Embed Size (px)
Citation preview
CS 450: COMPUTER GRAPHICS
QUATERNIONSSPRING 2015
DR. MICHAEL J. REALE
INTRODUCTION
• Quaternions invented by Sir William Rowan Hamilton in 1843
• Developed as extension to complex numbers
• Introduced into computer graphics by Ken Shoemake in 1985
• Very good for rotation transformations better than Euler angles because:
• Straightforward to convert to and from quaternions
• Stable and constant interpolation of orientations
http://commons.wikimedia.org/wiki/File%3AWilliam_Rowan_Hamilton_portrait_oval_combined.png
COMPLEX NUMBERS
• Complex number = 2 part real + imaginary part
• A + iB
• Imaginary number i = sqrt(-1)
SO WHAT IS A QUATERNION?
• Quaternion = has 4 parts
• First 3 parts imaginary vector (each component uses a different imaginary number)
• Last part real part of quaternion
• In practice, stored as a 4D vector of real numbers (but usually put little hat on name)
kjiij
jikki
ikjjk
kji
qqqkqjqiqq
qqqkqjqiqqqq
zyxzyxv
wvwzyxwv
1
),,(
),(ˆ
222
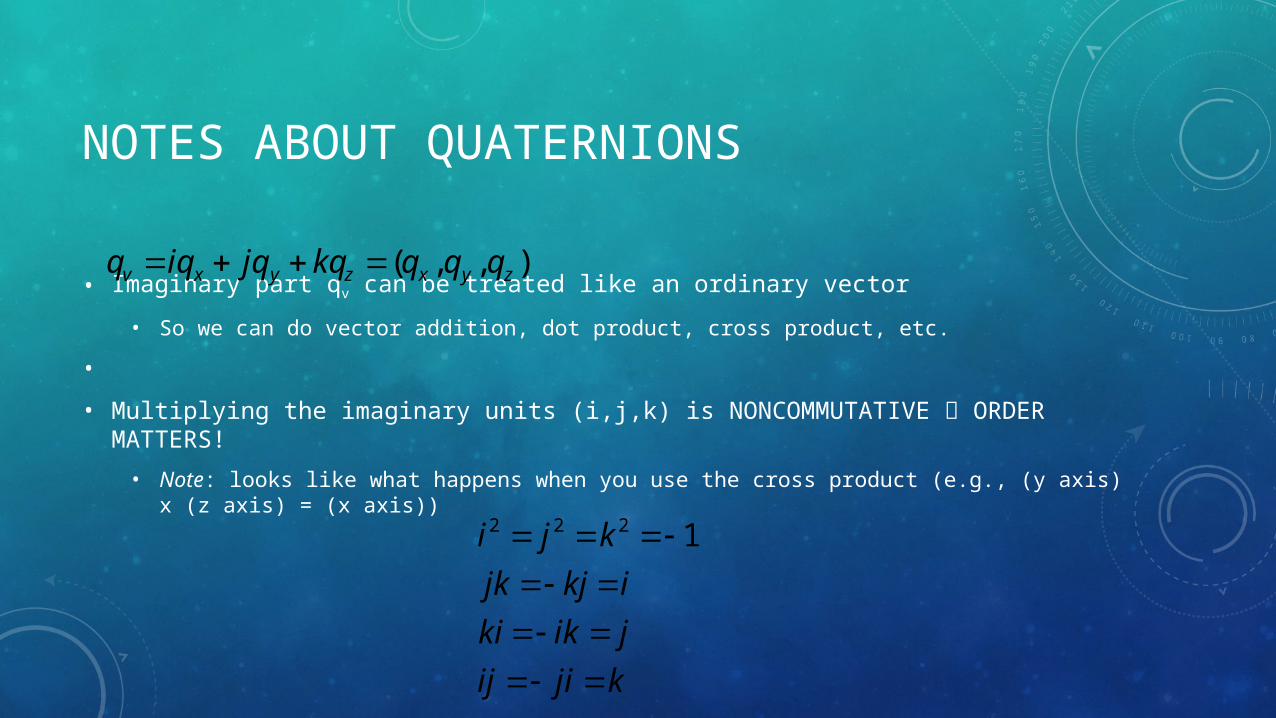
NOTES ABOUT QUATERNIONS
• Imaginary part qv can be treated like an ordinary vector
• So we can do vector addition, dot product, cross product, etc.
•
• Multiplying the imaginary units (i,j,k) is NONCOMMUTATIVE ORDER MATTERS!
