Embed Size (px)
Citation preview
M. Campbell
Curriculum Vitae for Mark Campbell
PROFESSOR MARK E. CAMPBELL ...................................................................................................... 2 EDUCATION ............................................................................................................................................... 2 ACADEMIC APPOINTMENTS .................................................................................................................... 2 INDUSTRIAL EXPERIENCE ....................................................................................................................... 3 PUBLICATIONS .......................................................................................................................................... 3
Books, Book Chapters ........................................................................................................................ 3 Refereed Journal Papers (including in press, accepted and to appear) .............................................. 3 Refereed Conference Papers .............................................................................................................. 6
INVITED LECTURES AND SEMINARS ..................................................................................................... 12 CONFERENCE PRESENTATIONS ............................................................................................................. 15 SELECTED HONORS AND AWARDS ........................................................................................................ 17 STUDENT AWARDS ................................................................................................................................. 19 COURSES TAUGHT .................................................................................................................................. 20
Cornell University ............................................................................................................................ 20 University of Washington ................................................................................................................ 20 Massachusetts Institute of Technology ............................................................................................ 20
ADVISING OF STAFF AND STUDENTS ..................................................................................................... 21 Current Research Staff ..................................................................................................................... 21 Current Technical Staff .................................................................................................................... 21 Current Advised PhD Students ........................................................................................................ 21 Past Research Staff ........................................................................................................................... 21 Past Technical Staff .......................................................................................................................... 22 Past Advised Students Awarded with PhD Degrees ........................................................................ 22 Past Advised Students Awarded with MS Degrees ......................................................................... 23 Serving on PhD (and MS) Committees ............................................................................................ 24 MEng Projects and Students: ........................................................................................................... 26 Undergraduate Projects and Students: ............................................................................................. 27
May 2013
M. Campbell 2
PROFESSOR MARK E. CAMPBELL Cornell University Sibley School of Mechanical and Aerospace Engineering 208 Upson Hall Ithaca NY 14853 Email: [email protected] Phone: (607)255-4268 Fax: (607)255-1222 http://www.mae.cornell.edu/campbell
EDUCATION Ph.D. Massachusetts Institute of Technology
Area: Control and Estimation Advisor: Prof. Edward Crawley Thesis Title: Uncertainty Modeling for Structural Control Analysis and Synthesis
Jan 1996
M.S. Massachusetts Institute of Technology Aeronautics and Astronautics Department Advisor: Prof. Edward Crawley Thesis Title: Neo-Classical Control of Structures
Jan 1993
B.S. Carnegie-Mellon University Mechanical Engineering Department
May 1990
ACADEMIC APPOINTMENTS S. C. Thomas Sze Director Professor Associate Professor Associate Director for Graduate Studies Assistant Professor Cornell University Sibley School of Mechanical and Aerospace Engineering
July 2011-present July 2011-present
July 2004-June 2011 July 2007-Dec 2009
Aug 2001-June 2004
Australian Research Council International Fellow University of Sydney Australian Centre for Field Robotics
Jan 2006-July 2006
Assistant Professor Univ. of Washington Dept. of Aeronautics and Astronautics (Adjunct Assistant Professor, Dept. of Electrical Engineering)
Aug 1997-Aug 2001
Research Associate and Lecturer Massachusetts Institute of Technology Dept. of Aeronautics and Astronautics
Jan 1996-Aug 1997
Research Assistant Massachusetts Institute of Technology Space Engineering Research Center Dept. of Aeronautics and Astronautics
Aug 1990- Jan 1996
M. Campbell 3
INDUSTRIAL EXPERIENCE Visiting Research Scientist The Insitu Group
July 2005-Dec 2005
Project Engineer Lockheed Missiles & Space Company Space Systems Division
1991,1992
Engineer Lawrence Livermore National Laboratory W89 Warhead Group
1990
Product Engineer General Motors Corporation Fisher Guide Division
1988,1989
PUBLICATIONS
Books, Book Chapters 1. Doyle, B., Patel, A., Brauneis, T., Cohan, L., Lee, J.-W., Campbell, M., “Cubesats for GPS Scintilla-
tion Science,” AIAA Progress Series: Emergence of Pico- and Nanosatellites for Atmospheric Research and Technology Testing, edited by P. Thakker and W. A. Shiroma, AIAA Press, 2010.
2. Crawley, E. Campbell, M., High Performance Structures: Dynamics and Control, published on-line in 2001.
3. Campbell, M., E. Scholte, S. Brunke, “Active Model Estimation for Complex Autonomous Systems”, Software-Enabled Control: Information Technology for Dynamical Systems, Samad and Balas Eds., IEEE Press, Wiley, April 2003.
4. Miller, D. W., Crawley, E. F., How, J. P., Liu, K., Campbell, M. E., Grocott, S. C. O., Glaese, R. M., and Tuttle, T. D., “The Middeck Active Control Experiment (MACE): Summary Report,” MIT SERC #7-96, MIT Space Engineering Research Center, Cambridge, MA, June 1996.
5. Campbell, M. E., “Uncertainty Modeling for Structural Control Analysis and Synthesis,” Ph.D. thesis, Department of Aeronautics and Astronautics, MIT, MIT SERC #2-96, MIT Space Engineering Research Center, Cambridge, MA, Jan. 1996.
6. Campbell, M. E., “Neo-Classical Control of Structures,” M.S. thesis, Department of Aeronautics and Astronautics, MIT, MIT SERC report # 4-92, MIT Space Engineering Research Center, Cambridge, MA, Feb. 1993.
Refereed Journal Papers (including in press, accepted and to appear) 1. D. Shah, M. Campbell, “A Qualitative Path Planner for Robot Navigation Using Human-Provided
Maps,” accepted and to appear, International Journal of Robotics Research, 2013. 2. N. Ahmed, E. Sample, and M. Campbell, “Bayesian Multicategorical Soft Data Fusion for Human--
Robot Collaboration,” IEEE Transactions on Robotics. Vol 29, No 1, pp 189-206, 2013. 3. W. Whitacre, M. Campbell, “Information-Theoretic Optimization of Periodic Orbits for Persistent
Cooperative Geolocation,’ AIAA Journal of Guidance, Control, and Dynamics, to appear, 2013. 4. W. Whitacre, M. Campbell, “Cooperative Estimation using Mobile Sensor Nodes in the Presence of
Communication Loss,” AIAA Journal of Aerospace Computing, Information, and Communication, Vol 10, No. 3, pp 114-130, March 2013.
5. N. Ahmed and M. Campbell, “Fast Consistent Chernoff Fusion of Gaussian Mixtures for Ad Hoc Sensor Networks,” IEEE Transactions on Signal Processing, Vol 60, No 12, Dec 2012, pp 6739-6745.
M. Campbell 4
6. M. McClelland and M. Campbell, “Probabilistic Modeling of Anticipation in Human Controllers,” IEEE Transactions on Systems Man & Cybernetics, Systems, published on-line in 2013.
7. N. Ahmed, M. Campbell, “On Estimating Simple Probabilistic Discriminative Models with Subclasses,” Expert Systems With Applications, Vol 39, No 7, June 2012, pp 6659–6664.
8. D. C. Shah, J. R. Schneider, M. E. Campbell, “Robust, Sketch based Command and Control of Robot Teams,” Proceedings of the IEEE, Vol 100, No. 3, March 2012, pp 604-622.
9. J. Schoenberg, M. Campbell, I. Miller, “Posterior Representation with a Multi-Modal Likelihood Using the Gaussian Sum Filter,” Journal of Field Robotics, Vol 29, No 2, Mar-Apr 2012, pp 240-257.
10. I. Miller, M. Campbell, D. Huttenlocher, “Map-aided localization in sparse global positioning system environments using vision and particle filtering,” Journal of Field Robotics, Vol 28, No 5, Sept-Oct 2011, pp 619-643.
11. N. Ahmed and M. Campbell, “Variational Bayesian Learning of Probabilistic Discriminative Models with Latent Softmax Variables,” IEEE Transactions on Signal Processing, Vol 59, No 7, July 2011, pp 3143-3154.
12. P. Otanez, M. Campbell, “Detection Methods for Mode Perturbation Signatures,” IEEE Transactions in Automatic Control, Vol 57. No 11, Nov 2012, pp 2923-2928.
13. C. Rivadeneyra, M. Campbell, “Probabilistic Multi-Level Maps from LIDAR Data,” International Journal of Robotics Research, Vol. 30 No. 12, Oct 2011, pp 1508-1526.
14. M. Campbell, “Intelligent Autonomy in Robotic Systems,” The Bridge, Quarterly of the National Academy of Engineering, Winter 2010-11, pp 27-34.
15. W. Whitacre, M. Campbell, “Decentralized Geolocation and Sensor Bias Estimation for UAVs with Articulating Cameras,” AIAA Journal of Guidance, Controls, and Dynamics, Vol 34, No 2, Mar-Apr 2011, pp 564-573.
16. I. Miller, M. Campbell, “Probabilistic Validation of Simplified Models of Spacecraft Formations near Libration Points”, IEEE Transactions on Aerospace and Electronic Systems, Vol 47, No 4, Oct 2011, pp 2779-2791.
17. I. Miller, M. Campbell, “Sensitivity Analysis of a Tightly-Coupled GPS / INS System for Autonomous Navigation,” IEEE Transactions on Aerospace and Electronic Systems, Vol 48, No 2, April 2012, pp 1115-1135.
18. I. Miller, M. Campbell, D. Huttenlocher, “Efficient Unbiased Tracking of Multiple Dynamic Obstacles Under Large Viewpoint Changes,” IEEE Transactions on Robotics, Vol 27, No 1, Feb 2011, pp 29-46.
19. M. Campbell, M. Egerstedt, J. How, R. Murray, “Autonomous Driving in Urban Environments: Approaches, Lessons and Challenges,” Philosophical Transactions of the Royal Society - A, Vol 368, 2010, pp. 4649-4672
20. M. Campbell, M. Wheeler, “A Vision Based Geolocation Tracking System for UAV’s,” AIAA Journal of Guidance, Controls, and Dynamics, Vol. 33, No. 2, 2010, pp. 521–532.
21. D. Zanon, M. Campbell, “Formation Optimal Maneuvers under Inertial Attitude Dynamics,” AIAA Journal of Spacecraft and Rockets, Vol. 47, No. 2, 2010, pp. 295–307.
22. T. McLoughlin, M. Campbell, “Solutions to Periodic Sensor Scheduling Problems for Formation Flying Missions in Deep Space”, IEEE Transactions on Aerospace and Electronic Systems, Vol 47, No 2, April 2011, pp 1351-1368.
23. I. Miller, M. Campbell, D. Huttenlocher, et al, “Team Cornell's Skynet: Robust Perception and Planning in an Urban Environment,” Journal of Field Robotics, Vol 25, No 8, pp 493-527, 2008.
24. L. Fletcher, I. Miller, S. Teller, M. Campbell, J. Leonard, D. Huttenlocher, et al, “The Cornell - MIT Collision and why it happened,” Journal of Field Robotics, Vol 25, No 8, pp 775-807, 2008.
25. E. Scholte, M. Campbell, “Robust Nonlinear Model Predictive Control with Partial State Information,” IEEE Transactions on Control System Technology, Volume 16, No. 3, 2008.
26. M. Campbell, J. W. Lee, E. Scholte, D. Rathbun, “Flight Results for On-line Estimation, Planning and Control using the SeaScan UAV,” AIAA Journal of Guidance, Controls, and Dynamics, Vol 30, No 6, 2007, pp. 1597-1609.
M. Campbell 5
27. M. Campbell, W. Whitacre, “Cooperative Tracking using Vision Measurements on SeaScan UAV's,” IEEE Transactions on Control System Technology, Vol. 15, No. 4, July 2007, pp. 613-626.
28. T. McLoughlin, M. Campbell, “Scalable Sensing, Estimation and Control Architecture Large Spacecraft Formations”, AIAA Journal of Guidance, Control, and Dynamics, Vol. 30, No. 2, Mar-Apr 2007, pp. 289-300.
29. J. Ousingsawat, M. Campbell, “Planning for Cooperative Multi-vehicle Reconnaissance,” AIAA Journal of Aerospace Computing, Information, and Communication, Vol. 4, No. 1, Mar-Apr 2007.
30. J. Ousingsawat, M. Campbell, “Optimal Planning for Cooperative Reconnaissance Using Multiple Vehicles,” AIAA Journal of Guidance, Control, and Dynamics, Vol. 30, No. 1, Jan-Feb 2007, pp. 122-132.
31. M. Campbell, “Discussion on A Stacked Model Structure for Off-line Parameter Estimation in Multi-Equilibrium Nonlinear Systems,” European Journal of Control, Vol. 12, No. 6, Nov-Dec 2006, pp. 365-372.
32. I. Miller, E. Garcia, M. Campbell, “To Drive is Human”, IEEE Computer Magazine, Dec 2006, pp. 36-40.
33. I. Miller, M. Campbell, “A Mixture-Model Based Algorithm for Real-Time Terrain Estimation,” Journal of Field Robotics, Volume 23, Issue 9, Sept 2006, pp. 755-775.
34. P. Otanez, M. Campbell, “Bounded Estimator Switching in Uncertain Hybrid Systems,” IEEE Transactions on Control Systems Technology, Vol. 15, No. 2, March 2007, pp. 358-368.
35. J. Kulkarni, M. Campbell, G. Dullerud, “Stabilization Spacecraft Flight in Halo Orbits: An H-inf Approach,” IEEE Transactions on Control Systems Technology, Vol. 14, No. 3, May 2006, pp. 572-578
36. Zanon, D., Campbell, M., “Optimal Planner for Spacecraft Formations in Elliptical Orbits,” AIAA Journal of Guidance, Control, and Dynamics, Vol. 29, No. 1, 2006, pp. 161-171.
37. C. D. Rayburn, M. E. Campbell A. T. Mattick, “Pulsed Plasma Thruster for Microsatellites,” AIAA Journal of Spacecraft and Rockets, Vol. 42, No. 1, Jan-Feb 2005.
38. Campbell, M., “Collision Monitoring and Avoidance in Satellite Clusters,” IEEE Transactions on Control System Technology, Vol. 13, No. 1, Jan. 2005, pp. 42-55.
39. S. Brunke and M. Campbell, “Square Root Sigma Point Filtering for Aerodynamic Model Estimation,” AIAA Journal of Guidance, Control, and Dynamics, Vol. 27, No. 2, Mar-Apr, 2004, pp. 314-317.
40. J. Ousingsawat and M. Campbell, “On-line Estimation and Path Planning for Multiple Vehicles in an Uncertain Environment,” International Journal of Nonlinear and Robust Control, Vol. 14, No. 8, May 2004, pp. 741-766
41. Scholte, E., Campbell, M., “A Nonlinear Set-Membership Filter for On-line Applications,” International Journal of Nonlinear and Robust Control, Vol. 13, No. 15, Dec 2003, pp. 1337-1358. On-line Oct 2003 at www3.interscience.wiley.com.
