Embed Size (px)
DESCRIPTION
A property of MVG_OMALLOORBy Matthew Valenti
Citation preview

EE 561Communication Theory
Spring 2003
Instructor: Matthew Valenti
Date: Jan.15, 2003
Lecture #2
Probability and Random Variables

Review/Preview
Last time: Course policies (syllabus). Block diagram of communication system.
This time: Review of probability and random variables.

Random Events
When we conduct a random experiment, we can use set notation to describe possible outcomes.
Example: Roll a six-sided die. Possible outcomes: S={1,2,3,4,5,6} An event is any subset of possible outcomes: A = {1,2} The complement of the event is: A = S-A = {3,4,5,6} S is the certain event (the set of all outcomes). is the null event (empty set).
Another example: Transmit a data bit. Two complementary outcomes are:
• {Received correctly, received in error}
A

More Set Theory
The union (or sum) of two events contains all sample points in either event. Let A = {1,2}, B = {5,6}, and C={1,3,5} Then find A B and A C
The intersection of two events contains only those points that are common to both sets. Find AB and AC If AB = , then A and B are mutually exclusive.

Probability
The probability P(A) is a number which measures the likelihood of event A.
Axioms of probability: P(A)0. P(A)1 and P(A)=1 only if A=S (the certain event). If A and B are two events such that AB=,
then P(AB) = P(A)+P(B).• A and B are mutually exclusive.
S
A B i.e. A and Bdon’t overlap

Joint and Conditional Probability
Joint probability is the probability that both A and B occur: P(A,B) = P(AB).
Conditional probability is the probability that A will occur given that B has occurred:
Bayes’ theorem: P(A,B) = P(A)P(B|A) = P(B)P(A|B)
P(A|B) =P(A,B)P(B)
P(B|A) =P(A|B)P(B)
P(A) and P(A|B) =P(B|A)P(A)
P(B)
and P(B|A) =P(A,B)P(A)

Statistical Independence
Events A and B are statistically independent if P(A,B) = P(A)P(B). If A and B are independent, then:
• P(A|B) = P(A) and P(B|A) = P(B). Example:
• Flip a coin, call result A={heads, tails}.• Flip it again, call result B = {heads,tails}.• P{A=heads, B=tails} = 0.25.• P{A=heads}P{B=tails} = (0.5)(0.5) = 0.25

Random Variables
A random variable X(s) is a real-valued function of the underlying event space sS. Typically, we just denote it as X.
• i.e. we suppress the dependence on s (it is assumed).
Random variables (R.V.’s) can be either discrete or continuous: A discrete R.V. can only take on a countable
number of values.• Example: The number of students in a class.
A continuous R.V. can take on a continuous range of values.
• Example: The voltage across a resistor.

Cumulative Distribution Function
Abbreviated CDF. Also called Probability Distribution Function. Definition: Fx(a) = P[ X x ] Properties:
F(x) is monotonically nondecreasing. F(-) = 0 F() = 1 P[ a < X b] = F(b) - F(a)
The CDF completely defines the random variable, but is cumbersome to work with.
Instead, we will use the pdf …

Probability Density Function
Abbreviated pdf. Definition:
Properties:p(x) 0
Interpretation: Measures how fast the CDF is increasing. Measures how likely a RV is to lie at a particular value or
within a range of values.
)()( xFdx
dxp XX
1)(
dxxpX
)()(][)( aFbFbXaPdxxp XX
b
a
X

Example
Consider a fair die: P[X=1] = P[X=2] = … = P[X=6] = 1/6.
The CDF is:
The pdf is:0 2 4 6 x
0 2 4 6 x
unit stepfunction
6
1
)(6
1)(
iX ixuxF
dirac deltafunction
6
1
)(6
1)(
iX ixxp

Expected Values
Sometimes the pdf is unknown or cumbersome to specify.
Expected values are a shorthand way of describing a random variable.
The most important examples are: Mean:
Variance:
The expectation operator works with any function Y=g(X).
dxxxpmXE X )(][
22222 )()( XXXX mXEdxxpmxmXE
dxxpxgXgEYE )()()]([][

Uniform Random Variables
The uniform random variable is the most basic type of continuous R.V.
The pdf of a uniform R.V. is constant over a finite range and zero elsewhere:
A
1
2
Am
2
Am m
A
x

Example
Consider a uniform random variable with pdf:
Compute the mean and variance.
elsewhere
xxp
0
10010/1)(

Probability Mass Function
The pdf of discrete RV’s consists of a set of weighted dirac delta functions. Delta functions can be cumbersome to work with.
Instead, we can define the probability mass function (pmf) for discrete random variables: p[x] = P[X=x]
Properties of pmf: p[x] 0
p xx
[ ]
1
p x P a X bx a
b
[ ] [ ]
For the die-rollexample:p[x] = 1/6for 1 x 6

Binary Distribution
A binary or Bernoulli random variable has the following pmf:
Used to model binary data (p=1/2). Used to model the probability of bit error. Mean:
Variance:
1
01][
xp
xpxp

Binomial Distribution
Let where {Xi, i=1,…,n} are i.i.d.
Bernoulli random variables. Then:
where:
Mean: Variance:
n
iiXY
1
knkY pp
k
nkp
)1(][
)!(!
!
knk
n
k
n
npmX
)1(2 pnpX

Example
Suppose we transmit a 31 bit sequence (code word).
We use an error correcting code capable of correcting 3 errors.
The probability that any individual bit in the code word is received in error is p=.001.
What is the probability that the code word is incorrectly decoded? i.e. Probability that more than 3 bits are in error.

Example
Parameters: n=31, p=0.001, and t=3

Pairs of Random Variables
We often need to consider a pair (X,Y) of RVs joint CDF: joint pdf: marginal pdf:
Conditional pdf:
Bayes rule:
yYxXPyYxXPyxF YX ,),(,
),(),( ,
2
, yxFyx
yxp YXYX
dyyxpxp YXX ),()( ,
dyyxpxp YXX ),()( ,
)(
),()|( ,
yp
yxpyxp
Y
YXX )(
),()|( ,
xp
yxpxyp
X
YXY
)(
)()|()|(
yp
xpxypyxp
Y
XYX )(
)()|()|(
xp
ypyxpxyp
X
YXY

Independence and Joint Moments
X and Y are independent if:
Correlation:
If E[XY] = 0 then X,Y are orthogonal
Covariance:
If XY = 0 then X,Y are uncorrelated. If X,Y are independent, then they are uncorrelated
dxdyyxxypXYE ),(][
dxdyyxpmymxmYmXE yxYxYX ),())(()])([(,
)()(),(, ypxpyxp YXYX

Random Vectors
Random vectors are an n-dimensional generalization of pairs of random variables. X = [X1,X2, …, Xn]’ Joint CDF & pdf are possible, but cumbersome. Marginalize by integrating out unwanted variables.
Mean is specified by a vector mx = [m1, m2, …, mn]’ Correlation and covariance specified by matrices:
Covariance matrix:• M=[i,j] i.e. a positive-definite matrix with (i,j)th element i,j
• where• If M diagonal, the X is uncorrelated
Linear Transformation: Y = AX• mY=AmX
• MY=AMXA’
)])([(, jjiiji mXmXE

Central Limit Theorem
Let [X1,X2, …Xn] be a vector of n independent and identically distributed (i.i.d.) random variables, and let:
Then as n, Y will have a Gaussian distribution. This is the Central Limit Theorem. This theorem holds for (almost) any distribution of Xi’s.
Importance of Central Limit Theorem: Thermal noise results from the random movement of many
electrons --- modeled very well with Gaussian distribution. Interference from many equal power (identically distributed)
interferers in a CDMA system tends towards a Gaussian distribution.
n
iiXY
1

