Embed Size (px)
DESCRIPTION
DETECTOR ALIGNMENT with tracks. OUTLINE. Why do we need software alignment Principle of Chi2 minimization Local, iterative approach with 5-6 parameters solved at a time Example – the experiment NA57 silicon telescope Global alignment method with ALL parameters solved simultaneously - PowerPoint PPT Presentation
Citation preview
Catania November 2006 Adam Jacholkowski 1
DETECTOR ALIGNMENTwith tracks
Catania November 2006 Adam Jacholkowski 2
OUTLINE
Why do we need software alignment Principle of Chi2 minimization Local, iterative approach with 5-6 parameters solved
at a time Example – the experiment NA57 silicon telescope Global alignment method with ALL parameters
solved simultaneously Utility of cosmic muons for detector pre-alignment,
example of the ALICE ITS detector Summary and discussion
Catania November 2006 Adam Jacholkowski 3
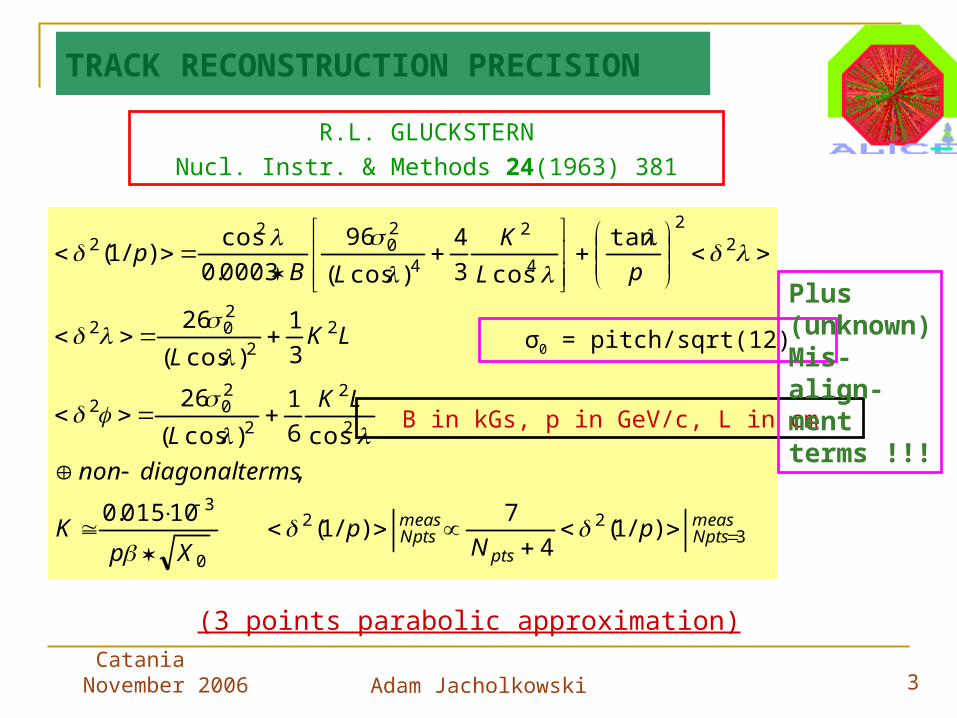
TRACK RECONSTRUCTION PRECISION
measNpts
pts
measNpts p
Np
XpK
termsdiagonalnon
LK
L
LKL
pL
K
LBp
322
0
3
2
2
2
202
22
202
22
4
2
4
20
22
)/1(4
7)/1(
10015.0
,
cos6
1
)cos(
26
3
1
)cos(
26
tan
cos3
4
)cos(
96
0003.0
cos)/1(
(3 points parabolic approximation)
B in kGs, p in GeV/c, L in cm
σ0 = pitch/sqrt(12)
R.L. GLUCKSTERN
Nucl. Instr. & Methods 24(1963) 381
Plus(unknown)Mis-align-mentterms !!!
Catania November 2006 Adam Jacholkowski 4
Why do we need software alignment Hardware alignment techniques (optical, photogrametry,
X rays etc) have technological limits 50 -100 microns Geometrical resolution of the modern detectors (like
pixels) as good as about 10 -15 microns High tracking precision necessary in order to reach
physics goals of the experiments ( for ex. heavy flavours) The only practical method to reach the required precision
– use of (high momentum) tracks A general principle – minimize the track residues but
keeping some external (physics wise) constraints
Catania November 2006 Adam Jacholkowski 5
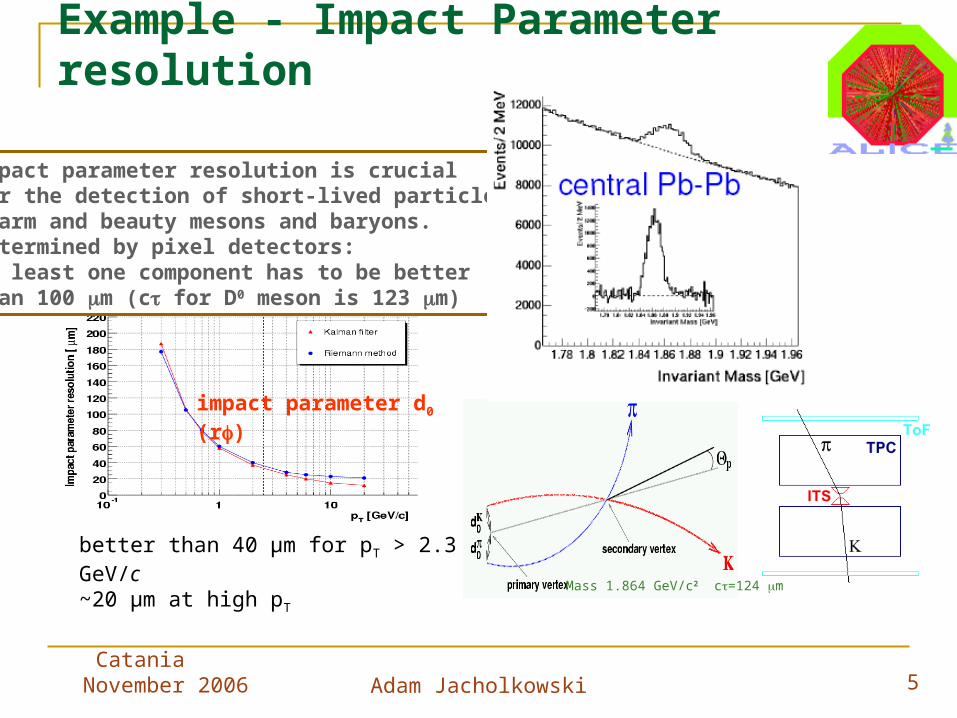
Example - Impact Parameter resolution
better than 40 µm for pT > 2.3 GeV/c~20 µm at high pT
impact parameter d0 (r)
Impact parameter resolution is crucialfor the detection of short-lived particles:charm and beauty mesons and baryons.Determined by pixel detectors:at least one component has to be better than 100 m (c for D0 meson is 123 m)
Mass 1.864 GeV/c2 c=124 m
Catania November 2006 Adam Jacholkowski 6
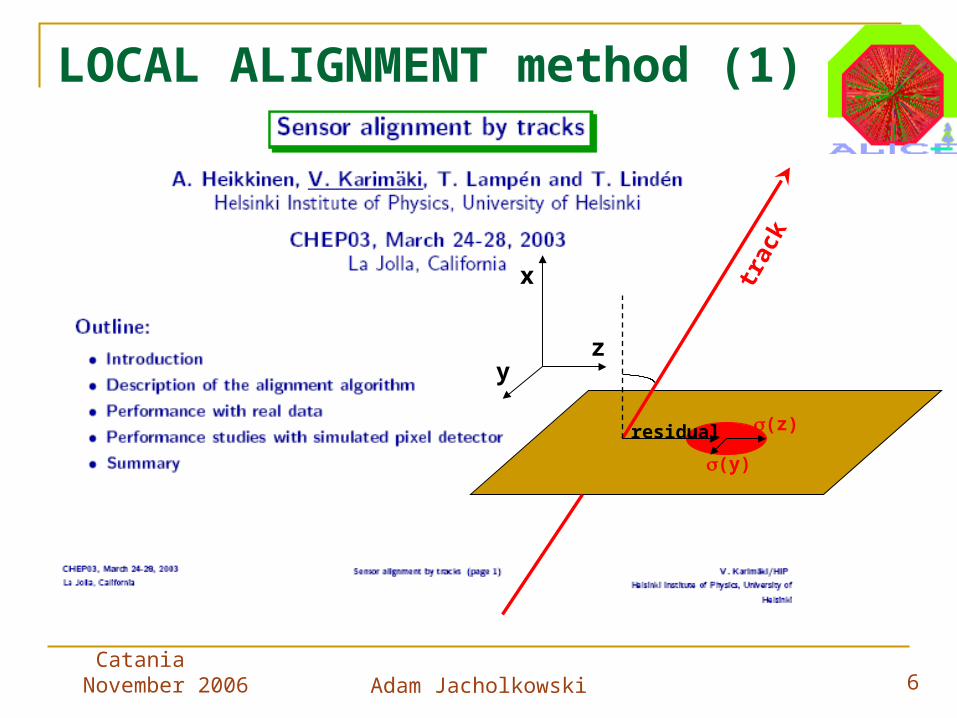
LOCAL ALIGNMENT method (1)
x
zy
(z)
(y)
residual
trac
k
Catania November 2006 Adam Jacholkowski 7
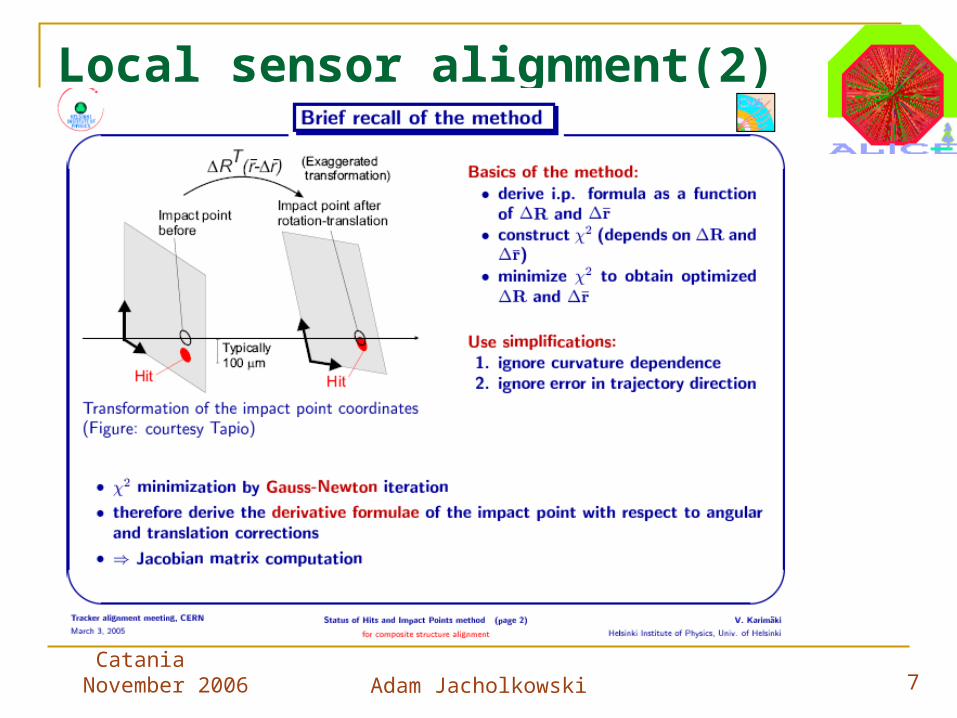
Local sensor alignment(2)
Catania November 2006 Adam Jacholkowski 8
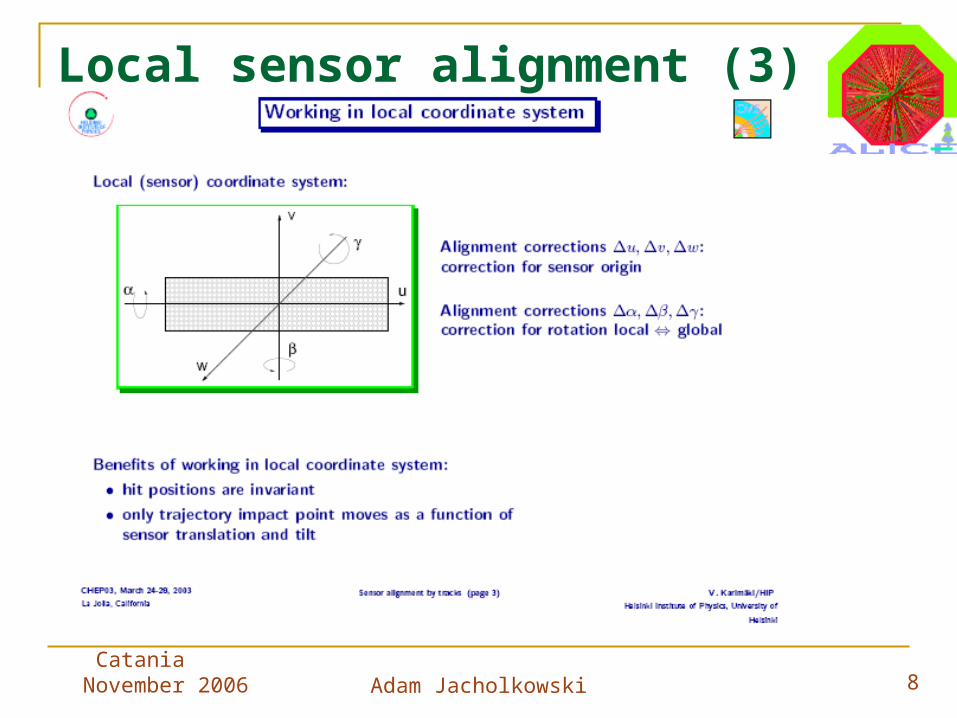
Local sensor alignment (3)
Catania November 2006 Adam Jacholkowski 9
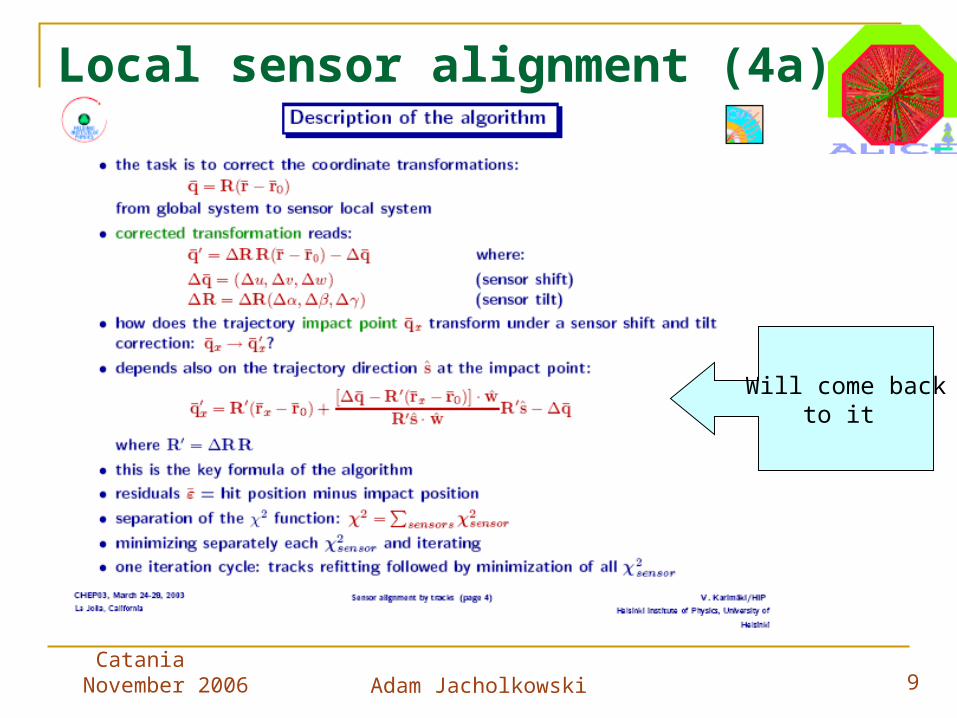
Local sensor alignment (4a)
Will come backto it
Catania November 2006 Adam Jacholkowski 10
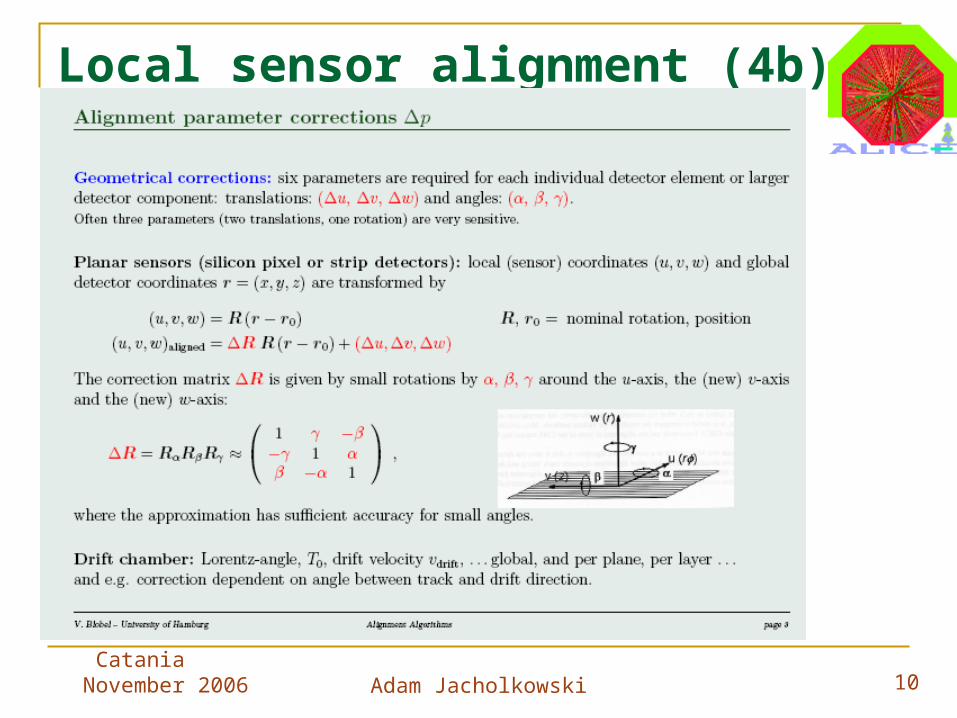
Local sensor alignment (4b)
Catania November 2006 Adam Jacholkowski 11
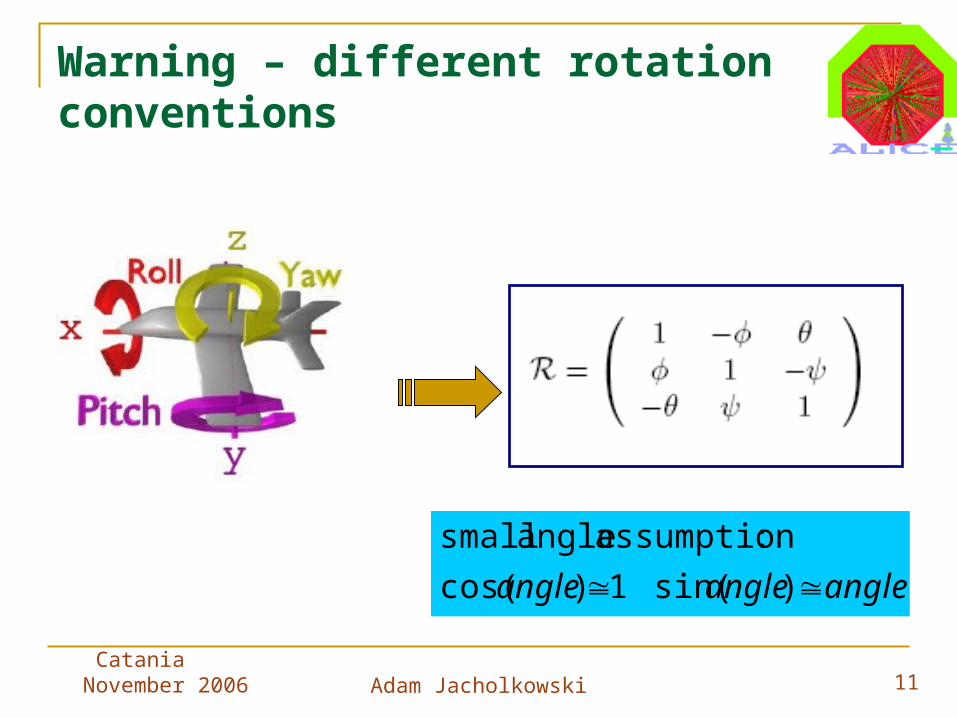
Warning – different rotation conventions
angleangleangle )sin(1)cos(
:assumption angle small
Catania November 2006 Adam Jacholkowski 12
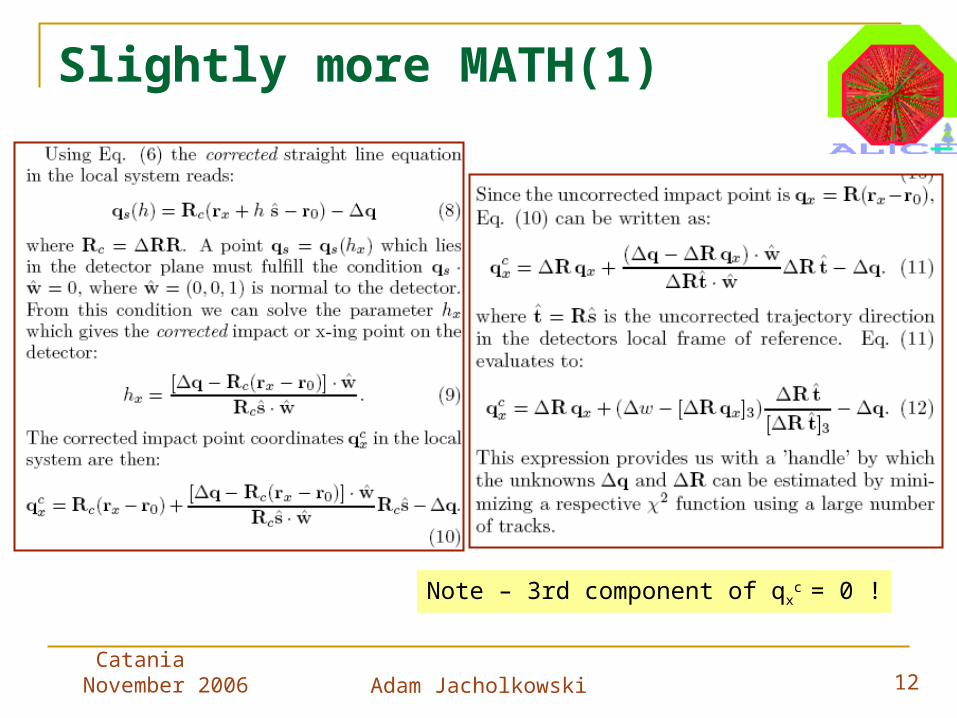
Slightly more MATH(1)
Note – 3rd component of qxc = 0 !
