Embed Size (px)
Citation preview

MODELOWANIE INŻYNIERSKIE 2016 nr 58 ISSN 1896-771X
24
DESIGN AND TESTING OF TWO-WHEELED
ROBOT WITH CHAOTIC PENDULUM
Kamil Fedio1, Maksym Kiełkowski1, Andrzej Katunin1a,
Wawrzyniec Panfil1b
1Institute of Fundamentals of Machinery Design, Silesian University of Technology [email protected] [email protected]
Summary This paper deals with a theoretical modeling of equations of motion, simulation motion of and control both in vir-
tual environments and in real-world conditions of a balancing two-wheeled robot with a double pendulum. By tak-
ing into consideration a motion of a double pendulum one needs to consider chaotic behavior of the whole system
resulted by this pendulum, which is a significant difficulty in development of control algorithms. The main goal of
the presented study is to reach dynamic balancing of a two-wheeled robot with a double pendulum under the cer-
tain scenarios of equilibrium disturbance. In order to apply appropriate control algorithms the following steps
were assumed during the development of a robot: theoretical modelling of a motion of the composite system of in-
verted and double pendulums, stability analysis, simulation of various scenarios in virtual environments using the
developed control algorithms, and construction of a physical model of a robot and verification of control algo-
rithms. Both simulation and experimental studies demonstrated the successful balancing performance.
Keywords: two-wheeled robot, inverted pendulum, double pendulum, chaotic motion, non-linear control,
balancing stability
PROJEKT I TESTOWANIE DWUKOŁOWEGO ROBOTA
Z WAHADŁEM CHAOTYCZNYM
Streszczenie Artykuł dotyczy teoretycznego modelowania równań ruchu, symulacji ruchu i sterowania balansującego robota
dwukołowego z podwójnym wahadłem zarówno w środowiskach wirtualnych, jak i w warunkach rzeczywistych.
Biorąc pod uwagę ruch podwójnego wahadła, należy uwzględnić chaotyczny sposób działania całego układu spo-
wodowany ruchem tego wahadła, co stanowi istotną trudność przy opracowywaniu algorytmów sterowania. Głów-
nym celem prezentowanej pracy jest uzyskanie stanu stabilności dynamicznej robota dwukołowego z podwójnym
wahadłem według poszczególnych scenariuszy zaburzenia jego równowagi. W celu zastosowania odpowiednich al-
gorytmów sterowania następujące etapy zostały założone podczas opracowania robota: teoretyczne modelowanie
ruchu układu złożonego z odwróconego i podwójnego wahadeł, analiza stabilności, symulacja różnych scenariuszy
w środowiskach wirtualnych z zastosowaniem opracowanych algorytmów sterowania oraz opracowanie modelu fi-
zycznego robota i weryfikacja algorytmów sterowania. Zarówno prace symulacyjne, jak i eksperymentalne wykaza-
ły zdolność do utrzymania równowagi.
Słowa kluczowe: robot dwukołowy, wahadło odwrócone, wahadło podwójne, ruch chaotyczny, sterowanie nie-
liniowe, stabilność dynamiczna
1. INTRODUCTION
Balancing systems are quite attractive for numerous
researchers since the static balancing control is one of
the crucial concepts used in applications of walking
control of humanoid robots [1,2]. The two-wheeled

KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
25
system, which is an inverted pendulum in the physical
sense, since the center of mass is located above the
wheel axis, found wide popularity in numerous applica-
tions to-date, e.g. two-wheeled self-balanced vehicles
(Segway), Toyota’s personal transporter [3], and other
transportation systems [4,5]. An inverted pendulum
model is often used as a benchmark model for testing
control algorithms [6-8]. Therefore, the robustness of
such a system to external disturbances has a great
practical importance.
Several studies on stability and balancing control of
inverted pendulum-type systems were already performed
using various methods and control algorithms which
were experimentally verified in most cases. Yamakawa
described in [9] a high-speed fuzzy logic controller ap-
plied for stabilization of an inverted pendulum; the
authors of [4,10] developed a control approach based on
artificial neural networks; the authors of [11,12] used a
solution based on PID controller; while Chiu presented
an advanced controller – adaptive output recurrent
cerebellar model articulation controller used for the
problem of balancing control of inverted pendulum-type
systems [13]. The global stabilization studies with exper-
imental verification were performed by Srinivasan et al.
[14]. The more advanced cases of balancing control,
including parallel-type double inverted pendulum [15]
and multiple inverted pendulums [16-20], were also
studied and experimentally verified. These systems are
highly nonlinear, but still deterministic.
Recently, the great interest is paid to highly nonlinear
systems which reveal chaotic behavior globally or under
certain conditions. Ones of the simplest systems that
reveal chaotic behavior are double, triple and multiple
mathematical pendulums. A series of original studies on
the dynamics and stability of such chaotic systems were
performed by Awrejcewicz and his team (see e.g. [21-23])
and other researchers [24-26], including previous studies
of the authors’ team [27]. In order to control the motion
of such chaotic systems a different class of control
algorithms was developed. Generally, two types of
approaches of control chaotic systems can be distin-
guished: feedback control and non-feedback control,
which focus on periodization of chaotic motion of multi-
ple pendulum-type systems [28-30]. Another problem of
controlling chaotic systems is tending to stabilization of
a system. For solving a class of problems of stabilization
of chaotic oscillations several approaches were proposed:
de Korte et al. [31] used semi-continuous control meth-
od, Guan et al. [32] proposed an impulsive control
method, while Awrejcewicz et al. [33] used a feedback
control approach.
The system investigated in the present study is a two-
wheeled robot with double chaotic pendulum which can
be considered, from the point of view of its kinematics,
as a composite of inverted pendulum and double chaotic
pendulum. In the best of the authors’ knowledge, such
system was not previously investigated elsewhere.
2. MOTIVATION
AND ASSUMPTIONS
The main goal of the designed robot was to develop
effective and simple control algorithms which allow
reaching dynamic balancing of a robot without any
external loading and under the certain scenarios of
equilibrium disturbance. This goal was reached by
performing consequent steps in the performed study,
namely: theoretical modeling of a system with further
analysis of its stability and simulation tests using vari-
ous control algorithms, design of a robot and performing
simulation tests in a virtual environment, and finally,
physical implementation of a robot and verification tests
of implemented algorithms.
