-
Delayed feedback versus seasonal forcing: Resonance phenomena
in
an El Niño Southern Oscillation model
Andrew Keane∗, Bernd Krauskopf and Claire M.
PostlethwaiteDepartment of Mathematics, The University of
Auckland,
Private Bag 92019, Auckland 1142, New Zealand
December 2014
Abstract
Climate models can take on many different forms, from very
detailed highly computational models withhundreds of thousands of
variables, to more phenomenological models of only a few variables
that aredesigned to investigate fundamental relationships in the
climate system. Important ingredients in thesemodels are the
periodic forcing by the seasons, as well as global transport
phenomena of quantities such asair or ocean temperature and
salinity.
We consider a phenomenological model for the El Niño Southern
Oscillation system, where the delayedeffects of oceanic waves are
incorporated explicitly into the model. This gives a description by
a delaydifferential equation, which models underlying fundamental
processes of the interaction between internaldelay-induced
oscillations and the external forcing. The combination of delay and
forcing in differentialequations has also found application in
other fields, such as ecology and gene networks.
Specifically, we present exemplary stable solutions of the model
and illustrate bistability in the form ofone-parameter bifurcation
diagrams for the seasonal forcing strength parameter. So-called
maximum mapsare calculated to show regions of bistability in a
two-parameter plane for the seasonal forcing strength andoceanic
wave delay time. To explain the observed solutions and their
multistabilities, we conduct a bifur-cation analysis of the model
by means of dedicated continuation software. Knowing for which
parametervalues certain bifurcations take place allows us to
explain and expand on some features of the model foundin previous
publications concerning the existence of unstable solutions,
multistability and chaos. We un-cover surprisingly complicated
behaviour involving the interplay between seasonal forcing and
delay-induceddynamics. Resonance tongues are found to be a
prominent feature in the bifurcation diagrams and they
areresponsible for a high degree of multistability in the model. We
find bistability within certain resonancetongues as a result of a
symmetry property of the governing delay differential equation. We
investigatethe co-existence of stable tori, how they relate to each
other and bifurcate, which involves bifurcations ofinvariant
tori.
1 Introduction
El Niño is a climate phenomenon that is characterised by the
warming of oceanic waters off the western coast ofequatorial South
America. It has been well-known to humans for hundreds of years, as
the water temperatureshave a direct impact on the quality of the
fishing in those areas. Furthermore, El Niño is of relevance on a
globalscale: for example, it has been shown to trigger droughts in
Australia and South-East Asia [2, 17, 48] and italso seems to be
coupled with weather behaviour across the Indian Ocean [4] and even
the Atlantic Ocean [21].
The Southern Oscillation is an oscillation in the surface air
pressure between the eastern and western tropicalPacific. A common
measure of the strength of the oscillation is the Southern
Oscillation Index, defined as thesurface air pressure difference
between Tahiti and Darwin, Australia. In 1969, Jacob Bjerknes
proposed that ElNiño and the Southern Oscillation were part of the
same phenomenon, which could be described as a coupled
∗corresponding author: [email protected]
1
-
Delayed feedback versus seasonal forcing 2
system [10]. This gives the El Niño Southern Oscillation (ENSO)
system with an ocean component (El Niño)and an atmosphere
component (Southern Oscillation). As well as the ENSO warm phase,
referred to as ElNiño, there is also a cool phase called La
Niña.
The ENSO system has been modelled in the past in various
mathematical forms and at varying degreesof sophistication. For the
purpose of forecasting there exist intermediate dynamical models
(for example, see[13, 16]), high-dimensional coupled
ocean-land-atmosphere models (see [50]), statistical models (for
example, see[9, 20]) and hybrid models (see [32, 38]). Because of
the shear complexity of these models used for forecastingthey are
not suitable or practical for a rigorous investigation of the
underlying mechanisms and their interactions.Low-dimensional
coupled ocean-atmosphere models (for example, see [25, 29, 30, 52,
56, 60]) on the other hand,have proven beneficial for furthering
the qualitative understanding of ENSO. For an overview of
modellingENSO as a dynamical system, see [33].
In this paper, we consider a basic low-dimensional model for
ENSO in the form of a scalar delay differentialequation (DDE); it
was introduced in [60] and then simplified in [24] to a form that
focuses only on the interplaybetween the negative feedback via
ocean-atmosphere coupling and the seasonal forcing. The DDE model
takesthe form
ḣ(t) = −a tanh [κh(t− τ)] + b cos (2πt). (1)It describes the
evolution of the thermocline depth h (see Section 2 for more
detail) at the eastern boundaryof the Pacific Ocean (more
specifically, its deviation from the annual mean) as a function of
time measuredin years. The first term of Eq. (1) is a nonlinear
delayed negative feedback of a form justified in [44],
whichreflects the saturation in the ocean-atmosphere coupling at
large deviations from the mean thermocline depth.Parameters a and κ
represent the negative feedback amplification factor and the
ocean-atmosphere couplingstrength, respectively, and τ is the delay
time in years needed for the propagation of oceanic waves across
thePacific Ocean that form the negative feedback mechanism (see
Section 2 for details). The second term of Eq. (1)is periodic
seasonal forcing with a period of one year to reflect the annual
cycle of the seasons, where b is theforcing amplitude.
In [24] it was shown that these two mechanisms are both
essential for ENSO variability and sufficient forcreating rich
behaviour and mimicking important features seen in real-world
observations and more sophisticatedhigh-end models; see Section 2
for details on the role of these mechanisms in the ENSO system. For
the remainderof the paper, we set the parameters a = 1 and κ = 11,
which are the values that were used and justified inprevious
investigations [24, 64].
The authors of [24] highlight the possible complexity of the
dynamics of Eq. (1). Their numerical explorationincluded the
calculation of maximum maps, where the maxima of simulated
solutions for a single fixed initialcondition are illustrated as a
function of the two parameters b and τ . These maximum maps
revealed largedomains in the (b, τ)-plane where clear jumps
(discontinuities) in the observed maxima, max(h(t)), occur
withchanges in parameters. Since the solutions depend continuously
on the parameter values, these jumps in maximasuggest the existence
of unstable solutions that separate the stable ones in the phase
space. In their follow-uppaper [64], the authors present results
about phase locking to the seasonal forcing, which is an important
featureof the ENSO system, and they show the co-existence of
distinct solutions (i.e. bistability) obtained by
numericalintegration (simulation) from different fixed initial
conditions.
Here, we take a dynamical systems point of view and conduct a
bifurcation analysis of Eq. (1), where thetechnique of
investigation includes the use of the state-of-the-art continuation
software DDE-BIFTOOL [22, 53].We focus our investigation on the (b,
τ)-plane, in order to explain features of the model observed in
[24, 64].Due to uncertainties and ambiguities in how these
parameters relate to the observable world, we are interestedin the
model sensitivity to changes in these parameters.
Delay and periodic forcing are key features in the model. They
both influence and/or induce bifurcations(for example, see [3, 34,
46]). Feedback mechanisms that involve delays may be present in
many forms, not justin climate systems. For example, DDEs have been
used to describe the dynamics of epidemics [40], networksof neurons
[51], coupled chemical oscillators [11] and lasers [36, 41].
Delayed feedback is also successfully andwidely-used as a form of
control [47]. The specific combination of both delayed effects and
periodic forcing hasalso been the subject of investigation in
different fields, for example, in ecology [35], gene networks [62]
andlaser dynamics [5]. As such, the results presented here are of
relevance in a broader sense than simply withinthe context of
phenomenological climate modelling.
-
Delayed feedback versus seasonal forcing 3
In contrast to an ordinary differential equation (ODE), a DDE
such as Eq. (1) with a single fixed delayrequires a whole initial
history segment over the time interval [−τ, 0] as an initial
condition to define the initialvalue problem, i.e. the future
evolution of the system. This means that the DDE in its autonomous
form hasthe infinite-dimensional phase space C([−τ, 0];Rn) × R,
where Rn is the physical space of the variables of theDDE, C([−τ,
0];Rn) is the infinite-dimensional space of continuous functions
and R represents time.
For b = 0 in Eq. (1) (i.e. without periodic forcing), we are
left with a scalar DDE that has been studiedanalytically in the
past. Of specific interest here is the result that for τ above the
critical delay time τc = π/(2κ)the zero solution h ≡ 0 loses
stability in a Hopf bifurcation. For τ ≥ τc there exists a set of
stable periodicsolutions of period T = 4τ [14, 18, 45]. When a
strong ocean-atmosphere coupling is used (such as κ = 11), thefirst
term in Eq. (1) acts approximately as a delayed switching function,
resulting in solutions with time seriesof a zigzag form (for an
example, see Fig. 2(a1)).
Self-sustained oscillations exist due to the delayed feedback
alone, and the addition of periodic forcingintroduces a second
frequency. This implies the possibility of dynamics on an invariant
torus, which may belocked or unlocked depending on the frequencies
involved. If the two frequencies have an irrational ratio,
anytrajectory will not close and the solution is quasi-periodic. If
the frequencies have a rational ratio, then thereis a pair of
periodic orbits (one stable and one unstable) on the torus with a
finite period; one speaks of lockeddynamics. The regions in the
parameter space where the dynamics on the torus are locked are
known asresonance tongues, which are a well-studied phenomenon (for
example, see [26, 39, 42, 54]); they are discussedin the context of
Eq. (1) in Sections 4–5.
The periodic forcing depends explicitly on time t, so Eq. (1) is
a non-autonomous DDE. An autonomousdescription can be given by
increasing the dimension of the system by one by letting t ≡ z ∈ S1
and dz/dt = 1.Hence, there are no equilibrium solutions. Because
the continuation software DDE-BIFTOOL is not designedto allow for
non-autonomous DDEs, we introduce two additional dependent
variables to mimic the periodicforcing by including the Hopf normal
form:
ẏ1(t) = λy1(t)− ωy2(t)− y1(t)(y21(t) + y22(t)) (2)ẏ2(t) =
ωy1(t) + λy2(t)− y2(t)(y21(t) + y22(t)), (3)
where λ and ω are constant parameters. For our purposes, we
choose λ = 1 and ω = 2π, for which the unitcircle is a stable
periodic orbit in the (y1, y2)-plane with a period of one.