42. Campbell, M., “Planning Algorithm for Multiple Satellite Clusters,” AIAA Journal of Guidance, Control, and Dynamics, Vol. 26, No. 5, Sept-Oct 2003, pp. 770-780.
43. Schetter. T., Campbell, M., Surka, D., “Multiple Agent Based Autonomy for Satellite Constellations,” Journal of Artificial Intelligence, Vol. 145, No. 1-2, April 2003, pp. 147-180.
44. Hauge, G., Campbell, M., “Shaping the Transmissibility for Six-Axis Active Vibration Isolators,” Journal of Sound and Vibration, Vol. 269, 22 Jan 2004, pages 913-931. On-line May 2003 at www.sciencedirect.com.
45. Campbell, M., Schetter. T. “Comparison of Multi-Agent Based Organizations for Satellite Constellations,” AIAA Journal of Spacecraft and Rockets, Vol 39, No. 2, March-April 2002, pp. 274-283.
46. Thayer, D., Campbell, M., Vagners, J., von Flotow, A., “A Unique Six-axis Active Isolation System for Spacecraft,” AIAA Journal of Spacecraft and Rockets, Vol 39, No. 2, March-April 2002, pp. 206-212.
47. Campbell, M., “Oh Now I get It!,” Journal of Engineering Education, Vol 88, No. 4, Oct 1999.
M. Campbell 6
48. Campbell, M. J. How, S. Grocott, D. Miller, “On-Orbit Closed Loop Results for MACE,” Journal of Guidance, Control, and Dynamics, Vol. 22, No. 2, March-April, 1999.
49. Campbell, M. E. and Grocott, S. C. O., “Parametric Uncertainty Model for Control Design and Analysis,” IEEE Transactions on Control Systems Technology, Vol 7, No 1, Jan 1999, Pages 85-96.
50. Miller, D. W., J. P. How, M. E. Campbell, S. C.O. Grocott, K. Liu, R. M. Glaese, T. Tuttle, “Flight Results from the Middeck Active Control Experiment,” AIAA Journal, March, 1998, pp 432-440.
51. Campbell, M. E. and Crawley, E. F., “Classically Rationalized Low Order Robust Controllers” Journal of Guidance, Control, and Dynamics, Vol. 21, No. 2, March-April 1998, Pages 296-306.
52. Campbell, M. E. and Crawley, E. F., “Development of Structural Uncertainty Models” Journal of Guidance, Control, and Dynamics, Vol. 20, No. 5, September-October 1997, Pages 841-849.
53. Campbell, M. E. and Crawley, E. F., “Asymptotic Linear Quadratic Control for Lightly Damped Structures,” Journal of Guidance, Control, and Dynamics, Vol. 19, No. 4, July-August 1996, Pages 969-971.
Refereed Conference Papers 1. M. Campbell, T. Estlin, M. McClelland, “Qualitative Relational Mapping for Planetary Rover
Exploration,” AIAA Guidance, Navigation and Control Conference, 2013. 2. K. Wyffels, M. Campbell, “Modeling and Fusing Negative Information For Dynamic Extended
Multi-object Tracking,” International Conference on Robotics and Automation, 2013. 3. N. Ahmed, T.-L. Yang, E. Sample, M. Campbell, “Bayesian Sketch and Share: Enhanced Information
Fusion for Large Scale Mixed Robot-Human Search Teams,” International Symposium on Distributed Autonomous Robotic Systems, 2012. [Best Poster Award]
4. R. Tse, N. Ahmed, M. Campbell, “Unified Mixture-Model Based Terrain Estimation with Markov Random Fields,” IEEE International Conference on Multisensor Fusion and Integration, 2012.
5. D. Lee, M. Campbell, “Iterative Smoothing Approach using Gaussian Mixture Models for Nonlinear Estimation,” IEEE/RSJ International Conference on Intelligent Robots and Systems, Sept 2012.
6. E. Sample, N. Ahmed, M. Campbell, “An Experimental Evaluation of Bayesian Soft Human Sensor Fusion in Robotic Systems,” 2012 AIAA Guidance, Navigation and Control Conference.
7. M. McClelland, T. Estlin, M. Campbell, “Hybrid Relational Mapping for Autonomous Robotics,” AIAA Infotech Conference, 2012.
8. N. Ahmed, J. Schoenberg, M. Campbell, “Fast Weighted Exponential Product Rules for Robust General Multi-Robot Data Fusion,” Robotics Science and Systems Conference, 2012.
9. B. Johnson. F. Havlak, M. Campbell. H. Kress-Gazit, “Execution and Analysis of High-Level Tasks with Dynamic Obstacle Anticipation,” International Conference on Robotics and Automation, 2012.
10. B. Jones, M. Campbell, L. Tong, “Consensus of Stochastic Maps,” SPIE Defense, Security, and Sensing, 2012.
11. B. Jones, M. Campbell, L. Tong, “Bipartite Matching of Stochastic Maps,” 49th Annual Allerton Conference on Communication, Control, and Computing, 2011.
12. J. Hardy, M. Campbell, “Clustering Obstacle Predictions to Improve Contingency Planning for Autonomous Road Vehicles in Congested Environments,” IEEE/RSJ International Conference on Intelligent Robots and Systems, Sept 2011.
13. Ponda, S., Ahmed, N., Luders, B., Sample, E., Levine, D., Hoossainy, T., Shah, D., Campbell, M., and How, J. P., “Decentralized Information-Rich Planning and Hybrid Sensor Fusion for Uncertainty Reduction in Human-Robot Missions,” AIAA Guidance, Navigation and Control Conference, 2011. [Best Paper Award]
14. N. Ahmed, M. Campbell “Variational Learning of Autoregressive Mixture of Experts Models for Fully Bayesian Non-Markov Hybrid System Identification,” 2011 American Control Conference.
15. N. Ahmed, E. Sample, K. Ho, T. Hoossainy, M. Campbell “Categorical Soft Data Fusion for Gaussian Mixtures via Variational Bayesian Importance Sampling, with Applications to Cooperative Search,” 2011 American Control Conference.

M. Campbell 7
16. D. Shah, M. Campbell, “A Robust Qualitative Planner for Mobile Robot Navigation Using Human-Provided Maps,” 2011 International Conference on Robotics and Automation.
17. J. Schoenberg, A. Nathan, M. Campbell, “Segmentation of Dense Range Information in Complex Urban Scenes,” IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2010.
18. J. Hardy, M. Campbell, “Contingency Planning over Hybrid Obstacle Predictions for Autonomous Road Vehicles,” IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2010.
19. D. Shah, J. Schneider, M. Campbell, “A Robust Sketch Interface for Natural Robot Control,” IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2010.
20. M. Campbell, “Intelligent Autonomy in Robotic Systems,” National Academy of Engineering Frontiers in Engineering Symposium, 2010.
21. M. McClelland, M. Campbell, “Anticipation as a Method for Overcoming Time Delay in Control of Remote Systems,” AIAA Guidance, Navigation and Control Conference, Aug 2010.
22. D. Lee, M. McClelland, J. Schneider, T.-L. Yang, D. Gallagher, D. Shah, N. Ahmed, P. Moran, A. Nathan, H. Kress-Gazit, M. Campbell, “Distributed, Collaborative Human-Robotic Networks for Outdoor Experiments in Search, Identify and Track,” 2010 SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks, Toulouse France.
23. F. Havlak, M. Campbell, “Discrete and Continuous, Probabilistic Anticipation for Autonomous Robots in Urban Environments,” 2010 SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks, Toulouse France.
24. N. Ahmed, M. Campbell, “Variational Bayesian Data Fusion of Multi-class Discrete Observations with Applications to Cooperative Human-Robot Estimation,” 2010 International Conference on Robotics and Automation.
25. M. Campbell, “Intelligent Robotics in Sensor Network Applications,” SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks, 2009.
26. M. Campbell, J. Hardy “Sample based Perception, Anticipation and Planning for Robots in an Urban Environment,” SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks, 2009.
27. W. Whitacre, M. Campbell, “Geolocation using UAVs: Sensitivities and Bias Estimation,” AIAA Guidance, Navigation and Control Conference, 2009.
28. J. Schoenberg, M. Campbell, “Distributed Terrain Estimation Using a Mixture-Model Based Algorithm,” 12th International Conference on Information Fusion, 2009.
29. C. Rivadeneyra, J. R. Schoenberg, I. Miller and M. Campbell, “Probabilistic Estimation of Multi-Level Terrain Map in Real Time,” 2009 International Conference on Robotics and Automation.
30. J. R. Schoenberg, M. Campbell and I. Miller, “Global Localization with Multi-Modal Vision Measurements in Limited GPS Environments using Gaussian Sum Filters,” 2009 International Conference on Robotics and Automation.
31. D. Shah, S. Galster, M. Campbell, F. Bourgault, N. Ahmed, B. Knott, “A Study of Human-Robotic Teams with Various Levels of Autonomy,” 2009 AIAA Infotech conference.
32. P. Otanez, M. Campbell, “A Locally Most Powerful Detector for Mode Perturbation Signatures,” 2008 Conference on Decision and Control.
33. J. Hardy, M. Campbell, I. Miller, B. Schimpf, “Sensitivity Analysis of an Optimization-Based Trajectory Planner for Autonomous Vehicles in Urban Environments,” 2008 SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks.
34. F. Bourgault, A. Chokshi, J. Wang, D. Shah, F. Cedano and M. Campbell, “Scalable Bayesian Human-Robot Cooperation in Mobile Sensor Networks,” 2008 IEEE International Conference on Intelligent Robots and Systems.
35. W. Whitacre, M. Campbell, “Information-Theoretic Optimization of Periodic Orbits for Cooperative Geolocation,” AIAA Guidance, Navigation and Control Conference, Aug 2008.
36. T. McLoughlin, M. Campbell, “Distributed Estimate Fusion Filter for Large Spacecraft Formations,” AIAA Guidance, Navigation and Control Conference, Aug 2008.

M. Campbell 8
37. N. Ahmed, M. Campbell, “Multimodal Operator Decision Models,” 2008 American Control Conference, Seattle WA.
38. F. Bourgault, A. Chokshi, M. Campbell, “Human-Computer Augmented Nodes for Scalable Mobile Sensor Networks,” 2008 IEEE SMC International Conference on Distributed Human-Machine Systems, Athens Greece.
39. I. Miller and M. Campbell, “Particle Filtering for Map-Aided Localization in Sparse GPS Environments,” 2008 International Conference on Robotics and Automation, Pasadena CA.
40. I. Miller , B. Schimpf, M. Campbell, J. Leyssens, “Tightly-Coupled GPS / INS System Design for Autonomous Urban Navigation,” 2008 Position, Location and Navigation Symposium, Monterrey CA. [Best Student Paper]
41. D. Shah, M. Campbell, “State-Dependent Probabilistic Model Reduction for Evaluation of Human-Robotic Autonomous Systems”, 2007 IEEE Systems, Man and Cybernetics Conference.
42. F. Bourgault, N. Ahmed, D. Schrader, M. Campbell, “Probabilistic Operator-Multiple Robot Modeling Using Bayesian Network Representation,” 2007 AIAA Guidance, Navigation and Control Conference.
43. D. Stevenson, M. Wheeler, M. Campbell and W. Whitacre, R. Rysdyk and R. Wise, “Experiments in Cooperative Tracking of Moving Targets by a Team of Autonomous UAV’s”, 2007 AIAA Guidance, Navigation and Control Conference, AIAA-2007-6756
44. W. Whitacre, M. Campbell, “Cooperative Estimation in Networks of UAV’s with Delayed Data,” 2007 AIAA Guidance, Navigation and Control conference.
45. M. Wheeler, R. Wise, R. Rysdyk, W. Whitacre, M. Campbell, “Autonomous Cooperative Geo- Location and Tracking of Moving Targets,” 2007 Infotech@Aerospace Conference, AIAA-2007-2852.
46. W. Whitacre, M. Campbell, M. Wheeler, D. Stevenson, “Flight Results from Tracking Ground Targets Using SeaScan UAVs with Gimbaling Cameras,” 2007 American Control Conference.
47. I. Miller, M. Campbell, “Rao-Blackwellized Particle Filtering for Mapping Dynamic Environments with a Mobile Ground Robot,” 2007 International Conference on Robotics and Automation.
48. M. Campbell, F. Bourgault, S. Galster, D. Schneider, “Towards Probabilistic Operator-Multiple Robot Decision Models,” 2007 International Conference on Robotics and Automation.
49. M. Wheeler, M. Campbell, R. Rysdyk, B. Schrick, W. Whitacre, R. Wise, “Cooperative Tracking of Moving Targets by a Team of Autonomous UAV’s,” 2006 Digital Avionics Aerospace Conference.
50. M. Campbell, M. Wheeler, “A Vision Based Geolocation Tracking System for UAV’s,” 2006 AIAA Guidance, Navigation and Control Conference.
51. D. Zanon, M. Campbell, “Fuel Optimal Maneuvers with Spacecraft Attitude Constraints,” 2006 AIAA Guidance, Navigation and Control Conference.
52. T. McLoughlin, M. Campbell, “Robust Centroid Estimate Fusion for Spacecraft Formations,” 2006 AIAA Guidance, Navigation and Control Conference.
53. M. Campbell, S. Sukkarieh, A. Goktogan, “Operator Decision Modeling in Cooperative UAV Systems,” 2006 AIAA Guidance, Navigation and Control Conference.
54. P. Otanez, M. Campbell, “Hybrid Cooperative Reconnaissance Without Communication,” Conference on Decision and Control, Dec 2005.
55. J. Veverka, M. Campbell, “Operator Decision Modeling for ISR Type Missions,” IEEE Conference on Systems, Man, and Cybernetics, Oct 2005.
56. D. Schneider, M. Campbell, “Real Time Optimal Task Allocation in Highly Dynamic Environments,” ASME International Mechanical Engineering Congress and Exposition, Nov 2005.
57. J. Veverka, M. Campbell, “Towards an Operator Decision Model for ISR Type Missions,” AIAA Guidance, Navigation and Control Conference, Aug 2005.
58. J. Sullivan, M. Campbell, and H. Lipson, “Particle Filters as Exploration Tools for Autonomous Rovers,” AIAA Guidance, Navigation and Control Conference, Aug 2005.
59. P. Otanez, M. Campbell, “Mode Estimation Using Perturbation Signatures for Hybrid Multi-Vehicle Systems,” AIAA Guidance, Navigation and Control Conference, Aug 2005.

M. Campbell 9
60. D. Zanon, M. Campbell, “Optimal Planning for Tetrahedron Formations near Elliptical Orbits,” AIAA Guidance, Navigation and Control Conference, Aug 2005.
