Embed Size (px)
DESCRIPTION
Affective Sensing through Processing of Physiological Signals Framework: Affective Sensing Interactio n Loop Physiologic al Signal Monitoring PD GSR BVP Affective Detection through Signal Processing Method Feature Selection and Extraction Affective Recognitio n through Machine Learning Algorithm SVM ROC Affectiv e Controll er PMPDmean ROC curve (AUROC = ) BVPL2H ROC curve (AUROC = ) GSRmean ROC curve (AUROC = )
Citation preview

Detection of Affective States in Human-Computer InteractionYing Gao
“Affective Sensing” needed for Affective Computing
Aim: To give computers the capability of reacting appropriately to their users’ emotional states.
COMPUTER
USER
User’s Affective
Model
Computer’s Affective
Model
AffectiveSensing
AffectExpression
Pre-Programmed Interplay Example Uses: Intelligent Tutoring System - Fatigue recognition
Student Engagement in ResearchArmando Barreto, Ph.D.
First Example:

GSR, BVP, PD
time (seconds)
volta
ge (v
olts
)GSR respnse
Stimulus
LatencyAmplitude
RiseTime
HalfRecoveryTime
Time (seconds)
Vol
tage
(vol
ts)
Amplitude
Period (IBI)
PupilPupil
GSR
BVP
PD

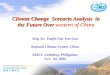
Affective Sensing through Processing of Physiological Signals
Framework:
Affective Sensing
Interaction Loop
Physiological Signal
MonitoringPD
GSR
BVP
Affective Detection through Signal
Processing MethodFeature
Selection and
Extraction
Affective Recognition through Machine Learning AlgorithmSVM
ROC
Affective
Controller
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
false positive rate
true
posi
tive
rate
ROC Curve of PMPDmean Signal
PMPDmean ROC curve (AUROC = 0.9331)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
False Positive Rate
True
Pos
itive
Rat
e
ROC and ROCCH Curve for Feature BVPl2h
BVPL2H ROC curve (AUROC = 0.5432)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
false positive rate
true
posi
tive
rate
ROC Curve of GSRmean Signal
GSRmean ROC curve (AUROC = 0.6780)

3D Sound for Human-Computer Interaction: Customization & Effective Areas
Kenneth John Faller
• Problem 1 – HRTFs vary from person to person . Must measure for each user or “customize”
• Problem 2 – Human accuracy in localizing sound source placement (real or virtual) varies around the listener What are the regions of maximum accuracy?
“Real” HRTFs
FIR
FIR
FIR
FIR
1.wav 2.wav
Emulated HRTFs
Digital filters
Second Example:

1 - Customization1-A: One approach to customization
requires DECOMPOSITION of the impulse response of the HRTFs (or “HRIRs”) into 2nd order functions that can be determined by physical ear measurements
1-B: Customization achieved by High-Order Singular Value Decomposition (HOSVD) Tensor Model

2- Identification of most accurate regions (elevation ranges)
Explored accuracy at +/- 90o
azimuth and different elevations
•(a) “Generic HRIRs provided the lowest performance)
•(b) Elevations between -18º and 18º yield the best accuracy
•(c) Localization accuracy degrades differently for different types of HRIRs. Generic HRIRs suffered the worst degradation.
CONCLUSIONS:

The FIU CREST Students
Dr. Ying Gao• (PhD FIU EE – Fall 2009)• Currently Visiting Instructor at the
Electrical & Computer Engineering Department, FIU
Dr. Kenneth J. Faller• (PhD FIU EE – Summer 2009)• Currently Post-doctoral Fellow at the
Structural Acoustics Branch (StAB) of NASA Langley Research Center
1 2