Catania November 2006 Adam Jacholkowski 13
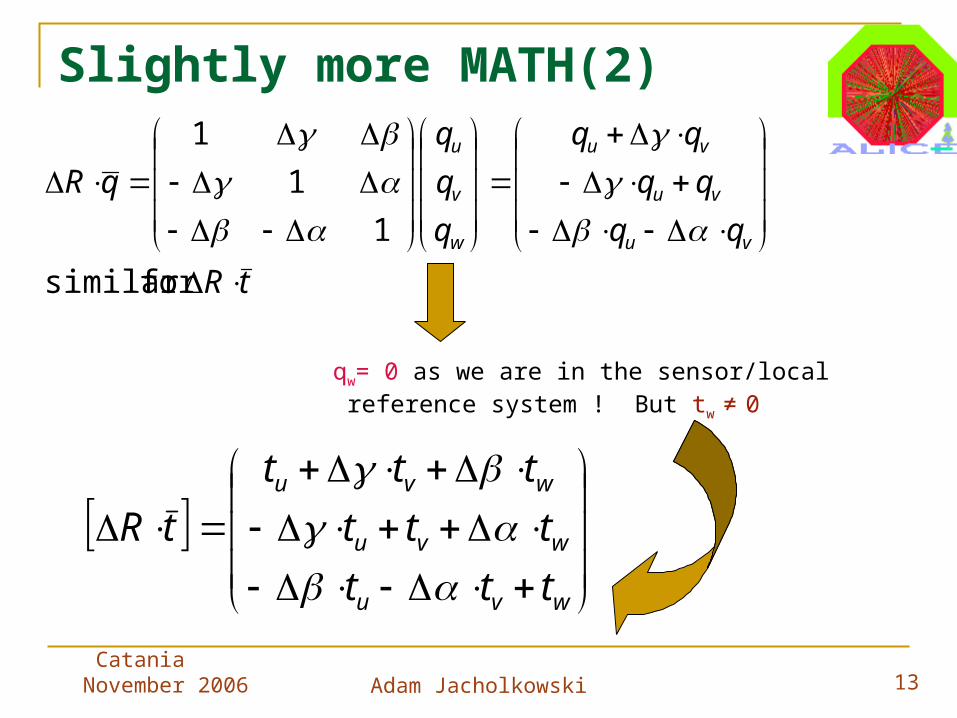
Slightly more MATH(2)
tR
q
q
q
qR
vu
vu
vu
w
v
u
for similar
1
1
1
qw= 0 as we are in the sensor/local reference system ! But tw ≠ 0
wvu
wvu
wvu
ttt
ttt
ttt
tR
Catania November 2006 Adam Jacholkowski 14
w
v
defw
u
defuv
corrw
uvw
wuvuv
corrv
uvw
wvuvu
corru
t
t
t
tqqw
q
vttt
tttqqq
uttt
tttqqq
tan,tan,
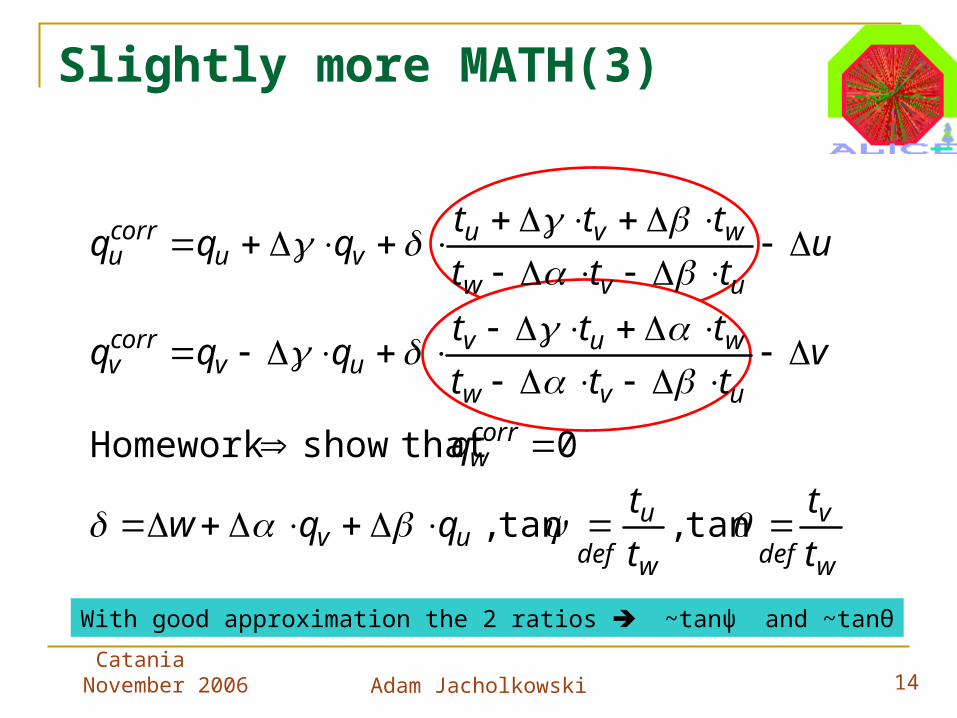
0 that showHomework
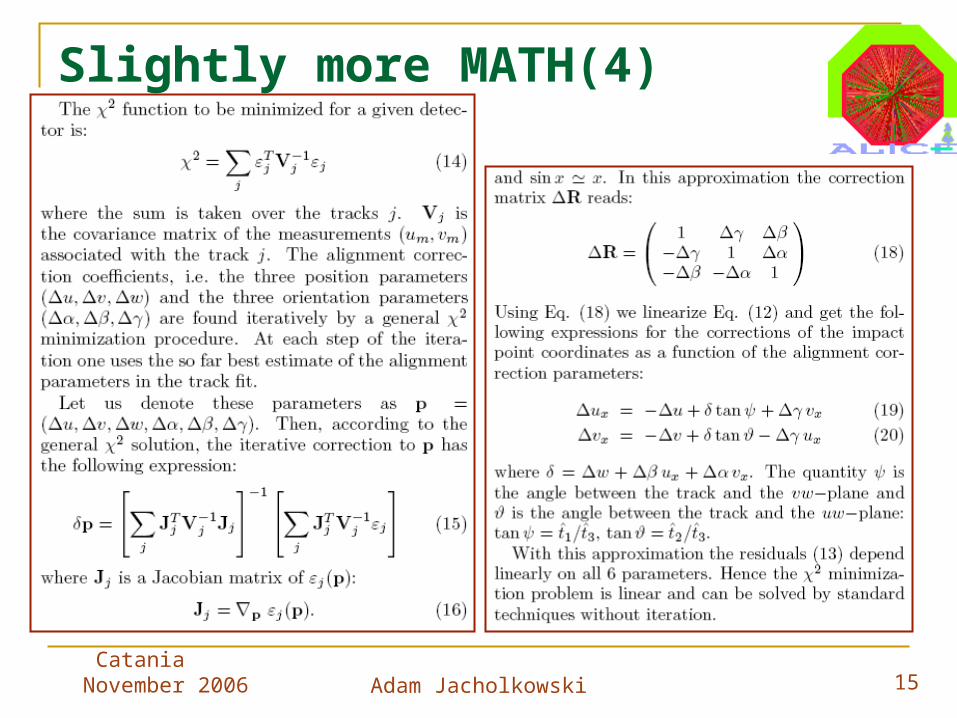
Slightly more MATH(3)
With good approximation the 2 ratios ~tanψ and ~tanθ
Catania November 2006 Adam Jacholkowski 15
Slightly more MATH(4)
Catania November 2006 Adam Jacholkowski 16
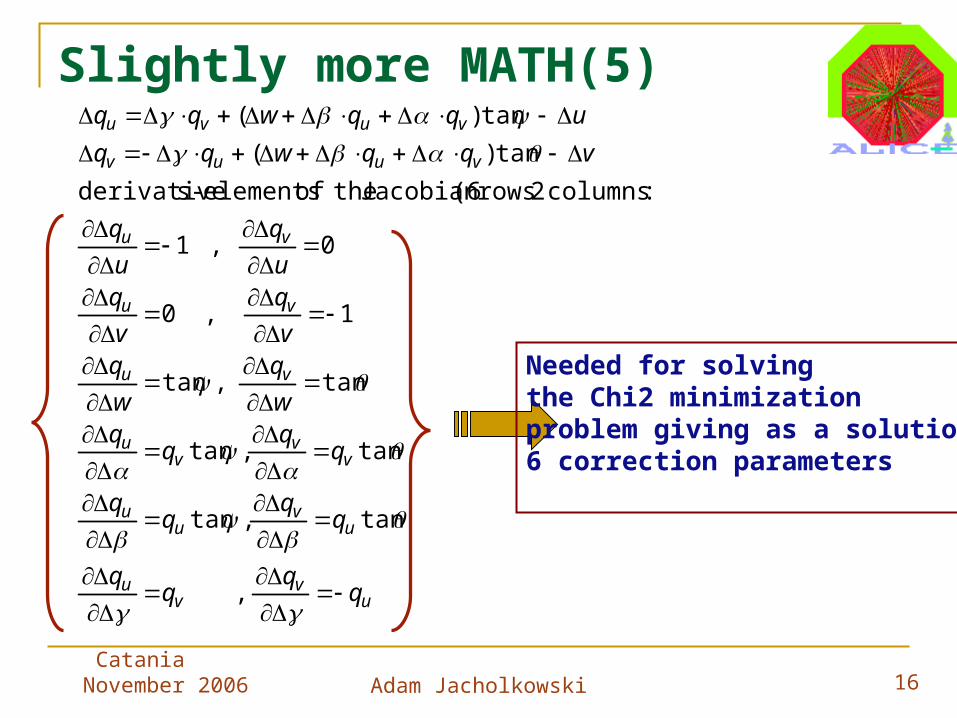
Slightly more MATH(5)
uv
vu
uv
uu
vv
vu
vu
vu
vu
vuuv
vuvu
w
q
w
qv
q
v
qu
q
u
q
vqqwqq
uqqwqq
,
tan,tan
tan,tan
tan,tan
1,0
0,1
:columns) 2 rows (6Jacobian theof elements - sderivative
tan)(
tan)(
Needed for solvingthe Chi2 minimizationproblem giving as a solution6 correction parameters
Catania November 2006 Adam Jacholkowski 17
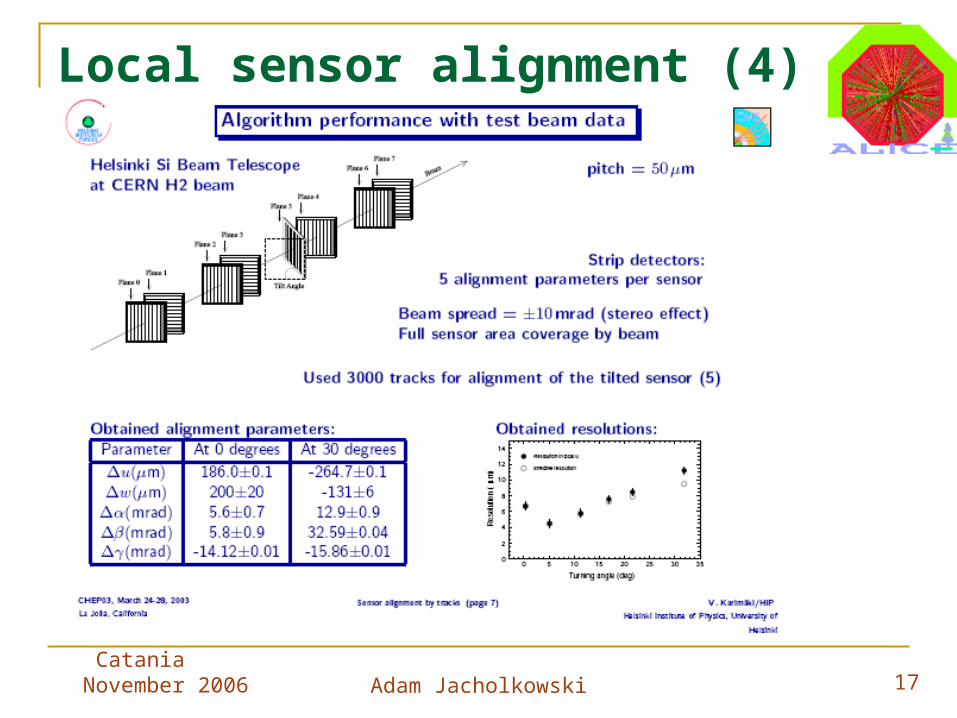
Local sensor alignment (4)
Catania November 2006 Adam Jacholkowski 18
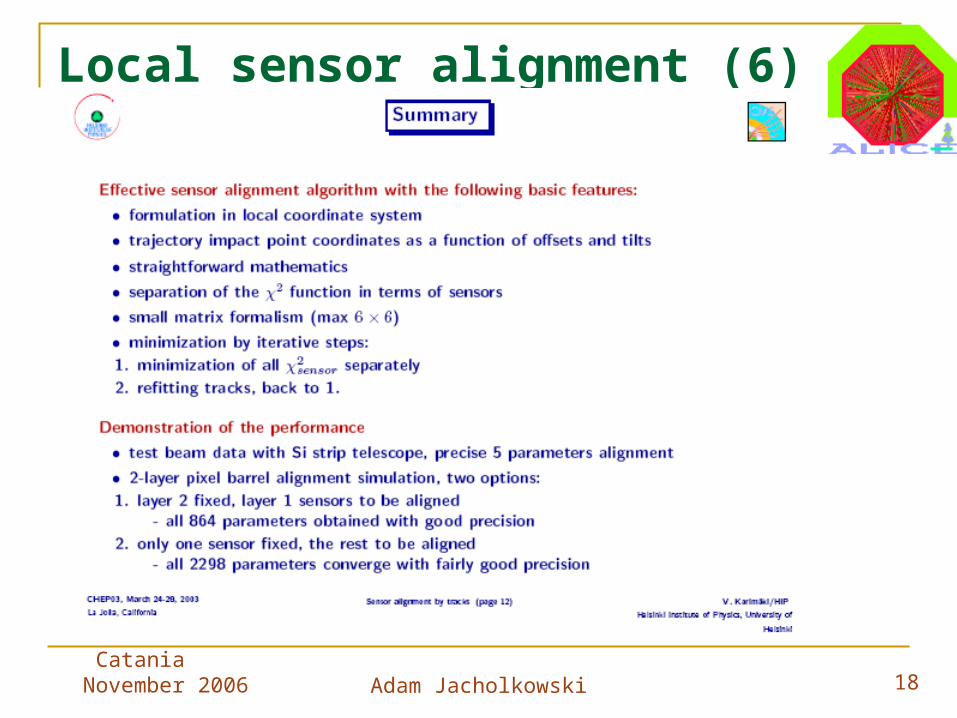
Local sensor alignment (6)
Catania November 2006 Adam Jacholkowski 19
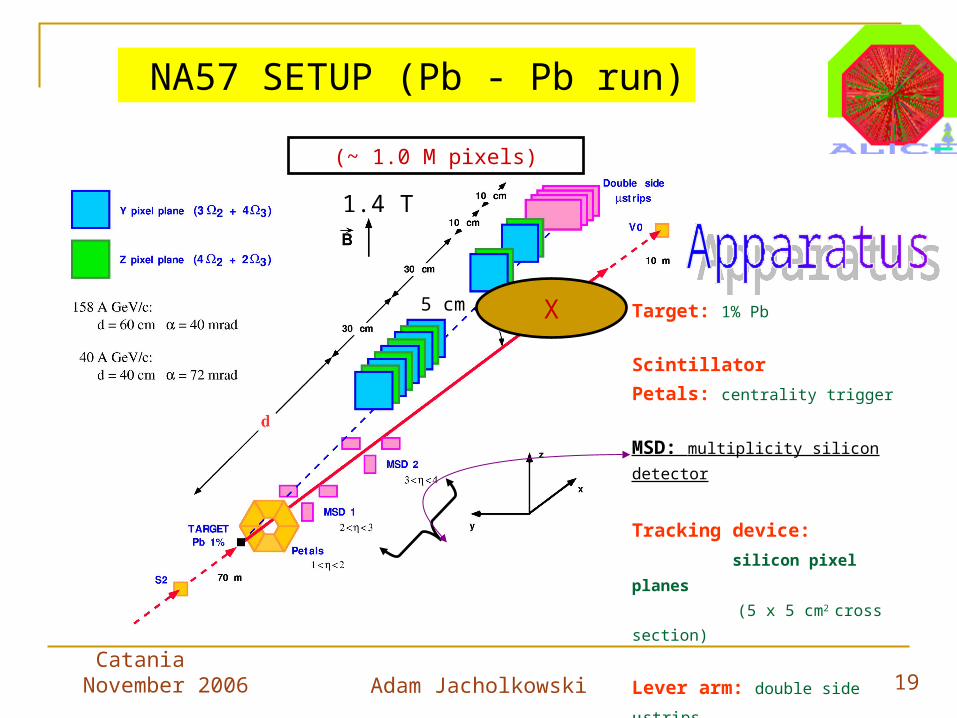
NA57 SETUP (Pb - Pb run)
1.4 T
Target: 1% Pb
Scintillator
Petals: centrality trigger
MSD: multiplicity silicon detector
Tracking device:
silicon pixel planes
(5 x 5 cm2 cross section)
Lever arm: double side strips
5 cm X
(~ 1.0 M pixels)
Catania November 2006 Adam Jacholkowski 20
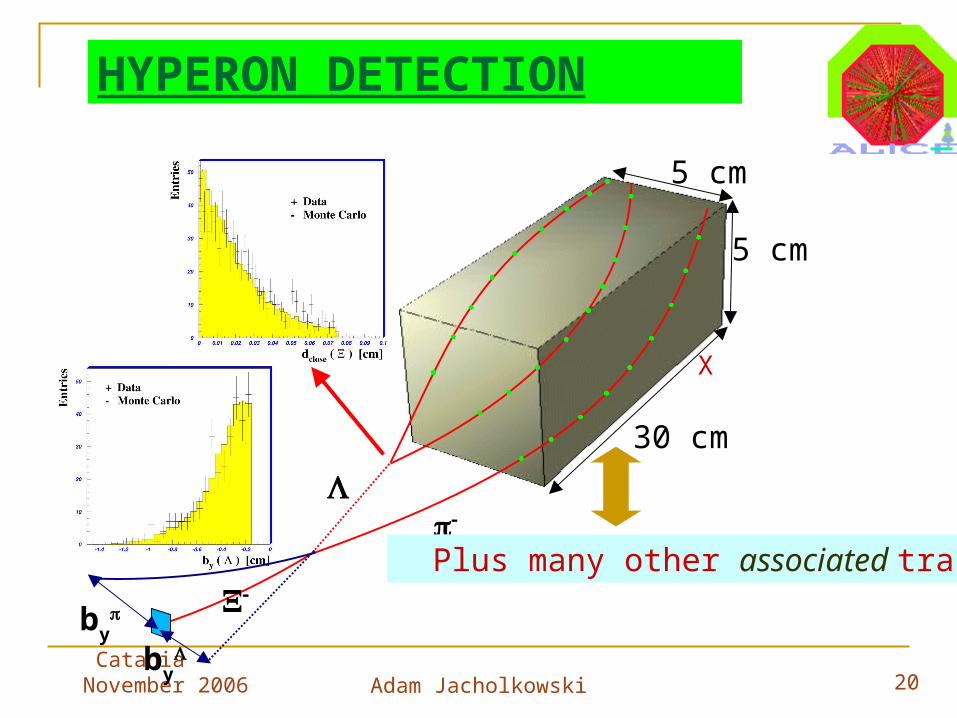
HYPERON DETECTION
30 cm
5 cm
5 cm
by
by
Plus many other associated tracks
X
Catania November 2006 Adam Jacholkowski 21
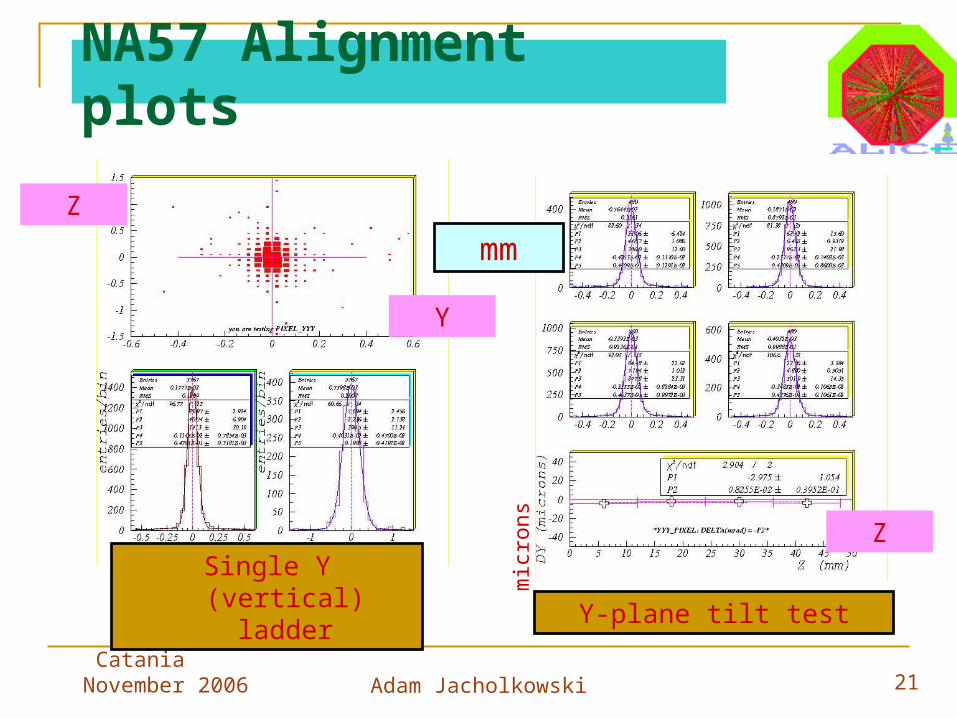
NA57 Alignment plots
Single Y (vertical) ladderY-plane tilt test
