CS559: Computer Graphics Lecture 12: OpenGL - Transformation Li
Zhang Spring 2008 Today Transformation in OpenGL Reading Chapter 3
Last time glPolygonMode(GLenum face, GLenum mode); face: GL_FRONT,
GL_BACK mode: GL_POINT, GL_LINE, GL_FILL Primitive Details
glPolygonMode(GL_FRONT, GL_FILL); glRectf(0, 0, 100, 100);
glPolygonMode(GL_FRONT, GL_FILL); glRectf(0, 0, 100, 100);
glPolygonMode(GL_BACK, GL_LINE); glRectf(0, 0, 100, 100);
glPolygonMode(GL_BACK, GL_LINE); glRectf(0, 0, 100, 100); Primitive
Details Determine Polygon Orientation P4P4 P3P3 P2P2 P1P1 Q4Q4 Q3Q3
Q2Q2 Q1Q1 x y Orientation == sign of the area Icosahedron Normal
Vectors Icosahedron //initial icosahedron Static float t[20][3][3]
= {}; void display(void) { } //initial icosahedron Static float
t[20][3][3] = {}; void display(void) { } Icosahedron //initial
icosahedron Static float t[20][3][3] = {}; void display(void) {
//clear buffer //set up viewport and frustum if (animation)
angle+=0.3; if (angle>360) angle-=360.0; glLoadIdentity();
glRotatef(angle,1,0,1); } //initial icosahedron Static float
t[20][3][3] = {}; void display(void) { //clear buffer //set up
viewport and frustum if (animation) angle+=0.3; if (angle>360)
angle-=360.0; glLoadIdentity(); glRotatef(angle,1,0,1); }
Icosahedron //initial icosahedron Static float t[20][3][3] = {};
void display(void) { //clear buffer //set up viewport and frustum
if (animation) angle+=0.3; if (angle>360) angle-=360.0;
glLoadIdentity(); glRotatef(angle,1,0,1); // subdivide each face of
the triangle for (int i = 0; i < 20; i++) { Subdivide(t[i][0],
t[i][1], t[i][2], subdiv); } //initial icosahedron Static float
t[20][3][3] = {}; void display(void) { //clear buffer //set up
viewport and frustum if (animation) angle+=0.3; if (angle>360)
angle-=360.0; glLoadIdentity(); glRotatef(angle,1,0,1); //
subdivide each face of the triangle for (int i = 0; i < 20; i++)
{ Subdivide(t[i][0], t[i][1], t[i][2], subdiv); } Icosahedron
//initial icosahedron Static float t[20][3][3] = {}; void
display(void) { //clear buffer //set up viewport and frustum if
(animation) angle+=0.3; if (angle>360) angle-=360.0;
glLoadIdentity (); glRotatef(angle,1,0,1); // subdivide each face
of the triangle for (int i = 0; i < 20; i++) {
Subdivide(t[i][0], t[i][1], t[i][2], subdiv); } glFlush();
glutSwapBuffers(); } //initial icosahedron Static float t[20][3][3]
= {}; void display(void) { //clear buffer //set up viewport and
frustum if (animation) angle+=0.3; if (angle>360) angle-=360.0;
glLoadIdentity (); glRotatef(angle,1,0,1); // subdivide each face
of the triangle for (int i = 0; i < 20; i++) {
Subdivide(t[i][0], t[i][1], t[i][2], subdiv); } glFlush();
glutSwapBuffers(); } Icosahedron void Subdivide(GLfloat v1[3],
GLfloat v2[3], GLfloat v3[3], int depth) { } void Subdivide(GLfloat
v1[3], GLfloat v2[3], GLfloat v3[3], int depth) { } Icosahedron