• Note: looks like what happens when you use the cross product (e.g., (y axis) x (z axis) = (x axis))
kjiij
jikki
ikjjk
kji
1222
),,( zyxzyxv qqqkqjqiqq
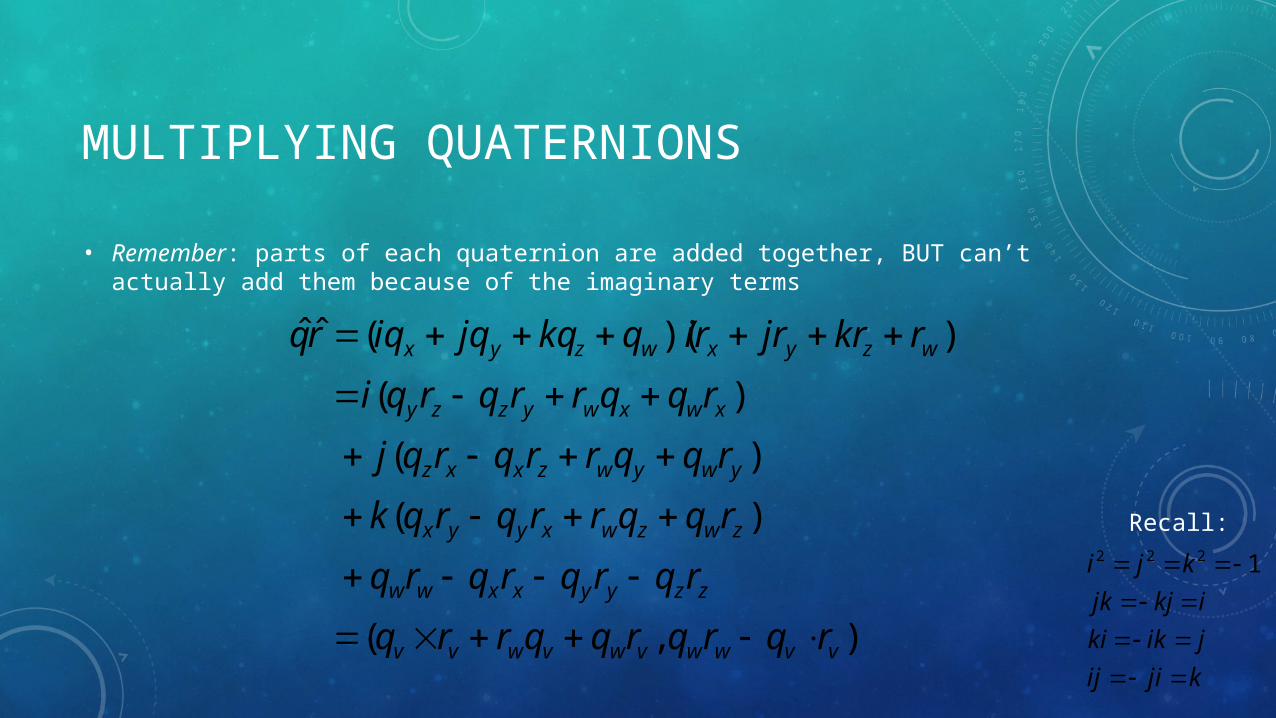
MULTIPLYING QUATERNIONS
• Remember: parts of each quaternion are added together, BUT can’t actually add them because of the imaginary terms
) ,(
)(
)(
)(
))((ˆˆ
vvwwvwvwvv
zzyyxxww
zwzwxyyx
ywywzxxz
xwxwyzzy
wzyxwzyx
rqrqrqqrrq
rqrqrqrq
rqqrrqrqk
rqqrrqrqj
rqqrrqrqi
rkrjrirqkqjqiqrq
kjiij
jikki
ikjjk
kji
1222
Recall:
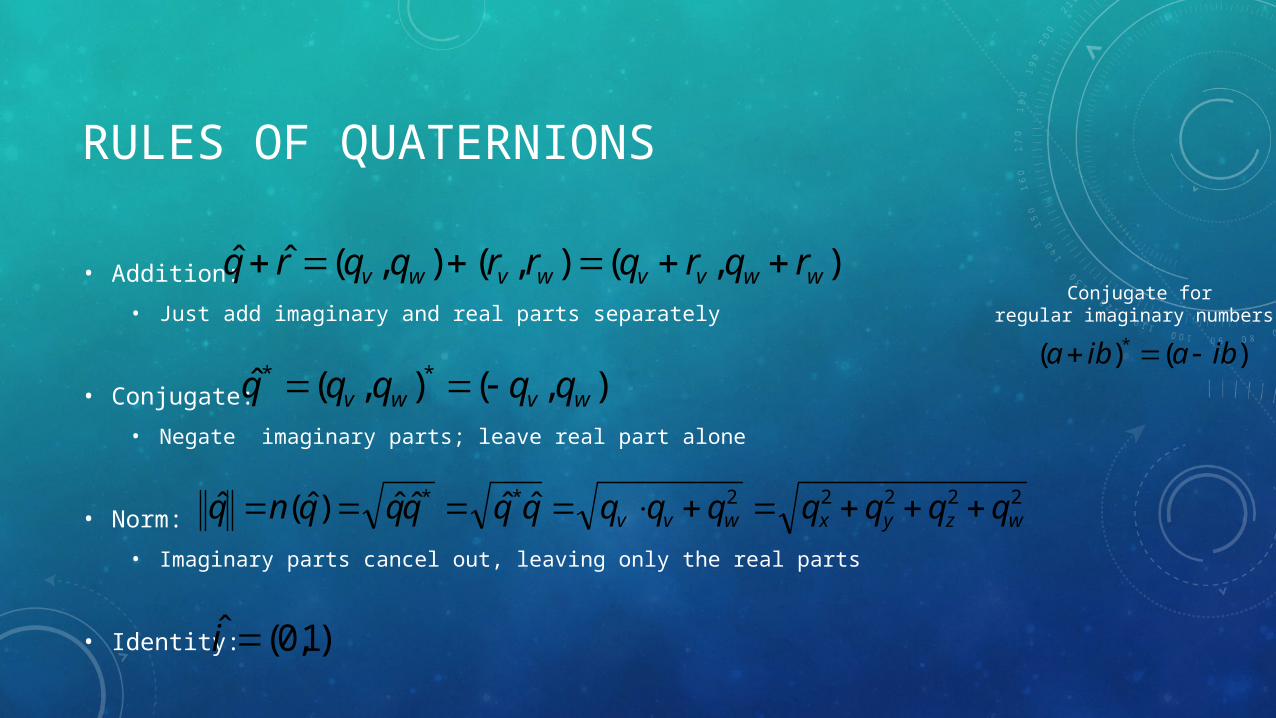
RULES OF QUATERNIONS
• Addition:
• Just add imaginary and real parts separately
• Conjugate:
• Negate imaginary parts; leave real part alone
• Norm:
• Imaginary parts cancel out, leaving only the real parts
• Identity:
),(),(),(ˆˆ wwvvwvwv rqrqrrqqrq
),(),(ˆ **wvwv qqqqq
)()( * ibaiba
Conjugate forregular imaginary numbers:
22222** ˆˆˆˆ)ˆ(ˆ wzyxwvv qqqqqqqqqqqqnq
