode ICE EMNormal Popt Preq − Popt
Fuel saving 0.8 ∗ Popt Preq − 0.8 ∗ Popt
Dash PEMmax − Preq PEMmax
Charge Popt Preq − Popt
Stealth - Ptotal
Table 1: Characteristics for the operating modes of the UAVpropulsion system
of constant BSFC values. Afterwards, the inter-sections between these contour lines and curvesof constant power for the engine are computed.The intersection of the power lines with the low-est BSFC contour is the respective IOL data point(see figure 9).[25] As the engine data provided bythe manufacturer is not sufficient enough for theIOL determination, the surrogate models are usedto obtain extra inputs. The distribution of the IOLpoints favours interpolation for operation point in-stead of a fitted polynomial function.
Figure 9: IOL data points from the constant power and constantBSFC graphs
6. Mission AnalysisThe surveillance mission type is a widespread ap-plication for civil and military UAVs and is thereforegoing to be analyzed in the evaluation of the differ-ent propulsion system architectures. The aircraftendurance and range are the two most importantperformance parameters for these mission types.
Value UnitFlight altitude 300 [m]Target distance 50 [km]Climb angle 2-15 [◦]Descent angle - 5 [◦]
Electric Gas HybridFuel mass [kg] - 3.4 1.4Battery capacity [A.h] 40 - 10Take-off weight [kg] ∼ 26 ∼ 26 ∼ 26
Table 2: Surveillance mission characteristics and UAV configu-rations
The details of the flight scenarios are presented
6

Figure 8: Flowchart of propulsion system controller
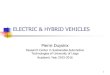
in table 2. The QT1 research fixed-wing UAV de-signed at CfAR is the employed aircraft. The emptymass of the aerial vehicle is 16.34kg and it is ca-pable of carrying a payload up to 3.5kg. In themission analysis four configurations are analyzedthe Electric, the conventional Gasoline and two hy-brid versions Hybrid1 and Hybrid2. Hybrid1 hasthe classic parallel configuration without a trans-mission, therefore it has no implemented energymanagement strategy, while the Hybrid2 versionis modeled with an transmission and the accord-ing IOL strategy. The MTOW of each configura-tion needs to be similar to guarantee comparabil-ity, thus the energy levels vary (see table 2). In theevaluation the small impact of the climb angle onthe loiter time (< 3%) is proven. The Electric con-figuration is only able to achieve climb angles upto 9.25◦, while the other propulsion systems canachieve angles up to 20◦. At the start of the evalu-ation the optimal power request Popt of the hybrid-electric controller is based on the mean power re-quest in the Electric configuration. In order to ob-tain the maximum performance this parameter isswept between 112 and 270W for the two hybridconfigurations. The results are fitted with a poly-nomial regression of the 3rd and 5th order for theHybrid1 (opt. 152W) and Hybrid2 (opt. 121W),respectively, and are fed into the controller. Theresults of the endurance analysis for the four con-figurations are presented in figure 10. The Elec-tric configurations is able to achieve a loiter time of287 minutes. This endurance value is only a frac-tion (13%) of the Gasoline version (2133 minutes).In case of low endurance requirements or neces-sary stealth operation the Electric propulsion sys-tem still presents to be a viable solution. The hy-brid system with an extra transmission and IOL en-ergy management strategy (Hybrid2) outperformsthe Hybrid1 configuration by ≈ 28% for a loiter timeof 997 minutes. Therefore the Hybrid2 configura-
Figure 10: Maximum achievable loiter time in the baseline mis-sion for each configuration
tion could reduce the amount of fuel by 60% andstill achieve 48% of the endurance. In the next stepthe range analysis is performed with a prescribedloiter time of 120 minutes. In this simulation thetrends from the endurance examination continue(see figure 11). The Electric propulsion systemachieves with 133km only 8% of the dash distancefrom the Gasoline type. The potential of the parallelhybrid configuration using the IOL strategy is em-phasized again as 46% of the dash distance com-pared to the Gasoline version could be achievedwith the same fuel reduction as previously men-tioned. In this analysis type the Hybrid2 outper-forms the classic parallel hybrid configuration byeven a larger margin of 46%.