Gaussian Random Variables
The pdf of a Gaussian random variable is:
where m is the mean and 2 is the variance.
Properties of Gaussian random variables: A Gaussian R.V. is completely described by its mean and
variance.• Gaussian vector specified by mean and covariance matrix.
The sum of Gaussian R.V.’s is also Gaussian.• Linear transformation of Gaussian vector is Gaussian.
If two Gaussian R.V.’s are uncorrelated, then they are also independent.
• Unocrrelated Gaussian vector is independent.
)2/()( 22
2
1)(
mx
X exp

The Q Function
The Q function can be used to find the probability that the value of a Gaussian R.V. lies in a certain range.
The Q function is defined by:
where X is a Gaussian R.V. with zero mean and unit variance (i.e. 2=1).
Can also be defined as:
)(1)( zFzQ x
z
dezQ
2/2
2
1)(

Using the Q Function
If X is a Gaussian R.V. with mean m and variance 2, then the CDF of X is:
Approximation for large X Most Q function tables only go up to z=4 or z=6. For z>4 a good approximation is:
amQaXPaFx ][)(
2/2
2
1)( ze
zzQ

0 0.5 1 1.5 2 2.5 3 3.5 4 4.510
-6
10-5
10-4
10-3
10-2
10-1
100
101
Q-Function and Overbound
overbound
Q function

EE 561Communication Theory
Spring 2003
Instructor: Matthew Valenti
Date: Jan.17, 2003
Lecture #3
Random Processes

Review/Preview
Last time: Review of probability and random variables.
• Random variables, CDF, pdf, expectation.• Pairs of RVs, random vectors, autocorrelation,
covariance.• Uniform, Gaussian, Bernoulli, and binomial RVs.
This time: Random processes.
Upcoming assignments: HW #1 is due in 1 week. Computer Assignment #1 will be posted soon.

Random Variablesvs. Random Processes
Random variables model unknown values. Random variables are numbers.
Random processes model unknown signals. Random processes are functions of time.
One Interpretation: A random process is just a collection of random variables. A random process evaluated at a specific
time t is a random variable. If X(t) is a random process then X(1), X(1.5),
and X(37.5) are all random variables.

Random Variables
Random variables map the outcome of a random experiment to a number.
heads
tails
S
0 1 X

Random ProcessesRandom Processes mapthe outcome of a randomexperiment to a signal(function of time).
heads
tails
signal associatedwith the outcome:
sample function
ense
mbl
e
A random process evaluated at aparticular time is a random variable
S

Random Process Terminology
The expected value, ensemble average or mean of a random process is:
The autocorrelation function (ACF) is:
Autocorrelation is a measure of how alike the random process is from one time instant to another.
Autocovariance:
dxxpxtxEtm ttx )()()(
212121
),()()(),( 2121 tttttt dxdxxxpxxtxtxEtt
( , ) ( , ) ( ) ( )t t t t m t m t1 2 1 2 1 2

Mean and Autocorrelation
Finding the mean and autocorrelation is not as hard as it might appear! Why: because oftentimes a random process can
be expressed as a function of a random variable. We already know how to work with functions of
random variables. Example:
This is just a function g() of :
We know how to find the expected value of a function of a random variable:
• To find this you need to know the pdf of .
)2sin()( ttx
)2sin()( tg
)2sin()()( tEgEtxE
a random variable

An Example
If is uniform between 0 and , then:
)2sin()( tEtmx
dpt )()2sin(
0
1)2sin( dt
)2cos(2
t
)2sin()2sin(),( 2121 ttEtt
dptt )()2sin()2sin( 21
0
21
1)2sin()2sin( dtt
)(2cos2
112 tt
2cos2
1)( 12 where tt

Stationarity A process is strict-sense stationary (SSS) if all
its joint densities are invariant to a time shift:
in general, it is difficult to prove that a random process is strict sense stationary.
A process is wide-sense stationary (WSS) if: The mean is a constant:
The autocorrelation is a function of time difference only:
If a process is strict-sense stationary, then it is also wide-sense stationary.
)(),...,(),()(),...,(),(
)(),()(),(
)()(
002121
02121
ttxttxttxptxtxtxp
ttxttxptxtxp
ttxptxp
NoxNx
oxx
oxx
xx mtm )(
12
21
where
)(),(
tt
tt

Properties of the Autocorrelation Function
If x(t) is Wide Sense Stationary, then its autocorrelation function has the following properties:
Examples: Which of the following are valid ACF’s?
2)( )0( txE this is the second moment
)()( even symmetry
)()0(

Power Spectral Density
Power Spectral Density (PSD) is a measure of a random process’ power content per unit frequency. Denoted (f). Units of W/Hz. (f) is nonnegative function. For real-valued processes, (f) is an even function.
The total power of the process if found by:
The power within bandwidth B is found by:
dffP )(
B
dffP )(

Wiener-Khintchine Theorem
We can easily find the PSD of a WSS random processes.
Wiener-Khintchine theorem: If x(t) is a wide sense stationary random process,
then:
i.e. the PSD is the Fourier Transform of the ACF. Example:
Find the PSD of a WSS R.P with autocorrelation:
deFf fj 2)()()(
TT
T
TTT
if0
if1)(

Example:
T
TTT
if0
if1)(

White Gaussian Noise
A process is Gaussian if any n samples placed into a vector form a Gaussian vector. If a Gaussian process is WSS then it is SSS.
A process is white if the following hold: WSS. zero-mean, i.e. mx(t) = 0. Flat PSD, i.e. (f) = constant.
A white Gaussian noise process: Is Gaussian. Is white.
• The PSD is (f) =N0/2
• N0/2 is called the two-sided noise spectral density.
Since it is WSS+Gaussian, then it is also SSS.

Linear Systems
The output of a linear time invariant (LTI) system is found by convolution.
However, if the input to the system is a random process, we can’t find X(f).
Solution: use power spectral densities:
This implies that the output of a LTI system is WSS if the input is WSS.
y(t)h(t)
x(t)
)()()( thtxty )()()( fHfXfY
2)()()( fHff xy

Example
A white Gaussian noise process with PSD of (f) =N0/2 = 10-
5 W/Hz is passed through an ideal lowpass filter with cutoff at 1 kHz.
Compute the noise power at the filter output.

Ergodicity
A random process is said to be ergodic if it is ergodic in the mean and ergodic in correlation: Ergodic in the mean:
Ergodic in the correlation:
In order for a random process to be ergodic, it must first be Wide Sense Stationary.
If a R.P. is ergodic, then we can compute power three different ways: From any sample function:
From the autocorrelation:
From the Power Spectral Density:
)()}({ txtxEmx
)()()()()( txtxtxtxEx
22/
2/
2 |)(||)(|1
lim txdttxT
PT
T
tx
)0(xxP
dffP xx )(
time average operator:
2/
2/
)(1
lim)(T
T
t dttgT
tg

Cross-correlation
If we have two random processes x(t) and y(t) we can define a cross-correlation function:
If x(t) and y(t) are jointly stationary, then the cross-correlation becomes:
If x(t) and y(t) are uncorrelated, then:
If x(t) and y(t) are independent, then they are also uncorrelated, and thus:
212121
),()()(),( 2121 ttttttxy dydxyxpyxtytxEtt
)()()( tytxExy
yxxy mm)(
)()()()( tyEtxEtytxE

Summary of Random Processes
A random process is a random function of time. Or conversely, an indexed set of random variables.
A particular realization of a random process is called a sample function.
),( 1stx
),( 2stx
),( 3stx
t
t
t
Furthermore, a Random Process evaluated at a particular point in time is a Random Variable.A random process is ergodic in the mean if the time average of every sample function is the same as the expected value of the random process at any time.

EE 561Communication Theory
Spring 2003
Instructor: Matthew Valenti
Date: Jan. 31, 2003
Lecture #8
Advanced Coding Techniques

Review Earlier this week:
Continued our discussion of quantization.• Quantization = source coding for continuous sources.
Lloyd-max algorithm.• Optimal quantizer design if source pdf is known.• Analogous to Huffman coding.
Scalar vs. vector quantization.• Performance can be improved by jointly encoding
multiple samples. As number of samples then R R(D). Vector quantization can take advantage of
correlation in the source. Even if the source is uncorrelated, vector
quantization achieves a shaping gain.• We computed the distortion of a vector quantizer.

