Embed Size (px)
Citation preview

Design, Analysis, and Testing of the NorSat-3 Microsatellite MissionCommunications Subsystem
by
Massimo Andrea Mancini
A thesis submitted in conformity with the requirementsfor the degree of Master of Applied Science
Institute for Aerospace StudiesUniversity of Toronto
c© Copyright 2018 by Massimo Andrea Mancini

Abstract
Design, Analysis, and Testing of the NorSat-3 Microsatellite Mission Communications
Subsystem
Massimo Andrea Mancini
Master of Applied Science
Graduate Department of Institute for Aerospace Studies
University of Toronto
2018
The NorSat-3 microsatellite will use a combination of Automatic Identification System data and
civilian navigation radar to track cooperative and non-cooperative maritime targets. NorSat-
3 leverages a Space Flight Laboratory designed and built spacecraft bus, and extends the
performance provided by the communications subsystem offered on previous missions. A design
for the communications subsystem is proposed which maximizes the use of heritage components,
consisting of an uplink system, high speed uplink system, and downlink system. Spacecraft
antennas are positioned to optimize performance for all payload and bus antennas during the
navigation radar detector payload operations. Analyses and testing performed on this design
prove that the links meet requirements on link margin, data throughput, gain coverage, and
incident power. The implementation of this design on NorSat-3 will demonstrate the capabilities
of microsatellites and improve upon the spacecraft bus design.
ii

Acknowledgements
I would like to thank my supervisor Dr. Robert Zee for first accepting me into the Master
of Applied Science program at the Space Flight Laboratory (SFL), and for then providing me
with invaluable feedback on course and thesis work. Your input has made me improve as a
systems engineer, and will be in my mind throughout my career. I am continually amazed to
be a part of the lab you have created, and hope to contribute to the work that will come out
of this lab in the years to come.
I have been fortunate enough to work with many of the managers at SFL, who have provided
me with guidance and support through my work. In particular I thank Bradley Cotten, who
has been extraordinarily helpful and patient, assigning me the work that has culminated in this
thesis.
Aside from my supervisor and managers, I have also had the opportunity to collaborate with
some of the communications engineers at SFL. Ian Bennett and Clement Ma have provided vital
mentorship, always willing to assist me and answer my unending questions.
The students I started my time at SFL with have made this experience even more enjoyable;
Nate, Rob, Suraj, Nick, Starla, Braden (a.k.a Tuna Brad), and Andreas, you were the best
group I could have hoped for during our microsatellite design courses. I count myself lucky to
be among you, and I wish you all the best in your future endeavours. I’ll see you all at the
GRASP launch!
I would like to thank Nick, Tony, Kevin, Drew, and MK from my days at Ryerson for
showing me that it’s a good thing to take a break from studying every once in a while. You
guys helped me make it through my undergraduate degree, and I look forward to the fun we’ll
have in the future.
Most importantly, I thank my family. I thank all of my grandparents, Romeo and Alfonsa,
and Leonardo and Rosa, for moving to Canada and working hard to build a life for my parents.
I thank my parents Renato and Emilie for raising me, providing for me, and supporting me.
You have always pushed me to do better, and you are in no small part responsible for all of the
things I have accomplished. I can never thank you enough for all that you have done for me.
Leandra, Tiziana, and Sabrina, even though you drive me crazy, you are all in my top three
favourite sisters list (just kidding, you guys are great; thanks for being awesome).
iii

Contents
Acknowledgements iii
Table of Contents iv
List of Tables vii
List of Figures ix
List of Acronyms xi
1 Introduction 1
1.1 Small Satellites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Maritime Ship Monitoring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 AISSat Missions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.4 NorSat Missions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5 NorSat-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.6 Thesis Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Satellite Communications 6
2.1 The Decibel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Antennas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 Polarization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.2.2 Free Space Loss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.3 Isolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 Signal Modulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4 Transmitters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4.1 Power Flux Density . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5 Receivers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5.1 Noise Factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5.2 Thermal Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5.3 Bit Error Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.6 Networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
iv

2.7 Power Dividers and Power Combiners . . . . . . . . . . . . . . . . . . . . . . . . 14
2.8 Filters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.9 Frequency Converters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.10 Communication Links . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.10.1 Data Throughput . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.10.2 Coherent and Noncoherent Modulation . . . . . . . . . . . . . . . . . . . 17
2.11 Communications Subsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Communications Subsystem Design 18
3.1 Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 High Level Design Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3 Uplink System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3.1 Ultra High Frequency Receiver . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3.2 Down Converter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3.3 Band Pass Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.3.4 Combiner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 High Speed Uplink System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4.1 High Speed S-Band Receiver . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.5 Downlink System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.5.1 S-band Transmitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.5.2 Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Link Budgets 29
4.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.1 Transmitting Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.2 Signal Path . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1.3 Receive Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1.4 Signal Modulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.1.5 Link Margin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2 Uplink Budget . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3 High Speed Uplink Budget . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.4 Power Flux Density . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.5 Downlink Budget . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.6 Requirement Verification Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5 Bus Antenna Considerations 41
5.1 Bus Antenna Positioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.2 Simulated Bus Antenna Performance . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.2.1 Uplink Antennas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2.2 High Speed Uplink Antenna . . . . . . . . . . . . . . . . . . . . . . . . . . 49
v

5.2.3 Downlink Antennas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.3 Detailed Data Throughput Analysis . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.4 Requirement Verification Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6 Payload Antenna Considerations 57
6.1 Very High Frequency Payload Antenna Positioning . . . . . . . . . . . . . . . . . 57
6.1.1 Design Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6.1.2 Modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6.1.3 Design Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.1.4 Design Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.2 Downlink and Navigation Radar Detector Coupling . . . . . . . . . . . . . . . . . 62
6.2.1 Generated Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
6.2.2 Blocking Levels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.3 Downlink and Automatic Identification System Receiver Coupling . . . . . . . . 64
6.3.1 Generated Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.3.2 Incident Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.3.3 Blocking Levels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.4 Filter Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
7 Antenna Testing 69
7.1 Antenna Pattern Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7.1.1 Test Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7.1.2 Reference Antenna Correction Factors . . . . . . . . . . . . . . . . . . . . 71
7.1.3 Antenna Measurement Data Processing . . . . . . . . . . . . . . . . . . . 73
7.1.4 NorSat-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7.2 Isolation Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.2.1 Test Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
7.2.2 Isolation Measurement Data Processing . . . . . . . . . . . . . . . . . . . 79
7.2.3 NorSat-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
8 Requirement Compliance Table 83
9 Conclusions 88
References 89
vi

List of Tables
2.1 Polarization loss for various antenna combinations . . . . . . . . . . . . . . . . . 9
3.1 Communication subsystem requirements . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Requirements affecting the communications subsystem design . . . . . . . . . . . 20
4.1 Link budget requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2 Uplink budget for Vardø ground station . . . . . . . . . . . . . . . . . . . . . . . 34
4.3 High speed uplink budget for Vardø ground station . . . . . . . . . . . . . . . . . 36
4.4 Power flux density margins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.5 Downlink budget for Vardø ground station . . . . . . . . . . . . . . . . . . . . . . 39
4.6 Link budget requirements verification matrix . . . . . . . . . . . . . . . . . . . . 40
5.1 Bus antenna requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.2 Data throughput analysis for downlink antennas in various configurations . . . . 46
5.3 Data throughput analysis for the uplink system . . . . . . . . . . . . . . . . . . . 46
5.4 Data throughput analysis for the high speed uplink system . . . . . . . . . . . . 46
5.5 NorSat-3 data throughput analysis parameters . . . . . . . . . . . . . . . . . . . 54
5.6 Realistic downlink data throughput . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.7 Realistic uplink data throughput . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.8 Realistic high speed uplink data throughput . . . . . . . . . . . . . . . . . . . . . 55
5.9 Bus antenna requirements verification matrix . . . . . . . . . . . . . . . . . . . . 56
6.1 AIS antenna requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6.2 Simulated AIS antenna performance results . . . . . . . . . . . . . . . . . . . . . 61
6.3 AIS antenna positioning requirements verification matrix . . . . . . . . . . . . . 63
6.4 Downlink to NRD coupling requirements . . . . . . . . . . . . . . . . . . . . . . . 64
6.5 Downlink to NRD coupling requirements verification matrix . . . . . . . . . . . . 64
6.6 Downlink to AIS receiver coupling requirements . . . . . . . . . . . . . . . . . . . 65
6.7 AIS receiver electromagnetic compatibility specifications . . . . . . . . . . . . . . 65
6.8 Downlink to AIS receiver coupling requirements verification matrix . . . . . . . . 68
7.1 Antenna pattern requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
7.2 Antenna pattern requirements verification matrix . . . . . . . . . . . . . . . . . . 78
vii

7.3 Isolation test requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
7.4 Simulated isolation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
8.1 Communications subsystem requirements verification matrix . . . . . . . . . . . . 85
viii

List of Figures
2.1 Example antenna pattern of a horn antenna . . . . . . . . . . . . . . . . . . . . . 7
2.2 Antenna polarization types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Axial ratios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4 BER versus Eb/N0 for various modulation schemes . . . . . . . . . . . . . . . . . 13
2.5 (a) Power divider; (b) Power combiner . . . . . . . . . . . . . . . . . . . . . . . . 14
2.6 Example block diagram of a basic heterodyne . . . . . . . . . . . . . . . . . . . . 15
2.7 Communication link directions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Block diagram of the uplink subsystem . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Block diagram of the SFL UHF receiver . . . . . . . . . . . . . . . . . . . . . . . 23
3.3 Block diagram of the down converter . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 Block diagram of the high speed uplink system . . . . . . . . . . . . . . . . . . . 25
3.5 Block diagram of the high speed S-band receiver . . . . . . . . . . . . . . . . . . 26
3.6 Block diagram of the downlink system . . . . . . . . . . . . . . . . . . . . . . . . 27
3.7 Block diagram of the SFL S-band transmitter . . . . . . . . . . . . . . . . . . . . 28
5.1 Example of the SFL S-band patch antenna . . . . . . . . . . . . . . . . . . . . . 42
5.2 The external layout of NorSat-3 used for antenna simulations . . . . . . . . . . . 43
5.3 The target area for gathering navigation radar data with NorSat-3 . . . . . . . . 44
5.4 The attitude NorSat-3 will be in while gathering navigation radar data . . . . . . 44
5.5 The S-band patch antennas mounted on NorSat-3 . . . . . . . . . . . . . . . . . . 47
5.6 Uplink system S-band patch antenna array RHCP gain . . . . . . . . . . . . . . 48
5.7 Spherical coverage at various gain thresholds for the uplink system S-band patch
antenna array RHCP gain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.8 Uplink antenna array input return losses and isolation over the uplink frequency
range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.9 High speed uplink system S-band patch antenna RHCP gain . . . . . . . . . . . 50
5.10 High speed uplink antenna input return loss and isolation over the high speed
uplink frequency range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.11 Downlink system S-band patch antenna array RHCP gain . . . . . . . . . . . . . 51
ix

5.12 Spherical coverage at various gain thresholds for the downlink system S-band
patch antenna array RHCP gain . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.13 Downlink antenna array input return losses and isolation over the downlink fre-
quency range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6.1 AIS antenna configuration A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.2 AIS antenna configuration B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
6.3 AIS antenna configuration C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6.4 Combined spherical gain coverage for various antenna configurations . . . . . . . 62
6.5 S-band transmitter output over the AIS frequency range . . . . . . . . . . . . . . 65
6.6 Simulated isolation between the AIS antennas and the S-band downlink antennas
over the AIS frequency range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6.7 Simulated isolation between the AIS antennas and the S-band downlink antennas
over the downlink frequency range . . . . . . . . . . . . . . . . . . . . . . . . . . 67
7.1 Spherical coordinates used for the antenna under test . . . . . . . . . . . . . . . 70
7.2 Finding the antenna pattern of an antenna . . . . . . . . . . . . . . . . . . . . . 71
7.3 Measuring the system cable loss of the test set-up . . . . . . . . . . . . . . . . . . 72
7.4 Reference antenna gain for the antenna pattern test . . . . . . . . . . . . . . . . 73
7.5 Simulated RHCP antenna pattern of the previous mission’s intersatellite link
antenna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.6 Measured RHCP antenna pattern of the previous mission’s intersatellite link
antenna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.7 Simulated RHCP antenna pattern of the previous mission’s S-band downlink
antenna array . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7.8 Measured RHCP antenna pattern of the previous mission’s S-band downlink
antenna array . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7.9 Isolation test set-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
7.10 Previous mission’s S-band downlink to intersatellite link isolation, and S-band
downlink to S-band uplink isolation over the S-band downlink frequency range . 82
7.11 Previous mission’s S-band downlink to AIS antenna isolation over the AIS fre-
quency range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
x

List of Acronyms
AIS Automatic Identification System
BER Bit Error Rate
BPSK Binary Phase Shift Keying
C/N Carrier-to-Noise-Ratio
C/N0 Carrier-to-Noise-Density-Ratio
Eb/N0 Bit-Energy-to-Noise-Density-Ratio
EIRP Equivalent Isotropically Radiated Power
FPGA Field-Programmable Gate Array
G/T Gain-to-Noise-Temperature-Ratio
GFSK Gaussian Frequency Shift Keying
GPS Global Positioning System
HDLC High-level Data Link Control
HFSS High Frequency Structure Simulator
HPA High Power Amplifier
ITU International Telecommunications Union
LHCP Left Hand Circular Polarization
LNA Low Noise Amplifier
NRD Navigation Radar Detector
NTS Nanosatellite Tracking of Ships
PFD Power Flux Density
QPSK Quadrature Phase Shift Keying
RF Radio Frequency
RHCP Right Hand Circular Polarization
SFL Space Flight Laboratory
SNR Signal-to-Noise Ratio
STK Systems Toolkit
UHF Ultra High Frequency
VHF Very High Frequency
VNA Vector Network Analyser
XPOD eXoadaptable PyrOless Deployer
xi

Chapter 1
Introduction
1.1 Small Satellites
Satellites provide a means of completing certain tasks with unparalleled performance. Typi-
cally these objectives are completed with satellites that are massive and complicated, featuring
many redundant systems. These missions are expensive due to the launch costs associated
with injecting high mass objects into orbit, as well as the time and engineering spent creating
these satellites. Recent years have shown that microsatellites and nanosatellites are capable of
completing missions previously thought to require large satellites, such as Earth monitoring,
astronomy, communications relaying, and remote sensing. These small satellites are designed to
be simple and robust, opting for high performance, reliable commercially available components
rather than specialized components. Small satellites are driven by the microspace philosophy
design approach, which focuses on the use of rigorous testing and prototyping, short develop-
ment cycles, small engineering teams, and clear objectives [1]. This design approach reduces the
total time spent designing and building these satellites to months or years, rather than decades.
Their size allows small satellites to be included as secondary payloads on launch vehicles, re-
ducing launch costs and therefore the overall mission cost. The low cost and fast turn-around
times involved make micro and nanosatellites particularly useful for technology demonstration
and experimental missions.
1.2 Maritime Ship Monitoring
One example of an industry in which small satellites are beginning to see frequent use is maritime
ship monitoring with the Automatic Identification System (AIS). AIS was established by the
International Maritime Organization through the Safety Of Life At Sea conventions, and is
used for maritime ship tracking and monitoring by authorities, and for collision avoidance by
ships [2]. It is a mandatory system for ships with greater than 300 gross tonnage and all
passenger vehicles regardless of size, and is used to identify the ship name, transmission time,
maritime mobile service identity, heading, speed, latitude, and longitude [2]. AIS equipment
1

Chapter 1. Introduction 2
automatically transmits this information to all nearby ships and monitoring authorities at time
intervals which depend on the speed of the ship; ships which are motionless transmit information
much less frequently than ships which are in motion.
The communication range for AIS can be very limited, as AIS data is broadcast over Very
High Frequency (VHF) signals and therefore requires line-of-sight for transmission. According
to an analysis completed in [3], the range for ship-to-ship communication is typically 37 km,
and the ship-to-shore range can be 75-100 km. The concept study in [3] for using space-based
AIS receivers concluded that satellites can provide a view of a circle with a radius of over 1850
km, allowing for the reception of signals over a much larger area. The large coverage area
increases the amount of ships detected, which can saturate the AIS bands in high traffic areas;
this can be mitigated by reducing the coverage area, operating in an area without exceedingly
busy ship traffic, or improving ship detection algorithms [3].
The first satellite to attempt to characterize maritime ship traffic was the Nanosatellite
Tracking of Ships (NTS). The satellite was designed and built by Space Flight Laboratory
(SFL) in just six months (October 2007 - March 2008) and was launched on April 28, 2008,
carrying an AIS receiver developed by COM DEV Ltd. to exhibit the receiver’s ability to detect
and decode AIS data [4]. Although NTS was intended to be a demonstration mission, it’s success
quickly drew requests from companies and governments to provide specific observations.
Interest in AIS data from the Norwegian Coastal Administration, the Norwegian Coast
Guard, and the Norwegian Directorate of Fisheries led to the development of Norway’s first AIS
space receiver, the NORAIS-1 receiver. The Norwegian Defence Research Establishment and
Kongsberg Seatex designed the receiver, which was first flown on the International Space Station
in April 2010 and began operations on June 1st [5]. NORAIS-1 was also flown on AISSat-1 in
July 2010 and AISSat-2 in July 2014, satellites designed and built by SFL. This receiver collected
AIS data by sampling the AIS channels and decoding the AIS messages, and also measured the
VHF signal environment [6]. During it’s years of operation on the International Space Station,
AISSat-1, and AISSat-2, the individual NORAIS-1 receivers tracked about 26,000 ships per
day; several new algorithms were uploaded to the receivers to improve performance throughout
their lives, however the hardware implemented on the receiver was not able to combine these
improvements into a single algorithm [6]. This lead to the development of a second generation
receiver, the NORAIS-2 receiver, which contained more capable hardware that was able to run
a more advanced algorithm, as well as accepting data from all four AIS channels simultaneously.
The NORAIS-2 receiver was installed on the International Space Station in February 2015,
tracking 33,000 ships per day, while also tracking many more ships in high traffic areas [6].
Kongsberg Seatex, with support from the European Space Agency, has improved on their
design of the AIS space receiver even further with the most recent iteration, the ASR x50. This
receiver has flown on the NorSat-1 and NorSat-2 satellites, detecting 40,000 ships per day and
performing extremely well in high traffic areas [7].
Gathering AIS data has provided valuable information on the movement of ships, however

Chapter 1. Introduction 3
this information can be improved. AIS transceivers can be manually switched off, or may be
manipulated to provide incorrect information, both of which are illegal actions. There is no
way of determining if the AIS data gathered is incorrect using AIS alone unless the data is
showing information that is obviously incorrect, such as a ship on a land mass. The only way
to verify the accuracy of the AIS data is to compare the data against data from other sensors.
Proposed sensors include synthetic aperture radar, active and/or passive maritime and coastal
radar, infrared sensors, and optical sensors [8]. Fusing information from an AIS receiver with
sensors capable of locating objects in a field of view can identify ships that are performing acts
such as broadcasting false AIS data, turning off AIS transmitters, illegal fishing, trafficking,
and piracy. This information is of use to coastal authorities and governing bodies, who will be
able to act on this information and reduce illegal activities in monitored areas.
Passive radar uses electromagnetic waves from other sources to identify objects, and there-
fore only requires a receiver, which is an attractive option for satellites due to limitations on
power consumption. The transmitter for this form of radar can be either passive coherent
location radar, where a separate device which broadcasts information that is not intended to
be used for radar (an illuminator of opportunity) provides the transmitted signal, or parasitic
radar, in which the object being tracked provides the transmitted signal. The performance
of passive coherent location radar depends heavily on the geometry of the problem, which is
highly variable, and the implementation is quite complex [9]. Parasitic radar operates is a much
simpler method of tracking an object, although it requires the object to be transmitting a signal
of some sort.
1.3 AISSat Missions
Norway’s first AIS satellite, AISSat-1, was designed and built by the SFL for the government
of Norway, and carried the NORAIS-1 receiver. Following the success of the AISSat-1, the
government of Norway ordered a second satellite to increase the capability of gathering AIS
data. SFL provided AISSat-2, an almost identical satellite with minor improvements, and
together AISSat-1 and AISSat-2 have been operating since their launch, collecting valuable
AIS data and providing information on the movement of thousands of ships daily. The data
generated by the satellites is of particular use when the satellites are observing the same area,
as this increases the total number of ships tracked in the area. A third version of the satellite,
AISSat-3, was provided by SFL, however a launch failure resulted in the loss of the satellite.
The three AISSat satellites use the GRYPHON bus developed by the SFL. This platform is
developed for nanosatellites that are 20 x 20 x 20 cm, and uses components that are designed
and built by SFL. The 10 SFL satellites which use the GRYPHON platform on-orbit performed
or continue to perform with unparalleled conduct for satellites of their size. The GRYPHON
bus has a mass of 7 kg, 2 kg of which is reserved for the payload, and can provide 3 to 4 W
of power to the payload at a duty cycle of 100%; the GRYPHON bus also offers a cold gas

Chapter 1. Introduction 4
propulsion system [10].
1.4 NorSat Missions
Following the success of the AISSat missions, the Norwegian government contracted two more
satellites, NorSat-1 and NorSat-2. NorSat-1 contains three science payloads; an AIS receiver, a
Langmuir probe instrument to measure plasma in the atmosphere, and a radiometer to measure
total solar irradiance [11]. NorSat-2 contains two payloads; an AIS receiver, and a VHF data
exchange payload [12]. These microsatellites were launched in July 2017, and as mentioned
previously, have been tracking 40,000 ships per day with the ASR x50.
The NorSat satellites use the SFL developed NEMO platform, which is based upon the
GRYPHON platform, and extends the capabilities offered by microsatellites. Components
from the GRYPHON platform are used on the NEMO platform where possible to leverage the
extensive flight heritage of the GRYPHON satellites. The NEMO bus, measuring 20 x 30 x
40 cm has been qualified for satellites of 15 kg, 6 kg of which is reserved for payload mass;
the larger size of the NEMO bus allows higher power generation than the GRYPHON bus,
providing a minimum of 45 W of power at a duty cycle of 40% to the payload, and allowing
the use of monopropulsion, cold gas, or resistojet propulsion [10].
1.5 NorSat-3
The NorSat-3 mission will use an AIS receiver and a second sensor to gather data on the
activities of ships in a target area of interest. As all ships are required to have 9 GHz X-
band navigation radar installed according to the same Safety Of Life At Sea conventions which
established the AIS requirements [2], tracking civilian ship navigation radar passively becomes
a clear choice for identifying non-cooperative ships. It is possible that ships will turn off their
navigation radar, however as it is an aid which prevents collisions and assists in the operation
of the ship, navigation radar is much less likely to be turned off than AIS. The AIS data
gathered by NorSat-3 can be identified as correct or incorrect by supplementing the data with
the navigation radar readings. The Norwegian Defence Research Establishment and Kongsberg
Seatex have collaborated to design the Navigation Radar Detector (NRD), a high-performance
receiver which will be flown for the first time as the second payload on NorSat-3. Any ships
that are either broadcasting incorrect AIS data or no AIS would be located by the NRD,
and are points of interest for Norwegian coastal authorities. NorSat-3 will be able to find
non-cooperative targets in regions of interest to the Norwegian Coastal Administration, thus
demonstrating the validity of using a combination of AIS and NRD data to track ships, as well
as the NRD technology.
NorSat-3 has different requirements, constraints and conditions than previous missions,
therefore a new satellite that can complete the particular mission must be designed. Although

Chapter 1. Introduction 5
the use of established platforms simplifies the design process, and designs from previous SFL
satellites can be used to leverage flight heritage and to reduce the amount of engineering needed,
there is still a great deal of effort required to verify that the new satellite will meet requirements.
This extends to all subsystems involved in the satellite, although some subsystems will require
far fewer changes than others. The communications subsystem is one which requires a large
amount of design and analysis, as the conditions used to design communications subsystems
vary greatly between missions due to the different operational requirements.
Radio communication has experienced rapid growth and astonishing improvement over the
last century; transmitters and receivers have reduced in size, increased in efficiency, and in-
creased in performance [13]. This has extended to the space industry, where radio or optical
communication remain the only methods of communicating with a spacecraft. Optical commu-
nication is at this point still in its infancy, having very little on-orbit performance, although
there is a great deal of potential for the technology [14]; radio technology has improved to the
point that microsatellites and nanosatellites can be equipped with reliable, high output power
transmitters and sensitive receivers. It is unavoidable to have transmit antennas and receive
antennas in close proximity to one another on satellites of these sizes, which can be problem-
atic when the systems involved have high power transmitters and sensitive receivers. This also
extends to payloads on the spacecraft, which must not be damaged by or cause damage to
the spacecraft avionics. Thus the communications subsystem of microsatellites and nanosatel-
lites are designed with great care to ensure that operational requirements are achieved without
risking the integrity or performance of any devices. NorSat-3 requires this level of analysis, de-
sign, and testing for the communications subsystem to verify that it can satisfy unique mission
requirements.
1.6 Thesis Objectives
An initial design of the communications subsystem for NorSat-3 that meets high level level
requirements will be reached via a bottom-up, top-down approach following the microspace
philosophy. This design will undergo various analyses and iterative improvements until all
relevant requirements can be met, after which testing will be completed to verify the compliance
of the design. The final design must be a robust communications subsystem which will operate
under a wide range of conditions, and will assist and enhance the operation of the payloads.
This thesis will document the design process completed for the communications subsystem of
NorSat-3, including design completed at the system level and subsystem level to accommodate
proposed changes. The design of the communications subsystem will be validated though
extensive analysis and testing to capture all aspects of the design. The final product will be
a high performance system which meets all relevant requirements and will enable NorSat-3 to
complete it’s mission objectives.