Therefore, rewriting Eq. (1) as
ḣ(t) = −a tanh [κh(t− τ)] + by1(t) (4)
provides us with the required seasonal forcing in an autonomous
form that embeds S1 into R2, which we canimplement in
DDE-BIFTOOL.
Once a periodic solution to Eq. (1) is found for certain
parameters, we can use DDE-BIFTOOL to con-tinue (or track) it
numerically while varying parameters. DDE-BIFTOOL can also
determine the stability ofperiodic solutions by calculating their
Floquet multipliers, which in turn can be used to identify
bifurcations.The bifurcation theory of DDEs with a single fixed
delay is analogous to the theory of ODEs (relevant bifur-cation
theory for ODEs can be found in, for example, [39, 55]). Since
there are no equilibrium solutions ofEq. (1), in later sections the
bifurcation types of interest will be those of periodic orbits: we
find saddle-nodebifurcations of periodic orbits, period-doubling
bifurcations and torus (or Neimark-Sacker) bifurcations. Allof
these bifurcations can be continued numerically in two-dimensional
parameter space with the latest versionof DDE-BIFTOOL by fixing
constraints on the Floquet multipliers. For details about the
numerical methodsimplemented in DDE-BIFTOOL, see [22, 43, 49].
We begin this work by presenting some examples of stable
periodic solutions that show evidence of multi-stability in model
(1). We then illustrate bistability clearly in the form of
one-parameter bifurcation diagrams,obtained by tracking solutions
for both increasing and decreasing parameter b, while using the
previous so-lution as an initial condition history. This allows us
to calculate maximum maps in the (b, τ)-plane for bothincreasing
and decreasing b to map out regions of bistability. The maximum
maps presented in [24] used asingle fixed initial condition and, as
such, did not show the parameter regions where bistability is
present. Themaximum maps that we show here reveal (as noted in
[24]) sharp interfaces that represent rapid transitions (orjumps)
in the observed maxima for varying parameters. We then overlay the
maximum maps with bifurcation
-
Delayed feedback versus seasonal forcing 4
curves calculated with DDE-BIFTOOL. Overall, our analysis and
general theory [39] describe a parameterplane divided by curves of
torus bifurcations, which are bridged by an infinite number of
resonance tongues andsmooth curves of quasi-periodic solutions. The
bifurcation curves agree well with the sharp interfaces seen in
themaximum maps and allow for a detailed interpretation of
numerical simulations. We compare our bifurcationcurves with
simulation results from [64] to show that the dynamics for a
parameter set that was believed to bechaotic actually consists of
quasi-periodic (or high-period) solutions. The bifurcation analysis
reveals resonancetongues as a prominent feature in the parameter
plane. We discuss and demonstrate the role they play
formultistability; in particular, we identify a symmetry property
in Eq. (1) to be a source of bistability withinp :q resonance
tongues of even p or q. Some of the sharp interfaces in the maximum
maps cannot be explainedby the bifurcation curves calculated with
DDE-BIFTOOL, which leads us to a discussion about the
changingcriticality along a curve of torus bifurcations and then a
detailed study of bifurcations of invariant tori in thesystem. We
provide evidence for the presence of fold bifurcations of tori and
associated resonance tongues. Thisincludes bifurcations of
quasi-periodic solutions that differ from bifurcations of periodic
orbits, since the twoinvariant tori involved mutually destroy each
other before they reach the bifurcation point. We show how twosuch
bifurcations can be connected by a branch of solutions on an
invariant torus of saddle-type by locatingresonant solutions along
the branch.
The paper is organised as follows. In Section 2 we explain in
more detail the physical processes of ENSO thatlead to the model.
Section 3 contains results obtained by numerical integration,
including time series of sampleperiodic solutions, one-parameter
bifurcation diagrams and maximum maps of Eq. (1). The overall
bifurcationset in the (b, τ)-plane is presented in Section 4. In
Section 4.1 we focus on the role of resonance tongues for
themultistability of the system. Further results concerning
bistability within resonance tongues are presented inSection 4.2.
Section 4.3 addresses the changing criticality of the torus
bifurcation and how it affects numericalobservations. The
properties of tori and their bifurcations are discussed in Section
5. Finally, in Section 6 wedraw some conclusions and point to
future work.
2 Background on the ENSO
We now give some further details of properties of ENSO and a
brief description of where the terms of the modelEq. (1) have their
origin. For further details on the associated climate processes we
refer to [19].
The thermocline is a relatively thin oceanic layer between the
deep cold waters and the warmer well-mixedlayer above. The depth of
this layer is different in different regions of the ocean; in the
eastern Pacific Oceanit has an average depth of about 50m. The
variable h(t) of Eq. (1) represents the deviation from the
meanthermocline depth at the eastern boundary. The quantity h is
measured downwards from the surface, so anincrease in h means an
increase in the depth of the thermocline away from the ocean
surface. The thermoclinedepth is often used as a proxy for the
regional sea-surface temperature (SST), since a deeper thermocline
meansless upwelling (i.e. vertical transport of colder waters
towards the surface) and, hence, a higher SST. However,the exact
relationship itself between the two is non-trivial and includes
delays [27].
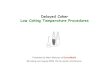
Figure 1 illustrates the interactions via the ocean-atmosphere
coupling that influence the thermocline depthat the eastern
Pacific. In equilibrium, the thermocline is typically deeper in the
west of the Pacific Ocean andshallower in the east. An atmospheric
convection loop exists above the equatorial ocean as a result of
thisdifference, where hot air rises in the west and cold air sinks
in the east, giving rise to the easterly trade winds(easterly
meaning blowing from east to west). As shown by the arrows in the
atmosphere component of Fig. 1,a positive perturbation in h slows
down these winds, creating westerly wind anomalies (i.e. deviations
fromthe mean) over the equatorial Pacific Ocean. These anomalies
together with the effect of the so-called Ekmantransport
phenomenon1 cause surface water in the central part of the Pacific
basin (where the ocean-atmospherecoupling is strongest) to move
towards the equator, shown by the arrows of the ocean component in
Fig. 1.This, in turn, induces two sets of equatorial waves, which
are waves trapped near the equator by the Coriolis
1Because of the Coriolis force the surface flow generated by the
wind is at 45◦ to the wind direction (to the left/right in
thesouthern/northern hemisphere). However, dividing the body of
water into thin layers, this angle shifts further for each deeper
layersince the drag force is not from the wind itself but the layer
above. The spiral form of flow shifting in direction and
graduallybecoming weaker for deeper layers is known as the Ekman
spiral. Integrating over the Ekman spiral gives a net water
transportation90◦ to the left/right of the surface wind in the
southern/northern hemisphere — this is known as Ekman
transport.
-
Delayed feedback versus seasonal forcing 5
h
+
Atmosphere
Rossby wave
Kelvin wave
Equator
Figure 1: The variable h represents deviations from the mean
thermocline depth at the eastern boundary of theequatorial Pacific
Ocean. The coupling between ocean and atmosphere allows for the
creation of negative andpositive feedback mechanisms as indicated
by the arrows (see text for details).
force. The deficit of warmer surface water in the off-equatorial
central Pacific Ocean decreases the depth ofthe thermocline, which
decreases the SST due to more upwelling. This negative signal
propagates westwardand towards the equator as a so-called Rossby
wave; see Fig. 1. At the western boundary of the Pacific Oceanthe
Rossby wave is reflected and travels back eastward as a negative
Kelvin wave (it is again the Coriolis forcethat allows Kelvin waves
to only travel in an eastward direction). After a certain time
delay, represented bythe parameter τ in Eq. (1) and assumed to be
constant, the negative signal finally arrives back at the
easternboundary of the Pacific Ocean, where it leads to a decrease
of h. This process provides the negative feedbackmechanism. The
time needed for the disturbance in the thermocline to propagate
westward as a Rossby andeastward as a Kelvin wave back to the
eastern boundary of the ocean is about 6 months.
Besides feedback mechanisms caused by delayed oceanic waves, the
literature [15, 23, 31, 58] indicates thatthe seasonal forcing and
subsequent resonances play an important role in describing the
dynamics of ENSO. Infact, the very name ‘El Niño’, referring to
the timing of the warming events around Christmas, suggests
thatresonance effects with the seasons are present. Indeed, the
negative delayed feedback and the seasonal forcingare the only two
mechanisms incorporated into the DDE model (1).
There also exists a positive feedback mechanism, which was
included in the model in [60] and is also shownin Fig. 1 for
completeness. Just as the above mentioned wind anomalies cause a
deficit in the off-equatorialwaters, there is a surplus of warm
surface water at the equator, which increases the depth of the
thermocline.This positive perturbation of the thermocline travels
eastward in the form of an equatorial Kelvin waves. Aftera time
delay of about a month the Kelvin wave arrives back at the eastern
boundary to provide a positivefeedback mechanism that increases h
further.
An ENSO model that includes the positive feedback mechanism, as
well as multiplicative parametric forcing,rather than additive
forcing, was recently investigated in [37], where the authors
demonstrated some of theabilities of DDE-BIFTOOL. As mentioned
above, this positive feedback mechanism is not included in Eq.
(1),but will be revisited in future work.