mm
Z
Z
Y
mic
rons
Catania November 2006 Adam Jacholkowski 22
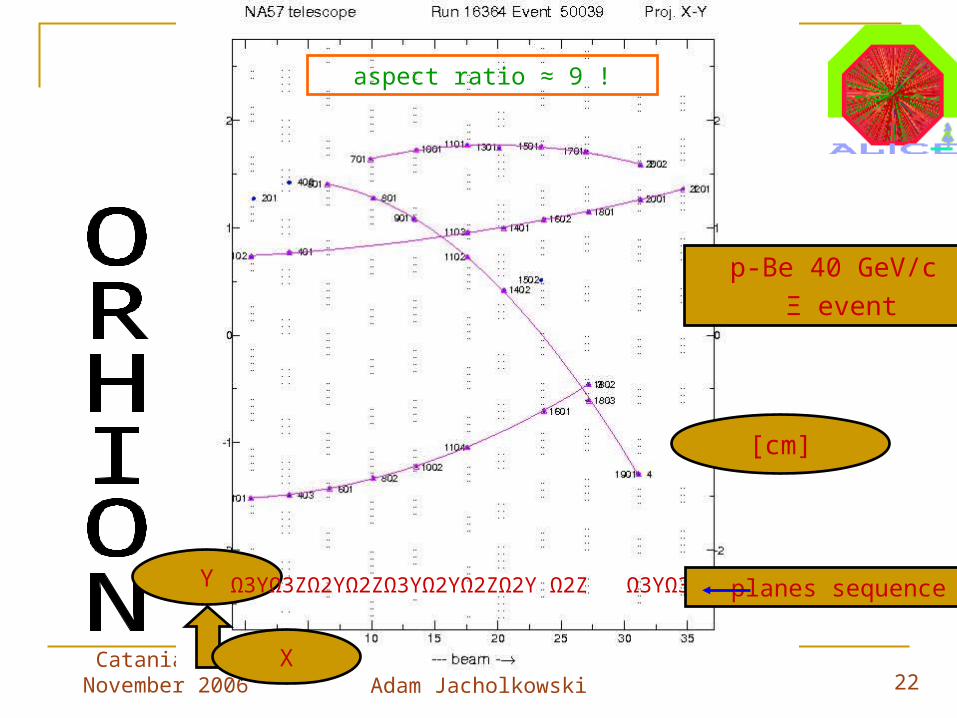
p-Be 40 GeV/c
Ξ event
[cm]
Y
X
Ω3YΩ3ZΩ2YΩ2ZΩ3YΩ2YΩ2ZΩ2Y Ω2Z Ω3YΩ3Y planes sequence
aspect ratio ≈ 9 !
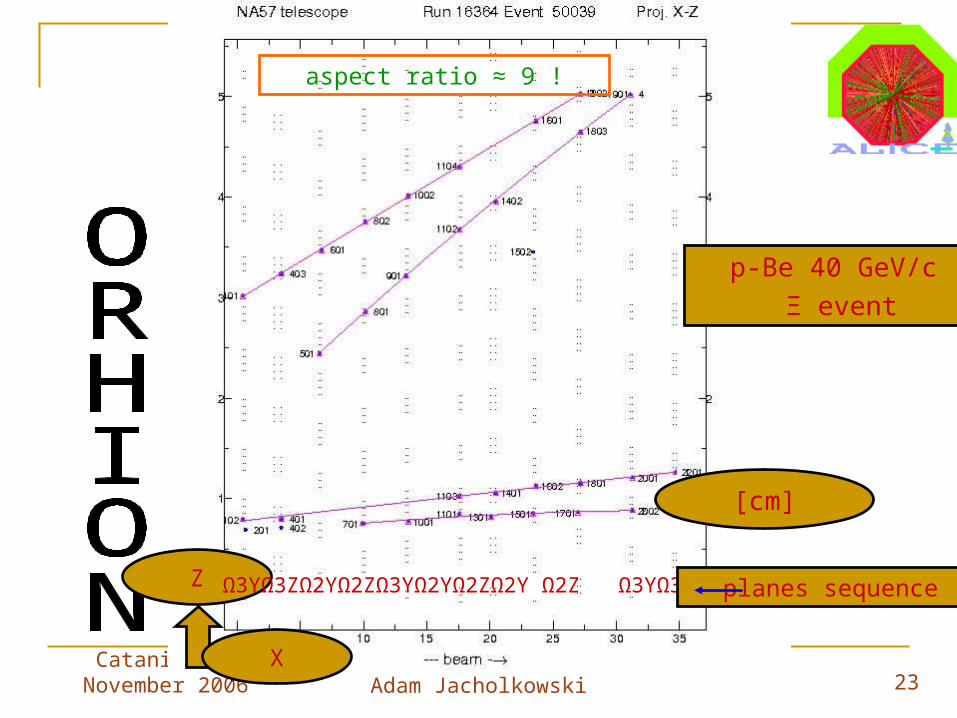
Catania November 2006 Adam Jacholkowski 23
p-Be 40 GeV/c
Ξ event
[cm]
Z
X
Ω3YΩ3ZΩ2YΩ2ZΩ3YΩ2YΩ2ZΩ2Y Ω2Z Ω3YΩ3Y planes sequence
aspect ratio ≈ 9 !
Catania November 2006 Adam Jacholkowski 24
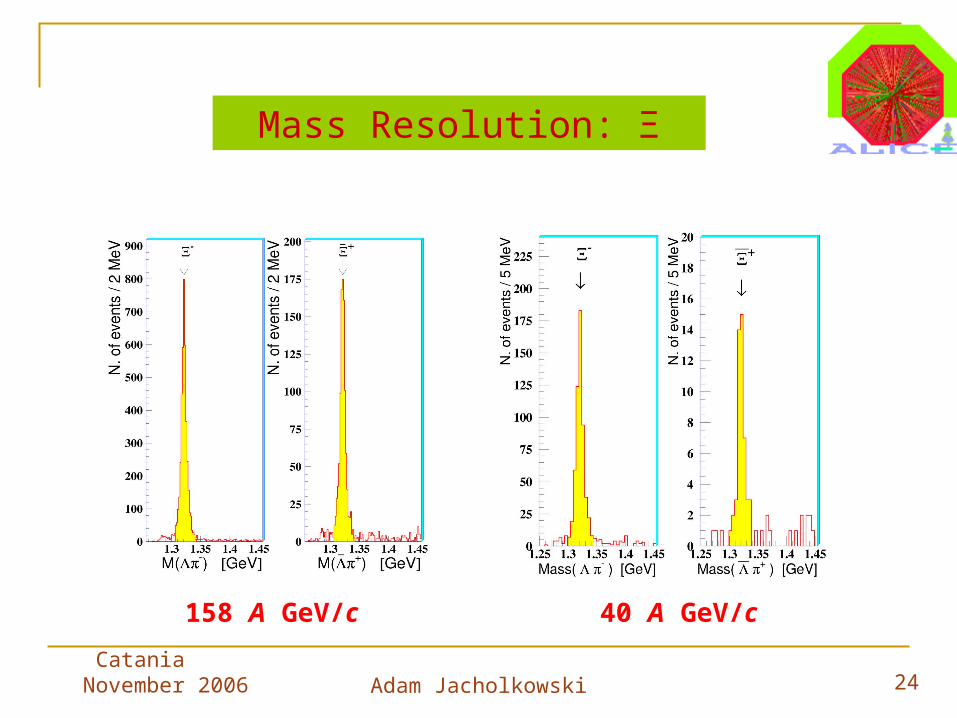
Mass Resolution: Ξ
158 A GeV/c 40 A GeV/c
Catania November 2006 Adam Jacholkowski 25
Global Alignment Approach
Limitations of the local method Correlations not (fully) taken into account Convergence not always guaranteed Constraints not easy to be included
Possible solution – simultaneous fit of ALL the parameters (tracks and sensors) problem of inverting huge matrices !
Millepede Algorithm developed in DESY by Volker Blobel (http://www.desy.de/~blobel)
Numerical limitations an attempt to overcome the problem Millepede II
Catania November 2006 Adam Jacholkowski 26
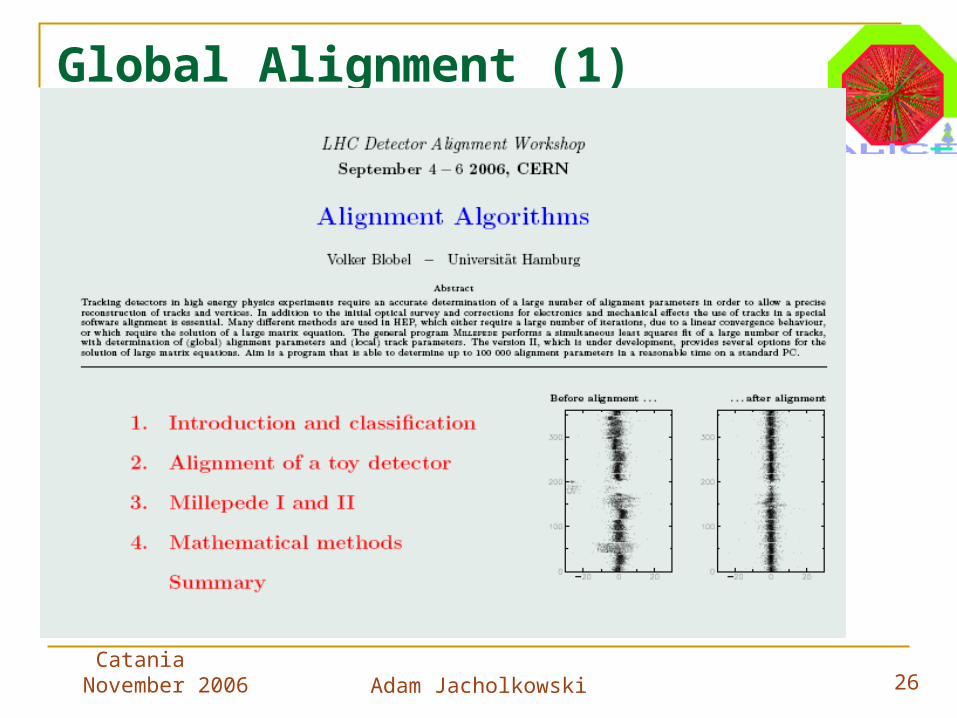
Global Alignment (1)
Catania November 2006 Adam Jacholkowski 27
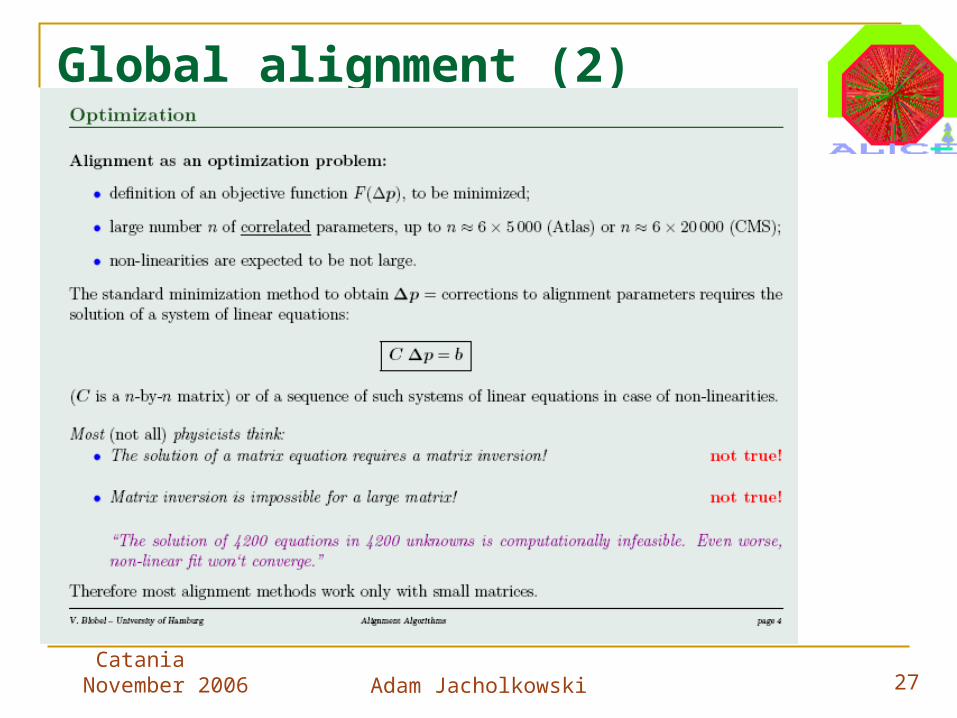
Global alignment (2)
Catania November 2006 Adam Jacholkowski 28
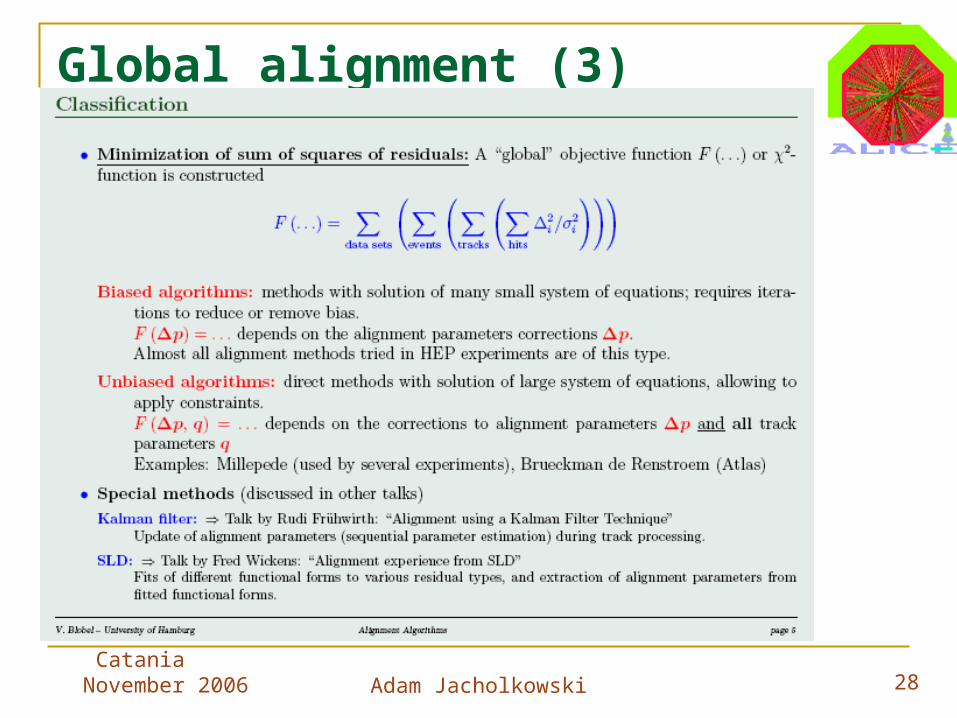
Global alignment (3)
Catania November 2006 Adam Jacholkowski 29
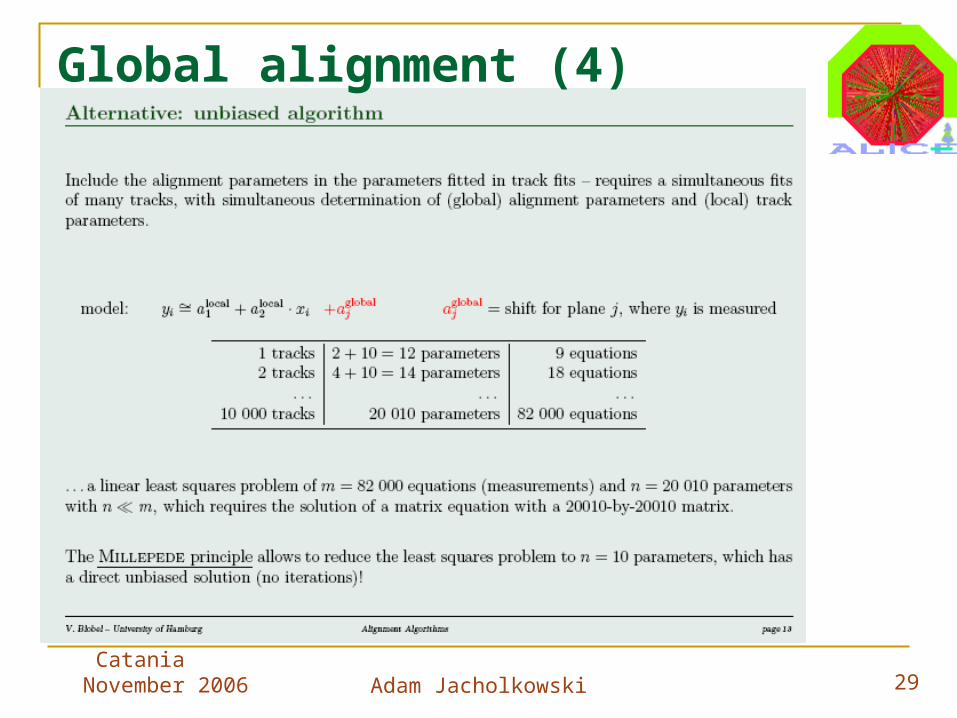
Global alignment (4)
Catania November 2006 Adam Jacholkowski 30
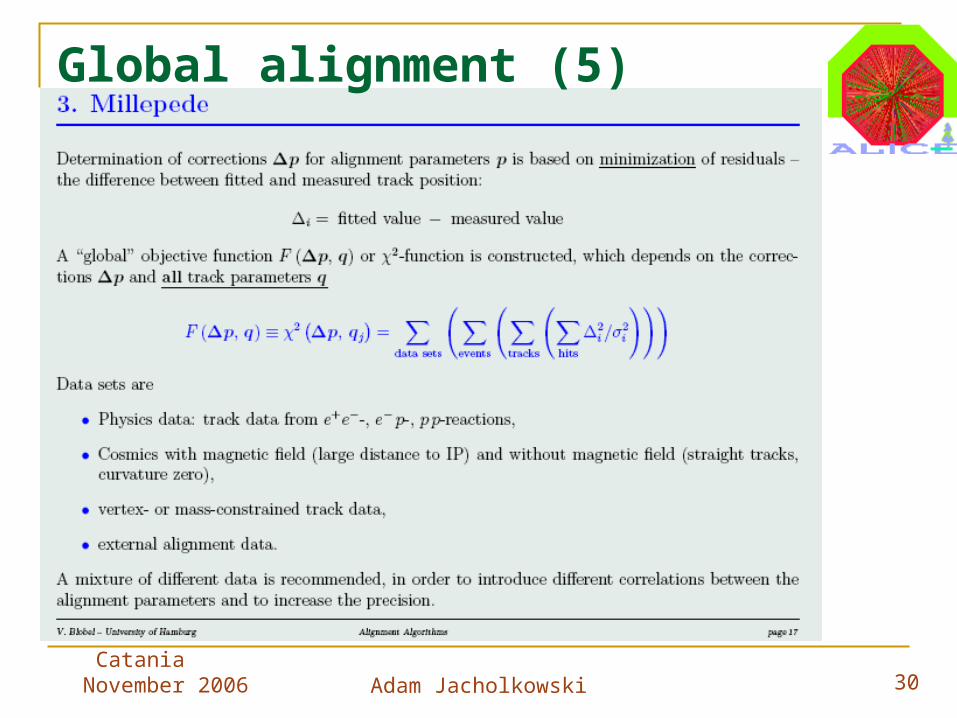
Global alignment (5)
Catania November 2006 Adam Jacholkowski 31
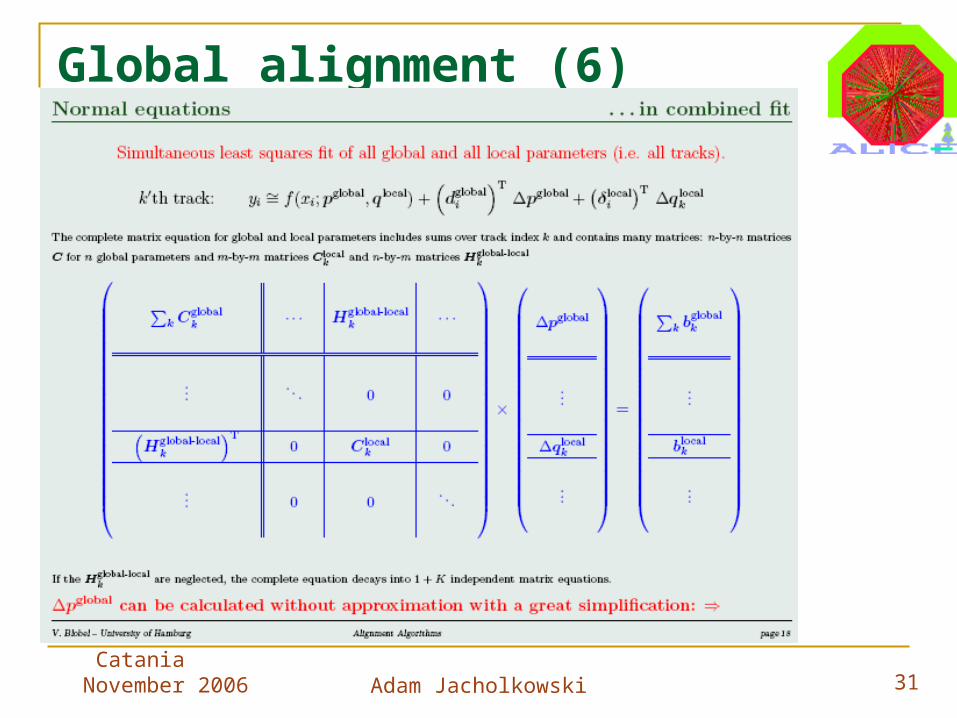
Global alignment (6)
Catania November 2006 Adam Jacholkowski 32
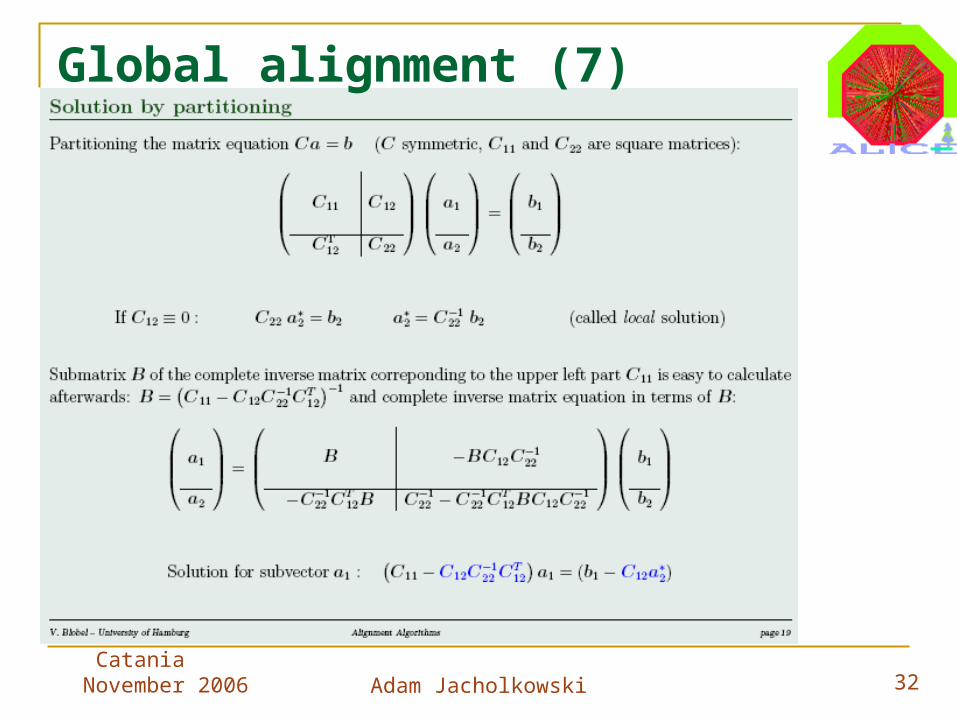
Global alignment (7)
Catania November 2006 Adam Jacholkowski 33
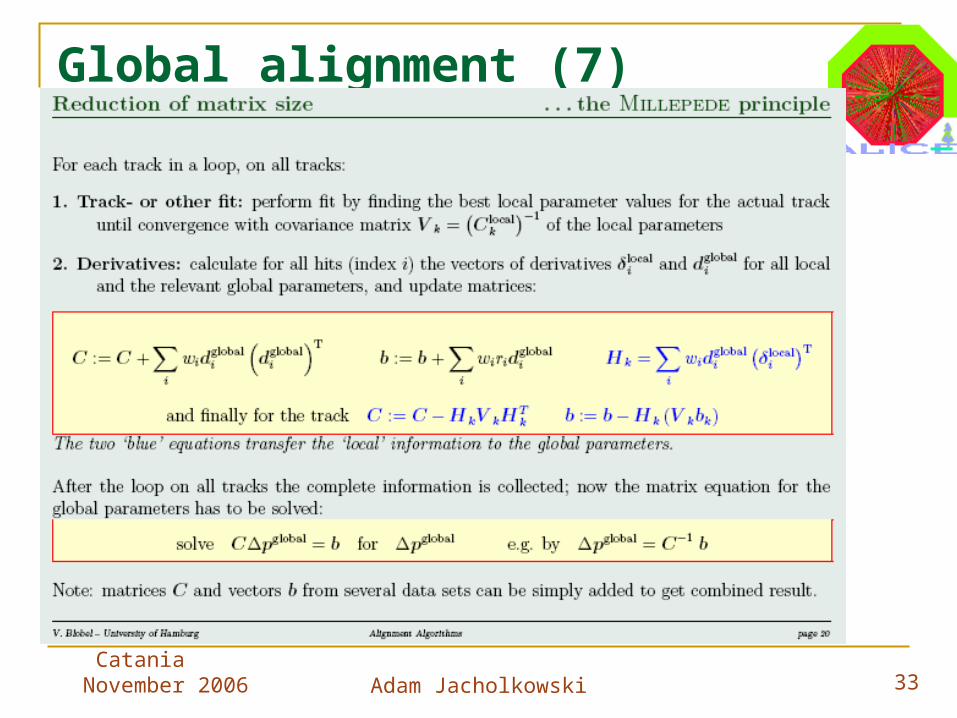
