Embed Size (px)
Citation preview
1
NeoNet: Object centric training for image recognition
Daniel Fontijne, Koen E. A. van de Sande, Eren Gölge, R. Blythe Towal, Anthony Sarah, Cees G. M. SnoekQualcomm Technologies, Inc., December 17, 2015
Presented by:Daniel FontijneSenior Staff Engineer
2
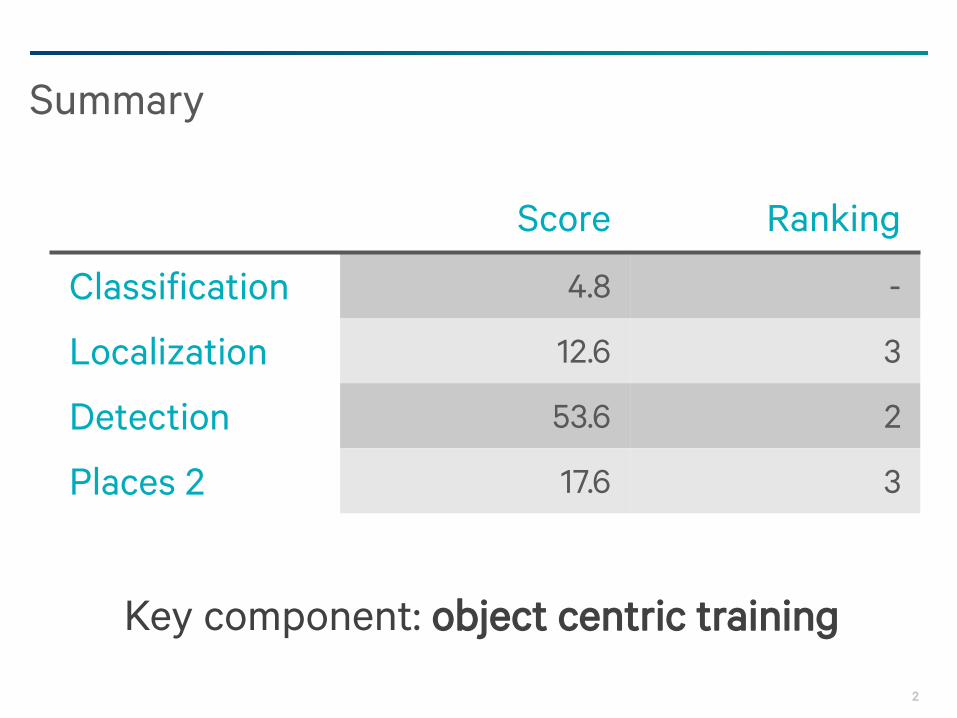
Summary
Key component: object centric training
Score Ranking
Classification 4.8 -
Localization 12.6 3
Detection 53.6 2
Places 2 17.6 3
3
Agenda
Foundation
1Classification
2Localization
3Detection
4Places 2
5

4
The base network for all our submissions is the inception network as introduced in the batch normalization paper by Ioffe & Szegedy.
Foundation: Batch-normalized inception
Ioffe & Szegedy ICML 2015
5
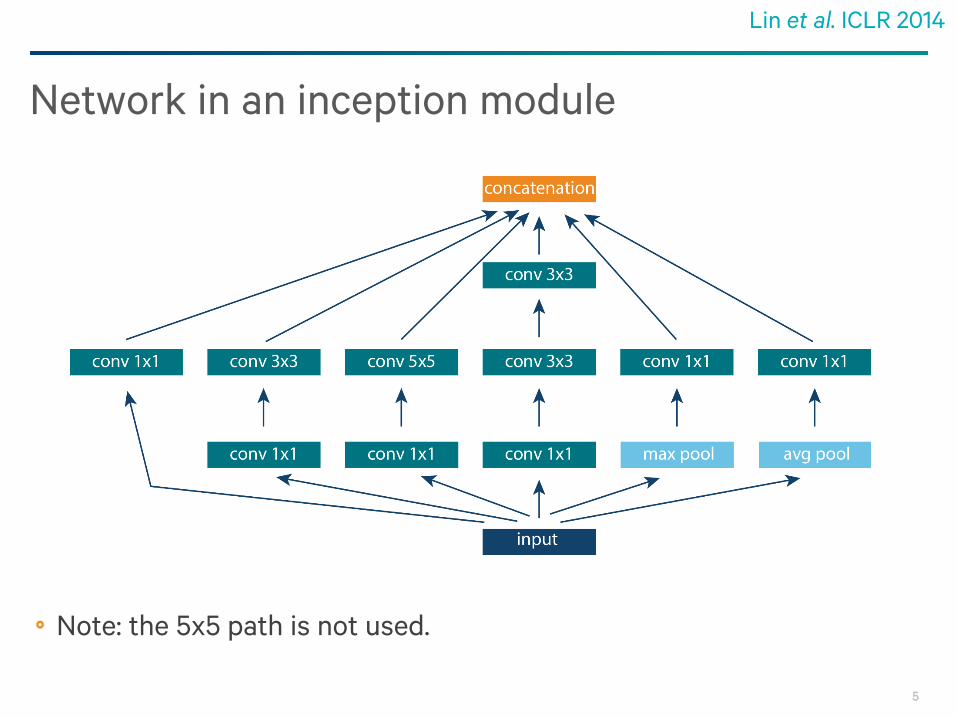
Network in an inception module
Note: the 5x5 path is not used.
Lin et al. ICLR 2014
6
Agenda
Foundation
1Classification
2Localization
3Detection
4Places 2
5
7
Ensemble of 12 networks
Train ‘really long’, 350 epochs.
Randomized RELU.
Test at 14 scales, 10 crops.
Object preserving crops.
Classification overview
Xu et al. ICML workshop 2015

8
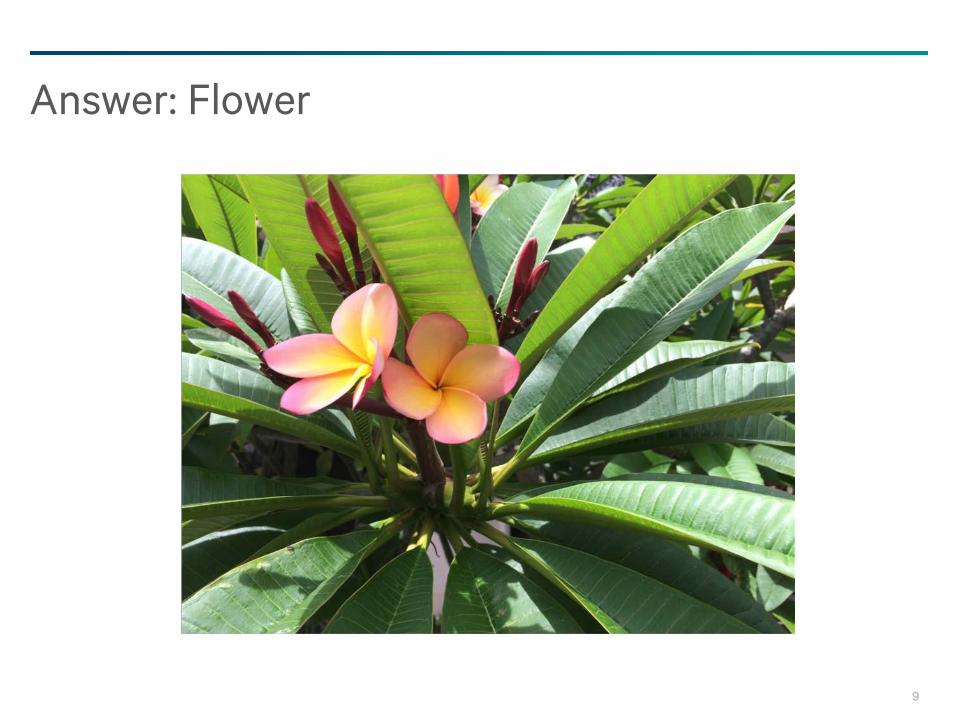
Quiz: What is this?