61. Y. Fang, M. Campbell, “Probability Map Building Algorithms Design for an Unknown Dynamic Environment,” International Conference on Natural Computation, 2005.
62. I. Miller, M. Campbell, “Validation of Simplified Formation Models at L2”, American Control Conference, June 2005.
63. J. Kulkarni, M. Campbell, “An Approach to Magnetic Torque Attitude Control of Satellites via H-inf Control for LTV Systems,” 2004 IEEE Conference on Decision and Control, Dec 2004.
64. Y. Fang, M. Campbell, “A Resource Allocation Algorithm for Multiple Tasks of RoboFlag Environment,” 2004 IEEE Conference on Robotics and Biomimetics, August 2004.
65. T. McLoughlin, and M. Campbell, “Precision Formation Keeping at L2 Using the Autonomous Formation Flying Sensor,” 2nd International Formation Flying Symposium, Sept 2004.
66. J. Ousingsawat, and M. Campbell, “Multiple Vehicle Team Tasking for Cooperative Estimation,” 2004 Guidance, Navigation and Control Conference.
67. T. McLoughlin, M. Campbell, “Robust Sensing, Communication and Control Architectures for Large Precision Spacecraft Networks,” 2004 Guidance, Navigation and Control Conference, August 2004.
68. D. Zanon, M. Campbell, “Optimal Planning for Tetrahedral Formations Near Elliptical Orbits,” 2004 Guidance, Navigation and Control Conference, August 2004.
69. M. Campbell, R. D’Andrea, J.-W. Lee, and E. Scholte, “Experimental Demonstrations of Semi-Autonomous Control,” 2004 American Control Conference, June 2004.
70. J. Kulkarni, and M. Campbell, “Stabilization Spacecraft Flight in Halo Orbits: An H-inf Approach,” 2004 American Control Conference, June 2004.
71. P. Otanez, and M. Campbell, “Bounded Model Switching in Uncertain Hybrid Systems,” 2004 American Control Conference, June 2004.
72. M. Campbell, D. Zanon, and J. Kulkarni, “Cluster Planning and Control for Spacecraft Formations,” 2004 AAS/AIAA Spaceflight Mechanics Meeting, Feb 2004.
73. M. E. Campbell, J. Han, J. Lee, E. Scholte, J. Ousingsawat, “Validation of Active State Model based Control using the SeaScan UAV,” AIAA Unmanned Unlimited Systems, Technologies, and Operations Conference, San Diego CA, Sept. 2003.
74. S. Mohan, M. Campbell, et al, “The ICE CUBE Project”, Space 2003, Sept 2003. 75. Veverka, J. and Campbell, M., “Experimental Study of Information Load on Operators in Semi-
Autonomous Systems,” 2003 AIAA Guidance, Navigation and Control Conference, Austin TX, Aug. 2003.
76. Scholte, E. and Campbell, M., “Robust Nonlinear Model Predictive Control with Partial State Information,” 2003 AIAA Guidance, Navigation and Control Conference, Austin TX, Aug. 2003.
77. L. Breger, P. Ferguson, J. How, S. Thomas, T. McLoughlin and M. Campbell, “Distributed Control of Formation Flying Spacecraft Built on OA,” 2003 AIAA Guidance, Navigation and Control Conference, Austin TX, Aug. 2003.
78. J. Han and Campbell, M., “Artificial Potential Guided Evolutionary Path Plan for Target Pursuit and Obstacle Avoidance,” 2003 AIAA Guidance, Navigation and Control Conference, Austin TX, Aug. 2003.
79. J. Sullivan, S. Waydo, and Campbell, M., “Using Stream Functions to Generate Complex Behavior,” 2003 AIAA Guidance, Navigation and Control Conference, Austin TX, Aug. 2003.
80. A. I. Chaudhry, R. D’Andrea, and M. Campbell, “RoboFlag – A Framework for Exploring Control, Planning, and Human Interface Issues Related to Coordinating Multiple Robots in a Realtime Dynamic Environment,” 11th International Conference on Advanced Robotic, Portugal, June 2003.
81. Campbell, M., D’Andrea, R., Schneider, D., Chaudhry, A., Waydo, S., Sullivan, J., Veverka, J., Klochko, A., “RoboFlag Games using Systems Based, Hierarchical Control,” American Control Conference, June 2003.

M. Campbell 10
82. Hoskins, A., Sarmiento, C., Rayburn, C., and Campbell, M., “The Electromagnetic Compatibility of Pulsed Plasma Thrusters with Spacecraft Systems,” 51st Joint Army-Navy-NASA-Air Force (JANNAF) Propulsion Meeting, November 2002.
83. Campbell, M., “Planning Algorithm for Large Satellite Clusters,” AIAA Guidance, Navigation and Control Conference, Monterrey CA, August 2002.
84. Campbell, M., Ousingsawat, J. “On-line Estimation and Path Planning for Multiple Vehicles in an Uncertain Environment,” AIAA Guidance, Navigation and Control Conference, Monterrey CA, August 2002.
85. Scholte, E., Campbell, M., “On-line Nonlinear Guaranteed Estimation with Application to a High Performance Aircraft,” American Control Conference, Anchorage AK, May 2002.
86. Brunke, S., Campbell, M, “Estimation Architecture for Future Autonomous Vehicles,” American Control Conference , Anchorage AK, May 2002.
87. Campbell, M, Udrea, B., “Collision Avoidance in Satellite Clusters,” American Control Conference, Anchorage AK, May 2002.
88. Waydo, S., Henry, D., Campbell, M., “CubeSat Design for LEO-Based Earth Science Missions,” IEEE Aerospace Conference, Big Sky MT, March 2002.
89. Meller, D. M., Reiter, J., Terry, M., Böhringer, K. F., Campbell, M. “A Docking System for MicroSatellites based on MEMS Actuator Arrays,” AIAA Structures, Structural Dynamics and Materials Conference, April 2001.
90. Campbell, M., Brunke, S., “Nonlinear Estimation of Aircraft Models for On-line Control Customization,” IEEE Aerospace Conference, Big Sky MT, March 2001.
91. Campbell, M., Knagenhjelm, V., Yingling, J., “Flight Software Development for the ION-F Formation Flying Mission,” 2001 IEEE Aerospace Conference, Big Sky MT, March 2001.
92. Meller, D., Sripruetkiat, P., Makovec, K., Campbell, M., Fullmer, R., Hall, C., “Digital CMOS Cameras for Attitude Determination,” 2000 AIAA/USU Small Satellite Conference, August, 2000.
93. Schetter, T., Campbell, M., Surka, D., “Multiple Agent-Based Autonomy for Satellite Constellations,” 2000 ASA/MA Conference, September, 2000.
94. Rayburn, C., Campbell, M., Hoskins, A., Cassady, J., “Development of a micro-PPT for the Dawgstar Nanosatellite,” AIAA Joint Propulsion Conference, July 2000.
95. Campbell, M., Swenson, C., Fullmer, R., Hall, C., “The Ionospheric Observation Nanosatellite Formation – ION-F,” Small Satellite Systems and Service Conference, La Baule, France, June 2000.
96. Campbell, M. Schetter, T., “Formation Flying Mission for the UW Dawgstar Nanosatellite,” IEEE Aerospace Conference, March 2000.
97. Cassady R. J., Hoskins, W. A., Campbell M., and Rayburn, C., “A Micro-Pulsed Plasma Thruster for the Dawgstar Spacecraft” IEEE Aerospace Conference, March 2000.
98. Schetter, T., Campbell, M., Surka, D., “TeamAgent for Multiple-Agent based Satellite Clusters (TechSat21),” 2000 GSFC Workshop on Multi-Agent Systems, Greenbelt MD, March 2000.
99. Schetter, T., Campbell, M., Surka, D., “Comparison of Multiple Agent Based Organizations for Satellite Constellations,” 2000 FLAIRS AI Conference, Orlando FL, April 2000.
100. Campbell, M., Fullmer, R., Hall, C., “The ION-F Formation Flying Experiments,” AIAA Space Flight Mechanics Meeting, January 2000.
101. Campbell, M., et al “The ION-F Mission and Dawgstar Satellite,” 1999 AIAA Space Technology Conference, September 1999.
102. Campbell, M., et al “The UW Dawgstar Nanosatellite,” AIAA/USU Small Satellite Conference, August 1999.
103. Reiter, J., Böhringer, K., Campbell, M., “MEMS Control Moment Gyroscope Design and Wafer-Based Spacecraft Chassis Study”, SPIE Symposium on Micromachining and Microfabrication, Santa Clara, CA, September 1999.
104. Brunke, S., Campbell, M., “Autonomous Identification for High Performance Control,” 1999 AIAA Guidance, Navigation, and Control Conference, August 1999.

M. Campbell 11
105. Hoskins, W. A., Wilson, M. J., Willey, M. J., Meckel, M. J., Campbell, M., Chung, S., “PPT Development Efforts at Primex Aerospace Company,” Joint Propulsion Conference, July 1999. [Best Paper Award]
106. Martin, M., Cobb, R., Schlossberg, H., Mitola, J., Weidow, D., Peffer, A., Blomquist, R., Campbell, M., Hall, C., Hansen, E., Horan, S., Kitts, C., Redd, F., Reed, H., Spence, H., Twiggs, B., “University Nanosatellite Program,” IAF Symposium, Redondo Beach, April 1999.
107. Martin, M., Cobb, R., Schlossberg, H., Mitola, J., Weidow, D., Peffer, A., Blomquist, R., Campbell, M., Hall, C., Hansen, E., Horan, S., Kitts, C., Redd, F., Reed, H., Spence, H., Twiggs, B., “University Nanosatellite Program,” 2nd international Conference on Integrated Micro-nanotechnology for Space Applications, April 1999.
108. Campbell, M., Hauge, G., “Shaping the Transmissibility for Six-Axis Active Vibration Isolators,” AIAA/ASME Structures, Structural Dynamics and Materials Conference, April 1999.
109. Böhringer, K., Campbell, M., Vagners, J., “AI Based Satellite Constellations,” American Association for Artificial Intelligence (AAAI) Spring Symposium Series, March 1999.
110. Thayer, D., Campbell, M., Vagners, J., “Six Axis Isolation on the UW Hexapod,” 1999 AAS Guidance, Navigation, and Control Conference, February 1999.
111. Campbell, M., “Oh, now I get it!” Frontiers in Education Conference, Tempe AZ, November 1998. [Best Paper Award]
112. Campbell, M., Böhringer, K., “Intelligent Satellite Teams for Space Science,” 2nd international Conference on Integrated Micro-nanotechnology for Space Applications, April 1999.
113. Campbell, M. E., “Uncertainty Effects in Model-Data Correlation,” Proceedings of the 38th Structures, Structural Dynamics and Materials Conference, Kissimmee, FL, April 1997, Pages 76-86.
114. Crawley, E. F. and Campbell, M. E., “Actuator and Sensor Design for Controlled Structures,” Proceedings of the 38th Structures, Structural Dynamics and Materials Conference, Kissimmee, FL, April 1997, Pages 2972-2982.
115. Campbell, M. E., Grocott, S. C. O., and How, J. P. and Woods-Vedeler, J. A., “Overview of Closed Loop Results for MACE,” Proceedings of the IFAC 13th World Congress, San Francisco, CA, July 1996, Pages 49-54.
116. Campbell, M. E., “Identification and Estimation for Control Design,” Proceedings of the IFAC 13th World Congress, San Francisco, CA, July 1996, Pages 209-214.
117. Grocott, S. C. O. and Campbell, M. E., “Control Analysis Results MACE: Methods and Limitations,” Proceedings of the 13th World Congress, San Francisco, CA, July 1996, Pages 43-48.
118. Campbell, M. E. and Crawley, E. F., “Uncertainty Modeling for Structural Control Analysis and Synthesis,” Proceedings of the 37th Structures, Structural Dynamics and Materials Conference, Salt Lake City, UT, Apr. 1996, Pages 1547-1557.
119. Campbell, M. E., Grocott, S. C. O., How, J. P., Miller, D. W., and Crawley, E. F., “Verification Procedure for On-orbit Controllers for the Middeck Active Control Experiment,” Proceedings of the American Control Conference, Seattle, WA, June 1995, Pages 3600-3605.
120. Miller, D., Glaese, R., Grocott, S., Campbell, M., How, J., Liu, K., de Luis, J., and Stover, G., “On-orbit Predictions and Results from the Middeck Active Control Experiment,” Proceedings of the American Control Conference, Seattle, WA, June 1995, Pages 397-401.
121. Miller, D. W. and Campbell, M. E., “Overview of the Middeck Active Control Experiment,” Proceedings of the 18th AAS Guidance and Control Conference, Keystone, CO, Feb. 1995.
122. Campbell, M. E. and Crawley, E. F., “The SISO Linear Quadratic Gaussian Compensator for Lightly Damped Structures,” Proceedings of the American Control Conference, Baltimore, MD, June 1994, Pages 3464-3469.
123. Campbell, M. E. and Crawley, E. F., “Classically Rationalized Low Order Robust Structural Controllers,” Proceedings of the 35th Structures, Structural Dynamics and Materials Conference, Hilton Head, SC, Apr. 1994, Pages 1923-1935.
