Embed Size (px)
Citation preview

1
Department of Computer ENGINEERING - Networks
College of computer & information system
Jazan University, Jazan
KINGDOM OF SAUDI ARABIA
Class notes
Microprocessor & assembly language
(CNET 315)
COURSE COORDINATOR: NAASIR KAMAAL KHAN
REVISED: SEPTEMBER 2014

2
Chapter 1
Introduction to Microprocessors
Computer:
Computer is an electronic device for storing and processing data, typically in binary form,
according to instructions given to it in a variable program. Computer performs basically five
major computer operations or functions irrespective of their size and make. These are
1. It accepts data or instructions by way of input,
2. It stores data,
3. It can process data as required by the user,
4. It gives results in the form of output, and
5. It controls all operations inside a computer.
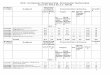
Block Diagram of Computer:

3
Components of Computer:
1. Central Processing Unit (CPU)
The task of performing operations like arithmetic and logical operations is called
processing. The Central Processing Unit (CPU) takes data and instructions from the
storage unit and makes all sorts of calculations based on the instructions given and the
type of data provided. It is then sent back to the storage unit. CPU includes Arithmetic
logic unit (ALU) and control unit (CU)
2. Primary Memory
Primary Memory can be further classified as RAM and ROM.
RAM or Random Access Memory is the unit in a computer system. It is the place in a
computer where the operating system, application programs and the data in current use
are kept temporarily so that they can be accessed by the computer’s processor. It is said
to be ‘volatile’ since its contents are accessible only as long as the computer is on. The
contents of RAM are no more available once the computer is turned off.
ROM or Read Only Memory is a special type of memory which can only be read and
contents of which are not lost even when the computer is switched off. It typically
contains manufacturer’s instructions. Among other things, ROM also stores an initial
program called the ‘bootstrap loader’ whose function is to start the operation of computer
system once the power is turned on.
3. Input / Output Devices
These devices are used to enter information and instructions into a computer for storage
or processing and to deliver the processed data to a user. Input/Output devices are
required for users to communicate with the computer. In simple terms, input devices
bring information IN to the computer and output devices bring information OUT of a
computer system. These input/output devices are also known as peripherals since they
surround the CPU and memory of a computer system.
System Bus:
System bus is a single computer bus that connects the major components of a computer system.
The technique was developed to reduce costs and improve modularity. It combines the functions

4
of a data bus to carry information, an address bus to determine where it should be sent, and
a control bus to determine its operation.
Types of Computer:
Computers can be generally classified by size and power as follows, though there is considerable
overlap:
Personal computer: A small, single-user computer based on a microprocessor.
Workstation: A powerful, single-user computer. A workstation is like a personal
computer, but it has a more powerful microprocessor and, in general, a higher-quality
monitor.
Minicomputer: A multi-user computer capable of supporting up to hundreds of users
simultaneously.
Mainframe: A powerful multi-user computer capable of supporting many hundreds or
thousands of users simultaneously.

5
Supercomputer: An extremely fast computer that can perform hundreds of millions of
instructions per second.
Supercomputer and Mainframe
Mainframe was a term originally referring to the cabinet containing the central processor unit or
"main frame" of a room-filling Stone Age batch machine. After the emergence of smaller
"minicomputer" designs in the early 1970s, the traditional big iron machines were described as
"mainframe computers" and eventually just as mainframes. Nowadays a Mainframe is a very
large and expensive computer capable of supporting hundreds, or even thousands, of users
simultaneously. The chief difference between a supercomputer and a mainframe is that a
supercomputer channels all its power into executing a few programs as fast as possible, whereas
a mainframe uses its power to execute many programs concurrently.
Minicomputer
It is a midsize computer. In the past decade, the distinction between large minicomputers and
small mainframes has blurred, however, as has the distinction between small minicomputers and
workstations. But in general, a minicomputer is a multiprocessing system capable of supporting
from up to 200 users simultaneously.
Workstation
It is a type of computer used for engineering applications (CAD/CAM), desktop publishing,
software development, and other types of applications that require a moderate amount of
computing power and relatively high quality graphics capabilities. Workstations generally come
with a large, high-resolution graphics screen, at large amount of RAM, built-in network support,
and a graphical user interface.
Micro Computers / Personal Computer:
It can be defined as a small, relatively inexpensive computer designed for an individual user.
Personal computers first appeared in the late 1970s. One of the first and most popular personal
computers was the Apple II, introduced in 1977 by Apple Computer. During the late 1970s and
early 1980s, new models and competing operating systems seemed to appear daily. Then, in
1981, IBM entered the fray with its first personal computer, known as the IBM PC.

6
Personal Computer Types
Actual personal computers can be generally classified by size and chassis / case. The chassis also
contains slots for expansion boards. If you want to insert more boards than there are slots, you
will need an expansion chassis, which provides additional slots. Then comes the portable
computers that are computers small enough to carry. Portable computers include notebook and
subnotebook computers, hand-held computers, palmtops, and PDAs.
The invention of microprocessor (single chip CPU) gave birth to the much cheaper micro
computers. They are further classified into
Desktop Computer
Notebook computer
Laptop computer
Subnotebook computer
Hand-held computer
Palmtop
PDA
Block Diagram of Microcomputer:

7
Bus: Bundle of wires, activated together to transfer information.
Address Bus: Unidirectional, carries address
If there are N address lines, CPU can address 2N
memory locations.
Example: for N=20, No of memory locations = 1,048,576
Data Bus: Bidirectional carries data
Control Bus (Signal): ???? Memory Read, Memory Write, I/O Read, I/O Write
Microcomputer BUS Operation:
1) Fetch the Instruction from the memory
◦ Fetches the operands of the Instruction from memory
2) Decode the Instruction using Instruction decoder.
3) Execute the Instruction into series of small actions
CPU continuously does the (Fetch-Decode-Execute) Cycle
Introduction to Microprocessors:
A Microprocessor or Microprocessor Unit (MPU) does the same task for Microcomputer as CPU
does for General Computer. The Size of Microprocessor is defined by its ALU.
Microprocessor Year of Invention ALU Size
INTEL 4004 1971 4 – bit
8008 1972 8 – bit
8080 1974 8 – bit
8085 1976 8 – bit
8086 1978 16 – bit

8
32-bit - 80286 (1982), 80386 (1985), 80486 (1989), Pentium (1993), Pentium II (1997),
Celeron and Pentium III (1999) and Pentium 4 (2000)
64-bit - Itanium (2001), Pentium 4 and Xeon (2005)
128-bit – Different types of Microcontrollers (after 2005)
A Microprocessor is silicon chip (IC) that contains the ALU where most of the calculations are
performed.
Microprocessors are distinguished by 3 characteristics
◦ Instruction set: the set of instructions that the microprocessor can execute.
◦ Bandwidth: the number of bits processed in each instruction.
◦ Clock speed: (MHz) It determines how many instructions/second the processor
can execute

9
Key Features of 8086 Microprocessors:
1) Upward compatible
2) Has six byte queue
3) 16-bit data bus
4) 20-bit address bus
5) +5 volt supply
6) Package: 40 pin DIP (Dual-in-line Package)
7) Operate in minimum and maximum mode
8) CPU clock rate : 5 MHz, 8MHz and 10 MHz
9) Work as Uniprocessor and multiprocessor
10) Powerful and flexible instruction set.
11) 256 Vectored interrupts
12) Fabrication Technology: H-MOS, N-channel, depletion load silicon gate
13) It has multiplexed address and data bus
Microprocessor Applications:
Toys : video games, programmable robots
Complex intelligent product controllers : VCR control and programming, security
systems, lighting system controllers
Computer peripherals: video display, higher-speed printers. Modems, plotters,
communication controllers.
Industrial controllers : robotics, processing control, sequence control, machine tool
control
Instruments : logic analyzers, communication analyzers, disk drive testers, digital
oscilloscopes, smart voltmeters.