3 Stable solutions and maximum maps
Numerical integration of Eq. (1) offers some initial insight
into the behaviour of the system. A time series is themost
intuitive way of representing solutions in the context of the
observable ENSO system: maxima representwarming El Niño events and
minima cooling La Niña events. The strength of the event is
indicated by themagnitude of the maximum or minimum. Concerning the
dynamics in a more abstract sense, phase spaceprojections can give
us an idea of the shape of the attractor and are useful for
identifying attractor types, as we
-
Delayed feedback versus seasonal forcing 6
0 5 10
−1
0
1
−1 0 1
(a1) (a2)
h(t)
0 5 10
−1
0
1
−1 0 1
(b1) (b2)
h(t)
0 5 10−2
0
2
−2 0 2
(c1) (c2)
h(t)
0 5 10
−0.5
0
0.5
−0.5 0 0.5
(d1)(d2)
h(t)
0 5 10
−1
0
1
−1 0 1
(e1) (e2)
h(t)
t h(t− τ)
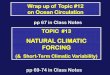
Figure 2: Stable solutions of Eq. (1), shown as time series in
panels (a1)–(e1) and as projections onto the(h(t− τ), h(t))-plane
in panels (a2)–(e2); throughout a = 1, κ = 11 and τ = 1.2, b = 0
for (a), τ = 1.2, b = 3 for(b) and (c), and τ = 0.62, b = 3 for (d)
and (e).
will see in the examples that follow. We follow the common
choice of projection onto the (h(t− τ), h(t))-planeor the (h(t− τ),
h(t− τ/2), h(t))-space.
3.1 Time series and phase space diagrams
Figure 2 shows five examples of stable solutions. They are
obtained by numerical integration of Eq. (1) withthe Euler method.
Fixed initial conditions of either h ≡ 0 (for rows (a), (b) and
(d)) or h ≡ 1 (for rows (c) and(e)) are used. All solutions,
including those in later sections, are excluding transients, i.e.
the solutions shownare the trajectories after they have had time
(up to hundreds of years, although mostly 30-40 years is
adequate)to approach and reach a stable attractor. Panels (a1)–(e1)
are examples of solutions shown as time series; theyare represented
in two-dimensional projections of the phase space in panels
(a2)–(e2).
-
Delayed feedback versus seasonal forcing 7
Row (a) displays the solution for b = 0 and τ = 1.2. As seen in
panel (a1), the solution is periodic with analmost zigzag form and
a period T = 4τ = 4.8 years. The phase space projection onto the
(h(t− τ), h(t))-planein panel (a2) shows the solution as a closed
loop. An interpretation of this solution in row (a) in the context
ofthe El Niño phenomenon yields a case where there is no seasonal
forcing and the oceanic waves that producethe negative feedback
mechanism take 1.2 years to reach the eastern boundary of the
Pacific (cf. Section 2).The El Niño event then occurs every 4.8
years.
By contrast, row (b) displays a solution for τ = 1.2, but for b
= 3, where we see a periodic solution of periodT = 1 with what
appears to be a sinusoidal form. A closed loop is seen in panel
(b2). In this case, wherethe dynamics is influenced by both the
internal feedback mechanism and the seasonal forcing, the solution
isdominated by the seasonal forcing, which is why it has a period
of one.
Row (c) is for the same parameter values as row (b), but with a
different initial history. Panel (c1) revealsa different solution
from that of panel (b1): a periodic solution of period T = 5. This
solution has a more com-plicated trajectory in the phase space
projection in panel (c2) compared to the previous example in panel
(b2).Note that the self-intersections seen in panels (c2)–(e2) are
a result of the projection of the trajectory ontotwo dimensions. An
interpretation of the example shown in row (c) would indicate
multiple El Niño eventsof varying strength, with the largest
occurring every 5 years. This time series is a case where two
frequencies(from the delayed feedback and the seasonal forcing)
have a clear influence.
Row (d) for b = 3 and τ = 0.62 gives an example where the stable
solution is quasi-periodic (or of a very highperiod). The
quasi-periodic behaviour can be seen particularly well in the phase
space projection in panel (d2),where the trajectory over 50 years
traces out a torus. When interpreting the parameters compared to
the lastexample, the strength of the seasonal forcing is the same,
but the oceanic waves now travel across the Pacificin just above
half the time.
The final example in row (e) is calculated for the same
parameters as row (d), but with a different initialhistory, which
results in a periodic solution of period T = 3. As in the last two
examples, both time series andphase space projection shows the
influence of two frequencies on the dynamics.
Comparing rows (d) and (e), we find a case of bistability
between a quasi-periodic and a periodic solutionfor the same values
of the parameters. Hence, the solution that the system converges
towards depends on theinitial history. Similarly, bistability is
seen when comparing rows (b) and (c). This clearly shows that there
areregions in the (b, τ)-plane where bistability (possibly
multistability) exists.
3.2 One-parameter bifurcation diagrams
To further investigate the bistabilities observed in Figs.
2(b)–(c) and Figs. 2(d)–(e), we calculate one-parameterbifurcation
diagrams. Figure 3 shows the overall maxima of solutions for a
range of b values for τ = 1.2 inpanel (a) and for τ = 0.62 in panel
(b). A maximum is simply taken as the largest value from the time
series;because the solutions may not necessarily be periodic, the
length of time from which the maximum is obtainedmust be
sufficiently long (it was typically about 100 years). The diagrams
in Fig. 3 show maxima of solutionscalculated while sweeping both up
and down in the parameter b. This is done by setting the initial
history usedto calculate a solution as the previous solution (i.e.
that of a slightly lower or higher value of b, depending onthe
direction that b is being changed). The black arrows indicate the
direction in which b is changed and wherethere are jumps (or rapid
transitions) in the maxima obtained.
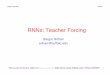
In both Figs. 3(a) and (b) there exist an upper and a lower
branch of maxima when increasing and decreasingb, respectively. In
both cases we see an overlapping range of b values for which stable
solutions from bothbranches exist, yielding the hysteresis loops
indicated by the black vertical arrows in Fig. 3.
In Figs. 3(a) and (b) the upper branches originate from
solutions dominated by the internal feedback mech-anism for low
values of b. On the lower branches one sees maxima of solutions
that are initially dominated bythe seasonal forcing for large
values of b. Where these branches overlap there is bistability
between them. Notethat the solution seen for (b, τ) = (3, 1.2) in
Fig. 2(b) with period T = 1 lies on the lower branch of Fig.
3(a),while the solution seen in Fig. 2(c) with period T = 5 lies on
the upper branch. Similarly, the quasi-periodicand periodic of T =
3 solutions seen in Figs. 2(d) and (e) are found on the lower and
upper branch of Fig. 3(b),respectively.
A number of small kinks are visible in the graph of max(h(t)) in
Fig. 3. They correspond to parameter
-
Delayed feedback versus seasonal forcing 8
0 2 4 60.5
1
1.5
2
(a)
max(h(t))
b
6
?��
��
�����
0 1 2 3
0.4
0.6
0.8
1
(b)
b
6
?
��
� ���
Figure 3: One-parameter bifurcation diagrams showing maximum
values of h(t) for a = 1, κ = 11 and τ = 1.2(a) and τ = 0.62 (b).
Each plot shows two sets of global maxima: one for increasing b and
the other fordecreasing b. The black arrows indicate the direction
of changing b, as well as rapid transitions in the maximumvalue of
h(t).
values where the solution enters, exits or briefly passes
through a resonance tongue containing only lockedsolutions. Namely,
in contrast to a quasi-periodic solution, a locked periodic
solution does not cover the entiretorus and, therefore, will not
necessarily attain the overall maximum on the torus. For example,
small kinksseen in Fig. 3(b) represent the solution as it passes
through a small resonance tongue at b ≈ 0.3, enters a
largeresonance tongue at b ≈ 1 and exits the same resonance tongue
as the solution becomes unstable at b ≈ 3. Atb ≈ 3.1 there is a
torus bifurcation, as will be detailed in Section 4.
3.3 Maximum maps
A maximum map plots the maximum of attractors as a function of
two parameters, where the maximum of eachsolution max(h(t)) is
displayed according to a colour scheme. This provides a quick
overview of some featuresof the dynamics. As mentioned in Section
1, maximum maps in the (b, τ)-plane were calculated in [24] for
asingle fixed initial history. In Figs. 4(a) and (b), we instead
show two maximum maps where, for each row offixed delay τ , the
parameter b is scanned up and down (using previous solutions as
initial histories in the samefashion as for Fig. 3), as is
indicated by the arrows.
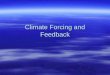
In both panels of Fig. 4 one can identify two regimes — one in
the upper-left and one in the lower-right ofthe (b, τ)-plane. They
are divided by a sharp interface that runs from the bottom-left
corner to the upper-rightcorner. There are also elongated shapes,
particularly in the upper-left corner of the plane. The sharp
interfacesthat form these structures and the dividing curve
represent where there are rapid transitions in max(h(t))
(forexample, those seen in Fig. 3). Sharp interfaces in max(h(t))
were also noted in maximum maps by the authorsof [24].
For sufficiently large values of b, the solutions represented in
Fig. 3 are dominated by the seasonal forcingand have a period of T
= 1. In Figs. 4 (a) and (b), these forcing-dominated solutions can
be found in thelower-right half of the plane.
Comparing panels (a) and (b) of Fig. 4 one notices clear
differences in the interface dividing the two mainregions, which
are the result of bistabilities, or perhaps even multistabilities.
The solution that the systemconverges to depends on the direction
in which b is varied, that is, it depends on the initial history
used. Thetwo maximum maps in Fig. 4 hence reflect the bistabilites
seen in the one-parameter bifurcation diagrams ofFig. 3. For
example, the upper and lower branches in Fig. 3(a) coincide with
the maxima at τ = 1.2 in panels(a) and (b), respectively, of Fig.
4.
-
Delayed feedback versus seasonal forcing 9
0 2 4 6 80
0.5
1
1.5
2
(a)
-
τ
b
0 2 4 6 8
0 0.5 1 1.5 2
(b)
b
�
max(h(t))
Figure 4: Maximum maps displaying the maximum value of h(t)
according to the colour scheme as b is increased(a) and decreased
(b); here a = 1 and κ = 11.
4 The bifurcation set in the (b, τ)-plane
We now investigate the dynamics causing the sharp interfaces in
max(h(t)) and the associated structures inthe maximum maps. Figure
5 shows the maximum maps from Fig. 4 in gray-scale together with
bifurcationcurves found with DDE-BIFTOOL, namely: saddle-node
bifurcations of periodic orbits (blue), period-doublingbifurcations
(black) and torus bifurcations (red). As indicated by the arrows, b
is increased in panel (a) anddecreased in panel (b).
