Embed Size (px)
Citation preview

Because of the high precision of pre-sent-day GPS and reflectorless lasertechnology, geologic information andremotely sensed data (i.e., seismic andGPR grids, wells) can be positionedaccurately in 3-D and reconstructed asa virtual image. Hence, we have devel-oped the “virtual outcrop” for appli-cations that require knowledge aboutthe 3-D spatial arrangements of rocktypes.
This article shows how we haveapplied digital methodology to geo-logic reconnaissance and in detailedoutcrop mapping, including charac-terization of an outcrop as a reservoiranalog where we merged detailed out-crop mapping with geophysical GPRsurvey data, wells, and stratigraphicsections.
Mapping is the foundation of thegeologic sciences. The fact that spe-cific observations are attached to spe-cific geographic locations is critical inevaluating spatial and temporal rela-tionships. The three basic elementsnecessary for a useful geologic map arelocation, lithologic information, andspatial or geometric relationships.Digital mapping is considerably moreprecise than traditional field methodsand allows information to be gatheredaccurately in 3-D. It also allows datato be collected from remote or inac-cessible locations, such as on verticalcliff faces. We have coined the term“cybermapping” to describe thesetechniques because they differ fromtypical GIS data bases which are builtby digitizing hard-copy sources (e.g.,paper maps).
GPS incorporates signals frommultiple satellites to triangulate a posi-tion on the surface of the earth. The dis-tinctive feature of GPS is that thelocation generated is “geocentric” (i.e.,it is relative to the center of the earth).This means that measurements takenin one place can be directly comparedto any other GPS position. The rapiddevelopment of this technology hasproduced significant cost reduction;an increase in capabilities; and faster,more “friendly” data reduction; inaddition, it is considerably more pre-cise than traditional field mapping inmost cases. Consequently, the generaluser can generate precise locationsmuch easier than even five years ago.A georeferenced location can also bedetermined in the field in real time. A
single receiver positioning has a pre-cision of approximately 100 m.Positioning of one receiver relative toanother—“differential” positioning—can be as precise as 1 mm (with the car-rier phase part of the signal) or 0.2-5m (with the code phase part of the sig-nal), depending on the type of receiverand method (See Table 1 in Aiken etal., TLE, January 1998). Real-time dif-ferential code phase positioning isinstantaneous but at lower accuracy(decimeters to a few meters).
Commercial and governmentproviders broadcast differential codecorrection signals through radio sta-tions or even satellites at a cost that isvery affordable. RTK, real-time kine-matic GPS, employs a method of car-
rier-phase differential GPS position-ing that provides the highest preci-sion, centimeters in real time.However, the observer must operatethe transmitting radio and GPS basestation.
Another technological advancestrongly influencing digital mappingis reflectorless laser surveying.Utilization of the “total station” hasbeen common in many disciplines ofthe geosciences consisting of a laserrange finder with corner reflectorprisms, and horizontal and verticalangle measuring capabilities. Angularmeasurement error is in the range of3-5 arc-s, resulting in an accuracy of 1-4 cm per km. The basic laser rangefinder parameters are pulse time of
0000 THE LEADING EDGE FEBRUARY 2000 FEBRUARY 2000 THE LEADING EDGE 197
Creating virtual 3-D outcropXUEMING XU, CARLOS L. V. AIKEN, JANOK P. BHATTACHARYA, RUCSANDRA M. CORBEANU, KENT C. NIELSEN,GEORGE A. MCMECHAN, AND MOHAMED G. ABDELSALAM, University of Texas at Dallas, Richardson, Texas, U.S.
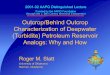
Figure 1. (a) The outcrop photo shows 14 original control points surveyedby reflectorless Topcon total station (red). Using these control points, the camera geometry can be explicitly solved and then the points “backprojected” onto the image plane (green). Standard deviation is about 4.2pixels. (b) and (c) Mapped portion of outcrop from two view angles. The image was draped on the laser mapped terrain surface to produce aphotorealistic outcrop.
a)
b) c)

flight, phase modulation/detection,and geometry. The maximum mea-surable range and accuracy of a laserrange finder depend on target type,size, reflectivity, and atmospheric vari-ables. The accuracy of the range mea-surement for different kinds of laserrange finders can vary from a few mil-limeters to a few meters, but their abil-ity to measure angles is the greatestlimitation on a position (the errorincreasing with distance). A total sta-tion may have a maximum measurablerange of 80 m reflectorless to a poorlyreflective target (such as terrain) but 10000 m to a corner reflector prism usedin conventional surveying.
