Embed Size (px)
Citation preview
DESIgN Of A DOCkINg STATION fOR AuTONOmOuS uNDERWA-TER VEHIClES (AuV) RECHARgE AND DATA DOWNlOAD
m.Nogueras, A.mànuelSARTI Research group, Electronics Dept., universitat politècnica de Catalunya (upC), Rambla Exposició 24, Ed. C, 08800 Vilanova i la geltrú, +(34) 938967200. www.cdsarti.org. [email protected]
SUMMARyReview of the existing solutions for AUVs (Autonomous Underwater Ve-hicle) docking stations and study of its applicability in the OBSEA (Ex-pandable Seafloor Observatory) for the recharge and data download of the Guanay II AUV developed by the SARTI research group. The project will develop the position control system, for AUV approaching to the docking; acoustic beacon, USBL location system and artificial vision system for relative location of the AUV in respect to the docking; latch-ing mechanism to engage the AUV to the docking; power and data in-terface systems to recharge batteries and data download; and Lunch and Recovery (LAR) system to deploy and recover the docking and AUV from a support vessel.
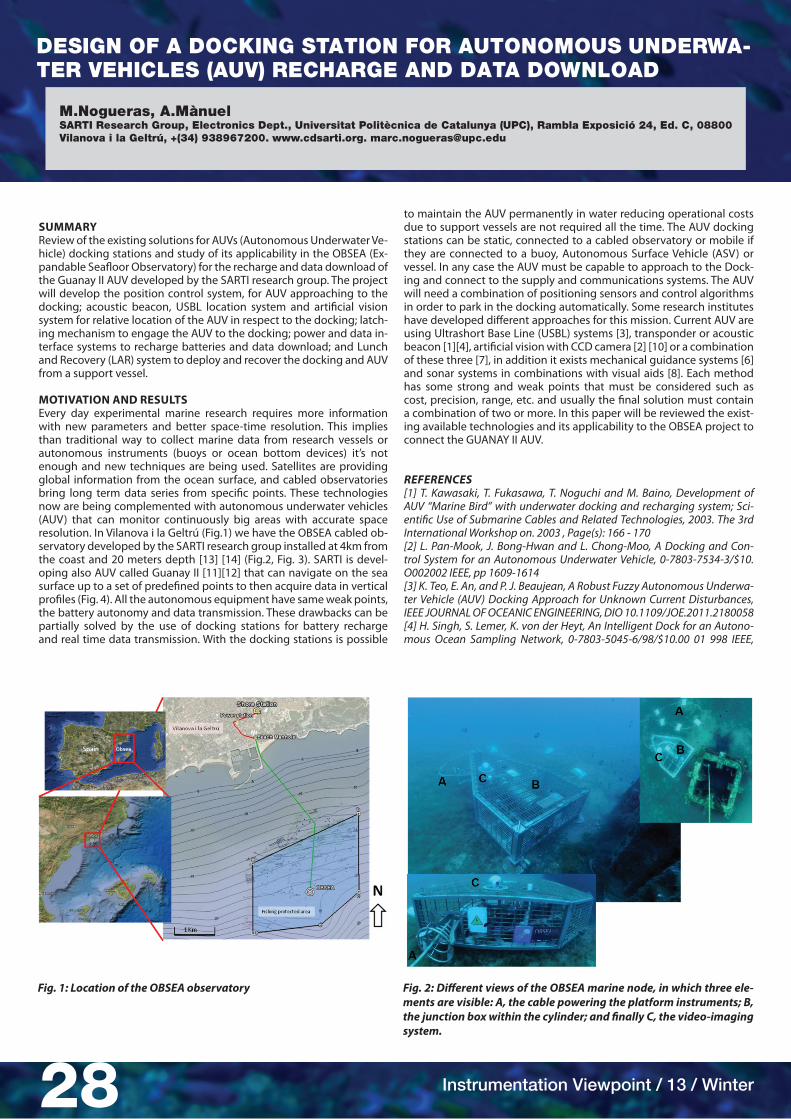
MOTIvATION AND RESULTSEvery day experimental marine research requires more information with new parameters and better space-time resolution. This implies than traditional way to collect marine data from research vessels or autonomous instruments (buoys or ocean bottom devices) it’s not enough and new techniques are being used. Satellites are providing global information from the ocean surface, and cabled observatories bring long term data series from specific points. These technologies now are being complemented with autonomous underwater vehicles (AUV) that can monitor continuously big areas with accurate space resolution. In Vilanova i la Geltrú (Fig.1) we have the OBSEA cabled ob-servatory developed by the SARTI research group installed at 4km from the coast and 20 meters depth [13] [14] (Fig.2, Fig. 3). SARTI is devel-oping also AUV called Guanay II [11][12] that can navigate on the sea surface up to a set of predefined points to then acquire data in vertical profiles (Fig. 4). All the autonomous equipment have same weak points, the battery autonomy and data transmission. These drawbacks can be partially solved by the use of docking stations for battery recharge and real time data transmission. With the docking stations is possible
Instrumentation Viewpoint / 13 / Winter28
Fig. 1: Location of the OBSEA observatory Fig. 2: Different views of the OBSEA marine node, in which three ele-ments are visible: A, the cable powering the platform instruments; B, the junction box within the cylinder; and finally C, the video-imaging system.