The bifurcation curves in Fig. 5 divide the (b, τ)-plane into
regions of qualitatively different solution types,which allows us
to explain the features seen in the maximum maps. In both panels
(a) and (b) closed curves ofsaddle-node bifurcations agree well
with the elongated shapes; also compare with Fig. 4. Furthermore,
closedcurves of period-doubling bifurcations are found within some
of the closed curves of saddle-node bifurcations ofperiodic
orbits.
It is in Fig. 5(a), where b is being increased, that the curves
of saddle-node bifurcations of periodic orbitsagree to a larger
extent with some of the sharp interfaces that form the elongated
shapes. Except for smallvalues of τ , the curve T of torus
bifurcations (in red) does not agree well with the sharp interfaces
seen inpanel (a), suggesting that the solution undergoing the torus
bifurcation is not the one being followed whileincreasing b.
On the other hand, in Fig. 5(b), where b is being decreased, the
curve T agrees well with the sharp interfacein max(h(t)) that
divides the parameter plane. Regarding this large sharp interface,
we know that the smallermaxima seen for larger b values (i.e. to
the right of the large sharp interface) represent the solutions
dominatedby the seasonal forcing. This implies that, as b
decreases, these solutions undergo a torus bifurcation at thecurve
T and become unstable. This is the reason why the curve T agrees
well with the sharp interface in thecase of decreasing b seen in
Fig. 5(b). There are, however, some ranges of τ where the sharp
transitions do notoccur exactly at the curve T; the reason for this
is discussed in Section 4.3.
In both panels (a) and (b) there remain some sharp interfaces
that do not coincide with any bifurcationcurve. This is because
these sharp transitions in max(h(t)) are due to bifurcations that
cannot be readilycontinued numerically; this is discussed in
Section 5.
The elongated shapes bounded by curves of saddle-node
bifurcations of periodic orbits are in fact resonancetongues.
Numerical simulation confirms that they contain stable frequency
locked solutions, meaning that allsolutions inside each resonance
tongue have the same fixed frequency ratio. The resonance tongues
shownhere are a selection of those present in the system: there are
actually infinitely many resonance tongues. Theresonance tongues
are rooted on the line of zero forcing (where b = 0) and/or on the
curve of torus bifurcationsat points of p : q resonance. They
become very thin in the parameter plane for larger q. General
theory [39]
-
Delayed feedback versus seasonal forcing 10
0 2 4 6 80
0.5
1
1.5
2
τ
-
(a) SN
PD
T
4:3HHY1:1
1:2 3:7PPi 3:8P
Pi
1:3
1:4
1:1 1:5
1:6
1:7 1:7
0 2 4 6 80
0.5
1
1.5
2
0
0.5
1
1.5
2
τ
b
max
(h(t))
�
(b) SN
PD
T
4:3HHY1:1
1:2 3:7PPi 3:8P
Pi
1:3
1:4
1:1 1:5
1:6
1:7 1:7
Figure 5: Maximum maps of Fig. 4 overlaid with curves of
saddle-node bifurcations of periodic orbits (SN),period-doubling
(PD) and torus bifurcations (T), which are drawn in blue, black and
red, respectively. Severalfrequency ratios of resonance tongues are
indicated; here a = 1 and κ = 11.
tells us that along the torus bifurcation curve, the rotation
number of the emerging invariant tori is changingcontinuously with
the parameters (b, τ). If the rotation number is a rational number,
the bifurcating solution islocked on the torus and a resonance
tongue will branch off at this point. So for every rational
rotation number
-
Delayed feedback versus seasonal forcing 11
p/q, the resonance tongue will contain a family of p : q
resonant periodic orbits that are locked to the forcing.Such
periodic orbits form p :q torus knots as they wind around the
torus.
The zero-forcing line (b = 0) is a straight curve of torus
bifurcations for τ > π/(2κ), where delay-inducedoscillations
exist: once the seasonal forcing is switched on (i.e. b > 0), a
second frequency is introduced into thedynamics and an invariant
torus is formed. Because T = 4τ as mentioned in Section 1, we see
in the bifurcationset that p : q resonance tongues are rooted along
the zero-forcing line at τ = q/4p. Examples of these, a 4 : 3,3 :7
and a 3 :8 resonance tongue, are included in Fig. 5 branching off
at τ = 3/16, 7/12 and 8/12, respectively,from the zero-forcing
line. General theory also tells us that for an irrational value of
τ along the zero-forcingline, or for an irrational rotation number
along the curve of torus bifurcations, the location of the solution
willbe the starting point of a smooth curve of unlocked
quasi-periodic solutions that exist on a torus [39].
An example of another source of resonance is shown in Fig. 5:
the smaller resonance tongue that branches offat the point (b, τ) =
(0, 1.25) has the same shape as the resonance tongue that branches
off at (b, τ) = (0, 0.25)with each tongue containing solutions of
period T = 1. This is due to the repeating nature of periodic
solutionsof DDEs. The idea is detailed in [63], where the basic
concept is that, given a periodic solution of period Tto a certain
DDE with delay time τ , another solution with an identical time
series will exist for delay timeτ ′ = τ + T . Because the solution
is periodic, when the feedback term of the DDE calls on h(t − τ − T
) itis receiving exactly the same input as for h(t − τ).
Particularly at larger τ values this will contribute to
anincreasing number of resonance tongues.
Note that, besides periodic (locked) and quasi-periodic
(unlocked) behaviour, there may be small domainsin the parameter
space where chaos exists. However, chaotic behaviour does not seem
to be a significant featurein the model for the parameter range
investigated here.
4.1 Transition through resonance tongues
Figures 6 (a1) and (a2) are reproduced from [64] and display the
local maxima and minima in h(t) of stablesolutions found by
numerical integration of Eq. (1) for b = 2 and corresponding values
of τ with a fixed initialcondition h ≡ 1. Panel (a1) shows
alternating regions of small finite numbers of local maxima and
minima withregions of very large (possibly representing infinite)
numbers of local maxima and minima. The differences inthe numbers
of local maxima and minima indicate different solution types: a
periodic solution will have a finitenumber of local maxima and
minima, while an aperiodic solution could have an infinite number
of local maximaand minima over time.
Panel (a2) is an enlargement of (a1) showing only local maxima
for a smaller range of τ ∈ [0.50, 0.59] valuesand b = 2. Here, most
of the range of τ corresponds to solutions with a very large
(possibly infinite) number oflocal maxima with windows of small
finite numbers of local maxima. The authors of [64] suggested that
chaosis present here between windows of periodic solutions.
The different numbers of local maxima and minima seen in panels
(a1)–(a2) can be understood from thebifurcation analysis. Panel
(b1) is a transposed version of Fig. 5 (b). The green line at b = 2
indicatesthe position of the parameter section represented in Fig.
6(a1). Along the green line the solution types in thebifurcation
analysis coincides very well with the local minima and maxima shown
above in panel (a1). Beginningwith small values of τ in panel (b1),
the solution is dominated by the seasonal forcing until a torus
bifurcationat τ ≈ 0.51 (red curve). For the same values of τ in
panel (a1), there is just one set of minima and maxima,reflecting
the case of seasonal forcing domination. After the torus
bifurcation at curve T, a stable invarianttorus is born. We now see
an infinite (or very large) number of local minima and maxima in
panel (a1), sincethese solutions are quasi-periodic or of a very
high period. As τ increases in panel (b1), the solutions
alternatebetween being locked (periodic) and unlocked
(quasi-periodic) on the torus, depending on whether the givenτ
value lies within a resonance tongue or not. For values of τ for
which the solution is within a resonancetongue, there is a small
finite number of local minima and maxima. Due to the nature of the
seasonal forcing,there is one local maximum every year; for
example, the solutions with a period of three years (in the 1 :
3resonance tongue) have three local maxima. Inside some resonance
tongues are period-doubling bifurcations(see Fig. 6(b1)), which is
why the local minima and maxima sometimes split into two, for
example, for valuesclose to τ = 1 in panel (a1).
Fig. 6(b2) is an enlargement of panel (b1), where some example
resonance tongues are shown, which are
-
Delayed feedback versus seasonal forcing 12
0 0.5 1 1.5 20
2
4
6
8
b
τ
(b1)
(a1)
T
0.5 0.52 0.54 0.56 0.581.8
1.9
2
2.1
2.2
b
τ
(b2)
(a2)
4:93:7 2:5
3:8
CCCW
T
Figure 6: Panel (a1) displays the local maxima and minima of
simulated solutions for b = 2 and τ ∈ [0, 2] andpanel (a2) shows
the same maxima for τ ∈ [0.5, 0.59]; these two figures are
reproduced from Ref. [64]. Panel (b1)is a transposed version of
Fig. 5(b) with a green line indicating b = 2. Panel (b2) shows the
maximum mapwith bifurcation curves over the same τ -range as (a2)
with some resonances indicated. Here a = 1 and κ = 11.
bounded by the blue curves of saddle-node bifurcations of
periodic orbits. Again, the green line indicates theposition of the
parameter section shown in panel (a2). By comparison with panel
(b2), we see that panel (a2)shows in finer detail the formation of
the stable invariant torus from the torus bifurcation at τ ≈ 0.51,
afterwhich both locked and unlocked solutions exist. Therefore, as
seen in the context of the bifurcation investigationcarried out
above, the behaviour observed throughout the τ -range considered in
panel (a2) is not chaos butquasi-periodic behaviour. At some τ
values there are windows of smaller finite numbers of local maxima.
Theserepresent solutions that lie within thin resonance tongues,
some of which can be seen in panel (b2), includinga 4:9, 3 :7, 2 :5
and 3:8 resonance tongue. The agreement between Fig. 6(a2) and (b2)
is very good, but theremay be small discrepancies that arise
because the set of local maxima from [64] were calculated by
numericalintegration from the same fixed initial condition for each
value of τ , whereas the set of solutions represented inpanel (b2)
were calculated by scanning the parameter plane.
