-
Crowd Motion Capture
Nicolas CourtySamsara/VALORIA/Université de Bretagne Sud
Campus de Tohannic56000 Vannes, France
[email protected]
Thomas CorpettiCOSTEL/Université de Haute-Bretagne
Place du Recteur Henri Le Moal35043 Rennes, France
[email protected]
ABSTRACTIn this paper a new and original technique to animate
acrowd of human beings is presented. Following the successof
data-driven animation models (such as motion capture)in the context
of articulated figures control, we propose toderivate a similar
type of approach for crowd motions. Inour framework, the motion of
the crowds are represented asa time series of velocity fields
estimated from a video of areal crowd. This time series is used as
an input of a sim-ple animation model that ”advect” people along
this time-varying flow. We demonstrate the power of our technique
onboth synthetic and real examples of crowd videos. We
alsointroduce the notions of crowd motion editing and
presentpossible extensions to our work.
Categories and Subject DescriptorsI.3.7 [Computer Graphics]:
Three-Dimensional Graphicsand Realism - Animation; I.6.8
[Simulation and Model-ing]: Types of Simulation - Animation
KeywordsCrowd simulation, data-driven animation, vision-based
tech-niques for computer animation, motion estimation
1. INTRODUCTIONCrowds of people exhibit particular and subtle
behaviorswhose complexity reflects the complex nature of human
be-ings. Animating crowds are usually a tedious task for an-imators
who rely most of the time on simulation models.Achieving particular
effects with global emergent crowd be-haviors from such models
appear to be very tricky, since an-imators usually only have
control on specific characteristicsof the crowd members. In the
context of human-like figuresanimation, huge progress have been
observed with the use ofmotion capture. Using motions acquired from
real perform-ers is now common, and modifying them through a
varietyof editing operations brings substantial benefits in terms
ofcontrol and realism in the produced animation. The aim of
our technique is to adapt such a methodology in the contextof
crowd animation. This raises an opened set of questions:
• what kind of descriptors will best represent crowd mo-tions
?
• how to capture/estimate them from real situations ?
• how to apply/use them as an input for an
interactive,parameterizable animation system ?
• and finally is it possible to edit those captured motionsin
order to produce new motions ?
We chose to use crowd videos as input data because they
arerelatively easy to capture and do not require invasive
tech-niques such as markers that are impractical in the presenceof
thousands of individuals. At first it sounds temptatingto track
singular pedestrians into the flow of people. We ar-gue that,
despite the technical difficulties to achieve such atask, this
approach fails in describing the crowd behavior asa whole (but may
as well succeed in characterizing individ-ual specific behaviors).
Conversely, our framework is basedon the assumption that the
motions of individuals withinthe crowd is the expression of a
continuous flow that drivesthe crowd motion. This assumes that the
crowd is denseenough so that pedestrians are considered as markers
of anunderlying flow. In this sense, our method is more related
tomacroscopic simulation models (that try to define an
overallstructure to the crowd’s motions) rather than
microscopicmodels (that define the crowd’s motions as an emergent
be-havior of the sum of individual displacement strategies).
Overview of the data-driven animation system. Ourmethodology
relies on an analysis/synthesis scheme whichis depicted in Figure
1. First, images are extracted froma video of a real crowd. From
all the pairs of successiveimages a vector field is computed
through a motion estima-tion process. The concatenation of all
these vector fieldsrepresent a time series which accounts for the
displacementof the whole crowd along time. This ends up the
analysispart. The synthesis of a new crowd animation is done
byadvecting particles (the pedestrians) along this time
varyingflow.
This paper is divided as follow: Section 2 presents relatedwork
in the context of crowd simulation as well as motionestimation.
Section 3 deals with the estimator used in our
-
Figure 1: Overview of the whole process
methodology, and Section 4 presents the integration of themotion
descriptor in a crowd animation controller, as wellas possible ways
to edit the captured motions. The last twosections present results
obtained with our method along witha conclusion and perspectives
for our work.