M. Campbell 12
INVITED LECTURES AND SEMINARS 1. NASA Ames Research Center, “Information Fusion in Human-Robotic Systems” Sunnyvale, CA, 27
June 2013. 2. Rensselaer Polytechnic Institute, Leaders in Engineering Lecture Series, “Towards Symbiotic
Autonomy with Robots and People,” 24 October 2012. 3. National Academy of Sciences, Distinctive Voices Series, “Intelligent and Autonomous Systems,”
Irvine CA, 10 Oct 2012. 4. Cornell Space Sciences, Planetary Lunch Seminar, “Enabling Long Term Autonomous Robotic
Operations for Planetary Exploration,” 1 Oct 2012. 5. SPIE Conference on Unmanned/Unattended Sensors and Sensor Networks, “Fusion, planning and
humans in sensor networks,” Keynote Speaker, 26 Sept 2012 6. National Academy of Science Chinese-American Kavli Frontiers of Science Symposium, Shenzhen,
China, Nov 2011. 7. NSF-ARO Frontiers of Real-World Multi-Robot Systems: Challenges and Opportunities, Plenary
Talk, 10 Oct 2011. 8. DARPA Workshop on Collaborative Autonomy, Invited Speaker, Oct 2011. 9. NASA-SMC Workshop on Human-Robotic Interaction, Invited Speaker, Aug 2011. 10. Jet Propulsion Laboratory, “Advanced Perception Methods in Intelligent and Human-Robotic
Systems,” Nov 9 2010. 11. National Academy of Engineering Frontiers in Engineering Symposium, “Intelligent Autonomy in
Robotic Systems,” Sept 24 2010. 12. SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks, “Distributed,
Collaborative Human-Robotic Networks,” Keynote Speaker, 22 Sept 2010 13. University of Illinois, Dept of Aerospace Engineering Seminar, “Intelligent Autonomy with Robots &
Humans”, 26 April 2010. 14. 2009 SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks, “Intelligent
Robotics in Sensor Network Applications,” Keynote Speaker, 1 Sept 2009 15. ONR/ARO/NSF Workshop on Distributed Video Networks, “Sensing, Cooperation and Control in
Networked Systems,” Riverside CA, 11 May 2009. 16. SPIE Unmanned Systems Technology XI, “The interaction of perception and planning in autonomous
vehicles,” Keynote Speaker, 15 April 2009. 17. University of Washington, Robotics and Controls Series, “Human-Robotic Interaction using Network
Science”, 27 February 2009. 18. University of Washington, Aeronautics and Astronautics Seminar Series, “Autonomous Vehicles for
Aerospace”, 26 February 2009. 19. Cornell University, Theoretical and Applied Mechanics Symposium, “The Challenges of Driving
Autonomously,” Dec 3 2008. 20. City College of New York (CCNY), PRISM Lab, “Perception and Planning in an Urban
Environment ”, 13 Nov 2008. 21. Chinese Academy of Sciences (CAS), Shenyang Institute of Automation, Shenyang China, Keynote
Speaker, Symposium on Robotics and Manufacturing Technology, “Future Directions in Estimation and Control of Autonomous Vehicles” Oct 12 2008.
22. Shanghai University, Shanghai China, “Next Generation Autonomous Vehicles,” 13 Oct 2008. 23. ETH Zurich, “Sensor Fusion and Tracking in an Urban Environment,” Sept 16, 2008. 24. Draper Labs, “Beyond The DARPA Urban Challenge,” June 24, 2008. 25. Daimler Trucks North America, “Cornell’s Skynet: Technologies for Autonomous Urban Driving”, 9
June 2008. 26. University of Pennsylvania, GRASP Lab, “Sensor Fusion and Tracking in an Urban Environment”
29 February 2008
M. Campbell 13
27. Penn State University, “Tracking in an Urban Environment” 26 February 2008 28. Google Research Group, “Team Cornell and the DARPA Urban Challenge.” 17 January 2008 29. Army Research Lab, “Team Cornell and the DARPA Urban Challenge.” 14 January 2008 30. Deakin University, “Team Cornell and the DARPA Urban Challenge.” 20 December 2007 31. University of Sydney, “Team Cornell and the DARPA Urban Challenge.” 19 December 2007 32. The Insitu Group, “Estimation for Geolocation”, 14 July, 2007. 33. Syracuse University, “Semi-Autonomous, Networked Control Systems,” 29 March 2007 34. Air Force Research Lab, Center for Control Science, WPAFB, “Semi-Autonomous Systems:
Probabilistic Operator-Vehicle Models,” 3 May, 2007. 35. Air Force Research Lab/Aerospace Corporation, “Bayesian Belief Networks: Definitions,
Applications and Challenges for Anticipation,” 14 Feb, 2007. 36. The Insitu Group, “Flight Results in Geolocation using ScanEagle”, 19 Oct, 2006. 37. Sibley School of Mechanics and Aerospace Engineering, Cornell University, “Technologies for Semi-
Autonomous, Networked Cooperative Vehicles”, 5 Sept 2006. 38. Jet Propulsion Laboratory, Pasadena CA, “Robust Centroid Estimation in Spacecraft Formations
using Sensor Fusion, Switching, Scheduling, and Communications”, Aug 31 2006. 39. University of Sydney, Sydney Australia, “Decision Modeling in Coupled Operator-Multiple Vehicle
Systems using Probabilistic Graphs”, July 18 2006. 40. University of Sydney, Sydney Australia, “Operator Decision Modeling in Semi-Autonomous
Cooperative Control Systems”, Jan 2006. 41. The Insitu Group, Bingen WA, “ScanEagle Geolocation,” Dec 2005. 42. Cornell Alumni Club of Portland, “Autonomous Vehicle Research at Cornell,” Nov 2005. 43. Air Force Research Laboratory, Wright-Patterson AFB, “Operator Decision Modeling in Semi-
Autonomous Cooperative Control Systems”, June 2005. 44. Lockheed Martin, Owego NY, “Collaborative RSTA Behaviors for Unmanned Vehicles,” April 2005. 45. Draper Labs, Cambridge MA, “Semi-Autonomous Control”, March 2005. 46. AuSpace, Inc., Canberra Australia, “Formation Flying Spacecraft,” Feb 2005. 47. Sydney University, Sydney Australia, “Semi-Autonomous Cooperative Control of Multiple
Vehicles,” Feb 2005. 48. The Insitu Group, Bingen WA, “Cooperative Planning for Tracking,” Sept 2004. 49. Cornell Engineering Explorations Program, “Cornell Satellites: Student Designed, Developed, and
Operated,” Aug 2004. 50. Alphatech, Inc. “Cooperative Jamming,” July 2004. 51. Lockheed Martin Owego, Autonomy Group, “Cooperative Vehicles for Reconnaissance”, June 2004. 52. Virginia Tech University, “Semi-Autonomous Control of Multiple Vehicle Systems,” November
2003. 53. Penn State University, Center for Acoustics and Vibrations, “Origins of Life: Technologies for Future
Space Telescopes”, November 2002 54. DARPA IXO Director Meeting, Arlington VA, “Human Centered, Variable Initiative Control of
Complex Automata-Teams”, October 2002 55. NASA Human/Robotic Exploration Workshop, Langley VA, “Human Centered Control of Complex
Automata-Teams”, November 2001. 56. TechSat21 Preliminary Design Review, Albuquerque, NM, “Collision Monitoring and Avoidance
within Satellite Clusters,” July 2001. 57. DARPA Human Centered Control Workshop, Seattle WA, “Uncertainty Management in Semi-
Autonomous Systems,” March 2001. 58. University of Washington Saturday Seminars, Seattle WA, “A Dawg Space Odyssey,” November
2000. 59. University of Washington, Controls and Robotics Colloquium, “The Future of Systems and
Controls,” (with J. Vagners), October 2000.
M. Campbell 14
60. Cornell University, Sibley School of Mechanical and Aerospace Engineering, Ithaca NY, “Multiple Satellite Space Systems: Design, Control, and Autonomy”, September 2000.
61. NASA GSFC, Guidance Navigation and Control Center, Greenbelt MD, “ION-F Formation Flying”, August 2000.
62. Boeing Company, Boeing Leadership Center, St. Louis MO, “Active State Model/On-line Control Customization Collaboration,” June 2000.
63. Boeing Company, Boeing Leadership Center, St. Louis MO, “Uncertainty Modeling for Active State Modeling,” April 2000.
64. Applied Physics Lab/Johns Hopkins University, Columbia MD, “Dawgstar and the Cross-link Design”, April 2000.
65. Air Force Research Lab, Center for Control Theory, Dayton OH, “Cooperative Vehicle Control in Air and Space,” March 2000.
66. Purdue University, Dept. of Aeronautics and Astronautics, W. Lafayette IN, “Multiple Satellite Space Systems: Design, Control, and Autonomy,” March 2000.
67. Boeing Company, Kent WA, “UW Dawgstar: Design, Fabrication, and Operation of a Nanosatellite,” January 2000.
68. NASA Earth Science Enterprise Technology Planning Workshop, Arlington VA, “Technologies for Distributed Satellite Systems”, January 2000.
69. Air Force Research Laboratory, Phillips Lab, Albuquerque NM, “ION-F Preliminary Design Review,” January 2000.
70. NASA GSFC, Greenbelt MD, “ION-F Safety,” March 1999. 71. Boeing Company, St. Louis MO, “The Open Control Platform and Uncertainty Modeling,”
December 1999. 72. Stanford University, Dept. of Aeronautics and Astronautics, Palo Alto CA, “Formation Flying
Experiments using UW Dawgstar and ION-D”, October 1999. 73. Arizona State University, AFRL/ASU Meeting, Tempe AZ, “Ionospheric Observation Nanosatellite
Formation (ION-F),” July 1999. 74. NASA Headquarters, NASA Institute for Advanced Concepts Meeting, Washington DC, “Intelligent
Satellite Systems,” March 1999. 75. Air Force Research Laboratory, Phillips Lab, Albuquerque NM, “UW Nanosatellite,” January 1999. 76. NASA GSFC Workshop on Formation Flying, Greenbelt MD, “Intelligent Satellite Teams,”
December 1998. 77. Air Force Research Laboratory, Phillips Lab, Albuquerque NM, “Applications of High Performance
Structures Tools,” January 1998. 78. Boeing Company, Kent WA, “Vortex Breakdown Control,” (with Prof. M. Kurosaka), November
1997. 79. Stanford University, Palo Alto CA, “Controls Research at the University of Washington,” February
1998. 80. Air Force Research Laboratory, Phillips Lab, Albuquerque NM, “Applications of High Performance
Structures Tools,” January 1998. 81. University of Washington, Controls and Robotics Colloquium, “Applications of High Performance
Structures Tools,” October 1997. 82. Johnson Space Center, Space Station Group, “Controlled Structures,” May 1997. 83. University of Washington, Dept. of Aeronautics and Astronautics, “High Performance Structures,”
March 1997. 84. University of Washington, Controls and Robotics Colloquium, “Control Theory and High
Performance Structures,” March 1997. 85. Renssalaer Polytechnic Institute, Dept. of Mechanical Engineering, “High Performance Structures,”
March 1997. 86. Princeton University, Dept. of Mechanical and Aerospace Engineering, “High Performance
Structures,” February 1997.

M. Campbell 15
87. Massachusetts Institute of Technology, Dept. of Aeronautics and Astronautics, “High Performance Structures,” February 1997.
CONFERENCE PRESENTATIONS 1. M. Campbell, J. Hardy “Sample based Perception, Anticipation and Planning for Robots in an Urban
Environment,” SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks, 2009.
2. J. Hardy, M. Campbell, I. Miller, B. Schimpf, “Sensitivity Analysis of an Optimization-Based Tra jectory Planner for Autonomous Vehicles in Urban Environments,” 2008 SPIE Conference on Unmanned/Unattended Sensors and Sensor Networks.
3. F. Bourgault, N. Ahmed, D. Schrader, M. Campbell, “Probabilistic Operator-Multiple Robot Modeling Using Bayesian Network Representation,” 2007 AIAA Guidance, Navigation and Control Conference.
4. M. Campbell, F. Bourgault, S. Galster, D. Schneider, “Probabilistic Operator-Multiple Robot Modelling Using Bayesian Network Representation,” 2007 International Conference on Robotics and Automation.
5. M. Wheeler, M. Campbell, R. Rysdyk, B. Schrick, W. Whitacre, R. Wise, “Cooperative Tracking of Moving Targets by a Team of Autonomous UAV’s,” 2006 Digital Avionics Aerospace Conference.
6. M. Campbell, M. Wheeler, “A Vision Based Geolocation Tracking System for UAV’s,” 2006 AIAA Guidance, Navigation and Control Conference.
7. M. Campbell, S. Sukkarieh, A. Goktogan, “Operator Decision Modeling in Cooperative UAV Systems,” 2006 AIAA Guidance, Navigation and Control Conference.
8. T. McLoughlin, M. Campbell, “Robust Sensing, Communication and Control Architectures for Large Precision Spacecraft Networks,” 2004 Guidance, Navigation and Control Conference, August 2004.
9. M. Campbell, D. Zanon, and J. Kulkarni, “Cluster Planning and Control for Spacecraft Formations,” 2004 AAS/AIAA Spaceflight Mechanics Meeting, Feb 2004.
10. M. E. Campbell, J. Han, J. Lee, E. Scholte, J. Ousingsawat, “Validation of Active State Model based Control using the SeaScan UAV,” AIAA Unmanned Unlimited Systems, Technologies, and Operations Conference, San Diego CA, Sept. 2003.
11. J. Han and Campbell, M., “Artificial Potential Guided Evolutionary Path Plan for Target Pursuit and Obstacle Avoidance,” 2003 AIAA Guidance, Navigation and Control Conference, Austin TX, Aug. 2003.
12. Campbell, M., “Planning Algorithm for Large Satellite Clusters,” AIAA Guidance, Navigation and Control Conference, Monterrey CA, Aug. 2002.
13. Brunke, S., Campbell, M, “Estimation Architecture for Future Autonomous Vehicles,” American Control Conference , Anchorage AK, May 2002.
14. Campbell, M, Udrea, B., “Collision Avoidance in Satellite Clusters,” American Control Conference, Anchorage AK, May 2002.
15. Campbell, M. Schetter, T., “Formation Flying Mission for the UW Dawgstar Nanosatellite,” IEEE Aerospace Conference, March 2000.
16. Campbell, M., “Oh, now I get it!” Frontiers in Education Conference, Tempe AZ, Nov. 1998. 17. Campbell, M. E., “Uncertainty Effects in Model-Data Correlation,” AIAA/ASME 38th Structures,
Structural Dynamics and Materials Conference, Kissimmee, FL, Apr. 1997. 18. Crawley, E. F. and Campbell, M. E., “Actuator and Sensor Design for Controlled Structures,”
AIAA/ASME 38th Structures, Structural Dynamics and Materials Conference, Kissimmee, FL, Apr. 1997.
19. Campbell, M. E., Grocott, S. C. O., and How, J. P. and Woods-Vedeler, J. A., “Overview of Closed Loop Results for MACE,” IFAC 13th World Congress, San Francisco, CA, July 1996.
20. Campbell, M. E., “Identification and Estimation for Control Design,” Proceedings of the IFAC 13th World Congress, San Francisco, CA, July 1996.
M. Campbell 16
21. Campbell, M. E. and Crawley, E. F., “Uncertainty Modeling for Structural Control Analysis and Synthesis,” AIAA/ASME 37th Structures, Structural Dynamics and Materials Conference, Salt Lake City UT, Apr. 1996.
22. Campbell, M. E., Grocott, S. C. O., How, J. P., Miller, D. W., and Crawley, E. F., “Verification Procedure for On-orbit Controllers for the Middeck Active Control Experiment,” American Control Conference, Seattle, WA, June 1995.
23. Miller, D. W. and Campbell, M. E., “Overview of the Middeck Active Control Experiment,” 18th AAS Guidance and Control Conference, Keystone CO, Feb. 1995.
24. Campbell, M. E. and Crawley, E. F., “The SISO Linear Quadratic Gaussian Compensator for Lightly Damped Structures,” American Control Conference, Baltimore, MD, June 1994.
25. Campbell, M. E. and Crawley, E. F., “Classically Rationalized Low Order Robust Structural Controllers,” AIAA/ASME 35th Structures, Structural Dynamics and Materials Conference, Hilton Head, SC, Apr. 1994.