At the beginning of development of both mathemati-
cal model and mechatronic physical system four most
important groups of assumptions were applied.
The assumptions of theoretical model were as fol-
lows: simplification of a kinematic model due to sym-
metry (from 3D to 2D); discretization of a model of
composite system of inverted and double chaotic pendu-
lums to the form of three limbs with point masses
located in their geometric centers; the limbs are perfect-
ly rigid, and the last two of them are of the same
lengths and masses; inertial forces of each limb are high
enough to influence on each other limb.
The functional assumptions covered a condition of
holding the vertical position of a whole robot considering
scenarios when the stability of the robot is disturbed
(including reaction on motion of chaotic pendulum), and
minimization of sliding during balancing.
The third group covered hardware assumptions of
the developed robot, namely: wheels of a robot should
be rigid enough to neutralize the effect of gravitational
deflection and their diameter should be at least the same
as the width of the robot frame, and the motor should
be a high-speed in order to react on disturbances timely
with a possibility of mounting encoders.
The last group of assumptions was concerned to the
control hardware system and covered the following ones:
the applied platform should allow rapid control proto-
typing; quick and low-cost components for control
system (regulators, sensors, cable connections); the only
sensors are the accelerometer and the gyroscope mount-
ed in the axis of rotation of wheels should allow satisfy-
ing the measurement data stream enough for effective
control.
Following the presented groups of assumptions the
theoretical model as well as hardware implementation of
the designed robot were performed.

DESIGN AND TESTING OF TWO-WHEELED ROBOT WITH CHAOTIC PENDULUM
26
3. THEORETICAL MODEL
3.1 EQUATIONS OF MOTION
Considering the assumptions to the mathematical model
presented above, the following notion should be intro-
duced: the same masses mmm == 21 and lengths
lll == 21 of a chaotic pendulum limbs. Since the system
has four degrees of freedom, then four generalized coor-
dinates should be introduced: translation coordinate x,
and three rotation coordinates for each limb: �1, �2, �3.
The kinematic scheme of the considered system is pre-
sented in Fig.1.
In order to obtain equations of motion of the analyzed
system one need to minimize the action functional
which, in consequence, is a Lagrangian:
VEL −= , (1)
where E and V are the kinetic and potential energies of
a system, respectively.
Fig. 1. Kinematic scheme of the analyzed system
Considering the equations of inverted pendulum (see e.g.
[11]) and a double chaotic pendulum (see e.g. [27]), the
kinetic energy for the analyzed system takes a form:
( )22
21
233
20
2
1mvmvvmMvE +++= , (2)
where
2
20
∂
∂=
t
xv , (3)
2
333
2
3332
3 sin2
1cos
2
1
∂
∂−+
∂
∂+
∂
∂= θ
θθ
θl
tl
tt
xv ,(4)
2
11
3332
1 cos2
1cos
∂
∂+
∂
∂+
∂
∂= θ
θθ
θl
tl
tt
xv
2
11
333 sin
2
1sin
∂
∂−
∂
∂−+ θ
θθ
θl
tl
t, (5)
2
22
11
3332
2 cos2
1coscos
∂
∂+
∂
∂+
∂
∂+
∂
∂= θ
θθ
θθ
θl
tl
tl
tt
xv
2
22
11
333 sin
2
1sinsin
∂
∂−
∂
∂−
∂
∂−+ θ
θθ
θθ
θl
tl
tl
t,(6)
while the potential energy is given by:
−+= 133333 cos
2
1coscos
2
1θθθ lmlmV
−−+ 2133 cos
2
1coscos θθθ lllm . (7)
Using (1) one can obtain the Lagrange equation. Using
the Lagrange equation of a second kind:
=∂
∂−
∂
∂
∂
∂
=∂
∂−
∂
∂
∂
∂
=∂
∂−
∂
∂
∂
∂
=∂
∂−
∂
∂
∂
∂
0
0
0
22
11
33
θθ
θθ
θθ
LL
t
LL
t
LL
t
Fx
L
x
L
t
&
&
&
&
(8)
where F is an excitation force of a mass M in the direc-
tion of a vector x. The dots in (8) mean derivatives of
particular variables over a time. Using (2)-(7) in (8) one
obtains the system of equations as follows:
∂
∂+
∂
∂−
∂
∂+
2
12
12
22
22
22
2 cos3sincos2
1
ttt
lmθ
θθ
θθ
θ
Ft
=
∂
∂−
2
12
1sin3θ
θ , (9a)
( ) ( )( mmlt
mmt
xl 8sin4cos2 33
2232
32
32
2
33 +∂
∂++
∂
∂θ
θθ
( ))
∂
∂+++
2
22
323332
sinsin28cost
mllmmθ
θθθ
( )
+
∂
∂−
∂
∂+++
∂
∂mlml
tt
mmM
t
x
3332
32
32
32
332
2
22
1sincos2
θθ
θθ

KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
27
2
12
312
12
312
22
32 sincos3sinsin3sincosttt ∂
∂+
∂
∂+
∂
∂+
θθθ
θθθ
θθθ
2
12
312
22
322
22
32 coscos3cossincoscosttt ∂
∂+
∂
∂−
∂
∂+
θθθ
θθθ
θθθ
( ) 0sin2coscos3 3332
12
31 =+−
∂
∂− mml
tθ
θθθ ,(9b)
( 313132
32
2
2
1 coscossinsincos6 θθθθθ
θ +∂
∂+
∂
∂l
tt
xlm
) )13131 sinsincoscossin θθθθθ +−+
( )212121212
22
2sincoscossincoscossinsin2 θθθθθθθθ
θ−++
∂
∂+
tml
( ) 0cossin5 12
12
2
12
2 =+∂
∂+ θθ
θ
tml , (9c)
( 323232
32
2
2
2 coscossinsincos2 θθθθθ
θ +∂
∂+
∂
∂l
tt
xlm
) )23232 sinsincoscossin θθθθθ +++
( )212121212
12
2sincoscossincoscossinsin2 θθθθθθθθ
θ−++
∂
∂+
tml
( ) 0cossin 22
22
2
22
2 =+∂
∂+ θθ
θ
tml . (9d)
Solving the system of equations (9) one gets the equa-
tions of motion of the considered robot.