7. ConclusionsA numerical model for a parallel hybrid-electricpropulsion system of an UAV and the results of amission analysis were provided. In the first stepthe simulation model for each component of thepropulsion system was separately developed. Af-terwards the models were validated in different op-erating strategies of the system with experimen-
7

Figure 11: Maximum achieveable dash distance for eachpropulsion type with 120min of prescribed loiter time
tal data from a previous researcher. The propul-sion system was equipped with a rule-based con-troller and the IOL energy management strategy forthe ICE. Therefore the complete propulsion mod-ule can be implemented into any airframe simula-tion model. The different propulsion systems wereevaluated in a surveillance mission analysis withthe focus on the endurance and the range of theaircraft. The parallel hybrid configuration with anengine transmission and therefore the IOL strategyshowed the greatest potential for greener aviation.Through this propulsion configuration the burnedfuel could be reduced by 60%, while still providingbetween 46-48% of the performance.Future works related to this research project arean extensive experimental test campaign, the im-plementation of a serial hybrid propulsion configu-ration and the development of more sophisticatedenergy management strategies. The additional ex-perimental data is needed to tune the models andsimulate the interactions of the power source in thehybrid modes more accurately. Through an addi-tional generator model a serial hybrid architecturecould be developed and its performance studied.The energy management strategy and the coupledcontroller provide efficient use of the available en-ergy on board. However more sophisticated con-trol approaches like fuzzy or neural network logiccould minimize the energy consumption of the UAVfurther.
References[1] NASA, “NASA Aeronautics: Strategic Im-
plementation Plan,” Washington, DC, UnitedStates, Tech. Rep., 2017.
[2] S. H. L. Yim, G. L. Lee, I. H. Lee, F. All-roggen, A. Ashok, F. Caiazzo, S. D. Eastham,R. Malina, and S. R. H. Barrett, “Global, re-gional and local health impacts of civil aviation
emissions,” Environmental Research Letters,vol. 10, no. 3, p. 034001, feb 2015.
[3] J. Hupe, B. Ferrier, T. Thrasher, C. Mustapha,N. Dickson, T. Tanaka, P. Novelli, S. Brand,R. Sceponaviciute, S. Ananthanarayan et al.,“Icao environmental report: 2013 destinationgreen-aviation and climate change,” ICAO En-vironmental Branch, Montreal, Canada, 2013.
[4] AIRBUS, “Global market forecast: Cities,airports and aircraft 2019 - 2038,” 2018,https://www.airbus.com/content/dam/corporate-topics/strategy/global-market-forecast/GMF-2019-2038-Airbus-Commercial-Aircraft-book.pdf, Last accessed on 27.10.2019.
[5] BOEING, “Boeing commercial mar-ket outlook 2019–2038,” 2018,https://www.boeing.com/resources/boeingdot-com/commercial/market/commercial-market-outlook/assets/downloads/cmo-sept-2019-report-final.pdf, Last accessed on27.10.2019.
[6] J. Matlock, S. Warwick, P. Sharikov,J. Richards, and A. Suleman, “Evaluationof energy efficient propulsion technologiesfor unmanned aerial vehicles,” in CSMEInternational Congress, Toronto, Canada,2018.
[7] C. L. Bowman, J. L. Felder, and T. V.Marien, “Turbo- and hybrid-electrified aircraftpropulsion concepts for commercial trans-port,” in AIAA/IEEE Electric Aircraft Tech-nologies Symposium (EATS), Cincinnati, OH,United States, 2018.
[8] A. B. Francisco, “Implementation of an idealoperating line control stratgey for hybrid elec-tric vehicles,” Ph.D. dissertation, University ofCalifornia, Davis, CA, United States, 2002.