M. Campbell 17
SELECTED HONORS AND AWARDS Best Conference Poster Award, 2012 Int’l Symposium on Distributed Autonomous Robotic Systems AIAA Best Paper from the 2011 Guidance Navigation and Control Conference Defense Sciences Study Group (DSSG), 2012-2013 Plenary Talk, NSF-ARO Frontiers of Real-World Multi-Robot Systems: Challenges and Opportunities,
2011. Invited Speaker, National Academy of Science Kavli Frontiers of Science Symposium, 2011. Invited Paper, The Bridge, National Academy of Engineering, 2010 Invited Speaker, National Academy of Engineering Frontiers in Engineering Symposium, 2010 Keynote Speaker, SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks,
2010. Douglas Whitney Excellence in Teaching Award, Cornell University, 2010. Keynote Speaker, SPIE Europe Conference on Unmanned/Unattended Sensors and Sensor Networks,
Keynote Speaker, 2009 Keynote Speaker, SPIE Unmanned Systems Technology XI, Keynote Speaker, 2009. Keynote Speaker, Chinese Academy of Sciences (CAS), Shenyang Institute of Automation, Shenyang
China, Keynote Speaker, 2008. ASEE award for Teaching Excellence, 2007 Associate Fellow of the AIAA, 2006. Australian Research Council International Fellowship, visiting at the University of Sydney, Sydney
Australia, Jan 2006-July 2006. Stephen Miles ’57 College of Engineering Excellence in Teaching award, 2004-05. Visiting Research Scientist, The Insitu Group, Bingen WA, July 2005-Dec 2005. American Automatic Control Council Board of Directors (AIAA Associate Director from 2005-present,
AACC is a member of the International Federation of Automatic Control (IFAC)) 2004 AIAA Best Paper (by the AIAA Electric Propulsion Technical Committee).
Hoskins, A., Sarmiento, C., Rayburn, C., and Campbell, M., “The Electromagnetic Compatibility of Pulsed Plasma Thrusters with Spacecraft Systems,” AIAA Paper 2003-5016.
2004 Lockheed University Research Award UW Aeronautics and Astronautics Professor of the Year (1998-99)
The single highest faculty award from the UW Dept. of Aeronautics and Astronautics, as voted on by the seniors of the graduating Aeronautics and Astronautics class.
Frontier’s in Education New Faculty Fellow (1998) A competition based on essays about engineering education. The top ten award winners receive travel compensation to the Frontier’s in Education conference.
Best Paper award 1998 FIE Conference Awarded as the best essay of the ten FIE New Faculty Fellows, published in a Special issue of the Journal of Engineering Education.
Certification of Appreciation from NASA for the work on MACE and STS-67, 1998 Awarded from NASA for the work done on the MACE program, training the astronauts, working with the teams at JSC while in orbit, and collecting data important to the community.
General Motors Scholar (two years tuition, internship), 1988-1990. A two year full scholarship that includes full tuition and the choice of summer internship jobs.
Graduated Carnegie Mellon with University Honors, 1990. Awarded to graduating seniors with a GPA above a 3.5.
Bennett Prize for Academic Achievement in Mechanical Engineering, 1990 Awarded to the most outstanding graduating senior (first in ME class).
Andrew Carnegie Society Scholar (Dept of Mechanical Engineering), 1990 The highest undergraduate honor from Carnegie Mellon, given as a sign of excellence in

M. Campbell 18
scholarship to a single undergraduate from each department Tau Beta Pi Member
The Engineering Honor Society Mortar Board Member
National College Senior Honor Society Best Paper in Session awards at the American Control Conference
2002, 1996, 1995, 1994
M. Campbell 19
STUDENT AWARDS Best Paper Award: Brandon Jones, 2010 NSBE Aerospace Systems Conference Best Student Paper Award: Isaac Miller, 2008 PLANS conference. Best Paper in Session: Nisar Ahmed, 2008 American Control Conference Best Paper in Session: Jayant Kulkarni, 2004 American Control Conference Best Paper in Session: Paul Otanez, 2004 American Control Conference Best Paper in Session: David Schneider, 2003 American Control Conference Best Paper in Session: Eelco Scholte, 2002 American Control Conference Advisees with NSF Fellowships: Isaac Miller, Nisar Ahmed Advisees with NDSEG Fellowships: Danelle Shah, Cesar Rivadeneyra Mary Gates Fellowship (Kevin Halligan 1999, Steve Waydo 2000, Daniel Brown 2001)
Awarded to students who are working with a faculty advisor on cutting edge research. 2nd place, 2000 AIAA/USU Small Satellite Conference Best Student Paper/Presentation Competition
A panel reviewed competition that evaluates technical excellence, writing and presenting. An award $5,000 was won.
M. Campbell 20
COURSES TAUGHT
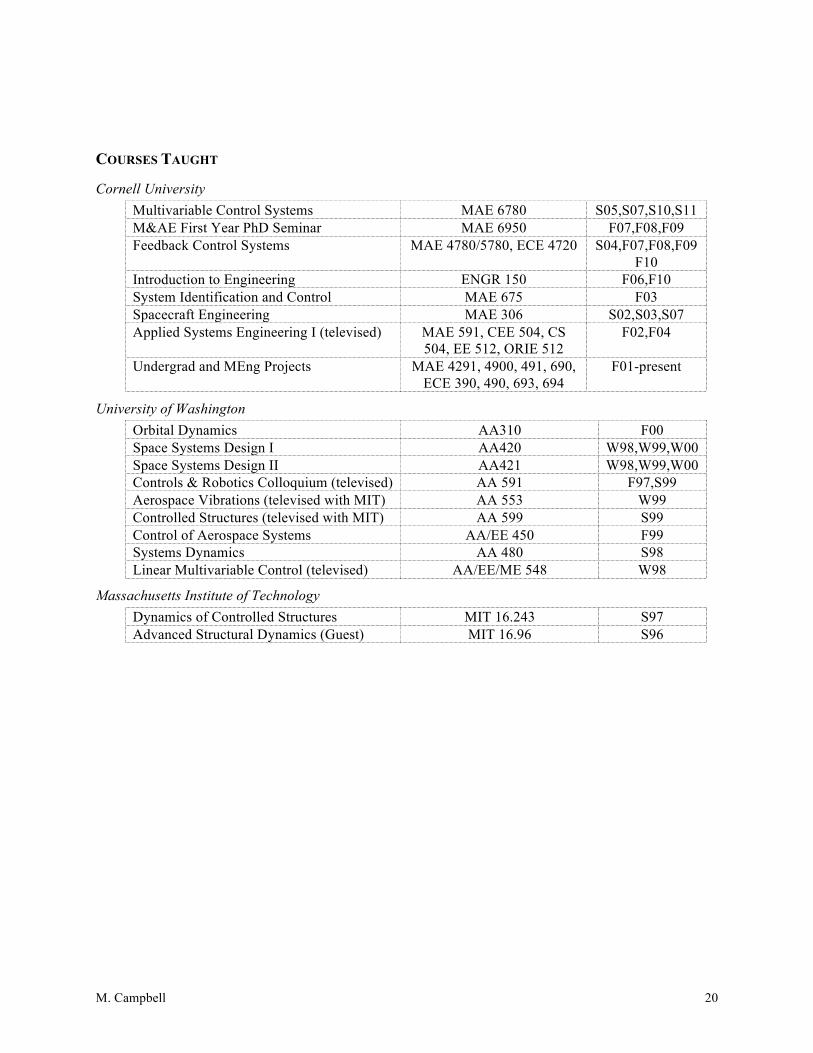
Cornell University Multivariable Control Systems MAE 6780 S05,S07,S10,S11 M&AE First Year PhD Seminar MAE 6950 F07,F08,F09 Feedback Control Systems MAE 4780/5780, ECE 4720 S04,F07,F08,F09
F10 Introduction to Engineering ENGR 150 F06,F10 System Identification and Control MAE 675 F03 Spacecraft Engineering MAE 306 S02,S03,S07 Applied Systems Engineering I (televised) MAE 591, CEE 504, CS
504, EE 512, ORIE 512 F02,F04
Undergrad and MEng Projects MAE 4291, 4900, 491, 690, ECE 390, 490, 693, 694
F01-present
University of Washington Orbital Dynamics AA310 F00 Space Systems Design I AA420 W98,W99,W00 Space Systems Design II AA421 W98,W99,W00 Controls & Robotics Colloquium (televised) AA 591 F97,S99 Aerospace Vibrations (televised with MIT) AA 553 W99 Controlled Structures (televised with MIT) AA 599 S99 Control of Aerospace Systems AA/EE 450 F99 Systems Dynamics AA 480 S98 Linear Multivariable Control (televised) AA/EE/ME 548 W98
Massachusetts Institute of Technology Dynamics of Controlled Structures MIT 16.243 S97 Advanced Structural Dynamics (Guest) MIT 16.96 S96
M. Campbell 21
ADVISING OF STAFF AND STUDENTS
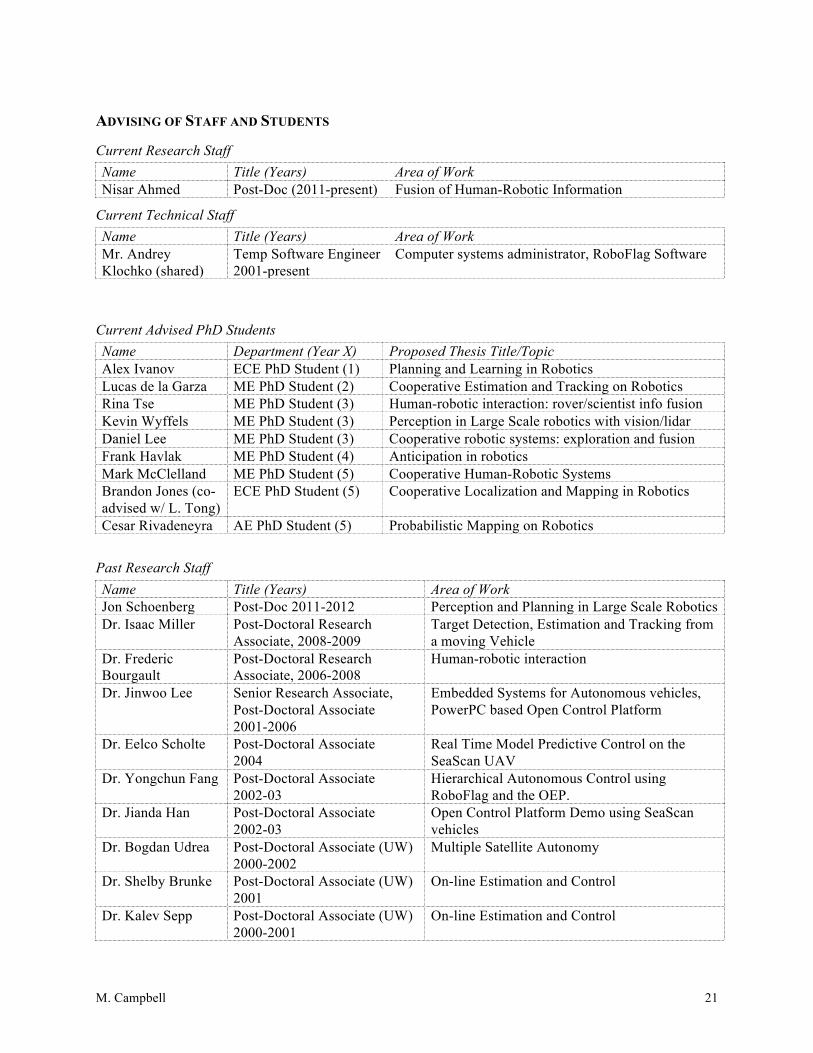
Current Research Staff Name Title (Years) Area of Work Nisar Ahmed Post-Doc (2011-present) Fusion of Human-Robotic Information
Current Technical Staff Name Title (Years) Area of Work Mr. Andrey Klochko (shared)
Temp Software Engineer 2001-present
Computer systems administrator, RoboFlag Software
Current Advised PhD Students Name Department (Year X) Proposed Thesis Title/Topic Alex Ivanov ECE PhD Student (1) Planning and Learning in Robotics Lucas de la Garza ME PhD Student (2) Cooperative Estimation and Tracking on Robotics Rina Tse ME PhD Student (3) Human-robotic interaction: rover/scientist info fusion Kevin Wyffels ME PhD Student (3) Perception in Large Scale robotics with vision/lidar Daniel Lee ME PhD Student (3) Cooperative robotic systems: exploration and fusion Frank Havlak ME PhD Student (4) Anticipation in robotics Mark McClelland ME PhD Student (5) Cooperative Human-Robotic Systems Brandon Jones (co-advised w/ L. Tong)
ECE PhD Student (5) Cooperative Localization and Mapping in Robotics
Cesar Rivadeneyra AE PhD Student (5) Probabilistic Mapping on Robotics
Past Research Staff Name Title (Years) Area of Work Jon Schoenberg Post-Doc 2011-2012 Perception and Planning in Large Scale Robotics Dr. Isaac Miller Post-Doctoral Research
Associate, 2008-2009 Target Detection, Estimation and Tracking from a moving Vehicle
Dr. Frederic Bourgault
Post-Doctoral Research Associate, 2006-2008
Human-robotic interaction
Dr. Jinwoo Lee Senior Research Associate, Post-Doctoral Associate 2001-2006
Embedded Systems for Autonomous vehicles, PowerPC based Open Control Platform
Dr. Eelco Scholte Post-Doctoral Associate 2004
Real Time Model Predictive Control on the SeaScan UAV
Dr. Yongchun Fang Post-Doctoral Associate 2002-03
Hierarchical Autonomous Control using RoboFlag and the OEP.