3.2 STABILITY ANALYSIS
Analyzing the composite system of inverted and double
chaotic pendulums one can consider the stability points
of these pendulums separately. In the case of inverted
pendulum there is only one critical point which repre-
sents dynamical equilibrium occurred when for M
033 == θθ & (see the scheme of assumed coordinate
system in Fig.2). For the double chaotic pendulum there
are four critical points (0,0), (0,P), (P,0), and (P,P), where
only first one guarantees a stable equilibrium.
Fig. 2. A scheme of assumed coordinate system
Following this, the stability conditions for the whole
investigated system can be described as follows:
( )
=
0,0,0,0,,0,,
0,0,0,0,,0,0,
0,0,0,0,,0,,0
0,0,0,0,,0,0,0
,,,,,, 321321
A
A
A
A
x
ππ
π
πθθθθθθ &&& (10)
where A stands for arbitrary parameter.
All of the coordinates are time-dependent. In practice,
the most stable critical point is the first one from (10).
Several simulations were performed in order to examine
the modeled system. In order to excite different types of
oscillation modes the initial conditions of the system
were assumed as follows: 5321 === θθθ , 0=x , and
0321 ==== x&&&& θθθ . The control variable during each
simulation had a constant value and variable sense,
depending on the angle 3θ . Exemplary results of simu-
lation are presented in Fig.3 in the form of Poincaré
sections of 33 θθ &− .

DESIGN AND TESTING OF TWO
Fig. 3. Exemplary Poincaré sections for m3 for
b) F = 12 N, c) F = 14.5 N, d) F = 15 N
OF TWO-WHEELED ROBOT WITH CHAOTIC PENDULUM
28
Fig. 3. Exemplary Poincaré sections for m3 for a) F = 8 N,
Presented Poincaré sections show a typical chaotic
behavior of a system, i.e. even small change of a force
value cause significant changes of dynamics of the
system. If the control force is too small (see Fig.3a,b),
then for a small period of time the attractors appear,
which reflect periodic oscillation of a point of location of
m3; however, finally, the observed point became oscillate
chaotically. Similarly, if F is too large (see Fig.3d), few
attractors appear. In the third case (Fig.3c) the
Poincaré section reveals an occurrence of period
doubling bifurcation which, in fact, denotes that oscill
tions of m3 are quasi-periodic. This, however, does not
mean that the behavior of the whole system is the same.
Obviously, reaching the stable equilibrium poi
system is not possible in practice, however, using appr
priate control methods the balancing stability around
the first stable point from (10) is possible.
4. BALANCING CONTROL
SIMULATION
4.1 CONCEPT OF AUTOMATIC
CONTROL SYSTEM
In order to ensure a possibility of balancing control
of the robot the automatic feedback control system
is proposed following the scheme presented in
Fig.4.
Fig. 4. A scheme of the control system:
2) motors, 3) a composite of inverted and double
pendulums, 4) accelerometer and gyroscope; signals: w(t)
input, v(t) – feedback, y(t) – output, e(t)
tion, u(t) – control signal, u*(t) –
ances.
The regulation system presented in Fig.4. works as
follows: the input signal w(t) is a value of
zero) is compared with a value of a feedback signal
i.e. the angle measured by sensors. The resulting devi
tion between these signals e(t) become an input to the
microcontroller, where, on its basis, a control signal
is generated which is responsible for the motion of
motors. The motors generate a torque which is an
excitation u*(t) that acts on the controlled system.
Various disturbances z(t), like air resistance, may infl
ence on the controlled object. An excitation causes the
change of a slope of the robot which is registered by
sensors, and which, in turn, begins the next regulation
loop.
WHEELED ROBOT WITH CHAOTIC PENDULUM
sections show a typical chaotic
behavior of a system, i.e. even small change of a force
value cause significant changes of dynamics of the
system. If the control force is too small (see Fig.3a,b),
then for a small period of time the attractors appear,
ch reflect periodic oscillation of a point of location of
; however, finally, the observed point became oscillate
is too large (see Fig.3d), few
attractors appear. In the third case (Fig.3c) the
section reveals an occurrence of period-
doubling bifurcation which, in fact, denotes that oscilla-
periodic. This, however, does not
mean that the behavior of the whole system is the same.
Obviously, reaching the stable equilibrium point for this
system is not possible in practice, however, using appro-
priate control methods the balancing stability around
the first stable point from (10) is possible.
BALANCING CONTROL
CONCEPT OF AUTOMATIC
re a possibility of balancing control
of the robot the automatic feedback control system
is proposed following the scheme presented in
Fig. 4. A scheme of the control system: 1) microcontroller,
motors, 3) a composite of inverted and double chaotic
4) accelerometer and gyroscope; signals: w(t) –
output, e(t) – regulation devia-
excitation, z(t) – disturb-
The regulation system presented in Fig.4. works as
) is a value of �3 (equaled
zero) is compared with a value of a feedback signal v(t),
i.e. the angle measured by sensors. The resulting devia-
) become an input to the
microcontroller, where, on its basis, a control signal u(t)
is generated which is responsible for the motion of
motors. The motors generate a torque which is an
) that acts on the controlled system.
), like air resistance, may influ-
ence on the controlled object. An excitation causes the
change of a slope of the robot which is registered by
sensors, and which, in turn, begins the next regulation

KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
4.2 SIMULATOR AND CONTROL
ALGORITHMS
The simulator was developed and implemented in the
Matlab®/Simulink® environment. The simulator consists
of four main blocks: controlled object, sensors
erometer and gyroscope, and a control system with three
control algorithms. The block of a contr
tionally contains a complementary filter which is used
for preconditioning of measurement signals from sensors
before using them in control algorithms. For the testing
purposes three simple control algorithms were impl
mented.
The first control algorithm was based on comparison of
the angle �3, determined by the robot subsystems, to
zero. If the measured angle is greater than zero (robot
inclined to the right), then the control signal is equal to
the constant value F, otherwise, if the measured angle is
lower than zero (robot inclined to the left), then the
control signal is equal to the constant value
case when the angle of inclination equals zero, the
control signal is zero-valued.