2. STATE OF THE ARTData-driven animation techniques usually
require means toextract information from the real world. In the
presenceof rigid motions such as character motions, marker
basedtechniques bring the best results because only a few
motionparameters have to be considered. In the context of non-rigid
motions such as facial parameters, fluids flows,
animalgaits/behaviors or tree structures, video-based
techniqueshave already been considered in the literature [1, 2, 3,
4,5]. Simulating crowds from real videos is closely related tothis
topic, but yet is different because of the choice of themotion
descriptor (time varying vector fields). Such a de-scription has
been previously considered in a general anima-tion system, Flow
tiles [6], but the author did not considerthat the flow tiles could
be designed from real data. In [?],Brogan et al succesfully
performed statistics on capturedhuman walking paths and derived
from them a new pathplanning model. In order to motivate a
data-driven anima-tion scheme for crowd animation we first present
the state ofthe art works in crowd animation, then we introduce
somegeneral issues in the motion estimation problem.
2.1 Crowd simulationCrowd behavior and motion of virtual people
have beenstudied and modeled for several purposes ranging from
movieproduction to the simulation of emergency situations or
thedesign of buildings and open-spaces. The state of the artin
human crowd behavioral modeling is large and can beclassified in
two main approaches: microscopic and macro-scopic models. The
models belonging to the first categorydescribe the time-space
behavior of individual pedestrianswhereas the second category
describe the emergent prop-erties of the crowd. The simplest models
of microscopicsimulation are based on cellular automata [7, 8].
Dynamicsystems have also been considered by Helbing in his
popularsocial force model [9]. It consists in expressing the motion
ofeach pedestrian as a result of a combination of social
forces,that repel/attract pedestrians toward each others. It
hasbeen shown that this model generates realistic phenomenasuch as
arc formations in exits or increasing evacuation timewith increased
desired evacuation velocities. It has been ex-
tended to account for individualities [10] or the presence
oftoxic gases in the environment [11]. More complex modelsconsider
each member of the crowd as autonomous pedestri-ans endowed with
perceptive and cognitive abilities [12, 13,14, 15]. Those models
exhibit a variety of results dependingon the quality of the
behavior design. Such models may leadto incorrect emergent global
behaviors. Those difficultiescan be avoided by using a continuum
formulation [16, 17].Equations using the concepts of fluid
mechanics have beenderived in order to model such approach of human
crowds.Those approaches rely on the assumption that the
charac-teristic distance scale between individuals is much less
thanthe characteristic distance scale of the region in which
theindividuals move [16]. As such, the density of the crowd hasto
be taken into account for those models to be pertinent.Finally
several hypotheses on the behavior of each membersof the crowd lead
to partial derivative equations governingthe flow of people.
Although crowds are made up of independent individualswith their
own objectives and behavior patterns, the behav-ior of crowds is
widely understood to have collective charac-teristics which can be
described in general terms. Though,macroscopic models may lack of
subtleties and often rely onstrong hypotheses (notably on density).
Our framework pro-pose to capture this global dynamic from real
crowd videosequences. This imposes the use of motion estimation
tech-niques.
2.2 Motion estimationTracking a very short number of people and
using their mo-tions in a computer animation system has previously
beeninvestigated by Somasundaram and Parent in [?]. When acrowd is
dense enough, usual tracking systems like Kalmanfilters or
stochastic filtering [18, ?, ?] generate large statespace that
yields a computationally expensive problem. Itis then necessary to
use alternative methods to obtain theinformation on the dynamics of
the crowd in order to charac-terize its behavior. The idea of using
optical flow to estimatecrowd motions has recently drawn attention
in the contextof human activity recognition [19]. This section
investigatesthe most popular ways to estimate the motion from
imagesequences.