[9] J. Sliwinski, A. Gardi, M. Marino, and R. Saba-tini, “Hybrid-electric propulsion integration inunmanned aircraft,” Energy, vol. 140, pp.1407 – 1416, 2017.
[10] A. Gong and D. Verstraete, “Fuel cell propul-sion in small fixed-wing unmanned aerial ve-hicles: Current status and research needs,”International Journal of Hydrogen Energy,vol. 42, no. 33, pp. 21 311–21 333, 2017.
[11] G. Girishkumar, B. McCloskey, A. C. Luntz,S. Swanson, and W. Wilcke, “Lithium- air bat-tery: promise and challenges,” The Journal ofPhysical Chemistry Letters, vol. 1, no. 14, pp.2193–2203, 2010.
8

[12] A. M. Stoll, J. Bevirt, M. D. Moore, W. J.Fredericks, and N. K. Borer, “Drag reduc-tion through distributed electric propulsion,”in 14th AIAA Aviation Technology, Integra-tion, and Operations Conference, Atlanta, GA,United States, 2014.
[13] B. J. Brelje and J. R. Martins, “Electric, hybrid,and turboelectric fixed-wing aircraft: A reviewof concepts, models, and design approaches,”Progress in Aerospace Sciences, vol. 104, pp.1 – 19, 2019.
[14] F. Gern, A. Ko, B. Grossman, R. Haftka,R. Kapania, W. Mason, and J. Schetz, “Trans-port weight reduction through mdo: Thestrut-braced wing transonic transport,” in 35thAIAA Fluid Dynamics Conference and Exhibit,Toronto, Canada, 2005.
[15] J. Matlock, S. Warwick, D. J. Richards, andD. A. Suleman, “Performance evaluation of auav hybrid propulsion system,” CfAR, Univer-sity of Victoria, Tech. Rep., 2019.
[16] D. Lundstrom, K. Amadori, and P. Krus, “Val-idation of models for small scale electricpropulsion systems,” in 48th AIAA AerospaceSciences Meeting Including the New HorizonsForum and Aerospace Exposition, Orlando,FL, United States, 2010.
[17] M. MOTORS, “Axi 4130/20 goldline v2 technical specification,”http://w3techs.com/technologies/overview/con-tentlanguage/all, Last accessed on27.10.2019.
[18] L. Miguel Goncalves Machado, “Design anddevelopment of a hybrid electric propulsionsystem for unmanned aerial vehicles,” Mas-ter’s thesis, Instituo Superior Tecnico Lisboa,Portugal, 2019.
[19] M. Turesson, “Modelling and simulation of atwo-stroke engine,” Master’s thesis, Universityin Gothenburg, Gothenburg, Sweden, 2009.
[20] S. N. Lophaven, H. B. Nielsen, J. Sonder-gaard, and A. Dace, “A matlab kriging tool-box,” Technical University of Denmark, Tech.Rep., 2002.
[21] G. Jekabsons, “Rbf: Radial basis function in-terpolation for matlab/octave,” Riga TechnicalUniversity, Tech. Rep., 2009.
[22] Z. Reitermanova, “Data splitting,” in Pro-ceedings of the 19th Annual Conference ofDoctoral Students, Prague, Czech Republic,2010.
[23] F. A. Viana, R. T. Haftka, and V. Steffen,“Multiple surrogates: how cross-validation er-rors can help us to obtain the best predictor,”Structural and Multidisciplinary Optimization,vol. 39, no. 4, pp. 439–457, 2009.
[24] C. M. Greiser, “Implementation of a rule-based open-loop control strategy for a hybrid-electric propulsion system on a small rpa,”Master’s thesis, Air Force Institute of Tech-nology, Wright-Patterson Air Force Base, OH,United States, 2011.
[25] J. Hung and L. Gonzalez, “On parallel hybrid-electric propulsion system for unmannedaerial vehicles,” Progress in Aerospace Sci-ences, vol. 51, pp. 1 – 17, 2012.
9