10
Scope of this Course: Microprocessor & Assembly Language
Interrupts
o Interrupt Vector Table
o 8259A Priority Interrupt Controller
8087 Math Co-processor
o Architecture
o Data Types
o Instruction Set Programming
Numerical Problems
8086 Microprocessor
Hardware Software
Architecture –
Block Diagram
Functionality -
PIN Diagram
Instruction Set + Assembler
Directives + Assembly Language
Programs
Programming
Addressing Modes

11
Chapter 2
8086 Microprocessor Architecture
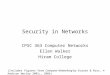
8086 Architecture / Block Diagram
8086 CPU is divided into two functional Units,
Bus Interface Unit (BIU) and
Execution Unit (EU)
The major reason for this separation is to increase the processing speed of the processor
The BIU has to interact with memory and input/output devices in fetching the instructions and
data required by the EU.
EU is responsible for executing the instructions of the programs and to carry out the required
processing.

12
Tasks of BIU
It sends out address.
It fetches instruction from memory.
It reads data from memory and ports.
It writes data to memory and ports.
Tasks of EU
It tells the BIU from where to fetch the instruction or data.
It decodes the fetched instruction.
It executes the decoded instruction.
Execution Unit (Detail Explanation)
Parts of Execution Unit
Control Unit
Arithmetic and Logical Unit (ALU)
Instruction Decoder (Not Shown in figure)
General Purpose Registers
Flag Register
Pointer and Index Register (Special Purpose Register)
Control Unit: Directs Internal Operation.
ALU: This 16 bit ALU can add, subtract, AND, OR, XOR, INC, DEC, complement or shift
binary numbers i.e it is responsible for all arithmetic and logical operation.
Instruction Decoder: It translates the instruction fetched from memory into a series of action
which the EU carries out.
General Purpose Register: 8086 has four 16 bit registers or eight 8 bit registers. The
advantage of using internal register for temporary storage of data is
that, it can be accessed more quickly since the data is already in
EU.

13
Category Bit Register Name
General Purpose Register 16 AX,BX,CX,DX
General Purpose Register 8 AH,AL,BH,BL,CH,CL,DH,DL
Pointer Register 16 SP (Stack Pointer)
BP (Base Pointer)
Index Register 16 SI (Source Index)
DI (Destination Index)
Segment Register 16 CS (Code Segment)
DS (Data Segment)
SS (Stack Segment)
ES (Extra Segment)
Instruction Pointer Register 16 IP (Instruction Pointer)
Status Register (Flag) 16 F
General Purpose Register:
Register Function
AX Accumulator Register
For arithmetic, logic and data transfer operation

14
BX Base Register
Also as address register
CX Count Register
Used for loop counter, shift and rotate bits
DX Data Register
Used in division and multiplication also I/O operation
16 bit register can be divided into two 8- bit register

15
Pointer & Index Register (Special Purpose Register) :
These registers are used to store relative shifting value (offset) for memory address location
There are 2 pointer registers:
Stack Pointer (SP) – point to the top of stack
Base Pointer (BP) – used to fetch data in data segment
There are 2 index registers:
Source Index (SI) – contains offset address for source operand in data segment
Destination Index (DI) - contains offset value for destination operand in segment
Flag Register:
It is a 16-bit register with each bit corresponding to a flip-flop. It changes its status according to
the stored output in the accumulator. A flag can control certain operation of the EU.
U – Undefined, R – Reserved

16
8086 has 16 bit flag register with 9 active flags, out of which 6 are conditional and 3 are control.
Flag Register
Conditional Flags (6)
1)Carry Flag
2)Parity Flag
3)Auxillary Flag
4)Zero Flag
5)Sign Flag
6)Overflow Flag
Control Flags (3)
1)Trap flag
2)Interrupt Enable flag
3)Direction flag

17
Bus Interface Unit (Detail Explanation)
Parts of Bus Interface Unit
Instruction stream byte queue
Segment Registers
Instruction Pointer
Instruction stream byte Queue (Six Byte):
While the Execution Unit is decoding or executing an instruction which does not
require the use of buses the BIU fetches upto six instruction byte for the following
instruction.
The BIU stores these prefetched bytes in a FIFO register set called a queue.
Fetching the next instruction while the current instruction executes is called
Pipelining.
8086 instructions vary from 1 to 6 bytes, when the EU is ready for its next
instruction, it reads the instruction byte for the instruction from the queue in BIU.
Fetch and execution are taking place parallel, in order to improve the
performance of the microprocessor.
Segment Registers:
8086 BIU sends out 20 bit addresses, so it can address upto 220
or 1,048,576 bytes
in memory. However at any given time the 8086 works with only four 65536 byte
(64KB) logical segments within this 1MB range.
Four segment registers in the BIU are used to hold the upper 16 bits of the initial
addresses of four memory segments that the 8086 is working with at a particular
time.

18
These 16 bit Segment registers are Code Segment Register, Data Segment
Register, Stack Segment Register and Extra Segment Register.
Hardwired Zero: BIU always insert a zero (lowest 4 bits) to make the address
20 bit is called as hardwired zero.
Segment in 8086 Memory:
The Memory of 8086 is divided into four 64 KB logical segments
Segment Usage
Code (CS) Space to store program that will be executed
Data (DS) Space to store data that will be processed
Stack (SS) Special space to store information needed by microprocessor to
execute subroutine or interrupt service. Offset address is stored
in 16-bit stack pointer register
Extra (ES) Function is the same as DS
Segments can be adjacent, disjoint, partially overlap or fully overlap.

19
Instruction Pointer:
It is a 16-bit register used to store the 16-bit effective address for CS
register.
Each time instruction is fetched from memory to be executed in processor,
IP content will be added so that it always show to the next instruction .
If it is branch instruction, the IP content will be loaded with new value
which is the branch address.
Base address: Offset address Notation
Address of 20 bit in 8086 is generally represented as Base Address: Offset address
Notation.
16 bit Base address is stored in one of the segment register and 16 bit of offset
address is stored in special purpose register.
Default Segment Register: Offset Pair.
CS:IP
DS:SI
ES:DI
SS:SP

20
Physical Address Generation
Segment addresses must be stored in segment registers.
Effective address / Offset is derived from the combination of pointer registers, the
Instruction Pointer (IP), and immediate values .
Examples:

21
Memory Banking:
In 8086 there is 20 bit address bus, so it can address 1,048,576 addresses.
At each address we can store 8 bit address (1-byte)but if want to write a word (16-bit) into a
memory segment to store data in byte form then we write the data in two consecutive memory
address which are even (low) and odd (high) memory.
*This concept will be more clear in the Chapter of Addressing modes.

22
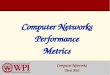
PIN Diagram of 8086
Signal Description of 8086:
AD15±AD0
ADDRESS DATA BUS: These lines constitute the time multiplexed memory/IO address and
data bus.
ALE
Address Latch Enable. A HIGH on this line causes the lower order 16 bit address bus to be
latched that stores the addresses and then, the lower order 16 bit of the address bus can be used
as data bus.
READY
READY is the acknowledgement from the addressed memory or I/O device that it will complete
the data transfer.

