Embed Size (px)
Citation preview

Deutsches Zentrum für Luft- und Raumfahrt e.V.
Institut für Physik der Atmosphäre http://www.dlr.de/ipa 03.05.23
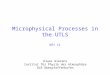
Case Study: 1st July 2010, 12:00 UTC + 1hFig. 1: Real Situation (COCS)
Fig. 2: Pixel-based Forecast
Fig. 3: Object-based Forecast
Fig. 4: Decaying Convective Cell
Cirrus Ice Optical Thickness (IOT) derived by COCS for the real situation (middle) compared to the object-based forecast (left) and the forecast with a decrease in IOT for decaying cells (right)
AbstractAn algorithm was developed to detect water and ice clouds and forecast their development for the next timesteps separately. Beside this, cloud properties like optical depth were derived and forecasted. The work is based on Meteosat SEVIRI (Spinning Enhanced Visible and Infrared Imager) data with a timestep of 15 minutes, on the Cb-TRAM, the COCS- and APICS- Algorithm. The aim is the prediction of Direct Normal Irradiance (DNI) for an optimized operation of concentrating solar technologies as part of the EU project DNICast.Detection and Nowcasting of Clouds In order to derive cloud cover, optical thickness and cloud top height of ice clouds “The Cirrus Optical properties derived from CALIOP and SEVIRI during day and night” (COCS) algorithm (Kox et al., 2014) is applied. For the determination of water clouds the APICS cloud masking algorithm (Bugliaro et al, 2011) is used, which is, in this case, based on seven threshold tests applied to several SEVIRI channels. It provides cloud cover, optical thickness and effective radius of water clouds.
.
References:Bugliaro, L., Zinner, T., Keil, C., Mayer, B., Hollmann, R., Reuter, M. and Thomas, W., Validation of cloud property retrievals with simulated satellite radiances: a case study for SEVIRI. Atmos. Chem. Phys., 11, 5603-5624, doi: 10.5194/acp-11-5603-2011. Kox, S., Bugliaro, L., Ostler, A., Retrieval of cirrus cloud optical thickness and top altitude from geostationary remote sensing, accepted in Atmos. Meas. Tech. Discuss., 2014Möhrlein, M., Nowcasting der Wolkenbedeckung für verschiedene Wolkenetagen auf Basis von Meteosatdaten zur Anwendung auf die Einstrahlungsprognose von Solarkraftwerken, Master Thesis, Ludwig-Maximilians-Universität München, 2013
Nowcasting of Clouds with MSG Tobias Sirch¹, Luca Bugliaro¹, Tobias Zinner²
¹Deutsches Zentrum für Luft- und Raumfahrt (DLR), Institut für Physik der Atmosphäre, Oberpaffenhofen, Germany²Meteorologisches Institut München, Ludwig-Maximilians-Universität (LMU), München, Germany
Distinction of Convective and Advective CloudsAs can be seen in Figure 3, a major challenge lies in the forecasting of convective clouds and especially of newly developing cells. For this reason the detected clouds are divided into two groups, convective and advective, and afterwards treated separately. The forecast of advective clouds takes place with the method described above. For the detection of convective clouds, detection methods of Cb-TRAM (CumulonimBus TRacking And Monitoring, Zinner et al., 2008) are implemented, which divides convection into three stages. At the moment only stage 3 (detection of mature cells) is applied and each detected cell is classified as one object according to the described method. In addition, cells with a certain decrease in size and ice optical thickness (IOT) are treated as decaying cells and will be forecasted with an additional and more realistic decrease in optical thickness. Figure 4 shows a sector of the original image with a decaying cell (red box). The object-based forecast (left) predicts a larger ice optical thickness than it is in reality (middle). With a treatment of the object as a decaying cell, we see a decrease in ice optical thickness (right). This is important for the correct calculation of the DNI and hence for the efficiency of power plants as they start working profitable at a certain value of irradiance.OutlookOur next step is to implement the Meteosat Rapid Scanning Service (RSS) with a temporal resolution of 5 minutes as this gain of information will help improving our forecast. To reach a better spatial resolution we will use the broadband high resolution visible (HRV) channel.
Ice O
ptica
l Th
ickne
ssIce
Opt
ical
Thick
ness
Ice O
ptica
l Thi
ckne
ss
The forecast of advective clouds basically takes place with an optical flow method determining a motion vector field from two consecutive images (Zinner et al., 2008). As shown in Figure 2 a 1-hour forecast, started on 1st July 12:00 UTC, becomes messy within a short period of time compared to the real situation at the same time (Fig. 1), because of small-scale motion vectors, which may differ widely in direction and absolute value for neighboring pixels. The clouds are therefore classified as objects with similar properties and all motion vectors within these objects are averaged. Hence the whole object will be shifted with this mean motion vector to improve the forecast. Additionally a weighted interpolation of the motion vectors between the clouds is applied (Möhrlein, 2013). Figure 3 shows the improved forecast after applying the object classification and the weighted interpolation.
Zinner, T., Mannstein, H., Tafferner, A., CB-TRAM: Tracking and Monitoring severe convection from onset over rapid development to mature phase using multi-channel Meteosat-8 SEVIRI data, Meteor. and Atmos. Phys., 101, 191-210, doi: 10.1007/s00 703-008-0290-y, 2008











![Institut für Physik der Atmosphäre Current Version; CCM E39/C Future: ECHAM5/MECCA Surface, aircraft, lightning NO x Emissions [Tg N/a] Radiation Long-wave](https://img.pdfslide.us/doc/110x75/55204d8149795902118d456a/institut-fuer-physik-der-atmosphaere-current-version-ccm-e39c-future-echam5mecca-surface-aircraft-lightning-no-x-emissions-tg-na-radiation-long-wave.jpg)