)1,0(ˆ
i
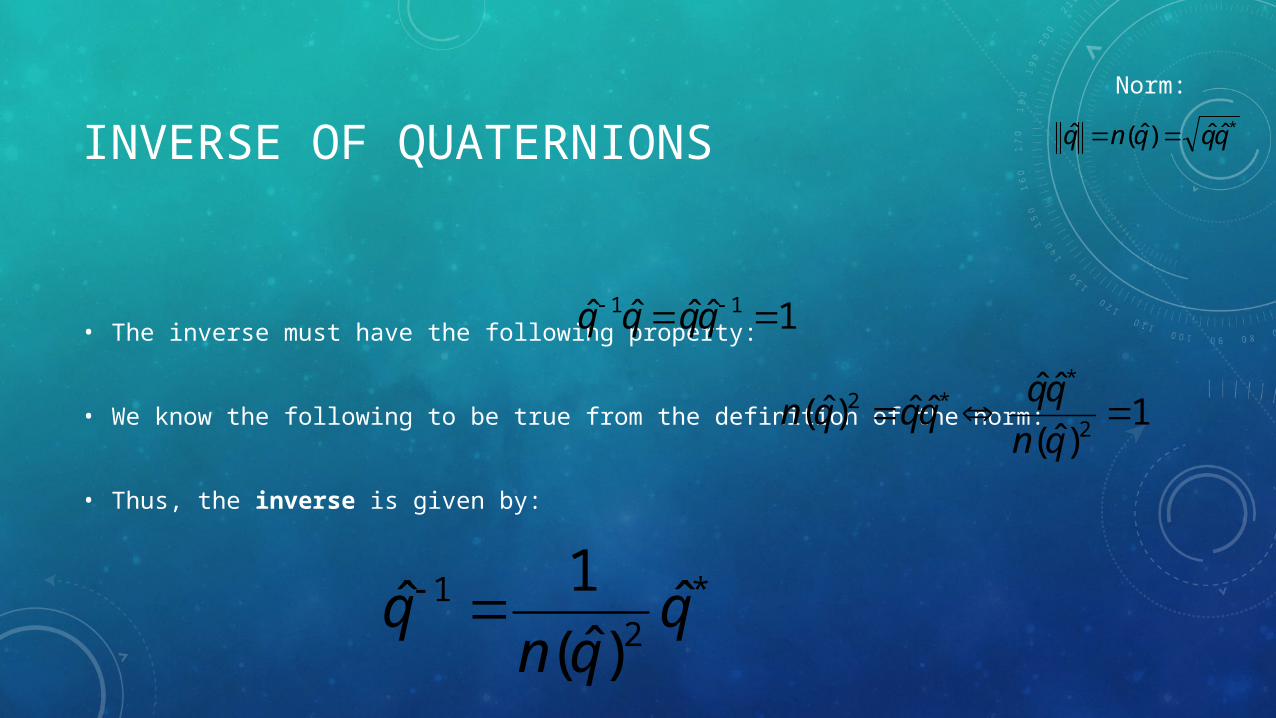
INVERSE OF QUATERNIONS
• The inverse must have the following property:
• We know the following to be true from the definition of the norm:
• Thus, the inverse is given by:
1ˆˆˆˆ 11 qqqq
1)ˆ(
ˆˆˆˆ)ˆ(
2
**2
qn
qqqqqn
*ˆˆ)ˆ(ˆ qqqnq
Norm:
*2
1 ˆ)ˆ(
1ˆ q
qnq
SCALAR MULTIPLICATION
• To multiply a scalar s by a quaternion:
• Also, it is commutative:
),()0,00(),)(,0(ˆ wvvwwvvwv sqsqqsqqsqqqqsqs
),(ˆˆ wv sqsqsqqs
UNIT QUATERNION
• Unit quaternion
• Another way to write this is:
• This works because:
• …only works if:
1)ˆ( such that ),(ˆ qnqqq wv
1such that vector 3D a is where
cos)(sin)cos,)((sinˆ
uu
uuq
1cossincos))((sin)cos,)((sin)ˆ( 2222 qqq uuunqn
21)( qqq uuu
EULER’S FORMULA
• Turns out that sine, cosine, i, and e are all related by Euler’s Formula:
• The equivalent for quaternions is:
• We’ll use this later…
iei sincos
Aside: when φ = π, getEuler’s Identity!