4.2 Bistability within resonance tongues
We observe that some resonance tongues in the maximum maps
appear to be striped with alternating horizontallines; an example
is the 2 : 5 resonance tongue in Fig. 6(b2). A clear example is
also the 1 : 2 resonance tonguein Fig. 7, which is an enlarged
version of part of Fig. 5(b) with a different colour scheme; note
that increasingb produces a qualitatively similar map. The
resonance tongue in Fig. 7 is bounded by curves of
saddle-nodebifurcations of periodic orbits; it is rooted on the
zero-forcing line at one end and on the (red) curve of
torusbifurcations at the other end. Inside the tongue there are
stripes representing solutions of both larger andsmaller
maxima.
Normally, within a resonance tongue there is one stable and one
unstable solution that approach each other
-
Delayed feedback versus seasonal forcing 13
0.5 1 1.5 20.48
0.49
0.5
0.51
0.52
0.53
0.54
0.3
0.4
0.5
0.6
0.7
τ
b
max(h(t))
TSN
Figure 7: Maximum map for decreasing b showing the 1 : 2
resonance tongue bounded by the blue curves ofsaddle-node
bifurcations (SN) of periodic orbits. Also shown is the red curve
of torus bifurcations (T); herea = 1 and κ = 11.
as parameters are varied, then coincide and disappear at the
boundary of the resonance tongue in a saddle-nodebifurcation of
periodic orbits. However, Fig. 7 suggests that there are two sets
of stable periodic solutions withinthe tongue. More specifically,
for a given τ , as b is increased or decreased, the solution
reaches one of the twosolutions depending on the initial condition
when the tongue is entered, leading to the visible horizontal
stripesas a result of sweeping in b. Note that producing this
figure by varying τ for fixed b would result in
verticalstripes.
To explain this phenomenon, Figs. 8(a)–(b) show two stable
(blue) solutions and two unstable (red) solutions,respectively, for
the same parameter set (b, τ) = (1, 0.5). These solutions are shown
as a projection onto the(h(t), h(t− τ), h(t− 12τ))-space in panel
(c). Note that viewing this projection from different angles (not
shown)reveals that trajectories do not intersect. Panel (d) shows a
one-parameter bifurcation diagram of these solutionswhen they are
continued in τ for b = 1. The gray line at τ = 0.5 intersects the
solutions shown in panels (a)–(c).Small blue-filled circles
represent saddle-node bifurcations of periodic orbits at the
boundary of the resonancetongue.
Comparing the two solutions in each panel (a)–(b), one can see
that the symmetry
h2(t) = −h1(t+1
2) (5)
gives two distinct solutions that are symmetric counterparts of
each other. In general, this symmetry is aninherent property of Eq.
(1), resulting from both the periodic nature of the forcing term
and the fact that thedelay term is an odd function. The symmetry 5
does not depend on the parameter values; however, for p : qlocked
solutions with odd p and q integers, h2 ≡ h1. In this case, there
is only one distinct solution with thesymmetry h1(t) = −h1(t+ 12 ).
This explains why only some of the resonance tongues (i.e. those
with even p orq) appear striped in the maximum maps.
The symmetry (5) appears in the phase space projection in panel
(c) as a rotational invariance of 180 degrees.The two symmetric
counterpart solutions can also be seen in the bifurcation diagram
in panel (d). Continuingthe solutions shown in panels (a)–(b) of
Fig. 8 across the resonance tongue for varying τ reveals that
either sideof the tongue is bound by, not just one, but two
symmetric saddle-node of periodic orbits bifurcations. This wasnot
visible in Fig. 5 because both sets of saddle-node bifurcation
curves that bound either side of the resonancetongue lie on top of
each other as they relate to symmetrically related periodic
solutions.
-
Delayed feedback versus seasonal forcing 14
−0.5
0
0.5
h(t)
(a)
0 1 2 3 4
−0.5
0
0.5
h(t)
t
(b)
−0.5
0
0.5
−0.5
0
0.5
−0.5
0
0.5
h(t−τ)
h(t− 12τ)
h(t)
(c)
0.49 0.5 0.51
0.2
0.4
0.6
0.8
max(h(t))
τ
(d)
Figure 8: Two stable (blue) and two unstable (red) periodic
orbits within the 1:2 resonance tongue at (b, τ) =(1, 0.5) are
shown in panels (a) and (b), respectively, as time series and in
panel (c) as a projection onto the(h(t), h(t − τ), h(t −
12τ))-space. Panel (d) is the one-parameter bifurcation diagram in
τ for b = 1, where theblue and red curves correspond to stable and
unstable solutions, respectively. Saddle-node bifurcations of
theperiodic orbits are indicated by blue-filled circles;
intersection points with the gray line at τ = 0.5 yield
thesolutions observed in panels (a)–(c). Here a = 1 and κ = 11.
4.3 Criticality of torus bifurcation
For some parameter values in Fig. 5(b) there are discrepancies
between the curve of torus bifurcations and thesharp interface seen
in the maximum map. This can be seen more clearly in Fig. 9, which
is an enlargementof part of Fig. 5. The curves of saddle-node
bifurcations of periodic orbits are not shown here; nonetheless,the
resonance tongues are easy to recognise. Figure 9(a) shows the
maximum map for increasing b, where thecurve T does not seem to
affect the solutions being followed. Instead, there are other sharp
interfaces that willbe discussed in Section 5. Figure 9(b) shows a
region where the curve T agrees only partially with the
sharpinterface. For τ . 1.5 or τ & 1.6 the curves agree, where
the maximum of the solutions change rapidly at curveT (from dark
blue to red) as b is decreased. However, for 1.5 . τ . 1.6, there
is a gradual change (to lightblue) after the torus bifurcation
curve as b is decreased, before a rapid change in maximum at b
values beyondthe torus bifurcation curve.
The reason for the discrepancies between the curve of torus
bifurcations and the sharp interface in panel (b)is that the torus
bifurcation changes criticality along the curve. For τ . 1.5 or τ
& 1.6 in panel (b), the (darkblue) solution, which is dominated
by the seasonal forcing, simply becomes unstable at the torus
bifurcationcurve as b is decreased and the next solution jumps to a
larger (red) maximum. The solution with a larger (red)maximum is
one that lies on a different, larger torus that co-exists for these
parameters, that is all parametersfor which the maximum appears red
in panel (a). This implies that the torus bifurcation at these
values of
-
Delayed feedback versus seasonal forcing 15
3 4 5 61.45
1.5
1.55
1.6
1.65
-
τ
b
(a)
T
3 4 5 6
0.6 0.8 1 1.2 1.4 1.6 1.8
�
b
max(h(t))
(b)
T
Figure 9: Maximum maps for increasing b (a) and decreasing b (b)
with a (red) curve of torus bifurcations (T);here a = 1 and κ =
11.
τ is subcritical (resulting in an unstable invariant torus of
saddle-type to the right of the torus bifurcationcurve). As b is
decreased for 1.5 . τ . 1.6, the (dark blue) solution also becomes
unstable at the curve oftorus bifurcations. However, for these τ
values, a stable torus emerges with a stable periodic or
quasi-periodicsolution. It grows in maximum (light blue) and, at
some value of b after the torus bifurcation curve, this torusloses
stability, at which point the maximum jumps to another solution
with a larger (red) maximum. Thisimplies that the torus bifurcation
for those values of τ is supercritical (resulting in a stable
invariant torus).
With the knowledge gained from the bifurcation analysis in
Section 4, the examples shown in Fig. 2 canbe understood in terms
of their position on the (b,τ)-plane relative to the bifurcation
curves. The solutions inFigs. 2(c) and (e) belong to the resonance
tongues of T = 5 and T = 3, respectively; see Fig. 5(a). The
solutionin Fig. 2(b) is dominated by the seasonal forcing and has a
b value larger than the torus bifurcation curve; seeFig. 5(b). The
solution in Fig. 2(d) is a high-period or quasi-periodic solution
for a value of b slightly belowthat of a supercritical torus
bifurcation; see Fig. 5(b).
The bifurcation curves shown in Fig. 5 explain most, but not
all, of the results obtained by numericalintegration in Sections
3–4. For example, one might ask the question: why does the stable
invariant torus seento emerge from the curve of torus bifurcations
in Fig. 9(b) disappear at certain combinations of parameters?What
causes the sharp interfaces seen in Fig. 9(a)? These questions are
discussed in the next section.
5 Bifurcations of tori
We now consider the sharp interfaces seen in the maximum maps of
Figs. 5 and 9 that still remain unexplained.For example, as b is
increased in Fig. 9(a) for each value of τ , the tori being
followed have a relatively largemaximum values (appearing red on
the maximum map). However, these tori seem to suddenly lose their
stabilityand disappear, after which the next stable solution has a
considerably smaller maximum (appearing blue on themaximum map). As
b is being decreased in Fig. 9(b) for τ values where the torus
bifurcation is supercritical,small (light blue on the maximum map)
stable tori emerge from the torus bifurcation curve. They then
soonlose their stability and disappear, after which the next stable
solution has a larger (red) maximum value.
Figure 10(a) is a one-parameter bifurcation diagram for the
parameter range b ∈ [2.9, 3.2] and τ = 0.94— which crosses a region
in the (b, τ)-plane where such unexplained sharp interfaces can be
seen in Fig. 5.For larger values of b, the solutions in Fig. 10(a)
are periodic and dominated by the seasonal forcing and areannotated
1 :1. These periodic solutions can be continued with DDE-BIFTOOL
through the torus bifurcation(T). The stable torus can be followed
by numerical integration while decreasing b in small steps, until
there is arapid transition in max((h(t)) at b ≈ 2.95. Notice the
kink at b ≈ 2.97, where the torus passes through the 3:10
-
Delayed feedback versus seasonal forcing 16
2.9 2.95 3 3.05 3.1 3.15 3.20.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
2.9695 2.97 2.97050.815
0.82
0.825
3.00753 3.00754 3.00755
0.95
0.955
0.96
(a)(b)
(c)
5 :17
7:24
6
?
