Embed Size (px)
Citation preview

1
lfrem
erVR to DL for UUST
2
lfrem
er
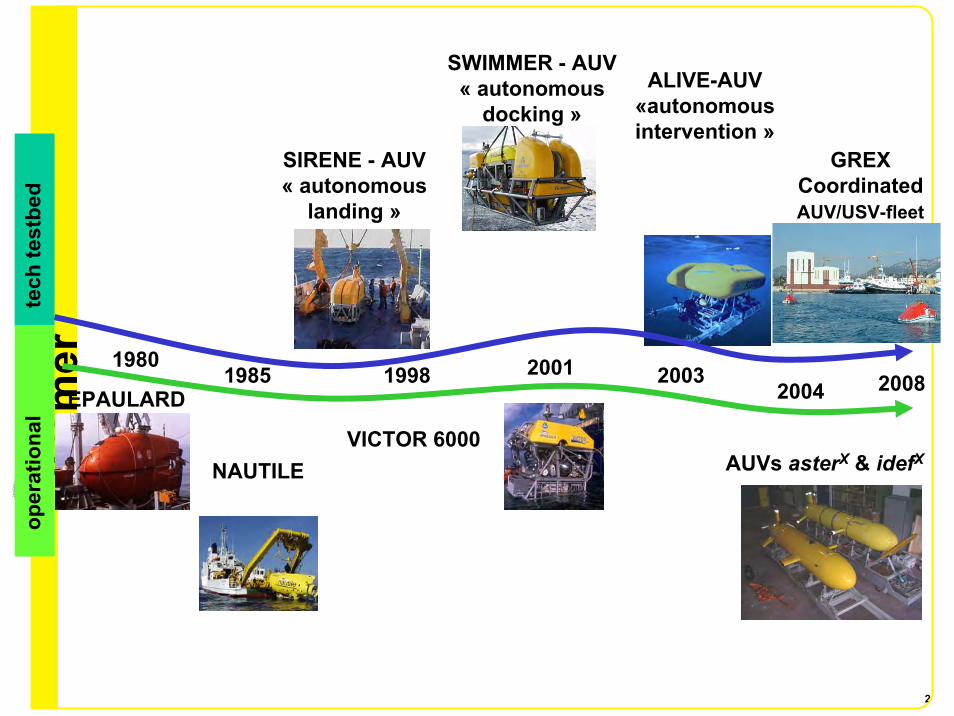
EPAULARD
SWIMMER - AUV« autonomous
docking »ALIVE-AUV
«autonomousintervention »
198020082003200119981985
2004
GREX CoordinatedAUV/USV-fleet
SIRENE - AUV« autonomous
landing »
NAUTILEVICTOR 6000
AUVs asterX & idefX
oper
ati o
nal
tec h
tes t
bed