Chapter 2
Satellite Communications
Information can be transported between objects via an electromagnetic wave propagating
through a medium. In many applications, this medium is a transmission line such as a wire or
cable which requires a physical connection between the two objects. However, it is not always
possible or simple to have two objects tethered in such a manner; in these cases it becomes
necessary to propagate these waves through a different medium, such as air or vacuum. Rather
than using a physical connection between these points, this information is broadcast with an
object known as an antenna, and received by another antenna. Antennas are items which are
capable of radiating or receiving electromagnetic waves [15]. Often information must be broad-
cast in a different format than it is created in, requiring components to convert the data into
a format that may be sent, and to convert this signal back into one which can be understood.
The devices which accomplish this are transmitters and receivers respectively, thus information
exchange can be discussed in terms of transmitting and receiving.
2.1 The Decibel
No foray into communications can proceed without a knowledge of decibels, the foremost tool in
a communications engineer’s tool kit. A decibel is a method of logarithmically expressing values,
which becomes useful when dealing with large numbers, small numbers, and with equations that
contain many multiplicative or divisive operations. When dealing with quantities of power such
as in communications engineering, the decibel conversion is described with (2.1), in which P
is the power in Watts, and G is the power in decibels (dB). Throughout this thesis, variables
which are in decibels will be marked with the decibel unit in brackets adjacent to them in the
manner used on the variable G in (2.1). The term ‘deci’ in deciBel refers to the multiplier of
10 in the conversion; a Bel refers to the base 10 logarithm of a number. Note that in situations
where power is expressed with voltage and current, these terms are subject to an exponent of
2, leading to a multiplier of 20 rather than 10 in (2.1).
G(dB) = 10 log 10P (2.1)
6

Chapter 2. Satellite Communications 7Page 1 of 1
7/4/2018file:///C:/Users/mmancini/Google%20Drive/Thesis/Figures/Horn_RHCP.svg
10
5
~ f:(:l C/:J
::Q. ·~
0 ·~ cl:!
C) N cl!
§ ii) .µ q
-< -5
-10
Yaxis Xaxis
Figure 2.1: Example antenna pattern of a horn antenna
2.2 Antennas
There are many different types of antenna, each with different performance characteristics. One
of the most important parameters of an antenna is gain, which refers to the fractional increase
or decrease in power at a specified direction compared to an isotropic antenna [16], measured in
“decibels relative to isotropic”, dBi. As the name suggests, an isotropic antenna is one which
sends or receives electromagnetic signals with an equal power level in all directions. Therefore
for any non-isotropic antenna, the gain in a direction specified in spherical coordinates with
azimuth angle θ and elevation angle φ for a specific frequency f is the ratio of the output power
of the antenna, Pf,θ,φ, to the output power of an isotropic antenna, shown in (2.2) [15]. The
output power of the isotropic antenna is simply the input power PI distributed equally over the
surface area of a unit sphere (4π).
Gf,θ,φ =Pf,θ,φPI4π
(2.2)
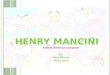
An ‘antenna pattern’ or ‘gain pattern’ is a graph which displays the gain of the antenna
for a desired frequency in each direction; an example can be seen in Figure 2.1. Alternatively,
for applications in which the output power of the antenna is of more importance than the gain
pattern, the half-power beamwidth of an antenna is the angle between the points at which the
antenna radiates half of the maximum output power [15]. The vector of maximum output of an
antenna is known as the boresight, therefore the half-power beamwidth describes a cone about
the boresight of the antenna.
A passive antenna is one which does not add any power or energy to the signal; integrating
the output power of the antenna at each point on the surface of a sphere over the surface area of

Chapter 2. Satellite Communications 8
Z
Y
X
Y
X
Y
X
Z Z
Linear Polarization
Y
X
Y
X
Y
X
Circular Polarization Elliptical Polarization
Figure 2.2: Antenna polarization types
the sphere will return the input power, although there will likely be some small amount of loss
due to inefficiencies. An active antenna is one which amplifies the signal, therefore increasing
the gain of the antenna. Receive antennas use Low Noise Amplifiers (LNAs), components which
increase the power level of very weak signals in the bandwidth of interest. This amplification will
also amplify any noise in this band, however LNAs maintain the Signal-to-Noise Ratio (SNR)
of the original signal without contributing significant amounts of noise, especially because the
LNA is located on or near the antenna itself. Transmit antennas use High Power Amplifiers
(HPAs) which operate in a similar manner as LNAs, although maintaining a low SNR may be
less important than achieving a high gain, and therefore the focus of a HPA is to provide the
highest output power without significantly degrading the signal. LNAs and HPAs increase the
gain of the antenna without increasing the size of the antenna, a very important consideration
in satellite communications where antennas size is limited by the size of the spacecraft.
2.2.1 Polarization
Another important antenna parameter is polarization, which describes how an antenna will
affect the electric field around it; polarization refers to the figure or shape created by the
electric field vector emitted by the antenna over time [15]. This shape is found by summing
the components of the electric field orthogonal to the direction of travel of the wave, and is
largely determined by the antenna type. The two types of polarization are linear and elliptical,
although a common special case of elliptical polarization known as circular polarization exists
when orthogonal components of the electric field are equal. These three polarization types
can be seen in Figure 2.2. Due to the sinusoidal nature of the electric field vector, both the
amplitude and the phase of the electromagnetic wave are important in the determination of
the antenna gain pattern. The rotation about the direction of propagation of the wave as it is
emitted from the antenna (assuming it is not linearly polarized) determines if it has a right-
handed sense or a left-handed sense, referred to as Right Hand Circular Polarization (RHCP)
and Left Hand Circular Polarization (LHCP) respectively.
The orientation of two antennas with respect to each other becomes very important when
considering polarization, and can provide anywhere between optimal power throughput or no
power throughput in a system [17], as described in Table 2.1. The loss of power due to antennas
being placed in poor orientations with respect to each other is known as polarization mismatch

Chapter 2. Satellite Communications 9
Table 2.1: Polarization loss for various antenna combinations [17]
3-2.1
Transmit Antenna
Polarization
Receive Antenna Polarization
Ratio of Power Received to Maximum PowerTheoretical Practical Horn Practical Spiral
Ratio in dB
as Ratio
Ratio in dB
as Ratio
Ratio in dB
as Ratio
Vertical Vertical 0 dB 1 * * N/A N/AVertical Slant (45 or 135) -3 dB ½ * * N/A N/A Vertical Horizontal - dB 0 -20 dB 1/100 N/A N/A Vertical Circular (right-hand or left-hand) -3 dB ½ * * * * Horizontal Horizontal 0 dB 1 * * N/A N/AHorizontal Slant (45 or 135) -3 dB ½ * * N/A N/A Horizontal Circular (right-hand or left-hand) -3 dB ½ * * * * Circular (right-hand) Circular (right-hand) 0 dB 1 * * * * Circular (right-hand) Circular (left-hand) - dB 0 -20 dB 1/100 -10 dB 1/10 Circular (right or left) Slant (45 or 135) -3 dB ½ * * * *
* Approximately the same as theoretical.
The geometric figure traced by the sum of the electric field vectors over time is, in general, an ellipse as shown in Figure 2. Under certain conditions the ellipse may collapse into a straight line, in which case the polarization is called linear.
In the other extreme, when the two components are of equal magnitude and 90 out of phase, the ellipse will become circular as shown in Figure 3. Thus linear and circular polarization are the two specialcases of elliptical polarization. Linear polarization may be further classified as being vertical, horizontal, or slant.
Figure 2 depicts plots of the E field vector while varying the relative amplitude and phase angle of its component parts.
3-2.2
Figure 2. Polarization as a Function of Ey / Ex Ratio and Phase Angle. Adopted from J.D. Kraus, “Antennas,” 2nd ed., Figure 2-37
For a linearly polarized antenna, the radiation pattern is taken both for a co-polarized and cross polarized response. The polarization quality is expressed by the ratio of these two responses. The ratio between the responses must typically be great (30 dB or greater) for an application such as cross-polarized jamming. For general applications, the ratio indicates system power loss due to polarization mismatch. For circularly polarized antennas, radiation patterns are usually taken with a rotating linearly polarized reference antenna. The reference antenna rotates many times while taking measurements around the azimuth of the antenna that is being tested. The resulting antenna pattern is the linear polarized gain with a cyclic ripple. The peak-to-peak value is the axial ratio, and represents the polarization quality for a circular polarized antenna. The typical RWR antenna has a maximum 3 dB axial ratio within 45 of boresight.
For any antenna with an aperture area, as the aperture is rotated, the viewed dimension along the axis remains constant, while the other viewed dimension decreases to zero at 90 rotation. The axial ratio of an antenna will get worse as the antenna is rotated off boresight because the field contribution from the axial component will remain fairly constant and the other orthogonal component will decrease with rotation.
Figure 3. Circular Polarization – E Field.
Figure 2.3: Axial ratios [17]
loss.
The peak-to-peak ratio of the two orthogonal components of the electric field vector is
known as the axial ratio, and describes how circular the polarization of the antenna is in a
given direction [15]. The envelope of all possible axial ratios is described in Figure 2.3.
2.2.2 Free Space Loss
Free space loss is the reduction in power of a signal as it propagates due to the inverse square
law and effective capture area of the receive antenna. The surface area of the radiated pat-
tern becomes exponentially larger as the signal travels directly away from the source, thereby
reducing the power distribution of the emitted signal [16]. This means that the same amount
of power is spread over a larger area, which reduces the amount of power measured at a single

Chapter 2. Satellite Communications 10
point on the sphere. The effective area required to adequately capture electromagnetic energy
will depend on the frequency of interest, as frequency determines the wavelength of a signal.
This is independent of the distance between the transmitting and receiving antennas. The free
space loss LF is the product of these two considerations, calculated using (2.3), where f is the
frequency of interest, c is the speed of light in a vacuum, and d is the distance of propagation.
LF =
(4πdf
c
)2
(2.3)
2.2.3 Isolation
Antennas which are in close proximity to one another may experience coupling, wherein an an-
tenna absorbs energy emitted by another antenna to the detriment of the transmitting antenna
and sensitive receiver components. The transmitted signal may carry a high power which can
saturate and permanently damage sensitive components on the receiver, potentially leading to
mission failure on a spacecraft. The degree of coupling between antennas is measured with
isolation, which describes the ratio of power received by an antenna to the power transmitted
by another antenna; essentially, isolation is the amount of attenuation between antennas (or
antenna arrays) and should be as large as possible to avoid these issues. As isolation char-
acterizes the throughput between the antennas, isolation between antennas can be increased
by increasing the distance between the antennas (free space loss), changing the antenna orien-
tations/polarizations (polarization mismatch loss), or altering the operating frequency of the
antenna. In a passive two antenna system, the isolation recorded will remain the same re-
gardless of the fed antenna array, however due to how electronics in an active antenna handle
forward and reverse power, this does not hold true for systems involving active antennas.
2.3 Signal Modulation
In Radio Frequency (RF) communications, a carrier signal is a waveform which is varied in
amplitude, frequency, or phase to carry information. The process of applying these changes is
known as modulation, and is completed by a transmitter; a receiver demodulates this signal to
determine the original message. Modulation that uses a continuous signal applied to a carrier
signal is known as analogue modulation, whereas modulation that uses a discrete signal is
known as digital modulation. The use of analogue or digital modulation depends on the data
being transmitted. Generally, modulation is completed with a low frequency and applied to a
higher frequency carrier signal.
There are many different modulation schemes, however the three that will be discussed in
this thesis are Binary Phase Shift Keying (BPSK), Quadrature Phase Shift Keying (QPSK),
and Gaussian Frequency Shift Keying (GFSK). ‘Phase shift’ and ‘frequency shift’ identify the
aspect of the signal which is being varied to achieve modulation, and ‘keying’ refers to the

Chapter 2. Satellite Communications 11
predetermined discrete values which the parameter may be switched (keyed) to, terminology
which originates from when modulation was completed by an operator with a telegraph key.
As their names imply, BPSK and QPSK alter the carrier signal phase. BPSK uses two
phases, −180◦ and 180◦, to modulate a signal and achieve the transmission of one bit per
symbol [18]. A symbol is the state of the carrier, and has a specific frequency, magnitude and
phase. Each phase choice in BPSK refers to a single symbol because there are only two phase
options, which correspond to either a 0 or a 1. QPSK uses four phases, −135◦, −45◦, 45◦, and
135◦ to modulate a signal and achieve the transmission of two bits per symbol [18]. As there
are four options for the phase, two bits must be used to specify each symbol; 00, 01, 10, or
11. GFSK operates by changing the frequency of a carrier signal, and does so by filtering the
pulses through a Gaussian filter rather than changing the frequency instantaneously in order
to create a smooth transition between the frequencies, reducing sideband power but increasing
intersymbol interference.
2.4 Transmitters
As mentioned above, a transmitter is a device capable of converting or applying digital or
analogue information to electromagnetic waves through modulation. An important parameter
for transmitter performance when paired with an antenna is Equivalent Isotropically Radiated
Power (EIRP), which is the required output power from an isotropic emitter to achieve the
same output power as an antenna in the direction of interest [15]. This value is calculated by
multiplying the net power that reaches the antenna by the antenna gain in the direction of
interest.
2.4.1 Power Flux Density
Power Flux Density (PFD) describes how the power of a signal in a frequency range is dis-
tributed over a geometric area, where the power is measured over discrete frequency steps. The
number and bandwidth of these steps describes the resolution of the PFD, calculated with (2.4),
in which a signal within a bandwidth of B at a distance of d from the transmitting antenna has
a PFD of h, expressed in W/(Hz m2).
h =P
4πBd2(2.4)
2.5 Receivers
A receiver performs the inverse operation of a transmitter, converting input electromagnetic
waves to digital or analogue information. Receiver performance is characterized with sensitivity,
which describes the minimum required input signal strength to achieve a desired Bit Error Rate
(BER).

Chapter 2. Satellite Communications 12
2.5.1 Noise Factor
Receiver boards generally contain other components (such as filters or LNAs) which contribute
noise to the system in front of the actual receiver component. The Friis formula for noise
factor, (2.5), determines the total noise factor of the component chain [18]. In this equation,
Fi is the noise factor of an individual active component in the receive chain, and Gi is the
gain contributed by the component. The total noise factor contributed by an active element
in the receive chain depends on the gain of the components in front of it: the first component
dominates the noise contribution of the entire chain because there is no active gain contribution
before it, whereas the final element is less influential in comparison due to the gain of prior
components. Noise factor quantifies the effect of the receiver on the SNR, and can be used as
a figure of merit for the receive chain. SNR measures the strength of the desired RF signal
compared to the undesired power (noise) received.
FT = F1 +F2 − 1
G1+F3 − 1
G1G2+ ...+
Fn − 1
G1G2...Gn−1(2.5)
2.5.2 Thermal Noise
A dominating source of noise to a receiver is thermal noise from the components in the receive
chain. The Friis formula for noise temperature, (2.6), describes the equivalent temperature of
the system (TS) from the loss or gain contributed by each component. The antenna temperature
T0, is typically chosen to be 290 K. (2.6) describes a cascaded system with multiple components
in the chain, in which the temperature of each component depends on the gain of the preceding
components in the same manner as the noise factor [18].
TS = T0 + T1 +T2G1
+T3
G1G2+ ...+
TnG1G2...Gn−1
= T0 + T0F1 +T0(F2 − 1)
G1+T0(F3 − 1)
G1G2+ ...+
T0(Fn − 1)
G1G2...Gn−1
= T0(FT + 1)
(2.6)
The temperature of the system dictates the thermal noise at the receiver, which has a
uniform noise spectral density N0 as defined by (2.7), where k is Boltzmann’s constant.
N0 = kTS (2.7)
2.5.3 Bit Error Rate
Bit Error Rate (BER) is specific to digital communication, and refers to the number of erroneous
bits received in a stream of data. BER is calculated with (2.8), in which bi is the number of
incorrect bits received, and bt is the total number of bits received. The BER of a data link
depends on the ratio between the energy associated with each bit and the noise spectral density

Chapter 2. Satellite Communications 13
Scanned by Cam
Scanner
FSK * BPSK
10-3 QPSK
BPSK MSK
Reed-Solomon ... (255, 223)
0 ... Plus BPSK ... w 10-4 R-1/2, K=7 R-1/2, ... - Viterbi K=7 m Viterbi ... 0 Soft ~
DEC - Shannon --.a Limit ca 10-s .a 0 ... a. DPSK
8FSK*
10-6
12 14 * Noncoherent detection
Figure 2.4: BER versus Eb/N0 for various modulation schemes [19]
of the system, referred to as the Bit-Energy-to-Noise-Density-Ratio (Eb/N0). A high Eb/N0
implies that the received bits contain much more energy than the energy received from the noise
present in the system, and thus the bits are much less likely to be received incorrectly. As the
BER depends on the Eb/N0 of the link, the Eb/N0 of a link is selected to achieve a required
BER. Figure 2.4 displays the relationship between BER and Eb/N0 for various modulation
schemes.
BER =bibt
(2.8)
2.6 Networks
Communication is often dealt with in the scope of networks, a collection of ports and nodes.
The performance of an object containing a port can be quantified with scattering parameters,
referred to as S-parameters, which determine the forward and reflected transmission of a signal.
For a two-port (one input, one output) system such as a cable there are four S-parameters,
shown in (2.9), (2.10), (2.11), and (2.12) in decibels (dB). An antenna only requires the input
reflection coefficient (S11) as it is a one-port network.
S11: The input reflection coefficient or input return loss is the ratio of power which is received

Chapter 2. Satellite Communications 14
Divideror
couplerP1
(a) (b)
P2 = �P1 P1 = P2 + P3
P3 = (1 – �)P1
Divideror
coupler
P2
P3
[S] =[
S12 0 S23S13 S23 0
7.2)
If the network is also lossless, then energy conservation requires that the scattering matrixsatisfy the unitary properties of (4.53), which leads to the following conditions [1, 2]:
|S12|2 + |S13|2 = 1, (7.3a)
|S12|2 + |S23|2 = 1, (7.3b)
|S13|2 + |S23|2 = 1, (7.3c)
S∗13S23 = 0, (7.3d)
S∗23S12 = 0, (7.3e)
S∗12S13 = 0. (7.3f)
Equations (7.3d)–(7.3f) show that at least two of the three parameters (S12, S13, S23) mustbe zero. However, this condition will always be inconsistent with one of equations (7.3a)–(7.3c), implying that a three-port network cannot be simultaneously lossless, reciprocal,and matched at all ports. If any one of these three conditions is relaxed, then a physicallyrealizable device is possible.
If the three-port network is nonreciprocal, then Si j �= S ji , and the conditions of inputmatching at all ports and energy conservation can be satisfied. Such a device is known as acirculator, and generally relies on an anisotropic material, such as ferrite, to achieve non-reciprocal behavior. Ferrite circulators will be discussed in more detail in Chapter 9, but
Figure 2.5: (a) Power divider; (b) Power combiner [20]
at port 1, P1R, to the amount of power incident from port 1, P1I .
S11(dB) = 10 log10P1R
P1I(2.9)
S12: The reverse transmission coefficient or reverse isolation is the ratio of power which is
received at port 1, P1R, to the amount of power incident from port 2, P2I .
S12(dB) = 10 log10P1R
P2I(2.10)
S21: The forward transmission coefficient or power gain is the ratio of power which is received
at port 2, P2R, to the amount of power incident from port 1, P1I .
S21(dB) = 10 log10P2R
P1I(2.11)
S22: The output reflection coefficient or output return loss is the ratio of power which is received
at port 2, P2R, to the amount of power incident from port 2, P2I .
S22(dB) = 10 log10P2R
P2I(2.12)
2.7 Power Dividers and Power Combiners
A power divider (or power splitter) is a device which separates an input signal into multiple
output signals. Conversely, a combiner is a device which merges multiple input signals into
a single output signal. There are multiple types of power dividers and combiners, but in this
thesis discussion will be limited to equal-division (α = 0.5) three-port power dividers and power
combiners, as illustrated in Figure 2.5. Note that if the device is a passive component it can
operate as either a divider or a combiner; the only difference in application is the direction
of input power. These components are simple and robust, ideal for power applications in the
space environment.