���
�
-
max(h(t))
b
1:1
torus
3:10
torus2:7
T
SNT
SNTSN
8:2713:44
5:17
12:417:24
Figure 10: Panel (a) is a one-parameter bifurcation diagram in b
for τ = 0.94, where blue and red lines indicatestable and unstable
solutions, respectively. The branches of stable tori were found by
parameter sweepingwith numerical simulation, and they end at the
points denoted SNT. The black arrows indicate the directionof
change of b and a hysterisis loop. The red circles represent
unstable locked periodic solutions. Panels (b)and (c) are
one-parameter bifurcation diagrams in b for τ = 0.94 of the
periodic orbits in the 5 : 17 and 7 : 24resonance tongues,
respectively. Here a = 1 and κ = 11.
resonance tongue and its rotation number is 3/10. Enlarging the
blue curve would reveal further smaller kinksrepresenting thinner
resonance tongues. For smaller b and larger max((h(t)) values,
there is a 2 : 7 resonancetongue whose periodic orbits can be
continued with DDE-BIFTOOL; it terminates in a saddle-node
bifurcationof periodic orbits (SN). While increasing b, the
solutions after the 2 : 7 resonance tongue can be followed
bynumerical integration and we find an upper stable torus until b ≈
3.01.
Notice how the upper and lower blue curves representing
solutions on tori bend downwards and upwards,respectively, and
become vertical before their rapid transitions. This is very
reminiscent of a saddle-nodebifurcation of periodic orbits. This
comparison suggests that there is a fold or saddle-node bifurcation
of tori,denoted SNT in Fig. 10(a). We discuss the intricacies of
this phenomenon in more detail below. On the levelof Fig. 10(a),
the suggestion is that there is a branch of unstable tori between
the two points labelled SNT. Itis not possible with existing
techniques to readily find and follow unstable tori in a DDE by
continuation orsimulation. We can, however, use DDE-BIFTOOL to
locate locked periodic orbits along the unstable branch.
The small red circles in Fig. 10(a) represent periodic solutions
in narrow resonance tongues. To find theseunstable locked
solutions, we make use of the fact that resonance tongues are
ordered in the Farey sequence:the largest resonance tongue that
exists between a p :q and a r :s resonance tongue is a p+r :q+s
resonance (forexample, see [28]). Therefore, we know that between
the 2 : 7 and 3 : 10 resonance tongues seen in Fig. 10(a)the torus
must pass through a 5 : 17 resonance tongue. To find a periodic
solution in this resonance tongue,we construct an initial guess and
then use DDE-BIFTOOL to correct it. To achieve an approximation of
a5 : 17 solution, we take a 17 year section from the time series of
a nearby periodic solution, in this case the3 : 10 periodic orbit.
Based on an estimate of where the 5 : 17 solution would lie on the
plot in Fig. 10(a), wescale the time series such that max(h(t))≈
0.85 and let b ≈ 2.98. DDE-BIFTOOL is then able to correct
thisconstructed initial guess to the true 5 : 17 periodic solution.
Other unstable locked periodic orbits were foundsimilarly. Shown as
red circles in Fig. 10(a) are the associated very narrow resonance
locations of the frequency
-
Delayed feedback versus seasonal forcing 17
ratios indicated, which appear to lie on a curve between the two
points labelled SNT.Figures 10(b) and (c) show the unstable 5 : 17
and 7 : 24 periodic solutions, respectively, continued for
changing b. In each case, this gives us a slice of the resonance
tongue to which the periodic solution belongs.Note that the
respective b-ranges are very small. Also notice the double set of
saddle-node bifurcations ofperiodic orbits in panel (c), as is
expected for an even period (see Section 4.2). As indicated by
their red colour,all points in these slices of resonance tongues
are unstable solutions. We find that these solutions always haveat
least one unstable Floquet multiplier, which implies that the torus
along this part of the branch is indeed ofsaddle-type.
5.1 Resonance tongues and Chenciner bubbles
Figure 10(a) presents a convincing bifurcations diagram where
branches of stable and saddle tori exist and comevery close to each
other near the points labelled SNT. Nevertheless, it is important
to realise that the tori losesmoothness and cease to exist once
they become sufficiently close to each other near SNT [6, 12]. In
otherwords, the precise bifurcation diagram is not so simple and
involves the break-up of tori. A good approach forinvestigating the
sharp interface boundary formed by these bifurcations of tori is to
consider resonance tonguesof locked tori in the nearby (b,
τ)-plane.
We begin by continuing all the resonances identified in Fig. 10
in the (b, τ)-plane. Figure 11 shows maximummaps with b increasing
in panel (a) and decreasing in panel (b), upon which we overlay
curves of saddle-nodebifurcations of periodic orbits (SN) that form
the boundaries of these resonance tongues; they are labelledp : q
at the points where they bifurcate from the curve T. Near the curve
T, where the resonance tonguesbecome extremely narrow, the
continuation of the saddle-node bifurcations of periodic orbits
eventually becomesimpractical. To represent the extremely narrow
segments of the tongues rooted on the curve T, we thereforecompute
and plot a curve of a single periodic orbit in each p : q resonance
tongue. Most resonance tonguesappear as single curves because they
are very thin. Although this is not visible, except for the 5 : 17
tongue,one boundary is drawn in a lighter blue. The points where
the resonance tongues intersect the line shown atτ = 0.94 coincide
with the red circles and the 3:10 kink seen in Fig. 10(a).
By calculating the Floquet multipliers of the p :q periodic
solutions with DDE-BIFTOOL, we establish that,as they bifurcate
from curve T in Fig. 11, the invariant tori are stable, meaning
that all of the resonance tonguescontain a set of stable and
unstable solutions. Yet, it was shown in Fig. 10 that these
resonance tongues, exceptthe 3 : 10 tongue, contain only unstable
periodic solutions. To explain how this happens, let us consider,
forexample, the 7 : 24 resonance tongue. Following the 7 : 24
resonance tongue from the curve T, it contains a setof stable and
unstable solutions. At b ≈ 2.92 the boundary curves of this
resonance tongue have local minimain b. Since these curves are so
close together, this can be interpreted as a fold of the resonance
tongue. Thereis another fold of the 7 : 24 resonance tongue at b ≈
3.01, where it has a local maximum in b. Calculationsreveal that
in-between the two folds with respect to b all solutions lie on a
torus of saddle-type and have atleast one unstable Floquet
multiplier. This is why the 7 :24 resonance tongue contains only
unstable solutionsas it passes τ = 0.94 (cf. Fig. 10(c)). On the
other hand, past the local maximum there is again a set of
stableand unstable periodic solutions in the resonance tongue. The
other resonance tongues in Fig. 11 have the samefolding and
stability properties. At τ = 0.94 only the 3 : 10 resonance tongue
has not undergone any fold and,hence, is seen to be on the stable
branch in Fig. 10(a). Overall, the folding of resonance tongues
explains whycertain locked solutions seen in Fig. 10(a) lie on
either a stable or saddle torus at τ = 0.94.
As can be seen in Fig. 11, the folds of resonance tongues
coincide with the saddle-node bifurcations of tori,represented by
the sharp interface in max(h(t)). However, there is actually no
smooth curve of saddle-nodebifurcations of tori. Near their folds
the resonance tongues form so-called Chenciner bubbles: the
invarianttorus loses normal hyperbolicity and breaks up as it
enters the region of Chenciner bubbles in the transitionfrom a
stable torus to a torus of saddle-type. In Chenciner bubbles the
dynamics are generally very complicated[8, 61]. In Fig. 11(b) the
sharp interface in maximum values might appear as a smooth curve;
however, lookingcloser would reveal further smaller Chenciner
bubbles. In this case the resonance tongues are simply thinner,so
the Chenciner bubbles are smaller and not visible on the scale of
Fig. 11.
Since we found that the resonance tongues bifurcate from the
torus bifurcation curve T, we can identifymany more in an extended
region of the (b, τ)-plane. Figure 12 shows (dark and light blue)
curves of saddle-
-
Delayed feedback versus seasonal forcing 18
0.93
0.94
0.95
0.96
-
τ
(a)
T
SN 3:10
8:2713:445:1712:417:24
2.9 2.95 3 3.05 3.1
0.93
0.94
0.95
0.96
0.4
0.6
0.8
1
max(h(t))
�
τ
b
(b)
T
SN 3:10
8:2713:445:1712:417:24
Figure 11: Maximum maps with increasing b (a) and decreasing b
(b). The red and blue curves are torusbifurcations (T) and
saddle-node bifurcations of p : q periodic orbits (SN),
respectively. One boundary of eachresonance tongue is drawn in a
lighter blue. The green line at τ = 0.94 intersects the solutions
seen in Fig. 10.Here a = 1 and κ = 11.
node bifurcations of the p : q periodic orbits for p < q ≤ 30
that bifurcate from a segment of the curve T (for0.92 . τ . 1).
Again, the resonance tongues fold near the two sharp transitions of
the maximum maps forincreasing and decreasing b, respectively. More
specifically, the envelopes of these folds form the two
boundaries.Notice also that in Fig. 12 the two (dark and light
blue) boundary curves of the shown resonance tongues start
toseparate considerably near the second fold from T (their local
maxima in b). Indeed, the two large indentationsin the boundary of
the maximum map for increasing b are formed by light blue boundary
curves of the lowresonances 2 : 7 and 3 : 11; compare with Fig.
11(a). Not only do the light and dark blue boundary curves ofeach
tongue separate but these two sets of boundary curves converge to
different limits in Fig. 12. This leadsto parameter regions where
many resonance tongues overlap. We find that, once this overlapping
occurs, the
-
Delayed feedback versus seasonal forcing 19
0.88
0.92
0.96
1
-
τ
(a)
T
6:19�
3:10�7:24�
7:27�
2.6 2.7 2.8 2.9 3 3.1 3.2
0.88
0.92
0.96
1
0.4
0.6
0.8
1
1.2
max(h(t))
�
τ
b
(b)
T
6:19�
3:10�7:24�
7:27�
Figure 12: Maximum maps with increasing b (a) and decreasing b
(b). The red and blue curves are torusbifurcations (T) and
saddle-node bifurcations of p : q periodic orbits, respectively;
shown are all p : q resonancetongues with p < q ≤ 30 bifurcating
from a segment of the torus bifurcation curve. The upper/lower
boundaryof each resonance tongue is drawn in dark/light blue. Here
a = 1 and κ = 11.
resonance tongues contain cascades of period-doubling
bifurcations and chaotic behaviour may occur.Figure 13 shows two
simultaneously stable solutions for τ = 0.91 and b = 2.6, obtained
by numerical
integration of Eq. (1) with the Euler method. As seen in Fig.