9
Answer: Flower
10
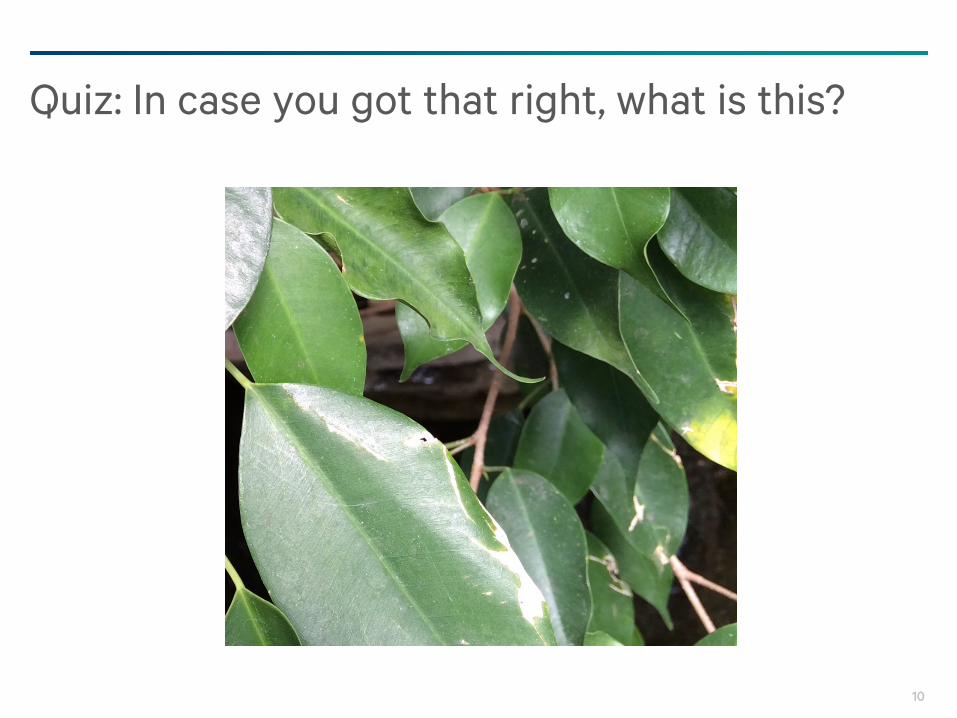
Quiz: In case you got that right, what is this?
11
Answer: Butterfly

12
Random crop selection might miss the object of interest.
Network tries to remember ‘butterfly’ when presented with leaves.
Solution: use provided boxes to assure crop contains the object.− For images without box annotation, use best box predicted by localization system.
Object preserving crops
X
13
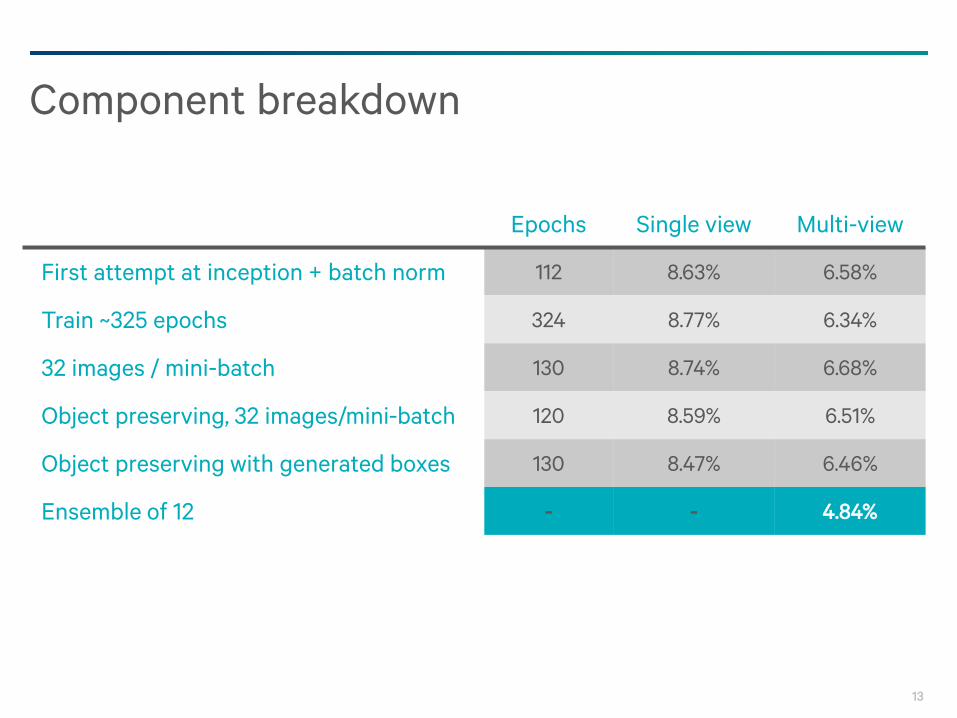
Epochs Single view Multi-view
First attempt at inception + batch norm 112 8.63% 6.58%
Train ~325 epochs 324 8.77% 6.34%
32 images / mini-batch 130 8.74% 6.68%
Object preserving, 32 images/mini-batch 120 8.59% 6.51%
Object preserving with generated boxes 130 8.47% 6.46%
Ensemble of 12 - - 4.84%
Component breakdown
14
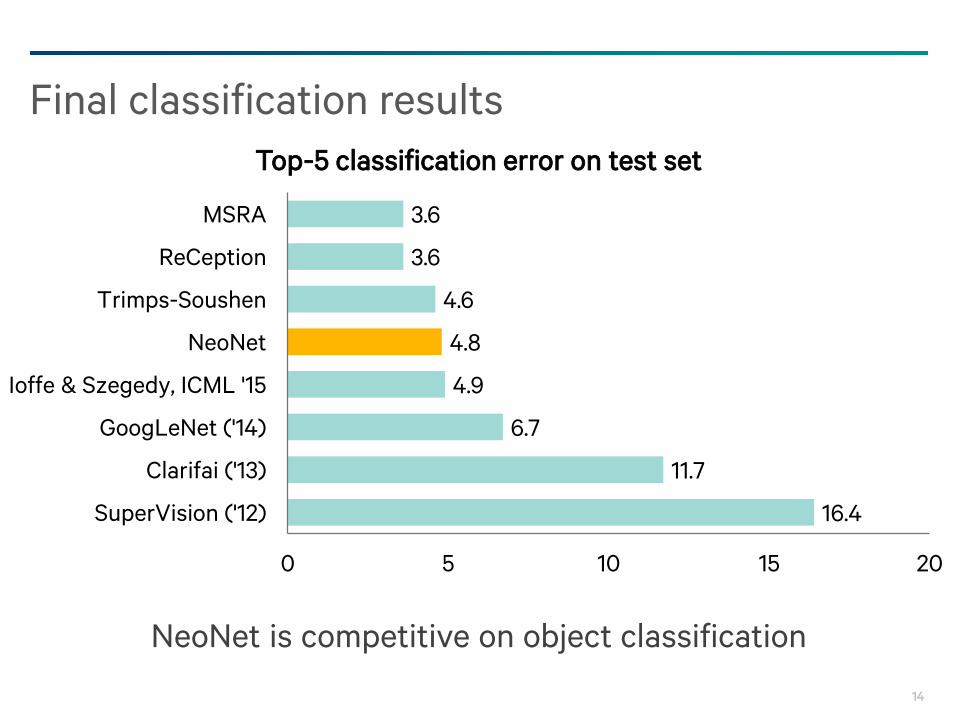
Final classification results
16.4
11.7
6.7
4.9
4.8
4.6
3.6
3.6
0 5 10 15 20
SuperVision ('12)
Clarifai ('13)
GoogLeNet ('14)
Ioffe & Szegedy, ICML '15
NeoNet
Trimps-Soushen
ReCeption
MSRA
Top-5 classification error on test set
NeoNet is competitive on object classification
15
Agenda
Foundation
1Classification
2Localization
3Detection
4Places 2
5
16
Foundations.− Generate box proposals using fast selective search.