void Subdivide(GLfloat v1[3], GLfloat v2[3], GLfloat v3[3], int
depth) { if (depth == 0) { glColor3f(0.5,0.5,0.5);
glBegin(GL_TRIANGLES); glVertex3fv(v1); glVertex3fv(v2);
glVertex3fv(v3); glEnd(); } void Subdivide(GLfloat v1[3], GLfloat
v2[3], GLfloat v3[3], int depth) { if (depth == 0) {
glColor3f(0.5,0.5,0.5); glBegin(GL_TRIANGLES); glVertex3fv(v1);
glVertex3fv(v2); glVertex3fv(v3); glEnd(); } Icosahedron void
Subdivide(GLfloat v1[3], GLfloat v2[3], GLfloat v3[3], int depth) {
if (depth == 0) { glColor3f(0.5,0.5,0.5); glBegin(GL_TRIANGLES);
glVertex3fv(v1); glVertex3fv(v2); glVertex3fv(v3); glEnd(); } else
{ GLfloat v12[3], v23[3], v31[3]; for (int i = 0; i < 3; i++) {
v12[i] = (v1[i]+v2[i])/2.0; v23[i] = (v2[i]+v3[i])/2.0; v31[i] =
(v3[i]+v1[i])/2.0; } Normalize(v12); Normalize(v23);
Normalize(v31); } void Subdivide(GLfloat v1[3], GLfloat v2[3],
GLfloat v3[3], int depth) { if (depth == 0) {
glColor3f(0.5,0.5,0.5); glBegin(GL_TRIANGLES); glVertex3fv(v1);
glVertex3fv(v2); glVertex3fv(v3); glEnd(); } else { GLfloat v12[3],
v23[3], v31[3]; for (int i = 0; i < 3; i++) { v12[i] =
(v1[i]+v2[i])/2.0; v23[i] = (v2[i]+v3[i])/2.0; v31[i] =
(v3[i]+v1[i])/2.0; } Normalize(v12); Normalize(v23);
Normalize(v31); } Icosahedron void Subdivide(GLfloat v1[3], GLfloat
v2[3], GLfloat v3[3], int depth) { if (depth == 0) {
glColor3f(0.5,0.5,0.5); glBegin(GL_TRIANGLES); glVertex3fv(v1);
glVertex3fv(v2); glVertex3fv(v3); glEnd(); } else { GLfloat v12[3],
v23[3], v31[3]; for (int i = 0; i < 3; i++) { v12[i] =
(v1[i]+v2[i])/2.0; v23[i] = (v2[i]+v3[i])/2.0; v31[i] =
(v3[i]+v1[i])/2.0; } Normalize(v12); Normalize(v23);
Normalize(v31); Subdivide(v1, v12, v31, depth-1); Subdivide(v2,
v23, v12, depth-1); Subdivide(v3, v31, v23, depth-1);
Subdivide(v12, v23, v31, depth-1); } void Subdivide(GLfloat v1[3],
GLfloat v2[3], GLfloat v3[3], int depth) { if (depth == 0) {
glColor3f(0.5,0.5,0.5); glBegin(GL_TRIANGLES); glVertex3fv(v1);
glVertex3fv(v2); glVertex3fv(v3); glEnd(); } else { GLfloat v12[3],
v23[3], v31[3]; for (int i = 0; i < 3; i++) { v12[i] =
(v1[i]+v2[i])/2.0; v23[i] = (v2[i]+v3[i])/2.0; v31[i] =
(v3[i]+v1[i])/2.0; } Normalize(v12); Normalize(v23);
Normalize(v31); Subdivide(v1, v12, v31, depth-1); Subdivide(v2,
v23, v12, depth-1); Subdivide(v3, v31, v23, depth-1);
Subdivide(v12, v23, v31, depth-1); } So far Fixed Camera location
=> Change Camera location Single object => Multiple objects
Examples of multiple objects 3D Geometry Pipeline Model Space
(Object Space) World Space Eye Space (View Space) Canonical View
Space Screen Space (2D) Image Space (pixels) Raster Space 3D
Geometry Pipeline Model Space (Object Space) World Space Eye Space
(View Space) Model Transformation Screen Space (2D) View
Transformation Image Space (pixels) Raster Space 3D Geometry
Pipeline Model Space (Object Space) Eye Space (View Space) Model
View Transformation Screen Space (2D) Image Space (pixels) Raster