Chapter 2. Satellite Communications 15
IFamplifierand filter
Localoscillator
MixerRF
amplifier
Figure 5.14 A high quality communications receiver that uses the superhetprinciple (courtesy Icom UK)
Figure 2.6: Example block diagram of a basic heterodyne [16]
2.8 Filters
A filter is a two-port network which admits frequencies in the passband with little effect in
transmission, while attenuating signals in the stopband [20]. This thesis will limit discussion to
three types of filter: band pass filters, low pass filters, and high pass filters. Band pass filters
will block signals above and below a specified pass band, low pass filters will block signals
above a specified frequency, and high pass filters will block signals below a specified frequency.
The most important parameters for the selection of a filter are the attenuation provided in the
stopband, the insertion loss of the passband, and the frequency ranges of the passband and
stopband.
2.9 Frequency Converters
Frequency converters amplify weak RF signals and change the frequency of the signal. Down
converters adjust the signal to a lower frequency, whereas up converters alter the frequency
of the signal to a higher frequency. Up converters or down converters are used when the link
frequency lies outside of the operational range of the transmitter or receiver.
Frequency conversion is achieved with a heterodyne, a system which uses a mixer and a
local oscillator to convert the input signal to a fixed intermediate frequency which is easier to
filter and amplify [16]. This mixing produces several unwanted signals which must be filtered
out with a tuned RF circuit. A basic heterodyne is displayed in Figure 2.6.

Chapter 2. Satellite Communications 16
Satellite 1 Satellite 2
Ground
Uplink
Intersatellite
Downlink
Station AGroundStation BEarth
Orbit
Link
Figure 2.7: Communication link directions.
2.10 Communication Links
A ground station is always used as the point of reference for the ‘direction’ of a communication
link; uplink refers to the transmission of data from a ground station ‘up’ to a satellite, downlink
indicates that the transmission of data is from a satellite ‘down’ to a ground station, and
intersatellite link describes communication between satellites. The direction of propagation of
each of these links is shown in Figure 2.7. Communication between two or more points can be
described as simplex, half-duplex, or full-duplex, which refer to how these links are implemented.
A simplex system is made up of a single transmitting device at one end of the link and a single
receiving device at the other end of the link, resulting in one-way communication. A half-duplex
system contains a transmitting device and a receiving device at each end of the link, but each
end of the link can only either send or receive at any given time. Lastly, a full-duplex system
consists of a transmitting device and a receiving device at each end of the link, where both ends
can send and receive data simultaneously.
2.10.1 Data Throughput
Data throughput is the amount of data successfully received over a link, determined by the
data rate, BER, and the amount of time over which the link is established, assuming that there
is a sufficient link margin. (2.13) provides the amount of data (in bits) successfully received
over a data link, DL. The total data originally transmitted is the product of the data rate R
and the time spent transmitting, tT . Data that is lost due to the BER is the product of the
BER and the total data originally transmitted. The amount of useful data D can be found
with (2.14) by correcting for data overhead. This is completed by multiplying the successfully
transmitted data by the ratio of the desired data in a packet d to total data packet size p. Note
that there are other imperfections in the link that will degrade performance of the link, however
in conjunction with an accurate link budget, this analysis presents a realistic approximation to
the data throughput.
DL = R tT (1−BER) (2.13)

Chapter 2. Satellite Communications 17
D = DL
(dp
)(2.14)
2.10.2 Coherent and Noncoherent Modulation
Some modulation schemes, deemed ‘coherent’, require an unmodulated locally generated carrier
signal to act as a reference for demodulation. When an incoming signal is detected, the receiver
will begin to generate a predetermined carrier signal such that the signals are synchronous.
The receiver can then detect the difference in the signals to determine the encoded information.
Phase shift keying is an example of coherent modulation, in which the phase of the modulated
signal must be compared to a local unmodulated signal to determine the phase difference.
Modulation schemes which do not require a locally generated signal for demodulation are known
as ‘incoherent’, or ‘noncoherent’. These are modulation schemes which do not need to be
compared to an external signal, such as frequency shift keying. Coherent detection requires
the addition of a carrier recovery circuit to the receiver chain, thereby increasing cost and
complexity, however it also decreases the BER of the signal, increasing the overall performance
of the system.
2.11 Communications Subsystem
A spacecraft bus, or platform, is the infrastructure which supports and oversees the operation
of the payload. The spacecraft bus is a system which is split into multiple subsystems, each
responsible for completing certain tasks. The communication subsystem of a spacecraft is the
portion of the spacecraft bus which facilitates communication with external objects in the
form of uplink, downlink, and intersatellite link. Generally, this amounts to converting radio
signals to digital signals for receiving data, and converting digital data to radio signals for
transmitting data. Uplinked data consists mostly of commands which instruct the satellite
to complete actions at predetermined times, however there may also be software updates for
certain components to improve performance on-orbit. Spacecraft telemetry, which describes
the health and status of the spacecraft, and payload data account for downlinked data. The
amount of payload data from a spacecraft depends on the payload itself, but payload data is the
largest exchange of data in a mission as the payload is the driving reason behind establishing
a mission.

Chapter 3
Communications Subsystem Design
This chapter details the design of the NorSat-3 communications subsystem, providing infor-
mation on the individual components and the overall performance of the subsystem. The
requirements for the communications subsystem are listed, however this chapter will not de-
tail the compliance of the current design to these requirements. Rather, subsequent chapters
will provide more detailed information and analysis on aspects of the design, as well as their
compliance to requirements.
3.1 Requirements
The requirements for the communications subsystem are listed in Table 3.1. These include
functional requirements and performance requirements, and are determined by customer spec-
ifications as well as Space Flight Laboratory (SFL) performance capabilities. Requirement
NS3-COM-R001 stipulates that the communication links used on NorSat-3 are to be in the
S-band frequency range, as communication frequencies must be reserved to avoid interference
with other communications systems. To ensure that data or commands may be uplinked to the
spacecraft while it is downlinking important telemetry or data, requirement NS3-COM-R002
establishes that communication with the spacecraft must be full duplex. Requirement NS3-
COM-R003 outlines a few key aspects of the communications subsystem design, specifying the
maximum distance between the satellite and ground station with the minimum elevation angle
(as well as the orbit altitude), which is used to find the maximum free space loss. The spacecraft
antenna gain is used to find the total link margin, however the antenna gain also determines
the coverage about the spacecraft; therefore the minimum gain threshold needed to achieve
75% gain coverage about the spacecraft can be used to find the minimum link margin. Links
budgets are heavily dependant on ground station parameters, which are defined in requirement
NS3-COM-R004 from measurements taken at the ground stations used for the NorSat-3 mis-
sion. The ability to upload data and commands to a satellite is imperative to mission success,
thus requirement NS3-COM-R005 dictates the use of a receiver that has been proven to operate
on-orbit as the method of receiving commands on the satellite. One of the risks associated with
18

Chapter 3. Communications Subsystem Design 19
Table 3.1: Communication subsystem requirements
RequirementNumber
Requirement
NS3-COM-R001 Radio Frequency (RF) communications for command, telemetry, anddownlink of payload data between the ground station and satellite shallutilize the S-band.
NS3-COM-R002 Communication with the spacecraft shall be full duplex.
NS3-COM-R003 Command and telemetry link margins (uplink and downlink) shall be noless than 6 dB with a minimum coverage of 75% about the spacecraft, ata minimum elevation angle of 5 degrees.
NS3-COM-R004 All link analysis shall use the following ground station parameters: Vardø(Primary), EIRP = 82.38 dBm, G/T = 14.72 dB/K; Svalbard (Back-up),EIRP = 79.37 dBm, G/T = 12.40 dB/K
NS3-COM-R005 The spacecraft shall include a command receiver with flight heritage.
NS3-COM-R006 The uplink data rate shall support uplink of 20 MB over 24h using Vardøground station, given nominal operating conditions.
NS3-COM-R007 The downlink data rate shall support downlink of 500 MB over 24h usingVardø ground station, given nominal operating conditions.
NS3-COM-R008 The spacecraft shall be able to communicate with the ground station witha maximum rotation rate of 20◦/s about any arbitrary axis.
NS3-COM-R009 When powered, it shall not be possible for the system to hold its primarycommand receiver in an unpowered state for greater than 5 seconds.
using a new payload on a satellite mission is that the software may need to be updated to
improve performance, as may be the case for the Navigation Radar Detector (NRD) payload;
therefore, Requirement NS3-COM-R006 outlines that NorSat-3 must be capable of receiving
up to 20 MB over 24 hours from the Vardø ground station to allow software updates to the
payload. As the NRD and Automatic Identification System (AIS) payloads and the spacecraft
are expected to generate a large amount of data, NS3-COM-R007 stipulates that the spacecraft
must be able to send up to 500 MB over 24 hours to the Vardø ground station. In addition
to NS3-COM R004 and NS3-COM-R005, requirements NS3-COM-R008 and NS3-COM-R009
seek to maximize the robustness and reduce the risk in the communications subsystem design.
Requirements at the system level, or requirements from other subsystems, which directly
impact or are directly impacted by aspects of the communications subsystem are listed in Table
3.2. Requirements NS3-SYS-R001 and NS3-SYS-R022 are relevant to the link budget, estab-
lishing the maximum orbit altitude and the ground station parameters which will be used. The
payload receivers are very sensitive devices and impose emission limitations on the spacecraft
bus with Requirements NS3-SYS-R012, NS3-SYS-R013, and NS3-SYS-R014. The spacecraft
downlink system is the main source of electromagnetic emissions on the satellite, and must be
designed to allow uninhibited operation of the payloads. As antennas are be mounted exter-
nally on the spacecraft, care must be taken to avoid impacting the deployment of the satellite,
and to avoid making changes to the design of the deployer, as outlined with requirements NS3-

Chapter 3. Communications Subsystem Design 20
Table 3.2: Requirements affecting the communications subsystem design
RequirementNumber
Requirement Relevance
NS3-SYS-R001 The spacecraft shall be designed to operate in any highinclination orbit with an altitude between 550 and 720 km.
Link bud-get
NS3-SYS-R012 The spacecraft platform shall limit platform generatednoise at the input to the NRD payload to -175 dBm/Hzover the entire NRD operating band.
Downlinkoutput
NS3-SYS-R013 The spacecraft platform shall limit platform generatednoise at the input to the AIS payload to -170 dBm/Hzover the entire maritime Very High Frequency (VHF) bandfrom 156.025 MHz to 162.025 MHz.
Downlinkoutput
NS3-SYS-R014 The spacecraft platform shall limit platform generatednoise at the input to the AIS payload to specific powerlevels as measured across particular maritime VHF chan-nels as specified in CS-49.
Downlinkoutput
NS3-SYS-R015 The spacecraft dimensions, including appendages, shall becompatible with a qualified SFL satellite deployment sys-tem (XPOD Duo).
Antennapositioning
NS3-SYS-R018 The spacecraft should not require any major modificationsto the selected XPOD design.
Antennapositioning
NS3-SYS-R022 The spacecraft shall be designed to use a single groundstation located in Vardø, Norway.
Link bud-get
NS3-STR-R003 A minimum of two AIS antennas shall be provided by SFLand mounted externally. The antenna elements shall bemounted orthogonally, and such that AIS reception is op-timized during NRD payload operations.
Antennapositioning
NS3-STR-R006 A GPS antenna shall be accommodated in a location thatminimizes obstructions and maximizes performance duringNRD payload operations.
Antennapositioning
SYS-R015 and NS3-SYS-R018. Further to these mechanical constraints on the positions of the
antennas, requirements NS3-STR-R003 and NS3-STR-R006 impose performance requirements
for the placement of the Global Positioning System (GPS) and AIS antennas mounted on the
spacecraft. Note that this thesis will not extend to the design, analysis, and testing required to
confirm that the entire spacecraft bus is compliant to these requirements, only that the com-
munications subsystem meets these requirements. These requirements are subject to further
testing which is beyond the scope of this thesis.

Chapter 3. Communications Subsystem Design 21
3.2 High Level Design Approach
The uplink system is the primary method of receiving commands on NorSat-3; it is used to
command all functions of the spacecraft, and as such it must be active at all times when power is
supplied by the spacecraft power system. The uplink system is a critical link to the spacecraft,
and therefore must be designed to be robust and reliable. To reduce risk involved with sending
information to the spacecraft, requirement NS3-COM-R005 outlines the use of a command
receiver with flight heritage, guaranteeing that NorSat-3 will have a receiver that has proof
of sufficient performance on orbit. The SFL designed and built Ultra High Frequency (UHF)
receiver has flown on many previous SFL missions, and therefore has sufficient flight heritage.
However, a simple data budget reveals that the 4 kbps uplink speed offered by the UHF receiver
is not sufficient to meet the 20 MB uplink requirement set by NS3-COM-R006 based on the
orbit altitudes, even assuming a perfect link every orbit. An alternative option is to use the new
S-band receiver designed and built at SFL which offers a 32 kbps data rate capable of meeting
the 20 MB uplink requirement, although this component does not have flight heritage. There
are therefore two possibilities; using an external receiver which meets all requirements, or using
both the UHF and the S-band receivers. Locating a receiver built by an external company
which meets all relevant requirements can be rather difficult, especially when considering the
changes required to spacecraft structure, interfaces, and software to accommodate the receiver.
It is a much safer choice to use the two SFL receivers, which have been designed with SFL
standards on mechanical and electrical design, radiation tolerance, and hardware and software
interfaces. The use of two receivers increases mass and increases the effort to implement them
into the bus, however the reduced risk makes this a beneficial choice.
The UHF receiver will be designated as the command receiver in accordance with require-
ment NS3-COM-R005, however the UHF receiver operates in the UHF band, while requirement
NS3-COM-R001 stipulates that links used for command must be in the S-band. This neces-
sitates the use of a down converter in the uplink chain, which will also serve to amplify the
RF signal. As the spacecraft uplink antennas will be in the S-band, two hemispherical patch
antennas mounted on opposite sides of the spacecraft may be used to achieve the 75% spherical
coverage mentioned in requirement NS3-COM-R003.
The S-band receiver operates directly in the S-band with on-board amplification and filter-
ing, and therefore does not require additional external components. The link is not subject to
requirement NS3-COM-R003 as the S-band receiver is not a command receiver, and as such
a single antenna may be used. This link is only necessary during times of nominal spacecraft
operation, when there will be sufficient attitude control to point the high speed uplink antenna
towards the ground station.
The transmit power must be sufficient to allow communication in any orbit with an altitude
between 550 km and 720 km as per requirement NS3-SYS-R001. The transmitter that is
designed and built by SFL provides a high enough output power to meet this requirement. A
simplistic data budget reveals that the downlink system must have an average data rate of at

Chapter 3. Communications Subsystem Design 22
least 450 kbps to achieve a downlink of 500 MB in one day for a circular orbit at 550 km, and an
average of at least 389 kbps for a circular orbit of 720 km. As these values lie within the range
of data rates of the transmitter, 32 kbps to 2048 kbps, requirement NS3-COM-R007 can be
met with the SFL transmitter. The transmitter operates in the S-band, and therefore does not
require any external components to complete frequency conversion. The use of a filter on each of
the two transmitter output ports is included to suppress spurious output at sensitive spacecraft
frequencies. The 75% coverage about the spacecraft can be met with two hemispherical patch
antennas placed on opposite sides of the spacecraft, completing the downlink design.
The UHF receiver, S-band receiver, and S-band transmitter are designed to allow full duplex
operation of the satellite in accordance with NS3-SYS-R002. The combination of UHF receiver
and S-band transmitter on many previous SFL missions and extensive testing performed on
these units guarantees that uplink and downlink can be performed simultaneously.
3.3 Uplink System
The block diagram for the NorSat-3 uplink chain is shown in Figure 3.1. It includes two S-band
patch antennas, a combiner, a band pass filter, a down converter, and a UHF receiver. The
uplink subsystem shall operate at a frequency of 2032.965 MHz with Gaussian Frequency Shift
Keying (GFSK) modulation, although the design of the subsystem can be used for frequencies
in the range of 2025 to 2110 MHz.
The two S-band patch antennas together with the combiner are used to provide omni-
directional coverage around the spacecraft to ensure that the ground station will be able to
communicate with the satellite for various spacecraft attitudes. The uplink and downlink
signals will be in the S-band and potentially close in frequency, which decreases the isolation
between the uplink and downlink antennas. Thus a band pass filter is implemented before the
down converter to prevent the allowance of the potentially harmful high-power downlink signal
to be amplified by the down converter and accepted by the receiver. The weak signal entering
the down converter is amplified by a Low Noise Amplifier (LNA), and then down converted to
a UHF frequency so that it can be demodulated by the UHF receiver. The design for the uplink
system is inherited from the uplink system used on NorSat-1 and NorSat-2, both of which are
operating on-orbit. Analysis and testing completed on these missions has also confirmed that
the uplink system is compliant with requirement NS3-COM-R008.
3.3.1 Ultra High Frequency Receiver
The main function of the UHF receiver is to demodulate the signal from the output of the down
converter and send the resulting digital signals to the spacecraft through the bus interface. The
UHF receiver is comprised of five main elements, as illustrated in Figure 3.1; a power regulator,
a modem, a descrambler, a transceiver, and an LNA [21].
Power is supplied to the UHF receiver by the power subsystem on a regulated power line,

Chapter 3. Communications Subsystem Design 23
S-band
AntennasUHF
Receiver
Down
Converter
Band Pass
Filter
Combiner
Bus
Inte
rfac
eAnalog Data
Digital Data
Power
Figure 3.1: Block diagram of the uplink subsystem
Descrambler Modem Transceiver LNA
Power
Bus
Interface
From
Down
Converter
Figure 3.2: Block diagram of the SFL UHF receiver [21]
although the receiver also contains power regulation circuitry to allow it to accept a wide voltage
range without degrading performance. The receiver supply is designed to be always powered by
the power system to allow the reception of commands throughout the operational lifetime, in
accordance with requirement NS3-COM-R009. An on-board, high-performance LNA is included
between the transceiver and the antenna to enhance the sensitivity of the receiver. The LNA
has a sufficiently high compression point to avoid degraded performance due to the spacecraft’s
transmit signal. An integrated UHF transceiver which contains all the necessary functions for
frequency demodulation directly at UHF frequencies is configured in receive mode such that it
operates only as a receiver. A modem performs the conversion between the baseband analogue
signal output from the transceiver and the synchronous digital signal received by the spacecraft
on-board computer. The binary data transmitted by the ground station is scrambled before
transmission to cause a largely random data stream to be sent across the radio link, even in the
case of source data that contains a severe imbalance of ‘0’s and ‘1’s. This scrambling provides
a richness in the bit transitions that is necessary for the modulation approach used.
3.3.2 Down Converter
The down converter is used to amplify the weak signal received by the antennas and to convert
this amplified signal to a UHF frequency. This down converter was included on the NorSat-1

Chapter 3. Communications Subsystem Design 24
2025-2110
MHz Input
Phase
Detector
Output
Frequency
÷N÷MReference
Oscillator
Band Pass
FilterLNA
Band Pass
FilterMixer
Low Pass
Filter
Local
Oscillator
Loop Filter
Figure 3.3: Block diagram of the down converter [21]
and NorSat-2 microsatellites for the same function. Two filters reduce the out-of-band noise
from the input, while an LNA amplifies the signal prior to mixing. A frequency is generated on
the board from a reference oscillator and mixed with the signal to reduce it to the intermediate
frequency in the manner of a heterodyne. The signal then passes through a filter before exiting
the down converter.
3.3.3 Band Pass Filter
The band pass filter has been selected to provide sufficient suppression of out of band interfer-
ence to avoid damaging the down converter and UHF receiver. The filter has an insertion loss
of less than 1.0 dB over the pass band, and at the downlink frequency range the band pass filter
has a rejection lower limit of greater than 40 dB. As the S-band transmitter in the downlink
system has an output of less than 30 dBm (milliWatt decibels), the filter can attenuate this
signal to a level which is safe for the components in the uplink chain.
3.3.4 Combiner
The combiner is used to merge RF signals from the two patch antennas and then output this
signal to the band pass filter. As mentioned in Section 2.7, this combiner is a passive, equal-
division, three-port combiner which sums the signals from the two input ports and provides the
resulting signal from the output port.
3.4 High Speed Uplink System
The high speed uplink system is included in the design of the communication subsystem to
allow for increased uplink data rates to support payload software updates. The system will use
a new receiver designed by SFL which includes an on-board down converter such that it can
receive S-band frequencies directly, and is compatible with data rates up to 32 kbps. The high
speed uplink system will only be used during payload operations when 3-axis attitude control is
present, which allows the use of a single antenna for high speed uplink. As the S-band receiver

Chapter 3. Communications Subsystem Design 25
S-band
Antenna
S-band
Receiver
Bus
Inte
rfac
eAnalog Data
Digital Data
Power
Figure 3.4: Block diagram of the high speed uplink system
is a new design, it’s use on NorSat-3 also serves a technology demonstration, opening use of
the receiver for other space missions. There is risk associated with using only this receiver or
using it as the primary command receiver, because the receiver has not been space qualified.
Including the S-band receiver as a secondary receiver allows it to be qualified for use in space
without causing mission failure if the unit does not perform as expected. The block diagram
for the high speed S-band uplink system is shown in Figure 3.4.
The uplink and high speed uplink systems will use different frequencies to limit the reception
of the same signals by both receivers. However it should be noted that as the modulation rates
are different on each receiver, high speed data is unable to be correctly received by the command
receiver, and low speed data is unable to be correctly received by the high speed receiver, even if
they operate at the same centre frequency. This ensures that each subsystem will only provide
information directed toward it to the spacecraft bus.
The frequency range for the high speed S-band receiver is from 2025 to 2110 MHz, and data
is modulated using GFSK modulation. For NorSat-3 the S-band receiver shall be configured to
operate at a frequency of 2032 MHz.
3.4.1 High Speed S-Band Receiver
The block diagram of the high speed S-band receiver is shown in Figure 3.5. It includes
an S-band LNA chain, a mixer, a local oscillator, a UHF receiver, a modem, and a Field-
Programmable Gate Array (FPGA). Like the UHF receiver, the function of the high speed
S-band receiver is to provide reliable communication from the ground to the spacecraft during
the operational life of the spacecraft.
Power is supplied to the S-band receiver by the power system; it is capable of accepting

Chapter 3. Communications Subsystem Design 26
2025-2110
MHz Input
Reference
Oscillator
Receiver
Intermediate
Frequency
Phase-Locked
Loop
Synthesizer
FPGA
Reference
Frequency
Modem
Filter and
LNA ChainMixer S-band Filter
High Pass
Filter
50 Ohm Load
Figure 3.5: Block diagram of the high speed S-band receiver [22]
power at a wide voltage range, which is filtered and regulated on-board. The weak RF signal
at the input of the receiver is fed through a chain of filters and LNAs to suppress any out
of band interference and amplify the weak signal. The mixer then down converts the S-band
signal to a fixed UHF frequency which can be received by the UHF receive section. The UHF
receive section demodulates the signal and sends digital command and data signals to the
spacecraft through the bus interface. The UHF receiver chip is almost identical to the UHF
receiver described in Section 3.3.1, with a different package; thus many of the components used
in the receiver have significant flight heritage. The receiver includes a telemetry system with
11 telemetry points, providing useful data on the performance of the new receiver on orbit.
3.5 Downlink System
The S-band downlink is comprised of two patch antennas, two filters, and a two-board trans-
mitter designed by SFL, as seen in Figure 3.6. The transmitter has significant flight heritage
through use on previous SFL missions; it is capable of switching data transmission rates and
modulation formats upon command from the ground station, and it contains active and au-
tomatic output power regulation to allow for consistent operation over a wide temperature
range.
The configurable bit rate and modulation scheme allow for the S-band downlink system to
operate in many different arrangements, which will be separated into two modes; Acquisition

Chapter 3. Communications Subsystem Design 27
S-band
Antennas
S-band
Transmitter
Bu
s In
terf
ace Analog Data
Digital Data
Power
Band Pass
Filters
Figure 3.6: Block diagram of the downlink system
Mode and Payload Data Downlink Mode.
Acquisition Mode: Ensures command and control of spacecraft. The lowest allowable bit
rate, determined with a Power Flux Density (PFD) analysis, is used to communicate
with the ground station with Binary Phase Shift Keying (BPSK) modulation.
Payload Data Downlink Mode: Maximizes the downlink data throughput of the satellite
by using Quadrature Phase Shift Keying (QPSK) modulation and the variable data rate.
The data rate can be varied between the lowest allowable data rate and 2048 kbps de-
pending on the link margin, or can be operated at a single data rate.
3.5.1 S-band Transmitter
A block diagram of the transmitter, designed by SFL and used on both NorSat-1 and NorSat-
2, is shown in Figure 3.7. The transmitter is capable of operating at data rates between 32
kbps and 4096 kbps, although the data rate will be limited to a maximum of 2048 kbps for
NorSat-3. Modulation occurs at the radiated frequency on the carrier signal, created by mixing
two frequencies in order to reduce emissions which may cause issues with other spacecraft
components. The transmitter uses the bus voltage to complete power conversion for its own
components, which also allows for improved power consumption and noise performance. An
FPGA provides data stream formatting, telemetry interfacing, and transmitter configuration
in the digital section of the transmitter while a quadrature modulator is used to generate the
modulated RF signal, which will be in either BPSK or QPSK. This signal is then amplified with
the power amplifier stages, which provide the necessary output power to meet the link margin
and data transmission rate requirements. A power sensing circuit after the final stage provides
an indication of both the transmitter output power, and the reflected power from the antenna.