01ie
quq euq cos)(sinˆ
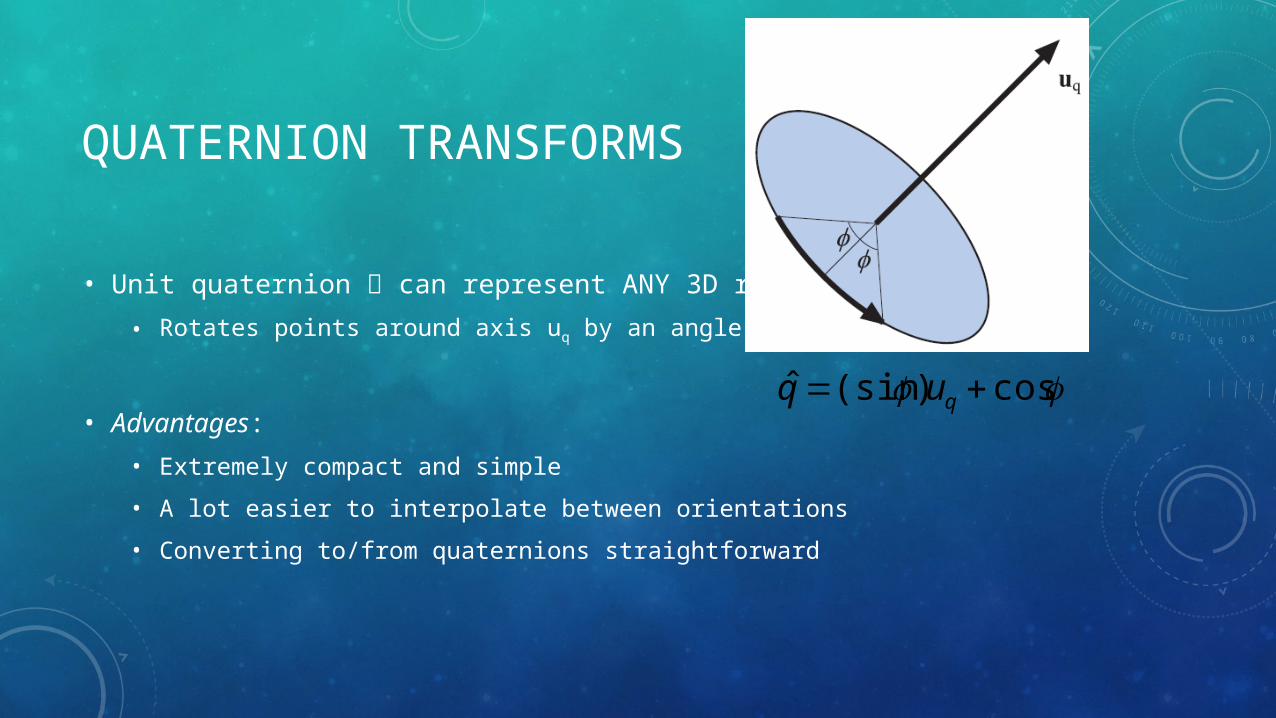
QUATERNION TRANSFORMS
• Unit quaternion can represent ANY 3D rotation!
• Rotates points around axis uq by an angle 2φ
• Advantages:
• Extremely compact and simple
• A lot easier to interpolate between orientations
• Converting to/from quaternions straightforward
cos)(sinˆ quq
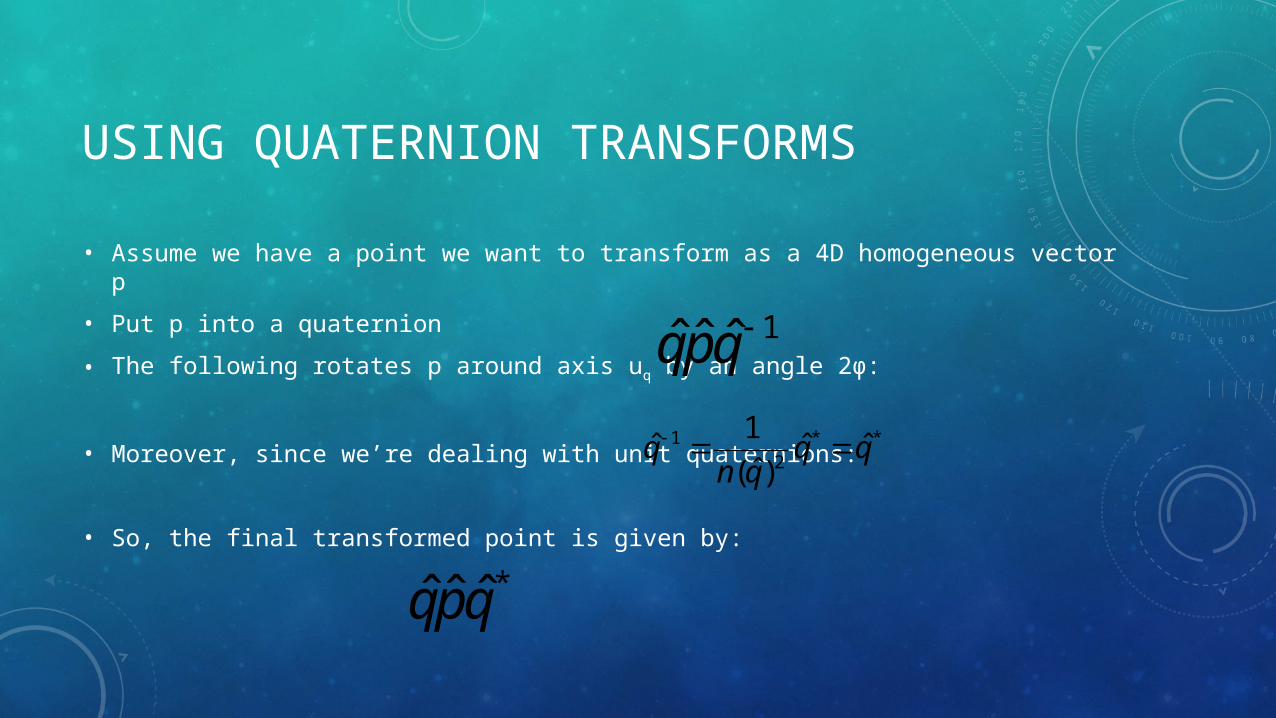
USING QUATERNION TRANSFORMS
• Assume we have a point we want to transform as a 4D homogeneous vector p
• Put p into a quaternion
• The following rotates p around axis uq by an angle 2φ:
• Moreover, since we’re dealing with unit quaternions:
• So, the final transformed point is given by:
1ˆˆˆ qpq
**2
1 ˆˆ)ˆ(
1ˆ qq
qnq
*ˆˆˆ qpq
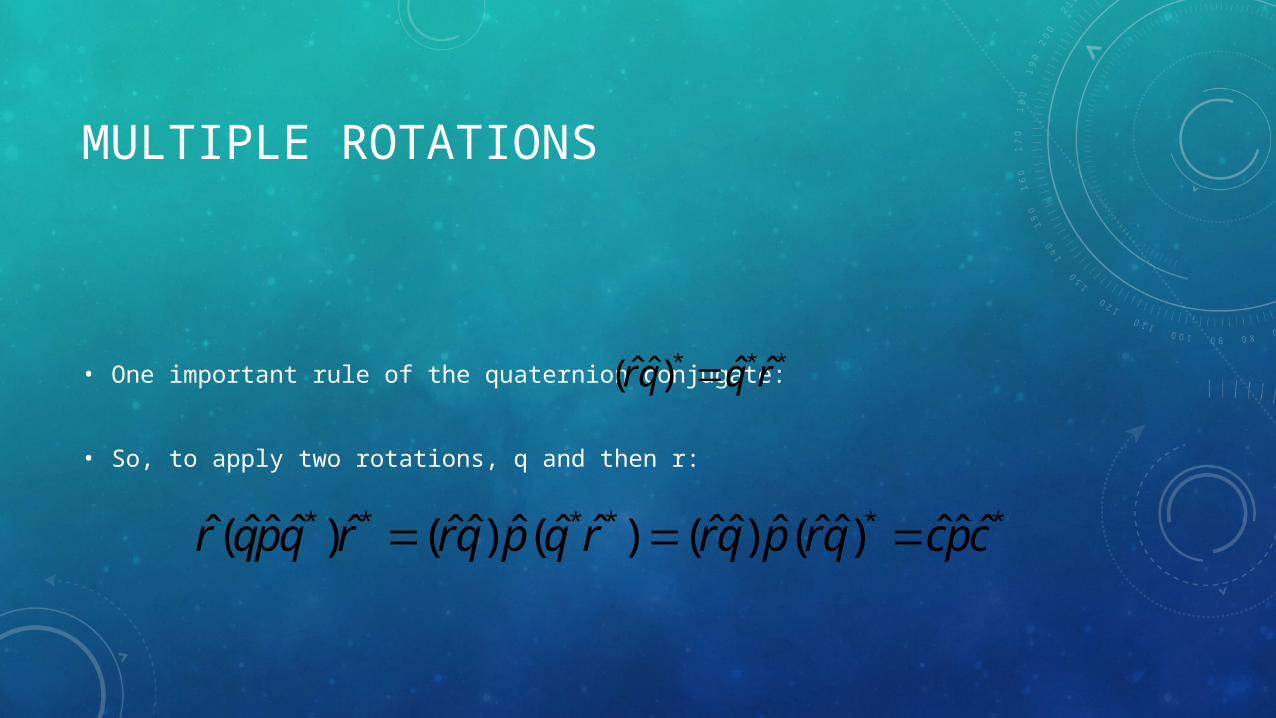