From the panel of available approaches, almost all of themare
based on the well-known Optical-Flow Constraint Equa-tion (ofce):
it assumes the visible points conserve roughlytheir intensity in
the course of a displacement. This reads:
dE(x, t)
dt=∂E(x, t)
∂t+ ∇E(x, t) · v(x, t) ≈ 0, (1)
where v(x, t) = (u, v)T is the unknown velocity field at timet
and location x = (x, y) in the image plane Ω, E(x, t) be-ing the
image brightness, viewed for a while as a continuousfunction. It is
known that this assumption is subject to theaperture problem: in
homogeneous areas, the latter equa-tion is undetermined and there
exist an infinity of solutions.A number of approaches have hence
been proposed to copethis problem and to obtain the optical flow
under the ofceconstraint (see for instance [20] for a survey). In
the follow-ing, we list the most popular ones.Correlation: these
techniques are based on the researchof a window that is similar
(w.r.t the ofce) to a window
-
centered at position x. The displacement associated corre-sponds
to a peak of the correlation surface. Very efficientimplementations
of such approaches can be obtained in theFourier space but these
techniques suffer from a lack of con-sistency (from a spatial point
of view) and some known lim-itations of such approaches [21]
prevent from a comfortableuse.Parametric models: the idea is to
cope the aperture prob-lem by using a parametric model Θ to
represent the velocityin the image (v(x) = Θx). The model can be
obtained byminimizing:
Θ = minΘ
ZΩ
„∂E(x, t)
∂t+ ∇E(x, t) ·Θx
«2. (2)
Such techniques are very efficient when one has a reliable
apriori knowledge on the flow to estimate but this representa-tion
strongly limits the possibility of estimating the motionin a number
of various situations.Lucas & Kanade: Lucas and Kanade [22]
assumed thatthe unknown optic flow vector is constant within some
neigh-borhood of size n. Hence, the motion field v can be
esti-mated by minimizing the function:Z
Ω
Kn ∗„∂E(x, t)
∂t+ ∇E(x, t) · v(x, t)
«2(3)
where the Gaussian Kernel Kn tends in fact to
eliminatehomogeneous areas. The main drawback of this approach
isits incapacity of estimating local measurements.Optical Flow: In
the seminal work of Horn & Schunck[24], the authors proposed to
solve the ofce by adding aspatial regularization constraint. The
motion field is thenobtained by minimizing:Z
Ω
„∂E(x, t)
∂t+ ∇E(x, t) · v(x, t)
«2+ α
ZΩ
f2(v),
(4)
where f is a smoothing function and α a parameter to fix.In the
original work, the authors proposed a first order spa-tial
smoothing term: f(v) = ‖∇u‖2 + ‖∇v‖2 that assumesa spatial
coherency of the motion field. This penalty termis based on the
idea that all points of the same rigid objecthave a similar motion.
Unfortunately, in presence of discon-tinuities, this term is not
adapted as it smooth out the fron-tiers. The two last decades, many
authors have proposedsome regularizations of the type f(v) = g(‖u‖)
+ g(‖v‖)where g is a robust function to define. Its objective is to
ex-tract a piecewise smooth motion field while preserving
thediscontinuities (see for instance [25, 26]).
3. CROWD ESTIMATION AND REPRESEN-TATION
In this section we present our motion estimation techniquealong
with necessary post-processing treatments that en-hance both the
quality of the signal as well as its compact-ness.
3.1 Motion estimationIt has been shown in [21] that a penalty
term based on afirst order smoothing f(v) = ‖∇u‖2 + ‖∇v‖2 is
equivalent,
from a minimization point of view, to the minimization of:ZΩ
div2(v) + curl2(v)dx (5)
where div(v) = ∂u/∂x+∂v/∂y and curl(v) = ∂v/∂x−∂u/∂yare
respectively the divergence and the vorticity of the
flow.Therefore, a classic smoothing term minimize areas that
ex-hibit high values of divergence and/or vorticity. Such kindof
motions descriptors are issued from fluid mechanics andare also
very useful to characterize a crowd phenomenon:the divergence
represents a dispersion while the vorticity islinked to a walk
around an obstacle. Some studies haveactually proved that a crowd
dense enough has sometimesa behavior that can be explained by some
fluid mechanicslaws [16]. It is then of primary interest to
integrate suchprior knowledge in the optical flow to obtain a
techniquedevoted to crowd motion. In particular, it is important
tomeasure precisely the divergence and the vorticity from realdata
to perform an accurate synthesis of the observed phe-nomenon. In
this paper, we then prefer to rely on a div-curlsmoothing term that
extract more precisely those two com-ponents of the flow [21]. The
new smoothing function f isthen f(v) = ‖∇div v‖2 + ‖∇curl v‖2. Such
a penalizationtries to preserve areas that contain high values of
divergenceand/or vorticity.