Chapter 3. Communications Subsystem Design 28
FPGAPulse
ShaperModulator
Power
Amplifier
Power
Leveller
Clock
Generator
Local
Oscillator 1
Up
Converter
Local
Oscillator 2
Antenna
Interface
Bus
Interface
Figure 3.7: Block diagram of the SFL S-band transmitter [21]
The transmitter also features a power levelling circuit, which is a feedback control circuit that
uses a variable gain amplifier to maintain the transmitter output power at a specific level over
the operational temperature range. The desired output power level is set on the ground at build
time and will not be altered in-flight. The final stage of the transmitter is the output interface.
A band pass filter is included to reduce the spurious emissions generated by the power amplifier.
The signal is then split in an equal-amplitude, equal-phase fashion to feed the two antennas.
3.5.2 Filter
There are strict requirements on spacecraft emissions from both the AIS and NRD payload
receivers. As these receivers are very sensitive, there is a risk of the high powered downlink
signal overpowering the weak transmissions of interest to the payload. Therefore, to ensure
that the transmitter does not affect the quality or amount of data gathered by the payloads,
a filter is included in the downlink chain to reduce the output power of the transmitter at the
sensitive payload frequencies. The rejection level and type of filter required will be established
through analysis and testing.

Chapter 4
Link Budgets
4.1 Background
A link budget is a method of calculating the performance of a communication link by taking
into account all gains and losses experienced by a signal from transmission to reception [19].
In its simplest form, a link budget is the comparison between the actual signal power level
at the receiver to the required signal power level at the receiver. A more thorough approach
uses the Signal-to-Noise Ratio (SNR), which is the signal power at the receiver divided by the
noise power at the receiver, while including effects from modulation. The SNR is compared
to the SNR required for the specified signal modulation at a desired Bit Error Rate (BER).
The difference between the calculated SNR and the required SNR is the link margin, which is
subject to system requirements. An alternative method uses the signal Bit-Energy-to-Noise-
Density-Ratio (Eb/N0) in a similar fashion to find the link margin.
A positive link margin ensures that the system will meet the desired minimum performance;
completing a link budget with the required link margin under worse conditions than those
that will be experienced guarantees that the system will perform adequately under nominal
conditions. Link budgets are used to design communications systems from the earliest stages
of the design and are updated throughout the design process. A link budget can be divided
into five sections:
1. Transmitting Section: Power emitted from the transmitting antenna
2. Signal Path: Power arriving at the receiving antenna
3. Receiving Section: Effects of the receiving system
4. Modulation Effects: Improvements due to signal modulation
5. Link Margin: Evaluating the performance of the link
4.1.1 Transmitting Section
The first segment of a link budget is used to find the Equivalent Isotropically Radiated Power
(EIRP) emitted from the transmitting antenna. The EIRP must capture the entire performance
29

Chapter 4. Link Budgets 30
of the transmitting section, including the transmit power P , feed loss LC,T , antenna gain, GA,T
pointing loss LO, and radome transmission loss LR. Pointing loss is a factor which quantifies the
reduction in power experienced from the imperfect pointing accuracy of the transmit antenna,
such that the receive antenna is not located along the boresight of the transmit antenna. This
factor is very small for ground stations due to the high accuracy of the antenna positioner, and
can be very high for satellites as the satellite may be in a poor orientation with respect to the
ground station. Radomes are mechanical features around or near antennas to protect them
from damage or environmental effects, thus the radome transmission loss LR accounts for the
impact of radomes on the link. Estimates or measurements for each of these gains and losses
are used to find the EIRP of the transmit system, PEIRP , with (4.1).
PEIRP = P LC,T GA,T LR LO (4.1)
4.1.2 Signal Path
The second section of a link budget describes the path which the signal takes to reach the
receiving antenna. For a spacecraft this is governed almost entirely by free space loss LF ,
which is calculated with (2.3). Other considerations are the polarization mismatch loss (LM )
to capture that the ground station antenna will not be perfectly circularly polarized, and
the atmospheric loss (LA) to identify the effect of the atmosphere on the transmitted signal.
The atmospheric loss experienced by a signal depends on its frequency, as signals with high
frequencies have small wavelengths that are more susceptible to attenuation from moisture in
the air. The total propagation loss in (4.2) is combined with the EIRP to find the isotropic
signal power at the receive antenna, PR,I , as shown in (4.3).
LP = LF LM LA (4.2)
PR,I = PEIRP LP (4.3)
4.1.3 Receive Section
The performance of the receiving system accounts for the losses experienced from the antenna
and feed system as well as the receiver itself. The receive antenna gain GA,R, receive system
feed losses LC,R, and the system noise temperature (calculated with (2.6)) are used to find
the Gain-to-Noise-Temperature-Ratio (G/T) of the receiver with (4.4). The G/T of a link is a
figure of merit which evaluates the sensitivity of the receive system, with higher ratios providing
better system performance [19]. Note that for a spacecraft the antenna gain will likely be small
to capture the possibility of a poor orientation with respect to the ground station antenna,

Chapter 4. Link Budgets 31
causing a poor axial ratio and therefore a high polarization mismatch loss.
G
T=GA,R LC,R
TS(4.4)
The receiver signal power, or the strength of the carrier signal that reaches the receiver, is
found by applying the receive antenna gain and receive system feed losses to the signal that
reaches the receive antenna, as shown in (4.5). The receiver noise power (the strength of the
ambient noise that reaches the receiver) is found with (4.6), where the noise spectral density
N0 is determined with (2.7) and B is the bandwidth of the received signal.
C = PR,I GA,R LC,R (4.5)
N = N0 B (4.6)
The Carrier-to-Noise-Density-Ratio (C/N0) is the ratio of the received power to the noise
spectral density of the system, as shown in (4.7). Similarly, the Carrier-to-Noise-Ratio (C/N)
is the ratio of the received power to the noise power of the receiver system within the receiver
bandwidth, calculated with (4.8).
C
N0=PR,Ik
(G
T
)(4.7)
C
N=PR,Ik B
(G
T
)(4.8)
The amount of energy received per bit, Eb, in (4.9) is the received power multiplied by the
duration of the bit transmission, equivalent to the received power divided by the data rate R.
Eb =C
R(4.9)
The Eb/N0 is therefore a quantity which compares the energy contained in the received
signal to the received noise. The Eb/N0, calculated with (4.10), is the main equation used for
sizing a communications link. Conservatism is included in the form of implementation loss LI
due to the importance of this equation.
EbN0
=LIR
(C
N0
)(4.10)
At this point the entire physical link has been captured, however there may be special
considerations due to the modulation used on the signal. The fourth section is used to describe
the gains and losses associated with signal modulation.

Chapter 4. Link Budgets 32
4.1.4 Signal Modulation
As mentioned previously, there are two approaches to calculating the effect of modulation on
a link budget: the SNR method, which is used for noncoherent links, and the Eb/N0 method,
which is used for coherent links. The main difference between the two approaches is the band-
width used in the calculation. The SNR method uses the bandwidth of the receiver in calculating
the link margin, while the Eb/N0 method assumes that the receiver uses the minimum possible
bandwidth [23]. The SNR differs from the C/N because of increases in signal strength from
modulation. In the case of frequency modulation, there is a ‘frequency modulation improve-
ment’ due to the fact that most of the power in the pulse is concentrated around the centre
frequency in the bandwidth of the signal. The SNR is therefore the C/N with implementa-
tion losses LI and modulation improvement GM , as seen in (4.11). Typically the modulation
improvement and implementation losses are found through testing, and units which have not
undergone testing are given conservative estimates for these values. Note that noncoherent
links still calculate the link Eb/N0, however the SNR provides a more accurate link margin.
SNR =S
N=(CN
)LI GM (4.11)
4.1.5 Link Margin
When using the SNR method, the calculated SNR is compared to the SNR required for a
desired BER with (4.12) to find the link margin ML. Similarly, the Eb/N0 method compares
the calculated Eb/N0 to the Eb/N0 required for a desired BER to find the link margin with
(4.13). As discussed in Section 2.5.3, the required SNR and Eb/N0 for various modulation
schemes to achieve a desired BER have been well established.
ML =SNR
SNRReq(4.12)
ML =Eb/N0
Eb/N0Req
(4.13)
The requirements pertaining to the NorSat-3 link budgets are found in Table 4.1. These
requirements outline the conditions which must be satisfied by the link budgets, as well as the
necessary link margins.
4.2 Uplink Budget
The uplink budget for NorSat-3 is shown in Table 4.2. This is the primary command receiving
system for the satellite and is therefore mission critical. The link budget is a combination
of top-down (requirements-driven) and bottom-up (hardware-driven) iteration to arrive at the
design outlined in Section 3.3.

Chapter 4. Link Budgets 33
Table 4.1: Link budget requirements
RequirementNumber
Requirement
NS3-COM-R001 RF communications for command, telemetry, and downlink of payloaddata between the ground station and satellite shall utilize the S-band.
NS3-COM-R003 Command and telemetry link margins (uplink and downlink) shall be noless than 6 dB with a minimum coverage of 75% about the spacecraft, ata minimum elevation angle of 5 degrees.
NS3-COM-R004 All link analysis shall use the following ground station parameters: Vardø(Primary), EIRP = 82.38 dBm, G/T = 14.72 dB/K; Svalbard (Back-up),EIRP = 79.37 dBm, G/T = 12.40 dB/K
NS3-COM-R005 The spacecraft shall include a command receiver with flight heritage.
NS3-SYS-R001 The spacecraft shall be designed to operate in any high inclination orbitwith an altitude between 550 and 720 km.
NS3-SYS-R022 The spacecraft shall be designed to use a single ground station located inVardø, Norway.
When the Vardø ground station is used to uplink data, the transmitter power is 50 W (46.99
dBm) at an operating frequency of 2032.965 MHz and the antenna gain is 36.03 dBi, which are
values derived from the EIRP value outlined in Requirement NS3-COM-R004.
A worst case satellite orbit altitude of 720 km and a minimum elevation of 5◦ are used
to calculate a maximum distance to the satellite of 2631 km, resulting in a free space loss of
167 dB. A 1 dB polarization loss and 1 dB atmospheric loss are assumed, resulting in a total
propagation loss of 169 dB. The isotropic signal at the spacecraft is then -86.62 dBm.
The receiving antenna gain is estimated to be -7 dBi to achieve the 75% minimum coverage
outlined in Requirement NS3-COM-R003; this initial estimate is based on results from previous
missions. The system noise temperature is 28.84 dB, therefore the G/T for the spacecraft is
-38.04 dB/K.
The carrier power at the receiver is -95.8 dBm, whereas the noise power at the receiver is
-119.0 dBm. The measured sensitivity value of the receiver for a BER of 10-5 is -109 dBm,
which meets the -101.8 dBm receiver sensitivity required to achieve a 6 dB link margin on the
received signal power. The Ultra High Frequency (UHF) receiver bandwidth is 120 kHz, and
the information data rate is 4 kbps. With an implementation loss of 1 dB, this gives a frequency
modulation threshold margin of 10.15 dB. As the uplink system is a noncoherent link, the SNR
method must be used to capture effects from signal modulation; a frequency modulation of 3
dB (as measured with UHF receivers used on previous missions) provides a total margin of
13.15 dB. Therefore the NorSat-3 uplink system satisfies the required 6 dB margin stated in
requirement NS3-COM-R003.

Chapter 4. Link Budgets 34
Table 4.2: Uplink budget for Vardø ground station
Inputs Calculations UnitsFrequency 2032.965 MHzTransmit Power (mW) 50000 46.99 dBmAntenna Gain 36.025 dBiPointing Loss -0.14 dBRadome Transmission Loss 0.5 -0.50 dB
EIRP 82.38 dBm
Orbit Altitude 720 kmMaximum Distance to Satellite 2631 kmFree Space Loss -167.00 dBPolarization Mismatch Loss 1.0 -1.00 dBAtmospheric Loss 1.0 -1.00 dBTotal Propagation Loss -169.00 dB
Isotropic signal power at receiver -86.62 dBm
Antenna Gain -7.00 dBiFeed Harness Loss 1 -1.00 dBCombiner Loss 0.5 -0.50 dBFilter Loss 0.7 -0.70 dBSystem Noise Temperature (K) 765.0 28.84 dBK
G/T -38.04 dB/K
Receiver Signal Power -95.8 dBmReceiver Noise Power -119.0 dBmRequired Unit Sensitivity (6 dB Margin) -101.8 dBmUnit Sensitivity (10E-5 BER) -109.0 dBmC/No 73.94 dB/HzReceive Bandwidth 120 50.79 dBHzC/N 23.15 dBImplementation Losses 1 -1.00 dBC/N at Detector Input 22.15Frequency Modulation Improvement 3 3.00 dBReceived S/N 25.15 dB
Required S/N for 10E-5 BER 12 12.00 dB
Uplink Margin 13.15 dB

Chapter 4. Link Budgets 35
4.3 High Speed Uplink Budget
The high speed uplink budget for NorSat-3 is shown in Table 4.3. This is a secondary receiving
system for use during operations and for payload software updates. When the Vardø ground
station is used for high speed uplink, the transmitter power is 50 W (46.99 dBm) at an operating
frequency of 2032 MHz and the antenna gain is 36.03 dBi; the EIRP is therefore 82.38 dBm as
per Requirement NS3-COM-R004.
The same worst case satellite orbit altitude of 720 km and minimum elevation of 5◦ from the
uplink budget are used to calculate a maximum distance to the satellite of 2631 km, resulting
in a free space loss of 167 dB. A 1 dB polarization loss and 1 dB atmospheric loss are assumed,
resulting in a total propagation loss of 169 dB. The isotropic signal at the spacecraft is then
-86.62 dBm.
The receiving antenna gain is -1 dBi, as this results in a 6 dB reduction in the peak gain
of a patch antenna, which is roughly 5 dBi. This corresponds to essentially a quarter-power
beamwidth, an angle that will likely be much larger than the actual angle between the antenna
boresight and the ground station. The system noise temperature is 29.48 dBK; therefore the
G/T for the spacecraft is -33.48 dB/K.
The S-band receiver bandwidth is 180 kHz and the information data rate is 32 kbps. The
estimated sensitivity of the receiver for a BER of 10-5 is -103 dBm. With an implementation
loss of 1 dB, this gives a frequency modulation threshold margin of 12.94 dB. As with the uplink
system, the high speed uplink system is a noncoherent link, and therefore uses the SNR method
to capture effects of signal modulation. The frequency modulation improvement is assumed to
be 0 dB as this is a new component which does not yet have test results, providing a total
uplink margin of 12.94 dB. Communication systems with no flight heritage call for a significant
link margin, typically 12 dB. Comparing the high speed uplink margin to the desired 12 dB
link margin shows that the high speed uplink system meets link margin requirements.
4.4 Power Flux Density
Power Flux Density (PFD) is an important parameter in space communications due to the
limited bandwidth available for communication, and the large number of communication links
established between satellites and ground stations. Link performance is improved by increasing
the power of the transmitted signal, however high power signals can overpower transmissions
from other satellites that are close in frequency, thus reducing the performance of these links.
The International Telecommunications Union (ITU) established limitations in satellite PFDs
to mitigate this issue, and allow more satellites to communicate with ground stations. These
PFD guidelines establish an upper limit to the strength of the satellite downlink, and must be
folded into the design along with the link margins.

Chapter 4. Link Budgets 36
Table 4.3: High speed uplink budget for Vardø ground station
Inputs Calculations UnitsFrequency 2032 MHzTransmit Power (mW) 50000 46.99 dBmAntenna Gain 36.025 dBiPointing Loss -0.14 dBRadome Transmission Loss 0.5 -0.50 dB
EIRP 82.38 dBm
Orbit Altitude 720 kmMaximum Distance to Satellite 2631 kmFree Space Loss -167.00 dBPolarization Mismatch Loss 1.0 -1.00 dBAtmospheric Loss 1.0 -1.00 dBTotal Propagation Loss -169.00 dB
Isotropic signal power at receiver -86.62 dBm
Antenna Gain -1.00 dBiFeed Harness Loss 1 -1.00 dBCombiner Loss 0.0 0.00 dBFilter Loss 2.0 -2.00 dBSystem Noise Temperature (K) 887.0 29.48 dBK
G/T -34.44 dB/K
Receiver Signal Power -90.6 dBmReceiver Noise Power -116.6 dBmRequired Unit Sensitivity (6 dB Margin) -96.6 dBmUnit Sensitivity (10E-5 BER) -103.0 dBmC/No 78.49 dB/HzReceive Bandwidth 180 52.55 dBHzC/N 25.94 dBImplementation Losses 1 -1.00 dBC/N at Detector Input 24.94Frequency Modulation Improvement 0 0.00 dBReceived S/N 24.94 dB
Required S/N for 10E-5 BER 12 12.00 dB
High Speed Uplink Margin 12.94 dB

Chapter 4. Link Budgets 37
In this analysis, the worst case PFD occurs under different conditions than the worst case
link margin. As the ITU sets a ceiling on the PFD for the spacecraft, the analysis must use
values for the maximum transmission power; for NorSat-3, this means that the downlink filter
is assumed not to be required, the transmitter is operating at a maximum power output of 27.7
dB at the boresight of the downlink antenna, and the transmitted power is concentrated in the
signal bandwidth. This results in a peak EIRP, PP , calculated with (4.14). GP is the peak
antenna gain, PT is the maximum transmit power, LC,T is the feed loss, and B is the minimum
bandwidth.
PP =PT LC,T GP
B(4.14)
The worst-case minimum bandwidth is equivalent to the channel symbol rate R, which differs
from the information rate of the system through the coding rate; the coding rate describes the
number of bits which are used for error correction in a sequence of bits, and are not useful data.
A coding rate of x/y implies that there are a total of y bits generated for x bits of data, of
which y-x bits are used solely for error correction. The information data rate is therefore the
data rate of the useful information, whereas the channel data rate is the rate of all of the data
including error correction bits. The relationship between information data rate RI , coding rate
r, and channel data rate R is shown in (4.15).
R =RIr
(4.15)
A summary of the minimum PFD margins in dB for NorSat-3 can be found in Table 4.4,
where the difference in signal strength between Binary Phase Shift Keying (BPSK) and Quadra-
ture Phase Shift Keying (QPSK) has a clear effect on the allowable data rates. If the selected
orbit is less than 600 km in altitude, the lowest allowable data rate is 256 kbps BPSK; for
orbits 600 km or above, the lowest allowable data rate is 128 kbps BPSK. Discussions with
the customer indicate that the desired orbit orbit altitude is 600 km, therefore the designs and
analysis presented will focus on a 600 km orbit, but will be designed to operate for the required
range of orbits. As mentioned in Section 3.5, the Acquisition Mode of the downlink system
will operate at the lowest allowable data rate of the transmitter, which is established through
the PFD analysis to be 128 kbps BPSK. Similarly, the Payload Data Downlink Mode will be
limited to operating at or above 256 kbps QPSK.
4.5 Downlink Budget
The downlink budget for NorSat-3 is shown in Table 4.5. This is the only method for NorSat-3
to communicate with the ground, and is therefore a mission critical link. The downlink budget
is summarized for the minimum acquisition bitrate established with the PFD analysis, as the
operational payload downlink bitrate will vary. The output power of the on-board transmitter

Chapter 4. Link Budgets 38
Table 4.4: Power flux density margins (displayed in dB)
Modulation BPSK QPSK
Orbit Altitude [km] 550 600 650 700 720 550 600 650 700 720
32 -6.6 -5.8 -5.1 -4.5 -4.2 -9.6 -8.8 -8.1 -7.5 -7.264 -3.5 -2.8 -2.1 -1.4 -1.2 -6.6 -5.8 -5.1 -4.5 -4.2128 -0.5 0.2 0.9 1.6 1.8 -3.5 -2.8 -2.1 -1.4 -1.2256 2.5 3.2 3.9 4.6 4.8 -0.5 0.2 0.9 1.6 1.8512 5.5 6.2 6.9 7.6 7.8 2.5 3.2 3.9 4.6 4.81024 8.5 9.3 10.0 10.6 10.8 5.5 6.2 6.9 7.6 7.8
Data Rate (kbps)
2048 11.5 12.3 13.0 13.6 13.8 8.5 9.3 10.0 10.6 10.8
is 589 mW (27.7 dBm) at the operating frequency of 2213 MHz and the antenna gain is assumed
to be -7 dBi (a conservative estimate based on the 75% minimum coverage required and results
from previous missions), giving an EIRP of 19.50 dBm.
A worst case satellite orbit altitude of 720 km (assuming a circular orbit) and a minimum
elevation of 5◦ of are used to calculate a maximum distance to the satellite of 2631 km, resulting
in a free space loss of 167.74 dB. A 1 dB polarization loss and 1 dB atmospheric loss are
assumed, providing a total propagation loss of 169.74 dB. The isotropic signal at the ground
station antenna input is then -150.24 dBm.
The gain of the antenna at the Vardø ground station is 36.8 dBi, and the G/T of the ground
station has been measured as 14.72 dB/K. With an estimated pointing loss of 0.16 dB, a system
noise temperature of 21.41 dBK, and a radome transmission loss of 0.5 dB, the receiver signal
power is therefore -114.1 dBm.
The downlink system uses a coherent link, and as such uses the Eb/N0 method. For an
information data rate of 128 kbps with BPSK modulation at a coding rate of 0.5, the link has
a margin of 6.51 dB. This meets the required 6 dB downlink margin value from requirement
NS3-COM-R003.
4.6 Requirement Verification Matrix
As shown in Table 4.6, the link budgets created for NorSat-3 satisfy all relevant requirements.
However, this is dependant on the accuracy of the numbers used in the link budget, and therefore
the assumptions used in the link budgets require validation through hardware testing. Values
to be verified are the feed losses and filter losses, as well as the coverage about the spacecraft
for the selected antenna gain values.