The second algorithm is based on a proporti
This means, that the value of a control signal, in spite of
the first algorithm, is proportional to the angle of incl
nation, i.e. if �3 P 0, then the value of the control signal is
�3·F.
The third algorithm is a slight modification of the
second one which was caused by a limited precision of
determination of an inclination angle and a fact, that
the system cannot reach static equilibrium state (see
section 3.2). Following this, the inclination angle
this algorithm is compared not to zer
small angle �. Therefore, if the measured value of
or �3 < –�, then then the value of the control signal is
�3·F, otherwise, if �3 is in <–�, �>, then the control
signal is 0.
4.3 RESULTS OF SIMULATIONS
Since the simulator is an idealized model of a considered
system, its application has several advantages and
difficulties. The main difficulty is that the conditions of
the experiment cannot be the same as assumed during
simulation studies, e.g. omitting the influence of friction
and sliding in theoretical model. However, the initial
and boundary conditions (e.g. initial values of inclin
tion angles and velocity of rotation of all limbs as well
as a value of the control signal) can be precisely set,
similarly as in the theoretical model. In order to prepare
the simulator to testing particular scenarios the sensors
need to be calibrated. The calibration is necessary in
order to reflect their realistic operation, including a
simulation of measurement errors. For this purpose a
signal prefiltering is necessary which requires calibration
KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
29
SIMULATOR AND CONTROL
The simulator was developed and implemented in the
environment. The simulator consists
of four main blocks: controlled object, sensors – accel-
erometer and gyroscope, and a control system with three
control algorithms. The block of a control system addi-
tionally contains a complementary filter which is used
for preconditioning of measurement signals from sensors
before using them in control algorithms. For the testing
purposes three simple control algorithms were imple-
ol algorithm was based on comparison of
, determined by the robot subsystems, to
zero. If the measured angle is greater than zero (robot
inclined to the right), then the control signal is equal to
measured angle is
lower than zero (robot inclined to the left), then the
control signal is equal to the constant value –F. In the
case when the angle of inclination equals zero, the
The second algorithm is based on a proportional control.
This means, that the value of a control signal, in spite of
the first algorithm, is proportional to the angle of incli-
P 0, then the value of the control signal is
The third algorithm is a slight modification of the
cond one which was caused by a limited precision of
determination of an inclination angle and a fact, that
the system cannot reach static equilibrium state (see
section 3.2). Following this, the inclination angle �3 in
this algorithm is compared not to zero, but to some
. Therefore, if the measured value of �3 > �
, then then the value of the control signal is
>, then the control
RESULTS OF SIMULATIONS
idealized model of a considered
system, its application has several advantages and
difficulties. The main difficulty is that the conditions of
the experiment cannot be the same as assumed during
simulation studies, e.g. omitting the influence of friction
nd sliding in theoretical model. However, the initial
and boundary conditions (e.g. initial values of inclina-
tion angles and velocity of rotation of all limbs as well
as a value of the control signal) can be precisely set,
odel. In order to prepare
the simulator to testing particular scenarios the sensors
need to be calibrated. The calibration is necessary in
order to reflect their realistic operation, including a
simulation of measurement errors. For this purpose a
refiltering is necessary which requires calibration
of filters. The performed calibration studies show a very
good convergence of simulated and determined signals
for both considered sensors.
In order to test the control algorithms using developed
simulator the following initial conditions were assumed:
velocity and acceleration of rotation of all limbs of
pendulum and of wheels of a robot were assumed to be
zero, while the angles of inclination were assumed as
�1 = �2 = 0°, and �3 = 10°. Before testing the
of considered algorithms were determined empirically:
• first algorithm: F = 8,
• second algorithm : F = 13,
• third algorithm: F = 13,
The results of simulation tests are presented in the form
of Poincaré sections for all limbs following the scheme
presented in Fig.1. It should be noticed that in the case
of a physical robot the Poincaré section can be obtained
only for the third limb (according to the scheme
Fig.1), since the inclination angle is observ
sensors for this limb only. For the easier interpretation
and comparison the values on axes in all presented cases
are the same. The horizontal axis represents an inclin
tion angle from the assumed zero
radians, and vertical axis represents an angular velocity
of the given limb. The results for all considered control
algorithms are presented in Figs. 5
KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
of filters. The performed calibration studies show a very
good convergence of simulated and determined signals
In order to test the control algorithms using developed
r the following initial conditions were assumed:
velocity and acceleration of rotation of all limbs of
pendulum and of wheels of a robot were assumed to be
zero, while the angles of inclination were assumed as
= 10°. Before testing the parameters
of considered algorithms were determined empirically:
= 13,
= 13, P = 1°.
The results of simulation tests are presented in the form
sections for all limbs following the scheme
presented in Fig.1. It should be noticed that in the case
of a physical robot the Poincaré section can be obtained
only for the third limb (according to the scheme –
Fig.1), since the inclination angle is observed by a set of
sensors for this limb only. For the easier interpretation
and comparison the values on axes in all presented cases
are the same. The horizontal axis represents an inclina-
tion angle from the assumed zero-positions (see Fig.2) in
vertical axis represents an angular velocity
of the given limb. The results for all considered control
algorithms are presented in Figs. 5-7, respectively.

DESIGN AND TESTING OF TWO-WHEELED ROBOT WITH CHAOTIC PENDULUM
30
Fig. 5. Poincaré sections for the first, second and third limbs,
respectively, using the first considered control algorithm
Fig. 6. Poincaré sections for the first, second and third limbs,
respectively, using the second considered control algorithm
Fig. 7. Poincaré sections for the first, second and third limbs,
respectively, using the third considered control algorithm
From the preliminary observations of the Poincaré
sections for tested control algorithms one can conclude
that the first algorithm does not allow for balancing
control of the considered system: the trajectories of
every limb diverge after certain amount of time and the
system loses its stability.
In order to compare the second and third control algo-
rithm the time realizations for a duration of 60 s from
the initial disturbance of a stability are presented in
Fig.8 and Fig.9, respectively. One can observe, both on
Poincaré sections and time realizations, that the third
algorithm increase the magnitudes of oscillations around
the stability point, however, the damping of oscillations
is better for this algorithm.

KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
Fig. 8. Variability of �3 during application of the second control
algorithm
Fig. 9. Variability of �3 during application of the
algorithm
Due to the occurrence of a chaotic motion of the consi
ered system it is also necessary to perform a simulation
when initial conditions generate chaotic motion of a
system at the beginning. For this purpose the following
initial conditions were assumed: �1 = �3
20°. The time of simulation was extended to 210
the considered case is more complex than the previous
ones. The results of simulation for all limbs are presen
ed in Fig.10.
KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
31
during application of the second control
during application of the third control
Due to the occurrence of a chaotic motion of the consid-
ered system it is also necessary to perform a simulation
when initial conditions generate chaotic motion of a
r this purpose the following
= 0°, and �2 =
20°. The time of simulation was extended to 210 s, since
the considered case is more complex than the previous
ones. The results of simulation for all limbs are present-
Fig. 10. Poincaré sections for the first, second and third limbs,
respectively, using the third considered control algorithm with
modified initial conditions
From the Poincaré sections presented in Fig.10 one can
observe that the system reveal dynamic stability at the
defined critical point. The stabilization of the system
and tending to the equilibrium can be observed on the
time realization for this case which is presented in
Fig.11. One can see that after 140 s the system is stab
lized, i.e. the magnitudes of �3 become lower; after 180 s
the system reveal low-magnitude periodic oscillations
which proves the stabilization of the system.
Fig. 11. Variability of �3 during application of the third control
algorithm with modified initial conditions
5. HARDWARE
IMPLEMENTATION
AND TESTING
5.1 CAD DESIGN AND VIRTUAL
TESTING
Irrespective of simulations in Matlab
ronment a 3D virtual model of the robot was
and simulations in V-REP virtual environment were
carried out.
In order to prepare the 3D model of the robot in V
(Fig.12) it was necessary to make models of the robot
parts using CAD software. Then, the models in
format were imported to V-REP, and revolute joints
between robot base, wheels, pendulum limbs were made.
KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
Fig. 10. Poincaré sections for the first, second and third limbs,
respectively, using the third considered control algorithm with
From the Poincaré sections presented in Fig.10 one can
veal dynamic stability at the
defined critical point. The stabilization of the system
and tending to the equilibrium can be observed on the
time realization for this case which is presented in
Fig.11. One can see that after 140 s the system is stabi-
become lower; after 180 s
magnitude periodic oscillations
which proves the stabilization of the system.
during application of the third control
algorithm with modified initial conditions
IMPLEMENTATION
CAD DESIGN AND VIRTUAL
Irrespective of simulations in Matlab®/Simulink® envi-
ronment a 3D virtual model of the robot was prepared
REP virtual environment were
In order to prepare the 3D model of the robot in V-REP
(Fig.12) it was necessary to make models of the robot
parts using CAD software. Then, the models in stl
REP, and revolute joints
between robot base, wheels, pendulum limbs were made.

DESIGN AND TESTING OF TWO-WHEELED ROBOT WITH CHAOTIC PENDULUM
32
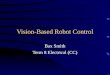
Fig. 12. Virtual 3D model of the robot in V-REP simulator
(visible red bars representing revolute joints)
Controlling of the robot movement and obtaining infor-
mation from virtual sensors were realized using a remote
API for Matlab®. As the output from simulator served
an angle of the robot base with respect to the ground
(�3), the input was the angular velocities of both wheels.
These velocities were determined using several algo-
rithms.
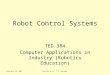
5.2 EXPERIMENTAL SETUP
Mechanical part of the real robot consists of: robot base
frame, chaotic pendulum, motors with attached wheels,
and other parts (bolts, fastenings, bearings, etc.). Final
version of the robot visible is on Fig.13. Some parts
(mainly limbs of the pendulum) of the robot have been
made using 3D printing technology.
A control system of the robot was composed using
market-available rapid control prototyping parts, i.e.:
• prototyping platform DfRobot Mega2560 (Ar-
duino Mega2560),
• motor driver Roboclaw 2×15 A,
• Inertial Measurement Unit MPU-9150,
• TTL voltage converter.
The robot was supplied using 11.1 V Li-Po batteries. To
drive the robot there were applied gearmotors
(285 RPM (4.75 s-1), 0.42 Nm) with encoders. The IMU
consisted of a 3-axis gyroscope (range up to
±2000°/sec), a 3-axis accelerometer (range up to ±16 g)
and a magnetometer. It is important to notice that this
IMU uses Digital Motion Processor™ (DMP™) in order
to process MotionFusion algorithms. DMP allows to
obtain information about orientation of the robot (an-
gles Yaw, Pitch, Roll) releasing a main control unit from
this task. It also takes an advantage of resetting meas-
urements and calibration.
Fig. 13. Experimental robot
5.3 VERIFICATION CASES
Verification tests of the control algorithms included
three cases (Fig.14). The first one was the simplest. If
the tested algorithm manages with the first case, it will
be tested for other two cases.
Case 1: The robot is placed in a stable position, then it
is released.
Case 2: The same situation as in the Case 1, but
additionally the robot is disturbed from equilibrium by
an external force.
Case 3: The same situation as in the Case 1, but
additionally the pendulum is disturbed from equilibri-
um.
Fig. 14. Three test cases
In the V-REP simulation environment and on the real
robot all the three algorithms described in section 4.2.
were tested. Additionally, fourth algorithm based on
PID control scheme was tested.
5.4 SIMULATION TESTS IN V-REP
Verification of the control algorithms included test
Cases 1 and 3, not 2, because it was impossible to apply

KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
in simulation an additional force acting on the robot.
The tests shown that only fourth algorithm is able to
control the robot. Fig.15 presents results of testi
second and third algorithms in the Case 1
Fig. 15. Results of verification of the first, second and third
algorithms for Case 1 in V-REP (blue line
motors velocity (max.1000 representing 4,75s-
It can be noted that none of these algorithms can cope
with robot oscillations. Due to this fact all these three
algorithms were not tested in the test Case 3
Analyzing results of testing the first algorithm (first plot
in Fig.15), it can be seen that direction of wheels rot
tion changes according to the sign (+/-
inclination �3. It is also important to notice, that max
KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
33
in simulation an additional force acting on the robot.