3.2 Motion post-processingIn practice, the real sequences of
crowds are composed of ahigh number of images (between 250(≈ 10sec)
and 1500(≈1min)). This results in an important number of
instanta-neous dense motion fields. Under the assumption that
thepedestrians are some ”tracers” of the underlying flow
thattransport them, the information contained by all the
instan-taneous motion fields is redundant. Moreover, some
loca-tions of the images are pedestrian-free (only the backgroundis
visualized); in the time series this results in some noisyareas
where the corresponding displacements are computedonly with the
help of the spatial-regularization. In such sit-uations, from an
image to an other, there is no warrantythat the flow is consistent
from a temporal point of view.This results in noisy time series, as
depicted in the greensignal of figure 5. According to these
remarks, it is thenof primary interest to i) reduce this huge
amount of dataand ii) de-noise the time series. To that end, we
suggest toexploit some properties of the Fourier
transformation.Fourier transformation Following the Fourier
transform,any discrete signal of size T can be represented into a
seriesof T growing frequency components. The lowest
frequencyrepresents the mean of the signal; the lower frequencies
rep-resent its small variations; higher frequencies are linked
tohigh variations whereas very high values represent noises.It is
then important to reconstruct a signal by removing itshigher
frequencies in order to de-noise it. Concerning thereduction of
dimension, the figure 2 represents the error ofreconstruction of a
complete sequence of motion fields infunction of the number of
frequencies used to reconstruct it.It is shown than if we take a
few number of frequencies (lessthan 10%), the reconstruction is
fairly accurate.
4. DATA-DRIVEN ANIMATION OF CROWDSOnce the time series of motion
fields has been computed,it is possible to consider this
information as input data for
-
Figure 2: Error of reconstruction. In this example, theoriginal
signal contain 641 frequencies. The reconstruc-
tion error continuously decreases and if one takes 50 fre-
quencies (less than 8%), the error becomes lower than
5%
a data-driven crowd animation system. We first presentin this
section a simple model to compute crowd motionsfrom these time
series (Motion synthesis). We then exhibittwo possible techniques
to edit/modify those data (Motionediting).
4.1 Motion synthesisLet us first recall that the computed
velocities correspondto a velocity in the image space, and our goal
is to animatepedestrians in the virtual world space. Given the
positionof such a person in the virtual world, it is possible to
getthe corresponding position in the image frame along witha camera
projection model. Parameters for this projectioncan be obtained
exactly through camera calibration. Wehave considered as an
approximation of this model a simpleorthographic projection in the
experiments presented in theresult sections. This assumption holds
whenever the camerais sufficiently far away from the scene. Once
this projectionhas been defined, animating individualities which
constitutethe crowd amounts to solve the classical following
differentialequation (with x(t) the position of a person in the
imageframe at time t) :
∂x
∂t= v(x(t), t) (6)
equipped with appropriate initial condition x(0) = x0
whichstands for the initial positions of the individual in the
flowfield. In our framework we have used the classical 4-th
orderRunge Kutta integration scheme, which allows to computea new
position x(t + 1) given a fixed time step with anacceptable
accuracy. This new position is then projectedback in the virtual
world frame. This process is depicted inFigure 3.
4.2 Motion editingContinuous crowd motion. Assuming that only a
shortvideo sequence of a crowd is available, we present here
atechnique to generate a continuous and aperiodic anima-tion of
crowd. Following the work on video textures [28](which was later
used in the motion graph techniques forbody motions [29]), the idea
is to generate transitions be-
Figure 3: Motion synthesis from flow field. The positionof the
crowd’s member is projected onto the flow (step
1), the integration is performed in the image frame (step
2) and then the new position is projected back in the
virtual world frame (step 3).