Global alignment (7)
Catania November 2006 Adam Jacholkowski 34
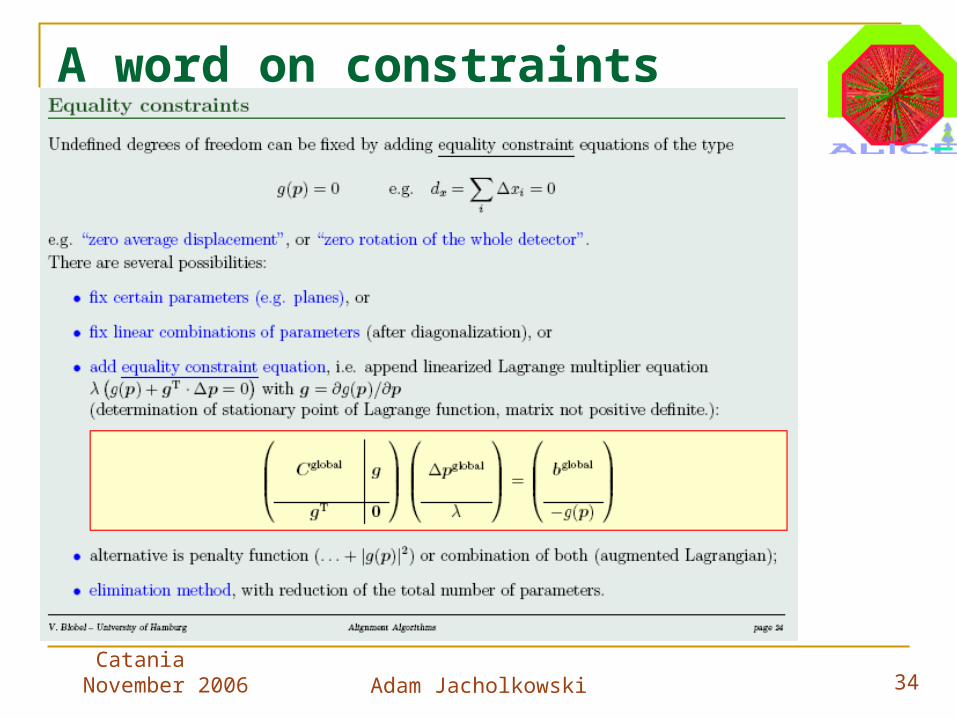
A word on constraints
Catania November 2006 Adam Jacholkowski 35
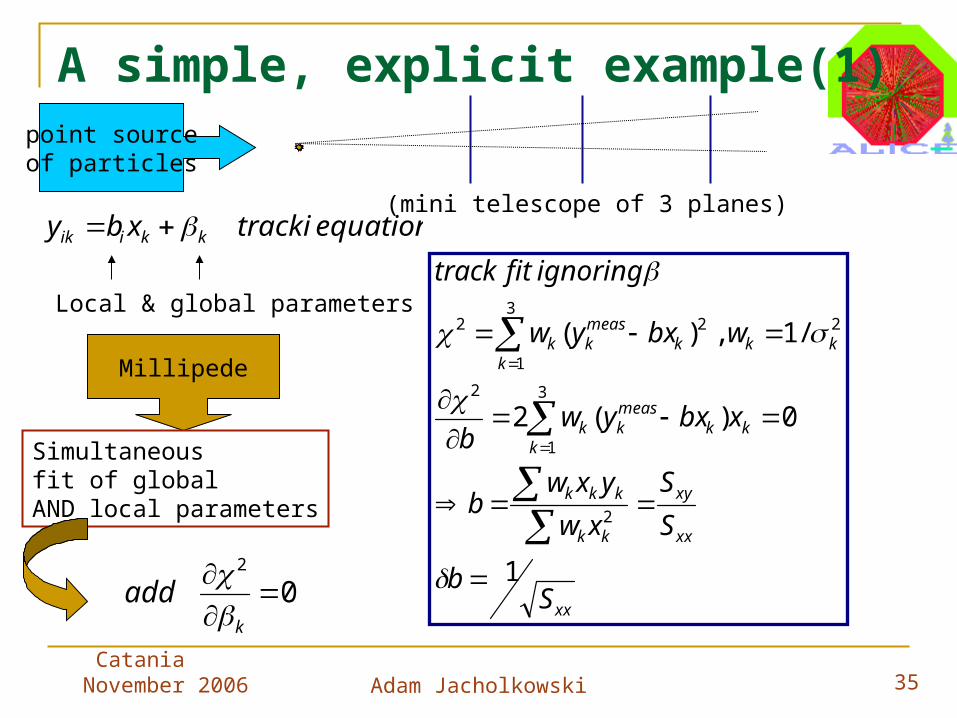
A simple, explicit example(1)
equationitrackxby kkiik
xx
xx
xy
kk
kkk
kkmeask
kk
kkkmeask
kk
Sb
S
S
xw
yxwb
xbxywb
wbxyw
ignoringfittrack
1
0)(2
/1,)(
2
3
1
2
223
1
2
(mini telescope of 3 planes)
point sourceof particles
Local & global parameters
Millipede
Simultaneousfit of globalAND local parameters
02
k
add
Catania November 2006 Adam Jacholkowski 36
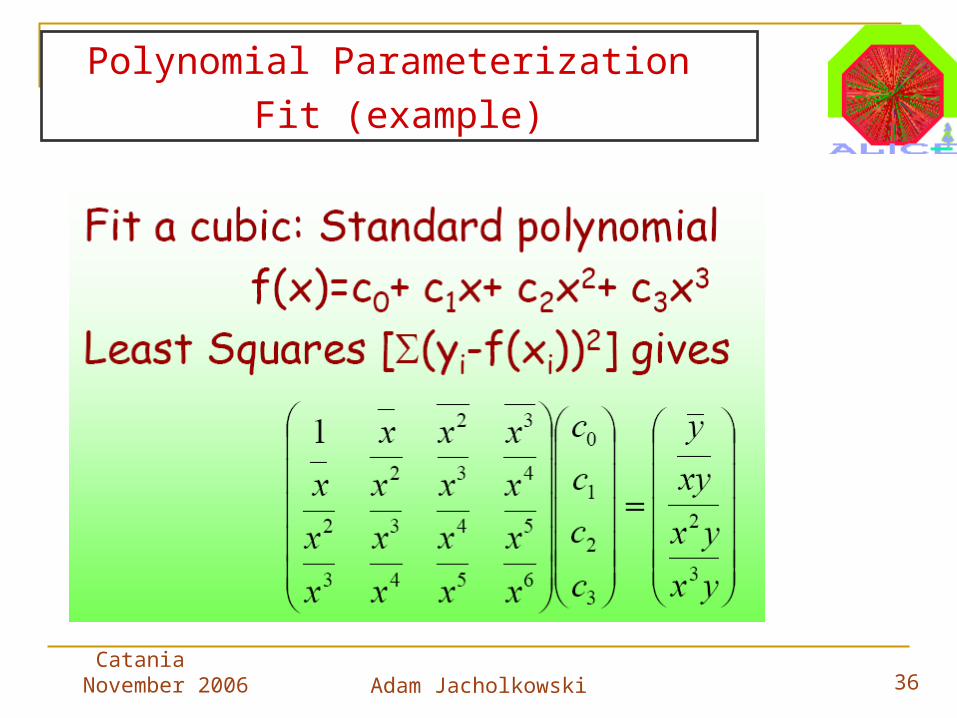
Polynomial Parameterization
Fit (example)
Catania November 2006 Adam Jacholkowski 37
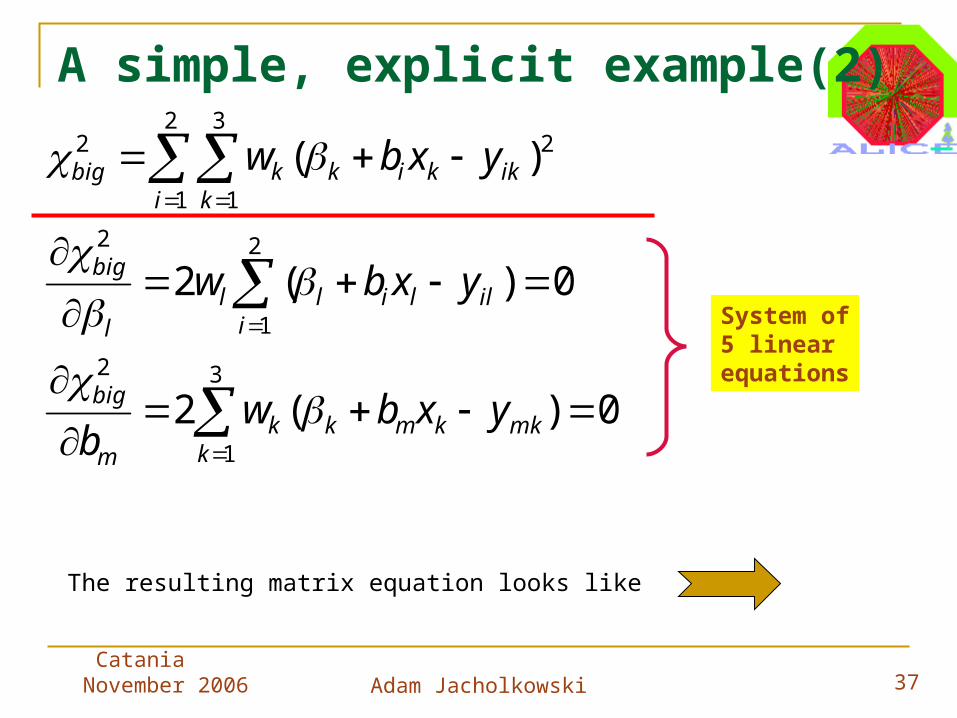
0)(2
0)(2
)(
3
1
2
2
1
2
22
1
3
1
2
mkkmkk
km
big
illili
ll
big
iki k
kikkbig
yxbwb
yxbw
yxbw
A simple, explicit example(2)
System of5 linear equations
The resulting matrix equation looks like
Catania November 2006 Adam Jacholkowski 38
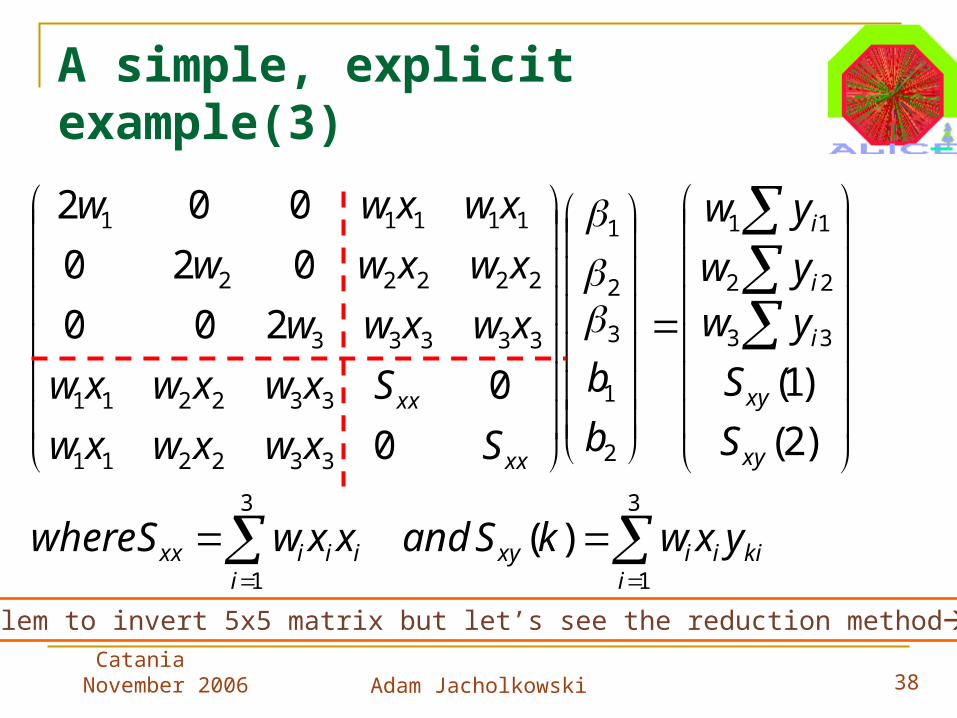
A simple, explicit example(3)
kiii
ixyiii
ixx
xy
xy
i
i
i
xx
xx
yxwkSandxxwSwhere
S
S
yw
yw
yw
b
b
Sxwxwxw
Sxwxwxw
xwxww
xwxww
xwxww
3
1
3
1
33
22
11
2
1
3
2
1
332211
332211
33333
22222
11111
)(
)2(
)1(
0
0
200
020
002
No problem to invert 5x5 matrix but let’s see the reduction method 3x3
Catania November 2006 Adam Jacholkowski 39
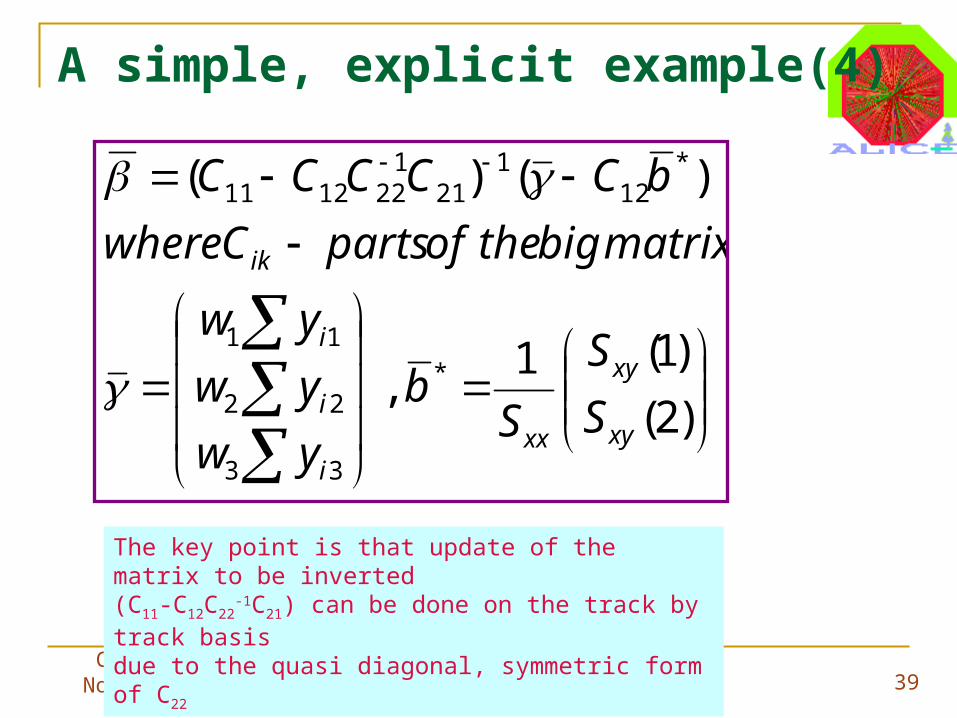
A simple, explicit example(4)
)2(
)1(1,
)()(
*
33
22
11
*12
121
1221211
xy
xy
xxi
i
i
ik
S
S
Sb
yw
yw
yw
matrixbigtheofpartsCwhere
bCCCCC
The key point is that update of the matrix to be inverted(C11-C12C22
-1C21) can be done on the track by track basisdue to the quasi diagonal, symmetric form of C22
Catania November 2006 Adam Jacholkowski 40
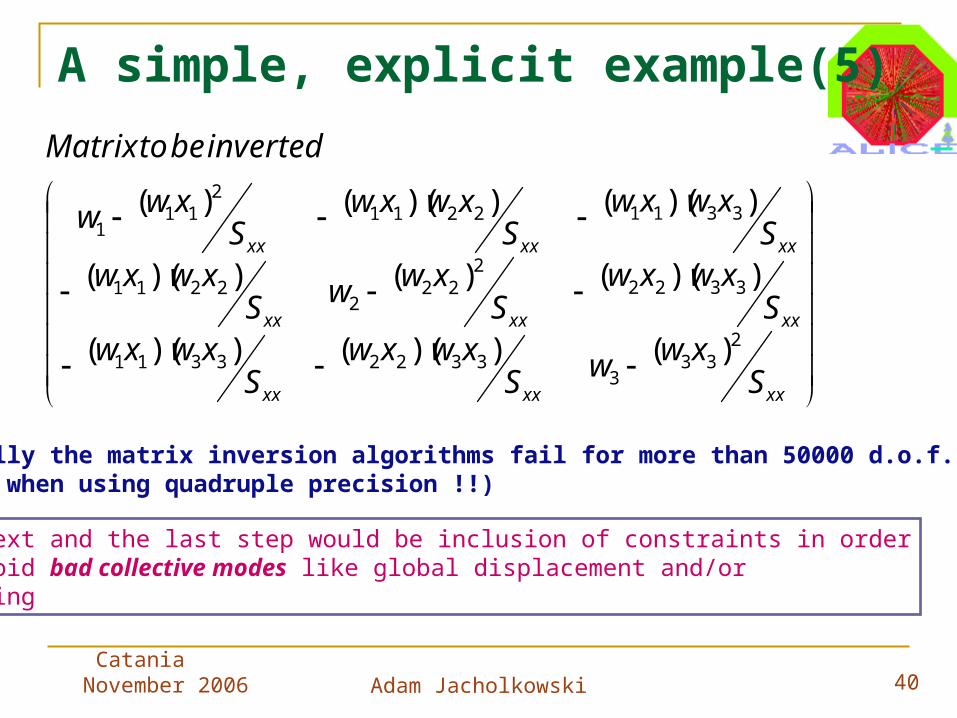
A simple, explicit example(5)
xxxxxx
xxxxxx
xxxxxx
SxwwS
xwxwS