Preview
K-means algorithm.• Optimal quantizer design when source pdf is unknown.• Analogous to Lempel-Ziv algorithm.
This time: Practical source coding for speech.
• Differential pulse code modulation.• Vocoding.
Reading: Proakis section 3.5

Coding Techniques for Speech
All speech coding techniques employ quantization.
Many techniques also use additional strategies to exploit the characteristics of human speech. Companding: Pass a nonuniform sample
through a nonlinearity to make it more uniform. Then sample with a uniform quantizer.-law and A-law.
DPCM. Vocoding.

Differential PCM
Speech is highly correlated. Given several past samples of a speech signal it is
possible to predict the next sample to a high degree of accuracy by using a linear prediction filter.
The error of the prediction filter is much smaller than the actual signal itself.
In differential pulse-code modulation (DPCM), the error at the output of a prediction filter is quantized, rather than the voice signal itself. DPCM can produce “toll-quality” speech at half the
normal bit rate (i.e. 32 kbps).

DPCM Block Diagram
DPCMSignal
Sample
PredictionFilter
PredictionFilter
Quantizer
DigitalCommunications
Channel
Decoder DAC
AnalogInputSignal
AnalogOutputSignal
-
+
+
+
Encode

DPCM Issues
The linear prediction filter is usually just a feedforward (FIR) filter. The filter coefficients must be periodically transmitted.
In adaptive differential pulse-code modulation (ADPCM), the quantization levels can be changed on the fly. Helpful if the input pdf changes over time (nonstationary). Used in DECT (Digital European Cordless Telephone).
Delta modulation is a special case of DPCM where there are only two quantization levels. Only need to know the zero-crossings of the signal
While DPCM works well on speech, it does not work well for modem signals. Modem signals are uncorrelated.

1.2 2.4 4.8 9.6 16 24 32 64
Unsatisfactory (1)
Poor (2)
Fair (3)
Good (4)
Excellent (5)
Bit Rate (kbps)
Mean Opinion Score(MOS)
Toll quality
Communicationsquality
Waveform codersVocoders
Tradeoff: Voice Quality versus Bit Rate
The bit rate produced by the voice coder can be reduced at a price. Increased
hardware complexity.
Reduced perceived speech quality.

Waveform Coding and Vocoding
For high bit rates (16-64 kbps) it is sufficient to just sample and quantize the time domain voice waveform. This is called waveform coding. DPCM is a type of waveform coding.
For low bit rate voice encoding it is necessary to mathematically model the voice and transmit the parameters associated with the model. Process of analysis and synthesis. Called vocoding. Most vocoding techniques are based on linear predictive
coding (LPC).

Linear Predictive Coding
Linear predictive coding is similar to DPCM with the following exceptions: The prediction filter is more complex
• more taps in the FIR filter. The filter coefficients are transmitted more frequently
• once every 20 milliseconds.
• The filter coefficients are quantized with a vector quantizer. The error signal is not transmitted directly
• The error signal can be though of a type of noise.
• Instead the statistics of the “noise” are transmitted Power level Whether voiced (vowels) or unvoiced (consonants)
• This is where the big savings (in terms of bit rate) comes from.

Vocoder standards Vocoding is the single most important technology
enabling digital cell phones. RPE-LTP
Regular Pulse Excited Long Term Prediction. Used in GSM (European Digital Cellular) 13 kbps.
VSELP Vector Sum Excited Linear Predictive Coder. Used in USDC, IS-136 (US Digital Cellular). 8 kbps.
QCELP Qualcomm Code Excited Linear Predictive Coder. Used in IS-95. (US Spread Spectrum Cellular) Variable bit rate (full, half, quarter, eighth) Original full rate was 9.6 kbps. Revised standard (QCELP13) uses 14.4 kbps.

Preview of Next Week
Sample
Quantize
Source Encode
Encryption
ChannelEncoder
Modulator Channel
D/A Conversion
Decryption
Source Decoder
ChannelDecoder
Equalizer
Demodulator
AnalogInputsignal
AnalogOutputsignal
DigitalOutput
DirectDigitalInput
we have beenlooking at thispart of thecommunicationsystem(Part 1 of 4)
Now, we will start looking at this partof the communication system. (Part 2 of 4)

Modulation Principles
Almost all communication systems transmit data using a sinusoidal carrier waveform. Electromagnetic signals propagate well. Choice of carrier frequency allows placement of
signal in arbitrary part of spectrum. Modulation is implemented in practice by:
Processing digital information at baseband. Pulse shaping and filtering of digital waveform. Baseband signal is mixed with signal from
oscillator to bring up to RF. Radio frequency (RF) signal is filtered amplified
and coupled with antenna.

Modulator: Simplified Block Diagram
Baseband Processing:Source Coding
Channel Coding, etc.
Pulse-shapingFilter
Digital/AnalogConverter
Filter andAmplify
data bits
code bits (symbol)
data rate
symbol rate
oversampled ~10X symbol rate
cos(2fct)baseband section RF section
antenna

Modulation
Modulation shifts the spectrum of a baseband signal to that it becomes a bandpass signal.
A bandpass signal has non-negligible spectrum only about some carrier frequency fc >> 0 Note: the bandwidth of a bandpass signal is the range
of positive frequencies for which the spectrum is non-negligible.
Unless otherwise specified, the bandwidth of a bandpass signal is twice the bandwidth of the baseband signal used to create it.
BW=B BW=2B

Modulation
Common digital modulation techniques use the data value to modify the amplitude, phase, or frequency of the carrier. Amplitude: On-off keying (OOK)
• 1 A cos(2fct)• 0 0
More generally, this is called amplitude shift keying (ASK). Phase: Phase shift keying (PSK)
• 1 A cos(2fct)• 0 A cos(2fct + ) = - A cos(2fct)
Frequency: Frequency shift keying (FSK)• 1 A cos(2f1t)• 0 A cos(2f2t)

copyright 2003
EE 561 Communication Theory
Spring 2003
Instructor: Matthew Valenti
Date: Feb 5, 2003
Lecture #10
Representation of Bandpass Signals

© 2
003
Announcements Homework #2 is due today.
I’ll post solutions over the weekend. Including solutions to all problems from chapter 3.
Computer assignment #1 is due next week. See webpage for details.
Today: Vector representation of signals Sections 4.1-4.2

© 2
003
Review/Preview
Sample
Quantize
Source Encode
Encryption
ChannelEncoder
Modulator Channel
D/A Conversion
Decryption
Source Decoder
ChannelDecoder
Equalizer
Demodulator
AnalogInputsignal
AnalogOutputsignal
DigitalOutput
DirectDigitalInput
we have beenlooking at thispart of thecommunicationsystem
Now, we will start looking at this partof the communication system.

© 2
003
Representation of Bandpass Signals(EE 461 Review)
A bandpass signal is a signal that has a bandwidth that is much smaller than the carrier frequency. i.e. most of the spectral content is not at DC. Otherwise, it is called baseband or lowpass.
Bandpass signals can be represented in any of three standard formats: Quadrature notation. Complex envelope notation. Magnitude and phase notation.