to maintain the AUV permanently in water reducing operational costs due to support vessels are not required all the time. The AUV docking stations can be static, connected to a cabled observatory or mobile if they are connected to a buoy, Autonomous Surface Vehicle (ASV) or vessel. In any case the AUV must be capable to approach to the Dock-ing and connect to the supply and communications systems. The AUV will need a combination of positioning sensors and control algorithms in order to park in the docking automatically. Some research institutes have developed different approaches for this mission. Current AUV are using Ultrashort Base Line (USBL) systems [3], transponder or acoustic beacon [1][4], artificial vision with CCD camera [2] [10] or a combination of these three [7], in addition it exists mechanical guidance systems [6] and sonar systems in combinations with visual aids [8]. Each method has some strong and weak points that must be considered such as cost, precision, range, etc. and usually the final solution must contain a combination of two or more. In this paper will be reviewed the exist-ing available technologies and its applicability to the OBSEA project to connect the GUANAY II AUV.
REFERENCES[1] T. Kawasaki, T. Fukasawa, T. Noguchi and M. Baino, Development of AUV “Marine Bird” with underwater docking and recharging system; Sci-entific Use of Submarine Cables and Related Technologies, 2003. The 3rd International Workshop on. 2003 , Page(s): 166 - 170[2] L. Pan-Mook, J. Bong-Hwan and L. Chong-Moo, A Docking and Con-trol System for an Autonomous Underwater Vehicle, 0-7803-7534-3/$10.O002002 IEEE, pp 1609-1614[3] K. Teo, E. An, and P. J. Beaujean, A Robust Fuzzy Autonomous Underwa-ter Vehicle (AUV) Docking Approach for Unknown Current Disturbances, IEEE JOURNAL OF OCEANIC ENGINEERING, DIO 10.1109/JOE.2011.2180058[4] H. Singh, S. Lemer, K. von der Heyt, An Intelligent Dock for an Autono-mous Ocean Sampling Network, 0-7803-5045-6/98/$10.00 01 998 IEEE,