tween different instants in the vector field time series basedon
a similarity criterion. In order to compare different
in-stantaneous velocity fields we propose to use, as suggestedin
[?], the angular error:
d(U,V) =
ZΩ
arccos(< u(x),v(x) >
||u(x)||||v(x)|| )dx (7)
where U and V are two vector fields of same dimensions,
u(x) =
„U(x)
1
«and v(x) =
„V(x)
1
«correspond to
the homogeneous coordinates of the fields vector
elements(vectors of dimension 3). The rest of the procedure is
thenidentical to [28]: the distance matrix is filtered with an
n-tapfilter that magnifies similarities upon a small time
window.From this matrix are derived probabilities of transition
fromone instantaneous field to another. Figure 4 shows an ex-ample
of such matrices built upon a 3 seconds small crowdvideo.
a b
Figure 4: distance matrix; (a): distance matrix using anangular
distance between each vector field in the time
series; (b) filtered matrix with an 8-tap filter
Perspectives. There exists a variety of potential
editingoperations for crowd motions. As perspectives for this
workwe sketch two of them:
-
• Changing the crowd style. Using the Fourier Trans-form may
also help in separating different patterns inthe crowd behavior,
depending on the classes of fre-quency used for the reconstruction.
A signal com-posed with only few low coefficients actually
corre-sponds to a stable and regular behavior. Conversely,manually
adjusting the scale of high frequencies for in-stance is likely to
produce a more ”nervous” patternin the crowd motions, thus giving
the animator a po-tential control over the crowd ”style”. Examples
ofreconstruction using either low or high frequencies aregiven in
figure 5
• Tiling crowd patterns. Given several available mo-tion time
series one could possibly envisage to combinethem spatially in the
same virtual environment (oneentrance and one obstacle acquired
separately for ex-ample). The problem is here to define a proper
juxta-posing or fusion tool that will preserve the
interestingfeatures of the flow. Let us finally note that this
spa-tial registration can also be done in the time domain(how to
blend two series together ?). Dynamic TimeWarping techniques stand
as good candidates for thosepurposes.
Figure 5: Illustration of the Fourier Transform. dashedlines: an
initial time series; line in gray: its mean value
(reconstruction with one frequency); black signal: recon-
struction with 3 frequencies; the resulting filtered time
series is smooth and corresponds to a quiet displacement;
gray signal: the de-noised signal (very high frequencies re-
moved) reconstruct with only high frequencies; this is
linked to a stressed behavior. The black ellipses are some
examples of pedestrian-free areas.
5. RESULTSOur approach has been first tested on a synthetic
crowdsequence to validate the theoretical part of our work. Wehave
also used real sequences to handle real cases. Thoseresults are
presented in this section. Concerning the post-processing, each
time series of motion fields has been repre-sented with only 10% of
its lowest frequencies. This choiceis based on the graph of figure
2.
5.1 Synthetic example
The synthetic sequence represents a continuous flow of hu-man
beings with an obstacle (a cylinder named C) in themiddle of the
image. It has been generated using the classi-cal Helbing
simulation model [9].Motion estimation process In this situation,
the area Cis subject to the aperture problem: any vector inside C
isa reliable candidate. The motion estimation technique be-ing
equipped with a spatial regularization, we need to applya specific
process to prevent from incoherent motions thatmay occur inside the
cylinder. To that end, we completelyblurred this area from an image
to an other, so that theofce constraint is verified nowhere inside
C. We applied arobust M-estimator to the ofce (first term of
relation (4))instead of a quadratic penalization. Such functions,
arisingfrom robust statistics [?], limit the impact of the
locationswhere the brightness constancy assumption does not hold.As
a consequence, this area is not taken into account bythe
observation term of the estimation process. The motionfields
estimated outside the cylinder are then not disturbedby the ones
inside C. This is illustrated in Figure 6. Wepresent 4 images of
the sequence in Figure 6(a–d); an esti-mated motion field is
depicted in Figure 6(e) and a zoom ofthe cylinder area with and
without the specific treatment ispresented in Figure 6(f) and 6(g)
respectively. Concerningthe smoothing parameter α, its value was
set to 250 (thiscorresponds to the dynamics of the brightness
function).Animation Some images of the crowd animation synthesisare
shown on Figure 6(i–l). The animation was generatedthanks to a Maya
plugin which defines a crowd as a set ofparticles and performs the
synthesis described in section 4.As expected, the virtual crowd
moves in accordance withthe underlying motion and the obstacle is
correctly man-aged. This first example proves the ability of the
proposedapproach to synthesize a coherent motion from an
estimatedmotion field. Let us now apply this technique to real
data.