12, this is a point in the (b, τ)-plane where manyresonance tongues
are overlapping.
Row (a) of Fig. 13 displays a periodic solution that belongs to
the 1 : 3 resonance tongue. It has a largemaximum every three years
(see panel (a1)) and corresponds to a closed loop in projection
onto the (h(t −τ), h(t))-plane in panel (a2). This periodic
solution is similar to the one shown in Fig. 2(e1)–(e2), which
alsobelongs to the 1 :3 resonance tongue. An interpretation of this
solution is that a strong El Niño event appearsevery three
years.
-
Delayed feedback versus seasonal forcing 20
0 5 10
−1
0
1
−1 0 1
(a1) (a2)
h(t)
0 10 20 30 40 50
−1
0
1
−1 0 1
(b1) (b2)
h(t)
t h(t− τ)
Figure 13: Stable solutions of Eq. (1), shown as time series in
panels (a1) and (b1) and as projections onto the(h(t− τ),
h(t))-plane in panels (a2) and (b2); here τ = 0.91, b = 2.6, a = 1
and κ = 11.
Row (b) of Fig. 13 shows a different solution of Eq. (1) for the
same parameter values. The time seriesin panel (b1) seems
irregular, with the largest maxima occurring every 3-7 years. In
projection onto the(h(t − τ), h(t))-plane, 200 years of trajectory
traces an attracting object. The solution looks as if it might
beperiodic with period T = 37 in panel (b1). Although it is not
shown in the previous figures, there exists an11:37 resonance
tongue between the 3:10 and 8:27 tongues. However, this resonance
tongue, like those nearby,has already undergone a cascade of
period-doubling bifurcations at τ = 0.91 and b = 2.6. Upon close
inspectionof panel (b1), one can see that the two local maxima at t
≈ 12 differ very slightly from the two local maximaat t ≈ 49. In
fact, this trajectory appears to be chaotic: it is actually very
sensitive to perturbations, as hasbeen checked with numerical
simulations. A chaotic solution, as in Fig. 13(b), reflects the
observed irregularityof the time intervals between successive large
El Niño events, which occurs every 3-7 years.
6 Discussion
We investigated the interaction of the negative time-delayed
feedback mechanism and seasonal forcing in asimplified ENSO model.
The bifurcation analysis of the governing DDE with the continuation
software DDE-BIFTOOL allowed us to explain certain features seen in
numerical simulations in previous works [24, 64].More specifically,
we presented maximum maps, calculated by scanning the (b, τ)-plane
up and down in theparameter b, on which we overlaid the relevant
bifurcation curves. Our bifurcation analysis revealed that whatwas
previously thought in [64] to be chaotic dynamics is actually
quasi-periodic or high-period locked behaviourresulting from a
torus bifurcation. We discussed resonance tongues and their role in
multistability, includingbistabilities within p : q resonance
tongues with even p or q. Our analysis found that the relevant
parameterplane is organised by an infinite number of resonance
tongues rooted on curves of torus bifurcations. We alsofocussed on
sharp interfaces in the maximum maps that could not be explained by
continuing bifurcations ofperiodic orbits. We presented evidence
that they are due to the phenomenon of Chenciner bubbles
associatedwith the folding of resonance tongues. Following the
boundary curves of these resonance tongues also revealedparameter
regions where they overlap and more complicated behaviour
ensues.
The study we presented may be of interest more generally,
because it showcases how state-of-the-art contin-uation methods (in
particular, those for periodic solutions) can be utilised for the
bifurcation analysis of a DDE.Compared to an investigation solely
reliant on numerical simulations, the approach of continuing
bifurcationcurves of various types offers a more complete picture
of the dynamics in dependence of the model parameters.Given that
the scalar DDE (1) contains just two terms, the model shows
surprisingly rich behaviour. Thisobservation may be of interest for
other application areas where one finds competition between
time-delayed
-
Delayed feedback versus seasonal forcing 21
feedback and periodic forcing.The wealth of bifurcations, even
within small parameter ranges, highlights the relevance of
parameter sen-
sitivity in climate modelling. In particular, it is interesting
in the context of climate tipping. Some climatetipping events
correspond to certain bifurcations, where the response of a climate
system to a slight variationin parameter is a qualitative or
drastic change of observed behaviour [7]. Saddle-node bifurcations
have beenidentified as potential mechanisms for particular climate
tipping events (for example, see [1]). As far as we areaware, the
saddle-node bifurcation of tori (characterised by complicated
dynamics in the associated Chencinerbubbles) discussed in Section 5
has not yet been considered in the context of tipping. Following
the categori-sation of [57], it constitutes a further “dangerous”
bifurcation, where there is a sudden disappearance of anattractor
and the system jumps to some other “unknown” attracting state. The
irreversibility of this form oftipping event is illustrated by the
hysteresis loop in Fig. 10(a).
In future work it will be interesting to perform bifurcation
studies of models that incorporate additionaleffects; for example,
the positive feedback mechanism [60] mentioned in Section 2 or
seasonally dependent ocean-atmosphere coupling [59]. The work
presented here may serve as a foundation for understanding the
dynamics ofsuch ENSO models. Preliminary results (not presented
here) reveal that, once the positive feedback mechanismis included,
chaos is considerably more prominent over a large range of
parameters; this appears to agree betterwith the irregularity seen
in real-world El Niño observations.
6.1 Acknowledgements
We thank Jan Sieber for his help with DDE-BIFTOOL, especially
regarding the continuation of resonancetongues from their root
points. The research of A.K. has been funded by a University of
Auckland DoctoralScholarship.
References
[1] D. S. Abbot, M. Silber, and R. T. Pierrehumbert,
Bifurcations leading to summer Arctic sea iceloss, Journal of
Geophysical Research: Atmospheres (1984–2012), 116 (2011).
[2] S.-I. Aiba and K. Kitayama, Effects of the 1997–98 El Niño
drought on rain forests of Mount Kinabalu,Borneo, Journal of
Tropical Ecology, 18 (2002), pp. 215–230.
[3] K. Aihara, G. Matsumoto, and Y. Ikegaya, Periodic and
non-periodic responses of a periodicallyforced Hodgkin-Huxley
oscillator, Journal of theoretical biology, 109 (1984), pp.
249–269.
[4] R. J. Allan, D. Chambers, W. Drosdowsky, H. Hendon, M.
Latif, N. Nicholls, I. Smith, R. C.Stone, and Y. Tourre, Is there
an Indian Ocean dipole and is it independent of the El
Niño-SouthernOscillation?, PhD thesis, International CLIVAR
Project Office, 2001.
[5] A. Aragoneses, T. Sorrentino, S. Perrone, D. J. Gauthier, M.
C. Torrent, and C. Masoller,Experimental and numerical study of the
symbolic dynamics of a modulated external-cavity
semiconductorlaser, Optics express, 22 (2014), pp. 4705–4713.
[6] D. G. Aronson, M. A. Chory, G. R. Hall, and R. P. McGehee,
Bifurcations from an invariantcircle for two-parameter families of
maps of the plane: a computer-assisted study, Communications
inMathematical Physics, 83 (1982), pp. 303–354.
[7] P. Ashwin, S. Wieczorek, R. Vitolo, and P. Cox, Tipping
points in open systems: bifurcation,noise-induced and
rate-dependent examples in the climate system, Philosophical
Transactions of the RoyalSociety A: Mathematical, Physical and
Engineering Sciences, 370 (2012), pp. 1166–1184.
[8] C. Baesens and R. S. MacKay, Resonances for weak coupling of
the unfolding of a saddle-node periodicorbit with an oscillator,
Nonlinearity, 20 (2007), p. 1283.
-
Delayed feedback versus seasonal forcing 22
[9] A. G. Barnston and C. F. Ropelewski, Prediction of ENSO
episodes using canonical correlationanalysis, Journal of Climate, 5
(1992), pp. 1316–1345.
[10] J. Bjerknes, Atmospheric teleconnections from the
equatorial Pacific 1, Monthly Weather Review, 97(1969), pp.
163–172.
[11] K. Blaha, J. Lehnert, A. Keane, T. Dahms, P. Hövel, E.
Schöll, and J. L. Hudson, Clusteringin delay-coupled smooth and
relaxational chemical oscillators, Physical Review E, 88 (2013), p.
062915.
[12] H. W. Broer, Quasi-periodicity in dissipative and
conservative systems, Proceedings Symposium HenriPoincar, Universit
Libre de Bruxelles, Solvay Institutes, (2004), pp. 20–21.
[13] M. A. Cane, S. E. Zebiak, and S. C. Dolan, Experimental
forecasts of El Niño, Nature, 321 (1986),pp. 827–832.
[14] Y. Cao, Uniqueness of periodic solution for differential
delay equations, Journal of differential equations,128 (1996), pp.
46–57.
[15] P. Chang, L. Ji, B. Wang, and T. Li, Interactions between
the seasonal cycle and El Niño-SouthernOscillation in an
intermediate coupled ocean-atmosphere model, Journal of the
atmospheric sciences, 52(1995), pp. 2353–2372.
[16] D. Chen, M. A. Cane, A. Kaplan, S. E. Zebiak, and D. Huang,
Predictability of El Niño over thepast 148 years, Nature, 428
(2004), pp. 733–736.
[17] F. H. S. Chiew, T. C. Piechota, J. A. Dracup, and T. A.