− Train box-classification networks on crops.
Object centric training.− Object pre-training network.
− Object localization network.
− Object alignment network.
Localization overview
Girshik et al. PAMI 2016
Uijlings et al. IJCV 2013
17
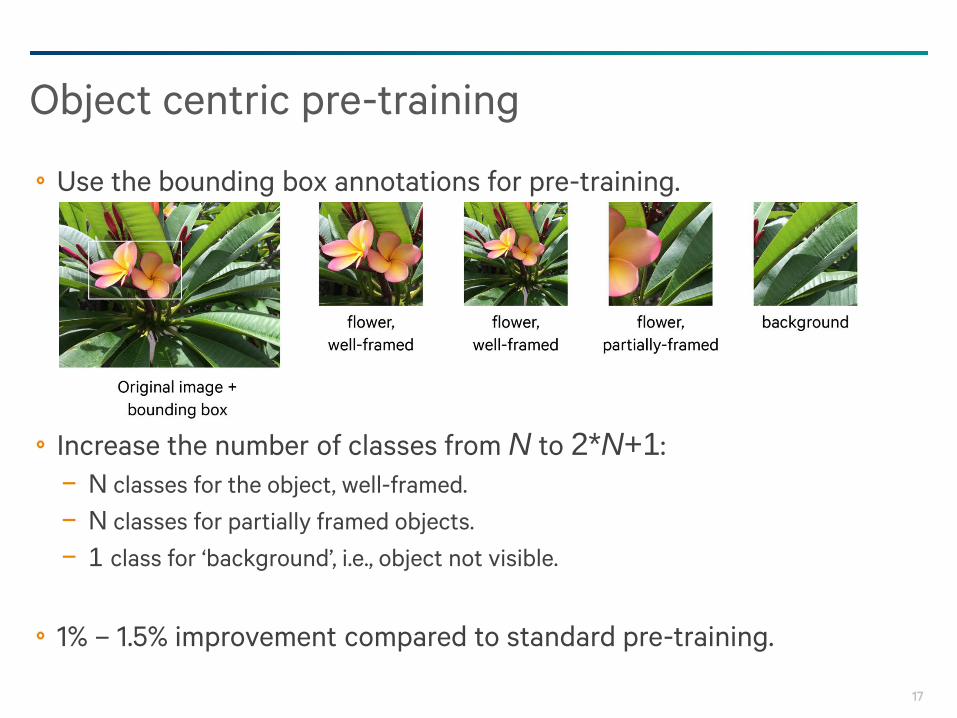
Use the bounding box annotations for pre-training.
Increase the number of classes from N to 2*N+1:− N classes for the object, well-framed.
− N classes for partially framed objects.
− 1 class for ‘background’, i.e., object not visible.
1% – 1.5% improvement compared to standard pre-training.
Object centric pre-training
18
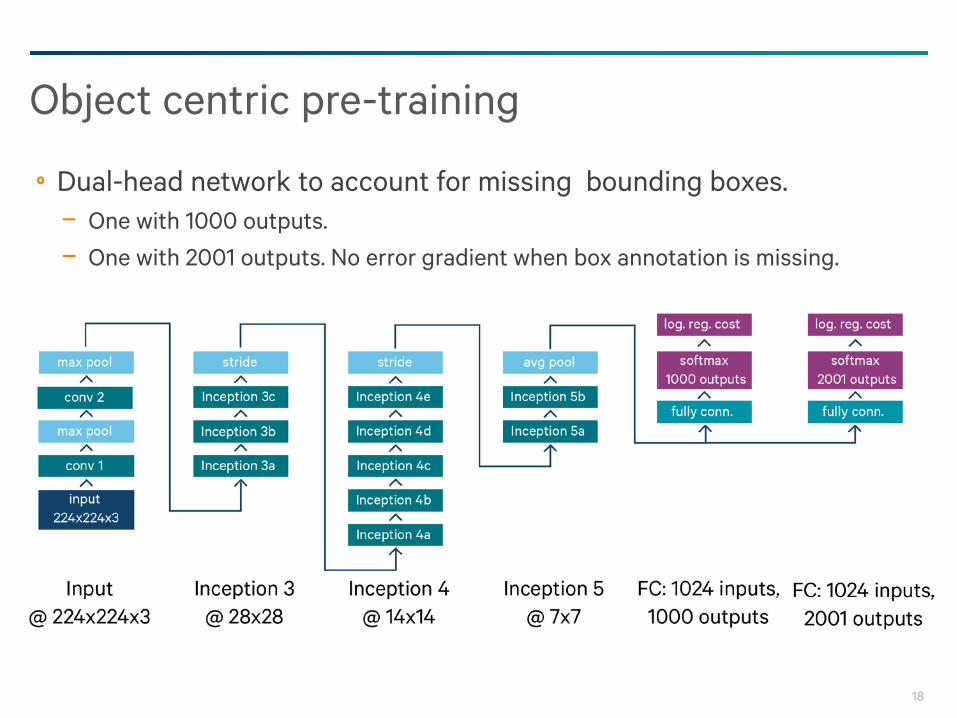
Dual-head network to account for missing bounding boxes. − One with 1000 outputs.
− One with 2001 outputs. No error gradient when box annotation is missing.
Object centric pre-training
19
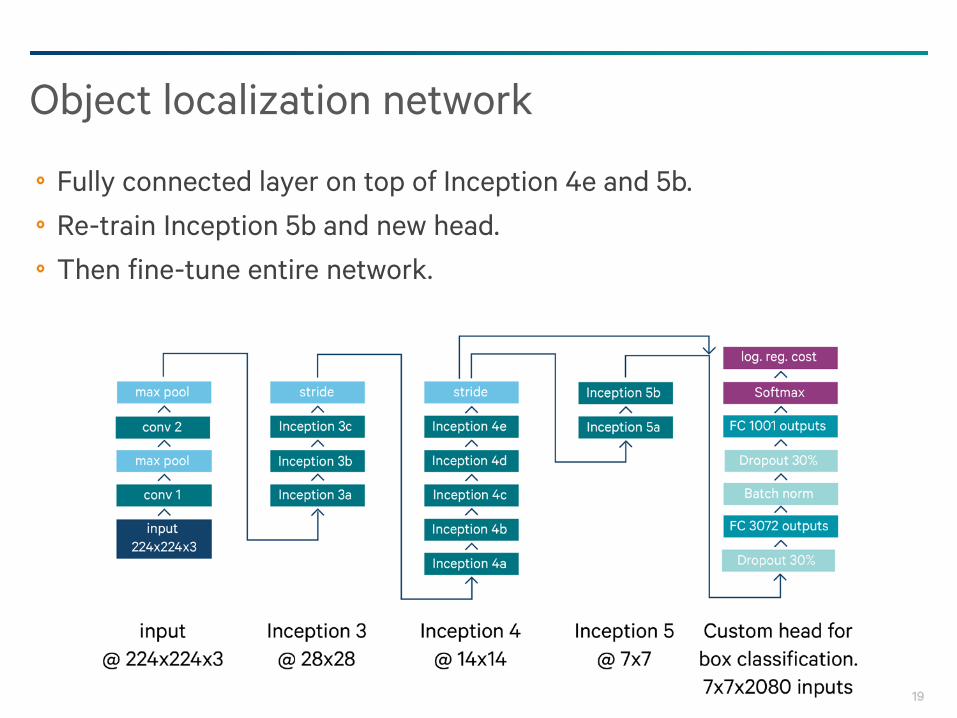
Fully connected layer on top of Inception 4e and 5b.