23
INTR
INTERRUPT REQUEST: is a level triggered input which is sampled during the last clock cycle
of each instruction to determine if the processor should enter into an interrupt acknowledges
operation. A subroutine is vectored to via an interrupt vector lookup table located in system
memory. It can be internally masked by software resetting the interrupt enable bit. INTR is
internally synchronized. This signal is active HIGH.
INTA'
Interrupt Acknowledge from the Microprocessor.
NMI
NON-MASKABLE INTERRUPT: an edge triggered input which causes an interrupt request to
the MP. A subroutine is vectored to via an interrupt vector lookup table located in system
memory. NMI is not maskable internally by software.
RESET: causes the processor to immediately terminate its present activity. The signal must be
active HIGH for at least four clock cycles. It restarts execution
MN/MX' (pin number 33)
MINIMUM/MAXIMUM: indicates what mode the processor is to operate in. The two modes are
discussed in the following sections.
M/IO': Differentiate between the Memory and I/O operation. A LOW on this pin indicated I/O
operation and a HIGH indicated a Memory Operation
HOLD : The 8086 has a pin called HOLD. This pin is used by external devices to gain control of
the busses.
HLDA :
When the HOLD signal is activated by an external device, the 8086 stops executing instructions
and stops using the busses.
8086 MINIMUM AND MAXIMUM MODES of operation
MN/MX Minimum mode: The 8086 processor works in a single processor environment. All control
signals for memory and I/O are generated by the microprocessor.
Maximum mode is designed to be used when a coprocessor exists in the system. 8086 works in a
multiprocessor environment. Control signals for memory and I/O are generated by an external
BUS Controller.
*Timing diagrams are beyond the scope of this Course

24
Chapter 3
Addressing Modes of 8086 Microprocessor
Addressing Mode:
Study of addressing mode is first step towards assembly language programming. An assembly
language program statement is written in a form that has four fields
Label / Address Opcode Operand Comment
NEXT / 2000:0100 MOV AX, BX Copy the contents of
BX to AX
Addressing mode is a technique to determine which operand is to be fetched.
(Opcode : Operation to be performed; Operand = argument for an operator or for machine
language instruction i.e data to be operated on)
Addressing modes Characteristics:
1. It give flexible programming to user
2. It uses pointers to memory,
3. Has counter for loop control,
4. Index for data and program replacement
5. Reduce bit numbers in address field for an instruction
There are basically 4 types of addressing mode in 8086 register:
1. Immediate Addressing Mode
2. Register Addressing Mode
3. Memory Addressing Modes
3.1 Direct Addressing Mode
3.2 Register Indirect Addressing Mode
3.3 Based Addressing Mode
3.4 Indexed Addressing Mode
3.5 Based Indexed Addressing Mode
4. Relative Addressing Modes
4.1 Register Relative Addressing Mode
4.2 Based Relative Addressing Mode
4.3 Index Relative Addressing Mode
4.4 Base Indexed Relative Addressing Mode

25
Immediate addressing mode and register addressing mode does not require BUS, as
communication is inside the microprocessor, whereas Memory and Relative addressing mode
requires BUS for fetching the data from memory.
As we have studies earlier that Physical /Actual address is combination of Base address and
effective address, so if you want the data stored in memory the first step is to find out the
physical address of that particular memory location.
Immediate Addressing:
Here the immediate data, is part of instruction, and appears in the form of successive byte or
bytes.
MOV Destination, Source
Ex. MOV AX, 5678
Register Addressing:
Here the data is stored in a register and it is referred using the particular register.
All the registers, except IP, may be used in this mode
MOV Destination, Source
Ex. MOV AX, BX
Memory addressing modes
Before coming to memory and relative addressing mode we will see the General formula to
calculate the Physical Address
General Formula:
Physical Address = Base Address + Effective Address
= [DS/ES/SS/CS] * 10H + [BX/BP]+[SI/DI]+8/16 bit displacement
# 16 decimal is equal to 10 hexadecimal , Solve
(16)10 = (10)16

26
a) Direct addressing Mode :
In this mode, a 16-bit memory address (offset) is directly specified in the
instruction as a part of it.
MOV AX, offset
Ex. MOV AX, [5000H]
This means offset = 5000 , add it to base address (already specified in question, generally
DS) obtain physical address, go to that physical address, obtain data and put this data in
AX
Ex: DS = 2100, offset = 5000 so physical address = 2100*10 + 5000 = 26000, go to 26000
obtain LSB, copy it to AL, go to 26001 obtain MSB, copy it to AH (Memory banking)
Here point to be noted is that, we don’t know the value of data which actually moves into AX.
b) Register Indirect addressing:
In this mode, the address of the memory location which contains data or operand
is determined in an indirect way, using offset registers.
The offset address of data is in either BX or SI or DI registers.
The default segment is either DS or ES.
MOV AL, [SI]
(or) MOV AX, [BX]
(or) MOV AX, [DI]
c) Based Memory addressing:
In this mode, offset of the operand is stored in one of the base registers.
The offset address of data is in either BX or BP.
MOV AX, [BX]
(or) MOV AX, [BP]
d) Indexed memory addressing:
In this mode, offset of the operand is stored in one of the index registers.
DS is the default segment for index registers SI and DI.
MOV [SI], AL
(or) MOV AX, [DI]

27
e) Based indexed memory addressing:
The effective address is formed, by adding content of a base register (BX or BP)
to the content of an index register (SI or DI).
The default segment register may be ES or DS
MOV AX, [BX] [SI]
MOV [BX] [DI], AL
Relative addressing modes
a) Register relative addressing mode
MOV AX, [BX] + offset
b) Based relative addressing mode
MOV AX, [BX] + offset
c) Indexed relative addressing mode
MOV AX, [DI] + offset
d) Based Index relative addressing mode
MOV AX, [BX] [DI] + offset
Question: The contents of different registers are given below. Form Physical addresses for all
memory addressing modes.
Offset = 0050, DS = 2100, BX=0500, DI= 1000 (All numbers in hexadecimal)
Solution:
(1) Immediate Addressing Mode
MOV AX, 0500
(2) Register Addressing Mode
MOV AX, BX

28
(3) Memory addressing modes
(Add 0 at the end of the address AX, which is called as hard-wired 0)
(a) Direct addressing mode
MOV AX, offset
Physical Address (PA) = 2100 0
+ 0050
-------------
21050
-------------
(b) Register Indirect addressing mode
MOV AX, [BX] (or) MOV AX, [DI]
Physical Address (PA) = 2100 0
+ 0500
-------------
21500
-------------
Physical Address (PA) = 2100 0
+1000
-------------
22000
c) Based Memory addressing mode
MOV AX, [BX]
Physical Address (PA) = 2100 0
+ 0500
-------------
21500
-------------
d) Indexed memory addressing mode
MOV AX, [DI]
Physical Address (PA) = 2100 0
+ 1000
-------------
22000
-------------