Dr. Jianda Han Post-Doctoral Associate 2002-03
Open Control Platform Demo using SeaScan vehicles
Dr. Bogdan Udrea Post-Doctoral Associate (UW) 2000-2002
Multiple Satellite Autonomy
Dr. Shelby Brunke Post-Doctoral Associate (UW) 2001
On-line Estimation and Control
Dr. Kalev Sepp Post-Doctoral Associate (UW) 2000-2001
On-line Estimation and Control
M. Campbell 22
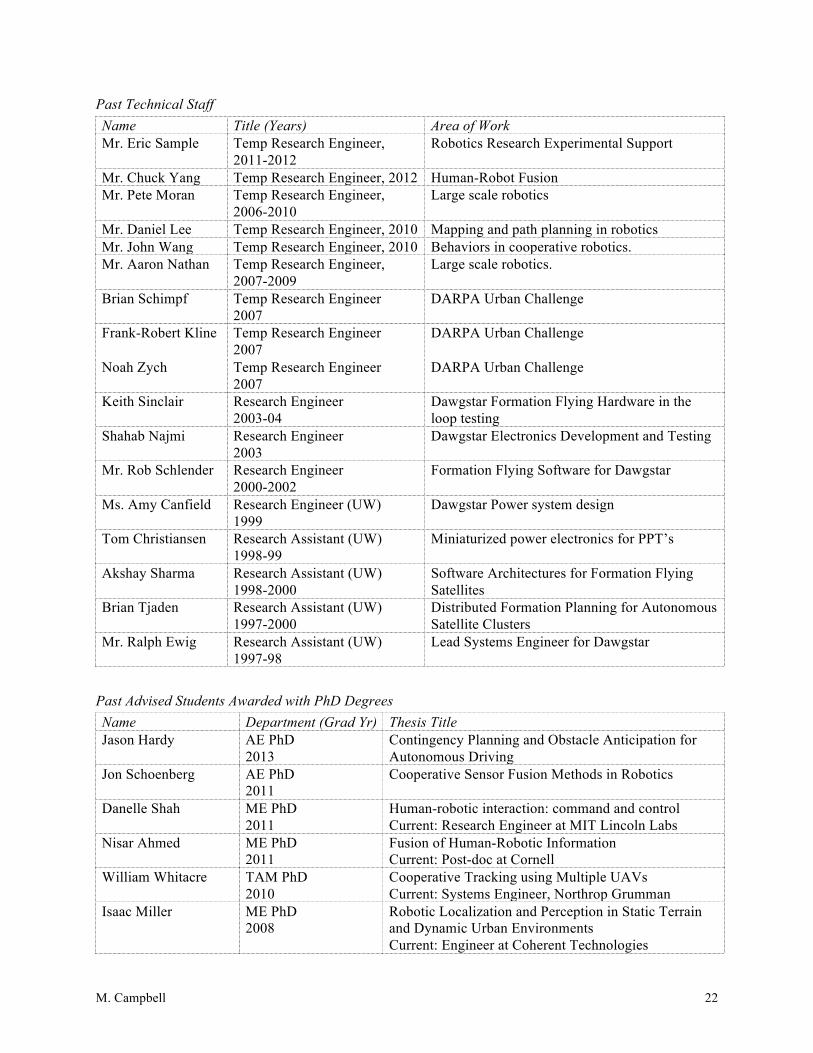
Past Technical Staff Name Title (Years) Area of Work Mr. Eric Sample Temp Research Engineer,
2011-2012 Robotics Research Experimental Support
Mr. Chuck Yang Temp Research Engineer, 2012 Human-Robot Fusion Mr. Pete Moran Temp Research Engineer,
2006-2010 Large scale robotics
Mr. Daniel Lee Temp Research Engineer, 2010 Mapping and path planning in robotics Mr. John Wang Temp Research Engineer, 2010 Behaviors in cooperative robotics. Mr. Aaron Nathan Temp Research Engineer,
2007-2009 Large scale robotics.
Brian Schimpf Temp Research Engineer 2007
DARPA Urban Challenge
Frank-Robert Kline Temp Research Engineer 2007
DARPA Urban Challenge
Noah Zych Temp Research Engineer 2007
DARPA Urban Challenge
Keith Sinclair Research Engineer 2003-04
Dawgstar Formation Flying Hardware in the loop testing
Shahab Najmi Research Engineer 2003
Dawgstar Electronics Development and Testing
Mr. Rob Schlender Research Engineer 2000-2002
Formation Flying Software for Dawgstar
Ms. Amy Canfield Research Engineer (UW) 1999
Dawgstar Power system design
Tom Christiansen Research Assistant (UW) 1998-99
Miniaturized power electronics for PPT’s
Akshay Sharma Research Assistant (UW) 1998-2000
Software Architectures for Formation Flying Satellites
Brian Tjaden Research Assistant (UW) 1997-2000
Distributed Formation Planning for Autonomous Satellite Clusters
Mr. Ralph Ewig Research Assistant (UW) 1997-98
Lead Systems Engineer for Dawgstar
Past Advised Students Awarded with PhD Degrees Name Department (Grad Yr) Thesis Title Jason Hardy AE PhD
2013 Contingency Planning and Obstacle Anticipation for Autonomous Driving
Jon Schoenberg AE PhD 2011
Cooperative Sensor Fusion Methods in Robotics
Danelle Shah ME PhD 2011
Human-robotic interaction: command and control Current: Research Engineer at MIT Lincoln Labs
Nisar Ahmed ME PhD 2011
Fusion of Human-Robotic Information Current: Post-doc at Cornell
William Whitacre TAM PhD 2010
Cooperative Tracking using Multiple UAVs Current: Systems Engineer, Northrop Grumman
Isaac Miller ME PhD 2008
Robotic Localization and Perception in Static Terrain and Dynamic Urban Environments Current: Engineer at Coherent Technologies
M. Campbell 23
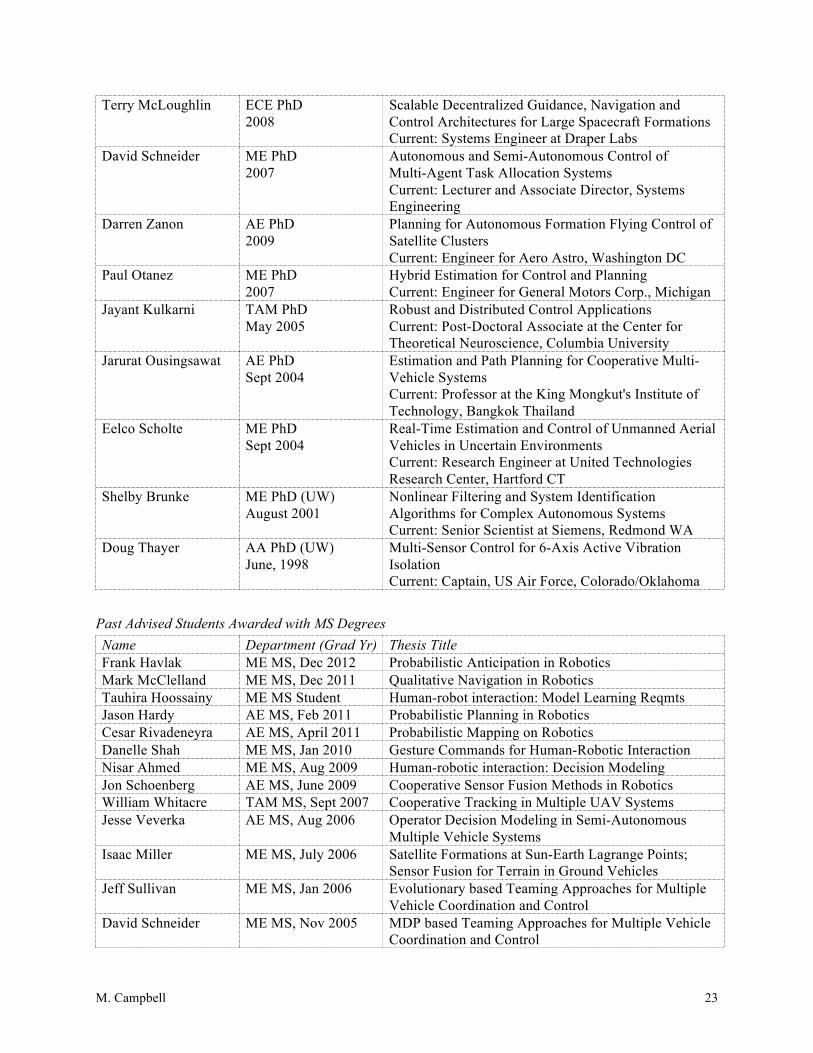
Terry McLoughlin ECE PhD 2008
Scalable Decentralized Guidance, Navigation and Control Architectures for Large Spacecraft Formations Current: Systems Engineer at Draper Labs
David Schneider ME PhD 2007
Autonomous and Semi-Autonomous Control of Multi-Agent Task Allocation Systems Current: Lecturer and Associate Director, Systems Engineering
Darren Zanon AE PhD 2009
Planning for Autonomous Formation Flying Control of Satellite Clusters Current: Engineer for Aero Astro, Washington DC
Paul Otanez ME PhD 2007
Hybrid Estimation for Control and Planning Current: Engineer for General Motors Corp., Michigan
Jayant Kulkarni TAM PhD May 2005
Robust and Distributed Control Applications Current: Post-Doctoral Associate at the Center for Theoretical Neuroscience, Columbia University
Jarurat Ousingsawat AE PhD Sept 2004
Estimation and Path Planning for Cooperative Multi-Vehicle Systems Current: Professor at the King Mongkut's Institute of Technology, Bangkok Thailand
Eelco Scholte ME PhD Sept 2004
Real-Time Estimation and Control of Unmanned Aerial Vehicles in Uncertain Environments Current: Research Engineer at United Technologies Research Center, Hartford CT
Shelby Brunke ME PhD (UW) August 2001
Nonlinear Filtering and System Identification Algorithms for Complex Autonomous Systems Current: Senior Scientist at Siemens, Redmond WA
Doug Thayer AA PhD (UW) June, 1998
Multi-Sensor Control for 6-Axis Active Vibration Isolation Current: Captain, US Air Force, Colorado/Oklahoma
Past Advised Students Awarded with MS Degrees Name Department (Grad Yr) Thesis Title Frank Havlak ME MS, Dec 2012 Probabilistic Anticipation in Robotics Mark McClelland ME MS, Dec 2011 Qualitative Navigation in Robotics Tauhira Hoossainy ME MS Student Human-robot interaction: Model Learning Reqmts Jason Hardy AE MS, Feb 2011 Probabilistic Planning in Robotics Cesar Rivadeneyra AE MS, April 2011 Probabilistic Mapping on Robotics Danelle Shah ME MS, Jan 2010 Gesture Commands for Human-Robotic Interaction Nisar Ahmed ME MS, Aug 2009 Human-robotic interaction: Decision Modeling Jon Schoenberg AE MS, June 2009 Cooperative Sensor Fusion Methods in Robotics William Whitacre TAM MS, Sept 2007 Cooperative Tracking in Multiple UAV Systems Jesse Veverka AE MS, Aug 2006 Operator Decision Modeling in Semi-Autonomous
Multiple Vehicle Systems Isaac Miller ME MS, July 2006 Satellite Formations at Sun-Earth Lagrange Points;
Sensor Fusion for Terrain in Ground Vehicles Jeff Sullivan ME MS, Jan 2006 Evolutionary based Teaming Approaches for Multiple
Vehicle Coordination and Control David Schneider ME MS, Nov 2005 MDP based Teaming Approaches for Multiple Vehicle
Coordination and Control
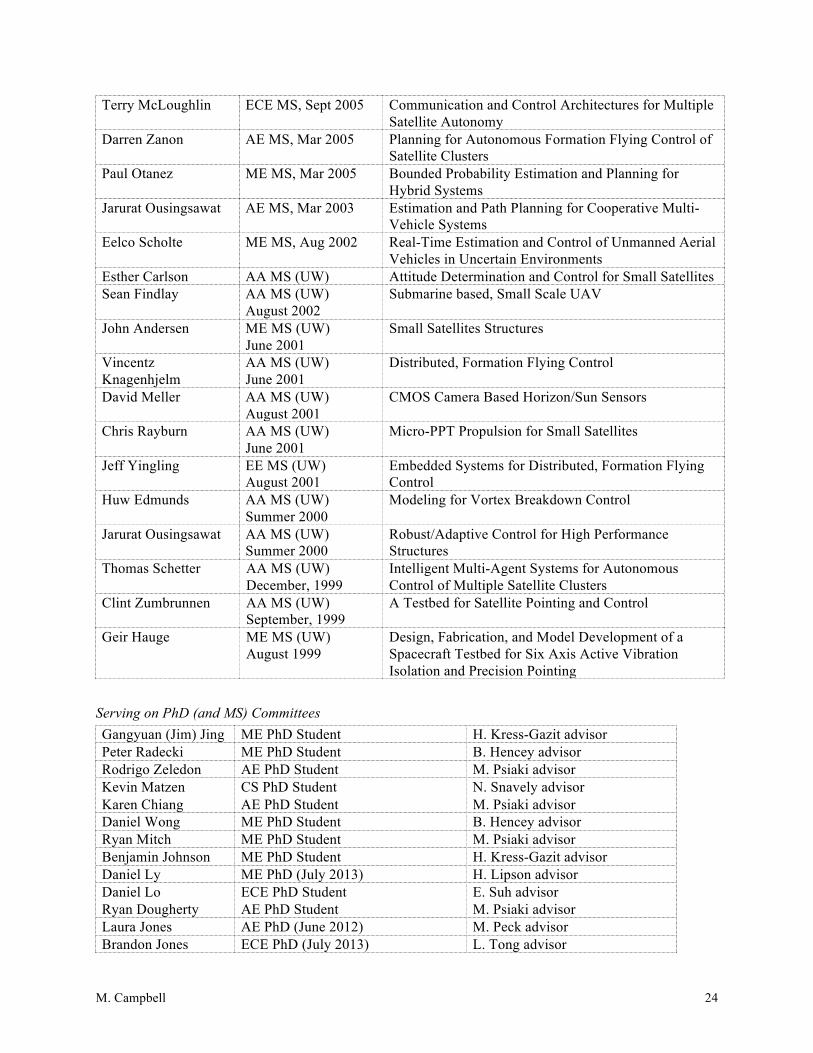
M. Campbell 24
Terry McLoughlin ECE MS, Sept 2005 Communication and Control Architectures for Multiple Satellite Autonomy
Darren Zanon AE MS, Mar 2005 Planning for Autonomous Formation Flying Control of Satellite Clusters
Paul Otanez ME MS, Mar 2005 Bounded Probability Estimation and Planning for Hybrid Systems
Jarurat Ousingsawat AE MS, Mar 2003 Estimation and Path Planning for Cooperative Multi-Vehicle Systems
Eelco Scholte ME MS, Aug 2002 Real-Time Estimation and Control of Unmanned Aerial Vehicles in Uncertain Environments
Esther Carlson AA MS (UW) Attitude Determination and Control for Small Satellites Sean Findlay AA MS (UW)