© 2
003
Standard Notationsfor Bandpass Signals
Quadrature notation
x(t) and y(t) are real-valued lowpass signals called the in-phase and quadrature components of s(t).
Complex envelope notation
sl(t) is the complex envelope of s(t).
sl(t) is a complex-valued lowpass signal.
s t x t f t y t f tc c( ) ( )cos ( )sin 2 2 b g b g
s t x t jy t e s t ej f tl
j f tc c( ) Re ( ) ( ) Re ( ) a f 2 2

© 2
003
More Notation forBandpass Signals
Magnitude and phase notation
Where a(t) is the magnitude and (t) is the phase of s(t). a(t) and (t) are both real-valued lowpass signals.
Relationship among notations:
s t a t f t tc( ) ( )cos ( ) 2 b g
a t x t y t( ) ( ) ( ) 2 2
( ) tan( )
( )t
y t
x t
LNM
OQP
1
x t a t t( ) ( )cos ( ) a fy t a t t( ) ( )sin ( ) a f
s t x t jy tl ( ) ( ) ( )

© 2
003
Key Points
With these alternative representations, we can consider bandpass signals independently from their carrier frequency.
The idea of quadrature notation sets up a coordinate system for looking at common modulation types. Idea: plot in 2-dimensional space.
• x axis is the in-phase component.
• y axis is the quadrature component. Called a signal constellation diagram.

© 2
003
Example Signal Constellation Diagram: BPSK
y t( ) 0kpx t( ) , 1 1k p

© 2
003
Example Signal Constellation Diagram: QPSK
y t( ) , 1 1k px t( ) , 1 1k p
QPSK: Quadri-phase shift keying

© 2
003
Example Signal Constellation Diagram: QAM
QAM: Quadrature Amplitude Modulation
x t( ) , , , 3 1 1 3l qy t( ) , , , 3 1 1 3l q

© 2
003
Interpretation of Signal Constellation Diagrams
Axis are labeled with x(t) and y(t). Possible signals are plotted as points. Signal power is proportional to distance from origin. Probability of mistaking one signal for another is
related to the distance between signal points. The received signal will be corrupted by noise. The receiver selects the signal point closest to the
received signal.

© 2
003
Example: A Received QAM Transmission
x t( ) , , , 3 1 1 3l qy t( ) , , , 3 1 1 3l q
received signal

© 2
003
A New Way of Viewing Modulation
The quadrature way of viewing modulation is very convenient for some modulation types. QAM and M-PSK.
We will examine an even more general way of looking at modulation by using signal spaces. We can study any modulation type.
By choosing an appropriate set of axes for our signal constellation, we will be able to: Design modulation types which have desirable properties. Construct optimal receivers for a given modulation type. Analyze the performance of modulation types using very
general techniques.
First, we must review vector spaces …

© 2
003
Vector Spaces
An n-dimensional vector consists of n scalar components
The norm (length) of a vector v is given by:
The inner product of two vectors and is given by:
v v v vn1 2, ,...,v v vn1 2, ,...,l q
v1 1 1 1 2 1 v v v n, , ,, ,...,
v2 2 1 2 2 2 v v v n, , ,, ,...,
v vii
n2
1
v v1 2 1 21
v vi ii
n
, ,

© 2
003
Basis Vectors
A vector v may be expressed as a linear combination of its basis vectors
ei is normalized if it has unit length
If ei is normalized, then vi is the projection of v onto ei
Think of the basis vectors as a coordinate system (x,y,z,… axes) for describing the vector v. What makes a good choice of coordinate system?
e e e1 2, ,..., nl qv e
vi ii
n
1
vi i e v
ei 1

© 2
003
Complete Basis
The set of basis vectors is complete or spans the vector space n if any vector v can be represented as a linear combination of basis vectors:
The set of basis vectors is linearly independent if no one basis vector can be represented as a linear combination of the remaining vectors. The n vectors must be linearly independent in order to span
n.
e e e1 2, ,..., nl q
v e vi ii
n
1

© 2
003
Given the following vector space:
Which of the following is a complete basis?
e1
1
0LNM
OQP e2
1
0
LNM
OQP
e1
1
0LNM
OQP e2
0
1LNM
OQP
e1
1
1LNM
OQP e2
1
1
LNM
OQP
Example: Complete Basis
v1
0
0LNM
OQPv2
0
1LNM
OQP v3
1
0LNM
OQP v4
1
1LNM
OQP

© 2
003
Orthonormal Basis
Two vectors vi and vj are orthogonal if
A basis is orthonormal if: All basis vectors are orthogonal to one-another. All basis vectors are normalized.
v vi j 0

© 2
003
Which of the following is a complete orthonormal basis?
e1
1
0LNM
OQP e2
0
1LNM
OQP
e1
1
1LNM
OQP e2
1
1
LNM
OQP
e1
1 2
1 2LNM
OQP
/
/e2
1 2
1 2
LNM
OQP
/
/
Example: Complete Orthonormal Basis
e1
1
1LNM
OQP e2
1
0
LNM
OQP
e2
1
0
LNM
OQPe1
1 2
1 2LNM
OQP
/
/

copyright 2003
EE 561 Communication Theory
Spring 2003
Instructor: Matthew Valenti
Date: Feb 21, 2003
Lecture #16

© 2
003
Announcements
HW #3 is due on Monday. “sigspace.m” is on web-page.

© 2
003
Review
Sample
Quantize
Source Encode
Encryption
ChannelEncoder
Modulator Channel
D/A Conversion
Decryption
Source Decoder
ChannelDecoder
Equalizer
Demodulator
AnalogInputsignal
AnalogOutputsignal
DigitalOutput
DirectDigitalInput
We have been looking at this partof the system.

© 2
003
Digital Signaling over AWGN Channel
System model:
Signal space representation:
+s t s t s t s tM( ) ( ), ( ),..., ( ) 1 2l q
n(t)Gaussian
nn
Naf af 0
2
r t s t n taf af af
r t r f t n tk kk
K
( ) ( ) ' ( )
1
basis functions for s(t)
orthogonal noise --- disregard.r r t f t dt
s t f t dt n t f t dt
s n
k k
T
k
T
k
T
m k k
zz z
( ) ( )
( ) ( ) ( ) ( )
,
0
0 0

© 2
003
Receiver Overview
Frontend
Backend
r t( ) r s
Goal: obtain the vectorof sufficient statistics rfrom the received signal r(t).
Implementation: either analogelectronics, or digital electronicsworking at several (3-10) samples per symbol period T.
Options:Correlation receiverMatched-filter receiver
Goal: obtain an estimate of thetransmitted signal given the vector r.
Implementation: Digital signal processing operating at the symbolperiod. One vector sample persymbol period.
Options:MAP receiverML receiver

Front End Design #1:Bank of Correlators
zdtT
0
f t1( )
r t( ) r1
zdtT
0
f tK ( )
rK
r L
NMMMO
QPPP
r
rK
1

Front End Design #2:Bank of Matched Filters
r t( ) r1
h t f T tK K( ) ( ) rK
r L
NMMMO
QPPP
r
rK
1
t T
h t f T t1 1( ) ( ) t T

© 2
003
MAP Decision Rule arg max |s
sr s
S
m
p pm m
b gm r
arg max exp/ ,s
s
FHGG
IKJJ
RS|T|
UV|W|
m
p Nr s
Nm o
K k m k
ok
K
b g c h2
2
1
substitute conditional pdf ofr given sm (vector Gaussian)
arg max ln exp/ ,s
s
FHGG
IKJJ
LNMM
OQPP
RS|T|
UV|W|
m
p Nr s
Nm o
K k m k
ok
K
b g c h2
2
1
take natural log
arg max ln ln ln exp/ ,s
s
FHGG
IKJJ
LNMM
OQPP
RS|T|
UV|W|
m
p Nr s
Nm o
K k m k
ok
Kbg b g c h 2
2
1
use ln(xy) =ln(x) + ln(y)
arg max ln ln ,ss
R
S|T|
UV|W|
m
pK
Nr s
Nm ok m k
ok
Kbg b g c h2
2
1
use ln(xy) = yln(x)and ln(exp(x)) = x
arg max ln ln ,ss
RST
UVW
m
pK
NN
r sm oo
k m kk
Kbg b g c h2
1 2
1
pull 1/No out of summation

© 2
003
MAP Decision Rule(Continued)
arg max ln ln , ,ss
RST
UVW
m
pK
NN
r s r sm oo
k m k k m kk
Kbg b g c h2
122 2
1
square term in summation
arg max ln , ,ss
RST
UVW
m
pN
s r smo
m k k m kk
Kbg c h12 2
1
eliminate terms that are commonto all sm
arg max ln , ,ss
RST
UVW
m
pN
s rN
smo
m k kk
K
om k
k
Kbg 2 1
1
2
1
Break up the one summationinto two summations
arg max ln ,ss
RST
UVW
m
pN
s rNm
om k k
k
Km
o
bg 2
1
E Use definition of signal energy:
Em m
T
m kk
K
s t dt s z
( ) ,
2
0
2
1
arg max ln ,ss
RST
UVW
m
Np s ro
m m k kk
Km
2 21
bg E Multiply by No/2
We use this equation to design theoptimal MAP receiver!