5.2 Real dataWe present the results obtained on two real
sequences. Bothdata have been acquired with a simple video camera
withan MPEG encoder. The motion estimation approach wasapplied
without any particular process, with a smoothingparameter α =
250.Strike sequence The first real sequence is a video
repre-senting a strike. All pedestrians are walking in the
samedirection. Two images of the sequence can be seen on Fig-ure 7
(a-b). In Figure 7 (c-d), we present the synthetic crowdanimation
obtained superimposed on the estimated motionfield. One can observe
that the resulting crowd animationrespect the initial yet simple
pedestrian behaviors. The realscene can then be reproduced with
accuracy while maintain-ing, despite the regularity of the flow, a
particular diversityin the pedestrian trajectories.Entrance
sequence The second real sequence shows a crowdentering a stadium.
This example is very worthwhile sincea variety of phenomena are
present: a continuous flow atthe beginning followed by a
compression of some peoplesin the left part of the images. In
addition, the limit of thedoor is an obstacle that creates two
opposite fluxes and thatgenerates a vortex in the motion fields.
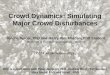
Four images of thesequence are displayed in Figures 7 (e–h).
The animation is represented in Figures 7 (i–l). Figures 7(m–p)
are focused on the region that exhibits opposite mo-
-
(a) (b) (c) (d)
(e) (f) (g)
(i) t = 1 (j) t = 50 (k) t = 100 (l) t = 150
Figure 6: Experimental results on synthetic data: (a,b,c,d):
Sequence #1: simulation of a crowd flow with a cylindricobstacle;
(e) the estimated motion field;(f) motion near the cylinder
estimated with a special care of this no-data area
and (g) same as (f) but without a specific treatment for the
cylinder. One can see that the motion near the cylinder
in (g) is not totally coherent. (i,j,k,l): images of the
simulated crowd with the synthetic flow.
tions. One can see that this complex behavior has been
cor-rectly captured and re-synthesized. This is very
stimulativeregarding the possibilities of this approach to manage
com-plex flows. The next step of the process will be to extractthe
different behaviors (compression, rotation for instance)and to
synthesize them independently.Quantitative values The table 1 shows
some details onthe size, the time computation (generated on a 2GHz
PCwith 1Go RAM) and the quality of the compression for thethree
sequences. We also added the space required by thewhole motion
field and the compressed one. Concerning theanimations, they were
generated at interactive framerates( 60 frames per second). It can
be observed that our ap-proach is thus suitable for real-time
applications and doesnot require a lot of memory.
5.3 DiscussionOur technique has been applied with success to
reproducethe observed scenes. Nevertheless, we have isolated two
lim-itations to our approach:
• the quality of the generated animation is linked withthe
initial density of the crowd members. In this sense,it is the role
of the animator to design an initial crowdedsituation that is
similar to the video conditions, though
seq #1 seq #2 seq#31 (80, 60)x214 (80, 60)x274 (80, 80)x6412 3
min 35 s 4 min 35 s ≈ 11 min3 19.2 Mo 24.7 Mo 76.4 Mo4 1.92 Mo 2.47
Mo 7.64 Mo5 93.4% 97.3% 97.5%
Table 1: Numerical aspects. 1st line: size of the se-quences
(lin,col)× t; 2nd line: CPU time for the motionestimation; 3rd
line: uncompressed size of the motion
field; 4rd line: compressed size; 5th line: percentage of
the information in the compressed field.
a certain latitude is possible. This point requires to
ouropinion more investigation,
• this analysis/synthesis scheme may not keep peopleaway from
colliding between each other. This pointcould be solved by mixing
the a priori information ac-quired by motion estimation as an input
parameter of aclassical dynamic system such as Helbing’s model [9]
orthe more recent Continuum crowd’s model [17]. Thoseaspects are
part of our future works.