29
e) Based indexed memory addressing mode
MOV AX, [BX] [DI]
Physical Address (PA) = 2100 0
0500
+ 1000
-------------
22500
-------------
Relative addressing modes
a) Register relative addressing mode
MOV AX, [BX] + offset
Physical Address (PA) = 2100 0
0500
+ 0050
-------------
21550
-------------
b) Based relative addressing mode
MOV AX, [BX] + offset
Physical Address (PA) = 2100 0
0500
+ 0050
-------------
21550
-------------
c) Indexed relative addressing mode
MOV AX, [DI] + offset
Physical Address (PA) = 2100 0
1000
+ 0050
-------------
22050

30
-------------
d) Based Index relative addressing mode
MOV AX, [BX] [DI] + offset
Physical Address (PA) = 2100 0
0500
1000
+ 0050
-------------
22550
-------------
ASSIGNMENT:
Q – 1. The contents of different registers are given below. Form Physical addresses for all
memory addressing modes.
Offset (displacement) = 5050, AX = 1100, BX=2100, SI= 0300, DI= 0400 BP = 5000, SP =
6000 CS = 7000, DS = 9000, SS = 2000, IP = 7000 (All numbers in hexadecimal)
Q – 2. The contents of different registers are given below. Form Physical addresses for all
memory and relative addressing modes.
Offset (displacement) = 5000, AX = 1000, BX=2000, SI=3000,DI=4000 BP = 5000,
SP = 6000 CS = 7000, DS = 1000, SS = 2000, IP = 7000 (All numbers in hexadecimal)
Q – 3. If CS = 2000, IP = 0100, DS = 5000, BX = 0200, SI = 0010, Displacement ARRAY =
0050. Find Physical address for all types of memory addressing mode.
Q – 4. If DS = 1200, BX = 0900, SI = 0800, Displacement DISP = 5000. Find Physical address
for all types of relative addressing mode.
Q – 5. If DS = 3500, BX = 1200, SI = 3000, Displacement OFFSET = 1000. Find Physical
address for all types of memory addressing mode.

31
Instruction Set of 8086
Data Transfer Arithmetic Bit Manipulation String Program Transfer Process Group Group Group Instruction Instruction Control Instruction
Logical Shift Rotate
Addition Subtraction Multiply Divide Unconditional Conditional Iteration Interrupt Control Instruction
General Input / Address Flag Purpose Output Object Transfer Flag operation External synchronization No operation

32
CHAPTER – 4
Instruction Set of 8086 Microprocessor
Benefits of Assembly Language Programming
1) It takes up less memory
2) It executes much faster
3) Used for real time applications
4) Good for controlling hardware devices
5) Also performs pure software operations
DATA TRANSFER INSTRUCTIONS
(1) MOV: Move instruction transfers data from one register/memory
location to another register/memory location.
MOV Destination, Source
Ex. MOV AX, BX
MOV AX, [SI]
Note: Both, source and destination cannot be memory locations
(2) PUSH: Push to Stack. This instruction pushes the contents of the specified
register/memory location on to the stack.
PUSH Source
Ex. PUSH AX
PUSH DS
Note: Push operates only on 16-bit data
(3) POP: Pop from Stack. This instruction pops the contents of the specified
register/memory location off the stack.
POP destination
Ex. POP AX
(4) XCHG: Exchange byte or word
XCHG CX, BX
(Contents of BX & CX will be swapped)
Note: Exchange of contents of two memory locations is not permitted.

33
(5) XLAT: Translate or replace byte. This instruction is used to translate a byte from one
code to another code.
DATA TRANSFER INSTRUCTIONS – INPUT / OUTPUT
(1) IN: Input the port. This instruction is used for reading an input port.
IN AX, Port address
Ex. IN AX, 03
(here 03 is port address not data)
(2) OUT: Output to the port. This instruction is used for writing to an output port.
OUT Port address, AX
Ex. OUT 03, AX
(here 03 is port address not data)
DATA TRANSFER INSTRUCTIONS – ADDRESS OBJECT
(1) LEA: Loads Effective Address. This instruction loads the effective address by
destination operand into the specified source register.
LEA register, source
Ex: LEA BX, Total
(2) LDS / LES: Load pointer with DS/ES. This instruction loads the DS or ES register and
specified destination register with the content of memory location specified as source in the
instruction.
LDS register, source Ex: LDS BX, Total
LES register, source Ex: LES BX, Total
Two memory locations will be copied to ES and next two memory locations will be
copied to BX.
Note: Source cannot be a register
DATA TRANSFER INSTRUCTIONS – FLAG TRANSFER
(1) LAHF: Loads AH from Lower Byte of Flag
(2) SAHF: Store AH to Lower Byte of Flag Register
(3) PUSH F: Push flags to stack

34
(4) POP F: POP flags from stack
ARITHMETIC INSTRUCTIONS
ARITHMETIC INSTRUCTIONS – ADDITION
(1) ADD: Add byte or word
ADD destination, source
Ex: ADD AX, BX ; AX AX + BX
Note: Register cannot be segment register
(2) ADC: Add byte or word with Carry
ADC destination, source with carry
Ex: ADC AX, BX ; AX AX + BX + Carry Flag
(3) INC: Increment byte or word by 1
INC destination
Ex: INC AX ; AX AX + 1
(4) AAA: ASCII adjust after addition
(5) DAA: Decimal adjust for addition
ARITHMETIC INSTRUCTIONS – SUBTRACTION
1) SUB: Subtract byte or word
SUB destination, source
Ex. SUB AX, BX ; AX AX - BX
2) SBB: Subtract byte or word with borrow
Ex. SBB AX, BX
3) DEC: Decrement byte or word by 1
DEC destination ; destination = destination - 1
Ex: DEC AX ; AX AX - 1
4) AAS: ASCII adjust after Subtraction

35
5) DAS: Decimal adjust for Subtraction
6) NEG: Negate byte or word
Ex. NEG AX
Note: NEG instruction do 2’s complement of number
7) CMP: Compare byte or word
Ex. CMP AX, BX
This instruction performs subtraction but result is not stored anywhere, only flags are
affected
FLAG AX>BX AX=BX AX<BX
CF 0 0 1
ZF 0 1 0
SF 0 0 1
ARITHMETIC INSTRUCTIONS – MULTIPLICATION
1) MUL: Multiply byte or word unsigned or word by the contents of AL.
MUL source
Ex. MUL BX
2) IMUL: Integer Multiply byte or word
IMUL source
Ex. IMUL CX
3) AAM: ASCII adjust after Multiplication
ARITHMETIC INSTRUCTIONS – DIVISION
1) DIV: Divide byte or word unsigned
DIV source
Ex. DIV BX

36
2) IDIV: Integer Divide byte or word
IDIV source
3) AAD: ASCII adjust for Division
4) CBW: Convert byte to word
5) CWD: Convert word to double word
BIT MANIPULATION INSTRUCTIONS
LOGICAL INSTRUCTIONS: (bit by bit)
1) NOT: NOT byte or word (1’s Complement)
NOT destination
Ex. NOT BX
2) AND: AND byte or word
AND destination, source
Ex. AND AX, BX
3) OR: OR byte or word
OR destination, source
Ex. OR AX, BX
4) XOR: Exclusive OR byte or word
XOR destination, source
Ex. XOR AX,BX
5) TEST: Logical Compare Instruction - Test byte or word
TEST destination, source
Ex. TEST AX, BX