On the other hand, reflectorlesslaser range finders (“guns”) have max-imum ranges of 500 m or more, withangle errors in decimal degrees andranges in decimeters. An importantfeature of some laser range finders iscontinuous sampling or “trigger on”mode. These laser range finders oper-ate in nanoseconds and provide posi-tions 3-4 times a second. This makesit possible to collect data along a lineby sweeping the “laser gun” across anoutcrop. The result is a digital “lasersketch” of the geologic feature—typi-cally a contact, boundary or surface,such as a fault trace or the top or baseof a bed. This allows rapid mappingwithout visiting the target.
When this capability is coupledwith GPS, local terrain/geologic mod-els can be generated very quickly.When the outcrops can be traced overa distance (particularly across adrainage area, such as on differentsides of a valley), solving a “three-point problem” will readily yieldstrike, dip, and other orientationinformation, although this oftenassumes that the surface is planar.
Finally, a detailed digital terrainmodel provides an elegant, accuratebase for outcrop visualization.
Integrating GPS and GIS. Advancesin computing allow GPS/laser-posi-tioned data to be stored and used dig-itally in the field. Small, rugged,pen-based computers can handle largesoftware packages (including GIS) thatfacilitate data management and gen-eration of digital maps. Physical attrib-utes (e.g., lithology) can be added toany given data point which means thatnote-taking can be digital as well. Theability to record digitally does notchange the basic process of lithologicidentification, but it does simplify theprocess by recording the observationdirectly “on” the map.
With this in mind, we built our GIS
field-mapping software to interfacewith GPS and various continuousoperating laser instruments for geo-logic mapping and analysis. The sys-tem accepts real-time GPS data forpositioning laser or total station con-trol points, or directly loggingGPS/laser points for topography orgeologic features. All data are recordedin ESRI’s shapefile format, making iteasier to input into GIS packages. Thesystem has many standard GIS capa-bilities (zoom in/out, panning, andspatial or attribute query) and can per-form some geologic analysis such ascalculating strike and dip and gener-ating cross-sections even in real time.More importantly, it provides theframework for more sophisticated 3-
D modeling and analysis.
The photorealistic outcrop. A photo-realistic outcrop is derived through amapping process that glues the pho-tograph of that outcrop on the terrainsurface. A key problem is generationof the texture coordinates for the ter-rain surfaces. The common approachin GIS and remote sensing is to use apolynomial function to transform theimage into world space through thecontrol points. This approach is easyto implement, because it does notrequire any knowledge of camerageometry. However, it is appropriateonly when the perspective is near per-pendicular, there is a minimum accu-racy requirement, and the relief is
198 THE LEADING EDGE FEBRUARY 2000 FEBRUARY 2000 THE LEADING EDGE 00
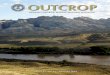
Figure 2. (a) Map of Frontier outcrop belt showing study areas and well-logdata. (b) Sandstone isolith map of elongated Frewens delta deposited in atrough created by differential compaction around the Willow delta lobe tothe southeast and a structural high to the northeast (after Willis et al.,1999). (c) Cross-section showing the onlap of sandstones against this struc-tural high. Correlation of the bentonites by Bhattacharya and Willis clearlyshows the folding.

small, such as in the case of a satelliteimage or aerial photograph. Outcropphotographs taken in the field are gen-erally highly oblique and subject toradial and tangential camera distor-tions. Capturing outcrop photographsis actually a process of projecting out-crops into image planes through thecamera lens. In order to map the pho-tograph onto the terrain surface inhigher resolution, we could model thecamera geometry. This includes intrin-sic and extrinsic camera parametersand correction of lens distortion.
The approach we used successfullyis to rely only on control points to solvecamera geometry and lens distortion.We assume that the light rays from theobject to its image are collinear. Thisallows us to determine the camerageometry through linear minimizationand nonlinear optimization. Lens dis-tortion can be corrected at the sametime. Therefore, a digital image can betied directly to a terrain model. Theresult is a three-dimensional photore-alistic outcrop.
A photorealistic outcrop was cre-ated in the Cretaceous Austin Chalknear Dallas, Texas, U.S. Geologic con-tacts, faults, topographic randompoints, and topographic break lineswere surveyed through an RTK-con-trolled total station. The terrain surfacewas modeled through a constrainedtriangulation mesh. A picture of theoutcrop was taken by a digital camera(resolution = 1280 � 1024 pixels).Fourteen control points were identifiedon the image (Figure 1a). Camera mod-eling yields a standard deviation errorabout 4.2 pixels, which is about 20 cmin accuracy. Figures 1b and 1c show thephotorealistic images from two viewangles.