The tests shown that only fourth algorithm is able to
control the robot. Fig.15 presents results of testing first,
Case 1.
Results of verification of the first, second and third
REP (blue line - �3[°], red line – -1))
It can be noted that none of these algorithms can cope
with robot oscillations. Due to this fact all these three
Case 3.
Analyzing results of testing the first algorithm (first plot
direction of wheels rota-
-) of the angle of
. It is also important to notice, that maxi-
mum velocity of motors had to be reduced, because the
velocities changed rapidly and higher velocities caused
turnover of the robot.
Looking at Fig.15 (green rectangles on second plot), one
can see an exemplary situations when oscillations of the
pendulum remarkably influence on the robot oscillations.
Second and third plots in Fig.15 show results obtained
using proportional algorithms. An expectable situation,
when the velocity of the motors changes proportionally
to the angle of inclination �3 is observed
senting motors velocities and robot inclination almost
overlap.
Only fourth PID algorithm was able to ma
robot oscillations in Case 1, so then it was tested in
Case 3 (Fig.16).
Fig. 16. Results of verification of the fourth (PID) algorithm for
Case 1 and Case 3 in V-REP (blue line
velocity (max.1000 representing 4,75s
During the simulation the variability of
±25° and the velocity of the wheels was up to 50% of
maximum velocity. Looking at results shown on Fig.16
it is quite easy to notice that sometimes oscillations of
the pendulum intensify oscillations
sometimes suppress, which is resulted from the chaotic
nature of these oscillations.
KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
mum velocity of motors had to be reduced, because the
velocities changed rapidly and higher velocities caused
Looking at Fig.15 (green rectangles on second plot), one
can see an exemplary situations when oscillations of the
pendulum remarkably influence on the robot oscillations.
Second and third plots in Fig.15 show results obtained
nal algorithms. An expectable situation,
when the velocity of the motors changes proportionally
is observed – lines repre-
senting motors velocities and robot inclination almost
Only fourth PID algorithm was able to manage with
, so then it was tested in
Results of verification of the fourth (PID) algorithm for
REP (blue line - �3[°], red line – motors
velocity (max.1000 representing 4,75s-1))
During the simulation the variability of �3 was about
±25° and the velocity of the wheels was up to 50% of
maximum velocity. Looking at results shown on Fig.16
it is quite easy to notice that sometimes oscillations of
the pendulum intensify oscillations of the robot, but
sometimes suppress, which is resulted from the chaotic

DESIGN AND TESTING OF TWO
5.5 TESTS ON THE REAL ROBOT
Tests of the first, second and third algorithms on the
real robot were very similar to those conducted in
virtual simulation in V-REP. These algorithms were not
able to control efficiently the robot even in
consequently they were not tested for other test cases.
Fig. 17. Results of verification of the PID algorithm for cases 1,
2 and 3 (blue line - �3[°], red line – motors velocity (PWM,
max.1024 representing 4,75s-1))
The reason of such high inconsistencies between the
theoretical model presented in Sections 3 and 4, and the
real robot are backlashes of the gearboxes used in the
constructed robot, i.e. in the cases of the control alg
rithms presented in Section 4 these backlashes create so
OF TWO-WHEELED ROBOT WITH CHAOTIC PENDULUM
34
TESTS ON THE REAL ROBOT
Tests of the first, second and third algorithms on the
real robot were very similar to those conducted in
REP. These algorithms were not
able to control efficiently the robot even in Case 1, so
other test cases.
Results of verification of the PID algorithm for cases 1,
motors velocity (PWM,
The reason of such high inconsistencies between the
presented in Sections 3 and 4, and the
real robot are backlashes of the gearboxes used in the
constructed robot, i.e. in the cases of the control algo-
rithms presented in Section 4 these backlashes create so
big range of velocity values that the control val
often placed inside this range.
Results obtained for fourth PID algorithm during tests
carried out on the real robot are presented in the Fig.17.
First plot in Fig.17 shows that robot oscillates slightly
(±6°) near the equilibrium state, so the al
to sufficiently control the robot.
The second plot in Fig.17 presents behavior of the robot
controlled by PID algorithm in Case 2
the oscillation of the robot is about ±10°. A green
rectangle on the second plot indicates a
robot is pushed out from equilibrium by an external
force (to be precise – by a hand of a testing person).
One can see that the algorithm is able to easily reduce a
huge (almost 40°) deviation of regulation, and then the
robot oscillates around the equilibrium point.
WHEELED ROBOT WITH CHAOTIC PENDULUM
big range of velocity values that the control values were
Results obtained for fourth PID algorithm during tests
carried out on the real robot are presented in the Fig.17.
First plot in Fig.17 shows that robot oscillates slightly
(±6°) near the equilibrium state, so the algorithm is able
The second plot in Fig.17 presents behavior of the robot
Case 2. One can see that
the oscillation of the robot is about ±10°. A green
rectangle on the second plot indicates a situation when
robot is pushed out from equilibrium by an external
by a hand of a testing person).
One can see that the algorithm is able to easily reduce a
huge (almost 40°) deviation of regulation, and then the
ound the equilibrium point.

KAMIL FEDIO, MAKSYM KIEŁKOWSKI, ANDRZEJ KATUNIN, WAWRZYNIEC PANFIL
35
Fig. 18. Snapshots of tests of constructed robot: a) balancing on
equilibrium, b) disturbance by external force, c) oscillations of
the pendulum, d) equilibration, e) disturbance of the pendulum,
f) equilibration
The snapshots of the tests of the constructed robot
which correspond with the testing cases presented in
Fig.14 were stored in the Fig.18. The frames presented
in Fig.18 can be compared to the signals shown in
Fig.17 for all tested cases.