37
BIT MANIPULATION INSTRUCTION – SHIFT
1) SHL / SAL: Shift logical / Arithmetic left byte or word.
This instruction shift the operand word or byte, bit by bit to the left and insert
zeros in the newly introduced least significant bits (LSBs).
SHL destination, count
Ex. SHL BX, 04 (if BX = 1010 1111 1100 0110)
Result: 1111 1100 0110 0000
2) SHR: Shift logical right byte or word
This instruction performs bit-wise right shifts on the operand word or byte that
resides in a register or a memory location, by the specified count in the instruction and
inserts zeros in the shifted positions.
SHR destination, count
Ex. SHR BX, 04 (if BX = 1010 1111 1100 0110)
Result: 0000 1010 1111 1100
3) SAR: Shift Arithmetic right byte or word
This instruction performs right shifts on the operand word or byte that may be a register
or a memory location by the specified count in the instruction. It inserts the most significant
bit (MSB) of the operand in the newly inserted position. The result is stored in the destination
operand.
SAR destination, count
Ex. SAR BX, 04 (if BX = 1010 1111 1100 0110)
Result: 1111 1010 1111 1100

38
BIT MANIPULATION INSTRUCTION – ROTATE
1) ROL: Rotate Left byte or word without Carry
This instruction rotates the content of the destination operand to the left by the
specified count (bit-wise) excluding carry. The most significant bit (MSB) is
pushed into the carry flag as well as the LSB position at each operation.
ROL destination, count
Ex. ROL BX, 04 (if BX = 1010 1111 0010 1100 )
Result: 1111 0010 1100 1010
2) ROR: Rotate right byte or word without Carry
This instruction rotates the content of the destination operand to the right by the
specified count (bit-wise) excluding carry. The least significant bit (LSB) is
pushed into the carry flag as well as the MSB position at each operation.

39
ROR destination, count
Ex. ROR BX, 04 (if BX = 1010 1111 0010 1100 )
Result: 1100 1010 1111 0010
3) RCL: Rotate left byte or word through Carry
This instruction rotates the content of the destination operand to the left by the
specified count (bit-wise) through the carry flag. For each operation, the carry flag is
pushed into LSB, and the MSB operand is pushed into carry flag. The remaining bits are
shifted left by the specified positions.
RCL destination, count
CF
Ex. RCL BX, 01 (if BX = 0 1010 1111 0010 1100
Result: 1 0101 1110 0101 100 0
4) RCR: Rotate through carry right byte or word
This instruction rotates the contents of the destination operand right by the
specified count (bit-wise) through the carry flag. For each operation, the carry flag is
pushed into MSB, and the LSB operand is pushed into carry flag. The remaining bits are
shifted right by the specified positions.
RCR destination, count
CF
Ex. RCR BX, 01
(if BX = 1010 1111 0010 1101 0
Result: 0101 0111 1001 0110 1
STRING MANIPULATION INSTRUCTIONS
1) CMPS: Compare two string byte or string word. The length of the string must be stored
in the register CX. If both the byte or the word strings are equal, zero flag is set.
2) MOVSB / MOVSW: String bytes or string words are moved to another set of destination
locations.
3) SCAS: Scan string byte or string word.

40
4) LODS: Load String Byte or string word.
5) STOS: Store String Byte or String word.
PROGRAM TRANSFER INSTRUCTIONS
Unconditional Branch Instructions
(1) CALL: Unconditional Call – Call a procedure.
NEAR CALL: Call a procedure in the same segment
FAR CALL: Call a procedure in some other segment
(2) RET: Return from the Procedure. At the end of the procedure, the RET instruction must
be executed.
(3) INT N: Interrupt type N.
(Discussed in detail in chapter 6 - Interrupts)
(4) JMP: Unconditional Jump – transfers the control of execution to the specified address
using a displacement.
(5) IRET: Return from ISR - when ISR is executed, the values of IP,CS and flags are
retrieved from the stack to continue the execution of the main program.
(6) LOOP: Loop unconditionally – this instruction executes the part of the program from
the label, specified in the instruction up to the loop instruction, CX number of times.

41
Important Conditional Branch Instruction
JC Jump if carry
JZ/JE Jump if Zero
JNC Jump if no carry
JNE/JNZ Jump if no zero
Unconditional Branch Instructions
CALL Call Procedure
RET Return from Procedure
JMP Jump
Iteration Control
LOOP Loop unconditionally
LOOPE/LOOPZ Loop if equal / zero
LOOPNE/LOOPNZ Loop if not equal/not zero
JCXZ Jump if register CX=0
Interrupts
INT Interrupt
INTO Interrupt if overflow
BOUND Interrupt if out of array bounds
IRET Interrupt return
Flag Operations
STC Set Carry Flag
CLC Clear Carry Flag CMC Complement Carry Flag STD Set Direction Flag CLD Clear Direction Flag STI Set Interrupt Flag CLI Clear Interrupt Flag

42
External Synchronization
HLT Halt until interrupt or reset
WAIT Wait for TEST pin active
ESC Escape to external processor
LOCK Lock bus during next instruction
NOP - No Operation

43
CHAPTER – 5
Assembler Directives of 8086 Microprocessor
• An assembler is a program used to convert an assembly language program into the
equivalent machine code modules which may further converted to executable codes.
• Assembler directives give instruction to the assembler to prepare the codes.
• The popular assemblers like the Intel 8086 macro assembler, the turbo assembler and the
IBM macro assembler use common assembler directives
Important Directives
DB: Define Byte - The DB directive is used to reserve byte or bytes of memory locations in
the available memory
Examples:
RANKS DB 01H, 02H ; reserve 2 memory locations & initialize the
values specified
NAME DB ‘JAZAN’; reserve number of characters in the string &
initialize those locations by the ASCII equivalent
characters.
VALUE DB 25H ; reserve 25H memory byte & uninitialized.
DW: Define Word – DW directive serves the same purposes as the DB directive, but
reserves the number of memory words (16-bit).
Example:
WORDS DW 1234H, 09ACH ; reserves 2 words in memory (4 bytes), &
initialize the values specified.
DQ: Define Quadword – DQ directive is used to direct the assembler to reserve 4 words (8
bytes) of memory for the specified variable and may initialize it with the specified values.
DT: Define Ten Bytes – DT directive directs the assembler to define the specified variable
equiring 10-bytes for its storage and initialize the specified values.

44
ASSUME: Assume Logical Segment Name – used to inform the assembler, the names of
the logical segments to be assumed for different segments used in the program.
Examples:
ASSUME CS:CODE; directs the assembler that the machine codes are
available in a segment named CODE, and CS register is loaded
with the codes.
ASSUME DS: DATA; directs the assembler that the data are available in a logical
segment named DATA, and DS register is loaded with the data.
Note: The ASSUME statement is a must at the starting of each assembly language
program.
END: END of Program – The END directive marks the end of the assembly language program.
Program statements after the END statement will be ignored.
ENDP: END of Procedure – In assembly language programming, procedure / subroutines are
called by the main program. The ENDP directive is used to indicate the end of the procedure. A
procedure is usually assigned by a name, i.e., label, and to mark the end of the procedure, the
name of the procedure, i.e., label may appear as a prefix with the ENDP directive.
Example:
PROCEDURE ABC
-----
-----
-----
ABC ENDP
ENDS: END of Segment – This directive marks the end of a logical segment. The logical
segments are assigned with the names using the ASSUME directive. The names appear with the
ENDS directive as prefixes to mark the end of those particular segments.
Example:
DATA SEGMENT
-------
-------
DATA ENDS
ASSUME CS : CODE, DS : DATA
CODE SEGMENT
-----
-----
CODE ENDS

