-
8/8/2019 Creating a Particle System in Processing
1/24
Creating a Particle System in Processing: Beginning with
Particle Animation
March 12th, 2010 Code, Java, Processing, Software
I have recently decided to take on the task of creating a
particle system from scratch designed towork specifically with
Processing. I have always been interested in the subject and I
wanted to
challenge myself and share something with the Processing
community. I am going to write thisseries of articles to document
my learning process as well as the evolution of this library.
For this first article, I am going to start with the most basic
concepts of dealing with particles in
Processing. No differential equations, no numerical methods,
just simple linear algebra and Java.This one may be pretty boring
to most Processing users, but I want to start off simple to
establish
a good base of knowledge because it will get pretty hairy later.
If you are a complete beginner, Isuggest you start here and come
back when you have a decent understanding of Processing.
The Hello World! of particle physics
The first thing we want to examine is how to draw and move a
single particle. First check outthis code in action here then come
back and closely examine the source:
//particle's screen coordinatesfloat x, y;//particle's
velocity//velocity is change in postionfloat vx, vy;
void setup() {size(400, 400);
stroke(0);strokeWeight(3);fill(150);smooth();//set position and
velocityresetParticle();}
void draw() {background(255);
//draw the particle with diameter of 10ellipse(x, y, 10,
10);
/** update the position by adding on the velocity* remember that
velocity means incremental change* in position.*/x += vx;y +=
vy;
}
-
8/8/2019 Creating a Particle System in Processing
2/24
-
8/8/2019 Creating a Particle System in Processing
3/24
stroke(0);strokeWeight(3);fill(150);smooth();//set position and
velocityresetParticle();}
void draw() {background(255);
//draw the particle with diameter of 10ellipse(x, y, 10,
10);
/** update the velocity by adding on the acceleration* remember
that acceleration means incremental change* in velocity.*/vx +=
ax;
vy += ay;
/** update the position by adding on the velocity* remember that
velocity means incremental change* in position.*/x += vx;y +=
vy;
}
// on a mouse clickvoid mousePressed() {resetParticle();
}
void resetParticle() {//reset the particle to the middle of the
screenx = y = width/2f;
//set velocity to 0vx = vy = 0f;
ax = random(-0.01, 0.01);ay = random(0.003, 0.01);//downward
}
Now that we are adding on the acceleration to the velocity each
frame, the velocity increases as
time goes on and the particle moves faster and faster. Kind of
like gravity (an acceleration of 9.8
m/s2) or a car accelerating faster and faster. Congratulations!
We now have the ability to crudelydescribe Newtonian motion!
Abstraction and Multiple Particles
-
8/8/2019 Creating a Particle System in Processing
4/24
Now that we can create one particle with ease, lets create many.
Basically what we need to do iscreate an abstraction of what a
particle is then turn that into a Java class. This isnt a Java
lesson
and I hope you know what that means so lets jump straight into
it. Check out this program thencome back and learn about the
code.
Particle[] particles;int NUM_PARTICLES = 100;
void setup() {size(400,
400);stroke(0);strokeWeight(3);fill(150);smooth();}
void draw() {background(255);if (particles != null) {
for (int i = 0; i < NUM_PARTICLES; i++)
{particles[i].exist();
}}
}
void mousePressed() {particles = new Particle[NUM_PARTICLES];for
(int i = 0; i < NUM_PARTICLES; i++) {particles[i] = new
Particle();
}}
public class Particle {float x, y;float vx, vy;float ax, ay;
public Particle() {x = mouseX;y = mouseY;vx = vy = 0f;ax =
random(-0.2, 0.2);ay = random(-0.08, 0.05);
}
public void exist() {
vx += ax;vy += ay;x += vx;y += vy;ellipse(x, y, 10, 10);
}}
-
8/8/2019 Creating a Particle System in Processing
5/24
Of course this is too crazy to resemble anything real in the our
physical world, but it shows thepoint. Basically what we have done
is created a Particle class which contains references to its
own state information. Then we can have an array of Particles
and update those in a nice loop.There is still some more
improvement that can be done to this though. Lets talk about
vectors.