Re-train Inception 5b and new head.
Then fine-tune entire network.
Object localization network
20
Quiz: Is this an entire skyscraper?
21
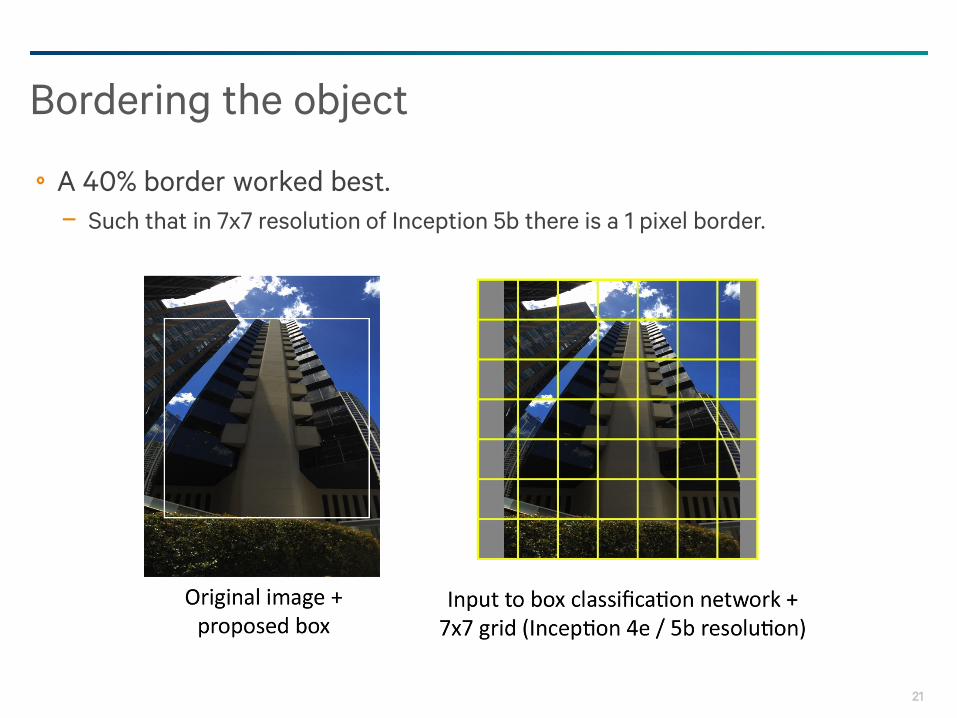
A 40% border worked best.− Such that in 7x7 resolution of Inception 5b there is a 1 pixel border.
Bordering the object
22
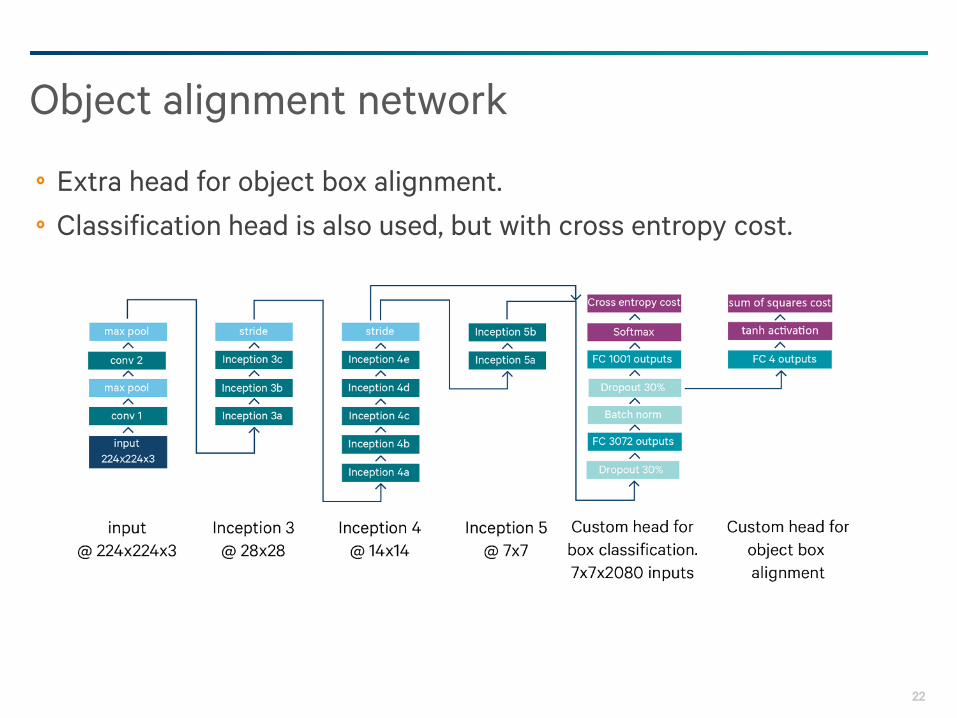
Extra head for object box alignment.
Classification head is also used, but with cross entropy cost.
Object alignment network
23
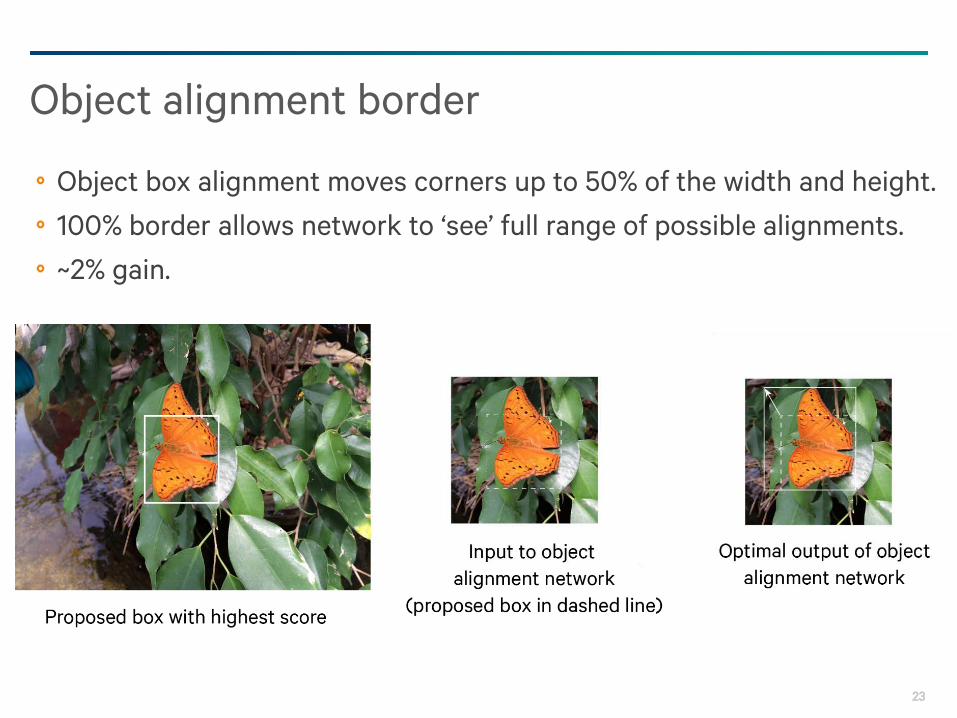
Object box alignment moves corners up to 50% of the width and height.