6. CONCLUSION
-
(a) (b) (c) (d)
(e) (f) (g) (h)
(i) (j) (k) (l)
(m) (n) (o) (p)
Figure 7: Experimental results on real data: (a,b): Sequence #2:
strike video taken from above; (c,d) images of theresulting
animation; (e,f,g,h) Sequence #3: video of a crowded entrance;
(i,j,k,l) images of the resulting animation;
(m,n,o,p) close-up on a remarkable zone where two opposite
fluxes of people are juxtaposed
In this paper an extension of the concept of motion capturewas
proposed to the domain of crowd animation, based onthe analysis of
video sequences of crowd. Our frameworkrelies on i) a specific
motion information process applied onthe video images and ii) a
data-driven animation schemethat allows to generate animation of
crowds from this in-put information. We applied the presented
method on bothsynthetic and real examples. In our opinion the
results areconvincing and we believe that this method could be
effi-ciently used by animators to produce realistic crowd
effectsfrom sample situations. We also think that this approachcan
be used to compare the results of simulation models toreal
situations according to their underlying flows, thus pro-viding a
quantitative evaluation framework (rather than thetraditional
qualitative one). Motivated by our experiments,three points are
envisaged to continue this work:
• concerning the analysis part, the motion estimationprocess can
be improved by introducing more specific
spatio-temporal models of continuous crowd formula-tion like
[16]. This can be done through the use ofthe optical flow framework
but it can also be relevantto explore the data-assimilation
possibilities used forinstance in meteorology,
• concerning the synthesis part, it is possible to considermore
sophisticated animation system by introducingthe a priori
information obtained from the analysispart in dynamic systems such
as [9, 17],
• finally we plan to continue the analogy with motioncapture and
propose new editing methods that willmake it possible to slightly
change/control the intialcaptured motions.
7. ACKNOWLEDGMENTSThe authors wish to thank Amel Achour and
Gwendal Jabotfor their contributions to the project, and also
reviewers forpointing out missing references in our work.
-
8. REFERENCES[1] J. Chai, J. Xiao, and J. Hodgins. Vision-based
control
of 3d facial animation. In Eurographics/ACMSIGGRAPH Symposium on
Computer Animation,pages 79–87, Grenoble, France, August 2003.
[2] K. Bhat, S. Seitz, J. Hodgins, and P. Khosla.Flow-based
video synthesis and editing. ACMTransactions on Graphics, special
issue, ProceedingsACM SIGGRAPH 2004, 23(3):360–363, 2004.
[3] L. Favreau, L. Reveret, C. Depraz, and M.-P. Cani.Animal
gaits from video. In Eurographics/ACMSIGGRAPH Symposium on Computer
Animation(SCA’04), Grenoble, France, August 2004.
[4] D. Gibson, D. Oziem, C. Dalton, and N. Campbell.Capture and
synthesis of insect motion. InEurographics/ACM SIGGRAPH Symposium
onComputer Animation (SCA’05), pages 39–48, July2005.
[5] J. Diener, L. Reveret, and E. Fiume.
Hierarchicalretargetting of 2d motion fields to the animation of
3dplant models. In Eurographics/ACM SIGGRAPHSymposium on Computer
Animation (SCA’06),Vienna, Austria, August 2006.
[6] S. Chenney. Flow tiles. In Eurographics/ACMSIGGRAPH
Symposium on Computer Animation(SCA’04), pages 233–242, Grenoble,
France, August2004.
[7] E. Bouvier, E. Cohen, and L. Najman. From crowdsimulation to
airbag deployment: particle systems, anew paradigm of simulation.
Journal of ElectronicImaging, 6(1):94–107, January 1997.
[8] V. Blue. Cellular automata microsimulation formodeling
bi-directional pedestrian walkways.Transportation Research, Part B:
Methodological,35(3):293–312, March 2001.
[9] D. Helbing, I. Farkas, and T. Vicsek. Simulatingdynamical
features of escape panic. Nature,407(1):487–490, 2000.