Chapter 4. Link Budgets 39
Table 4.5: Downlink budget for Vardø ground station
Inputs Calculations UnitsFrequency 2213 MHzTransmit Power (mW) 589.00 27.70 dBmFeed Harness Loss 0.7 -0.70 dBFilter Loss 0.5 -0.50 dBAntenna Downlink Gain -7.00 dBi
EIRP 19.50 dBm
Orbit Altitude 720 kmMaximum Distance to Satellite 2631 kmFree Space Loss -167.74 dBPolarization Mismatch Loss 1.0 -1.00 dBAtmospheric Loss 1.0 -1.00 dBTotal Propagation Loss -169.74 dB
Isotropic signal power at receiver -150.24 dBm
Antenna Peak Gain 36.80 dBiPointing Loss -0.16 dBRadome transmission loss 0.5 -0.50 dBFeed harness loss 0 0.00 dBFilter/Diplexer loss 0 0.00 dBSystem Noise temp (K) 138.5 21.41 dBK
G/T 14.72 dB/K
Receiver Signal Power -114.1 dBmReceiver Noise Power -123.1 dBmSensitivity -120.6 dBmC/No 63.08 dB/HzInformation Data Rate 128 kbpsCoding Type ConvolutionalCoding Rate 0.5Channel Data Rate 256 kbpsModulation Type BPSKModulation Order 1 bps/spsChannel Symbol Rate 256 KspsOccupied Bandwidth (Null-to-null) 512 KHzC/N 9.00 dBImplementation Losses 1 -1.00 dBEs/No 8.00 dB
Eb/No 11.01 dB
Required Eb/No for 10E-5 BER 9.60 dBCoding Gain 5.10 dBCoded Required Eb/No for10E-5 BER 4.50 dB
Downlink Margin 6.51 dB

Chapter 4. Link Budgets 40
Table 4.6: Link budget requirements verification matrix
RequirementNumber
Requirement Compliance VerificationStatus
NS3-COM-R001 RF communications for command,telemetry, and downlink of payload databetween the ground station and satelliteshall utilize the S-band.
Compliant Verifiedthroughdesign
NS3-COM-R003 Command and telemetry link margins(uplink and downlink) shall be no lessthan 6 dB with a minimum coverage of75% about the spacecraft, at a minimumelevation angle of 5 degrees.
Compliant Verifiedthroughanalysis(testing isstill required)
NS3-COM-R004 All link analysis shall use the follow-ing ground station parameters: Vardø(Primary), EIRP = 82.38 dBm, G/T =14.72 dB/K; Svalbard (Back-up), EIRP= 79.37 dBm, G/T = 12.40 dB/K
Compliant Verifiedthroughdesign
NS3-COM-R005 The spacecraft shall include a commandreceiver with flight heritage.
Compliant Verifiedthroughdesign
NS3-SYS-R001 The spacecraft shall be designed to oper-ate in any high inclination orbit with analtitude between 550 and 720 km.
Compliant Verifiedthroughanalysis
NS3-SYS-R022 The spacecraft shall be designed to usea single ground station located in Vardø,Norway.
Compliant Verifiedthroughdesign

Chapter 5
Bus Antenna Considerations
The downlink, uplink, and high speed uplink systems are the only means of communication
between the spacecraft and the ground station, thus it is imperative that these links perform
as desired. Each of the components in these systems undergoes extensive performance testing;
the main source of uncertainty within these links are the transmission and reception of signals
through the bus antennas. This is due to the orientation of the satellite with respect to the
ground station, which will be constantly changing as the spacecraft will be performing different
slew profiles for each orbit, or in the case of tumbling, will be in a completely unknown attitude.
As such, the bus antennas must show a high spherical gain coverage and be placed in an optimal
position for the links to occur while the spacecraft is performing payload operations over the
target area. The requirements pertaining to the NorSat-3 bus antennas are found in Table 5.1.
NorSat-3 uses probe-fed patch antennas which have been designed by the Space Flight Lab-
oratory (SFL). These antennas use Right Hand Circular Polarization (RHCP), high efficiency,
and a broad beam, with flight heritage on multiple SFL satellites. An example of an S-band
patch antenna used on NorSat-3 is shown in Figure 5.1. When multiple antennas are used with a
single transmitter or receiver, they form an antenna array. Individually these antennas provide
hemispherical coverage about the antenna boresight, so two antennas are mounted on opposite
sides of the spacecraft to achieve spherical gain coverage. As these antennas are mounted on
opposite faces, their corresponding boresights are collinear and opposing, forming a line which
represents the antenna array boresight regardless of direction.
5.1 Bus Antenna Positioning
The external layout of NorSat-3 can be seen in Figure 5.2, which includes two drag sails, a Global
Positioning System (GPS) antenna, and a star tracker on the +Z face. The GPS antenna must
be roughly zenith (local vertical) pointing to achieve adequate performance according to an
analysis completed in [24]. The star tracker requires a similar angle to avoid obstructions from
the Earth and Sun during operation, which was established with the analysis completed in
[25]. The area containing the star tracker, GPS antenna, and drag sails can detrimentally affect
41

Chapter 5. Bus Antenna Considerations 42
Table 5.1: Bus antenna requirements
RequirementNumber
Requirement
NS3-COM-R001 Radio Frequency (RF) communications for command, telemetry, anddownlink of payload data between the ground station and satellite shallutilize the S-band.
NS3-COM-R003 Command and telemetry link margins (uplink and downlink) shall be noless than 6 dB with a minimum coverage of 75% about the spacecraft, ata minimum elevation angle of 5 degrees.
NS3-COM-R004 All link analysis shall use the following ground station parameters: Vardø(Primary), EIRP = 82.38 dBm, G/T = 14.72 dB/K; Svalbard (Back-up),EIRP = 79.37 dBm, G/T = 12.40 dB/K
NS3-COM-R006 The uplink data rate shall support uplink of 20 MB over 24h using Vardøground station, given nominal operating conditions.
NS3-COM-R007 The downlink data rate shall support downlink of 500 MB over 24h usingVardø ground station, given nominal operating conditions.
NS3-SYS-R001 The spacecraft shall be designed to operate in any high inclination orbitwith an altitude between 550 and 720 km.
Figure 5.1: Example of the SFL S-band patch antenna

Chapter 5. Bus Antenna Considerations 43
1. Drag Sails2. Star Tracker3. GPS Antenna
11
23
4. +Z Mezzanine5. NRD Panel
4
5
Figure 5.2: The external layout of NorSat-3 used for antenna simulations
the performance of the antennas due to the close proximity of the objects, however there is
unoccupied space at the top of the +Z mezzanine which can be used to mount antennas. As
per a request from the customer the -Z face of the Navigation Radar Detector (NRD) panel
is not displayed as it contains the payload NRD antenna array, although there are unoccupied
areas on the panel which can hold external features. The +Y and -Y faces are largely populated
solar cells, and while the -Y face contains space to mount external objects with an unobstructed
view, the +Y face does not. The +X and -X faces have unoccupied areas to install antennas,
however the NRD panel would obstruct the view of the antennas. Antennas may be placed on
the NRD panel perpendicularly to the Z axis on brackets which would be situated at the edge
of the panel, resulting in unobstructed views but much more extreme thermal conditions.
NorSat-3 will be measuring data over the target area shown in Figure 5.3. While in view of
this target area, which includes both ground stations, NorSat-3 will be in an attitude that is
constrained to have the the NRD boresight (the spacecraft -Z vector) pointed 5◦ below Earth’s
horizon while rotating about the nadir vector (the vector pointing from the spacecraft to the
centre of mass of the Earth). This attitude profile is shown in Figure 5.4, and has a large
bearing on the placement of the bus antennas; the bus antennas must be positioned such that
they allow NorSat-3 to meet uplink and downlink requirements while the spacecraft is rotating
in an arbitrary slew when in view of the ground station.
Three bus antenna configurations were considered to maximize antenna performance based
on the expected attitude profiles, with array boresights pointing along the following vectors:
1. Spacecraft Z vector. The spacecraft -Z vector will always point towards the target area
during operations, however, this does not mean that the -Z vector will be pointing towards
a ground station.
2. Local vertical vector (roughly 60◦ from the -Z axis towards the -Y axis about the -X
axis). The spacecraft rotates about this vector while slewing, so the antennas will have
an approximately constant gain while rotating about the boresight vector.

Chapter 5. Bus Antenna Considerations 44
Figure 5.3: The target area for gathering navigation radar data with NorSat-3
Figure 5.4: The attitude NorSat-3 will be in while gathering navigation radar data

Chapter 5. Bus Antenna Considerations 45
3. Spacecraft Y vector. Due to the constrained attitude and slewing NorSat-3 will complete,
it is possible that the -Y axis points towards the ground stations more than the -Z axis
does.
The antenna pattern will remain very similar in these three orientations if the antennas are
installed in a manner that leaves them unobstructed, so it becomes important to examine other
differences in performance between these options. Of the requirements listed in Table 5.1, the
performance metric that would vary the most between these configurations is the downlink data
rate, and therefore the downlink data throughput. To determine the difference in performance
for the downlink data rate, the data throughputs of the three options were compared with an
analysis using Systems Toolkit (STK). STK can create realistic and detailed communication
links for satellites with information from the link budgets. A representative attitude simulation
of NorSat-3 for the baseline 600 km orbit altitude created by the attitude determination and
control subsystem engineer was updated with the parameters found in the link budgets as well
as a simulated antenna pattern consisting of two downlink patch antennas. This scenario was
used to find an initial estimate for the data throughput of a typical day of operation for NorSat-
3 to compare the three potential bus antenna orientations, and a more rigorous analysis follows
in Section 5.3. A minimum margin constraint was used to examine the data throughput for
Vardø ground station and Svalbard ground station with a minimum 6 dB margin.
The downlink system in NorSat-3 has a variable data rate: each data rate is greater than
the previous data rate by a factor of two, producing a decrease of 3 dB in the Bit-Energy-to-
Noise-Density-Ratio (Eb/N0) of the signal. To model this in STK it is necessary to include a
minimum and a maximum link margin constraint, and a minimum elevation angle constraint.
The data begins transmission with the lowest data rate of interest when the minimum margin is
reached and stops transmission when the maximum margin is reached. The maximum margin
must be 3 dB greater than the minimum margin, and reaching this implies that the data rate
will be increased. This increase in the data rate reduces the link margin by 3 dB, placing
the margin at the lower band of the acceptable margin, and when the maximum margin is
reached the data rate is increased once again. At the highest data rate the maximum data rate
is removed and the data will be transmitted at this data rate until the minimum margin is
reached. The data rate is then lowered, and the process repeated until the satellite is no longer
in view of the ground station. For the 6 dB margin cases examined the minimum margin is 6
dB and the maximum margin is 9 dB for each data rate. Finding the access times for each data
rate provides an overall data throughout in an operating period, as summarized in Table 5.2.
It is clear through comparison that mounting the S-band patch antennas on the +Z mez-
zanine and the -Z face of the NRD panel provides a higher downlink data throughput. As the
uplink and downlink antenna boresights should always be parallel to ensure that both uplink
and downlink communication may be established together between the ground station and the
satellite, the uplink patch antennas shall also be mounted on the +Z mezzanine and the -Z face
of the NRD panel, while the single high speed uplink patch antenna shall be mounted on the -Z

Chapter 5. Bus Antenna Considerations 46
Table 5.2: Data throughput analysis for downlink antennas in various configurations
Array Boresight Ground Station Data Throughput [MB/Day]
Spacecraft Z axis Vardø 583.1
Spacecraft Z axis Svalbard 846.8
Local vertical Vardø 625.0
Local vertical Svalbard 594.5
Spacecraft Y axis Vardø 370.1
Spacecraft Y axis Svalbard 341.8
Table 5.3: Data throughput analysis for the uplink system
Ground Station Data Throughput [MB/Day]
Vardø 2.9
Svalbard 3.8
face of the NRD panel, as this face will always point towards the target area when it is in view.
The uplink and high speed uplink systems have fixed data rates, and therefore only require a
minimum margin constraint for each case. The data throughput for the uplink system is found
in Table 5.3, and the data throughput for the high speed uplink system is found in Table 5.4.
It is also important to note that the high speed uplink data throughput and the downlink
data throughput found through this analysis is compliant with the 20 MB uplink and 500 MB
downlink specified in requirements NS3-COM-R006 and NS3-COM-R007, although this high
level analysis does not take into account link inefficiencies, which will be examined in Chapter
5.3.
The placement of the bus antennas on NorSat-3 is shown in Figure 5.5, where the two
patches used for the uplink system are in blue, the two patches used in the downlink system
are in green, and the patch used on the high speed uplink system is in red.
5.2 Simulated Bus Antenna Performance
The bus antennas on the NorSat-3 model were simulated using High Frequency Structure Sim-
ulator (HFSS) to examine their RHCP gain pattern, input return loss, and isolation from other
antennas. Isolation and input return loss were examined over a frequency span of 50 MHz
centred on the operating frequency of the links, referred to in this section as the frequency
range of the antennas.
Table 5.4: Data throughput analysis for the high speed uplink system
Ground Station Data Throughput [MB/Day]
Vardø 23.8
Svalbard 30.0

Chapter 5. Bus Antenna Considerations 47
Figure 5.5: The S-band patch antennas mounted on NorSat-3
5.2.1 Uplink Antennas
The principal requirement for the uplink system is broad gain coverage, quantified by a percent-
age of the total omni-directional sphere with RHCP gain above the desired threshold gain. Four
planes of the simulated RHCP antenna gain pattern for the uplink antenna array are shown in
Figure 5.6. The simulated RHCP coverage for various gain threshold values is summarized in
Figure 5.7. At -7 dBi, the antenna gain value used in the uplink budget, the antennas provide
85.9% spherical coverage and therefore meet the 75% spherical coverage requirement.
The simulated input return losses of the uplink antennas as well as the isolation between the
uplink and downlink antenna arrays over the uplink frequency range on the NorSat-3 structure
is shown in Figure 5.8. The uplink antennas mounted on the +Z mezzanine and the -Z face
of the NRD panel have simulated input return losses at the uplink operational frequency of
-25.5 dB and -28.1 dB respectively, assuring high power throughput. The uplink antenna array
has a maximum (worst-case) simulated isolation to the downlink antenna array of -27.7 dB
over the uplink frequency range. The Ultra High Frequency (UHF) receiver used in the uplink
system has a required sensitivity of -101.8 dBm to achieve a 6 dB uplink margin, and at the
uplink frequency the transmitter has an output power of -78.5 dBm. Therefore, an isolation
of at least -23.3 dB is necessary between the uplink and downlink antennas over the uplink
frequency range to reduce the transmitter output power to below the required sensitivity level
of the UHF receiver. The simulated isolation is significantly lower than the required isolation,
thus guaranteeing that the downlink signal will not overpower the uplink signal.

Chapter 5. Bus Antenna Considerations 48
-50-40-30-20-10
010
0o Elevation Plane45o Elevation Plane90o Elevation Plane
135o Elevation Plane
-180o
-120o
-60o
0o
60o
120o
RHC
P G
ain
(dBi
)
Azimuth Angle
Figure 5.6: Uplink system S-band patch antenna array RHCP gain
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
-11 -6 -1 4
Sp
her
ical
Cova
erag
e
Gain Threshold (dBi)
Figure 5.7: Spherical coverage at various gain thresholds for the uplink system S-band patchantenna array RHCP gain

Chapter 5. Bus Antenna Considerations 49
-40
-30
-20
-10
0
2.007 2.017 2.027 2.037 2.047 2.057
Mag
nit
ud
e (d
B)
Frequency (GHz)
Uplink +Z Antenna Return Loss Uplink -Z Antenna Return LossUplink - Downlink Isolation Required Input Return LossRequired Isolation
Figure 5.8: Uplink antenna array input return losses and isolation over the uplink frequencyrange
5.2.2 High Speed Uplink Antenna
The high speed uplink system will use the same patch antenna as the uplink system, because the
operating frequencies of the two systems are very close and the antennas have a wide operating
band. The high speed S-band uplink system is not subject to the 75% spherical coverage
requirements as it is not critical to the operation of the satellite. It is more meaningful to
examine the half-power beamwidth of the antenna, the worst case of which is 89◦ for the high
speed uplink antenna. This means that the high speed uplink antenna has a gain that is at
least half of the maximum gain for a cone of 89◦, which allows communication with the ground
station even while the satellite performs large angle attitude slews. Four planes of the simulated
RHCP antenna pattern for the high speed uplink antenna are shown in Figure 5.9.
The simulated input return loss of the high speed uplink antenna and the isolation between
the high speed uplink antenna and the downlink antenna array over the high speed uplink
frequency range on the NorSat-3 structure are found in Figure 5.10. The high speed uplink
antenna, mounted on the -Z face of the NRD panel, has a simulated input return loss at the high
speed uplink operational frequency of -24.5 dB, thus ensuring that only a very small portion of
the signal power will be lost due to reflections at the input port of the antenna. The high speed
uplink antenna has a simulated maximum isolation to the downlink antenna array of -43.4 dB
over the high speed uplink frequency range. The transmitter has an output power of -78.7
dBm at the high speed uplink operating frequency, while the S-band receiver has a required
sensitivity of -102.6 dBm to achieve a 6 dB high speed uplink margin. This leads to a required

Chapter 5. Bus Antenna Considerations 50
-50-40-30-20-10
010
0o Elevation Plane45o Elevation Plane90o Elevation Plane
135o Elevation Plane
-180o
-120o
-60o
0o
60o
120o
RHC
P G
ain
(dBi
)
Azimuth Angle
Figure 5.9: High speed uplink system S-band patch antenna RHCP gain
isolation of -23.9 dB between the high speed uplink and S-band downlink antennas, which is
met with significant margin by the simulated isolation.
5.2.3 Downlink Antennas
Similar to the uplink antennas, the principal requirement for the downlink antennas is broad
gain coverage, quantified by a percentage of the total omni-directional spherical coverage above
the desired threshold gain. Figure 5.11 shows four planes of the simulated RHCP antenna
pattern for the S-band downlink antennas mounted on the NorSat-3 structure.
The simulated coverage of the S-band downlink antennas for various gain threshold values
is summarized in Figure 5.12. At -7 dBi, the antenna gain value used in the downlink budget,
the antennas provide 80.7% spherical coverage and therefore meet the 75% spherical coverage
requirement.
The simulated input return losses of the downlink antennas as well as the isolation between
the uplink and downlink antenna arrays and the high speed uplink and downlink antennas over
the downlink frequency range on the NorSat-3 structure are displayed in Figure 5.13. The
downlink antennas mounted on the +Z mezzanine and the -Z face of the NRD panel have
simulated input return losses at the downlink operational frequency of -19.9 dB and -19.8 dB
respectively. The low return losses of both antennas ensures that only a small portion of the
power sent from the transmitter will be reflected back to the transmitter, which is especially
important as a high amount of reflected power can damage the transmitter. The downlink

Chapter 5. Bus Antenna Considerations 51
-50
-40
-30
-20
-10
0
2.006 2.016 2.026 2.036 2.046 2.056
Mag
nit
ud
e (d
B)
Frequency (GHz)
High Speed Uplink Return Loss High Speed Uplink - Downlink Isolation
Required Input Return Loss Required Isolation
Figure 5.10: High speed uplink antenna input return loss and isolation over the high speeduplink frequency range
-50
-40
-30
-20
-10
0
10
0o Elevation Plane45o Elevation Plane90o Elevation Plane
135o Elevation Plane
-180o
-120o
-60o
0o
60o
120o
RHC
P G
ain
(dBi
)
Azimuth Angle
Figure 5.11: Downlink system S-band patch antenna array RHCP gain

Chapter 5. Bus Antenna Considerations 52
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
-11 -6 -1 4
Sp
her
ical
Cova
erag
e
Gain Threshold (dBi)
Figure 5.12: Spherical coverage at various gain thresholds for the downlink system S-band patchantenna array RHCP gain
antenna array has a maximum simulated isolation of -34.8 dB with the uplink antenna array and
-44.5 dB with the high speed uplink antenna over the downlink frequency range. These isolation
values provide greater isolation than the output power of the transmitter at the downlink
operational frequency range, which eliminates the risk of damage to the receivers from the high
power downlink signal. The filters included in the receiver chains will further attenuate the
downlink signals, such that the receivers will not be damaged by the transmitter.
5.3 Detailed Data Throughput Analysis
The information found in Table 5.2 is useful for an initial estimate, but there are effects which
are not taken into account in the STK simulation: dropped packets, the time it takes to
establish a connection, and data overhead. These considerations can be applied to the same STK
simulation used in the original data throughput model, with the updated antenna performance
and positioning.
Every link between NorSat-3 and the ground station will have a small length of time associ-
ated with establishing the connection due to latency, processing time, and the amount of time
spent turning on or reconfiguring the transmitter. This amount of time is assumed to occur
every time the satellite and ground station reconnect and is subtracted from the total access
time.
The number of dropped packets is estimated through the Bit Error Rate (BER) of the link;
NorSat-3 uses a BER of 10-5 for all communication links, indicating that approximately 1 bit
in every 100000 bits will be erroneous. Applying this BER to all data exchanges yields the