3
lfrem
erRand D versus operationnal systems
After Epaulard, developed for polymetalic nodules survey program, Ifremer has frosen AUV Development and has focused on Deep Sea ROV and Manned Sub Nautile mainly for deep sea research observation and intervention.
Contributive R and D mainly active in collaboration in the offshore domain since 1993 with numerous world first in intervention and inspection AUV (SIRENE,ALIVE,WIMMER): Technological and economical push
Evolution of programs from « observation » to « survey » of the environment : new tools are needed to optimized data collection and interpretation Scientifical and operational programs pull
4
lfrem
er
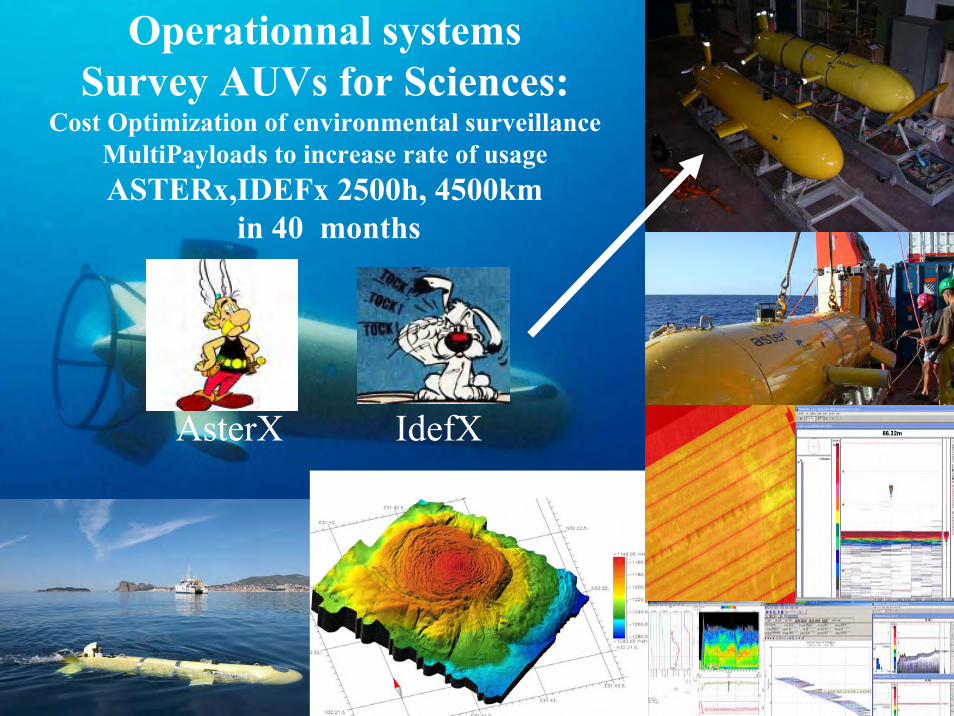
Operationnal systemsSurvey AUVs for Sciences:
Cost Optimization of environmental surveillanceMultiPayloads to increase rate of usageASTERx,IDEFx 2500h, 4500km
in 40 months
AsterX IdefX

5
lfrem
erGeophysics payloadmultibeam – subbottom profiler – gas detection - magnetometer
iXSEA echoes 10000
Kongsberg EM2000
EM2000 (imagery)
Kongsberg EK60 (gas plume)

6
lfrem
erEnvironment and fisheries payloadmultibeam – subbottom profiler – gas detection - magnetometer
iXSEA EK60 70 KHzdownwards orientation
iXSEA EK60 200 KHzupwards orientation
RDI ADCP 1200 KHzupwards orientation(monitoring of fine layers)
RDI ADCP 300 KHz(current modelling)
Satlantic ISUSnitrate sensor(Septembre ’08)