[10] A. Braun and S. Raupp Musse. Modeling individualbehaviors
in crowd simulation. In Proc. of ComputerAnimation and Social
Agents (CASA’03), NewJersey, USA, May 2003.
[11] N. Courty and S. Musse. Simulation of Large CrowdsIncluding
Gaseous Phenomena. In Proc. of IEEEComputer Graphics International
2005, pages206–212, New York, USA, June 2005.
[12] S. Raupp Musse and D. Thalmann. Hierarchicalmodel for real
time simulation of virtual humancrowds. In IEEE Trans. on
Visualization andComputer Graphics, volume 7(2), pages 152–164.IEEE
Computer Society, 2001.
[13] M. Sung, M. Gleicher, and S. Chenney. Scalablebehaviors for
crowd simulation. Comput. Graph.Forum, 23(3):519–528, 2004.
[14] T. Sakuma, T. Mukai, and S. Kuriyama. Psychologicalmodel
for animating crowded pedestrians. Journal ofVisualization and
Computer Animation,16(3-4):343–351, 2005.
[15] W. Shao and D. Terzopoulos. Animating
autonomouspedestrians. In Proc. SIGGRAPH/EG Symposium onComputer
Animation (SCA’05), pages 19–28, LosAngeles, CA, July 2005.
[16] R. L. Hughes. The flow of human crowds. Annualrevue of
Fluid. Mech., 20(10):169–182, 2003.
[17] A. Treuille, S. Cooper, and Z. Popovic. Continuumcrowds.
ACM Transactions on Graphics, special issue,Proceedings ACM
SIGGRAPH 2006, 25(3):1160–1168,2006.
[18] D. Crisan. Particle filters, a theoretical perspective.
InN. de Freitas A. Doucet and N. Gordon, editors,Sequential
Monte-Carlo Methods in Practice. Springer,2001.
[19] E. Andrade, S. Blunsden, and R. Fisher. Modellingcrowd
scenes for event detection. In Int. Conf. onPattern Recognitiion,
ICPR 2006, pages 175–178,2006.
[20] A. Mitiche and P. Bouthemy. Computation andanalysis of
image motion: a synopsis of currentproblems and methods. Int. J.
Computer Vision,19(1):29–55, 1996.
[21] Fluid experimental flow estimation based on anoptical-flow
scheme. Experiments in fluids,40(1):80–97, 2006.
[22] B. Lucas and T. Kanade. An iterative imageregistration
technique with an application to stereovision. In In Proc. Seventh
International JointConference on Artificial Intelligence, pages
674–679,Vancouver, Canada,, 1981.
[23] B.D. Lucas. Generalized image matching by themethod of
differences. PhD thesis, School of ComputerScience, Carnegie–
Mellon University, Pittsburgh, PA.,1984.
[24] B. Horn and B. Schunck. Determining optical flow.Artificial
Intelligence, 17:185–203, 1981.
[25] M. Black. Recursive non-linear estimation ofdiscontinuous
flow fields. In Proc. Europ. Conf.Computer Vision, pages 138–145,
Stockholm, Sweden,1994.
[26] E. Mémin and P. Pérez. Dense estimation andobject-based
segmentation of the optical flow withrobust techniques. IEEE Trans.
Image Processing,7(5):703–719, 1998.
[27] T. Corpetti, E. Mémin, and PO. Pérez. Denseestimation of
fluid flows. IEEE Transactions onPattern Analysis and Machine
Intelligence,24(3):365–380, March 2002.
[28] A. Schödl, R. Szeliski, D. Salesin, and I. Essa.
Videotextures. ACM Transactions on Graphics, specialissue,
Proceedings ACM SIGGRAPH 2000, pages489–498, 2000.
[29] L. Kovar, M. Gleicher, and F. Pighin. Motion graphs.ACM
Transactions on Graphics, special issue,Proceedings ACM SIGGRAPH
2002, 21(3):473–482,2002.
[30] F.X. Le-Dimet and O. Talagrand. Variationalalgorithms for
analysis and assimilation ofmeteorological observations:
theoretical aspects.Tellus, pages 97–110, 1986.