Generation of a photorealistic “vir-tual” outcrop allows a user to “walkthrough” the virtual outcrop in animmersive virtual environment. Theoutcrop could then be lifted so the usercan display the associated subsurfaceinformation. On-screen digitizing onthe photorealistic virtual outcropwould provide true three-dimensionalcoordinates of features, which pro-vides a new way to map more geol-ogy.
Examples. Over the last five years, ourresearch group has performed fieldexercises using various digital-map-ping configurations in several scales.After transporting the laser gun/tri-pod and an RTK GPS receiver/radioto the survey site, it takes about 15minutes to set up the laser system andposition the station and azimuth con-trol. It also typically takes 15 minutes
0000 THE LEADING EDGE FEBRUARY 2000 FEBRUARY 2000 THE LEADING EDGE 199
Figure 3. (a) 3-D perspective, mapped using Laser Atlanta range finder sys-tem and RTK GPS, shows the present-day folding of the Clayspur ben-tonite. (b) Terrain map with Clayspur data points overlain (red). See Figure2a for location. (c) Interpolation of present day Clayspur bentonite surface.The contoured surface shows the northwest-fold axis, also obvious in theperspective view.
a)
b)
c)

to map (“laser sketch”) everything(topography and features) visible to500 m (theoretically) or 400 m (practi-cally), depending on the characteristicsof the surface and type of the laser sys-tem. The equipment is then moved tothe next location in order to continuemapping. We mapped 6-8 contactsover outcrops up to 1 km wide in lessthan a half an hour in inaccessible ver-tical cliffs. Data are stored on PCMCIAcards or directly input to a rugged,pen-based computer.
Mapping subtle regional structures inWyoming. This study investigated therelationship between deposition ofancient delta lobes that formed aroundsubtle syntectonic structures withinthe Cretaceous Frontier Formation inWyoming’s Powder River Basin
(Figure 2a). The deltas had beenmapped in detail in a previousallostratigraphic study that focused onthe internal geometry of beds withinthe mapped deltas (Figures 2b and 2c).This new study focused on the largerscale tectonic features (tens of metersin amplitude) that control the positionof the delta sandstone bodies. Thesetypes of structures may relate tochanges in tectonic intraplate stressesand may be an important factor in cre-ating subtle unconformities in thestratigraphic record, as well as con-trolling the position of reservoir sand-stone bodies in hydrocarbonreservoirs. Conventional mapping,using topographic maps and air pho-tos, usually allows determination of3-D position to about 5-10 m. This isacceptable for determining the x,y
position but is totally inadequate fordetermining elevation of low-ampli-tude structural features. GPS/laserdata resolve this difficulty via rapidmeasurements with accuracy in x,y,zof centimeters to decimeters in sec-onds. Consequently, it is possible tomap subtle variations in the elevationsof beds that relate to the long wave-length, low-amplitude structures.
This study demonstrated the logis-tics, methodology, and timetable forcollecting data over 40 km2 in detailand coarsely over 150 km2. Personnelbecame familiar with the outcrop loca-tions and the detailed allostratigraphymapped earlier during three days oftraining. An RTK GPS receiver andradio was established on a high topo-graphic point, which allowed accu-racy of a few centimeters for positions
200 THE LEADING EDGE FEBRUARY 2000 FEBRUARY 2000 THE LEADING EDGE 00
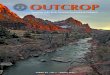
Figure 4. (a) Photo mosaic of Corbula Gulch outcrop, looking northeast, showing sedimentological bounding sur-faces, and location of measured stratigraphic sections. A large delta plain channel containing inclined bedding cutsinto the east side of the outcrop. (b) Data points of the bounding surfaces shown in Figure 4a mapped with a LaserAtlanta range finder. Individual points are in 3-D UTM coordinates. The points were projected onto an x-z plane inorder to compare visually with the outcrop photo. (c) 3-D perspective of various bounding surfaces, fitted to thelaser mapping and corehole data points and interpolated across the conjoining cliff faces. These surfaces will beused to develop a quantitative volume for reservoir flow-simulation studies.
a)
b)
c)

within a 10-km radius in real time. Thebentonite beds to be mapped are extra-ordinarily visible as white layers andother beds such as pebble and massivesandstone beds are identifiable be-cause of their association with these.Most contacts of interest are distinctiveeven at several hundred meters, espe-cially when seen through the tele-scopes of the laser system. Sites fromwhich important features and surfaceswere visible were picked and thenpositioned by RTK GPS before tracingby laser gun.
Figure 3a is an example. The basebentonite layer is the Clayspur and thegeographic distribution of the outcropof that layer and the character of thesurrounding terrain (Figure 3b) indi-cates just how effective this method is.A 3-D distribution of the mappedClayspur and a surface fit (Figure 3c)displays the present structure.