Space View port Transformation Projection 3D Geometry Pipeline
Model Space (Object Space) Eye Space (View Space) Model View
Transformation Screen Space (2D) Image Space (pixels) Raster Space
View port Transformation Projection glMatrixMode(GL_MODELVIEW)
glLoadIdentity(); glRotate(); glMatrixMode(GL_MODELVIEW)
glLoadIdentity(); glRotate(); glMatrixMode(GL_Projection)
glLoadIdentity(); glFrustum(); glMatrixMode(GL_Projection)
glLoadIdentity(); glFrustum(); glViewport(); Cube.cpp Event-Driven
Programming Window management library GLUT / FLTK Window management
library GLUT / FLTK Events: key strokes, mouse clicks Event
handlers: mouse(), display(), reshape() Event handlers: mouse(),
display(), reshape() Cube.cpp int main(int argc, char** argv) {
glutInit(&argc, argv); glutInitDisplayMode (GLUT_SINGLE |
GLUT_RGB); glutInitWindowSize (500, 500); glutInitWindowPosition
(100, 100); glutCreateWindow (argv[0]); init ();
glutDisplayFunc(display); glutReshapeFunc(reshape);
glutKeyboardFunc(keyboard); glutMainLoop(); return 0; } int
main(int argc, char** argv) { glutInit(&argc, argv);
glutInitDisplayMode (GLUT_SINGLE | GLUT_RGB); glutInitWindowSize
(500, 500); glutInitWindowPosition (100, 100); glutCreateWindow
(argv[0]); init (); glutDisplayFunc(display);
glutReshapeFunc(reshape); glutKeyboardFunc(keyboard);
glutMainLoop(); return 0; } void keyboard(unsigned char key, int x,
int y) { switch (key) { case 27: //correspond to ESC exit(0);
break; } void keyboard(unsigned char key, int x, int y) { switch
(key) { case 27: //correspond to ESC exit(0); break; } Cube.cpp int
main(int argc, char** argv) { glutInit(&argc, argv);
glutInitDisplayMode (GLUT_SINGLE | GLUT_RGB); glutInitWindowSize
(500, 500); glutInitWindowPosition (100, 100); glutCreateWindow
(argv[0]); init (); glutDisplayFunc(display);
glutReshapeFunc(reshape); glutKeyboardFunc(keyboard);
glutMainLoop(); return 0; } int main(int argc, char** argv) {
glutInit(&argc, argv); glutInitDisplayMode (GLUT_SINGLE |
GLUT_RGB); glutInitWindowSize (500, 500); glutInitWindowPosition
(100, 100); glutCreateWindow (argv[0]); init ();
glutDisplayFunc(display); glutReshapeFunc(reshape);
glutKeyboardFunc(keyboard); glutMainLoop(); return 0; } void
reshape (int w, int h) { glViewport(0, 0, w, h);
glMatrixMode(GL_PROJECTION); glLoadIdentity(); glFrustum(-1.0, 1.0,
-1.0, 1.0, 1.5, 20.0); } void reshape (int w, int h) {
glViewport(0, 0, w, h); glMatrixMode(GL_PROJECTION);
glLoadIdentity(); glFrustum(-1.0, 1.0, -1.0, 1.0, 1.5, 20.0); }
Cube.cpp int main(int argc, char** argv) { glutInit(&argc,
argv); glutInitDisplayMode (GLUT_SINGLE | GLUT_RGB);
glutInitWindowSize (500, 500); glutInitWindowPosition (100, 100);
glutCreateWindow (argv[0]); init (); glutDisplayFunc(display);
glutReshapeFunc(reshape); glutKeyboardFunc(keyboard);
glutMainLoop(); return 0; } int main(int argc, char** argv) {
glutInit(&argc, argv); glutInitDisplayMode (GLUT_SINGLE |