45
END
EXAMPLE PROGRAMS
1. Write a Program in TASM to Add two 16 bit numbers.
DATA SEGMENT
NUM1 DW 4321H
NUM2 DW 1234H
RESULT DW ?
CARRY DB 00H
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
START: MOV AX,DATA
MOV DS,AX
MOV AX,NUM1
ADD AX,NUM2
JNC JUMP
MOV CARRY,01H
JUMP: MOV RESULT,AX
INT 03H
CODE ENDS
END START
2. Write a Program in TASM to subtract two 16 bit numbers.
DATA SEGMENT
NUM1 DW 4321H
NUM2 DW 1234H
RESULT DW ?
BORROW DB 00H
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
START:MOV AX,DATA
MOV DS,AX
MOV AX,NUM1
SUB AX,NUM2
JNC JUMP

46
MOV BORROW,01H
JUMP:MOV RESULT,AX
INT 03H
CODE ENDS
END START
3. Write a Program in TASM to multiply two 16 bit numbers.
DATA SEGMENT
NUM1 DW 4321H
NUM2 DW 1234H
RESULT DD ?
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
START: MOV AX,DATA
MOV DS,AX
MOV DX,0000H
MOV AX,NUM1
MUL NUM2
MOV WORD PTR RESULT,AX
MOV WORD PTR RESULT+2,DX
INT 03H
CODE ENDS
END START
4. Write a Program in TASM to divide two 16 bit numbers.
DATA SEGMENT
NUM1 DW 4321H
NUM2 DW 1234H
REM DW ?
QUO DW ?
RESULT DD ?
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
START: MOV AX,DATA
MOV DS,AX
MOV DX,0000H
MOV AX,NUM1
DIV NUM2

47
MOV QUO,AX
MOV REM,DX
INT 03H
CODE ENDS
END START
5. Write a program in Assembly language to find out the number of even and odd numbers
from a given series of 16-bit hexadecimal numbers.
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
LIST DW 2357H, 0A579H, 0C322H, 0C91EH, 0C000H, 0957H
COUNT EQU 006H
DATA ENDS
CODE SEGMENT
START: XOR BX, BX
XOR DX, DX
MOV AX, DATA
MOV DS, AX
MOV CL, COUNT
MOV SI, OFFSET LIST
AGAIN: MOV AX, [SI]
RCR AX, 01
JC ODD
INC BX
JMP NEXT
ODD: INC DX
NEXT: ADD SI, 02
DEC CL
JNZ AGAIN
MOV AH, 4CH
INT 21H
CODE ENDS
END START

48
CHAPTER – 6
8086 Interrupts
INTERRUPTS
There are two main types of interrupt in the 8086 microprocessor, internal and external
hardware interrupts. Hardware interrupts occur when a peripheral device asserts an
interrupt input pin of the microprocessor. Whereas internal interrupts are initiated by the
state of the CPU (e.g. divide by zero error) or by an instruction.
Provided the interrupt is permitted, it will be acknowledged by the processor at the end of
the current memory cycle. The processor then services the interrupt by branching to a
special service routine written to handle that particular interrupt. Upon servicing the
device, the processor is then instructed to continue with what is was doing previously by
use of the "return from interrupt" instruction.
The status of the program being executed must first be saved. The processors registers
will be saved on the stack, or, at very least, the program counter will be saved. Preserving
those registers which are not saved will be the responsibility of the interrupt service
routine. Once the program counter has been saved, the processor will branch to the
address of the service routine.
Edge or Level sensitive Interrupts
Edge level interrupts are recognized on the falling or rising edge of the input signal. They
are generally used for high priority interrupts and are latched internally inside the
processor. If this latching was not done, the processor could easily miss the falling edge
(due to its short duration) and thus not respond to the interrupt request.
Level sensitive interrupts overcome the problem of latching, in that the requesting device
holds the interrupt line at a specified logic state (normally logic zero) till the processor
acknowledges the interrupt. This type of interrupt can be shared by other devices in a
wired 'OR' configuration, which is commonly used to support daisy chaining and other
techniques.
Maskable Interrupts
The processor can inhibit certain types of interrupts by use of a special interrupt mask bit.
This mask bit is part of the flags/condition code register, or a special interrupt register. In

49
the 8086 microprocessor if this bit is clear, and an interrupt request occurs on the
Interrupt Request input, it is ignored.
Non-Maskable Interrupts
There are some interrupts which cannot be masked out or ignored by the processor. These
are associated with high priority tasks which cannot be ignored (like memory parity or
bus faults). In general, most processors support the Non-Maskable Interrupt (NMI). This
interrupt has absolute priority, and when it occurs, the processor will finish the current
memory cycle, then branch to a special routine written to handle the interrupt request.
Advantages of Interrupts
Interrupts are used to ensure adequate service response times by the processing.
Sometimes, with software polling routines, service times by the processor cannot be
guaranteed, and data may be lost. The use of interrupts guarantees that the processor will
service the request within a specified time period, reducing the likelihood of lost data.
Interrupt Latency
The time interval from when the interrupt is first asserted to the time the CPU recognises
it. This will depend much upon whether interrupts are disabled, prioritized and what the
processor is currently executing. At times, a processor might ignore requests whilst
executing some indivisible instruction stream (read-write-modify cycle). The figure that
matters most is the longest possible interrupt latency time.
Interrupt Response Time
The time interval between the CPU recognising the interrupt to the time when the first
instruction of the interrupt service routine is executed. This is determined by the
processor architecture and clock speed.
The Operation of an Interrupt sequence on the 8086 Microprocessor:
1. External interface sends an interrupt signal, to the Interrupt Request (INTR) pin, or an
internal interrupt occurs.
2. The CPU finishes the present instruction (for a hardware interrupt) and sends Interrupt
Acknowledge (INTA) to hardware interface.
3. The interrupt type N is sent to the Central Processor Unit (CPU) via the Data bus from
the hardware interface.

50
4. The contents of the flag registers are pushed onto the stack.
5. Both the interrupt (IF) and (TF) flags are cleared. This disables the INTR pin and the
trap or single-step feature.
6. The contents of the code segment register (CS) are pushed onto the Stack.
7. The contents of the instruction pointer (IP) are pushed onto the Stack.
8. The interrupt vector contents are fetched, from (4 x N) and then placed into the IP
and from (4 x N +2) into the CS so that the next instruction executes at the interrupt
service procedure addressed by the interrupt vector.
9. While returning from the interrupt-service routine by the Interrupt Return (IRET)
instruction, the IP, CS and Flag registers are popped from the Stack and return to their
state prior to the interrupt.
Basic Definitions
Interrupt request: a signal that needed immediate attention
Interrupt processing: what CPU does in response to request
Interrupt service: what is done in software as a result
• 2 General Types of Interrupts:
External - generated outside CPU by other hardware
Internal - generated within CPU as a result of instruction or operation
• 8086 Terminology for Interrupts:
1) Hardware Interrupt – External, uses INTR and NMI control bus lines
2) Software Interrupt – Internal, from int or into
3) Processor Interrupt – traps, exceptions

51
8086 External Interrupt Connections
Interrupt Vector Table
• x86 has 256 interrupts, specified by Type Number or Vector
• 1 byte of data must accompany each interrupt; specifies Type
• Vector is a pointer (address) into Interrupt Vector Table, IVT
– IVT is stored in memory from 0000:0000 to 0000:03ffh
• IVT contains 256 far pointer values (addresses)
– Far pointer is CS:IP values
• Each far pointer is address of Interrupt Service Routine, ISR
– Also referred to as Interrupt Handler