Back End Design #1:MAP Decision Rule
S L
NMMM
O
QPPP
s s
s s
K
M M K
1 1 1
1
, ,
, ,
z Srr
z1
Npo
2 211lnbg E
zM
Npo
MM
2 2lnb g E
chooselargest
s
z s rm m k kk
K
,
1

© 2
003
ML Decision Rule
ML is simply MAP with pm = 1/M
arg max |ss
r sS
m
p m
b gm r
arg max ,ss
RST
UVW
m
s rm k kk
Km
1 2
E
arg maxss
RSTUVWm
zmmE2

Back End Design #2:ML Decision Rule
If pm’s are unknown or all equal, then use the ML (maximum likelihood) decision rule:
S L
NMMM
O
QPPP
s s
s s
K
m M K
1 1 1
1
, ,
, ,
z Srr
z1
E1
2
zM
EM
2
chooselargest
s

© 2
003
Example
Start with the following signal set:
What kind of modulation is this? What is the energy of each signal?
0 1 2
s t1( )
0 1 2
s t2 ( )
0 1 2s t4 ( )
0 1 2
s t3( )

Concept of the Correlation Receiver
Concept Correlate the received signal against all 4 possible transmitted
signals. Pick most likely after accounting for pm.
zdtT
0
s t1( )
r t( )
zdtT
0
s t4 ( )
Npo
2 1lnbg
Npo
M2lnb g
chooselargest
s
z1
zM

© 2
003
Signal Space Representation
Note: the previous receiver is not an efficient implementation. 4 correlators were used. Could we use fewer correlators?
• We can answer this by using the concept of signal space!
Using the following basis functions:
Find the signal vectors and signal space diagram.
0 1 2
f t1( ) f t2 ( )
0 1 2

A More Efficient MAP Receiver
zdtT
0
f t1( )
r t( )N
po
2 1lnbg
chooselargest
s
z r r1 1 2
f t2 ( )
r1
zdtT
0
r2
mat
rix
mul
tipl
y:z=
Sr N
po
2 2lnbgz r r2 1 2
Npo
2 3lnbgz r r3 1 2
Npo
2 4lnbgz r r4 1 2
S
s
s
s
s
L
N
MMMM
O
Q
PPPP
L
N
MMMM
O
Q
PPPP
1
2
3
4
1 1
1 1
1 1
1 1
T
T
T
T

The ML Receiver
zdtT
0
f t1( )
r t( )
chooselargest
s
z r r1 1 2
f t2 ( )
r1
zdtT
0
r2
mat
rix
mul
tipl
y:z=
Sr
z r r2 1 2
z r r3 1 2
z r r4 1 2
S
s
s
s
s
L
N
MMMM
O
Q
PPPP
L
N
MMMM
O
Q
PPPP
1
2
3
4
1 1
1 1
1 1
1 1
T
T
T
T

Decision Regions
The decision regions can be shown on the signal space diagram. Example: Assume pm = ¼ for m={1,2,3,4} Thus MAP and ML rules are the same.

© 2
003
Average Energy Per Bit
The energy of the mth signal (symbol) is:
The average energy per symbol is:
log2M is the number of bits per symbol.
Thus the average energy per bit is:
Eb allows for a fair comparison of the energy efficiencies of different signal sets. We use Eb/No for comparison.
Em m kk
K
s ,
2
1
E E Es m m mk
M
E p
1
EE
bs
M
log2

© 2
003
Visualizing Signal Spaces
A MATLAB function has been posted on the web page that allows you to visualize two-dimensional signal spaces and the associated decision regions.
Usage: sigspace( [x1 y1 p1; x2 y2 p2; …; xM yM pM],
EbNodB ) where:
• (xm,ym) is the coordinate of the mth signal point • pm is the probability of the mth signal
can omit this to get ML receiver
• EbNodB is Eb/No in decibels.

Example: QPSK with ML Decision Rule
sigspace( [1 1;1 –1; -1 1; -1 –1], 10 )
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
X
Y
Signal Space and Decision Regions

-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
X
Y
Signal Space and Decision Regions
Example: QPSK with Unequal Probabilities
sigspace( [1 1 .3;1 –1 .3; -1 1 .3; -1 –1 .1], 2 )

Example: Extreme Case of Unequal Probabilities
sigspace( [.5 .5 .3;.5 –.5 .3; -.5 .5 .3; -.5 –.5 .1], -6 )
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
X
Y
Signal Space and Decision Regions

Example: Unequal Signal Energy
sigspace( [1 1; 2 2; 3 3; 4 4], 10)
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
4
X
Y
Signal Space and Decision Regions

-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
X
Y
Signal Space and Decision Regions
Example: 16-QAM sigspace( [0.5 0.5; 1.5 0.5; 0.5 1.5; 1.5 1.5; ...
-0.5 0.5; -1.5 0.5; -0.5 1.5; -1.5 1.5; ...0.5 -0.5; 1.5 -0.5; 0.5 -1.5; 1.5 -1.5; ...-0.5 -0.5; -1.5 -0.5; -0.5 -1.5; -1.5 -1.5], 10 )

copyright 2003
EE 561 Communication Theory
Spring 2003
Instructor: Matthew Valenti
Date: Feb. 26, 2003
Lecture #18
QPSK and the Union Bound

© 2
003
Assignments HW #4 is posted.
Due on Monday March 10.
HW #3 solutions posted. Full chapter 4 solutions included.
Computer Assignment #2 Will be posted later this week. Will be due on Monday March 24. I encourage you to finish before the exam.
Midterm exam discussion. Scheduled for March 14. We might have a faculty candidate that day and thus may
need to reschedule. Options: Thursday evening 5-7 PM or short-fuse take-home?

© 2
003
Mid-term Exam Exam Guidelines:
Timed exam. Limited to 2 hours.• Option (1): Thursday 5-7 PM.• Option (2): Handed out Wed. 3 PM. Due Fri. 3 PM.
But you are not to work more than 2 hours on it.• Same exam either way.
Open book and notes. No help from classmates or from me.
• Must sign pledge and not discuss it.• If anyone asks you about the exam, you should tell me who.
Covers chapters 1-5, and HW 1-4.• Computer assignment 1 & 2 are also relevant.
Two sample exams posted on the webpage.• From 2000 and 2001.• Should be able to do everything except #1 on 2001 exam.

© 2
003
Review: Receiver Overview
Frontend
Backend
r t( ) r s
r r t f t dt
s t f t dt n t f t dt
s n
k k
T
k
T
k
T
m k k
zz z
( ) ( )
( ) ( ) ( ) ( )
,
0
0 0
MAP rule:
arg max ln ,ss
RST
UVW
m
Np s ro
m m k kk
Km
2 21
bg E
ML rule:
arg max ,ss
RST
UVW
m
s rm k kk
Km
1 2
E

© 2
003
Error Probability
Symbol error probability:P
p
s
mm
M
m m
Pr
Pr |
s s
s s s s1
From “Total probability theorem”
Probability that sm was sent. Probability of error given that sm was sent:
Pr | Pr |
|
Pr |
|
s s s s r s s
r s r
r s s
r s r
z
z
m m m m
m
R
m m
m
R
R
p d
R
p d
m
m
b g
b g1
1
Probability that the received vector isnot in the decision region Rm, given that sm was sent.