6. CONCLUSIONS
In the presented paper the results of theoretical model-
ling and physical implementation of the two-wheeled
balancing robot with a double chaotic pendulum were
analyzed. The control routines for the robot with vari-
ous scenarios were tested theoretically, in virtual simula-
tion environment, and on the physical model of the
robot. The mathematical model of the robot was devel-
oped by merging equations of motion of inverted pendu-
lum and double chaotic pendulum. By solving this
system of equations analytically and defining initial and
boundary conditions one achieves Poincaré sections
based on which the dynamic stability of convergence to
the equilibrium of the investigated system of pendulums
was analyzed under various scenarios. Afterwards, the
analysis in V-REP simulation software was performed.
The results of analyzes eliminates simple control algo-
rithms applied on mathematical model, since the loss of
stability was observed for the analyzed system. This can
be explained by high degree of simplification of the
mathematical model with respect to the real robot (one
axis of motion, assumption of concentrated masses,
weightless limbs, etc.). At the final stage the control
algorithms were tested on the real model of a robot. The
comparative studies show that the physical model has
even worth controllability than its virtual simulation.
Besides the mentioned problem of simplification of the
theoretical model, the backlashes were observed on the
gearboxes, which eliminates all previously applied con-
trol algorithms. By applying PID algorithm it was
possible to achieve control on motion of the robot, even
for the considered test cases, two of which assumes
throwing of balance of the robot.
The developed platform, since it reveals complex behav-
ior and very weak stability, is an outstanding physical
benchmark to test new control algorithms in future
studies. The new control algorithms for control of such
system, as well as further development of a complexity
of this system is planned in the future studies.
References
1. Sugihara T., Nakamura Y., Inoue H.: Realtime humanoid motion generation through ZMP manipulation based
on inverted pendulum control. Proc. of the IEEE International Conference on Robotics & Automation, 2002, Vol.
2, Washington D.C., p. 1404-1409.
2. Lee J.H., Shin H.J., Lee S.J., Jung S.: Balancing control of a single-wheel inverted pendulum system using air
blowers: Evolution of mechatronics capstone design. “Mechatronics” 2013, Vol. 23, p. 926-932.
3. Raffo G.V., Ortega M.G., Madero V., Rubio F.R.: Two-wheeled self-balanced pendulum workspace improvement
via underactuated robust nonlinear control. “Control Engineering Practice” 2015, Vol. 44, p. 231-242.
4. Stilman M., Olson J., Gloss W., Golem Krang: Dynamically stable humanoid robot for mobile manipulation.
Proc. of the IEEE International Conference on Robotics & Automation, Anchorage, AK, 2010, p. 3304-3309.
5. Li Z., Yang C.: Neural-adaptive output feedback control of a class of transportation vehicles based on wheeled
inverted pendulum models., “IEEE Transactions on Control Systems Technology” 2012, Vol. 20, p. 1583-1591.
6. Spong M.W., Corke P., Lozano R.: Nonlinear control of the inertia wheel pendulum. “Automatica” 2001, Vol. 37,
p. 1845-1851.
7. Pathak K., Franch J., Agrawal S.K.: Velocity and position control of a wheeled inverted pendulum by partial
feedback linearization “IEEE Transactions on Robotics” 2005, Vol. 21, p. 505-513.
8. Jung S., Cho H.T., Hsia T.C.: Neural network control for position tracking of a two-axis inverted pendulum
system: Experimental studies. “IEEE Transactions on Neural Networks” 2007, Vol. 18, p. 1042-1048.

DESIGN AND TESTING OF TWO
9. Yamakawa T.: Stabilization of an inverted pendulum by a high
“Fuzzy Sets and Systems” 1989, Vol. 32,
10. Jung S., Kim S.S.: Control experiment of a wheel
Transactions on Control Systems Technology” 2008
11. Li J., Gao X., Huang Q., Du Q., Duan X.
pendulum mobile robot. Proc. of the IEEE Conference on
12. Ren T.J., Chen T.C., Chen C.J.: Motion control for a two
“Control Engineering Practice” 2008
13. Chiu C.H.: The design and implementation of a wheeled inverted pendulum using an adaptive output recurrent
cerebellar model articulation controller
1822.
14. Srinivasan B., Huguenin P., Bonvin D.
experimental verification. “Automatica
15. Yi J., Yubazaki N., Hirota K.: A new fuzzy controller for stabilization of a parallel
lum system. “Fuzzy Sets and Systems” 2002
16. Furut K., Ochiai T., Ono N.: Attitude contro
1984, Vol. 39, p. 1351-1365.
17. Cheng F., Zhong G., Ji Y., Xu Z.:Fuzzy control of a double
Vol. 79, p. 315-321.
18. Zhong W., Röck H.: Energy and passivity based control of the dou
IEEE Conference on Control Applications
19. Li H., Zhihong M., Jiayin W.: Variable universe adaptive fuzzy control on the quadruple inverted pendu
“Science China Technological Sciences” 2002
20. Li H., Wang J., Feng Y., Gu Y.:
motor. “Progress in Natural Science” 2004
21. Awrejcewicz J., Kudra G., Wasilewski G.
triple physical pendulum. “Nonlinear Dynamics” 2007
22. Awrejcewicz J., Supeł B., Lamarque C.H., Kudra G., Wasilewski G., Olejnik P.
study of regular and chaotic motion of triple physical pendulum,
os” 2008, Vol. 18, p. 2883-2915.
23. Awrejcewicz J., Krysko A.V., Papkova I.V., Krysko V.A.
Part 3: The Lyapunov exponents, hyper, hyper
2012, Vol. 45, p. 721-736.
24. Lavien R.B., Tan S.M.: Double pendulum: an experiment in chaos
p. 1038-1044.
25. Zhou Z., Whiteman C.: Motions of double pendulum
26. Yu P., Bi Q.: Analysis of nonlinear dynamics
Vibrations” 1998, Vol. 217, p. 691-736.
27. Katunin A., Fedio K., Gawron V., Serzysko K.
dynamiki dwuczłonowego wahadła chaotycznego
28. Wang R., Jing Z.: Chaos control of chaotic pendulum systems
201-207.