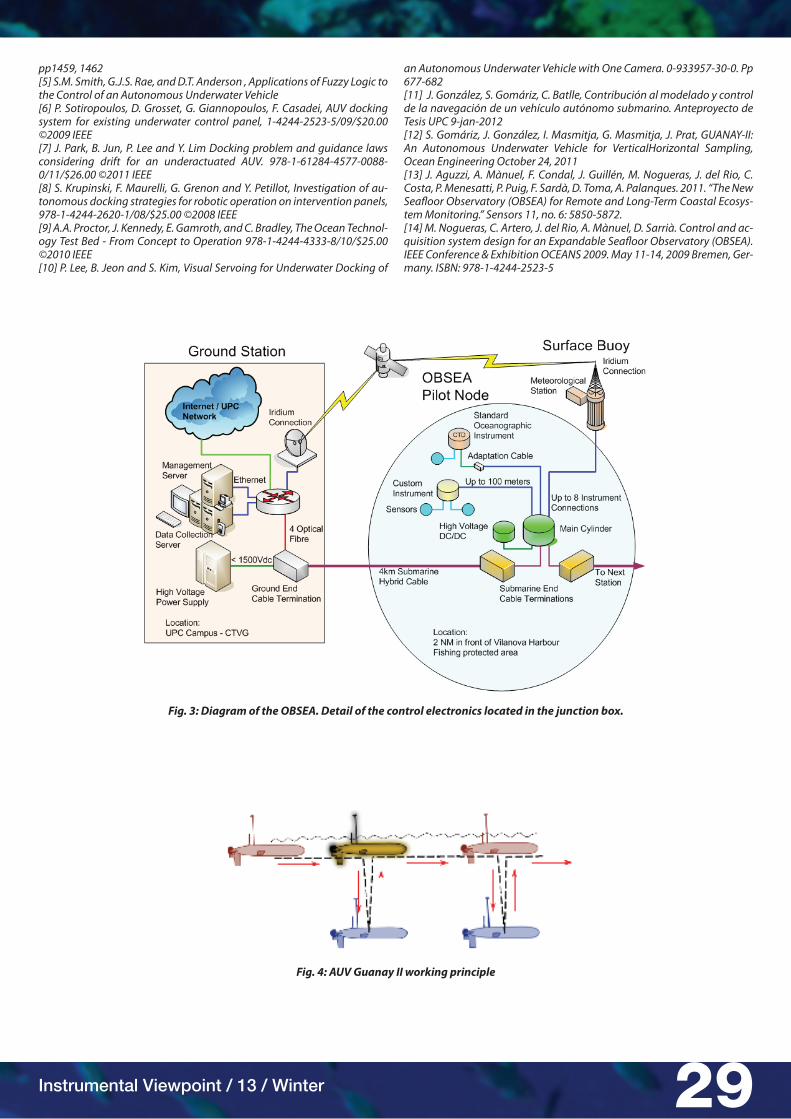
Fig. 3: Diagram of the OBSEA. Detail of the control electronics located in the junction box.
Fig. 4: AUV Guanay II working principle
Instrumental Viewpoint / 13 / Winter 29
pp1459, 1462[5] S.M. Smith, G.J.S. Rae, and D.T. Anderson , Applications of Fuzzy Logic to the Control of an Autonomous Underwater Vehicle[6] P. Sotiropoulos, D. Grosset, G. Giannopoulos, F. Casadei, AUV docking system for existing underwater control panel, 1-4244-2523-5/09/$20.00 ©2009 IEEE[7] J. Park, B. Jun, P. Lee and Y. Lim Docking problem and guidance laws considering drift for an underactuated AUV. 978-1-61284-4577-0088-0/11/$26.00 ©2011 IEEE[8] S. Krupinski, F. Maurelli, G. Grenon and Y. Petillot, Investigation of au-tonomous docking strategies for robotic operation on intervention panels, 978-1-4244-2620-1/08/$25.00 ©2008 IEEE[9] A.A. Proctor, J. Kennedy, E. Gamroth, and C. Bradley, The Ocean Technol-ogy Test Bed - From Concept to Operation 978-1-4244-4333-8/10/$25.00 ©2010 IEEE[10] P. Lee, B. Jeon and S. Kim, Visual Servoing for Underwater Docking of
an Autonomous Underwater Vehicle with One Camera. 0-933957-30-0. Pp 677-682[11] J. González, S. Gomáriz, C. Batlle, Contribución al modelado y control de la navegación de un vehículo autónomo submarino. Anteproyecto de Tesis UPC 9-jan-2012[12] S. Gomáriz, J. González, I. Masmitja, G. Masmitja, J. Prat, GUANAY-II: An Autonomous Underwater Vehicle for VerticalHorizontal Sampling, Ocean Engineering October 24, 2011[13] J. Aguzzi, A. Mànuel, F. Condal, J. Guillén, M. Nogueras, J. del Rio, C. Costa, P. Menesatti, P. Puig, F. Sardà, D. Toma, A. Palanques. 2011. “The New Seafloor Observatory (OBSEA) for Remote and Long-Term Coastal Ecosys-tem Monitoring.” Sensors 11, no. 6: 5850-5872.[14] M. Nogueras, C. Artero, J. del Rio, A. Mànuel, D. Sarrià. Control and ac-quisition system design for an Expandable Seafloor Observatory (OBSEA). IEEE Conference & Exhibition OCEANS 2009. May 11-14, 2009 Bremen, Ger-many. ISBN: 978-1-4244-2523-5