3-D reservoir characterization of out-crop analogs in Utah. A second studymapped internal structure of dippingbeds that formed as a result of accre-tion of sandy bars in an ancient river.These river channel deposits occurwithin the Cretaceous Ferron sand-stone in Central Utah. The study wasgeared toward developing detailed 3-D models of channelized facies ele-ments for reservoir/aquifercharacterization and fluid-flow mod-eling. GPS and laser systems wereused for two different aspects of thestudy: (1) to locate 2-D and 3-D GPRsurveys, coreholes, outcrop measuredsections, and mapping of beds in theoutcrop (Corbula Gulch outcrop), and(2) to map thin mudstone beds thatdrape the bars in an area with adjacentvertical cliffs in different orientations.Because the same beds could bemapped around an outcrop bend, wewere able to interpolate the 3-D geom-etry. Surface and subsurface data wereintegrated and visualized at CorbulaGulch. Tops and bottoms of sandstonelayers, mapped along the outcrop(Figures 4a and 4b) and defined bycore drilling, were positioned by GPSand then fitted to surfaces and visual-ized (Figure 4c). This 3-D renderingcan now be used as the basis for a 3-D gridded volume for flow simula-tion. The GPR survey data also provideindependent determination of the 3-Dfacies architecture of these systems.The purpose of the second study, map-ping synsedimentary growth faults atMuddy Creek, was to provide a 3-Drendering of a structurally and strati-graphically complex area and to testGPS mapping over an area interme-
diate in scale between Corbula Gulchand Wyoming. During two half daysof digital mapping, we generated morethan 60 000 data points (Figure 5),including local terrain, major bound-ing surfaces, and faults. The terrainand sedimentary bounding surfaceswere fitted and visualized (Figure 6).
Conclusions. We have developed spe-cial software and modified availablehardware to create an integrated toolfor collecting and positioning digitalgeologic data in 3-D space. The digi-tal capture of data allows geologic fea-tures and maps to be quickly producedin 3-D.
These are useful for understanding
0000 THE LEADING EDGE FEBRUARY 2000 FEBRUARY 2000 THE LEADING EDGE 20
Figure 5. (a) 2-D map of surveyed points by GPS and Laser Atlanta rangefinder at Muddy Creek, different features coded by different colors. (b) 3-D perspective of surveyed points, looking north. Note the boundingsurface line.
a)
b)

geologic systems from a variety of per-spectives and as input for problemsthat require 3-D information such asreservoir and aquifer models.
Suggestions for further reading. “Realtime and the virtual outcrop improvegeological field mapping” by Xu et al.(EOS, 1999). Digital Mapping Methods:Accurate Digital Data Capture and Analysisfor the Field Geoscientist by Nielsen et al.(GSA Continuing Education Manual,1999). Digital Photogrammetry: AnAddendum to the Manual of Photogram-metry (American Society for Photogram-metry and Remote Sensing, 1996).“Architecture of a tide-influenced deltain the Frontier Formation of CentralWyoming, USA” by Willis et al. (Sedi-
mentology, 1999) “Lowstand deltas in theFrontier Formation, Wyoming, U.S.A. byBhattacharya and Willis (in press AAPGBulletin). LE
Acknowledgments: We acknowledge theDepartment of Energy (Contract DE-FG03-96ER14596), R. Davies and ARCOExploration and Production, and MikePhoenix and the Environmental SystemsResearch Institute (ESRI) EducationProgram for support, B. Landry of LaserAtlanta Optics Inc. and D. Mills of EXI Inc.for laser equipment, the University NAVS-TAR Consortium for RTK equipment, andthe GOCAD Consortium for GOCAD soft-ware.
Corresponding author: [email protected]
202 THE LEADING EDGE FEBRUARY 2000 FEBRUARY 2000 THE LEADING EDGE 00
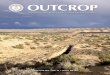
Figure 6. (a) Photo mosaic of Ferron outcrops in Muddy Creek. Note largegrowth fault in the middle of the photo overlain by flat undeformed strata.Growth faulted strata are restricted to the sands immediately overlying theTununk shales. Location in perspective to left. (b) Key stratigraphic sur-faces (100 and 200 in Figure 6a) were mapped along the walls of MuddyCreek Canyon using the reflectorless laser range finder. Using this data,surfaces were fitted to these data allowing them to be interpolated acrossthe canyon and visually rendered in 3-D. This perspective view showsthese interpolated surfaces. Growth faulted strata lie below surface 100.
a)
b)