GLUT_RGB); glutInitWindowSize (500, 500); glutInitWindowPosition
(100, 100); glutCreateWindow (argv[0]); init ();
glutDisplayFunc(display); glutReshapeFunc(reshape);
glutKeyboardFunc(keyboard); glutMainLoop(); return 0; } void
display(void) { glClear(GL_COLOR_BUFFER_BIT); glColor3f(1.0, 1.0,
1.0); glMatrixMode(GL_MODELVIEW); glLoadIdentity(); /* clear the
matrix */ /* viewing transformation */ gluLookAt(0.0, 0.0, 5.0,
0.0, 0.0, 0.0, 0.0, 1.0, 0.0); glScalef(1.0, 2.0, 1.0); /* modeling
transformation */ glutWireCube(1.0); glFlush(); } void
display(void) { glClear(GL_COLOR_BUFFER_BIT); glColor3f(1.0, 1.0,
1.0); glMatrixMode(GL_MODELVIEW); glLoadIdentity(); /* clear the
matrix */ /* viewing transformation */ gluLookAt(0.0, 0.0, 5.0,
0.0, 0.0, 0.0, 0.0, 1.0, 0.0); glScalef(1.0, 2.0, 1.0); /* modeling
transformation */ glutWireCube(1.0); glFlush(); } Modeling
Transformation glTranslatef(float x, float y, float z)
glRotatef(float angle, float x, float y, float z) glScalef(2.0,
-0.5, 1.0) glScalef(float x, float y, float z) General Modeling
Transform glLoadIdentify() glLoadMatrixf(float *M)
glMultiMatrixf(float *M) double M[4][4]; M[2][1] corresponds to???
M[10] Matrix Chain glMatrixMode(GL_MODELVIEW); glLoadIdentity();
glMultMatrixf(N); /* apply transformation N */ glMultMatrixf(M); /*
apply transformation M */ glMultMatrixf(L); /* apply transformation
L */ glBegin(GL_POINTS); glVertex3f(v); /* draw transformed vertex
v */ glEnd(); /* which is (N*(M*(L*v))) */
glMatrixMode(GL_MODELVIEW); glLoadIdentity(); glMultMatrixf(N); /*
apply transformation N */ glMultMatrixf(M); /* apply transformation
M */ glMultMatrixf(L); /* apply transformation L */
glBegin(GL_POINTS); glVertex3f(v); /* draw transformed vertex v */
glEnd(); /* which is (N*(M*(L*v))) */ Matrix Chain
glMatrixMode(GL_MODELVIEW); glLoadIdentity(); glMultMatrixf(V);
glMultMatrixf(R); glMultMatrixf(T); glBegin(GL_POINTS);
glVertex3f(v); glEnd(); glMatrixMode(GL_MODELVIEW);
glLoadIdentity(); glMultMatrixf(V); glMultMatrixf(R);
glMultMatrixf(T); glBegin(GL_POINTS); glVertex3f(v); glEnd();
glMatrixMode(GL_MODELVIEW); glLoadIdentity(); gluLookat();
glRotatef(); glTranslatef(); glBegin(GL_POINTS); glVertex3f(v);
glEnd(); glMatrixMode(GL_MODELVIEW); glLoadIdentity(); gluLookat();
glRotatef(); glTranslatef(); glBegin(GL_POINTS); glVertex3f(v);
glEnd(); gluLookAt gluLookAt( float eyex, float eyey, float eyez,
float px, float py, float pz, float upx, float upy, float upz )
gluLookAt( float eyex, float eyey, float eyez, float px, float py,
float pz, float upx, float upy, float upz ) 1.Give eye location e
2.Give target position p 3.Give upward direction u gluLookAt
glFrustum glFrustum(double left, double right, double bottom,
double top, double near, double far) gluPerspective
gluPerspective(double fovy, double aspect, double zNear, double
zFar) gluPerspective Orthographic Projection glOrtho(double left,