© 2
003
Comments on Error Calculation
For K>1, the integral is multidimensional. Recall that difficult multidimensional integrals can be
simplified by rotation or translation of coordinates. This is similar to change of variables in 1-D integrals.
Error probability depends on the distance between signals.
Error probability does not depend on the choice of coordinates.
Therefore, any translation, rotation, or reflection operation on the coordinates that does not change the distance between the signals will not affect the error probabilities.

© 2
003
QPSK: Definition
Now consider quartenary phase shift keying: Signals:
Using Gram-Schmidt orthonormalization we find two basis functions:
Now:
s t P f tc1 2 2( ) cos b g for 0 < t < T
s t P f tc2 2 2( ) sin b g for 0 < t < T
f tT
f tc1
22( ) cos b g for 0 < t < T
s t P f tc3 2 2( ) cos b g for 0 < t < T
s t P f tc4 2 2( ) sin b g for 0 < t < T
f tT
f tc2
22( ) sin b g for 0 < t < T
PT
s t dtT T
Ts b z1 22
0
( )E E

© 2
003
QPSK: Signal Space Representation
Signal vectors:
Signal space diagram:
Es
s2
s1
Es
s10
LNM
OQP
Es s2
0LNM
OQPEs
s30
LNM
OQP
Es s4
0
LNM
OQPEs
Es
Es
s3
s4
R1
R2
R4
R3

© 2
003
QPSK: Coordinate Rotation
The analysis is easier if we rotate coordinates by 45o:
s2 s1
s3 s4
R1R2
R4R3
s12
2
L
N
MMMM
O
Q
PPPP
E
E
s
s
s22
2
L
N
MMMM
O
Q
PPPP
E
E
s
s
s32
2
L
N
MMMM
O
Q
PPPP
E
E
s
s
s42
2
L
N
MMMM
O
Q
PPPP
E
E
s
s

© 2
003
QPSK: Conditional Error ProbabilityPr | |
, | ,
exp
exp exp
, ,
s s s s r s r
FHG
IKJ
FHG
IKJ
LNMM
OQPP
RS|T|
UV|W|
FHG
IKJ
RS|T|
UV|W|
F
zzzzzz
1 1 1
1 2 1 1 1 2 1 2
00
1
2
2
2
1 2
00
1
2
1
0
2
1
1
11 1
2 2
11 1
2
1 1
2
1
p d
p r r s s dr dr
N Nr r dr dr
N Nr dr
N Nr
R
o o
s s
o o
s
o o
s
b g
c h
E E
E E
HGIKJ
RS|T|
UV|W|
FHG
IKJ
LNMM
OQPP
FHG
IKJ
LNMM
OQPP
FHG
IKJ
FHG
IKJ
LNMM
OQPP
z2
2
0
2
1 1 1
2
dr
QN
QN
QN
QN
s
o
s
o
s
o
s
o
E E
E E

© 2
003
QPSK: Symbol Error Probabilty
From symmetry:
Thus:
Pr |s s s s FHG
IKJ
FHG
IKJ
LNMM
OQPPm m
s
o
s
o
QN
QN
2
2
E E
P
p
QN
QN
QN
QN
s
mm
M
m m
s
o
s
o
b
o
b
o
FHG
IKJ
FHG
IKJ
LNMM
OQPP
FHG
IKJ
FHG
IKJ
LNMM
OQPP
Pr
Pr |
s s
s s s s1
2
2
2
22 2
E E
E E

© 2
003
QPSK: Bit Error Probability
Assume Gray Mapping:
00
1011
01
P QN
QN
QN
QN
QN
bb
o
b
o
b
o
b
o
b
o
FHG
IKJ
FHG
IKJ
LNMM
OQPP
FHG
IKJ
FHG
IKJ
LNMM
OQPP
FHG
IKJ
2
2
2 2
2 2 2
2
2
E E
E E E
If neighbor ismistakenly chosenthen only 1 bit willbe wrong,i.e. Pb = Ps/2
If opposite signalis chose then bothbits are incorrect,i.e. Pb = Ps
Q2(z) << Q(z)Same BER as BPSK

© 2
003
Error Probability for Large M
In theory, we can compute any symbol error probability using the appropriate integrals.
In practice, this becomes tedious for large constellations (M >4). The decision region Rj has complicated shape.
Pr | Pr |
|
Pr |
|
s s s s r s s
r s r
s s s s
r s r
z
z
i i i i
i
R
j ijj i
M
i
Rjj i
M
R
p d
p d
i
j
b g
b g1
1

© 2
003
Conditional Error Probabilities
Consider the following term for QPSK:
We must integrate over the R4: This is tricky because R4 has two boundaries.
Pr | |s s s s r s r z4 1 1
4
p dR
b g
R1R2
R4R3
s2 s1
s3 s4

© 2
003
We can bound this probability by only integrating over a region with just one boundary:
Now this is easier to evaluate:
A Bound on Probability
Pr | Prs s s s 4 1 4 1z z
R1R2
R4R3 Ignore the presenceof s2 and s3.Then we pick s4 over s1 wheneverz4 z1
Pairwise error probability:If we may only choose between s1 and s4 Then prob. of picking s4 over s1
s2 s1
s3 s4

© 2
003
Calculation of Pairwise Error Prob.
By appropriate rotation & translation, we can express the pairwise decision problem as:
This is just like BPSK!
di j,
2
s j si
di j,
2
RiRj
Pr | Pr
,
s s s s
FHG
IKJ
j i j i
i j
o
z z
Qd
N2

© 2
003
The Union Bound
Putting it all together:
And the symbol error probability becomes:
This is called the Union bound.
Pr | |
Pr
,
s s s s r s r
FHG
IKJ
z
i i i
Rjj i
M
j ijj i
M
i j
ojj i
M
p d
z z
Qd
N
j
b g1
1
1 2
P p
p Qd
N
s ii
M
i i
ii
Mi j
ojj i
M
FHG
IKJ
1
1 1 2
Pr |
,
s s s s

© 2
003
Example: QPSK
Find Union bound on Ps for QPSK:

© 2
003
Consider the exact calculation:
Now consider the Union bound:
Pr | |s s s s r s r z
1 12
4
p di
Rjj
b g
R1R2
R4R3
Pr | ,s s s s FHG
IKJ
1 11
2
4
2Q
d
Nj
oj
R1
R4
This area has beenAccounted for alreadyNo need to include it.
s2 s1
s3 s4
s2 s1
s3 s4

© 2
003
Improved Union Bound
Let Ai be the set of signals with decision regions directly adjacent to Ri
Share a common boundary
Then:
Example: QPSK
P p Qd
Ns ii
Mi j
oj A
M
i
FHG
IKJ
1 2
,
s2 s1
s3 s4
R1
R4

© 2
003
Comparison
0 1 2 3 4 5 6
10-2
10-1
Eb/No in dB
BE
RPerformance of QPSK
Union bound
Improved Union bound
Exact

© 2
003
Mid-Semester!
Right now, we are at the midpoint of this class.

copyright 2003
EE 561 Communication Theory
Spring 2003
Instructor: Matthew Valenti
Date: Feb. 28, 2003
Lecture #19
PAM, PSK, and QAM

© 2
003
Review: Union Bound
The symbol error rate of any digital modulation over an AWGN channel can be found using the Union bound:
A better bound (tighter and easier to compute) can be found using:
P Qd
Ns ii
Mi j
ojj i
M
FHG
IKJ
Pr[ ] ,s s1 1 2
d d
s s
i j i j
i j
i k j kk
K
,
, ,
( , )
s s
s s
c h2
1
P Qd
Ns ii
Mi j
oj Ai
FHG
IKJ
Pr[ ] ,s s1 2
A j R Ri j i : borders m r

© 2
003
Consider the exact calculation:
Now consider the Union bound:
Pr | |s s s s r s r z
1 12
4
p di
Rjj
b g
R1R2
R4R3
Pr | ,s s s s FHG
IKJ
1 11
2
4
2Q
d
Nj
oj
R1
R4
This area has beenAccounted for alreadyNo need to include it.
s2 s1
s3 s4
s2 s1
s3 s4

© 2
003
Improved Union Bound
Let Ai be the set of signals with decision regions directly adjacent to Ri
Share a common boundary
Then:
Example: QPSK
P p Qd
Ns ii
Mi j
oj A
M
i
FHG
IKJ
1 2
,
s2 s1
s3 s4
R1
R4

© 2
003
Categories of Digital Modulation
Digital Modulation can be classified as: PAM: pulse amplitude modulation PSK: phase shift keying QAM: quadrature amplitude modulation Orthogonal signaling Biorthogonal signaling Simplex signaling
We have already defined and analyzed some of these.
For completeness, we will now define and analyze all of these formats.
Note: the definition & performance only depends on the geometry of the signal constellation --- not the choice of basis functions!