August 2002 Submarine based, Small Scale UAV
John Andersen ME MS (UW) June 2001
Small Satellites Structures
Vincentz Knagenhjelm
AA MS (UW) June 2001
Distributed, Formation Flying Control
David Meller AA MS (UW) August 2001
CMOS Camera Based Horizon/Sun Sensors
Chris Rayburn AA MS (UW) June 2001
Micro-PPT Propulsion for Small Satellites
Jeff Yingling EE MS (UW) August 2001
Embedded Systems for Distributed, Formation Flying Control
Huw Edmunds AA MS (UW) Summer 2000
Modeling for Vortex Breakdown Control
Jarurat Ousingsawat AA MS (UW) Summer 2000
Robust/Adaptive Control for High Performance Structures
Thomas Schetter AA MS (UW) December, 1999
Intelligent Multi-Agent Systems for Autonomous Control of Multiple Satellite Clusters
Clint Zumbrunnen AA MS (UW) September, 1999
A Testbed for Satellite Pointing and Control
Geir Hauge ME MS (UW) August 1999
Design, Fabrication, and Model Development of a Spacecraft Testbed for Six Axis Active Vibration Isolation and Precision Pointing
Serving on PhD (and MS) Committees Gangyuan (Jim) Jing ME PhD Student H. Kress-Gazit advisor Peter Radecki ME PhD Student B. Hencey advisor Rodrigo Zeledon AE PhD Student M. Psiaki advisor Kevin Matzen CS PhD Student N. Snavely advisor Karen Chiang AE PhD Student M. Psiaki advisor Daniel Wong ME PhD Student B. Hencey advisor Ryan Mitch ME PhD Student M. Psiaki advisor Benjamin Johnson ME PhD Student H. Kress-Gazit advisor Daniel Ly ME PhD (July 2013) H. Lipson advisor Daniel Lo ECE PhD Student E. Suh advisor Ryan Dougherty AE PhD Student M. Psiaki advisor Laura Jones AE PhD (June 2012) M. Peck advisor Brandon Jones ECE PhD (July 2013) L. Tong advisor
M. Campbell 25
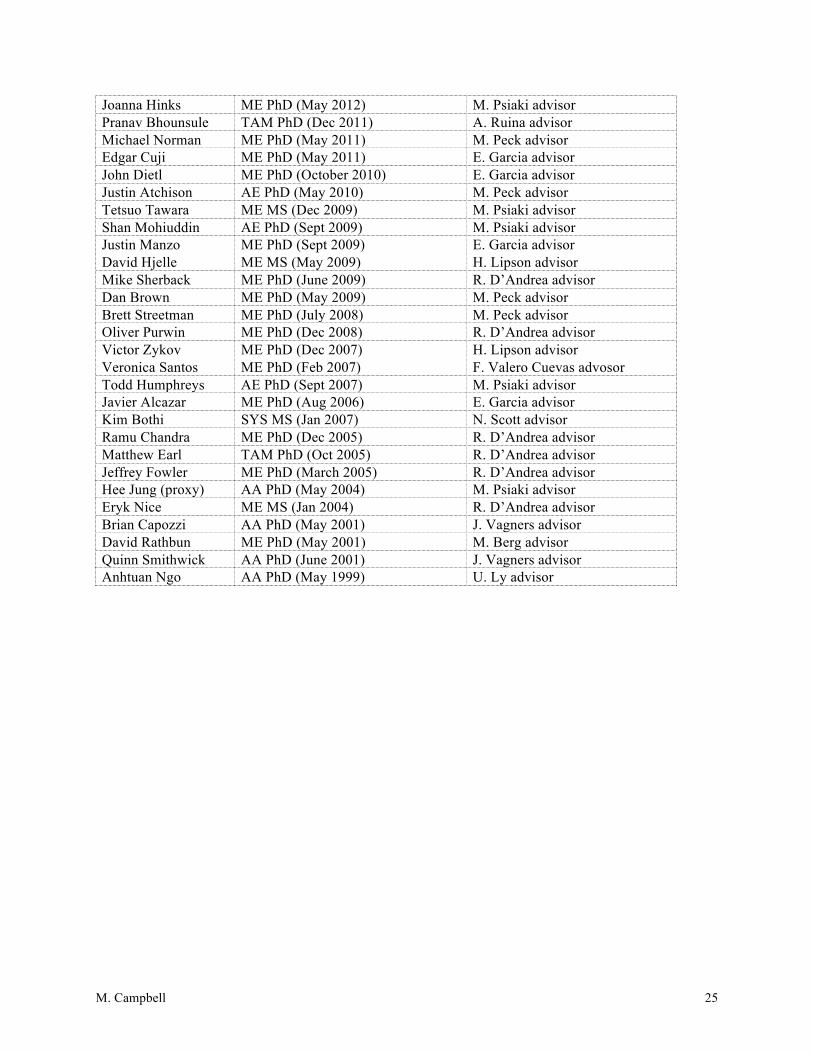
Joanna Hinks ME PhD (May 2012) M. Psiaki advisor Pranav Bhounsule TAM PhD (Dec 2011) A. Ruina advisor Michael Norman ME PhD (May 2011) M. Peck advisor Edgar Cuji ME PhD (May 2011) E. Garcia advisor John Dietl ME PhD (October 2010) E. Garcia advisor Justin Atchison AE PhD (May 2010) M. Peck advisor Tetsuo Tawara ME MS (Dec 2009) M. Psiaki advisor Shan Mohiuddin AE PhD (Sept 2009) M. Psiaki advisor Justin Manzo ME PhD (Sept 2009) E. Garcia advisor David Hjelle ME MS (May 2009) H. Lipson advisor Mike Sherback ME PhD (June 2009) R. D’Andrea advisor Dan Brown ME PhD (May 2009) M. Peck advisor Brett Streetman ME PhD (July 2008) M. Peck advisor Oliver Purwin ME PhD (Dec 2008) R. D’Andrea advisor Victor Zykov ME PhD (Dec 2007) H. Lipson advisor Veronica Santos ME PhD (Feb 2007) F. Valero Cuevas advosor Todd Humphreys AE PhD (Sept 2007) M. Psiaki advisor Javier Alcazar ME PhD (Aug 2006) E. Garcia advisor Kim Bothi SYS MS (Jan 2007) N. Scott advisor Ramu Chandra ME PhD (Dec 2005) R. D’Andrea advisor Matthew Earl TAM PhD (Oct 2005) R. D’Andrea advisor Jeffrey Fowler ME PhD (March 2005) R. D’Andrea advisor Hee Jung (proxy) AA PhD (May 2004) M. Psiaki advisor Eryk Nice ME MS (Jan 2004) R. D’Andrea advisor Brian Capozzi AA PhD (May 2001) J. Vagners advisor David Rathbun ME PhD (May 2001) M. Berg advisor Quinn Smithwick AA PhD (June 2001) J. Vagners advisor Anhtuan Ngo AA PhD (May 1999) U. Ly advisor
M. Campbell 26
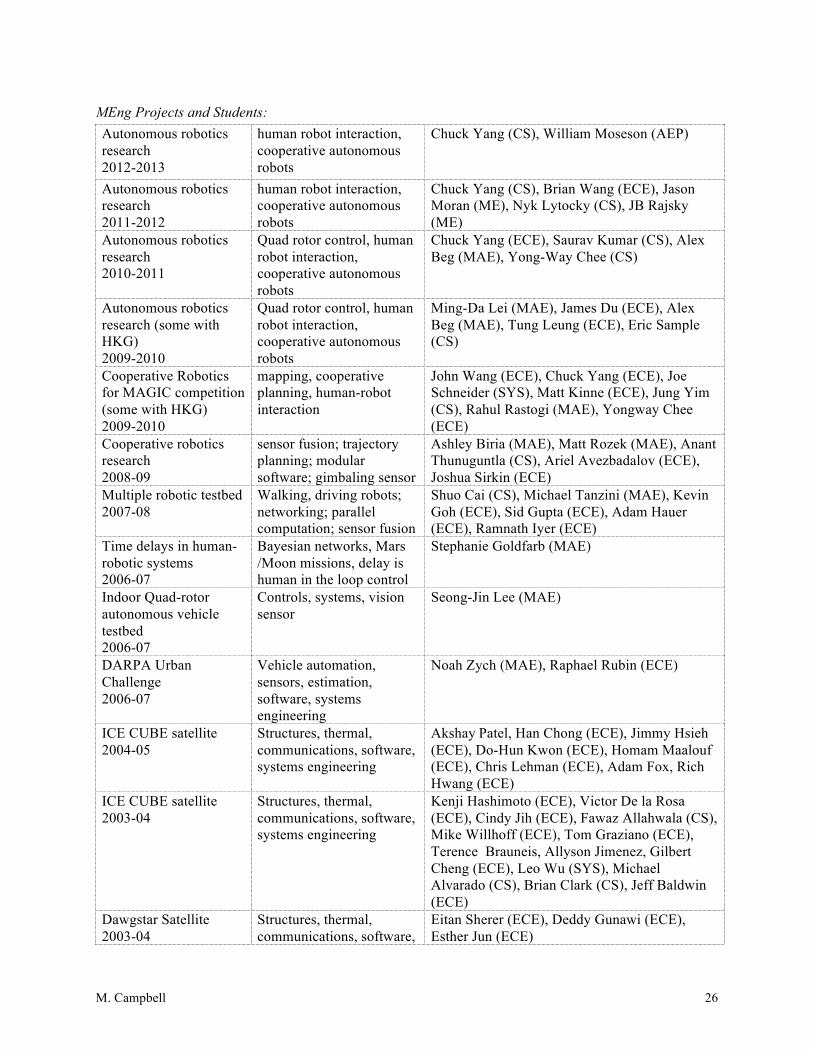
MEng Projects and Students: Autonomous robotics research 2012-2013
human robot interaction, cooperative autonomous robots
Chuck Yang (CS), William Moseson (AEP)
Autonomous robotics research 2011-2012
human robot interaction, cooperative autonomous robots
Chuck Yang (CS), Brian Wang (ECE), Jason Moran (ME), Nyk Lytocky (CS), JB Rajsky (ME)
Autonomous robotics research 2010-2011
Quad rotor control, human robot interaction, cooperative autonomous robots
Chuck Yang (ECE), Saurav Kumar (CS), Alex Beg (MAE), Yong-Way Chee (CS)
Autonomous robotics research (some with HKG) 2009-2010
Quad rotor control, human robot interaction, cooperative autonomous robots
Ming-Da Lei (MAE), James Du (ECE), Alex Beg (MAE), Tung Leung (ECE), Eric Sample (CS)
Cooperative Robotics for MAGIC competition (some with HKG) 2009-2010
mapping, cooperative planning, human-robot interaction
John Wang (ECE), Chuck Yang (ECE), Joe Schneider (SYS), Matt Kinne (ECE), Jung Yim (CS), Rahul Rastogi (MAE), Yongway Chee (ECE)
Cooperative robotics research 2008-09
sensor fusion; trajectory planning; modular software; gimbaling sensor
Ashley Biria (MAE), Matt Rozek (MAE), Anant Thunuguntla (CS), Ariel Avezbadalov (ECE), Joshua Sirkin (ECE)
Multiple robotic testbed 2007-08
Walking, driving robots; networking; parallel computation; sensor fusion
Shuo Cai (CS), Michael Tanzini (MAE), Kevin Goh (ECE), Sid Gupta (ECE), Adam Hauer (ECE), Ramnath Iyer (ECE)
Time delays in human-robotic systems 2006-07
Bayesian networks, Mars /Moon missions, delay is human in the loop control
Stephanie Goldfarb (MAE)
Indoor Quad-rotor autonomous vehicle testbed 2006-07
Controls, systems, vision sensor
Seong-Jin Lee (MAE)
DARPA Urban Challenge 2006-07
Vehicle automation, sensors, estimation, software, systems engineering
Noah Zych (MAE), Raphael Rubin (ECE)
ICE CUBE satellite 2004-05
Structures, thermal, communications, software, systems engineering
Akshay Patel, Han Chong (ECE), Jimmy Hsieh (ECE), Do-Hun Kwon (ECE), Homam Maalouf (ECE), Chris Lehman (ECE), Adam Fox, Rich Hwang (ECE)
ICE CUBE satellite 2003-04
Structures, thermal, communications, software, systems engineering
Kenji Hashimoto (ECE), Victor De la Rosa (ECE), Cindy Jih (ECE), Fawaz Allahwala (CS), Mike Willhoff (ECE), Tom Graziano (ECE), Terence Brauneis, Allyson Jimenez, Gilbert Cheng (ECE), Leo Wu (SYS), Michael Alvarado (CS), Brian Clark (CS), Jeff Baldwin (ECE)
Dawgstar Satellite 2003-04
Structures, thermal, communications, software,
Eitan Sherer (ECE), Deddy Gunawi (ECE), Esther Jun (ECE)
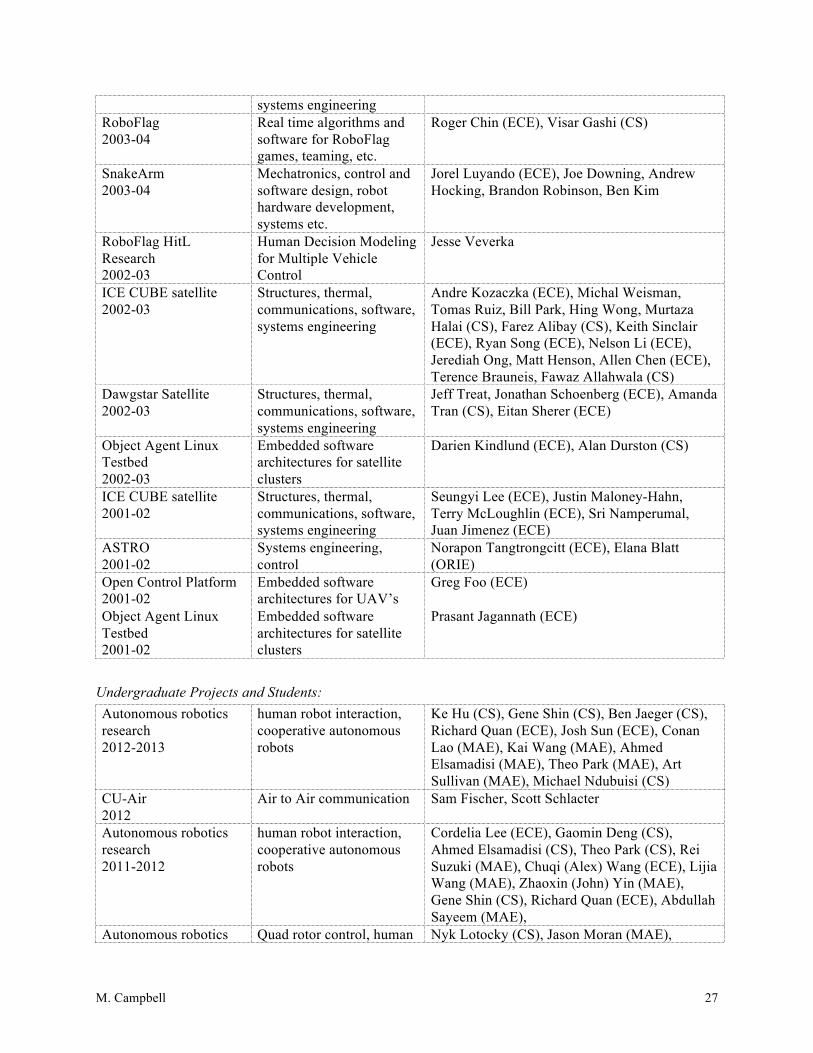
M. Campbell 27
systems engineering RoboFlag 2003-04
Real time algorithms and software for RoboFlag games, teaming, etc.