MULTIPLE ROTATIONS
• One important rule of the quaternion conjugate:
• So, to apply two rotations, q and then r:
****** ˆˆˆ)ˆˆ(ˆ)ˆˆ()ˆˆ(ˆ)ˆˆ(ˆ)ˆˆˆ(ˆ cpcqrpqrrqpqrrqpqr
*** ˆˆ)ˆˆ( rqqr
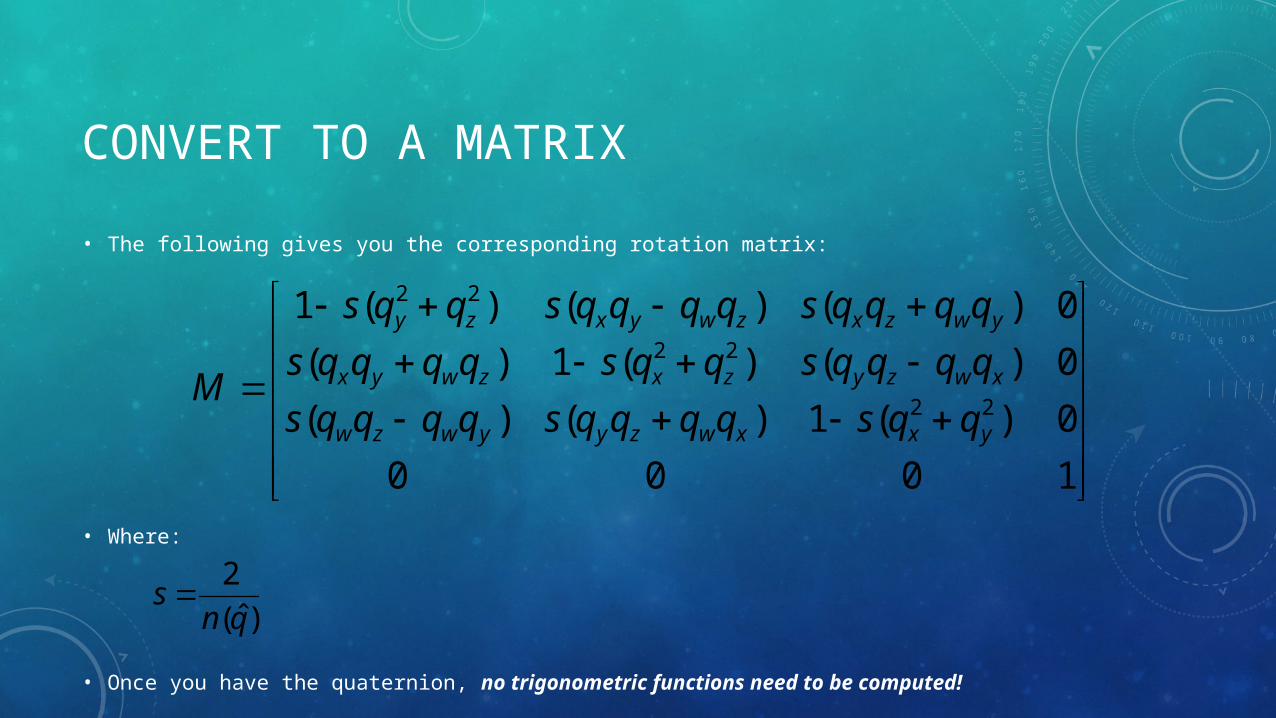
CONVERT TO A MATRIX
• The following gives you the corresponding rotation matrix:
• Where:
• Once you have the quaternion, no trigonometric functions need to be computed!
1000
0)(1)()(
0)()(1)(
0)()()(1
22
22
22
yxxwzyywzw
xwzyzxzwyx
ywzxzwyxzy
qqsqqqqsqqqqs
qqqqsqqsqqqqs
qqqqsqqqqsqqs
M
)ˆ(
2
qns
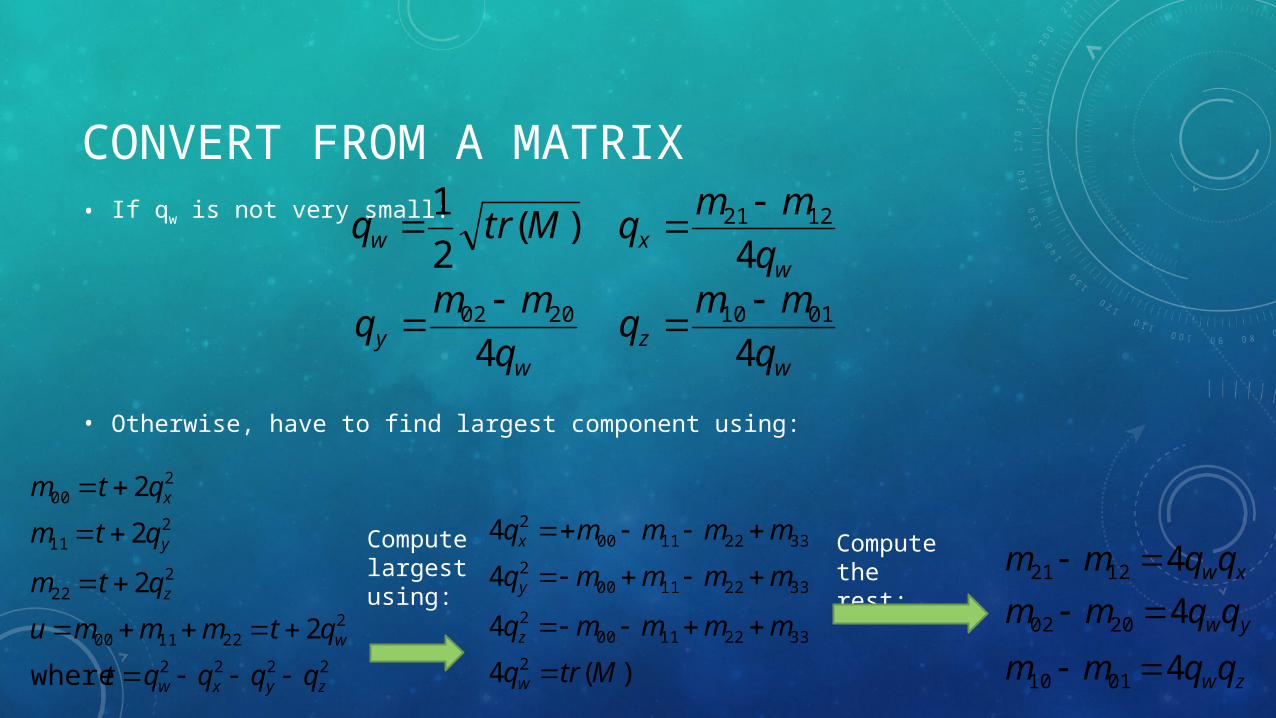
CONVERT FROM A MATRIX• If qw is not very small:
• Otherwise, have to find largest component using:
wz
wy
wxw
q
mmq
q
mmq
q
mmqMtrq
44
4)(
2
1
01102002
1221
2222
2221100
222
211
200
where
2