© 2
003
Bandwidth of Digital Modulation
The bandwidth W of a digitally modulated signal must satisfy:
The actual bandwidth depends on the choice of basis functions. “pulse shaping” For sinc-pulses this is an equality.
However, if the basis functions are confined to time [0,T], then:
WKR KR
Ms b
2 2 2log
W KRKR
Msb
log2

© 2
003
PAMPulse Amplitude Modulation
K = 1 dimension. Usually, the M signals are equally spaced
along the line. di,j = dmin (a constant) for |j-i| = 1
Usually, the M signals are symmetric about the origin.
Examples:0
0
dmin
s1 s8
si i Md
LNM
OQP( ) min2 1
2

© 2
003
Performance of PAM
Using the Improved Union bound:
There are two cases to consider:
P Qd
N
MQ
d
N
s ii
Mi j
oj A
i j
oj Ai
M
i
i
FHG
IKJ
FHG
IKJ
Pr[ ] ,
,
s s1
1
2
1
2
outer points have only 1 neighborthere are 2 of these
inner points have 2 neighborsthere are (M-2) of these
assuming equiprobablesignaling

© 2
003
Performance of PAM
For the “outer” points (one neighbor):
For the “inner” points (two neighbors):
Therefore,
P Qd
Ni i Mi i
o
| mins s s FHG
IKJ
21 for and
P Qd
Ni Mi i
o
| mins s s FHG
IKJ 2
22 1 for
P p PM
P
MM Q
d
NQ
d
N
M
MQ
d
N
s ii
M
i i i ii
M
o o
o
FHG
IKJ
FHG
IKJ
FHG
IKJ
F
HGIKJ
1 1
1
12 2
22
2
2 1
2
| |
( )
( )
min min
min
s s s s s s

© 2
003
Performance of PAM
Using the Improved Union bound:
We would like an expression in terms of Eb.
However, unlike other formats we have considered, the energy of the M signals is not the same.
Ei i Md
LNM
OQP( ) min2 1
2
2
PM
MQ
d
Nso
F
HGIKJ
2 1
2
( ) min

© 2
003
PAMAverage Energy per Symbol
E Es i ii
M
i
M
i
M
n
M
p
Mi M
d
M
di M
M
dn
M
d M M
d M
LNM
OQP
FH IK
FH IK
FH IK FHIKFHIKFHG
IKJ
1
2
1
22
1
22
1
2
2 2
2 2
12 1
2
1
22 1
2
22 1
2
2
1
3 24
21
1
12
( )
( )
( )
min
min
min/
min
minc h
assuming equiprobablesignaling
from symmetry
arithmetic series: ( )2 1
1
34 1
2
1
2
n
N N
n
N
c h

© 2
003
Performance of PAM
Solve for dmin:
Substitute into Union Bound Expression:
Bit error probability:
dM
smin
12
12
E
c h
PM
MQ
d
N
M
MQ
M N
M
MQ
M
M N
s
o
s
o
b
o
F
HGIKJ
FHGG
IKJJ
FHGG
IKJJ
2 1
2
2 1 6
1
2 1 6
1
2
22
( )
( )
( ) log
min
E
E
c h
c h
PM
M MQ
M
M Nb
b
o
FHGG
IKJJ
2 1 6
12
22
( )
log
logE
c hIf Gray coding used,only 1 bit error willnormally occur whenthere is a symbol error.
Eq. (5.2-46)

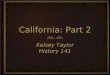
Performance Comparison: PAM Performance gets worse as M increases
0 2 4 6 8 10 12 14 16 18 2010
-8
10-6
10-4
10-2
100
Eb/No (dB)
BE
R
32-PAM
8-PAM
16-PAM
2-PAM
4-PAM

© 2
003
MPSKM-ary Phase Shift Keying
K = 2 dimensions. Signals equally spaced along a circle of
radius Es
si
s
s
i
Mi
M
FH IKFH IK
L
N
MMMM
O
Q
PPPP
E
E
cos( )
sin( )
2 1
2 1
Example: 8 PSK

© 2
003
MPSK: Distances
Distance between two adjacent points:
Use law of cosines:
dij
Es
Es
2M
radians
2 2 2 2ab C a b ccos 2
22
2 12
4
2
2
2
E E
E
E
E
s s ij
ij s
ij s
ij s
Md
dM
dM
dM
cos
cos
sin
sin
FH IK
FH IKLNM
OQP
FHIK FHIK
1 2 2 2 cos sin af

© 2
003
Performance of M-PSK
Symbol error probability (M>2):
Bit error probability (M>2):
P QN M
QM
N M
ss
o
b
o
FHIKFHG
IKJ
FHIKFHG
IKJ
22
22 2
E
E
sin
logsin
PM
QM
N Mbb
o
FHIKFHG
IKJ
2 2
2
2
log
logsin
E

0 2 4 6 8 10 12 14 16 18 2010
-8
10-6
10-4
10-2
100
Eb/No in dB
BE
R
Performance Comparison:M-PSK
Performance gets worse as M increases.
4-PSK 8-PSK
32-PSK
16-PSK
64-PSK

© 2
003
QAMQuadrature Amplitude Modulation
K = 2 dimensions Points can be placed anywhere on the plane. Actual Ps depends on the geometry. Example: 16 QAM
dmin
Corner points have 2 neighbors(There are 4 of these)
Edge points have 3 neighbors(There are 8 of these)
Interior points have 4 neighbors(There are 4 of these)

© 2
003
Performance of ExampleQAM Constellation
Improved Union Bound:
P p P
P
Qd
NQ
d
NQ
d
N
Qd
N
Qd
N
s ii
M
i i
i ii
M
o o o
o
o
FHG
IKJ
LNMM
OQPP
FHG
IKJ
LNMM
OQPP
FHG
IKJ
LNMM
OQPP
FHG
IKJ
FHG
IKJ
FHG
IKJ
1
1
1
16
1
164 2
28 3
24 4
2
48
16 2
32
|
|
min min min
min
min
s s s
s s s

© 2
003
Performance of ExampleQAM Constellation
We would like to express Ps in terms of Eb.
However, as with PAM, the energy of the M signals is not the same.
E
E
E
i
i
i
d dd
d dd
d dd
FHG
IKJ
FHG
IKJ
FHG
IKJ
FHG
IKJ
FHG
IKJ
FHG
IKJ
3
2
3
2
9
2
2
3
2
5
2
2 2
1
2
2 2
2
2 2
2
2 2
2
min minmin
min minmin
min minmin
Corner points
Edge points
Interior points

© 2
003
QAMAverage Energy per Symbol
Average Energy per Symbol:
Solving for dmin
E Es i ii
p
d d d
d
d
FHG
IKJ F
HGIKJ F
HGIKJ
LNM
OQP
1
16
2 2 2
2
2
1
164
9
28
5
24
1
2
40
165
2
min min min
min
min
assuming equiprobablesignaling
d smin
2
5
E