52
INTERRUPT VECTOR ASSIGNMENT
Type Function Comment
0 Divide Error Processor - zero or overflow
1 Single Step (DEBUG) Processor - TF=1
2 Nonmaskable Interrupt Pin Processor - NMI Signal
3 Breakpoint Processor - Similar to Sing Step
4 Arithmetic Overflow Processor - into
5 Print Screen Key BIOS - Key Depressed
6 Invalid Opcode Processor - Invalid Opcode
7 Coprocessor Not Present Processor - no FPU
8 Time Signal BIOS - From RT Chip (AT - IRQ0)
9 Keyboard Service BIOS - Gen Service (AT - IRQ1)
A - F Originally Bus Ops (IBM PC) BIOS - (AT - IRQ2-7)
10 Video Service Request BIOS - Accesses Video Driver
11 Equipment Check BIOS - Diagnostic

53
12 Memory Size BIOS - DOS Memory
13 Disk Service Request BIOS - Accesses Disk Driver
14 Serial Port Service Request BIOS - Accesses Serial Port Drvr
15 Miscellaneous BIOS - Cassette, etc.
16 Keyboard Service Request BIOS - Accesses KB Driver
Software Interrupts
The 8086 has five predefined interrupts.
Type 0 - Divide error
Type 1 - Single step (Trap flag TF set)
Type 2 - NMI (non-maskable interrupt)
Type 3 - One byte software interrupt for breakpoints
Type 4 - Interrupt on Overflow
Except for type 1, these interrupts can not be disabled, although only type 2 can
occur without specific action by the programmer.
The type 2 interrupt is caused by a low to high transition on the NMI pin of the
8086. This is usually used for emergencies such as a power failure.
External interrupts are maskable by setting the IF flag to zero. These interrupts are
activated by the INTR input pin on the 8086 being asserted while IF = 1.
With external interrupts, the interrupt type is put on the data bus by the
external interrupt controller and read in by the 8086. This occurs during the
second of two interrupt acknowledge cycles.
Interrupt Instructions
The following instructions deal with interrupts.
STI - set IF
CLI - clear IF
INT n - software interrupt, execute interrupt service routine n.
Note n = 3 is the single byte opcode used for breakpoints.
MS-DOS uses this instruction, rather than procedure calls, for
operating system functions.
INTO - interrupt on overflow.
HLT - halt, i.e., wait for interrupt.
IRET - interrupt return (pops IP, CS, and Flags).
The IRET instruction pops the flag register off the stack with IF=1. If IF was
not set, the interrupt could not have occurred in the first place.

54
Note that the Flag register is sometimes referred to as the processor status word or
PSW.
External Interrupts
Assume that IF = 1 and INTR goes high. The following operations occur.
• The current instruction finishes executing.
• The Flags are pushed onto the stack.
• IF is cleared disabling further interrupts. TF is cleared if single stepping.
• CS and IP is pushed onto the stack.
• The first INTA’ is sent to the external interrupt control logic.
• The second INTA’ pulse signals the interrupt control logic to put the vector
number (or type) on the data bus.
• The cpu reads the vector number and multiplies it by four to get the vector
location.
• The CS and IP (vector) of the interrupt service routine (ISR) are loaded.
• The ISR begins executing.
Interrupt Priorities
When several external devices can request interrupts, you often need to assign
priorities as certain interrupts may be more important than others.
This can be done in several ways.
1. Polling - The interrupt requests are all ORed together and the interrupt
service routine reads the status of the devices that could cause an interrupt. The
order of polling sets the priority, i.e., if two devices are requesting an interrupt at
the same time, the first one polled is handled.
2. Daisy Chain - The cable from the computer goes to the most important device,
then from that device to the next most important device, etc. The interrupt
acknowledge is passed from device to device until the device requesting the
interrupt is reached.
3. Priority Management Hardware - Logic prioritizes a number of interrupt
requests and generates one interrupt request to the processor. The standard device
for this purpose is the 8259A Priority Interrupt Controller (PIC). This device can
handle 8 interrupt requests. It can also operate in a master/slave mode where up to
8 slave 8259A’s can be connected to the eight request lines of the master so that up
to 64 external interrupt requests can be handled. The PC-XT has one 8259A and 8
hardware interrupts. The PC-AT has a master and one slave so it can handle 15
hardware interrupts.

55
INTERRUPT PRIORITY
Divide Error, INT n, INTO
Highest
NMI ↓
INTR ↓
Single stepping Lowest
8259A Priority Interrupt Controller

56
Functionality of 8259A
Basic Functions of the 8259A PIC
1. Resolve the priority of the interrupt requests.
2. Issue a single interrupt request to the CPU.
3. Send the interrupt vector number to the CPU.
Status
Can read three registers
1. The Interrupt Request Register (IRR) stores all requests.
2. The In-Service Register (ISR) stores all interrupt levels being serviced.
3. The Interrupt Mask Register (IMR) stores the interrupt request lines being
masked.
The status can be read by writing a suitable command word and then reading.
Nested Interrupts

57
An Example of Actions Taken When Using Fully Nested Interrupts
IR0 is the highest priority interrupt and IR7 is the lowest.
1. Interrupt Flag (IF) is set but no interrupts are in progress.
2. IR2 and IR4 arrive and IR2 is acknowledged as it has the higher priority. In-
service register
bit 2 (ISR2) is set.
3. The IR2 interrupt service routine sets IF. IR1 arrives and interrupts IR2 since
IR1 has a higher
priority and IF=1. ISR1 is now set.
4. IR1 service routine clears ISR1 by sending end-of-interrupt (EOI) command but
further
interrupts can not occur until IF is set. IF is set but nothing happens since no new
high priority
interrupt requests have arrived. The interrupt return takes us back to the IR2
service routine.
5. The IR2 routine sends EOI command clearing ISR2. IR4 is pending, no ISR bits
are set, and
IF=1 so interrupt 4 occurs. ISR4 is set.
6. IR3 arrives but nothing happens since IF is still zero.
7. IF is set and interrupt 3 occurs since it has higher priority than 4. ISR3 and ISR4
are set.
8. The IR3 service routine clears ISR3, sets IF, nothing happens since no new
interrupts are
pending, and the IRET instruction takes us back to the IR4 routine.
9. The EOI command in the IR4 routine clears ISR4. The IRET takes us back to
the IR2 routine.
10. The IRET in the IR2 routine takes us back to the main routine.