100% border allows network to ‘see’ full range of possible alignments.
~2% gain.
Object alignment border
24
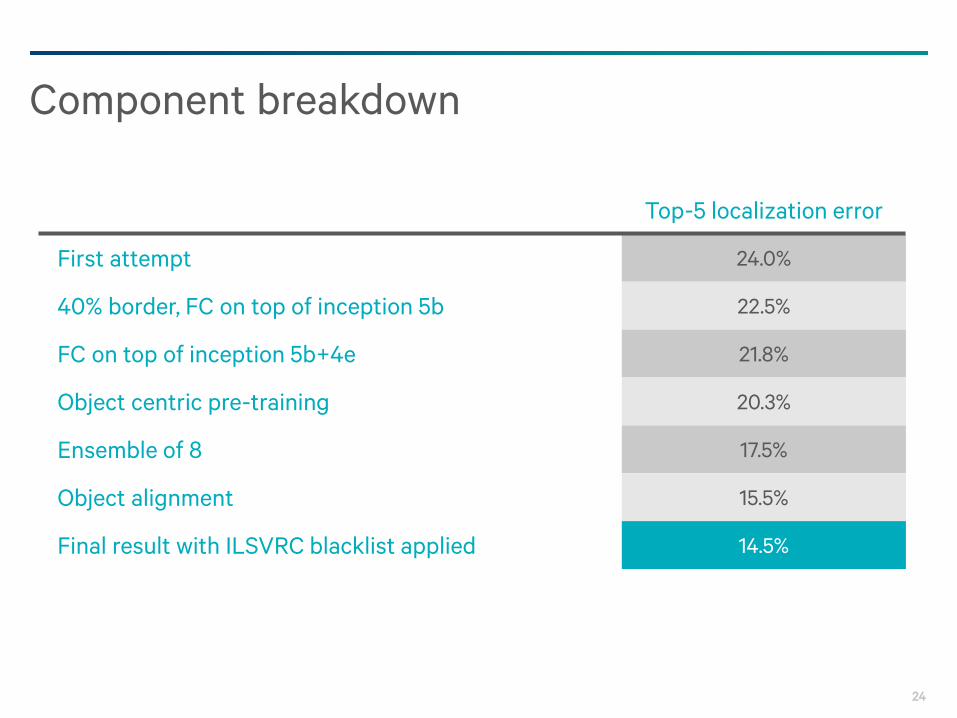
Component breakdown
Top-5 localization error
First attempt 24.0%
40% border, FC on top of inception 5b 22.5%
FC on top of inception 5b+4e 21.8%
Object centric pre-training 20.3%
Ensemble of 8 17.5%
Object alignment 15.5%
Final result with ILSVRC blacklist applied 14.5%
25
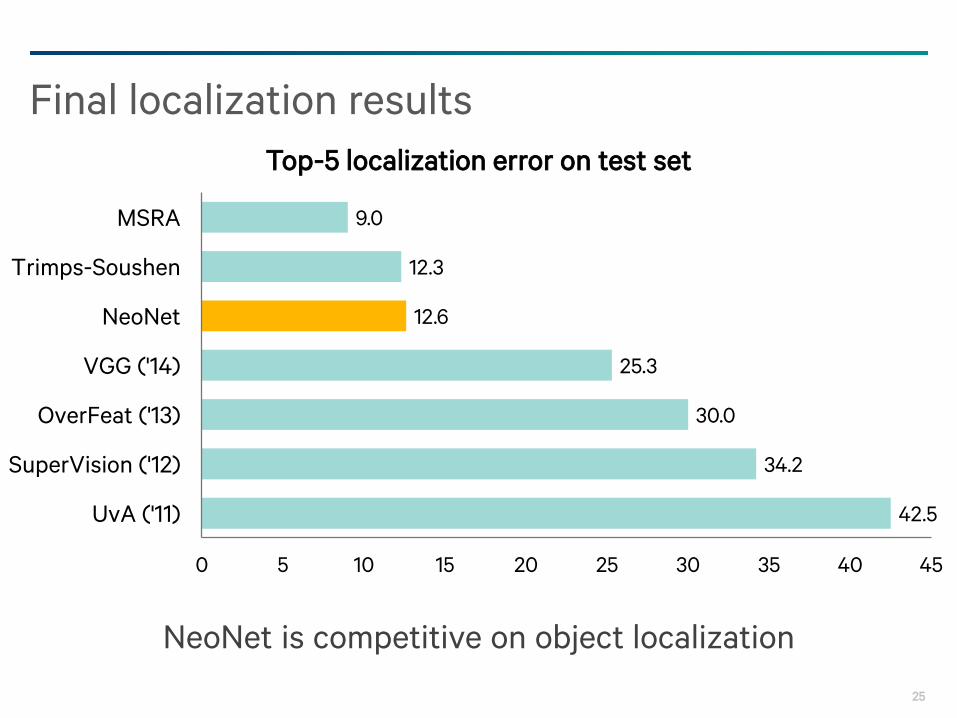
Final localization results
42.5
34.2
30.0
25.3
12.6
12.3
9.0
0 5 10 15 20 25 30 35 40 45
UvA ('11)
SuperVision ('12)
OverFeat ('13)
VGG ('14)
NeoNet
Trimps-Soushen
MSRA
Top-5 localization error on test set
NeoNet is competitive on object localization
26
Agenda
Foundation
1Classification
2Localization
3Detection
4Places 2
5
27
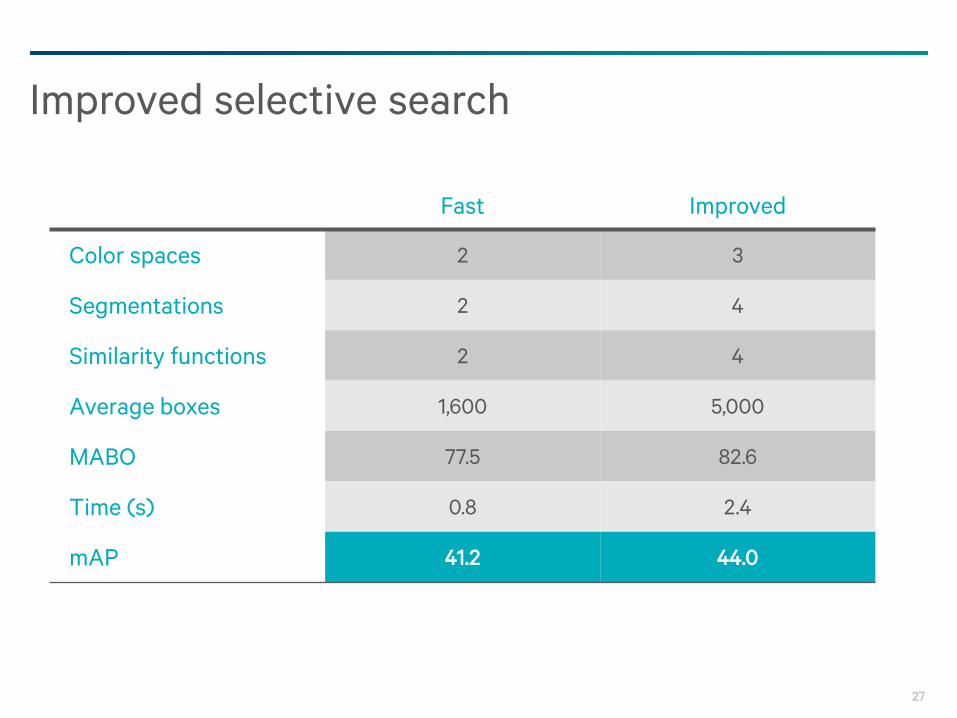