Chapter 5. Bus Antenna Considerations 53
-50
-40
-30
-20
-10
0
2.188 2.198 2.208 2.218 2.228 2.238
Mag
nit
ud
e (d
B)
Frequency (GHz)
Downlink +Z Antenna Return Loss Downlink -Z Antenna Return LossDownlink - Uplink Isolation Downlink - High Speed Uplink IsolationRequired Input Return Loss Required Uplink IsolationRequired High Speed Uplink Isolation
Figure 5.13: Downlink antenna array input return losses and isolation over the downlink fre-quency range
amount of dropped or failed bits in the data. Each dropped bit results in a dropped packet,
therefore the BER can be used to find the number of dropped packets.
The overhead of each packet has two considerations: the Nanosatellite Protocol framing and
the High-level Data Link Control (HDLC) framing. The Nanosatellite Protocol is a robust pro-
tocol which enables point-to-point communication, and was developed for use on SFL satellites;
while the size of Nanosatellite Protocol packets can be varied, typical packets are 265 bytes, 9
bytes of which is overhead data [26]. An HDLC framing is used to encode the Nanosatellite
Protocol packets when sending them over radio links. The HDLC protocol adds a framing byte
at the beginning and ending of the packet, a 2 byte HDLC address, and a 2 byte HDLC cyclic
redundancy check [26]. All information within the framing bytes of the packet are subject to bit
stuffing, in which bits are inserted as necessary to protect the data from incorrect processing.
The maximum possible increase in packet size is 20%, and the minimum possible packet size
increase is 0%.
An important consideration for the downlink data throughput it is the lower limit from
limitations set by the Power Flux Density (PFD) guidelines, such that data throughput only
uses data rates at or above the minimum data rate. The numbers used in the data throughput
analysis are summarized in Table 5.5, where blue cells are variables and green cells are fixed
numbers. The results from applying this analysis to the NorSat-3 operational STK simulation
for the downlink, uplink, and high speed uplink systems are shown in Table 5.6, Table 5.7, and
Table 5.8 respectively. The most important case to look at for each link is a 6 dB link margin

Chapter 5. Bus Antenna Considerations 54
Table 5.5: NorSat-3 data throughput analysis parameters
Parameter Value Units
BER 1x10−5
Time spent establishing connection per contact 0.5 seconds
Average data size 256 Bytes
Packet size increase due to HDLC encoding 5% %
Packet overhead 28.45 Bytes
Data packet size 284.45 Bytes
Downlink PFD lower data rate limit 256 kbps
Orbits per day 14.89
with the Vardø ground station, as this is the required operational situation for NorSat-3. Under
these conditions, NorSat-3 has a downlink data throughput margin of 3%, and a high speed
uplink data throughput margin of 5%. The uplink system is not subject to a data throughput
requirement, but is capable of supporting the transfer of 2 MB over 24 hours with a 6 dB margin
for Vardø ground station. There is not a margin requirement on the data throughput, therefore
these margins are acceptable. This analysis proves that it is possible to achieve the downlink of
500 MB and uplink of 20 MB in periods of 24 hours in nominal operating conditions, as stated
in the requirements.
5.4 Requirement Verification Matrix
Table 5.9 shows the compliance of the bus antenna configuration to the relevant requirements.
The uplink, high speed uplink, and downlink antennas are all S-band patch antennas, therefore
the design is compliant with Requirement NS3-COM-R001 through design. The -7 dBi antenna
gain value used in the uplink and downlink budgets provides link margin values of over 6 dB
as well as a coverage of over 75% about the spacecraft for a minimum elevation of 5◦ and an
altitude of 720 km, thus the bus antenna design is compliant with requirements NS3-SYS-R001
and NS3-COM-R003 through analysis. The link budget uses the ground station parameters
outlined in Requirement NS3-SYS-R004, and as such is compliant through design. The realistic
data throughput analysis completed with the simulated antenna performance revealed that an
uplink of 20 MB over 24 hours, and a downlink of 500 MB over 24 hours are possible with the
selected configuration; therefore the design is compliant with Requirements NS3-COM-R006
and NS3-SYS-R007 through analysis.

Chapter 5. Bus Antenna Considerations 55
Table 5.6: Realistic downlink data throughput
Ground Station Vardø Svalbard
Fraction of time spent establishing connection in simulation 1.1% 0.8%
Average data throughput per orbit (from simulation) [MB] 39.2 56.9
Average data throughput per orbit corrected for time [MB] 39.1 56.8
Total number of packets transmitted per orbit 137553 199775
Dropped packets per orbit (from BER) 3131 4547
Received packets per orbit 134422 195228
Received data per orbit [MB] 38.2 55.5
Total data throughput per orbit (no overhead) [MB] 34.4 50.0
Total data throughput per day (no overhead) [MB] 512.5 744.3
Required data per day [MB] 500 500
Data Throughput Margin 3% 49%
Table 5.7: Realistic uplink data throughput
Ground Station Vardø Svalbard
Fraction of time spent establishing connection in simulation 0.1% 0.1%
Average data throughput per orbit (from simulation) [MB] 0.2 0.3
Average data throughput per orbit corrected for time [MB] 0.2 0.3
Total number of packets transmitted per orbit 702 886
Dropped packets per orbit (from BER) 16 21
Received packets per orbit 686 865
Received data per orbit [MB] 0.2 0.2
Total data throughput per orbit (no overhead) [MB] 0.2 0.2
Total data throughput per day (no overhead) [MB] 2.6 3.3
Table 5.8: Realistic high speed uplink data throughput
Ground Station Vardø Svalbard
Fraction of time spent establishing connection in simulation 0.1% 0.1%
Average data throughput per orbit (from simulation) [MB] 1.6 2.0
Average data throughput per orbit corrected for time [MB] 1.6 2.0
Total number of packets transmitted per orbit 5614 7087
Dropped packets per orbit (from BER) 128 162
Received packets per orbit 5486 6925
Received data per orbit [MB] 1.6 2.0
Total data throughput per orbit (no overhead) [MB] 1.4 1.8
Total data throughput per day (no overhead) [MB] 20.9 26.4
Required data per day [MB] 20 20
Data Throughput Margin 5% 32%

Chapter 5. Bus Antenna Considerations 56
Table 5.9: Bus antenna requirements verification matrix
RequirementNumber
Requirement Compliance VerificationStatus
NS3-COM-R001 RF communications for command,telemetry, and downlink of payload databetween the ground station and satelliteshall utilize the S-band.
Compliant Verifiedthroughdesign
NS3-COM-R003 Command and telemetry link margins(uplink and downlink) shall be no lessthan 6 dB with a minimum coverage of75% about the spacecraft, at a minimumelevation angle of 5 degrees.
Compliant Verifiedthroughanalysis
NS3-COM-R004 All link analysis shall use the follow-ing ground station parameters: Vardø(Primary), EIRP = 82.38 dBm, G/T =14.72 dB/K; Svalbard (Back-up), EIRP= 79.37 dBm, G/T = 12.40 dB/K
Compliant Verifiedthroughdesign
NS3-COM-R006 The uplink data rate shall support uplinkof 20 MB over 24h using Vardø groundstation, given nominal operating condi-tions.
Compliant Verifiedthroughanalysis
NS3-COM-R007 The downlink data rate shall supportdownlink of 500 MB over 24h using Vardøground station, given nominal operatingconditions.
Compliant Verifiedthroughanalysis
NS3-SYS-R001 The spacecraft shall be designed to oper-ate in any high inclination orbit with analtitude between 550 and 720 km.
Compliant Verifiedthroughanalysis

Chapter 6
Payload Antenna Considerations
6.1 Very High Frequency Payload Antenna Positioning
One of the two payloads of NorSat-3 is an Automatic Identification System (AIS) space receiver
which supports up to four antennas. The number of antennas on NorSat-3 must be minimized
to simplify design and deployment while also meeting all of the relevant requirements listed in
Table 6.1. Requirements NS3-SYS-R015 and NS3-SYS-R018 outline that NorSat-3 shall use
a qualified Space Flight Laboratory (SFL) satellite deployment system without requiring any
major modifications, so the antennas used for the AIS payload must have minimal impact on the
interfaces with the deployer. Further constraints on the design and positioning of these antennas
come from the inclusion of a Global Positioning System (GPS) antenna with requirement NS3-
STR-R006. Requirement NS3-STR-R003 stipulates that NorSat-3 must use a minimum of two
orthogonal AIS antennas mounted so as to provide maximum performance while gathering
Navigation Radar Detector (NRD) data.
AIS channels occupy a range extending from 156.025 MHz to 162.025 MHz, which falls in
the Very High Frequency (VHF) range. SFL has successfully used deployable λ/4 monopole
antennas for VHF frequencies on multiple missions, including NorSat-1 and NorSat-2, and shall
use this reliable design for NorSat-3. The positions considered for these deployable antennas
are limited to those which are compatible with the mechanical layout of the bus, and which
are compatible with the eXoadaptable PyrOless Deployer (XPOD) deployment system as per
Requirements NS3-SYS-R015 and NS3-SYS-R018.
6.1.1 Design Evaluation
The antennas were examined as a two port network using High Frequency Structure Simulator
(HFSS) software to determine the required length to achieve the desired centre frequency and
examine the overall performance based on the performance metrics described below.
Return Loss: The goal of this design is to have both antennas with a return loss of -13 dB or
lower (95% power throughput), but the maximum allowable return loss shall be -10 dB
57

Chapter 6. Payload Antenna Considerations 58
Table 6.1: AIS antenna requirements
RequirementNumber
Requirement
NS3-SYS-R015 The spacecraft dimensions, including appendages, shall be compatiblewith a qualified SFL satellite deployment system (XPOD Duo).
NS3-SYS-R018 The spacecraft should not require any major modifications to the selectedXPOD design.
NS3-STR-R003 A minimum of two AIS antennas shall be provided by SFL and mountedexternally. The antenna elements shall be mounted orthogonally, andsuch that AIS reception is optimised during NRD payload operations.
NS3-STR-R006 A GPS antenna shall be accommodated in a location that minimizesobstructions and maximizes performance during NRD payload operations.
(90% power throughput).
Spherical Gain Coverage: A high spherical gain coverage is desirable, as this implies that
the satellite is capable of receiving data from many directions. This is advantageous as
NorSat-3 is expected to operate and collect AIS data from many directions in a variety
of orientations.
Performance over Visible Earth: While the spherical gain coverage examines the perfor-
mance of the antenna over an entire sphere, it is also relevant to consider just the portion
of the sphere which is projected over the visible section of Earth. For this analysis, only
the nominal NRD operational attitude is considered, as this attitude will be used when
the spacecraft is in view of the target area. This attitude has the NRD antenna bore-
sight (spacecraft -Z axis) pointed 5◦ below Earth’s horizon. At an altitude of 720 km the
visible Earth covers a cone with a half-angle of 66◦. The antenna gain within this area
is an important metric for determining how well the antennas will perform during NRD
payload operations, as per requirement NS3-STR-R003.
Performance over NRD Field of View: The NRD antenna array field of view is a cone of
half-angle 5◦, therefore this area is of significant interest for gathering AIS data as well.
Mechanical Considerations: The performance of the antennas drives their layout but other
important design considerations are the ease of deployment and external layout. The final
AIS antenna layout should be one that is simple to deploy, and does not cause conflicts
with or obstruct any other components on the bus. This is driven by Requirements
NS3-SYS-R015, NS3-SYS-R018, NS3-STR-R006, and NS3-STR-R007.
6.1.2 Modelling
High-frequency electromagnetic field simulations were completed to determine the performance
metrics for the various antenna configurations. Each configuration uses the final model from the
bus antenna positioning analysis. The AIS antennas are added to the base model at different
locations and orientations in order to compare the different arrangements. Three configurations

Chapter 6. Payload Antenna Considerations 59
were considered, each containing two AIS antennas mounted to the spacecraft via an isolating
base. The antennas were given an initial length of 46 cm (approximately λ/4 for a frequency
of 162 MHz), and the lengths of the two antennas were iterated until their centre frequencies
matched at 162 MHz.
Installing the AIS antennas on the +X, -X, and +Y faces of NorSat-3 would provide poor
gain coverage and poor performance due to impingement on the antenna pattern by the NRD
panel. Fixing the antennas to the NRD panel itself is very difficult for deployment and thermal
purposes, and so was avoided to reduce complexity. One of the monopole antennas must be
mounted perpendicular to the Z axis for optimal performance around the NRD boresight; as the
+X, -X, and +Y directions are shadowed by the NRD panel, the -Y direction is the logical solu-
tion for an AIS monopole antenna. To remain perpendicular to the first monopole antenna, the
second antenna must be installed on the +Z mezzanine or -Z face of the NRD panel. However,
installing a monopole antenna on the -Z face of the NRD panel would affect the performance
of the NRD antenna array and as such is disregarded as a valid mounting location. The +Z
mezzanine becomes the desired mounting point for a second monopole antenna. Configurations
A and C use this layout, with the difference between them being the method of mounting the
antennas to the structure. An alternative layout in Configuration B uses solely the -Y face for
mounting the antennas, in which the antennas are perpendicular to each other, but are not
parallel to the -Y face normal. This is expected to allow both antennas to have high gain over
the NRD field of view, however the each antennas will be shadowed by the spacecraft bus in
similar areas. The AIS antennas are shown in dark grey in the images displayed.
Configuration A: As shown in Figure 6.1, both antennas are mounted on the +Z face. AIS
antenna 1 is aligned with the spacecraft Z axis and AIS antenna 2 is aligned with the
spacecraft -Y axis.
Configuration B: The mounting of the AIS antennas is in Figure 6.2. Both antennas are
mounted on the -Y face of the spacecraft. AIS antenna 1 is right-hand rotated 45◦ about
the spacecraft +Z axis from the spacecraft -Y axis, while AIS antenna 2 is right-hand
rotated −45◦ about the spacecraft +Z axis from the spacecraft -Y axis.
Configuration C: Figure 6.3 presents the layout of the AIS antennas. AIS antenna 1 is
mounted on the +Z mezzanine and aligned with the spacecraft +Z axis and AIS antenna
2 is mounted on the -Y face and aligned with the spacecraft -Y axis.
6.1.3 Design Comparison
The simulated results for the return loss, average gain over visible Earth, and average gain over
the NRD field of view for the three configurations are summarized in Table 6.2. Configuration A
and C perform extremely well and have nearly identical results, with configuration A providing
slightly better values for return loss. Configuration B provides very low input return losses,
but poor gain over visible Earth and the NRD boresight. Antenna 1 in configurations A and
C have low average gain over the NRD field of view, but this is acceptable as antenna 2 in

Chapter 6. Payload Antenna Considerations 60
Figure 6.1: AIS antenna configuration A
Figure 6.2: AIS antenna configuration B

Chapter 6. Payload Antenna Considerations 61
Figure 6.3: AIS antenna configuration C
both orientations provides very high gain over the NRD field of view. Antenna 1 is mounted
orthogonally to antenna 2 for these configurations, thus antenna 1 performs well around the
nulls of antenna 2, providing more spherical coverage about the spacecraft.
The individual spherical gain coverage of each antenna can be used to find the total com-
bined coverage of the two antennas, displayed in Figure 6.4 for a range of gain thresholds.
Configurations A and C have very similar performance, although configuration C has a higher
coverage. Configuration B has poor coverage due to both antennas being impinged upon by
the spacecraft.
The AIS antennas will be constrained by the XPOD through tie-down points before and
during launch, and will be deployed upon release from the XPOD. Due to the proximity of the
Table 6.2: Simulated AIS antenna performance results
Parameter Config. A Config. B Config. C
Antenna 1 return loss [dB] -14.5 -31.0 -13.1
Antenna 2 return loss [dB] -26.9 -32.3 -26.3
Antenna 1 average gain, visible Earth [dB] -2.8 -6.6 -2.8
Antenna 2 average gain, visible Earth [dB] -4.3 -6.6 -4.3
Antenna 1 average gain, NRD field of view [dB] -42.8 -1.0 -42.8
Antenna 2 average gain, NRD field of view [dB] 3.3 -1.0 3.3

Chapter 6. Payload Antenna Considerations 62
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
-15 -10 -5 0 5
Cove
rage
Gain Threshold [dBi]
Configuration A Configuration B Configuration C
Figure 6.4: Combined spherical gain coverage for various antenna configurations
antennas in configurations A and C, the AIS antennas can be deployed with a single tie-down
point, allowing for a very simple design. Configuration B requires the AIS antennas to be folded
along the +X and -X panels and special design considerations must be made for the antennas
to be compatible with the XPOD system, making configuration B a poor design choice.
6.1.4 Design Selection
Configuration C provides excellent overall performance and avoids the need for two different
antenna mounting bases, as are required in configuration A. Therefore, configuration C has been
selected as the layout of the AIS antennas on NorSat-3. Table 6.3 summarizes the compliance
of the AIS antenna layout to the relevant requirements.
6.2 Downlink and Navigation Radar Detector Coupling
The NRD payload on NorSat-3 is a sensitive receiver and applies strict limitations on the noise
generated by the satellite over the NRD frequency range, as summarized in Table 6.4. While
there are multiple sources of emitted power on the spacecraft from electronic components, the
transmitter is the dominating source of power and must therefore be examined in depth.
6.2.1 Generated Noise
An S-band transmitter was connected to a spectrum analyser to characterize the power spectral
density of the transmitter, however the output power was below the noise floor of the spectrum

Chapter 6. Payload Antenna Considerations 63
Table 6.3: AIS antenna positioning requirements verification matrix
RequirementNumber
Requirement Compliance VerificationStatus
NS3-SYS-R015 The spacecraft dimensions, including ap-pendages, shall be compatible with aqualified SFL satellite deployment sys-tem (XPOD Duo).
Compliant Verifiedthroughdesign
NS3-SYS-R018 The spacecraft should not require anymajor modifications to the selectedXPOD design.
Compliant Verifiedthroughdesign
NS3-STR-R003 A minimum of two AIS antennas shall beprovided by SFL and mounted externally.The antenna elements shall be mountedorthogonally, and such that AIS recep-tion is optimised during NRD payloadoperations.
Compliant Verifiedthroughdesign
NS3-STR-R006 A GPS antenna shall be accommodatedin a location that minimizes obstructionsand maximizes performance during NRDpayload operations.
Compliant Verifiedthroughdesign
analyser and could not be measured. The noise floor of the spectrum analyser was -141.2
dBm/Hz, while the cable assembly had a loss of -11 dB at the NRD frequency. This implies
that the transmitter has a noise output that is at least as low as -130.2 dBm/Hz, but the true
output can only be found with a spectrum analyser that has a lower noise threshold. There are
no estimates on the isolation between the downlink antenna array and the NRD antenna array
as the NRD antenna elements proved to be too complex to analyse on available computers.
Therefore, the design must include a low pass filter until the output power of the transmitter is
confirmed to be low enough, or the downlink array to NRD antenna array isolation is confirmed
to be high enough such that filtering is not necessary. At least 45 dB of attenuation is required
at the NRD operating frequency range to achieve the required -175 dBm/Hz with certainty,
assuming that the isolation between the downlink array and NRD antenna array is 0 dB. This
is a very conservative estimate as there will be some isolation between the two antennas, but
using a filter strong enough to attenuate all of the noise potentially generated by the transmitter
ensures that the requirement will be met even if the isolation between the antenna arrays is
low.
6.2.2 Blocking Levels
The NRD receiver used on NorSat-3 has been designed concurrently with the NorSat-3 space-
craft, and therefore there are considerations for the performance of the bus in the design of the
NRD payload. The NRD payload will accommodate an absolute emission of 27 dBm at any

Chapter 6. Payload Antenna Considerations 64
Table 6.4: Downlink to NRD coupling requirements
RequirementNumber
Requirement
NS3-SYS-R012 The spacecraft platform shall limit platform generated noise at the inputto the NRD payload to -175 dBm/Hz over the entire NRD operatingband.
Table 6.5: Downlink to NRD coupling requirements verification matrix
RequirementNumber
Requirement Compliance VerificationStatus
NS3-SYS-R012 The spacecraft platform shall limit plat-form generated noise at the input to theNRD payload to -175 dBm/Hz over theentire NRD operating band.
Compliant Verifiedthroughdesign
frequency within the frequency range of 2200-2290 MHz. The downlink system will provide a
maximum of 29.9 dB at the output of the downlink antenna (from Table 4.5), and the linearly
polarized NRD antenna elements will only be capable of accepting half of this power (26.9 dB)
according to Table 2.1. The feed loss between the NRD elements and NRD payload will be
1 dB; this means that a maximum of 25.9 dB will reach the NRD payload receiver, assuming
that there is no isolation between the downlink and NRD antennas. As the NRD payload
is designed to accept this level of emissions from the downlink system, there is no need for
additional filtering to be placed on the NRD system in the spacecraft bus over the downlink
frequency range.
6.3 Downlink and Automatic Identification System Receiver
Coupling
Similar to the NRD payload, the AIS payload on NorSat-3 is a sensitive receiver which imposes
restrictions on the noise generated by the spacecraft over the AIS frequency range, however the
AIS receiver also has requirements on the incident output power of the spacecraft bus. These
requirements are stated in Table 6.6, and the allowable incident power over the various AIS
channels is described in Table 6.7.
The output power of the S-band transmitter over the AIS frequency range (156.025 MHz
to 162.025 MHz) was measured at various data rates and modulation formats, with the results
in Figure 6.5. Note that case ‘TX OFF’ is a baseline result to identify the noise floor of the
receiver. All of the results discussed have been corrected for feed loss from the test set-up. The
three data rates examined are the lowest data rate of the transmitter, the lowest expected data
rate which NorSat-3 will be operating at, and the highest data rate NorSat-3 will be operating
at, which are 32 kbps, 128 kbps, and 2048 kbps respectively.