xwxwS
xwxwS
xwwSxwxw
Sxwxw
Sxwxw
Sxww
invertedbetoMatrix
233
333223311
33222
222
2211
331122112
111
)())(())((
))(()())((
))(())(()(
Actually the matrix inversion algorithms fail for more than 50000 d.o.f.(even when using quadruple precision !!)
The next and the last step would be inclusion of constraints in orderto avoid bad collective modes like global displacement and/orshearing
Catania November 2006 Adam Jacholkowski 41
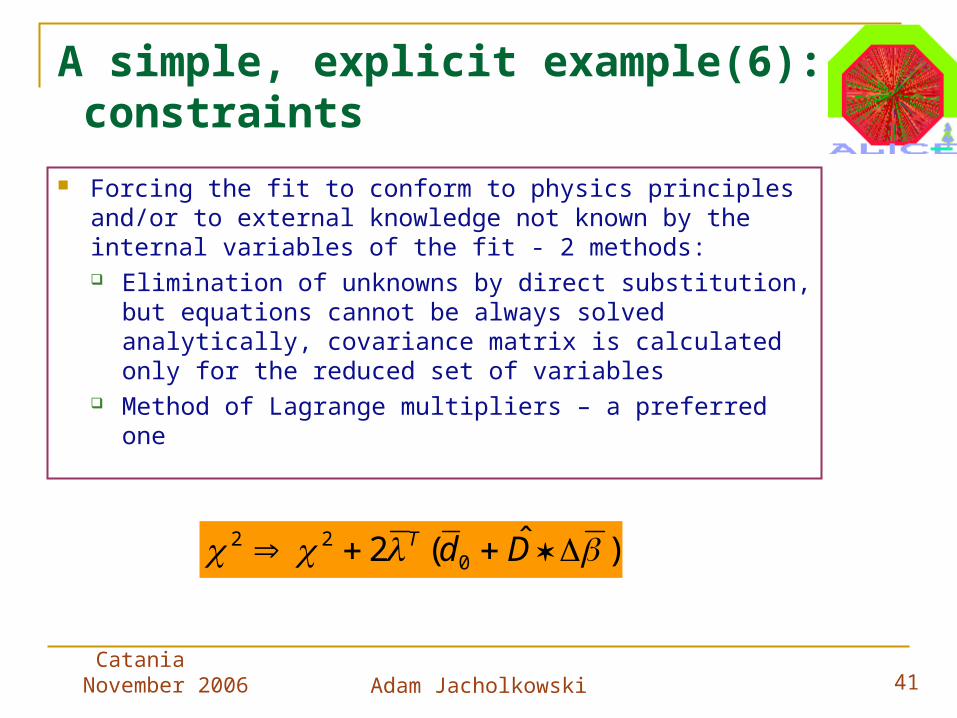
A simple, explicit example(6): constraints
Forcing the fit to conform to physics principles and/or to external knowledge not known by the internal variables of the fit - 2 methods: Elimination of unknowns by direct substitution, but
equations cannot be always solved analytically, covariance matrix is calculated only for the reduced set of variables
Method of Lagrange multipliers – a preferred one
)ˆ(2 022 DdT
Catania November 2006 Adam Jacholkowski 42
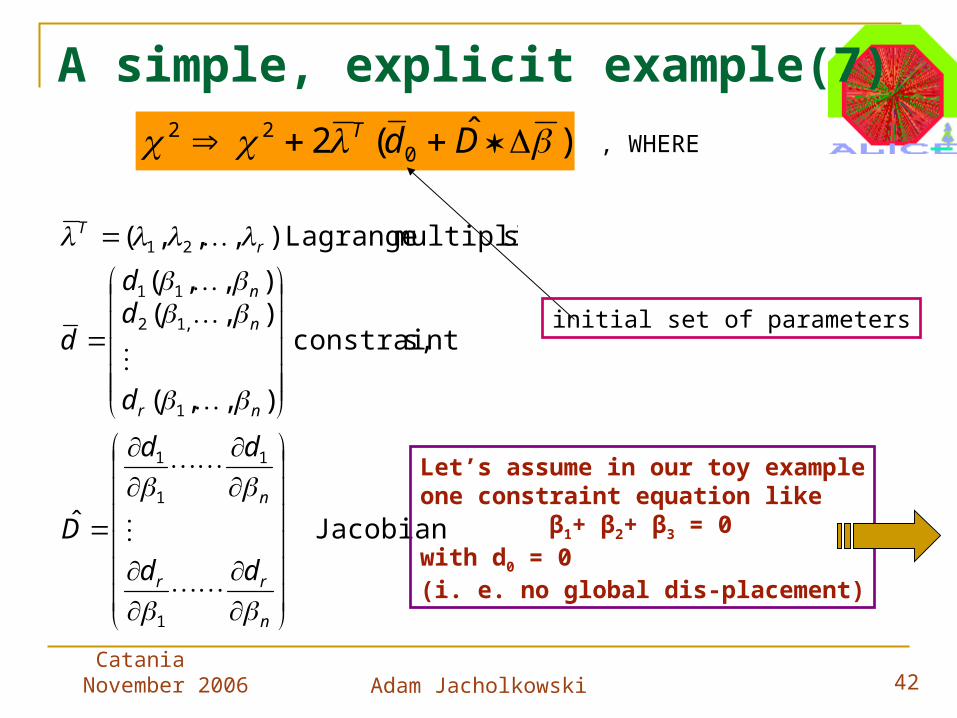
A simple, explicit example(7)
)ˆ(2 022 DdT
, WHERE
Jacobianˆ
s,constraint
),,(
),(),,(
smultiplier Lagrange),,,(
1
1
1
1
1
,12
11
21
n
rr
n
nr
n
n
rT
dd
dd
D
d
dd
d
initial set of parameters
Let’s assume in our toy exampleone constraint equation like β1+ β2+ β3 = 0 with d0 = 0(i. e. no global dis-placement)
Catania November 2006 Adam Jacholkowski 43
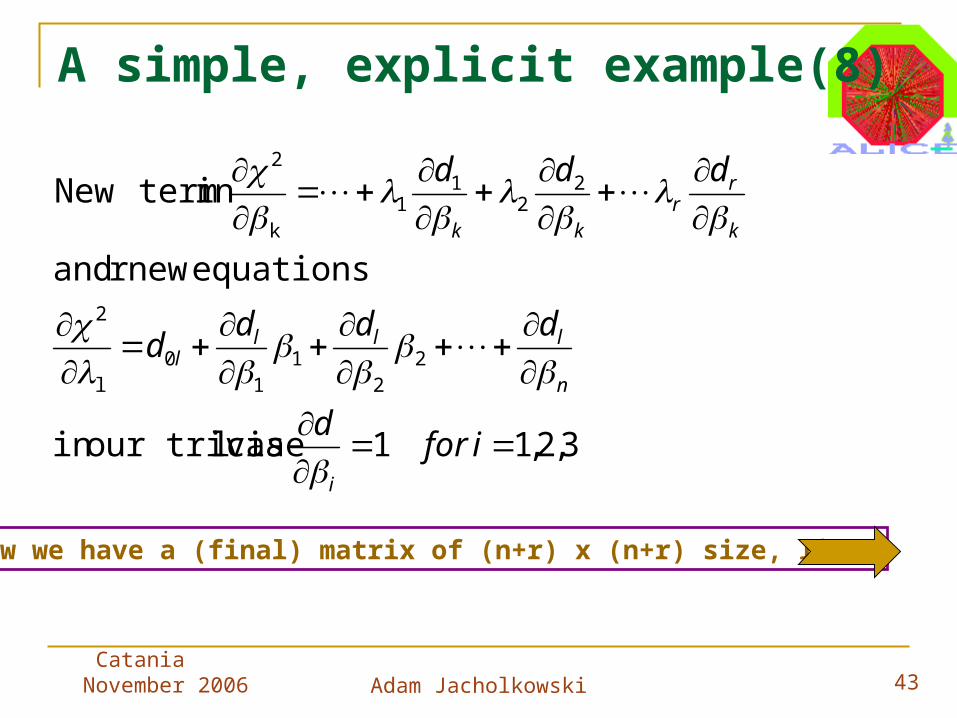
A simple, explicit example(8)
3,2,11 case lour triviain
equations newr and
in termNew
22
11
0l
2
22
11
k
2
iford
dddd
ddd
i
n
llll
k
rr
kk
Now we have a (final) matrix of (n+r) x (n+r) size, like
Catania November 2006 Adam Jacholkowski 44
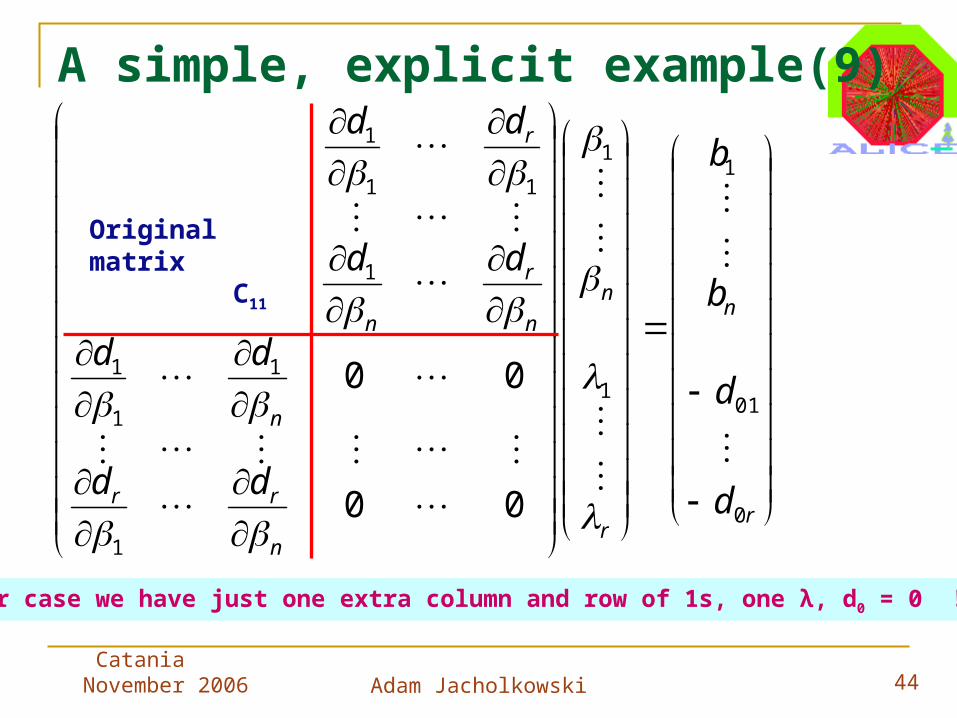
A simple, explicit example(9)
r
n
r
n
n
rr
n
n
r
n
r
d
d
b
b
dd
dd
dd
dd
0
01
1
1
1
1
1
1
1
1
11
1
00
00
Original matrix C11
In our case we have just one extra column and row of 1s, one λ, d0 = 0 !!