7
lfrem
er
!AUV1 asterX 10 8 14 12 10 10 21 6 14 6 0 9 120AUV2 idefX 10 10 6 10 14 6 5 10 71
0multibeam echo-sounder 17 5 9 6 0 6 6 9 58fich sounder EK60 8 12 1 10 31subbottom profiler 8 6 14ADCP & physical parameters 10 10 4 5 10 39
20082004 2005 2006 2007
Operational results28 cruises – incl. 12 technical – on 7 different vessels4500km of survey (In Day Dive)
8
lfrem
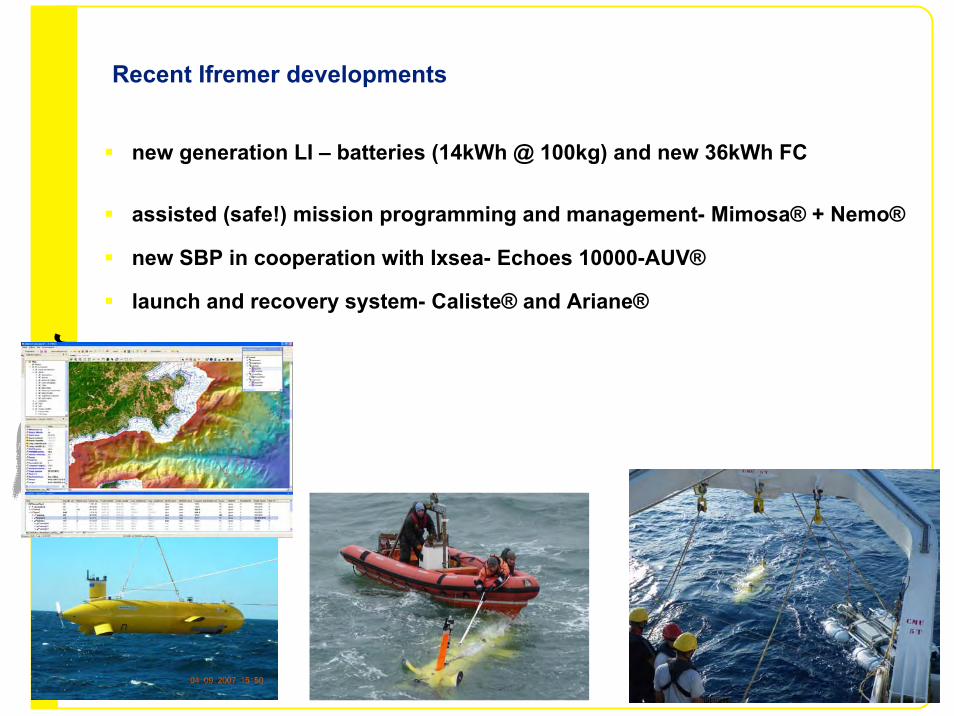
erRecent Ifremer developments
! new generation LI – batteries (14kWh @ 100kg) and new 36kWh FC
! assisted (safe!) mission programming and management- Mimosa® + Nemo®
! new SBP in cooperation with Ixsea- Echoes 10000-AUV®
! launch and recovery system- Caliste® and Ariane®

9
lfrem
erlaunch and recovery cage
CALYSTE ®

10
lfrem
erFuel Cell: H2/02 experiment
Objective 300kms without payload36kWh, Vehicle Weight +800kgs Lenght + 1m

11
lfrem
erSeaExplorer® : A new « wingless »
Coastal Glider(under development with ACSA, ACRI and CNRS)
Shape optimisationNew large volume low consumption optimised Ballast system (Oil and air)Possible hybrid mode with a propelled versionGlider men intelligent mission programming andsupervision

12
lfrem
erTypical scenario for hybrid AUV operation
Fixed platform or FPSO

13
lfrem
erExamples of hybrid AUVs
Swimmer(Cybernetix/ifremer ) SAILARS (Mentor Subsea
Technologies)

14
lfrem
erHow a hybrid AUV operates
1 Launch2 Transit3 Approach4 Docking5 ROV operations
(Cybernetrix-Ifremer Swimmer)

15
lfrem
erIntervention AUV
a multi-purpose AUV
• fitted with manipulators• operated in acustically-supervised mode• able to dock to the infrastructure and interact
with it
ALIVE (Ifremer/Cybernetix)

16
lfrem
er

17
lfrem
erRandD ALIVE :
Sea trials campaign October 2003
" docking structure installed at 70 m depth
" docking and telemanipulation tasks achieved succesfully
1Docking panel before intervention:valve in horizontal position
2Docking panel after intervention:valve in vertical position

18
lfrem
erBASIL-NAV3000 / Coordinated Fleet

19
lfrem
erSubstech: eneric Docking process with sonar and video
3
5
6
2
74 5
2
1
6
3
8
9
1. Seabed structure
2. Docking ring
3. Optic markers
4. OBS and receptacle
5. Vehicle camera
6. Scanning sonar
7. AUV
8. Sonar reflector
9. Grabbers