Improved selective search
Fast Improved
Color spaces 2 3
Segmentations 2 4
Similarity functions 2 4
Average boxes 1,600 5,000
MABO 77.5 82.6
Time (s) 0.8 2.4
mAP 41.2 44.0
28
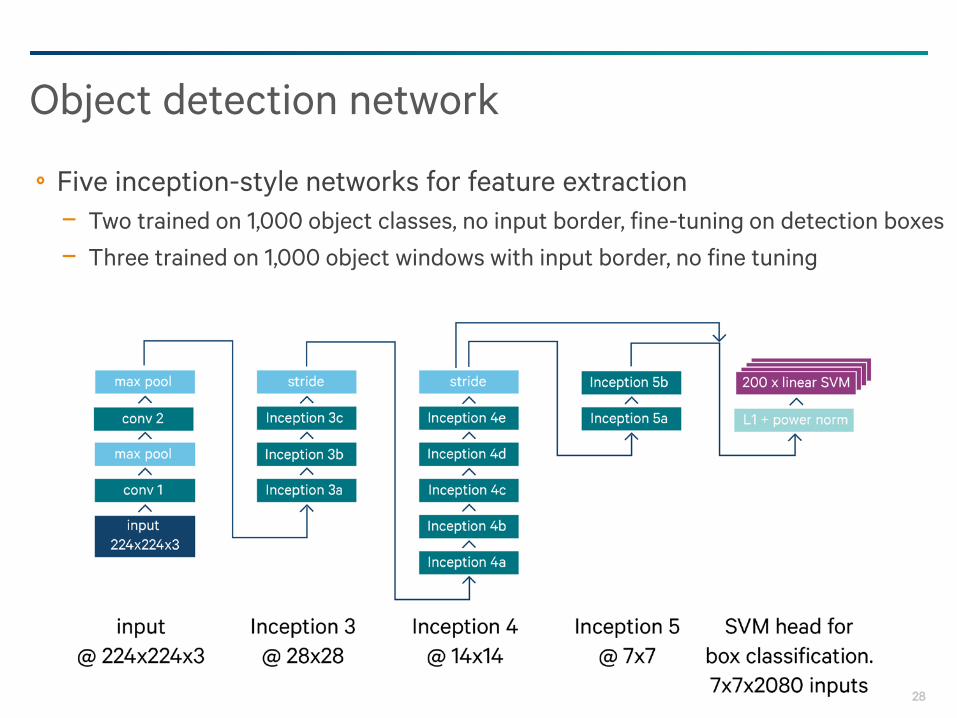
Five inception-style networks for feature extraction− Two trained on 1,000 object classes, no input border, fine-tuning on detection boxes
− Three trained on 1,000 object windows with input border, no fine tuning
Object detection network
29
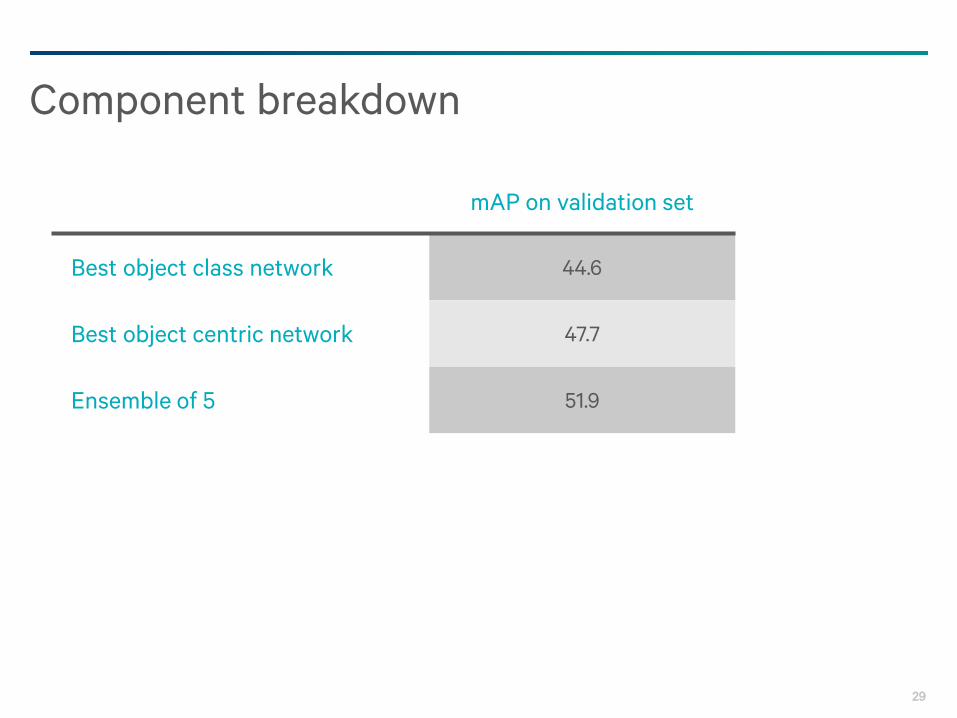
Component breakdown
mAP on validation set
Best object class network 44.6
Best object centric network 47.7
Ensemble of 5 51.9
30
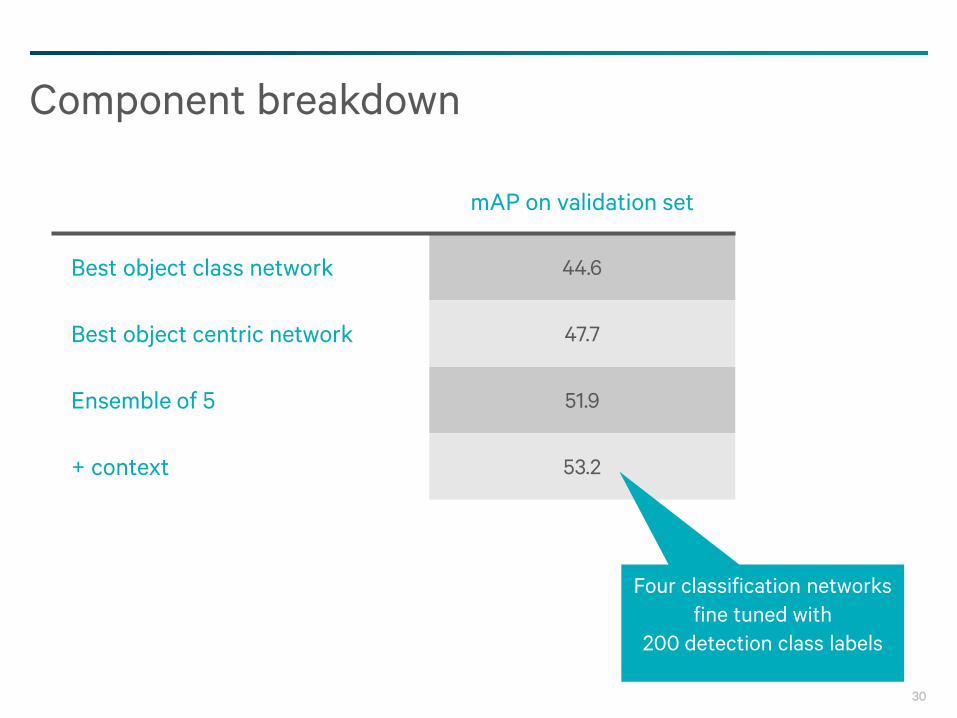
Component breakdown
mAP on validation set
Best object class network 44.6
Best object centric network 47.7
Ensemble of 5 51.9
+ context 53.2
Four classification networks fine tuned with