Catania November 2006 Adam Jacholkowski 45
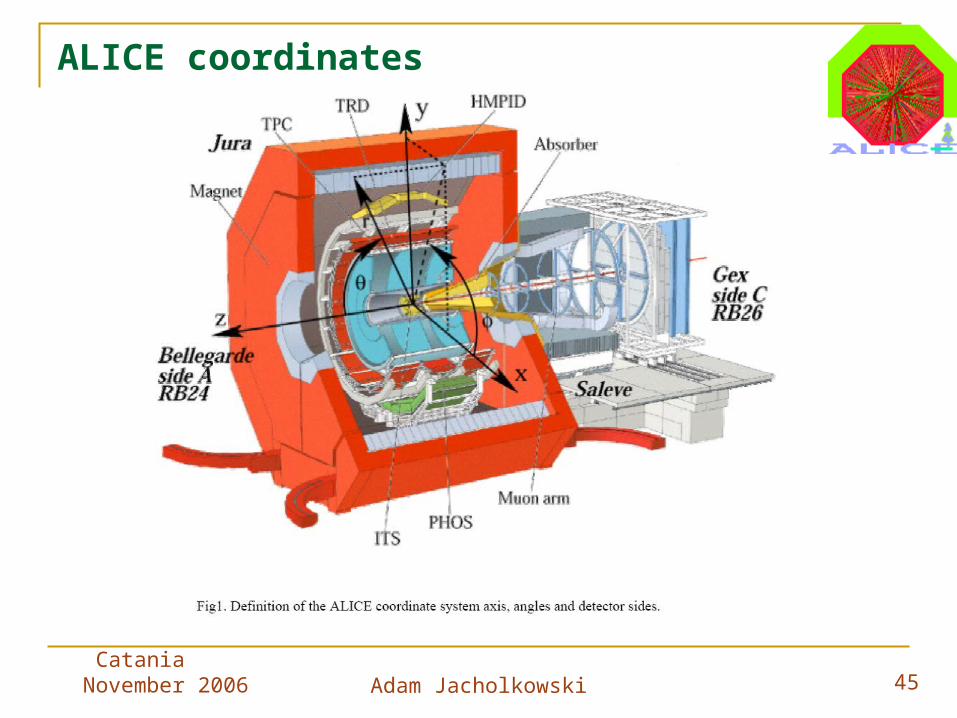
ALICE coordinates
Catania November 2006 Adam Jacholkowski 46
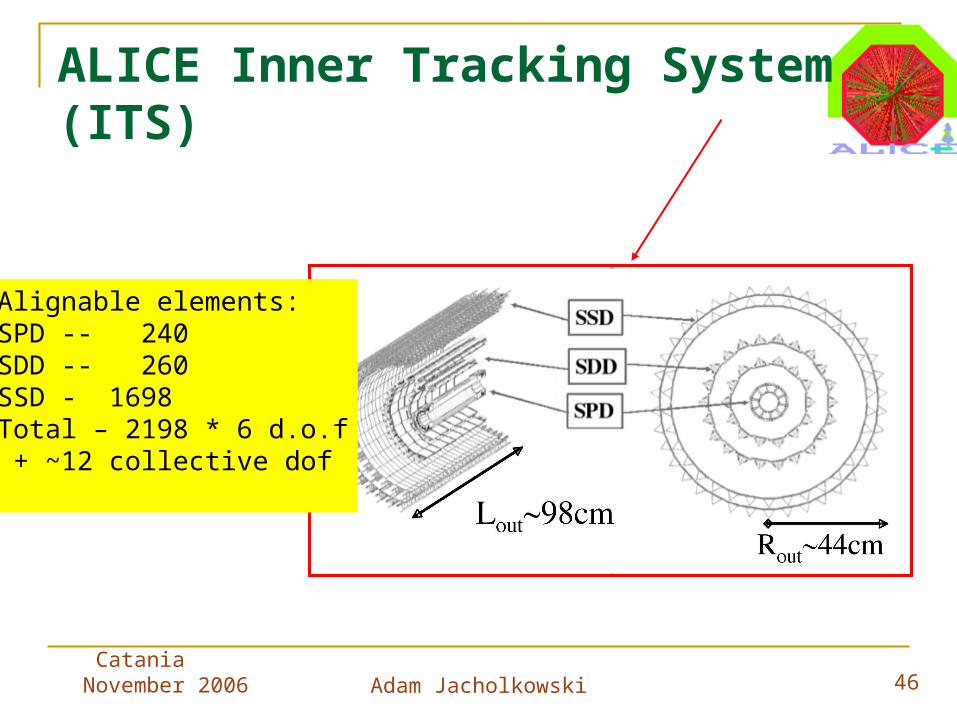
ALICE Inner Tracking System (ITS)
Alignable elements:SPD -- 240SDD -- 260SSD - 1698Total – 2198 * 6 d.o.f + ~12 collective dof
Catania November 2006 Adam Jacholkowski 47
SUMMARY
All modern particle detectors need software (track) alignment methods in order to reach the design precision
Two main approaches: Local with many iterations Global needing inversion of huge matrices
We have looked into MATH involved in these 2 methods, discussed some approximations and tricks
Computing and bookkeeping very challenging in real life, especially in the LHC experiments under preparation
Alignment is part of the art of detector calibration (MATH is not ALL)
48
COSMICS as a tool in the detector pre-alignment in ALICE
Before the (true) beam becomes available…
Catania November 2006 Adam Jacholkowski 49
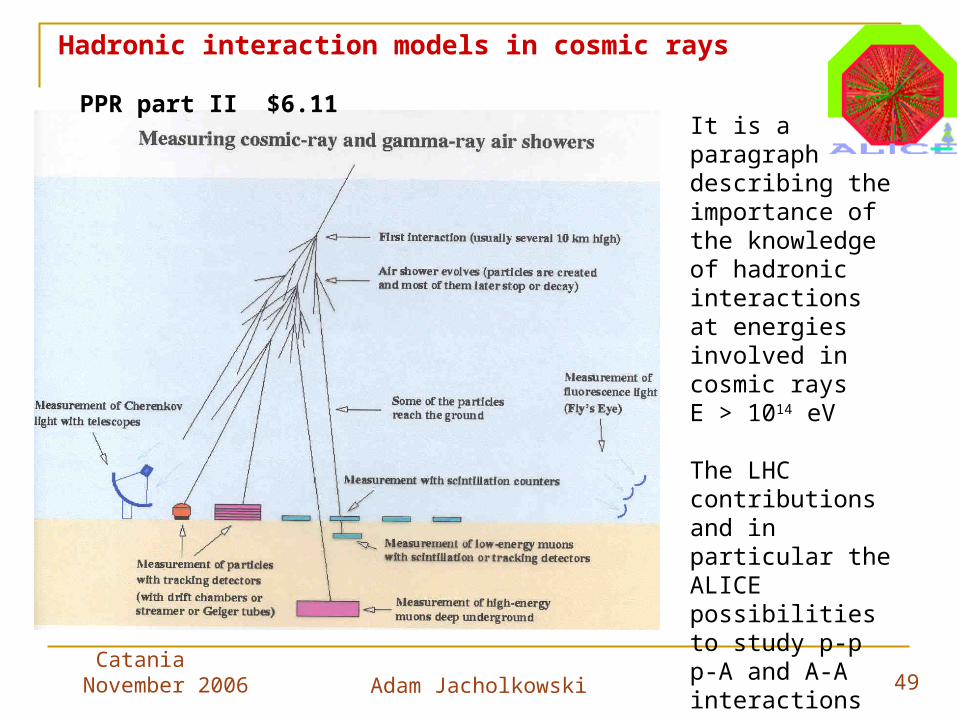
Hadronic interaction models in cosmic rays
It is a paragraph describing the importance of the knowledge of hadronic interactions at energies involved in cosmic rays E > 1014 eV
The LHC contributions and in particular the ALICE possibilities to study p-p p-A and A-A interactions
PPR part II $6.11

Catania November 2006 Adam Jacholkowski 50
Location of ALICE set-up
Element H C O Na Mg Al Si K Ca Fe
% 0.8 4.3 48.5 0.7 4.2 3.7 21.5 2.3 10.0 4.0
Rock composition over Alice
Effects on muons of the Alice environment
• N15 GeV)
• Direction
• Energy
Catania November 2006 Adam Jacholkowski 51
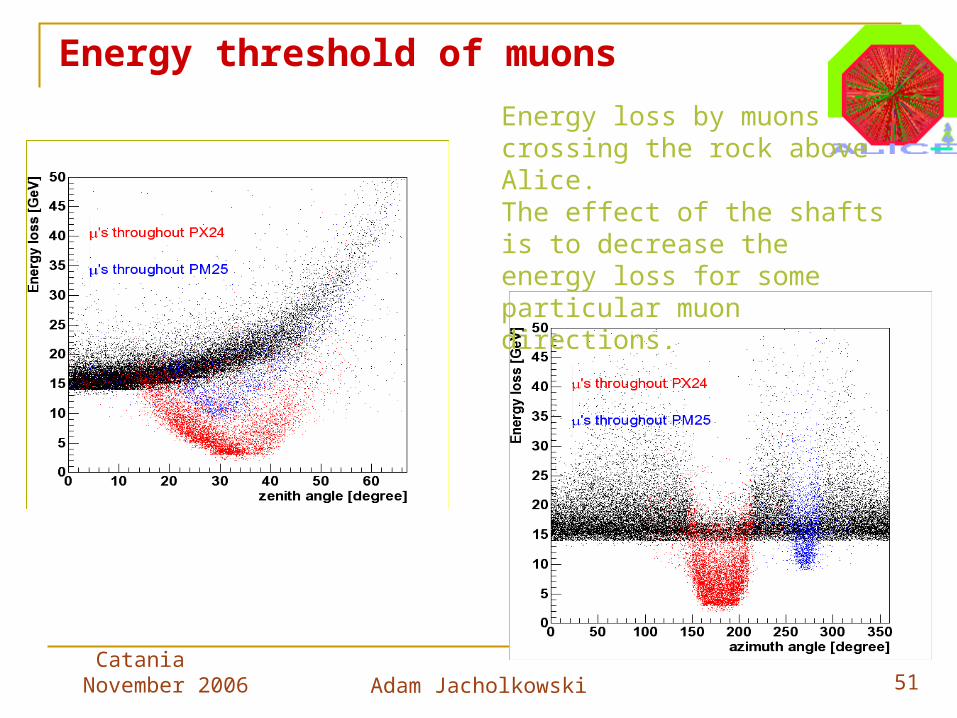
Energy threshold of muons
Energy loss by muons crossing the rock above Alice.The effect of the shafts is to decrease the energy loss for some particular muon directions.
Catania November 2006 Adam Jacholkowski 52
Utility of cosmics for alignment When B=0, equivalent to the laser beams When B≠0, equivalent to two tracks going back
to back with equal momentum (a la Z0 decay) strong constraints
Given for free ! But some weak points:
Momentum not known Limited zenithal angle range (up to 60 deg.) Limited flux
Used for alignment by most of the experiments
Catania November 2006 Adam Jacholkowski 53
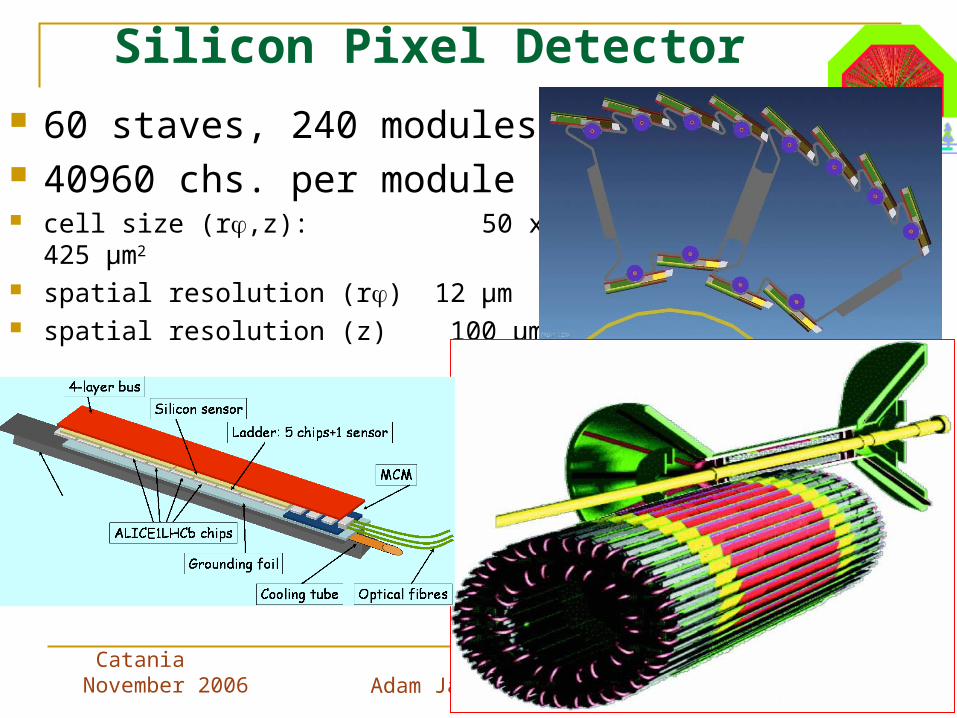
Silicon Pixel Detector 60 staves, 240 modules 40960 chs. per module cell size (r,z): 50 x 425 µm2
spatial resolution (r) 12 µm spatial resolution (z) 100 µm
Catania November 2006 Adam Jacholkowski 54
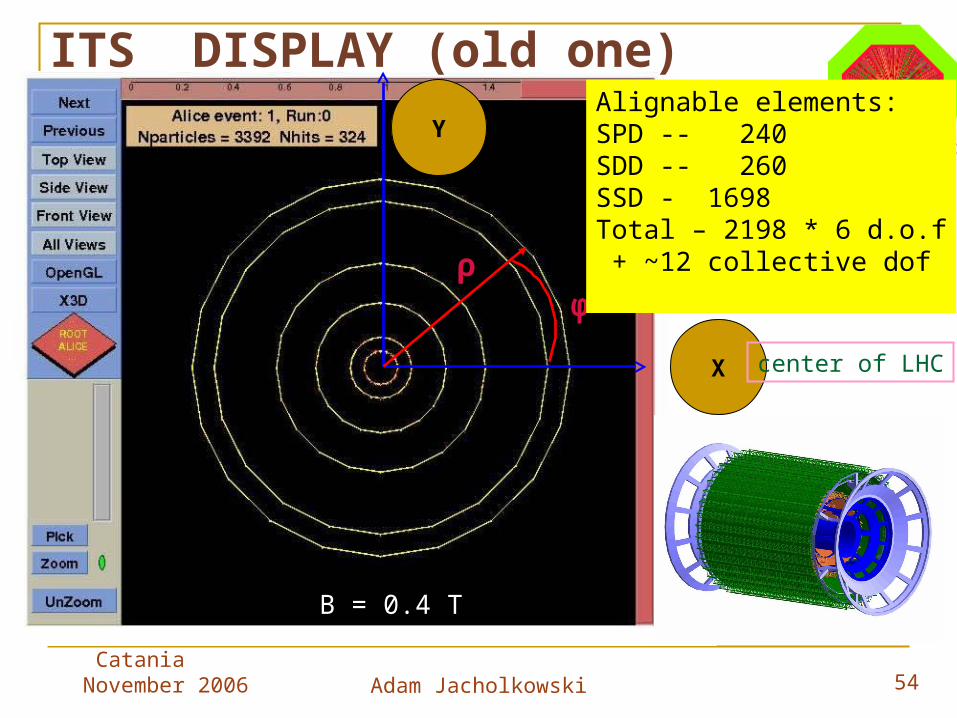
B = 0.4 T
ITS DISPLAY (old one)
X
Y
ρφ
center of LHC
Alignable elements:SPD -- 240SDD -- 260SSD - 1698Total – 2198 * 6 d.o.f + ~12 collective dof
Catania November 2006 Adam Jacholkowski 55
Catania November 2006 Adam Jacholkowski 56
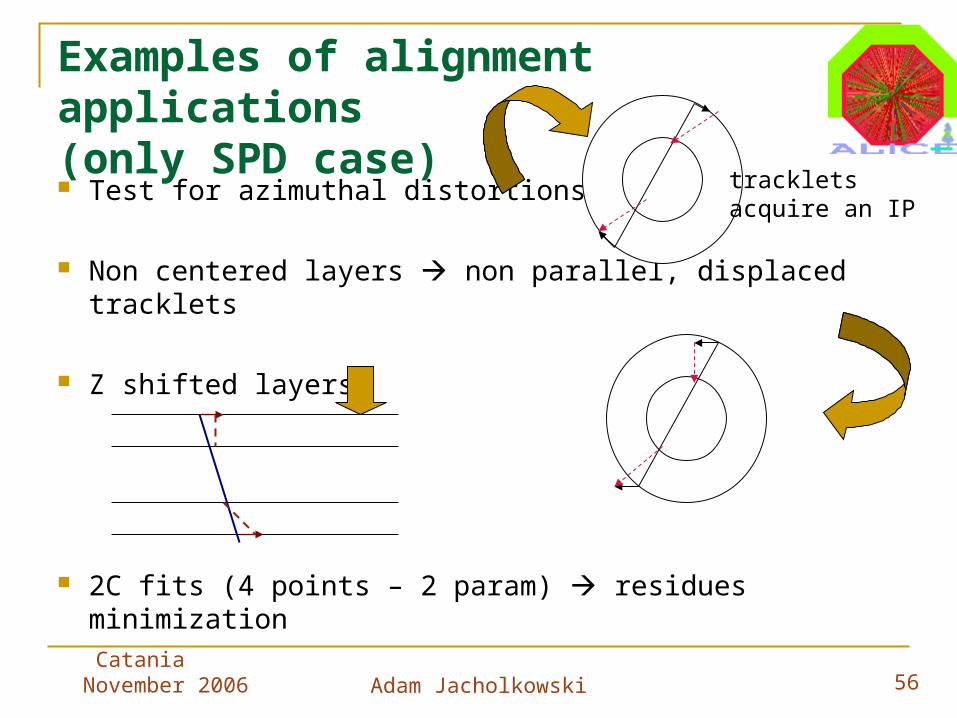
Examples of alignment applications(only SPD case) Test for azimuthal distortions
Non centered layers non parallel, displaced tracklets
Z shifted layers
2C fits (4 points – 2 param) residues minimization
trackletsacquire an IP
Catania November 2006 Adam Jacholkowski 57
CRT muon simulation
Muon generation according to Hebbeker et al Config.C with AliGenCRT as generator Activated only ITS, CRT and some passive
materials Several “bad features”
CRT package not updated since 2 years, no documentation Multi muon (close) hits in the sensors (4-5/sensor) Resulting (abnormally) large clusters Generation at surface - propagation through the rock
above ALICE (no use of L3 measurements) No absolute normalization – not usable for flux estimate
First test simulation (low statistics) done
Catania November 2006 Adam Jacholkowski 58
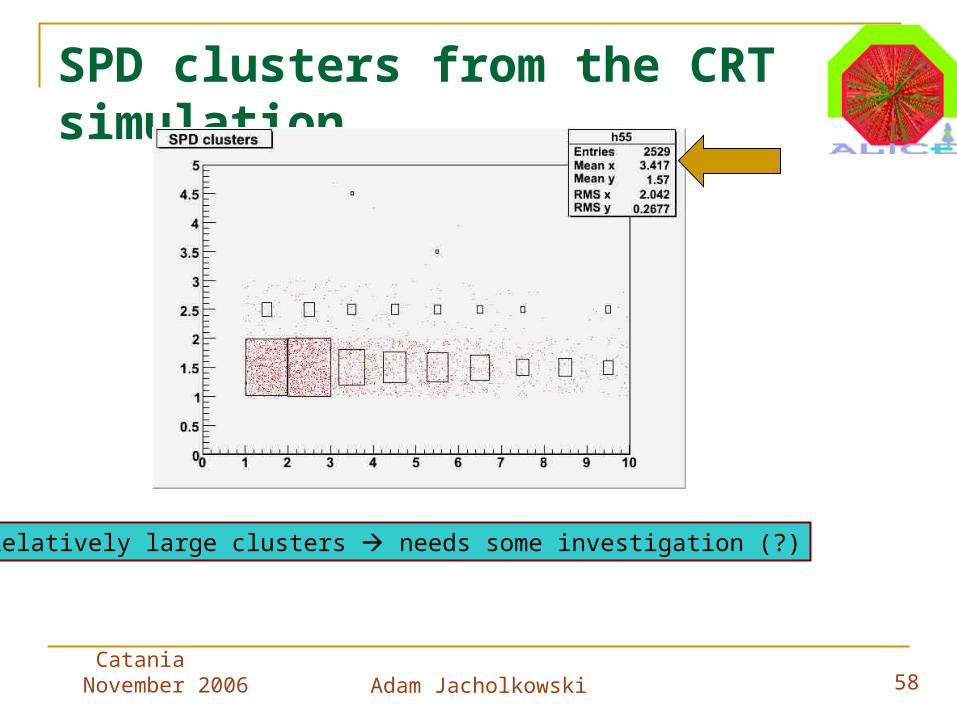
SPD clusters from the CRT simulation
Relatively large clusters needs some investigation (?)