58
CHAPTER – 7
Numeric Data Processor- 8087
1. 8087 NDP (numerical data processor) is also known as math co-processor which is
used in parallel with the main processor for number crunching applications, which
would otherwise require complex programming.
2. It is also faster than 8086/8088 processor in performing mathematical computation.
3. It has its own specialized instruction sets to handle mathematical programs.
4. Instruction for 8087 are written in the main program interspersed with the 8086
instructions.
5. All the 8087 instruction codes have 11011 as the most significant bits of their first
code byte.
Internal Architecture of 8087
It is divided into two sections internally Control Unit(CU) & Numeric Execution
Unit (NEU).
NEU execute all the numeric processor instructions
CU receives, read & write memory operands & executes the 8087 control
instructions
These two units works asynchronously with each other

59
CU responsible for communication b/w CPU & Memory also co-coordinating the
Internal Coprocessor execution.
CU internally maintains a parallel queue, identical to status queue of main CPU
CU automatically monitors BHE/S7 line to detect CPU type
8087 uses QS0 & QS1 pins to obtain & identify the instruction fetched by the host
CPU
Identifies coprocessor instructions using ESCAPE code bits
Once CPU recognize ESCAPE code, it triggers the execution of the numeric
processor instruction in 8087
While executing ESCAPE code identifies the coprocessor instruction that requires
memory operand & also one does not require any memory operands
If instruction requires memory operand to be fetched from memory, then the
physical address of the operand is calculated using any one of the addressing modes
allowed in 8086 & a dummy read cycle is initiated by CPU
If the CPU does not require any memory operand , it directly executed.
8087 is ready with execution results, CU gets the control of bus from 8086 &executes
a write cycle to write the results in the memory at the prespecialised address
NEU execute all instructions including arithmetic, logical 68 bit fraction 15 bit
exponent & a sign bit
When NEU begins by it , the CPU recognize that the instruction execution not yet
complete .This make 8086 wait till the busy pin of 8087.
TEST input pin of 8086 goes low.
Microcode control unit generate control signals required for execution of the
instruction
Programmable shifter responsible for shifting the operands during the execution of
instructions like FMUL & FDIV.

60
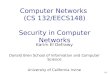
8087 PIN Diagram
How 8087 uses its registers

61
8087 Data Types
• Binary Integers
• Packed Decimal Numbers
• Real Numbers
• Short Real
• Long Real
• Temporary Real Format
Basically 8087 is used for computation of Real number which can be further
classified as
1. Short Real – 32 bit
2. Long Real – 64 bit
3. Temporary Real – 80 bit
Where S =Sign bit (0 = +ve , 1 = -ve)
Exponent bias (Normalized value)

62
Short Real = 127 (7FH)
Long Real = 1023 (3FF)
Temporary Real = 16383 (3FFFH)
General Formula for Real Number is
Real Number = Sign.2exponent
* Mantissa
Examples:
1. Convert -3F25H in Short real, long real & temporary real format
Solution:
Step 1: Convert to binary
0011 1111 0010 0101
Step 2: Normalize the number
1.1 1111 0010 0101 x 213
Step 3:
Sign = 1
Exponent = 13
Mantissa = 11111 0010 0101
Step 4: Calculate biased exponent
Short Real = 13 + 127 =140 = (10001100)2
Long Real = 13 + 1023 =1036 = (10000001100)2
Temporary Real = 13 + 16383 =16396 = (100000000001100)2
Step 5:
Short Real = 0 10001100 1111100100101…………….0000 (total 32 bits)
Long Real = 0 1000 0001100 1111100100101…………..…….0000 (total 64 bits)
Temporary Real = 0 1000 000 0000 1100 1111100100101 ..……….0000 (total 80 bits)
*****************************************

63
2. Convert (2005.525)10 to short real, long real & temporary real data format.
Solution:
Step 1: Convert to binary
(2005.525)10 = (1111 1010 101. 1000)2
Step 2: Normalize the number
1.111 1010 101 1000 x 210
Step 3:
Sign = 0
Exponent = 10
Mantissa = 111 1010 101 1000
Step 4: Calculate biased exponent
Short Real: 10 + 127 = 137 = (10001001)2
Long Real: 10 + 1023 = 1033 = (1000 0001 001)2
Temporary Real: 10 + 16383 = 16393 = (1000 000 0000 1001)2
Step 5:
Short Real = 0 10001001 11110101011000………….0000 (total 32 bits)
Long Real = 0 1000 0001 001 11110101011000………….0000 (total 64 bits)
Temporary Real = 0 1000 000 0000 1001 11110101011000………….0000 (total 80 bits)
***************************************************************
3. Convert (1231.525)10 to short real, long real & temporary real data format
Answer:
Step 1: Convert to binary
(1231.525)10 = (1001 1001 111. 1000)2
Step 2: Normalize the number
1.001 1001 111 1000 x 210
Step 3:

64
Sign = 0
Exponent = 10
Mantissa = 001 1001 111 1000
Step 4: Calculate biased exponent
Short Real: 10 + 127 = 137 = (10001001)2
Long Real: 10 + 1023 = 1033 = (1000 0001 001)2
Temporary Real: 10 + 16383 = 16393 = (1000 000 0000 1001)2
Step 5:
Short Real = 0 10001001 00110011111000………….0000 (total 32 bits)
Long Real = 0 1000 0001 001 00110011111000………….0000 (total 64 bits)
Temporary Real = 0 1000 000 0000 1001 00110011111000………….0000 (total 80 bits)
********************************************
Example 3

65
Example 4
Example 5

66
Assignment:
1. Convert (ABCD)16 to short real, long real & temporary real data format.
2. Convert (307.1875) to short real, long real & temporary real data format.
3. Convert (178.628) to short real, long real & temporary real data format.
8087 Instructions
It has 68 instruction distributed in six groups
1. Data Transfer Instruction
2. Arithmetic Instruction
3. Compare Instruction
4. Transcendental Instruction
5. Constant load Instruction
6. Coprocessor control Instruction
8087 Example Programs
All Instructions of 8087 are started with F, that means Float, like FADD, FSUB, FMUL, FDIV
e.t.c
1. Write a Program in TASM to calculate Area of Circle. (8087)
DATA SEGMENT
RADIUS DD 5.0
PIE DD 3.14
AREA DD ?
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
START: MOV AX,DATA
MOV DS,AX
FINIT
FLD RADIUS
FMUL RADIUS
FMUL PIE
FST AREA
INT 03
CODE ENDS
END START

67
2. Write a Program in TASM to calculate Hypotenuse of a triangle using Pythagoras
theorem. (8087)
DATA SEGMENT
SIDE1 DD 5.0
SIDE2 DD 12.0
HYPO DD ?
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
START: MOV AX,DATA
MOV DS,AX
FINIT
FLD SIDE1
FMUL SIDE1
FLD SIDE2
FMUL SIDE2
FADD
FSQRT
FST HYPO
INT 03
CODE ENDS
END START

68
3. Write a Program in TASM to calculate Roots of quadratic equation. (8087)
DATA SEGMENT
A DD 1.0
B DD 5.0
C DD 6.0
K DD 2.0
X DD ?
X1 DD ?
X2 DD ?
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE, DS:DATA
START: MOV AX,DATA
MOV DS,AX
FINIT
FLD A
FLD C
FMUL ST(0),ST(1)
FADD ST(0),ST(0)
FADD ST(0),ST(0)
FLD B
FMUL ST(0),ST(0)
FSUB ST(0),ST(1)
FSQRT
FST X
FLD K
FLD B
FSUBR ST(0),ST(2)
FDIV ST(0),ST(1)
FST X1
FLD B
FCHS
FSUB ST(0),ST(3)
FDIV ST(0),ST(2)
FST X2
INT 03
CODE ENDS
END START

69
4. Write a Program in TASM to calculate resonant frequency. (8087)
DATA SEGMENT
RES DD 7.0
CAP DD 7.0
C1 DD 1.0
C2 DD 2.0
FREQ DD ?
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
START: MOV AX,DATA
MOV DS,AX
FINIT
FLD RES
FMUL CAP
FLDPI
FMUL
FMUL C2
FSQRT
FDIVR C1
FST FREQ
INT 03
CODE ENDS
END START
******************************************************************************