double right, double bottom, double top, double near, double far);
Viewport Transformation glViewport(int x, int y, int width, int
height); glFrustum(double left, double right, double bottom, double
top, double near, double far) gluPerspective(double fovy, double
aspect, double zNear, double zFar) glFrustum(double left, double
right, double bottom, double top, double near, double far)
gluPerspective(double fovy, double aspect, double zNear, double
zFar) Revisit cube.cpp int main(int argc, char** argv) {
glutInit(&argc, argv); glutInitDisplayMode (GLUT_SINGLE |
GLUT_RGB); glutInitWindowSize (500, 500); glutInitWindowPosition
(100, 100); glutCreateWindow (argv[0]); init ();
glutDisplayFunc(display); glutReshapeFunc(reshape);
glutKeyboardFunc(keyboard); glutMainLoop(); return 0; } int
main(int argc, char** argv) { glutInit(&argc, argv);
glutInitDisplayMode (GLUT_SINGLE | GLUT_RGB); glutInitWindowSize
(500, 500); glutInitWindowPosition (100, 100); glutCreateWindow
(argv[0]); init (); glutDisplayFunc(display);
glutReshapeFunc(reshape); glutKeyboardFunc(keyboard);
glutMainLoop(); return 0; } void reshape (int w, int h) {
glViewport(0, 0, w, h); glMatrixMode(GL_PROJECTION);
glLoadIdentity(); glFrustum(-1.0, 1.0, -1.0, 1.0, 1.5, 20.0); }
void reshape (int w, int h) { glViewport(0, 0, w, h);
glMatrixMode(GL_PROJECTION); glLoadIdentity(); glFrustum(-1.0, 1.0,
-1.0, 1.0, 1.5, 20.0); } void display(void) {
glClear(GL_COLOR_BUFFER_BIT); glColor3f(1.0, 1.0, 1.0);
glMatrixMode(GL_MODELVIEW); glLoadIdentity(); /* clear the matrix
*/ /* viewing transformation */ gluLookAt(0.0, 0.0, 5.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0); glScalef(1.0, 2.0, 1.0); /* modeling
transformation */ glutWireCube(1.0); glFlush(); } void
display(void) { glClear(GL_COLOR_BUFFER_BIT); glColor3f(1.0, 1.0,
1.0); glMatrixMode(GL_MODELVIEW); glLoadIdentity(); /* clear the
matrix */ /* viewing transformation */ gluLookAt(0.0, 0.0, 5.0,
0.0, 0.0, 0.0, 0.0, 1.0, 0.0); glScalef(1.0, 2.0, 1.0); /* modeling
transformation */ glutWireCube(1.0); glFlush(); } Connecting
primitives glLoadIdentity(); draw_block_A(); glTranslate(0, h, 0);
Draw_block_B(); glLoadIdentity(); draw_block_A(); glTranslate(0, h,
0); Draw_block_B(); glLoadIdentity(); draw_block_A();
glTranslate(0, h, 0); glRotate(-90, 0, 0, 1); Draw_block_B();
glLoadIdentity(); draw_block_A(); glTranslate(0, h, 0);
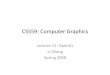
glRotate(-90, 0, 0, 1); Draw_block_B(); A B 3D Example: A robot arm
Consider this robot arm with 3 degrees of freedom: Base rotates
about its vertical axis by Upper arm rotates in its xy-plane by
Lower arm rotates in its xy-plane by h1h1 h2h2 h3h3 Base Upper arm
Lower arm Q: What matrix do we use to transform the base to the
world? R_y( ) Q: What matrix for the upper arm to the base?
T(0,h1,0)R_z( ) Q: What matrix for the lower arm to the upper arm?