200 detection class labels
31
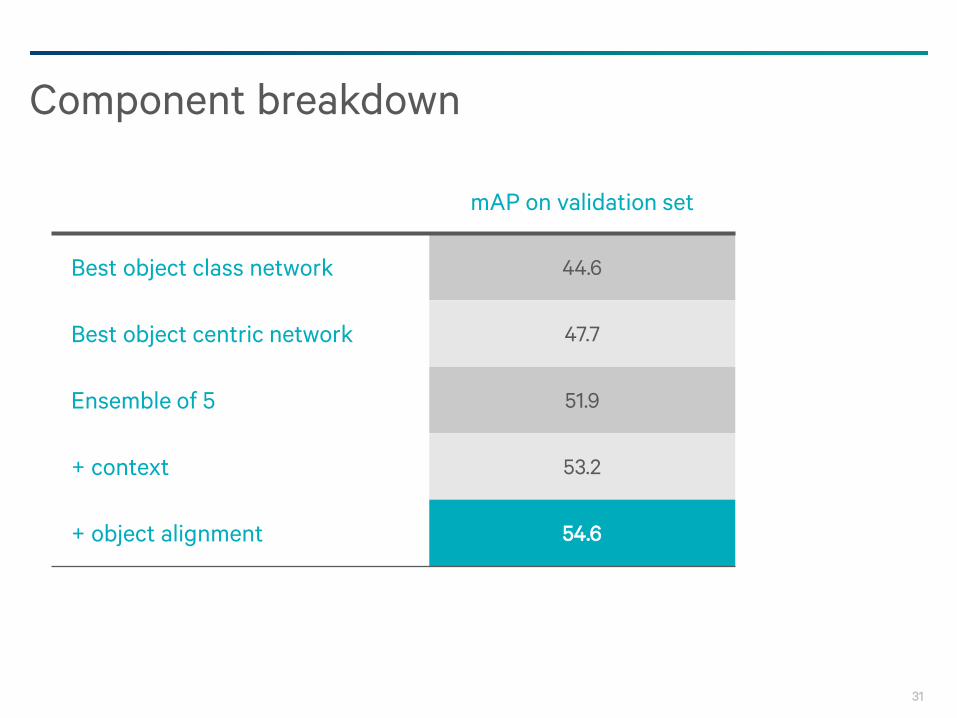
mAP on validation set
Best object class network 44.6
Best object centric network 47.7
Ensemble of 5 51.9
+ context 53.2
+ object alignment 54.6
Component breakdown
32
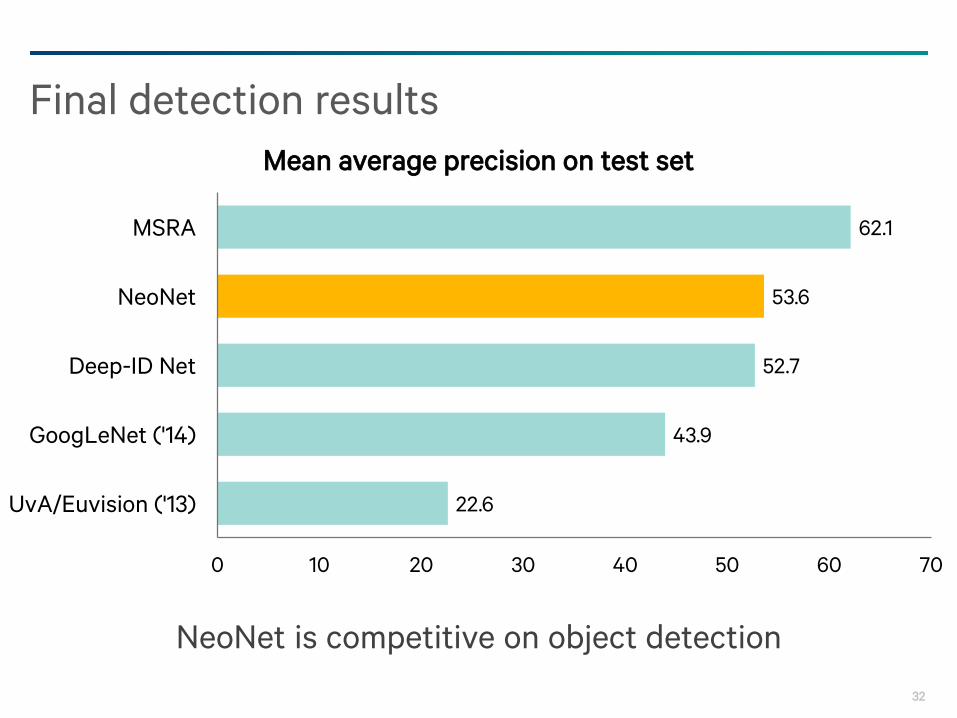
Final detection results
22.6
43.9
52.7
53.6
62.1
0 10 20 30 40 50 60 70
UvA/Euvision ('13)
GoogLeNet ('14)
Deep-ID Net
NeoNet
MSRA
Mean average precision on test set
NeoNet is competitive on object detection
33
Agenda
Foundation
1Classification
2Localization
3Detection
4Places 2
5
34
Our best submission: an ensemble of two inception nets. − Reduce fully connected layer from 1,000 to 401 outputs.
− Use pre-trained weights from ImageNet 1,000 (~325 epochs).
− Train Inception 5b and fully connected layer for two epochs.
− Fine-tune entire network for eight epochs.