2
2
2
zyxw
w
z
y
x
qqqqt
qtmmmu
qtm
qtm
qtm
)(4
4
4
4
2
332211002
332211002
332211002
Mtrq
mmmmq
mmmmq
mmmmq
w
z
y
x
Compute largest using:
zw
yw
xw
qqmm
qqmm
qqmm
4
4
4
0110
2002
1221
Compute the
rest:
SPHERICAL LINEAR INTERPOLATION
• Spherical Linear Interpolation = given two unit quaternions, q and r, and a parameter t ([0,1]), computes an interpolated quaternion
• Useful for animation
• Less useful for camera orientations can tilt camera’s “up” vector
• Mathematically expressed as:qqrtrqs t ˆ)ˆˆ(),ˆ,ˆ(ˆ 1
)cos()sin(
cos)(sinˆ
tut
euq
q
tutq
t q
Power law for quaternions:
SLERP()
• Software implementation, slerp(), often uses this form:
• To get φ:
• There are, however, faster incremental approaches that avoid the trigonometric functions
rt
qt
trqslerptrqs ˆsin
)sin(ˆ
sin
))1(sin(),ˆ,ˆ(),ˆ,ˆ(ˆ
wwzzyyxx rqrqrqrq cos
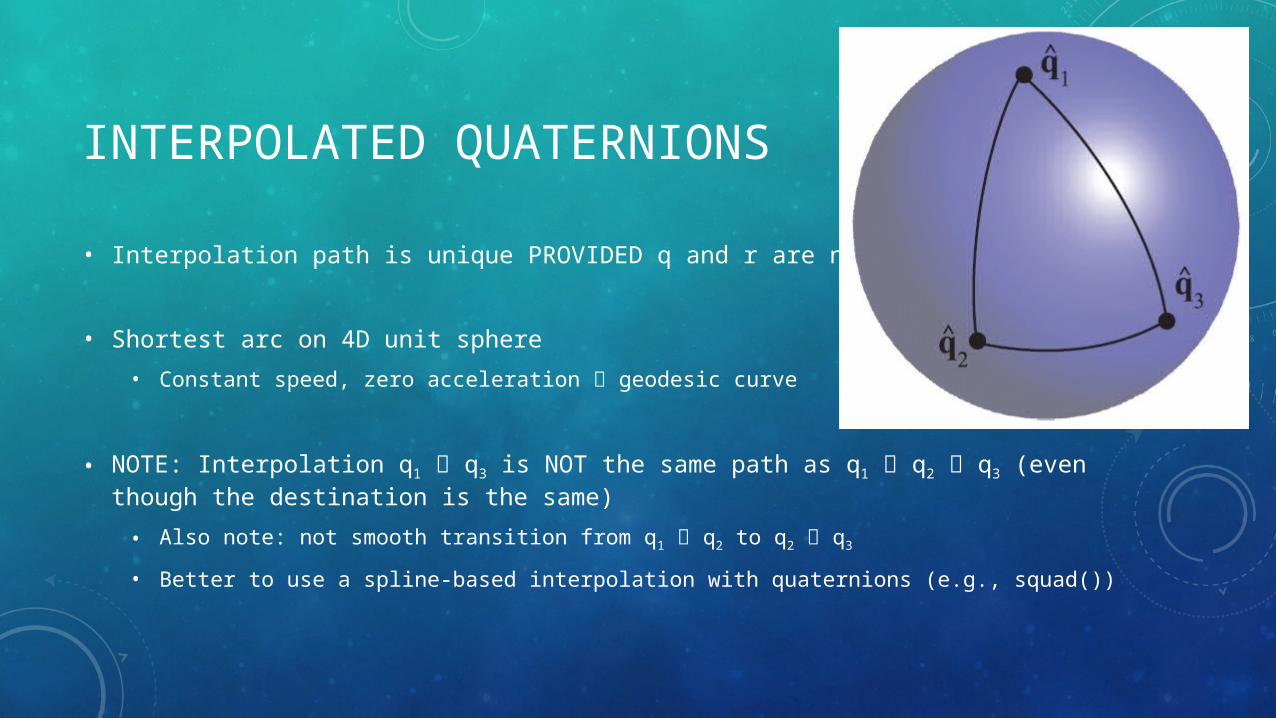
INTERPOLATED QUATERNIONS
• Interpolation path is unique PROVIDED q and r are not exact opposites
• Shortest arc on 4D unit sphere
• Constant speed, zero acceleration geodesic curve
• NOTE: Interpolation q1 q3 is NOT the same path as q1 q2 q3 (even though the destination is the same)
• Also note: not smooth transition from q1 q2 to q2 q3
• Better to use a spline-based interpolation with quaternions (e.g., squad())
TRANSFORMING FROM ONE VECTOR TO ANOTHER
• You can also directly transform from one direction s to another direction t using the shortest path possible
• Normalize s and t
• Compute normalized rotation axis using cross product:
• Compute dot product:
• Get length of cross product:
• Quaternion we want:
• Using half-angle relations and some simplifications:
tstsu /)(
)2cos( tse
)2sin( ts
cos,)(sinˆ uq
2
)1(2),(
)1(2
1ˆ
ets
eq
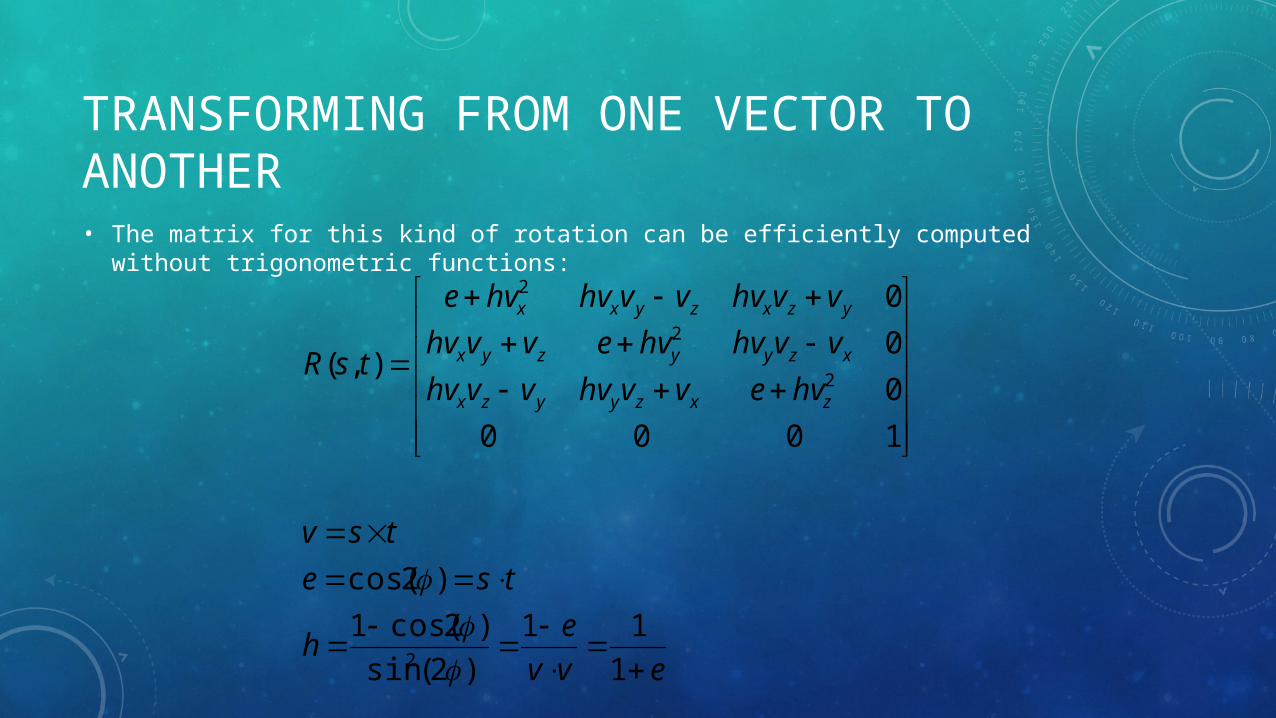
TRANSFORMING FROM ONE VECTOR TO ANOTHER• The matrix for this kind of rotation can be efficiently computed without trigonometric functions:
evv
eh
tse
tsv
hvevvhvvvhv
vvhvhvevvhv
vvhvvvhvhve
tsRzxzyyzx
xzyyzyx
yzxzyxx
1
11
)2(sin
)2cos(1
)2cos(
1000
0
0
0
),(
2
2
2
2
TRANSFORMING FROM ONE VECTOR TO ANOTHER
• NOTE: Need to detect when s and t point in:
• Exactly same direction return identity matrix/quaternion
• Exactly opposite directions pick any axis of rotation





