Roger Chin (ECE), Visar Gashi (CS)
SnakeArm 2003-04
Mechatronics, control and software design, robot hardware development, systems etc.
Jorel Luyando (ECE), Joe Downing, Andrew Hocking, Brandon Robinson, Ben Kim
RoboFlag HitL Research 2002-03
Human Decision Modeling for Multiple Vehicle Control
Jesse Veverka
ICE CUBE satellite 2002-03
Structures, thermal, communications, software, systems engineering
Andre Kozaczka (ECE), Michal Weisman, Tomas Ruiz, Bill Park, Hing Wong, Murtaza Halai (CS), Farez Alibay (CS), Keith Sinclair (ECE), Ryan Song (ECE), Nelson Li (ECE), Jerediah Ong, Matt Henson, Allen Chen (ECE), Terence Brauneis, Fawaz Allahwala (CS)
Dawgstar Satellite 2002-03
Structures, thermal, communications, software, systems engineering
Jeff Treat, Jonathan Schoenberg (ECE), Amanda Tran (CS), Eitan Sherer (ECE)
Object Agent Linux Testbed 2002-03
Embedded software architectures for satellite clusters
Darien Kindlund (ECE), Alan Durston (CS)
ICE CUBE satellite 2001-02
Structures, thermal, communications, software, systems engineering
Seungyi Lee (ECE), Justin Maloney-Hahn, Terry McLoughlin (ECE), Sri Namperumal, Juan Jimenez (ECE)
ASTRO 2001-02
Systems engineering, control
Norapon Tangtrongcitt (ECE), Elana Blatt (ORIE)
Open Control Platform 2001-02
Embedded software architectures for UAV’s
Greg Foo (ECE)
Object Agent Linux Testbed 2001-02
Embedded software architectures for satellite clusters
Prasant Jagannath (ECE)
Undergraduate Projects and Students: Autonomous robotics research 2012-2013
human robot interaction, cooperative autonomous robots
Ke Hu (CS), Gene Shin (CS), Ben Jaeger (CS), Richard Quan (ECE), Josh Sun (ECE), Conan Lao (MAE), Kai Wang (MAE), Ahmed Elsamadisi (MAE), Theo Park (MAE), Art Sullivan (MAE), Michael Ndubuisi (CS)
CU-Air 2012
Air to Air communication Sam Fischer, Scott Schlacter
Autonomous robotics research 2011-2012
human robot interaction, cooperative autonomous robots
Cordelia Lee (ECE), Gaomin Deng (CS), Ahmed Elsamadisi (CS), Theo Park (CS), Rei Suzuki (MAE), Chuqi (Alex) Wang (ECE), Lijia Wang (MAE), Zhaoxin (John) Yin (MAE), Gene Shin (CS), Richard Quan (ECE), Abdullah Sayeem (MAE),
Autonomous robotics Quad rotor control, human Nyk Lotocky (CS), Jason Moran (MAE),
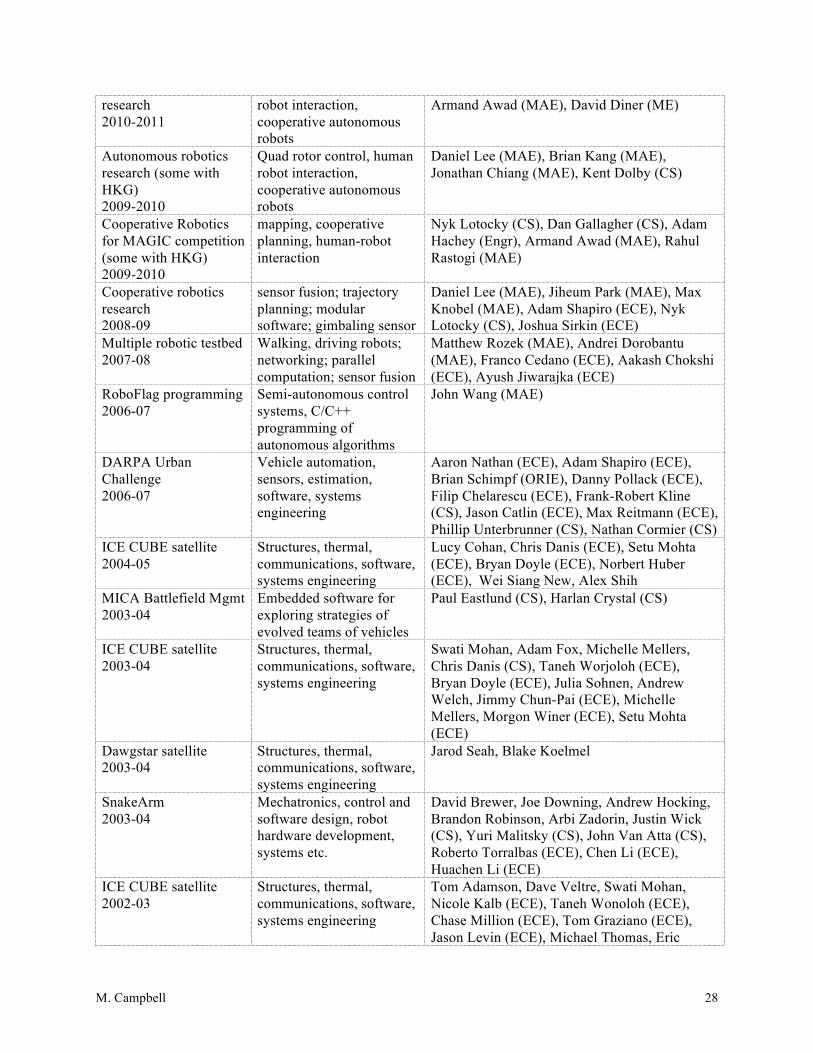
M. Campbell 28
research 2010-2011
robot interaction, cooperative autonomous robots
Armand Awad (MAE), David Diner (ME)
Autonomous robotics research (some with HKG) 2009-2010
Quad rotor control, human robot interaction, cooperative autonomous robots
Daniel Lee (MAE), Brian Kang (MAE), Jonathan Chiang (MAE), Kent Dolby (CS)
Cooperative Robotics for MAGIC competition (some with HKG) 2009-2010
mapping, cooperative planning, human-robot interaction
Nyk Lotocky (CS), Dan Gallagher (CS), Adam Hachey (Engr), Armand Awad (MAE), Rahul Rastogi (MAE)
Cooperative robotics research 2008-09
sensor fusion; trajectory planning; modular software; gimbaling sensor
Daniel Lee (MAE), Jiheum Park (MAE), Max Knobel (MAE), Adam Shapiro (ECE), Nyk Lotocky (CS), Joshua Sirkin (ECE)
Multiple robotic testbed 2007-08
Walking, driving robots; networking; parallel computation; sensor fusion
Matthew Rozek (MAE), Andrei Dorobantu (MAE), Franco Cedano (ECE), Aakash Chokshi (ECE), Ayush Jiwarajka (ECE)
RoboFlag programming 2006-07
Semi-autonomous control systems, C/C++ programming of autonomous algorithms
John Wang (MAE)
DARPA Urban Challenge 2006-07
Vehicle automation, sensors, estimation, software, systems engineering
Aaron Nathan (ECE), Adam Shapiro (ECE), Brian Schimpf (ORIE), Danny Pollack (ECE), Filip Chelarescu (ECE), Frank-Robert Kline (CS), Jason Catlin (ECE), Max Reitmann (ECE), Phillip Unterbrunner (CS), Nathan Cormier (CS)
ICE CUBE satellite 2004-05
Structures, thermal, communications, software, systems engineering
Lucy Cohan, Chris Danis (ECE), Setu Mohta (ECE), Bryan Doyle (ECE), Norbert Huber (ECE), Wei Siang New, Alex Shih
MICA Battlefield Mgmt 2003-04
Embedded software for exploring strategies of evolved teams of vehicles
Paul Eastlund (CS), Harlan Crystal (CS)
ICE CUBE satellite 2003-04
Structures, thermal, communications, software, systems engineering
Swati Mohan, Adam Fox, Michelle Mellers, Chris Danis (CS), Taneh Worjoloh (ECE), Bryan Doyle (ECE), Julia Sohnen, Andrew Welch, Jimmy Chun-Pai (ECE), Michelle Mellers, Morgon Winer (ECE), Setu Mohta (ECE)
Dawgstar satellite 2003-04
Structures, thermal, communications, software, systems engineering
Jarod Seah, Blake Koelmel
SnakeArm 2003-04
Mechatronics, control and software design, robot hardware development, systems etc.
David Brewer, Joe Downing, Andrew Hocking, Brandon Robinson, Arbi Zadorin, Justin Wick (CS), Yuri Malitsky (CS), John Van Atta (CS), Roberto Torralbas (ECE), Chen Li (ECE), Huachen Li (ECE)
ICE CUBE satellite 2002-03
Structures, thermal, communications, software, systems engineering
Tom Adamson, Dave Veltre, Swati Mohan, Nicole Kalb (ECE), Taneh Wonoloh (ECE), Chase Million (ECE), Tom Graziano (ECE), Jason Levin (ECE), Michael Thomas, Eric
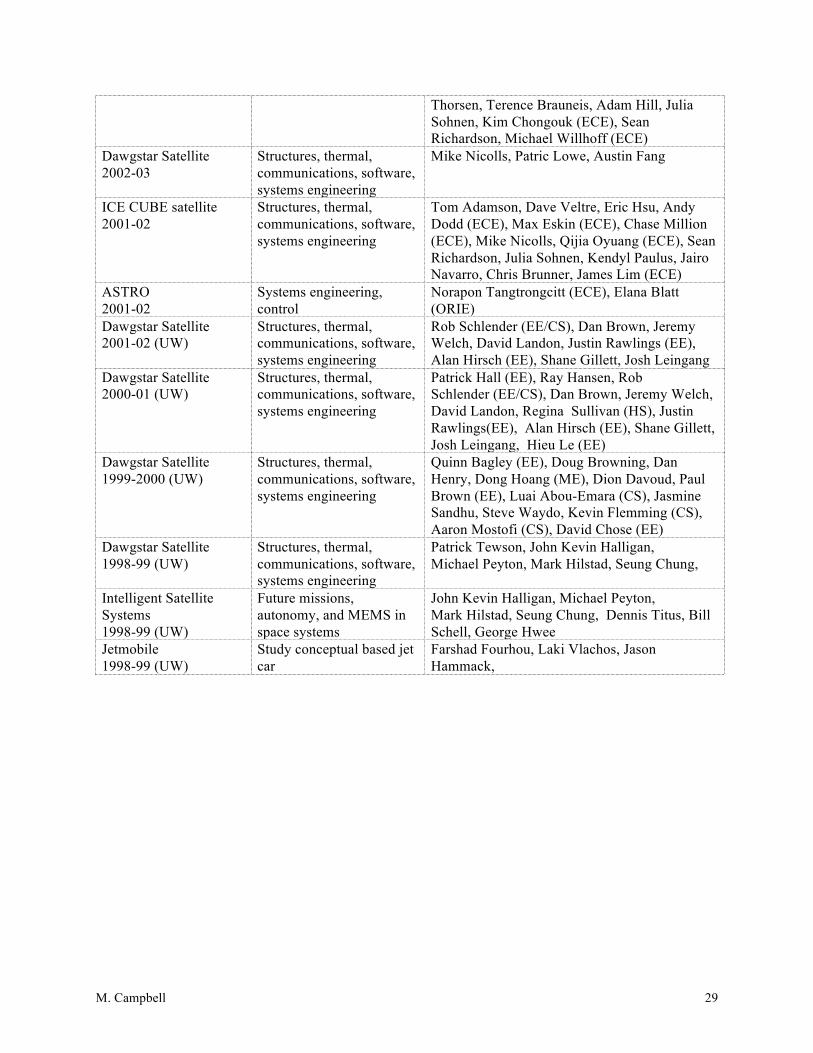
M. Campbell 29
Thorsen, Terence Brauneis, Adam Hill, Julia Sohnen, Kim Chongouk (ECE), Sean Richardson, Michael Willhoff (ECE)
Dawgstar Satellite 2002-03
Structures, thermal, communications, software, systems engineering
Mike Nicolls, Patric Lowe, Austin Fang
ICE CUBE satellite 2001-02
Structures, thermal, communications, software, systems engineering
Tom Adamson, Dave Veltre, Eric Hsu, Andy Dodd (ECE), Max Eskin (ECE), Chase Million (ECE), Mike Nicolls, Qijia Oyuang (ECE), Sean Richardson, Julia Sohnen, Kendyl Paulus, Jairo Navarro, Chris Brunner, James Lim (ECE)
ASTRO 2001-02
Systems engineering, control
Norapon Tangtrongcitt (ECE), Elana Blatt (ORIE)
Dawgstar Satellite 2001-02 (UW)
Structures, thermal, communications, software, systems engineering
Rob Schlender (EE/CS), Dan Brown, Jeremy Welch, David Landon, Justin Rawlings (EE), Alan Hirsch (EE), Shane Gillett, Josh Leingang
Dawgstar Satellite 2000-01 (UW)
Structures, thermal, communications, software, systems engineering
Patrick Hall (EE), Ray Hansen, Rob Schlender (EE/CS), Dan Brown, Jeremy Welch, David Landon, Regina Sullivan (HS), Justin Rawlings(EE), Alan Hirsch (EE), Shane Gillett, Josh Leingang, Hieu Le (EE)
Dawgstar Satellite 1999-2000 (UW)
Structures, thermal, communications, software, systems engineering
Quinn Bagley (EE), Doug Browning, Dan Henry, Dong Hoang (ME), Dion Davoud, Paul Brown (EE), Luai Abou-Emara (CS), Jasmine Sandhu, Steve Waydo, Kevin Flemming (CS), Aaron Mostofi (CS), David Chose (EE)
Dawgstar Satellite 1998-99 (UW)
Structures, thermal, communications, software, systems engineering
Patrick Tewson, John Kevin Halligan, Michael Peyton, Mark Hilstad, Seung Chung,
Intelligent Satellite Systems 1998-99 (UW)
Future missions, autonomy, and MEMS in space systems
John Kevin Halligan, Michael Peyton, Mark Hilstad, Seung Chung, Dennis Titus, Bill Schell, George Hwee
Jetmobile 1998-99 (UW)
Study conceptual based jet car
Farshad Fourhou, Laki Vlachos, Jason Hammack,





