McMahon, El Niño/Southern Oscillationand Australian rainfall,
streamflow and drought: Links and potential for forecasting,
Journal of Hydrology,204 (1998), pp. 138–149.
[18] S.-N. Chow and H.-O. Walther, Characteristic multipliers
and stability of symmetric periodic solutionsof ẋ(t) = g(x(t− 1)),
Transactions of the American Mathematical Society, 307 (1988), pp.
127–142.
[19] A. J. Clarke, An introduction to the dynamics of El Niño
& the Southern Oscillation, Academic press,2008.
[20] A. J. Clarke and S. Van Gorder, Improving El Niño
prediction using a space-time integration ofIndo-Pacific winds and
equatorial Pacific upper ocean heat content, Geophysical research
letters, 30 (2003),p. 1399.
[21] D. B. Enfield and D. A. Mayer, Tropical Atlantic sea
surface temperature variability and its relation toEl
Niño-Southern Oscillation, Journal of Geophysical Research: Oceans
(1978–2012), 102 (1997), pp. 929–945.
[22] K. Engelborghs, T. Luzyanina, and G. Samaey, DDE-BIFTOOL: a
Matlab package for bifurcationanalysis of delay differential
equations, TW Report, 305 (2000).
[23] M. Ghil and A. W. Robertson, Solving problems with GCMs:
General circulation models and theirrole in the climate modeling
hierarchy, International Geophysics, 70 (2001), pp. 285–325.
[24] M. Ghil, I. Zaliapin, and S. Thompson, A delay differential
model of ENSO variability: parametricinstability and the
distribution of extremes, Nonlinear Processes in Geophysics, 15
(2008), pp. 417–433.
[25] A. E. Gill, Some simple solutions for heat-induced tropical
circulation, Quarterly Journal of the RoyalMeteorological Society,
106 (1980), pp. 447–462.
[26] L. Glass and J. Sun, Periodic forcing of a limit-cycle
oscillator: Fixed points, Arnold tongues, and theglobal
organization of bifurcations, Physical Review E, 50 (1994), p.
5077.
-
Delayed feedback versus seasonal forcing 23
[27] J.A. Hein Zelle, G. Appeldoorn, G. Burgers, and G. J. van
Oldenborgh, The relationshipbetween sea surface temperature and
thermocline depth in the eastern equatorial Pacific, Journal of
physicaloceanography, 34 (2004).
[28] M. Inoue and H. Kamifukumoto, Scenarios leading to chaos in
a forced Lotka-Volterra model, Progressof Theoretical Physics, 71
(1984), pp. 930–937.
[29] F.-F. Jin, An equatorial ocean recharge paradigm for ENSO.
Part i: Conceptual model, Journal of theAtmospheric Sciences, 54
(1997), pp. 811–829.
[30] , An equatorial ocean recharge paradigm for ENSO. Part ii:
A stripped-down coupled model, Journalof the Atmospheric Sciences,
54 (1997), pp. 830–847.
[31] F.-F. Jin, J. D. Neelin, and M. Ghil, El Niño on the
devils staircase: Annual subharmonic steps tochaos, Science, 264
(1994), pp. 70–72.
[32] I.-S. Kang and J.-S. Kug, An El-Niño Prediction System
using an intermediate ocean and a statisticalatmosphere,
Geophysical research letters, 27 (2000), pp. 1167–1170.
[33] H. Kaper and H. Engler, Mathematics and climate, Society
for Industrial and Applied Mathematics(SIAM), Philadelphia,
Pennsylvania, 2013.
[34] K. Kiyono and N. Fuchikami, Bifurcations induced by
periodic forcing and taming chaos in drippingfaucets, Journal of
the Physical Society of Japan, 71 (2002), pp. 49–55.
[35] H. Knolle, Lotka-Volterra equations with time delay and
periodic forcing term, Mathematical Biosciences,31 (1976), pp.
351–375.
[36] B. Krauskopf, Bifurcation analysis of lasers with delay,
Unlocking dynamical diversity: Optical feedbackeffects on
semiconductor lasers, (2005), pp. 147–183.
[37] B. Krauskopf and J. Sieber, Bifurcation analysis of
delay-induced resonances of the El-Niño SouthernOscillation,
Philosophical Transactions of the Royal Society A: Mathematical,
Physical and EngineeringSciences, 470 (2014).
[38] J.-S. Kug, I.-S. Kang, and S. E. Zebiak, The impacts of the
model assimilated wind stress data in theinitialization of an
intermediate ocean and the ENSO predictability, Geophysical
research letters, 28 (2001),pp. 3713–3716.
[39] Y. A. Kuznetsov, Elements of applied bifurcation theory,
1995, Spring-Verlag, New York.
[40] Y. N. Kyrychko and K. B. Blyuss, Global properties of a
delayed SIR model with temporary immunityand nonlinear incidence
rate, Nonlinear analysis: real world applications, 6 (2005), pp.
495–507.
[41] D. Lenstra and M. Yousefi, Theory of delayed optical
feedback in lasers, AIP Conference Proceedings,548 (2000), pp.
87–111.
[42] R. P. McGehee and B. B. Peckham, Resonance surfaces for
forced oscillators, Experimental Mathe-matics, 3 (1994), pp.
221–244.
[43] H. Meijer, F. Dercole, and B. Oldeman, Numerical
bifurcation analysis, in Encyclopedia of Com-plexity and Systems
Science, Springer, 2009, pp. 6329–6352.
[44] M. Münnich, M. A. Cane, and S. E. Zebiak, A study of
self-excited oscillations of the tropical ocean-atmosphere system.
Part ii: Nonlinear cases, Journal of the atmospheric sciences, 48
(1991), pp. 1238–1248.
[45] R. D. Nussbaum, Uniqueness and nonuniqueness for periodic
solutions of x′(t) = −g(x(t − 1)), Journalof Differential
Equations, 34 (1979), pp. 25–54.
-
Delayed feedback versus seasonal forcing 24
[46] C. M. Postlethwaite and M. Silber, Stabilizing unstable
periodic orbits in the Lorenz equations usingtime-delayed feedback
control, Physical Review E, 76 (2007), p. 056214.
[47] K. Pyragas, Continuous control of chaos by self-controlling
feedback, Physics Letters A, 170 (1992),pp. 421–428.
[48] W. H. Quinn and V. T. Neal, DO Zorf, KS Short, and RTW Kao
Yang, 1978: Historical trends andstatistics of the Southern
Oscillation, El Niño, and Indonesian droughts, Fish. Bull, 76, pp.
663–678.
[49] D. Roose and R. Szalai, Continuation and bifurcation
analysis of delay differential equations, in Nu-merical
continuation methods for dynamical systems, Springer, 2007, pp.
359–399.
[50] S. Saha, S. Nadiga, C. Thiaw, J. Wang, W. Wang, Q. Zhang,
H. M. Van den Dool, H.-L. Pan,S. Moorthi, D. Behringer, et al., The
NCEP climate forecast system, Journal of Climate, 19 (2006),pp.
3483–3517.
[51] E. Schöll, G. Hiller, P. Hövel, and M. A. Dahlem,
Time-delayed feedback in neurosystems, Philo-sophical Transactions
of the Royal Society A: Mathematical, Physical and Engineering
Sciences, 367 (2009),pp. 1079–1096.
[52] P. S. Schopf and M. J. Suarez, Vacillations in a coupled
ocean-atmosphere model, Journal of theatmospheric sciences, 45
(1988), pp. 549–566.
[53] J. Sieber, K. Engelborghs, T. Luzyanina, G. Samaey, and D.
Roose, DDE-BIFTOOL Manual— Bifurcation analysis of delay
differential equations, arXiv preprint arXiv:1406.7144, (2014).
[54] J. Simonet, M. Warden, and E. Brun, Locking and Arnold
tongues in an infinite-dimensional system:The nuclear magnetic
resonance laser with delayed feedback, Physical Review E, 50
(1994), p. 3383.
[55] Steven H Strogatz, Nonlinear dynamics and chaos: with
applications to physics, biology and chemistry,Perseus publishing,
2001.
[56] M. J. Suarez and P. S. Schopf, A delayed action oscillator
for ENSO, Journal of the atmosphericSciences, 45 (1988), pp.
3283–3287.
[57] J. M. T. Thompson and J. Sieber, Predicting climate tipping
as a noisy bifurcation: a review, Interna-tional Journal of
Bifurcation and Chaos, 21 (2011), pp. 399–423.
[58] E. Tziperman, M. A. Cane, and S. E. Zebiak, Irregularity
and locking to the seasonal cycle in anENSO prediction model as
explained by the quasi-periodicity route to chaos, Journal of the
atmosphericsciences, 52 (1995), pp. 293–306.
[59] E. Tziperman, M. A. Cane, S. E. Zebiak, Y. Xue, and B.
Blumenthal, Locking of El Niño’s peaktime to the end of the
calendar year in the delayed oscillator picture of ENSO, Journal of
climate, 11 (1998).
[60] E. Tziperman, L. Stone, M. A. Cane, and H. Jarosh, El Niño
chaos: Overlapping of resonances be-tween the seasonal cycle and
the Pacific ocean-atmosphere oscillator, Science-AAAS-Weekly Paper
Edition-including Guide to Scientific Information, 264 (1994), pp.
72–73.
[61] R. Vitolo, H. Broer, and C. Simó, Quasi-periodic
bifurcations of invariant circles in low-dimensionaldissipative
dynamical systems, Regular and Chaotic Dynamics, 16 (2011), pp.
154–184.
[62] Y. Wang, Z. Ma, J. Shen, Z. Liu, and L. Chen, Periodic
oscillation in delayed gene networks withSUM regulatory logic and
small perturbations, Mathematical biosciences, 220 (2009), pp.
34–44.
[63] S. Yanchuk and P. Perlikowski, Delay and periodicity,
Physical Review E, 79 (2009), p. 046221.
[64] I. Zaliapin and M. Ghil, A delay differential model of ENSO
variability – part 2: Phase locking, multiplesolutions and dynamics
of extrema, Nonlinear Processes in Geophysics, 17 (2010), pp.
123–135.