29. Christini D.J., Collins J.J., Linsay P.S.
pendulum. “Physical Review E” 1996
30. Alasty A., Salarieh H.: Nonlinear feedback control of chaotic pendulum in presence of saturation effect
Solitons and Fractals” 2007, Vol. 31,
31. de Korte R.J., Schouten J.C., van den Bleek C.M.
dynamics using delay coordinates. “
32. Guan Z.H., Chen G., Ueta T.: On impulsive control of a periodically
Transactions on Automatic Control
33. Awrejcewicz J., Wasilewski G., Kudra G., Reshmin S.A.
using feedback control. “Journal of Computer and S
Ten artykuł dostępny jest na licencji Creative Commons Uznanie autorstwa 3.0 Polska.
Pewne prawa zastrzeżone na rzecz autorów.
Treść licencji jest dostępna na stronie
OF TWO-WHEELED ROBOT WITH CHAOTIC PENDULUM
36
Stabilization of an inverted pendulum by a high-speed fuzzy logic controller hardware system
ol. 32, p. 161-180.
Control experiment of a wheel-driven mobile inverted pendulum using neural net
ol Systems Technology” 2008, Vol. 16, p. 297-303.
Li J., Gao X., Huang Q., Du Q., Duan X.: Mechanical design and dynamic modeling of a two
of the IEEE Conference on Automation & Logistics, Jinian, 2007,
Motion control for a two-wheeled vehicle using a self
“Control Engineering Practice” 2008, Vol. 16, p. 365-375.
The design and implementation of a wheeled inverted pendulum using an adaptive output recurrent
cerebellar model articulation controller. “IEEE Transactions on Industrial Electronics” 2010
Srinivasan B., Huguenin P., Bonvin D.: Global stabilization of an inverted pendulum
Automatica” 2009, Vol. 45, p. 265-269.
A new fuzzy controller for stabilization of a parallel-type double inverted pend
s and Systems” 2002, Vol. 126, p. 105-119.
Attitude control of a triple inverted pendulum. “International Journal of
Fuzzy control of a double-inverted pendulum. “Fuzzy Set
Energy and passivity based control of the double inverted pendulum on a cart
lications, Mexico City, 2001, p. 896-901.
Variable universe adaptive fuzzy control on the quadruple inverted pendu
“Science China Technological Sciences” 2002, Vol. 45, p. 213-224.
Hardware implementation of the quadruple inverted
ural Science” 2004, Vol. 14, p. 822-827.
Awrejcewicz J., Kudra G., Wasilewski G.: Experimental and numerical investigation of chaotic regions
“Nonlinear Dynamics” 2007, Vol. 50, p. 755-766.
Awrejcewicz J., Supeł B., Lamarque C.H., Kudra G., Wasilewski G., Olejnik P.: Numerical and experimental
study of regular and chaotic motion of triple physical pendulum, “International Journal of Bifurcation and
Awrejcewicz J., Krysko A.V., Papkova I.V., Krysko V.A.: Routes to chaos in continuous mechanical systems.
Part 3: The Lyapunov exponents, hyper, hyper-hyper and spatial-temporal chaos. “Chaos
endulum: an experiment in chaos. “American Journal of Physics” 1993
Motions of double pendulum. “Nonliear Analysis” 1996, Vol. 26, p.
Analysis of nonlinear dynamics and bifurcations of a double pendulum.
736.
Katunin A., Fedio K., Gawron V., Serzysko K.: Propozycja konstrukcji i sposobu badań eksperymentalnych
dynamiki dwuczłonowego wahadła chaotycznego. “Aparatura Badawcza i Dydaktyczna” 2014,
rol of chaotic pendulum systems. “Chaos, Solitons and Fract
Christini D.J., Collins J.J., Linsay P.S.: Experimental control of high-dimensional chaos:
” 1996, Vol. 54, p. 4824-4827.
Nonlinear feedback control of chaotic pendulum in presence of saturation effect
ol. 31, p. 292-304.
Korte R.J., Schouten J.C., van den Bleek C.M.: Experimental control of chaotic pendulum with unknown
“Physical Review E” 1995, Vol. 52, p. 3358-3365.
On impulsive control of a periodically forced chaotic pendulum system
Control” 2000, Vol. 45, p. 1724-1727.
Awrejcewicz J., Wasilewski G., Kudra G., Reshmin S.A.: An experiment with swinging up a double pendulum
ournal of Computer and Systems Sciences International” 2012, V
Ten artykuł dostępny jest na licencji Creative Commons Uznanie autorstwa 3.0 Polska.
Pewne prawa zastrzeżone na rzecz autorów.
Treść licencji jest dostępna na stronie http://creativecommons.org/licenses/by/3.0/pl/
WHEELED ROBOT WITH CHAOTIC PENDULUM
ogic controller hardware system.
mobile inverted pendulum using neural network. “IEEE
Mechanical design and dynamic modeling of a two-wheeled inverted
Automation & Logistics, Jinian, 2007, p. 1614-1619.
ng a self-tuning PID controller.
The design and implementation of a wheeled inverted pendulum using an adaptive output recurrent
ustrial Electronics” 2010, Vol. 57, p. 1814-
Global stabilization of an inverted pendulum – control strategy and
type double inverted pendu-
“International Journal of Control”
Fuzzy Sets and Systems” 1996,
ble inverted pendulum on a cart. Proc. of the
Variable universe adaptive fuzzy control on the quadruple inverted pendulum.
Hardware implementation of the quadruple inverted pendulum with single
Experimental and numerical investigation of chaotic regions in the
Numerical and experimental
ournal of Bifurcation and Cha-
Routes to chaos in continuous mechanical systems.
Chaos, Solitons and Fractals”
ournal of Physics” 1993, Vol. 61,
p. 1177-1191.
“Journal of Sound and
Propozycja konstrukcji i sposobu badań eksperymentalnych
Aparatura Badawcza i Dydaktyczna” 2014, vol. 19, s. 53-59.
Fractals” 2004, Vol. 21, p.
ional chaos: the driven double
Nonlinear feedback control of chaotic pendulum in presence of saturation effect. “Chaos,
Experimental control of chaotic pendulum with unknown
forced chaotic pendulum system. “IEEE
An experiment with swinging up a double pendulum
Vol. 51, p. 176-182.
Ten artykuł dostępny jest na licencji Creative Commons Uznanie autorstwa 3.0 Polska.
http://creativecommons.org/licenses/by/3.0/pl/