Adding other networks reduced the accuracy
Places 2 overview
35
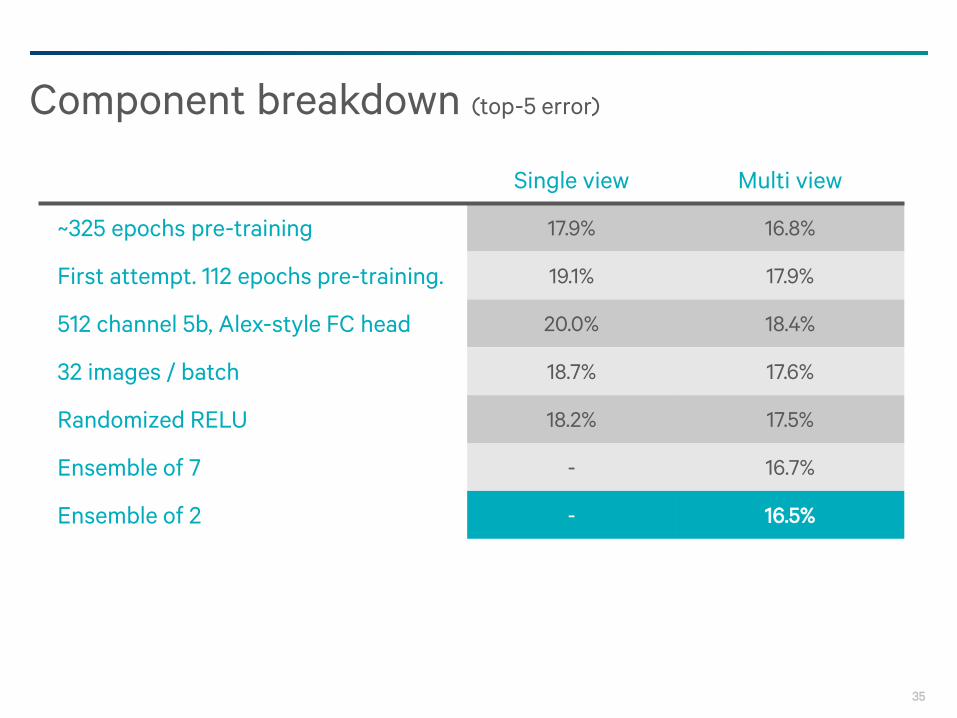
Component breakdown (top-5 error)
Single view Multi view
~325 epochs pre-training 17.9% 16.8%
First attempt. 112 epochs pre-training. 19.1% 17.9%
512 channel 5b, Alex-style FC head 20.0% 18.4%
32 images / batch 18.7% 17.6%
Randomized RELU 18.2% 17.5%
Ensemble of 7 - 16.7%
Ensemble of 2 - 16.5%
36
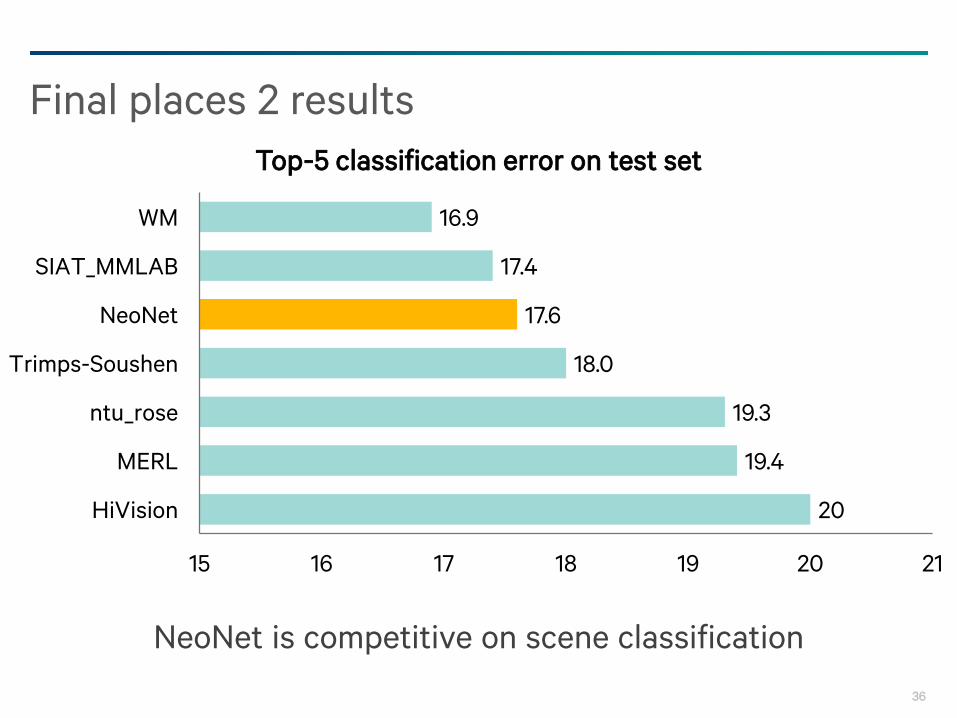
Final places 2 results
20
19.4
19.3
18.0
17.6
17.4
16.9
15 16 17 18 19 20 21
HiVision
MERL
ntu_rose
Trimps-Soushen
NeoNet
SIAT_MMLAB
WM
Top-5 classification error on test set
NeoNet is competitive on scene classification
37
On device recognition at 18 ms
38
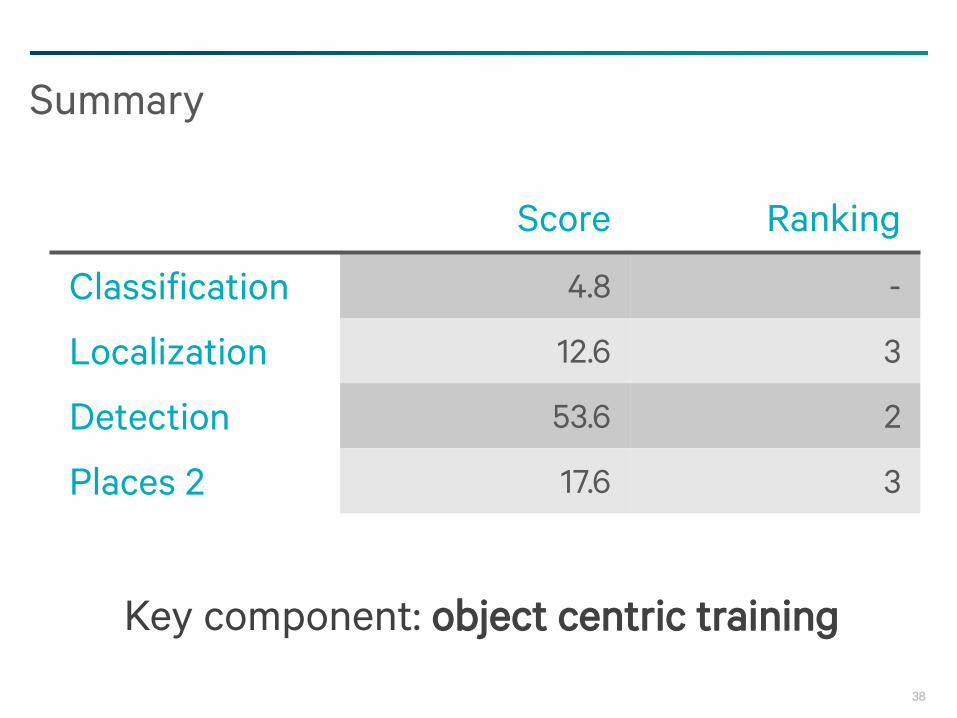
Summary
Key component: object centric training
Score Ranking
Classification 4.8 -
Localization 12.6 3
Detection 53.6 2
Places 2 17.6 3

39
Nothing in these materials is an offer to sell any of the components or devices referenced herein.
©2013-2015 Qualcomm Technologies, Inc. and/or its affiliated companies. All Rights Reserved.Qualcomm and Snapdragon are trademarks of Qualcomm Incorporated, registered in the United States and other countries. Zeroth is a trademark of Qualcomm Incorporated. Other products and brand names may be trademarks or registered trademarks of their respective owners.
References in this presentation to “Qualcomm” may mean Qualcomm Incorporated, Qualcomm Technologies, Inc., and/or other subsidiaries or business units within the Qualcomm corporate structure, as applicable.
Qualcomm Incorporated includes Qualcomm’s licensing business, QTL, and the vast majority of its patent portfolio. Qualcomm Technologies, Inc., a wholly-owned subsidiary of Qualcomm Incorporated, operates, along with its subsidiaries, substantially all of Qualcomm’s engineering, research and development functions, and substantially all of its product and services businesses, including its semiconductor business, QCT.
For more information on Qualcomm, visit us at: www.qualcomm.com & www.qualcomm.com/blog
Thank youFollow us on:



























![OrganicFormsThroughTwistsandBoostslinear interpolation of bivectors discussed by L. Dorst, L. Mann, and D. Fontijne in their textbook [6], and expands the notion of a twist lattice](https://img.pdfslide.us/doc/110x75/5f03971c7e708231d409cda1/organicformsthrou-linear-interpolation-of-bivectors-discussed-by-l-dorst-l-mann.jpg)