Catania November 2006 Adam Jacholkowski 59
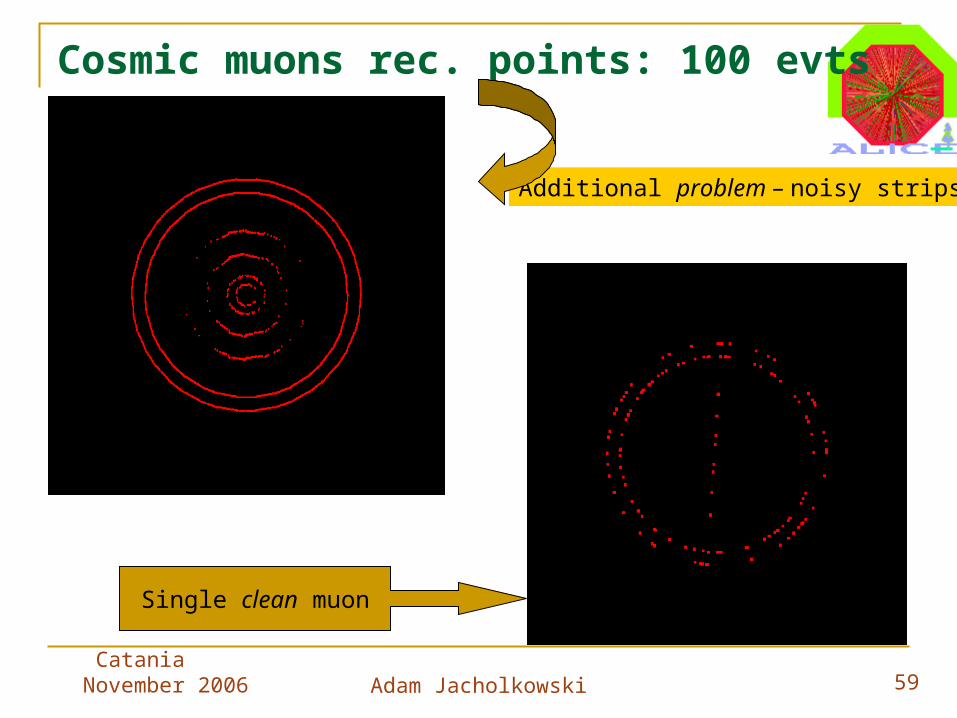
Cosmic muons rec. points: 100 evts
Additional problem – noisy strips
Single clean muon
Catania November 2006 Adam Jacholkowski 60
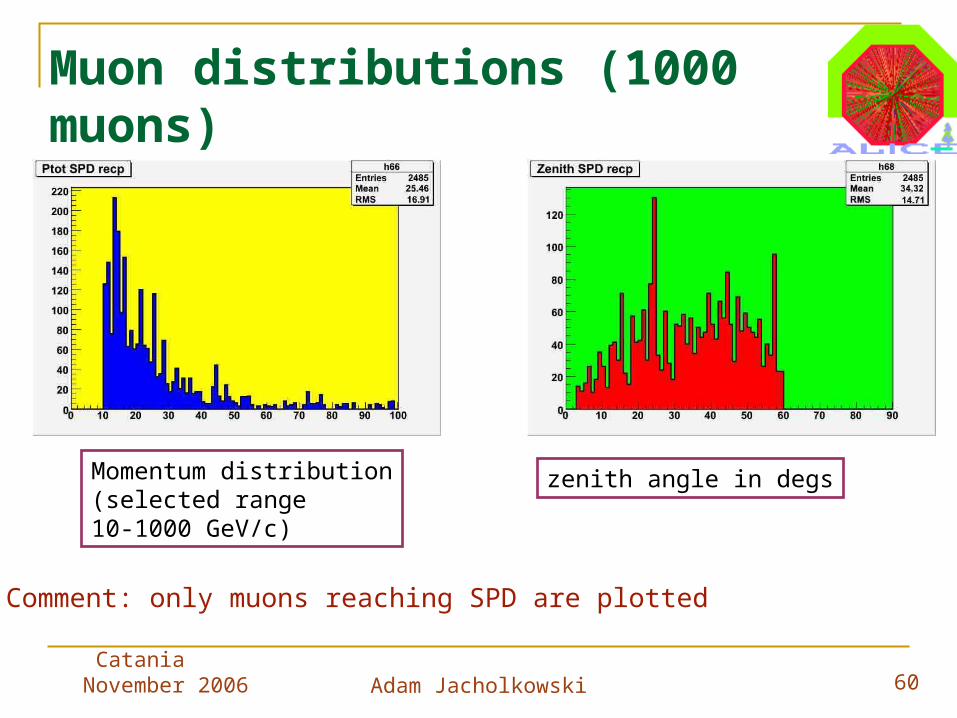
Muon distributions (1000 muons)
Momentum distribution(selected range 10-1000 GeV/c)
zenith angle in degs
Comment: only muons reaching SPD are plotted
Catania November 2006 Adam Jacholkowski 61
What should we get from thesimulation
Reference plots for all tracklets consistency checks Relative IPs in all projections Angular differences (XY and YZ/XZ projections) Same for different alignment levels
Study of the FAST-OR trigger efficiency Select events with a muon crossing SPD1,2 Apply trigger algorithm efficiency
Time estimate to accumulate useful samples of data (only 1-2 muons per minute in SPD !)
Preparing and testing simple (re)alignment tools
Catania November 2006 Adam Jacholkowski 62
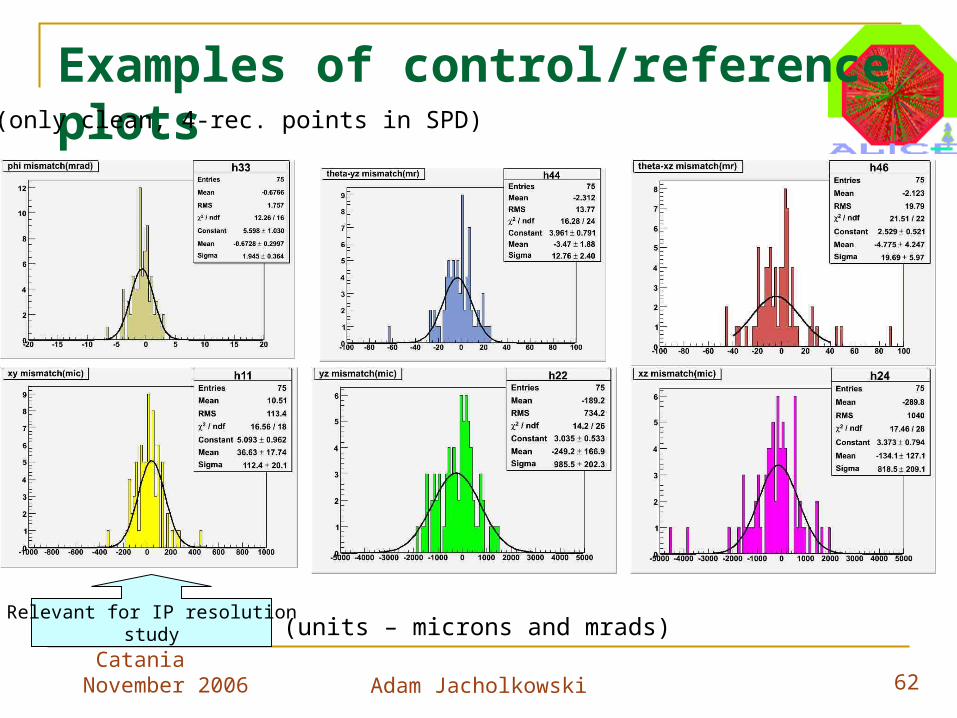
Examples of control/reference plots
(units – microns and mrads)
(only clean, 4-rec. points in SPD)
Relevant for IP resolutionstudy
Catania November 2006 Adam Jacholkowski 63
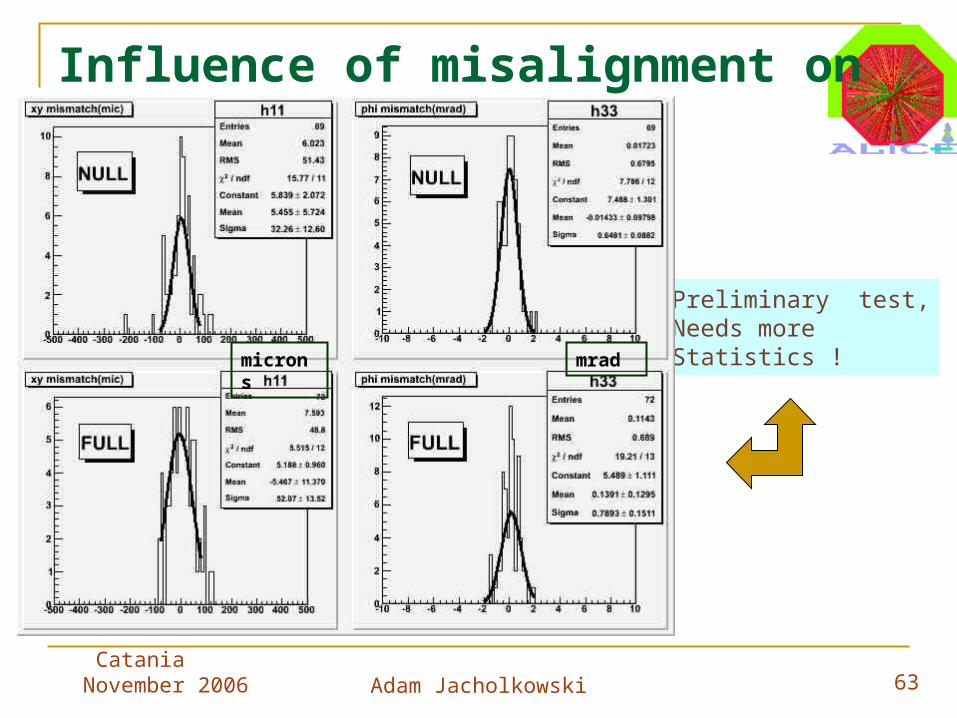
Influence of misalignment on IP/test
Preliminary test,Needs more Statistics !mradmicrons
Catania November 2006 Adam Jacholkowski 64
General ITS alignment strategy Three categories of the alignment procedures
Local , iterative sensor alignment (tracks based) based on the residues (many small, 6X6 matrices inversions (framework exists – Cvetan Cheshkov)
Global approach like Millepede of Volker Blobel inversion of huge matrices (12200X12200 in case of the ITS), used by the MUON (AliMillepede - Javier Castillo)
Poor physicist’s method – propagating alignment from small sub-detectors to bigger – outside detectors ( in our case from pixels outside)
Catania November 2006 Adam Jacholkowski 65
‘How I Would Align an LHC Detector’ Assemble a complementary set of events
Muons, pairs, cosmics, survey, … Align the innermost (most sensitive) detector first
Align internal DOFs with complimentary data Rigid body parameters plus non-planar distortions Use sanitized outer-tracking constraint (on curvature, …)
Align the next detector outwards next Include (aligned) innermost detector in track fit Align using standard techniques
Track self-consistency, survey, … Continue outwards
Include calorimeter, muon chambers Repeat (if necessary)
Applicable to ITS !
(Summary talk of David Brown at the LHC Detector Alignment Workshop)
Catania November 2006 Adam Jacholkowski 66
OUTLOOK
Need to know what and how precisely will be measured during and after the installation (Torino) initial (mis)-alignment
Further cleaning/preparation of the alignment process infrastructure
Development and testing of the alignment procedures (highest priority for the barrel) using cosmics then pp
TPC calibration then inter-alignment with ITS Creation of the Alignment Task Force Preparation for different scenario (problems, data type) visualization (EVE) and monitoring tools (MOOD)
Catania November 2006 Adam Jacholkowski 67
Backup Slides
EXEMPLE OF AN ASSEMBLY
Catania November 2006 Adam Jacholkowski 68
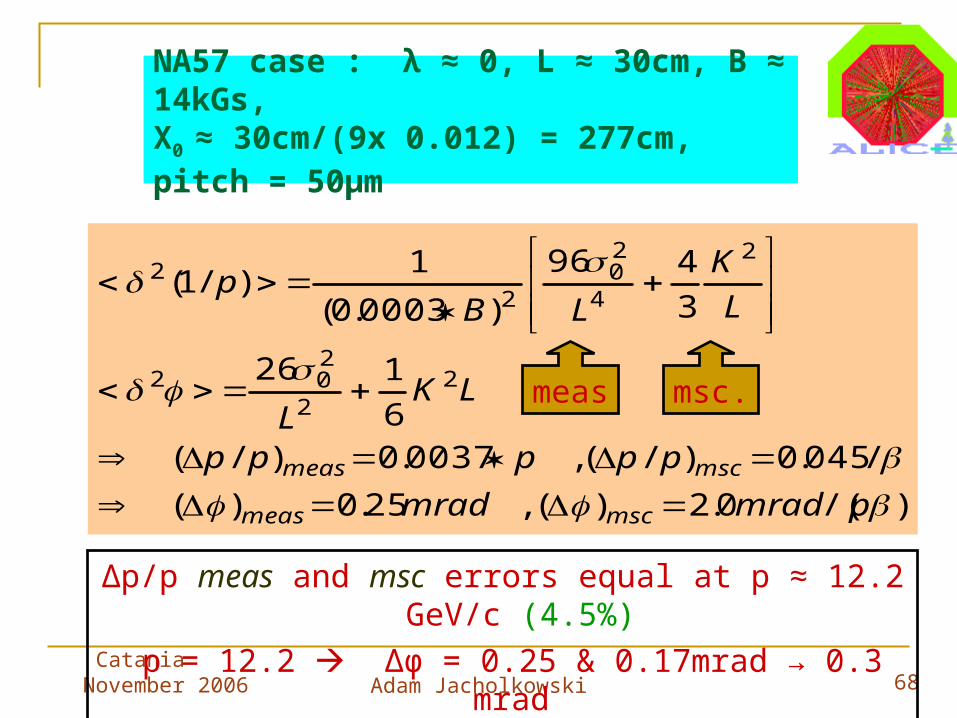
NA57 case : λ ≈ 0, L ≈ 30cm, B ≈ 14kGs,X0 ≈ 30cm/(9x 0.012) = 277cm, pitch = 50μm
)/(0.2)(,25.0)(
/045.0)/(,0037.0)/(6
126
3
496
)0003.0(
1)/1(
22
202
2
4
20
22
pmradmrad
ppppp
LKL
L
K
LBp
mscmeas
mscmeas
Δp/p meas and msc errors equal at p ≈ 12.2 GeV/c (4.5%)
p = 12.2 Δφ = 0.25 & 0.17mrad → 0.3 mrad
meas msc.
Catania November 2006 Adam Jacholkowski 69
Will we need pre-alignment ?
What to do if messy events at the start - no tracks found by the standard methods ??
Many possible problems: DAQ, trigger, channels mapping, software bugs…
Then careful debugging using display (well adapted) , histogramming, looking for hit correlations, exploiting detector overlaps etc.