Chapter 6. Payload Antenna Considerations 65
Table 6.6: Downlink to AIS receiver coupling requirements
RequirementNumber
Requirement
NS3-SYS-R013 The spacecraft platform shall limit platform generated noise at the inputto the AIS payload to -170 dBm/Hz over the entire maritime VHF bandfrom 156.025 MHz to 162.025 MHz.
NS3-SYS-R014 The spacecraft platform shall limit platform generated noise at the inputto the AIS payload to specific power levels as measured across particularmaritime VHF channels as specified in Table 6.7.
Table 6.7: AIS receiver electromagnetic compatibility specifications
Channel Centre Frequency[MHz]
Bandwidth[kHz]
Maximum AllowableIncident Power [dBm]
VHF 75 156.775 6.25 -132
VHF 76 156.825 6.25 -132
VHF 87B 161.975 6.25 -132
VHF 88B 162.025 6.25 -132
-140
-130
-120
-110
-100
156.025 157.025 158.025 159.025 160.025 161.025 162.025
Rec
eive
d P
ow
er (
dB
m)
Frequency (MHz)
TX OFF 1 TX OFF 232 kbps BPSK 32 kbps QPSK128 kbps BPSK 128 kbps QPSK2048 kbps BPSK 2048 kbps QPSKMaximum Allowable Incident Power
Figure 6.5: S-band transmitter output over the AIS frequency range

Chapter 6. Payload Antenna Considerations 66
-60
-50
-40
-30
-20
-10
0
156.025 157.025 158.025 159.025 160.025 161.025 162.025
Iso
lati
on
(d
B)
Frequency (MHz)
Downlink to AIS +Z Isolation Downlink to AIS -Y Antenna Isolation
Required Isolation
Figure 6.6: Simulated isolation between the AIS antennas and the S-band downlink antennasover the AIS frequency range
6.3.1 Generated Noise
The highest power flux density measured over the AIS frequency range was -150.0 dBm/Hz,
for a data rate of 2048 kbps and Quadrature Phase Shift Keying (QPSK) modulation. This is
the direct output from the transmitter, and must be corrected for isolation between the S-band
downlink antennas and AIS antennas, as it does not meet the -170 dBm/Hz requirement.
Figure 6.6 shows the simulated isolation between the various AIS antennas and the S-band
downlink antennas over the entire AIS frequency band. The worst case isolation value between
any two antennas in this frequency range is -48.7 dB. The power spectral density of the signal
from the S-band transmitter becomes -198.7 dBm/Hz after subtracting the worst case simulated
antenna isolation from the received power, which meets the spectral density requirement with a
28.7 dB margin. This corrected value is the highest spectral density from the S-band transmitter
which will be seen at the AIS receiver input. Therefore, a filter over the AIS frequency range
is not needed on the S-band transmitter to meet Requirement NS3-SYS-R013.
6.3.2 Incident Power
System level requirements for spacecraft bus electromagnetic compatibility are described in
Table 6.7. The measurements shown in Figure 6.5 were completed at 25 ◦C, however the trans-
mitter has a wide operational temperature range over which the peaks of the signals are subject
to shifting. As such it is prudent to examine the highest incident power over the entire fre-
quency range, not just the desired channels measured. The highest incident power measured
from the S-band transmitter over the entire AIS frequency range was -99.8 dBm, for a data rate

Chapter 6. Payload Antenna Considerations 67
-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
2.188 2.198 2.208 2.218 2.228 2.238
Iso
lati
on
(d
B)
Frequency (MHz)
Downlink to AIS +Z Isolation Downlink to AIS -Y Isolation
Required Isolation
Figure 6.7: Simulated isolation between the AIS antennas and the S-band downlink antennasover the downlink frequency range
of 2048 kbps and with QPSK modulation. The worst case simulated antenna isolation of -48.7
dB is included to find the highest incident power at the input of the AIS receiver, -148.5 dBm.
This meets the incident power requirement with over 16 dB of margin in all cases. Therefore, a
filter over the AIS frequency range is not needed on the S-band transmitter to meet the system
level incident power requirement.
6.3.3 Blocking Levels
At the downlink frequency, the transmitter has an output power of 27.7 dBm and the AIS
receiver has a blocking level of 30 dBm. The minimum simulated antenna isolation between
the downlink antenna array and AIS antennas over the downlink frequency range is -32 dB
from Figure 6.7. When including this isolation, the the power reaching the AIS receiver at the
downlink frequency range becomes -4.3 dBm, which is much less than the allowable 30 dB, and
as such is sufficiently low that the downlink signal will not damage the AIS receiver. Therefore a
filter on the AIS system is not required over the downlink frequency range. Note that this does
not come from system requirements, but instead comes from the AIS receiver specifications.
6.4 Filter Selection
The analysis completed in this chapter indicates that there is no filtering required on the AIS
and NRD payloads for the downlink frequency range, as these receivers are designed to reject
high power emissions from outside of their operating frequency ranges. Testing and analysis has

Chapter 6. Payload Antenna Considerations 68
Table 6.8: Downlink to AIS receiver coupling requirements verification matrix
RequirementNumber
Requirement Compliance VerificationStatus
NS3-SYS-R013 The spacecraft platform shall limit plat-form generated noise at the input to theAIS payload to -170 dBm/Hz over theentire maritime VHF band from 156.025MHz to 162.025 MHz.
Compliant Verifiedthroughanalysis
NS3-SYS-R014 The spacecraft platform shall limit plat-form generated noise at the input tothe AIS payload to specific power levelsas measured across particular maritimeVHF channels as specified in CS-49.
Compliant Verifiedthroughanalysis
revealed that no filtering is required on the S-band transmitter for the AIS frequency ranges,
as the power levels which reach the receiver are sufficiently low to avoid damaging the receiver,
degrading performance, or overpowering payload data. Analysis and testing completed for the
NRD payload was not able to return conclusive results on the emissions of the transmitter
over the NRD frequency range, which necessitates the inclusion of a filter to guarantee that the
downlink system is compliant with payload requirements. As such, at least 45 dB of attenuation
is required on the S-band transmitter for a stop band which encapsulates the NRD frequency
range. The selected filter has a passband of 0 - 6 GHz, over which it has an insertion loss of
0.5 dB in the pass band, accounted for in the downlink budget. The stop band ranges from 6 -
18 GHz and has a rejection of 60 dB over the NRD frequency range, adding sufficient margin
to the design. Mechanically, the filter has a low mass and a low profile, and has been placed in
the spacecraft without issue.

Chapter 7
Antenna Testing
The simulated antenna performance discussed in previous sections must be verified through
testing to ensure the compliance of the communications subsystem design to requirements.
Values requiring verification are: the Right Hand Circular Polarization (RHCP) gain coverage
of the uplink and downlink antenna arrays; the half-power beamwidth of the high speed uplink
antenna; isolation between the various bus antennas, and; the isolation between the downlink
antenna array and the payload antennas. These performance metrics can each be measured
with one of two tests, an antenna pattern test or an isolation test.
7.1 Antenna Pattern Test
7.1.1 Test Overview
A satellite will tumble unpredictably for a period of time upon release from a launch vehicle,
and as such it must be able to establish a communication link with a ground station in an
arbitrary attitude with respect to the ground station. The portion of spacecraft attitudes with
adequate communication link performance can be described through the antenna coverage, and
can be determined with the antenna pattern and the minimum required antenna gain.
The mounting structure and any nearby objects will affect the performance of an antenna
due to interactions between the electromagnetic waves and the surrounding components, there-
fore the surroundings of an antenna must be taken into account to accurately characterize the
gain pattern. For an object with no moving external parts, the gain pattern of any antenna
mounted on it will always remain the same (provided no damage occurs to the antenna), and
as such an antenna pattern test for a spacecraft antenna must be completed with the antenna
mounted on the spacecraft structure. An anechoic chamber is used to minimize electromag-
netic waves from other references or reflected off of other objects. This test must be completed
separately for each antenna or antenna array.
An antenna pattern test requires a reference antenna to transmit a signal over the desired
frequency range while pointing the antenna boresight directly at the antenna under test. Due to
69

Chapter 7. Antenna Testing 70
X
Z
Y
θ
φr
AntennaBoresight,θ = 0, φ = 0
AzimuthRotation
ElevationRotation
Figure 7.1: Spherical coordinates used for the antenna under test
the nature of the test, the spherical coordinates described in Figure 7.1 are used to determine the
required orientations. The antenna under test must be oriented such that the antenna boresight
is in the same azimuth plane as the reference antenna; the satellite is then rotated completely
in this azimuth plane. The antenna under test is measured with vertical polarization and with
horizontal polarization to verify the polarization of the antenna. After this initial plane, the
satellite is rotated by an elevation angle about the antenna boresight, and a second complete
rotation occurs about the new azimuth plane. This entire process is repeated until the satellite
is rotated 180◦ about the antenna boresight: no new data is gathered by rotating the satellite
more than 180◦ about the antenna boresight, as this data is measured by previous rotations.
The magnitude and phase information from each of these segments is then interpolated over a
4π steradian view of the satellite, with the resolution determined by the number of rotations
about boresight and the measurement step in the azimuth plane.
Figure 7.2 displays the method of performing the antenna pattern test for a passive antenna
and an active antenna. In this test set-up an antenna measurement workstation is used to
control equipment and compile the measured data; during a test, the work station issues com-
mands to the Vector Network Analyser (VNA), signal generator, and rotation table. The Radio
Frequency (RF) signal created by the signal generator passes through a coupler, which sends a
small amount of power to Port 1 of the network analyser to act as a reference, while the rest of
the power is sent to the reference antenna in the anechoic chamber. The precise percentage split
of the power is determined by the coupler itself. Opposite the reference antenna is an antenna

Chapter 7. Antenna Testing 71
Rotating
Test
Stand
(Azimuth
Rotation)
Network Analyser
Port 1
Reference
Signal Generator Coupler
Antenna
Measurement
Work Station
System
Cable
System Cable
Port 2
Antenna Under
Test on Satellite
Source
Antenna
Satellite Orientations for Antenna
Under Test (Elevation Rotation,
About Antenna Boresight)
Satellite
Position
Controller
Short Test
CableBias-TAdapter
Power
Supply
3V
Required if the antenna
under test is an active
antenna
Figure 7.2: Finding the antenna pattern of an antenna
positioner, which is a stand that rotates in the azimuth direction. The rotation of the antenna
positioner is regulated by a position controller, which receives commands on angular position
and rate from the work station. On the antenna positioner lies the antenna under test, which
is connected to the network analyser. The network analyser compares the signals from Port 1
and Port 2, and provides this information to the work station. This set-up allows antenna gain
and phase to be measured in a complete rotation about an axis, providing a full planar cut of
the antenna performance. The test set-up requires the addition of a power supply, bias-T, and
adapters as needed between the output port of the receive antenna and Port 2 of the VNA if
the device under test is for an active antenna.
7.1.2 Reference Antenna Correction Factors
The effects of the system set-up and environment must be isolated and compensated for to
accurately measure the antenna pattern. These effects are primarily from the system cable
loss and the reference antenna performance. These are quantified with a system cable loss
measurement and a reference antenna measurement at each frequency of interest, which are
then used to calculate the correction factors of the reference antenna. Figure 7.3 shows the
method of finding the system cable loss of the test set-up for the antenna pattern test. This
set-up includes the addition of an attenuator and cable with known forward transmission losses
(S21 parameters), which are subtracted from the measured values to receive the loss of the
system attributed to the cables and set-up used.
The gain of the reference antenna used to find the gain pattern of the antenna under test
is quantified with the reference antenna measurement; the antennas are not rotated in relation

Chapter 7. Antenna Testing 72
Rotating
Test
Stand
(Azimuth
Rotation)
Network Analyser
Port 1
Reference
Signal Generator Coupler
Antenna
Measurement
Work Station
System
Cable
System Cable
Port 2
Test Cable (with
known losses)
Position
Controller
Attenuator
Short Test
Cable DC
BlockAdapter
Power
Supply
3V
Bias-T
Required if the antenna
under test is an active
antenna
Figure 7.3: Measuring the system cable loss of the test set-up
to each other, but must remain fixed and properly aligned. In this measurement set-up, two
identical reference antennas are placed in the same set-up used to find the system cable loss,
replacing the attenuator and cable combination. In this way, the only new information is the
free space loss of the transmitted signal, and the gain of the reference antenna. However, as
there are two antennas used, the gain of a single antenna is simply half the total antenna gain
measured. Figure 7.4 shows the set-up for finding the two identical antenna gain for. The true
path loss LP , at the receive antenna in decibels is calculated with (7.1).
LP (dB) = PT (dB) + LACA(dB)− LACM (dB) (7.1)
In (7.1), PT is the measured signal strength from the two identical antenna measurement,
LAC,A is the actual loss of the attenuators and cables used in the test as measured with a
VNA, and LAC,M is the measured loss of the attenuators and cables used in the test set-up as
measured in the system cable loss test. This true path loss is necessary to determine the actual
gain of the reference antennas. The correction factor for the reference antenna, CR, can then
be calculated from (7.2). LF , the free space loss, is calculated with (2.3).
CR(dB) =LP (dB)− LF (dB)
2(7.2)
The correction factor associated with the entire system set-up to be applied to the antenna
pattern test results can be found by subtracting feed losses used on the antenna under test and

Chapter 7. Antenna Testing 73
Rotating
Test
Stand
(Azimuth
Rotation)
Network Analyser
Port 1
Reference
Signal Generator Coupler
Antenna
Measurement
Work Station
System
Cable
System Cable
Port 2
Source Antenna
Source
Antenna
Position
Controller
Short Test
CableAdapter
DC
Block
Power
Supply
3V
Bias-T
Required if the antenna
under test is an active
antenna
Figure 7.4: Reference antenna gain for the antenna pattern test
reference antenna gains from the reference antenna correction factor with (7.3).
C(dB) = CR(dB)− LT (dB)− LC(dB) (7.3)
In (7.3), LC is the sum of the losses of any cables, splitters, or filters between the floating end
of the system cable and the antenna(s) under test, and LT is the measured gain value from the
two identical antenna measurement. After the two antenna measurement has been completed,
the antenna pattern test may proceed according to Figure 7.2.
7.1.3 Antenna Measurement Data Processing
The desired results from an antenna pattern test are the linear polarization gains, the circular
polarization gains, axial ratio, and pattern coverage. The test provides horizontal and vertical
signal amplitudes (AH , AV ) and horizontal and vertical phase (PH , PV ) at each point measured.
The horizontal and vertical gains (GH and GV respectively) are calculated using the reference
antenna’s correction factor as a baseline with (7.4) and (7.5).
GH(dB) = AH(dB) + C(dB) (7.4)
GV (dB) = AV (dB) + C(dB) (7.5)
The Left Hand Circular Polarization (LHCP) and RHCP gains can be calculated using (7.6)
and (7.7) to construct a RHCP and LHCP pattern cut for each orientation [27]. Note that GH

Chapter 7. Antenna Testing 74
and GV are expressed in linear terms, not decibels.
GLHCP (dB) = 10 log10 ([GH cos(PH) +GV sin(PV )]2 + [GH sin(PH)−GV cos(PV )]2)−3 (7.6)
GRHCP (dB) = 10 log10 ([GH cos(PH)−GV sin(PV )]2 + [GH sin(PH) +GV cos(PV )]2)−3 (7.7)
The axial ratio, A, can then be determined using (7.8) [27], in which GLHCP and GRHCP
are expressed in decibels. Axial ratio refers to the maximum ratio of polarization in orthogonal
directions of the antenna, and is very useful for determining antenna performance.
A(dB) = 20 log10
(10
GRHCP (dB)
20 + 10GLHCP (dB)
20
10GRHCP (dB)
20 − 10GLHCP (dB)
20
)(7.8)
An important parameter for spacecraft antennas is spherical coverage, the portion of a
sphere for which the antenna performs at or above a certain threshold for a given parameter.
This can be used as a metric for horizontal gain, vertical gain, RHCP gain, LHCP gain, or axial
ratio, and the process remains the same for each. The area contributed by each measurement
point is found with (7.9).
aθ,φ =
0 xθ,φ < X
sin |φ|φsθs xθ,φ ≥ X(7.9)
Where aθ,φ is the area contributed by the measurement at point (θ, φ), φ is the azimuth
angle in radians, θ is the elevation angle in radians, φs is the azimuth angle step in radians, θs
is the elevation angle step in radians, xθ,φ is the performance measured at point (θ, φ), and X
is the threshold value which performance is being compared to. The total spherical coverage
can then be found with (7.10).
aθ,φ =
∑θnθi=1
∑φnφi=1
aθi,φi
4π(7.10)
7.1.4 NorSat-3
The requirements for the NorSat-3 uplink and downlink antennas are in Table 7.1. As the
uplink, downlink, and high speed uplink antennas have been designed to operate at 2032.965,
2032, and 2213 MHz respectively, the antennas are compliant to NS3-COM-R001 by design. The
75% spherical coverage of the antennas described in NS3-COM-R003 ensures a high probability
of communication in poor conditions, while the minimum 6 dB link margins encapsulate the
antenna gain values which achieve the 75% coverage. This requirement allows the selection of an
antenna gain value that meets both the 6 dB link margin and the 75% coverage. The high speed

Chapter 7. Antenna Testing 75
Table 7.1: Antenna pattern requirements
RequirementNumber
Requirement
NS3-COM-R001 RF communications for command, telemetry, and downlink of payloaddata between the ground station and satellite shall utilize the S-band.
NS3-COM-R003 Command and telemetry link margins (uplink and downlink) shall be noless than 6 dB with a minimum coverage of 75% about the spacecraft, ata minimum elevation angle of 5 degrees.
uplink system is not a critical link, and therefore is not subject to the 75% coverage requirement;
the antenna pattern test is completed to verify the performance of the patch antenna on the
spacecraft bus. The Global Positioning System (GPS) antenna is a commercially purchased
active antenna that is tested to find the effect of the spacecraft bus on the antenna pattern.
The antenna pattern tests have not yet been completed due to scheduling constraints, how-
ever the process described in this section has been applied to other Space Flight Laboratory
(SFL) satellites, which can be used to examine the accuracy of the simulated antenna results.
A separate SFL mission consists of a constellation of satellites which will characterize RF sig-
nals over a wide frequency range using multiple antennas. The bus antennas on these satellites
were simulated and tested using the same methods as NorSat-3. Confidence in the accuracy
of the simulations created for NorSat-3 can be established prior to completing the antenna
pattern tests by comparing the simulated and measured results from the SFL antenna pattern
tests completed for this other SFL satellite. Note that this comparison is not meant to be a
replacement for testing; this is simply performed as a method of determining the accuracy of
the simulations until antenna pattern testing can be completed. The simulated RHCP antenna
pattern for the previous mission’s S-band intersatellite link, consisting of one S-band patch
antenna operating at 2410 MHz, is shown in Figure 7.5, while the measured results are dis-
played in Figure 7.6. The simulated RHCP results for the previous mission’s S-band downlink
array are found in Figure 7.7, and the measured results are shown in Figure 7.8. The previous
mission’s S-band downlink system contains two S-band patch antennas operating at 2250 MHz
mounted on opposite sides of the spacecraft in the same manner as NorSat-3.
The intersatellite link antenna is similar to the antenna used for the high speed uplink
system, in that there is a single S-band patch antenna with no explicit coverage requirement.
Rather, it is more meaningful to look at the half-power beamwidth of the antenna. The sim-
ulation for the intersatellite link antenna provides a worst-case half-power beamwidth of 85◦,
while measured results provide a worst-case half-power beamwidth of 88◦. The downlink an-
tenna array has explicit antenna pattern coverage requirements, which can be used to compare
the simulated and measured results. The antenna array has a simulated coverage of 86.9%, and
a measured gain coverage of 87.3%. This proves that the simulation methods used on NorSat-3
and the previous mission are representative of the actual antenna performance, thus there is
a high degree of confidence in the accuracy of the simulated results for NorSat-3. Therefore,

Chapter 7. Antenna Testing 76
-50
-40
-30
-20
-10
0
10
0o Elevation Plane45o Elevation Plane90o Elevation Plane
135o Elevation Plane
-180o
-120o
-60o
0o
60o
120o
RHC
P G
ain
(dBi
)
Azimuth Angle
Figure 7.5: Simulated RHCP antenna pattern of the previous mission’s intersatellite link an-tenna
-50-40-30-20-10
010
-180o
-120o
-60o
0o
60o
120o
0o Elevation Plane45o Elevation Plane90o Elevation Plane
135o Elevation Plane
RHC
P G
ain
(dBi
)
Azimuth Angle
Figure 7.6: Measured RHCP antenna pattern of the previous mission’s intersatellite link an-tenna

Chapter 7. Antenna Testing 77
-35-30-25-20-15-10-505
0o Elevation Plane45o Elevation Plane90o Elevation Plane
135o Elevation Plane
-180o
-120o
-60o
0o
60o
120o
RHC
P G
ain
(dBi
)
Azimuth Angle
Figure 7.7: Simulated RHCP antenna pattern of the previous mission’s S-band downlink an-tenna array
-35-30-25-20-15-10-505
0o Elevation Plane45o Elevation Plane90o Elevation Plane
135o Elevation Plane
-180o
-120o
-60o
0o
60o
120o
RHC
P G
ain
(dBi
)
Azimuth Angle
Figure 7.8: Measured RHCP antenna pattern of the previous mission’s S-band downlink antennaarray

Chapter 7. Antenna Testing 78
Table 7.2: Antenna pattern requirements verification matrix
RequirementNumber
Requirement Compliance VerificationStatus
NS3-COM-R001 RF communications for command,telemetry, and downlink of payload databetween the ground station and satelliteshall utilize the S-band.
Compliant Verifiedthroughdesign
NS3-COM-R003 Command and telemetry link margins(uplink and downlink) shall be no lessthan 6 dB with a minimum coverage of75% about the spacecraft, at a minimumelevation angle of 5 degrees.
Compliant Verifiedthroughanalysis
antenna patterns for the bus antennas are expected to match the simulated results, and the
design will proceed under this assumption until the tests are completed.
7.2 Isolation Test
7.2.1 Test Overview
An isolation test is completed to verify that the receivers and transmitters in the system have
sufficient attenuation between one another such that a signal from a transmitter is at a safe
power level at the input of the receiver. The isolation test is performed by feeding a transmitting
antenna across the transmitter and receiver frequency bands while measuring the signal at the
output of the receive antenna; isolation is simply the forward transmission coefficient (S21
parameter) between the antennas. As with an antenna pattern test, an anechoic chamber is
used to minimize electromagnetic waves from other sources or reflected off of other object, and
a representative structure is needed to capture interactions between antennas on the spacecraft.
Figure 7.9 is the block diagram for the set-up required to complete isolation measurements
between a transmit antenna and a passive receive antenna or an active receive antenna. As
with the antenna pattern test, an antenna measurement workstation is used to control the
VNA and signal generator, and compile the measured data. The RF signal created by the
signal generator passes through a coupler, which sends a small amount of power to Port 1 of
the network analyser to act as a reference, while the rest of the power is sent to the transmitting
antenna on the spacecraft. The receiving antenna on the spacecraft is connected to the network
analyser. The network analyser compares the signals from Port 1 and Port 2, and provides this
information to the work station in the form of power gain magnitude. The test set-up requires
the addition of a power supply, bias-T, and adapters as needed between the output port of the
receive antenna and Port 2 of the VNA if the device under test is for an active antenna.
Isolation tests require corrections for the loss of the cables used in the test set-up, taken
with a system cable loss test. The system cable loss test is completed in a matter identical to