20
lfrem
erHeterogeneus autonomous marine vehicles
…what are they?
AUV AutonomousUnderwaterVehicles
ASV AutonomousSurface Vehicles
… and:
Autonomousaerial drones,
ROVs,….
UnderwaterGliders
21
lfrem
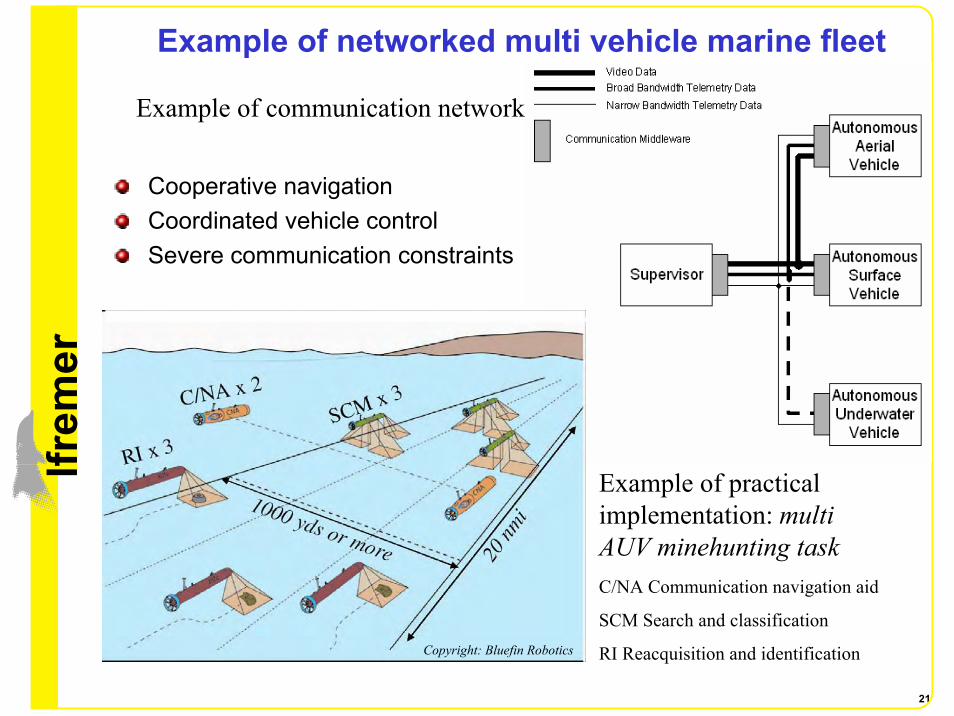
erExample of networked multi vehicle marine fleet
Example of communication network
Copyright: Bluefin Robotics
C/NA Communication navigation aid
SCM Search and classification
RI Reacquisition and identification
Example of practicalimplementation: multi AUV minehunting task
Cooperative navigationCoordinated vehicle controlSevere communication constraints

22
lfrem
erGREX project
Scientific scenario example: fish tag tracking
Control and coordination under communication constraints
Cooperative navigation
Mission profile replanning
Development partners:IFREMER(F), Atlas Elektronik (D), IST (P), SeeByte (GB), SCIANT (BG), TUI (D), MC(D), INNOVA (I)
Control and coordination of multiple cooperative marine vehiclesDevelopment at all levels: mission planning, coordinated control, underwater communication network, cooperative navigation, multi vehiclemission control and replanningReal time application using existing vehicles (from Ifremer, Atlas and IST)

23
lfrem
erConNeCT project : Control of Networked
Cooperative sysTems
Gradient search for source detection:
Distributed sensing and coordinatedcontrol
Development partners:IFREMER, CNRS-INRIA NECS, Prolexia, PGES
Development of control architectures to support the operation of networked systems performing a task.Case study: application to marine vehiclesDevelopment of a multi vehicle simulator to enable validation of results

24
lfrem
erToward coordination of heterogeneous fleets
1 24
120120120
120120120
v1
v2
3 120120120
v2
1. Vortex (subsurface) and Asterx (deepwater) navigate at different velocities2. Rendezvous point for acoustic communication – vertical channel3. Radio relay4. Next rendezvous point

25
lfrem
erNext RandD
- Integrated systems made of NetworkedHeterogeneous Autonomous systems
- Hybrid ROV-AUV system with Hovering capacitiesfor Habitat mapping, quick inspection and intervention on future observatories