REMEMBER – hard competition with ATLAS and CMS (first pp run) stay ready to face all sort of possible problems and be able to solve them quickly
Catania November 2006 Adam Jacholkowski 70
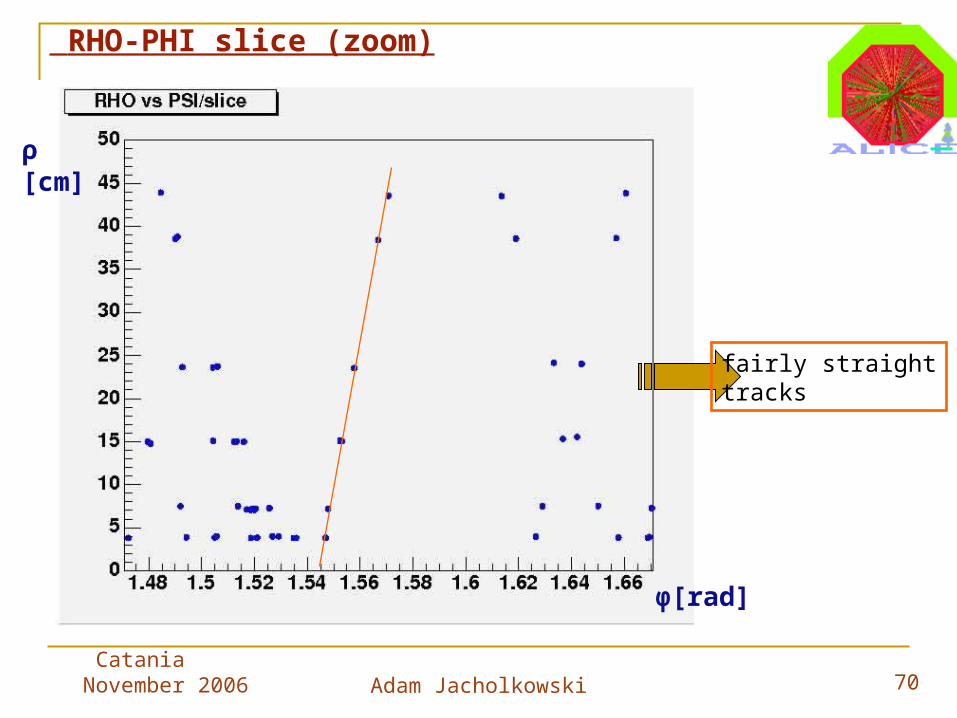
RHO-PHI slice (zoom)
φ[rad]
ρ[cm]
fairly straighttracks
Catania November 2006 Adam Jacholkowski 71
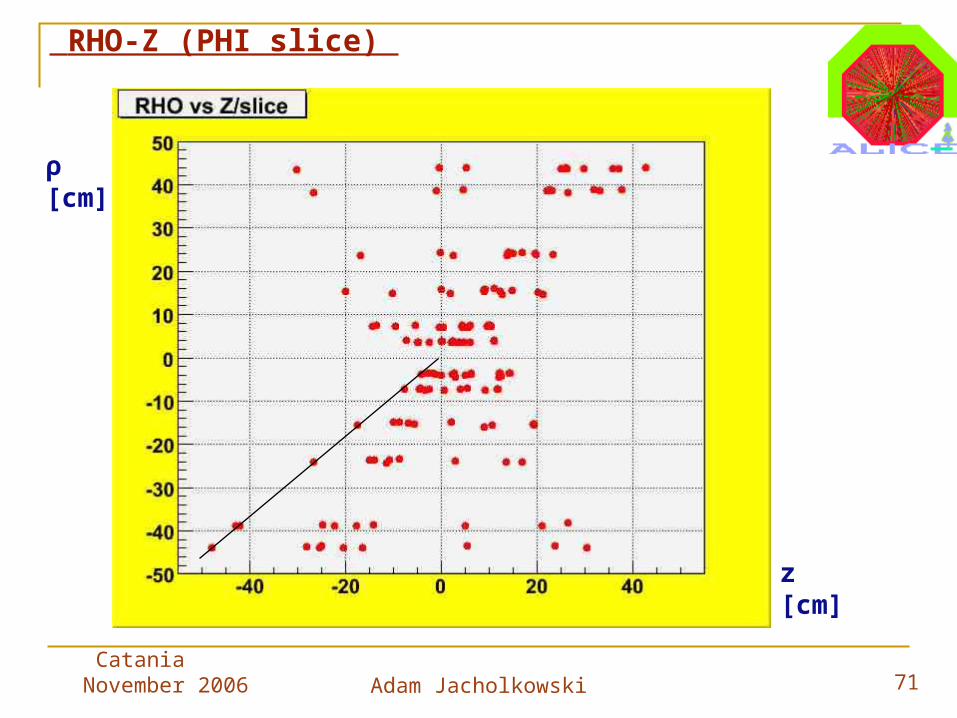
RHO-Z (PHI slice)
ρ[cm]
z[cm]
Catania November 2006 Adam Jacholkowski 72
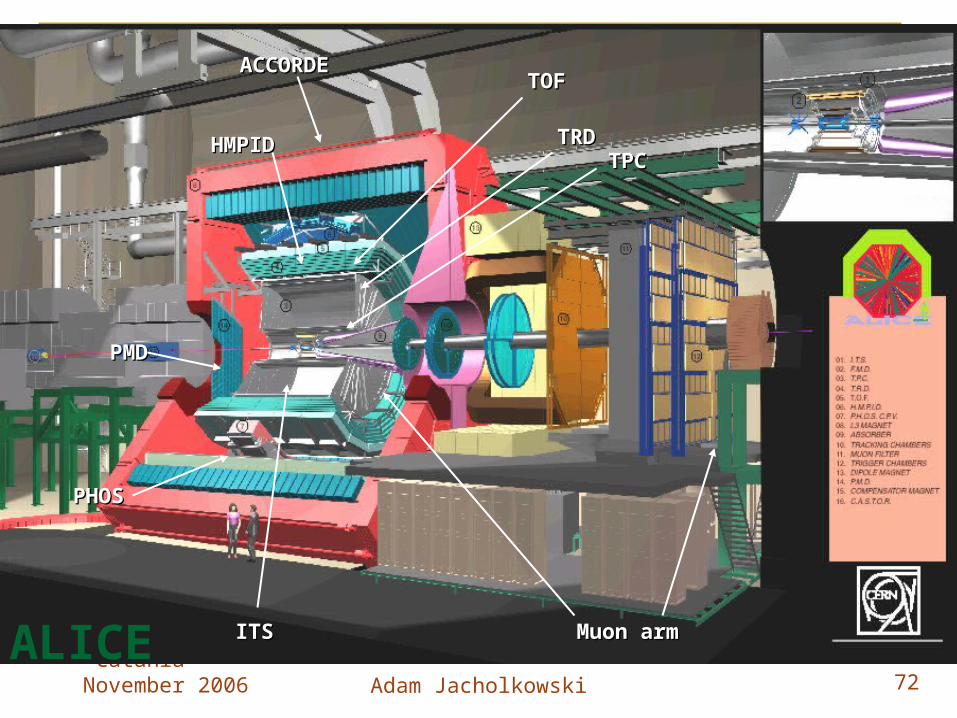
TPCTPC
PHOSPHOS
Muon armMuon arm
TOFTOF
TRDTRDHMPIDHMPID
PMDPMD
ITSITS
ACCORDEACCORDE
ALICE
Catania November 2006 Adam Jacholkowski 73
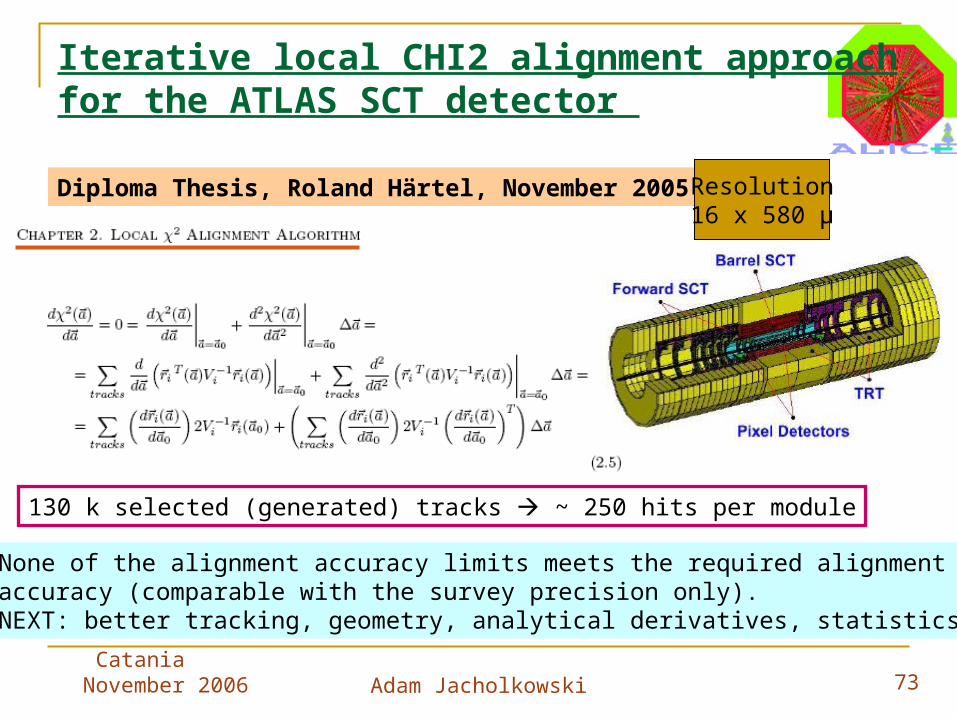
Iterative local CHI2 alignment approachfor the ATLAS SCT detector
Diploma Thesis, Roland Härtel, November 2005
130 k selected (generated) tracks ~ 250 hits per module
None of the alignment accuracy limits meets the required alignmentaccuracy (comparable with the survey precision only). NEXT: better tracking, geometry, analytical derivatives, statistics…
Resolution16 x 580 μ
Catania November 2006 Adam Jacholkowski 74
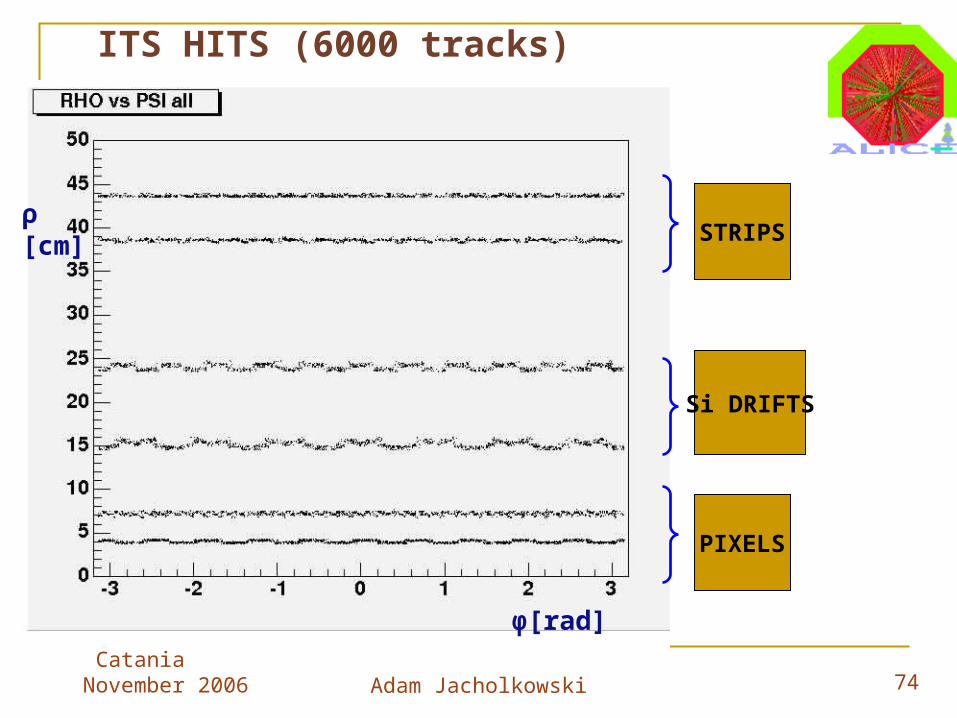
ITS HITS (6000 tracks)
PIXELS
Si DRIFTS
STRIPSρ[cm]
φ[rad]
Catania November 2006 Adam Jacholkowski 75
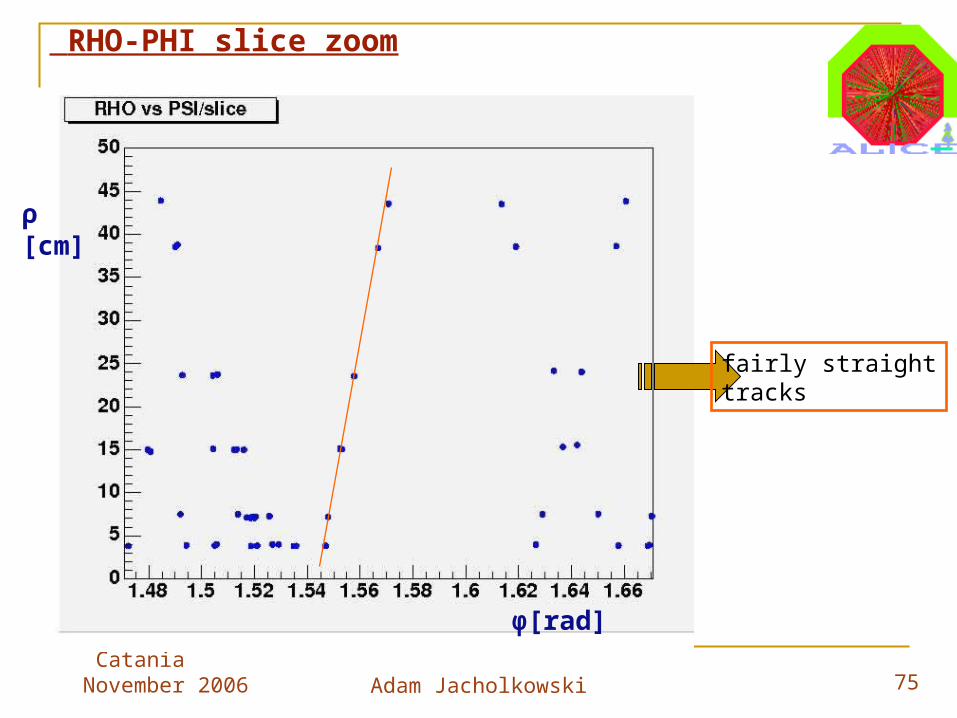
RHO-PHI slice zoom
φ[rad]
ρ[cm]
fairly straighttracks
Catania November 2006 Adam Jacholkowski 76
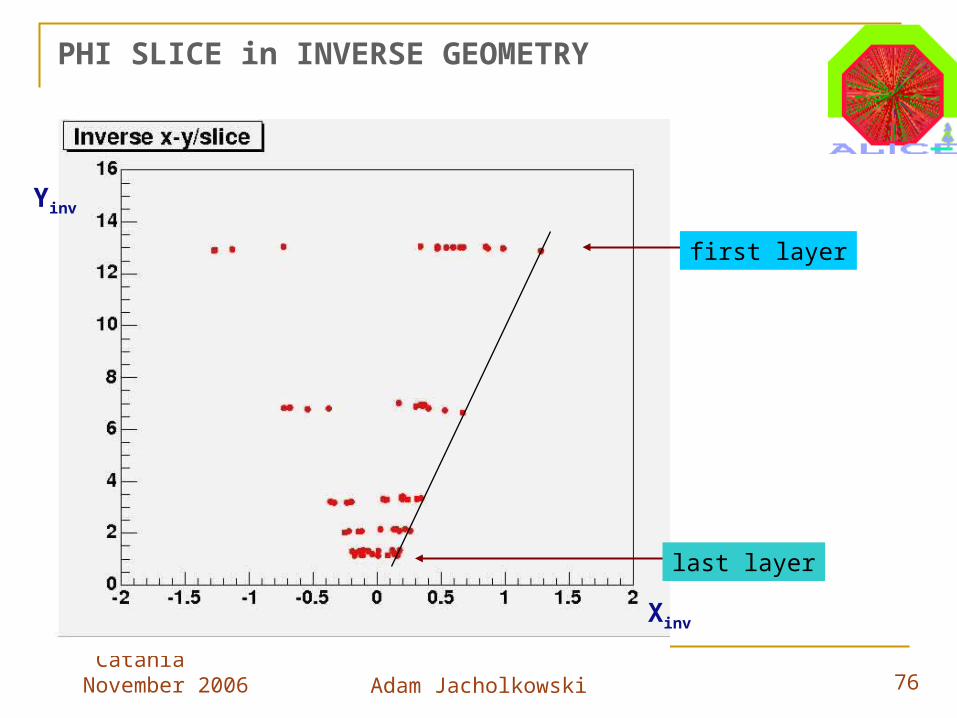
PHI SLICE in INVERSE GEOMETRY
Xinv
Yinv
first layer
last layer
Catania November 2006 Adam Jacholkowski 77
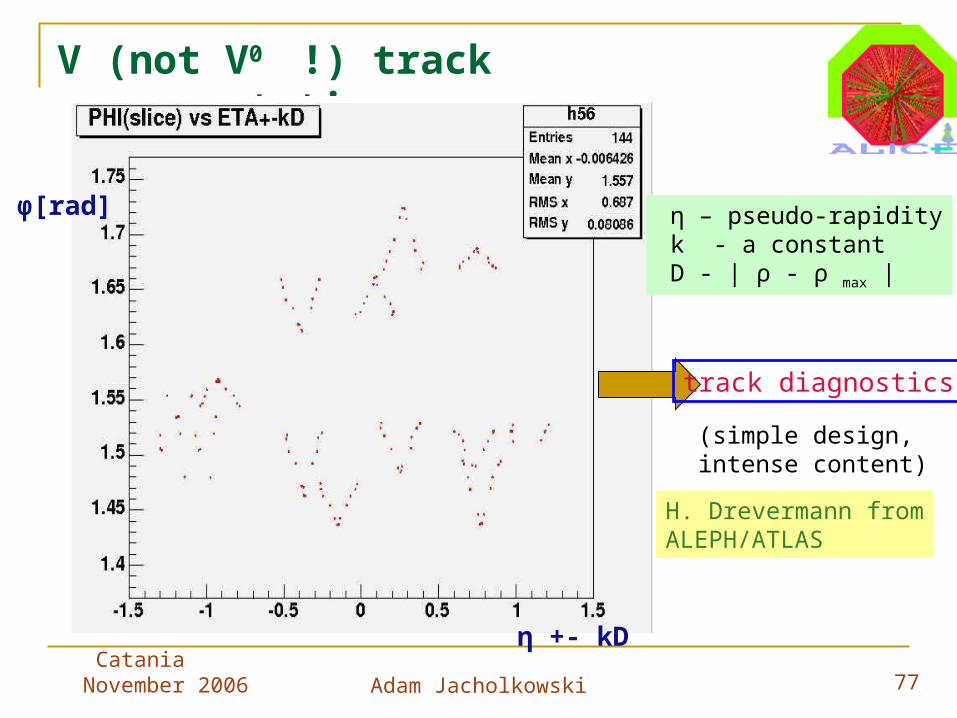
V (not V0 !) track representation
φ[rad]
η +- kD
η – pseudo-rapidity k - a constant D - | ρ - ρ max |
track diagnostics
(simple design,intense content)
H. Drevermann fromALEPH/ATLAS
Catania November 2006 Adam Jacholkowski 78
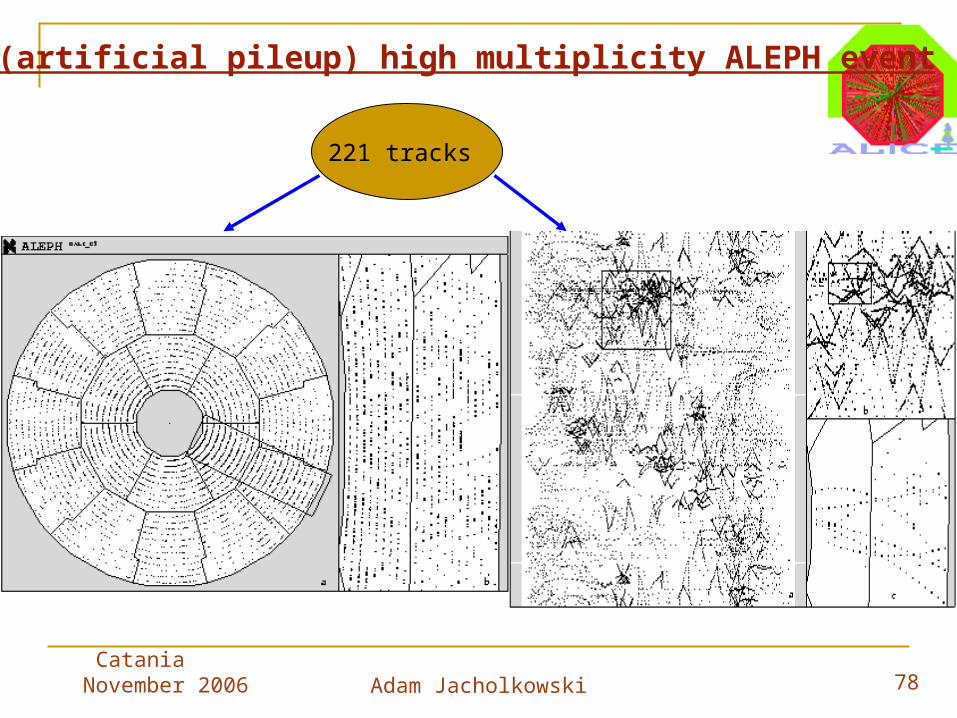
An (artificial pileup) high multiplicity ALEPH event
221 tracks
Catania November 2006 Adam Jacholkowski 79
MILESTONES