© 2
003
Performance of ExampleQAM Constellation
Substitute into Union Bound Expression:
For other values of M, you must compute Ps in this manner.
Relationship between Ps and Pb depends on how bits are mapped to symbols.
P Qd
N
QN
QN
s
o
s
o
b
o
FHG
IKJ
FHG
IKJ
FHG
IKJ
32
35
34
5
min
E
E

0 2 4 6 8 10 12 14 16 18 2010
-8
10-6
10-4
10-2
100
Eb/No in dB
Comparison:QAM vs. M-PSK
Performance of QAM is better than M-PSK.
16-QAM
16-PSK
sym
bol e
rror
pro
babi
lity
16-PAM

copyright 2003
EE 561 Communication Theory
Spring 2003
Instructor: Matthew Valenti
Date: Mar. 3, 2003
Lecture #20
Orthogonal, bi-orthogonal,
and simplex modulation

© 2
003
Review: Performance of Digital Modulation
We have been finding performance bounds for several modulation types defined in class. The Union bound:
The Improved Union bound:
P Qd
Ns ii
Mi j
ojj i
M
FHG
IKJ
Pr[ ] ,s s1 1 2
P Qd
Ns ii
Mi j
oj Ai
FHG
IKJ
Pr[ ] ,s s1 2
A j R Ri j i : borders m r

© 2
003
PAMPulse Amplitude Modulation
Definition: K = 1 dimension. Signals are equally spaced and symmetric about
the origin:
Performance:
0
dmin
s1 s8
si i Md
LNM
OQP( ) min2 1
2
PM
MQ
M
M Nsb
o
FHG
IKJ
2 1 6
12
2
( ) logE
c h
PM
M MQ
M
M Nb
b
o
FHGG
IKJJ
2 1 6
12
22
( )
log
logE
c h
Example: 8-PAM

© 2
003
MPSKM-ary Phase Shift Keying
Definition: K = 2 dimensions. Signals equally spaced along a circle of radius
Performance:
Es
si
s
s
i
Mi
M
FH IKFH IK
L
N
MMMM
O
Q
PPPP
E
E
cos( )
sin( )
2 1
2 1
Example: 8 PSK
P QM
N Msb
o
FHIKFHG
IKJ2
2 2E logsin
PM
QM
N Mbb
o
FHIKFHG
IKJ
2 2
2
2
log
logsin
E

© 2
003
QAMQuadrature Amplitude Modulation
Definition: K = 2 dimensions Points can be placed anywhere on the plane. Neighboring points are normally distance dmin apart. Constellation normally takes on a “box” or “cross” shape.
Performance: Depends on geometry. In general, when pi = 1/M:
Example: 16 QAM
PM
N Qd
NN Q
d
NN Q
d
Nso o o
FHG
IKJ
LNMM
OQPP
FHG
IKJ
LNMM
OQPP
FHG
IKJ
LNMM
OQPP
FHG
IKJ
12
23
24
22 3 4min min min
Number for points with 4 neighbors
Number for points with 3 neighbors
Number for points with 2 neighbors

© 2
003
QAM: Continued
Need to relate dmin to Es and Eb. Because QAM signals don’t have constant energy:
Solve the above to get dmin = f(Es) and plug into the expression for Ps.
Bit error probability is difficult to determine, because the exact mapping of bits to symbols must be taken into account.
E Es i ii
M
i ii
M
ii
M
p
p
M
1
2
1
2
1
1
s
s

© 2
003
Orthogonal Signaling
K=M dimensions. Signal space representation:
Example: 3-FSK
s1
0
0
L
N
MMMMM
O
Q
PPPPP
Es
s M
s
L
N
MMMM
O
Q
PPPP
0
0
E
s2
0
0
L
N
MMMM
O
Q
PPPPEs
Es
Es
Es

© 2
003
Performance of Orthogonal Signaling
Distances: The signal points are equally-distant:
Using the Union Bound:
Bit error probability
P M QN
M QM
N
ss
o
b
o
FHG
IKJ
FHG
IKJ
1
1 2
a f
a f
E
E log
P M QM
Nb
M
Mb
o
FHG
IKJ
2
2 11
2
2
12
(log )
(log )
loga f E
d i jij s 2E
see Eq. (5.2-24)for details

0 2 4 6 8 10 12 14 1610
-8
10-6
10-4
10-2
100
Eb/No in dB
BE
RPerformance Comparison:
FSK (Orthogonal) Performance gets better as M increases.
2-FSK
8-FSK
4-FSK
16-FSK
64-FSK32-FSK

© 2
003
Limits of FSK
As M , then Ps 0 provided that:
Although FSK is energy efficient, it is not bandwidth efficient (5.2-86):
BW efficiency can be improved by using: Biorthogonal signaling. Simplex signaling.
Eb
oN ln .2 1 59 dB
WKR KR
M
MR
Ms b b
2 2 22 2log log
Eq. (5.2-30)
Eq. (5.2-86)

© 2
003
Biorthogonal Signaling
K=M/2 dimensions M is even.
First M/2 signals are orthogonal: si(t) = fi(t) for 1 i M/2
Remaining M/2 signals are the negatives: si(t) = - fi-M/2(t) for M/2 + 1 i M
Since half-as many dimensions as orthogonal, the bandwidth requirement is halved:
WKR KR
M
MR
Ms b b
2 2 42 2log log
Es
Es

© 2
003
Example Biorthogonal Signal Set
Biorthogonal signal set for M=6.
Es
Es
Es Es
Es
Es

© 2
003
Performance of Biorthogonal Signals
Compute the distances:
Union Bound
Improved Union Bound
Performance of biorthogonal is actually slightly better than orthogonal.
d
i j
i jM
i j s
s
,
RS||T||
0
22
2
for
for
otherwise
E
E
P M QN
QNs
s
o
s
o
FHG
IKJ
FHG
IKJ2
2a f E E
P M QN
M QM
N
ss
o
b
o
FHG
IKJ
FHG
IKJ
2
2 2
a f
a f
E
E log

Simplex Signaling
Consider our 3-FSK example:» 3 points form a plane» All 3 points can be placed on a 2-dimensional
plot.» By changing coordinates, we can reduce the
number of dimensions from 3 to 2.
Make a new constellation.» 2 dimensional instead of 3.» The origin of the new constellation is the mean of
the old constellation.» The distances between signals are the same.
Es
Es
Es
dmin

© 2
003
Simplex Signaling
To create a simplex signal set: Start with an orthogonal signal set. Compute the centroid of the set:
Shift the signals so that they are centered about the centroid:
s s
L
N
MMMMM
O
Q
PPPPP p
M
M
i ii
M
s
s
E
E
s s si i'

© 2
003
Simplex Signaling
Compute a new set of basis functions.• The new set of signals has dimensionality K = M-1.• Therefore the bandwidth is
The average energy of the simplex constellation is now less than that of the original orthogonal set:
WKR KR
M
M R
Ms b b
2 2
1
22 2log
( )
log
E Es i s M' FH IKs s
21
1

© 2
003
Performance of Simplex Signals
The distances between signals remains the same as with orthogonal signaling.
Therefore, the symbol error probability is:
Where,
Therefore,
P M QNs
s
o
FHG
IKJ1a f E
E Es s M' FH IK1
1
P M QM
N M
M QM M
M N
ss
o
b
o
FHG
IKJ
FHG
IKJ
11
11
2
a f
a f
E
E
'
( )
log
( )
E Es s
M
M
FH IK'
1
But this is in terms of theold Es --- we want it in termsof the new one …

© 2
003
BPSK and QPSK
Categorize the following: BPSK
MPSK? QAM? Orthogonal? Biorthgonal? Simplex?
QPSK MPSK? QAM? Orthogonal? Biorthgonal? Simplex?