Chapter 7. Antenna Testing 79
Network Analyser
Port 1
Reference
Signal Generator Coupler
Antenna
Measurement
Work Station
System
Cable
System Cable
Port 2
Short Test
CableBias-TAdapter
Power
Supply
3V
Test
Stand Receive Antenna
on Satellite
Satellite
Transmit
Antenna on
SatelliteTest Cable (with
known losses)
Attenuator
Required if the antenna
under test is an active
antenna
Figure 7.9: Isolation test set-up
antenna pattern testing, displayed in Figure 7.3. The results from this measurement are used
to correct the isolation measurements to provide the actual antenna isolation.
7.2.2 Isolation Measurement Data Processing
The two outputs of the calibration and the isolation measurements are the magnitude of the
system cable loss and the magnitude of the uncorrected isolation between the antennas. These
must be used to find the actual isolation with (7.11), which is corrected for the test set-up.
I = SM − LS − LF (7.11)
In (7.11), LS is the system cable loss measured, LF is the feed loss between the system cable
and the antennas, SM is the measured forward transmission coefficient (S21 parameter) between
the antennas, and I is the true antenna isolation. Note that the loss values and the measured
forward transmission coefficient are negative, resulting in a negative corrected isolation value.
7.2.3 NorSat-3
NorSat-3 contains antennas for different links in close proximity to each other out of necessity.
Simulations completed with the High Frequency Structure Simulator (HFSS) show adequate
isolation between these systems, however these results require verification through the isolation
test. Isolation tests will be completed between the S-band downlink array (the only transmitting
system) and every receive antenna on the spacecraft, although isolation testing has not yet been
completed for NorSat-3 due to scheduling constraints.
The requirements for the isolation between the various transmit and receive antennas on
NorSat-3 are listed in Table 7.3. The values for the isolation between the downlink antennas and

Chapter 7. Antenna Testing 80
Transmitting Receiving Frequency Range Required Isolation
Downlink GPS GPS ≤ −20 dB
Downlink GPS Downlink ≤ −65.7 dB
Downlink Uplink Uplink ≤ −23.3 dB
Downlink Uplink Downlink ≤ −30 dB
Downlink High speed uplink High speed uplink ≤ −23.9 dB
Downlink High speed uplink Downlink ≤ −27.7 dB
Downlink AIS antenna 1 AIS ≤ −35.2 dB
Downlink AIS antenna 1 Downlink ≤ −27.7 dB
Downlink AIS antenna 2 AIS ≤ −35.2 dB
Downlink AIS antenna 2 Downlink ≤ −27.7 dB
Downlink NRD element 1 Downlink N/A
Downlink NRD element 1 NRD N/A
Downlink NRD element 2 Downlink N/A
Downlink NRD element 2 NRD N/A
Downlink NRD element 3 Downlink N/A
Downlink NRD element 3 NRD N/A
Downlink NRD element 4 Downlink N/A
Downlink NRD element 4 NRD N/A
Table 7.3: Isolation test requirements
Automatic Identification System (AIS) antennas over the AIS frequency range are the lowest
required isolation values to reduce the output from the S-band transmitter to acceptable levels.
There is no isolation requirement between the Navigation Radar Detector (NRD) array elements
and the downlink antennas because the low pass filter added to the downlink chain was selected
under the assumption that there is no isolation between the antennas over the NRD frequency
range, and the power rejection level of the NRD payload over the downlink frequency range is
sufficient to safely accept the downlink signals. The -27.7 dB isolation required between the
downlink system and most receiving systems at the downlink frequency is simply the output
power of the transmitter, thus guaranteeing that the receivers will not be damaged by the
high output power. As described in Section 5.2, the required isolation between the uplink and
downlink antenna arrays over the uplink frequency is -23.3 dB to prevent the downlink signal
from overpowering the uplink signal. Similarly, the required isolation between the downlink
antenna array and high speed uplink antenna is -23.9 dB.
The simulated isolation results are summarized in Table 7.4, where all simulated values meet
isolation requirements with significant margin. The GPS antenna performance is not simulated
as it’s performance is well established, and it is not a component designed by SFL. The isolation
between the GPS antenna and downlink antenna array is expected to meet requirements due
to the geometry of the GPS antenna on NorSat-3, which will provide higher isolation than the
implementation of the same GPS antenna on other spacecraft.
The process completed to test antenna isolation has been applied to other SFL satellites,

Chapter 7. Antenna Testing 81
Transmitting Receiving Frequency Range Worst Case SimulatedIsolation
Downlink Uplink Uplink -27.7 dB
Downlink Uplink Downlink -34.8 dB
Downlink High speed uplink High speed uplink -43.4 dB
Downlink High speed uplink Downlink -44.5 dB
Downlink AIS antenna 1 AIS -48.7 dB
Downlink AIS antenna 1 Downlink -32.0 dB
Downlink AIS antenna 2 AIS -58.0 dB
Downlink AIS antenna 2 Downlink -46.2 dB
Table 7.4: Simulated isolation
which can be used to examine the accuracy of the simulated isolation results. The SFL mission
discussed in Section 7.1.4 contains a variety of antennas, some of which operate over similar
frequency ranges and have similar geometries with respect to other antennas as NorSat-3.
Results of the simulated and measured antenna isolation for the antennas on the other mission
can be compared to examine the accuracy of the simulation methods used. Figure 7.10 displays
the comparison of simulated and measured values between the S-band downlink antennas and
the intersatellite link antennas, as well as the isolation between the S-band downlink antennas
and the S-band uplink antenna over the S-band downlink frequency range. The simulated results
match the measured results extremely well, and the minimum simulated isolation is lower than
the minimum measured isolation over the entire frequency range for both cases examined. The
differences between the measured and simulated results are due to measurement error, and are
smaller than they appear as these values are in decibels. The difference between -50 dB and
-60 dB is 0.0009%, which is negligible; the measured and simulated results do not have this
extreme a difference, and are therefore well matched. The simulated and measured isolation
between the S-band downlink and AIS antennas on the previous mission over the AIS frequency
range agree very well, with the minimum simulated and measured isolation matching almost
perfectly in Figure 7.11.
This comparison shows that in general the simulated isolation results match well with the
measured results, but are conservative, and therefore safe to use for making design decisions
until the isolation tests can be completed on NorSat-3. As the simulated isolation values are
far greater than the required isolation values for each frequency range, there is high confidence
that the measured isolation values will meet requirements.

Chapter 7. Antenna Testing 82
-70
-60
-50
-40
-30
-20
-10
0
2225 2235 2245 2255 2265 2275
Magnitude (dB)
Frequency (MHz)
Intersatellite - Downlink Simulated Intersatellite - Downlink Measured
Uplink - Downlink Simulated Uplink - Downlink Measured
Figure 7.10: Previous mission’s S-band downlink to intersatellite link isolation, and S-banddownlink to S-band uplink isolation over the S-band downlink frequency range
-60
-50
-40
-30
-20
-10
0
156.025 157.025 158.025 159.025 160.025 161.025 162.025
Isolation (dB)
Frequency (MHz)
AIS - Downlink Measured AIS - Downlink Simulated
Figure 7.11: Previous mission’s S-band downlink to AIS antenna isolation over the AIS fre-quency range

Chapter 8
Requirement Compliance Table
The primary command receiver on NorSat-3 is the Ultra High Frequency (UHF) receiver which
has significant flight heritage from previous Space Flight Laboratory (SFL) missions. The
uplink system operates in the S-band frequency range but uses a down converter to enable
the use of the UHF receiver. Two S-band patch antennas provide omni-directional coverage of
Right Hand Circular Polarization (RHCP) gain; the outputs of these antennas are combined
and fed through a filter before being input to the down converter, after which the UHF receiver
converts the Radio Frequency (RF) signal into a digital signal. The uplink budget achieves a
link margin of 13.15 dB, satisfying the required 6 dB margin with a worst case antenna gain of
-7 dBi, which provides a simulated 85.9% coverage about the spacecraft and therefore satisfies
the 75% coverage requirement. There is high confidence that the simulation will match the
actual coverage values due to a comparison made between simulation and measured results
for an SFL mission with similar bus antennas. High simulated isolation between the uplink
antenna array and the downlink antenna array over both the downlink and uplink frequency
ranges establishes assurance that there will be no damage to the sensitive components in the
uplink chain from the high-powered downlink signal.
Initial high level analyses proved that a high speed uplink system is needed to meet the
various uplink requirements. The high speed uplink system uses a new S-band receiver designed
by SFL, and serves as a means of allowing payload software updates. While the UHF receiver
operates at a data rate of 4 kbps, the S-band receiver offers data rates up to 32 kbps. The high
speed uplink system consists solely of an antenna, transmission line, and receiver, achieving
a high speed uplink margin of 12.94 dB. Receivers which have not been tested on-orbit are
recommended to have link margins of at least 12 dB, and the new S-band receiver meets this
desired link margin. A realistic operational attitude simulation was used to implement the
communication link described in the link budget and perform a data throughput analysis.
After accounting for dropped packets, packet overhead, and the time spent establishing a link,
the high speed uplink is capable of supporting a data rate of 20 MB over 24 hours. The S-band
patch antenna used on the high speed uplink system offers a worst-case half-power beamwidth
of 89◦, thus allowing high gain operation of the high speed uplink system while the spacecraft
83

Chapter 8. Requirement Compliance Table 84
performs attitude slews during payload operations.
The downlink system uses the same transmitter as NorSat-1 and NorSat-2, however the
addition of a filter to suppress noise output at the Navigation Radar Detector (NRD) operating
frequency range makes the downlink system unique. This filter is sized based on a test of the
output power of the transmitter over the NRD frequency range, under the worst-case assumption
that there is no isolation between the downlink antennas and NRD antenna array. A similar
analysis performed for the Automatic Identification System (AIS) receiver payload revealed
that filtering is not necessary over the AIS frequency range. The downlink budget achieves a
link margin of 6.51 dB, satisfying the required 6 dB margin at a worst case antenna gain of -7
dBi, which provides a simulated 80.7% coverage about the spacecraft and therefore satisfies the
75% coverage requirement. As with the uplink system, there is confidence in this simulation
due to results from the previous SFL mission’s antenna pattern tests. The downlink antenna
array has sufficient isolation between the uplink antenna array, the high speed uplink antenna,
and the payload AIS antennas over the downlink frequency range, ensuring that the high-
power downlink signal will not damage the sensitive receivers. A Power Flux Density (PFD)
analysis established the lower limits of the downlink data rate to be 128 kbps with Binary
Phase Shift Keying (BPSK) modulation, and 256 kbps with Quadrature Phase Shift Keying
(QPSK) modulation. This lower level on the downlink data rate prevents the spacecraft from
violating guidelines from the International Telecommunications Union (ITU) and saturating
the frequencies adjacent to the downlink frequency, which could prevent other spacecraft from
communicating with a ground station. The same data throughput analysis completed on the
high speed uplink system has revealed that the downlink system is capable of supporting a data
rate of 500 MB over 24 hours.
The principal requirement for the design and positioning of the payload AIS antennas on
NorSat-3 are their combined total coverage and performance over the NRD field of view. Three
antenna configurations were examined, each consisting of two λ/4 Very High Frequency (VHF)
monopole antennas. The designs were evaluated based on performance, coverage, ease of de-
ployment, and positioning constraints to select the optimal antenna configuration. Analyses
were performed to ensure that there is no risk of damage or reduced performance to the AIS re-
ceiver from the downlink signal over the downlink and AIS frequency ranges. Similarly, analyses
concluded that there is no risk of damage or reduced performance to the NRD payload at the
downlink frequency, but a filter is required on the downlink chain to suppress the transmitted
signal over the NRD frequency range. This filter will not be necessary if the downlink to NRD
antenna array isolation is measured to be at least 45 dB over the NRD frequency range.
Table 8.1 summarizes the status of all requirements directly relevant to the communications
subsystem. Note that requirements designated at the system level or for other subsystems are
only examined with regards to their interaction or relevance to the communications subsystem
in the scope of this thesis. These requirements are subject to further analysis and testing from
other subsystems which occur separately from the analysis and testing completed in this thesis.

Chapter 8. Requirement Compliance Table 85
Requirements on the NorSat-3 communications subsystem have been verified through design,
analysis, or testing; the only remaining step to be taken for the completion of the design is
the verification or updating of values in the link budget and various analyses with results from
the antenna pattern tests and isolation tests. As these values have been based on results from
previous hardware tests or representative simulations, the completion of these tests will allow
a more accurate solution, but will not affect the design of the communications subsystem.
Table 8.1: Communications subsystem requirements verification matrix
Requirement
Number
Requirement Compliance Verification
Status
NS3-COM-R001 RF communications for command,
telemetry, and downlink of payload data
between the ground station and satellite
shall utilize the S-band.
Compliant Verified
through
design
NS3-COM-R002 Communication with the spacecraft shall
be full duplex.
Compliant Verified
through
design
NS3-COM-R003 Command and telemetry link margins
(uplink and downlink) shall be no less
than 6 dB with a minimum coverage of
75% about the spacecraft, at a minimum
elevation angle of 5 degrees.
Compliant Verified
through
analysis
NS3-COM-R004 All link analysis shall use the follow-
ing ground station parameters: Vardø
(Primary), EIRP = 82.38 dBm, G/T =
14.72 dB/K; Svalbard (Back-up), EIRP
= 79.37 dBm, G/T = 12.40 dB/K
Compliant Verified
through
design
NS3-COM-R005 The spacecraft shall include a command
receiver with flight heritage.
Compliant Verified
through
design
NS3-COM-R006 The uplink data rate shall support uplink
of 20 MB over 24h using Vardø ground
station, given nominal operating condi-
tions.
Compliant Verified
through
analysis
NS3-COM-R007 The downlink data rate shall support
downlink of 500 MB over 24h using Vardø
ground station, given nominal operating
conditions.
Compliant Verified
through
analysis
Continued on next page

Chapter 8. Requirement Compliance Table 86
Table 8.1 – Continued from previous page
Requirement
Number
Requirement Compliance Verification
Status
NS3-COM-R008 The spacecraft shall be able to communi-
cate with the ground station with a max-
imum rotation rate of 20◦/s about any
arbitrary axis.
Compliant Verified
through
design
NS3-COM-R009 When powered, it shall not be possible
for the system to hold its primary com-
mand receiver in an unpowered state for
greater than 5 seconds.
Compliant Verified
through
design
NS3-SYS-R001 The spacecraft shall be designed to oper-
ate in any high inclination orbit with an
altitude between 550 and 720 km.
Compliant Verified
through
analysis
NS3-SYS-R012 The spacecraft platform shall limit plat-
form generated noise at the input to the
NRD payload to -175 dBm/Hz over the
entire NRD operating band.
Compliant Verified
through
design
NS3-SYS-R013 The spacecraft platform shall limit plat-
form generated noise at the input to the
AIS payload to -170 dBm/Hz over the
entire maritime VHF band from 156.025
MHz to 162.025 MHz.
Compliant Verified
through
analysis
NS3-SYS-R014 The spacecraft platform shall limit plat-
form generated noise at the input to
the AIS payload to specific power levels
as measured across particular maritime
VHF channels as specified in CS-49.
Compliant Verified
through
analysis
NS3-SYS-R015 The spacecraft dimensions, including ap-
pendages, shall be compatible with a
qualified SFL satellite deployment sys-
tem (XPOD Duo).
Compliant Verified
through
design
NS3-SYS-R018 The spacecraft should not require any
major modifications to the selected
XPOD design.
Compliant Verified
through
design
NS3-SYS-R022 The spacecraft shall be designed to use
a single ground station located in Vardø,
Norway.
Compliant Verified
through
design
Continued on next page

Chapter 8. Requirement Compliance Table 87
Table 8.1 – Continued from previous page
Requirement
Number
Requirement Compliance Verification
Status
NS3-STR-R003 A minimum of two AIS antennas shall be
provided by SFL and mounted externally.
The antenna elements shall be mounted
orthogonally, and such that AIS recep-
tion is optimized during NRD payload
operations.
Compliant Verified
through
design
NS3-STR-R006 A Global Positioning System (GPS) an-
tenna shall be accommodated in a lo-
cation that minimizes obstructions and
maximizes performance during NRD
payload operations.
Compliant Verified
through
design
End of Table 8.1

Chapter 9
Conclusions
NorSat-3 is a satellite mission which will improve current maritime ship tracking capabilities by
augmenting Automatic Identification System (AIS) data with navigation radar data. This will
enable NorSat-3 to find ships which are broadcasting correct AIS information, incorrect AIS
information, or no AIS information at all, provided that the ships are using navigation radar.
A more complete picture of maritime traffic can be found by fusing data from an AIS receiver
and a Navigation Radar Detector (NRD), thus NorSat-3 will provide insight into illegal actions
in areas of interest. NorSat-3 builds on the successful on-orbit heritage of it’s predecessors,
NorSat-1 and NorSat-2, and leverages flight qualified components wherever possible to simplify
the design process and decrease risk involved in the design.
This thesis details the steps completed to design a communications system which meets all
relevant requirements for the NorSat-3 satellite mission. An initial high level design was estab-
lished from system level requirements, and the design was expanded upon with analyses in an
iterative approach to establish compliance to all requirements. Contributions were provided to
the layout of the payload antennas to optimize their performance and reduce effects from the
spacecraft bus antennas. The final design consists of an uplink system, a high speed uplink
system, and a downlink system to provide full duplex communication with a ground station.
The majority of the work completed in this thesis focuses on the link margins, data through-
put, antenna performance, and incident power. Further testing is required to validate the bus
antenna patterns, as well as the isolation for various bus and payload antennas, however there
is a high level of confidence in the simulated results. Therefore, the design of the communica-
tions subsystem on NorSat-3 is compliant with all relevant requirements and shall proceed to
hardware testing and spacecraft integration upon the completion of the design validation.
The communications subsystem detailed in this thesis will support NorSat-3 in completing
it’s mission objectives, and has been designed specifically to avoid causing interference or issues
with the payload instruments. The robust design, as well as the knowledge and analyses gained
from the completion of this thesis can be directly applied to future missions to extend the
capabilities of satellite missions and assist in the growth of the space industry and quality of
science produced by it.
88

References
[1] G. Bonin, “Microspace and Human Spaceflight,” The Space Review, 2009.
[2] International Convention for the Safety of Life at Sea (SOLAS V), “Safety of Navigation,
Chapter V, Regulation 19,” Merchant Shipping (Safety of Navigation) Regulations, 2002.
[3] T. Eriksen, G. Høye, B. Narheim, and B. J. Meland, “Maritime traffic monitoring using a
space-based AIS receiver,” Acta Astronautica, vol. 58, pp. 537–549, may 2006.
[4] R. E. Zee, “Nanosatellites: CANX-6 / NTS.” https://www.utias-sfl.net/?page_id=
205, Jan. 2014. Accessed August 4, 2018.
[5] T. Eriksen, A. N. Skauen, B. Narheim, O. Helleren, O. Olsen, and R. B. Olsen, “Tracking
ship traffic with space-based AIS: Experience gained in first months of operations,” in 2010
International WaterSide Security Conference, IEEE, nov 2010.
[6] Norwegian Defence Research Establishment, “NORAIS-2: Securing a better maritime
picture.” https://www.ffi.no/no/Forskningen/forsvarssystemer/Sider/NORAIS-2.
aspx. Accessed June 6, 2018.
[7] B. Ellingsen, “Norwegian AIS-satellites see far more ships.” https://www.romsenter.no/
eng/News/News/Norwegian-AIS-satellites-see-far-more-ships2. Acessed June 18,
2018.
[8] R. Gabler and W. Koch, “Detection and Tracking of Non-Cooperative Vessels,” in Port
and Regional Maritime Security, RTO-MP-SCI-247, NATO Unclassified, 2012.
[9] M. Jackson, “The geometry of bistatic radar systems,” IEE Proceedings F Communica-
tions, Radar and Signal Processing, vol. 133, no. 7, p. 604, 1986.
[10] R. E. Zee, “Products & Services: Satellite Platforms.” https://www.utias-sfl.net/
?page_id=89. Accessed June 16, 2018.
[11] B. Walter, P.-L. Levesque, G. Kopp, B. Andersen, I. Beck, W. Finsterle, M. Gyo, K. Heuer-
man, S. Koller, N. Mingard, A. R. Oliva, D. Pfiffner, R. Soder, M. Spescha, M. Suter, and
W. Schmutz, “The clara/norsat-1 solar absolute radiometer: instrument design, charac-
terization and calibration,” Metrologia, vol. 54, no. 5, p. 674, 2017.
89

References 90
[12] L. M. Bradbury, D. Diaconu, S. M. Laurin, C. Ma, A. M. Beattie, R. E. Zee, I. S. Spyde-
vold, H. C. Haugli, J. Harr, and F. Udnaes, “NORSAT-2: Enabling Advanced Maritime
Communication with VDES,” in 31st Annual AIAA/USU Conference on Small Satellites,
2017.
[13] J. Pelton, “The Start of Commercial Satellite Communications,” IEEE Communications
Magazine, vol. 48, pp. 24–31, mar 2010.
[14] H. Kaushal and G. Kaddoum, “Optical communication in space: Challenges and mitigation
techniques,” IEEE Communications Surveys & Tutorials, vol. 19, no. 1, pp. 57–96, 2017.
[15] W. L. Stutzman and G. A. Thiele, Antenna Theory and Design. John Wiley & Sons, 2013.
[16] I. Poole, Newnes Guide to Radio and Communications Technology. Newnes, 2003.
[17] Avionics Department, Electronic Warfare and Radar Systems Engineering Handbook.
Naval Air Warfare Center Weapons Division Technical Communication Office, 2013.
[18] D. Roddy, Satellite Communications, Fourth Edition. MCGRAW HILL BOOK CO, 2006.
[19] J. R. Wertz and W. J. Larson, Space Mission Analysis and Design - 3rd Edition. Micro-
cosm, 1999.
[20] D. M. Pozar, Microwave Engineering Second Edition. John Wiley & Sons, Inc, 1998.
[21] C. Ma, “NORSAT-1 Communication Subsystem Design Document,” tech. rep., Space
Flight Laboratory, 2014.
[22] C. Ma, “S-band Uplink Receiver Design Document,” tech. rep., Space Flight Laboratory,
2017.
[23] M. Arias and F. Aguado, “Small Satellite Link Budget Calculation.” Universidade de Vigo
and CINAE, 2016.
[24] N. Roth and I. Bennett, “GPS PPS Stability Test Results,” tech. rep., Space Flight Lab-
oratory, 2017.
[25] R. Magner, “NorSat-3 Star Tracker Placement,” tech. rep., Space Flight Laboratory, 2017.
[26] D. Kekez, “Nanosatellite Protocol (NSP) Versions 3 and 4,” tech. rep., Space Flight Lab-
oratory, 2013.
[27] B. Y. Toh, R. Cahill, and V. Fusco, “Understanding and measuring circular polarization,”
IEEE Transactions on Education, vol. 46, pp. 313–318, aug 2003.