T(0,h2,0)R_z( ) z x y x y x Robot arm implementation The robot arm
can be displayed by keeping a global matrix and computing it at
each step: Matrix M_model; display(){... robot_arm();... }
robot_arm() { M_model = R_y(theta); base(); M_model =
R_y(theta)*T(0,h1,0)*R_z(phi); upper_arm(); M_model =
R_y(theta)*T(0,h1,0)*R_z(phi)*T(0,h2,0)*R_z(psi); lower_arm(); }
Matrix M_model; display(){... robot_arm();... } robot_arm() {
M_model = R_y(theta); base(); M_model =
R_y(theta)*T(0,h1,0)*R_z(phi); upper_arm(); M_model =
R_y(theta)*T(0,h1,0)*R_z(phi)*T(0,h2,0)*R_z(psi); lower_arm(); } Do
the matrix computations seem wasteful? How to translate the whole
robot? Q: What matrix do we use to transform the base to the world?
R_y( ) Q: What matrix for the upper arm to the base? T(0,h1,0)R_z(
) Q: What matrix for the lower arm to the upper arm? T(0,h2,0)R_z(
) Q: What matrix do we use to transform the base to the world? R_y(
) Q: What matrix for the upper arm to the base? T(0,h1,0)R_z( ) Q:
What matrix for the lower arm to the upper arm? T(0,h2,0)R_z( )
Instead of recalculating the global matrix each time, we can just
update it in place by concatenating matrices on the right: Robot
arm implementation, better Matrix M_model; display(){... M_model =
identity; robot_arm();... } robot_arm() { M_model *= R_y(theta);
base(); M_model *= T(0,h1,0)*R_z(phi); upper_arm(); M_model *=
T(0,h2,0)*R_z(psi); lower_arm(); } Matrix M_model; display(){...
M_model = identity; robot_arm();... } robot_arm() { M_model *=
R_y(theta); base(); M_model *= T(0,h1,0)*R_z(phi); upper_arm();
M_model *= T(0,h2,0)*R_z(psi); lower_arm(); } OpenGL maintains the
model-view matrix, as a global state variable which is updated by
concatenating matrices on the right. display() {... glMatrixMode(
GL_MODELVIEW ); glLoadIdentity(); robot_arm();... } robot_arm() {
glRotatef( theta, 0.0, 1.0, 0.0 ); base(); glTranslatef( 0.0, h1,
0.0 ); glRotatef( phi, 0.0, 0.0, 1.0 ); lower_arm(); glTranslatef(
0.0, h2, 0.0 ); glRotatef( psi, 0.0, 0.0, 1.0 ); upper_arm(); }
display() {... glMatrixMode( GL_MODELVIEW ); glLoadIdentity();
robot_arm();... } robot_arm() { glRotatef( theta, 0.0, 1.0, 0.0 );
base(); glTranslatef( 0.0, h1, 0.0 ); glRotatef( phi, 0.0, 0.0, 1.0
); lower_arm(); glTranslatef( 0.0, h2, 0.0 ); glRotatef( psi, 0.0,
0.0, 1.0 ); upper_arm(); } Robot arm implementation, OpenGL
Hierarchical modeling Hierarchical models can be composed of
instances using trees: edges contain geometric transformations
nodes contain geometry (and possibly drawing attributes) How might
we draw the tree for the robot arm? A complex example: human figure
Q: Whats the most sensible way to traverse this tree? Human figure
implementation, OpenGL figure() { torso(); glPushMatrix();
glTranslate(... ); glRotate(... ); head(); glPopMatrix();
glPushMatrix(); glTranslate(... ); glRotate(... );
left_upper_arm(); glPushMatrix(); glTranslate(... ); glRotate(...
); left_lower_arm(); glPopMatrix();... } figure() { torso();
glPushMatrix(); glTranslate(... ); glRotate(... ); head();
glPopMatrix(); glPushMatrix(); glTranslate(... ); glRotate(... );
left_upper_arm(); glPushMatrix(); glTranslate(... ); glRotate(...
); left_lower_arm(); glPopMatrix();... }