Vectors
A Vector is essentially a 1 row N column matrix. In computer
graphics, we use the Vector data
structure to represent multi-dimensional state information such
as position, velocity, andacceleration. Because they are matrices
and we set them to have the same dimensions, we can
use standard matrix operations and concepts from linear algebra
to help us solve some of thesystems of linear equations we face.
Processing contains its own implementation of a vector
called a PVector. It is a 3-dimensional vector so we can
represent things in 2d or 3d space.Check out this re-write of the
last program in action and I will explain how it works after
the
code:
ArrayList particles;int LIFESPAN = 120;//global gravityPVector
acceleration = new PVector(0f, 0.025);
void setup() {size(400,
400);stroke(0);strokeWeight(3);fill(150);smooth();particles = new
ArrayList();}
void draw() {background(255);//only create when mouse movesif
(abs(mouseX-pmouseX) > 0.0001) {particles.add(new
Particle());
}for (int i = particles.size()-1; i >= 0; i--) {Particle p =
(Particle)particles.get(i);if(!p.exist()) {particles.remove(i);
}}
}
public class Particle {PVector location;PVector velocity;int
age;
public Particle() {location = new PVector(mouseX, mouseY);//get
velocity from direction and speed of mouse movementvelocity = new
PVector(mouseX-pmouseX, mouseY-pmouseY);
-
8/8/2019 Creating a Particle System in Processing
6/24
age = 0;}
public boolean exist()
{velocity.add(acceleration);location.add(velocity);ellipse(location.x,
location.y, 10, 10);if (age > LIFESPAN) {return false;
}age++;return true;
}
}
Notice that I changed over the x and y variables to the PVectors
and this gives us operations like
add, subtract, multiply, magnitude, normalize, and etc. Check
out this article on matrix math ifyou dont remember it from grade
school. In this example, all you need to know is that when you
add two PVectors, it does a matrix add. I do, however, highly
suggest that you get real familiarwith matrix math and systems of
equations if you want to move on:
velocity.add(acceleration);
//is equivalent to
velocity.set(
acceleration.x+velocity.x,acceleration.y+velocity.y,acceleration.z+velocity.z
);
I also moved the acceleration vector out to have global static
scope. And I am getting the
velocity from the changing mouse positions. Remember that
velocity is change in position, so wecan get the velocity vector by
subtracting the new cursor position from the old.
I dont really want to go into Java stuff but notice that I also
changed the array to an ArrayList.And if you are wondering why I
didnt use a parameterized ArrayList, it is b/c Processing uses
a
light-weight open source java compiler that doesnt support
it.
Until next time
That is it for now. I hope that wasnt too boring. In the next
article, I am going to talk more aboutvectors, different kinds of
forces. I will also briefly point out the inaccuracies in our
integration
technique and open up a huge can of maths worms.
-
8/8/2019 Creating a Particle System in Processing
7/24
Creating a Particle System in Processing: Applying Forces
March 17th, 2010 Code, Java, Processing, Software
This article is one in a series of articles about particle
systems in Processing. To view the first of
the series, click here.
To recap, in my last article, I went over the basics of
particles and Newtonian motion inProcessing. In this article, I am
going to explain using forces andNewtons Second Law of
Motion to describe the effects of forces on our particles. I am
also going to point out that ourcurrent integration technique is
flawed as segway into the next article.
Forces
When we last left our particle physics sandbox, it looked liked
this:
ArrayList particles;int LIFESPAN = 120;//global gravityPVector
acceleration = new PVector(0f, 0.025);
void setup() {size(400,
400);stroke(0);strokeWeight(3);fill(150);smooth();particles = new
ArrayList();}
void draw() {background(255);//only create when mouse movesif
(abs(mouseX-pmouseX) > 0.0001) {particles.add(new
Particle());
}for (int i = particles.size()-1; i >= 0; i--) {Particle p =
(Particle)particles.get(i);if(!p.exist()) {particles.remove(i);
}}
}
public class Particle {PVector location;PVector velocity;int
age;
public Particle() {location = new PVector(mouseX, mouseY);//get
velocity from direction and speed of mouse movementvelocity = new
PVector(mouseX-pmouseX, mouseY-pmouseY);
-
8/8/2019 Creating a Particle System in Processing
8/24
age = 0;}
public boolean exist()
{velocity.add(acceleration);location.add(velocity);ellipse(location.x,
location.y, 10, 10);if (age > LIFESPAN) {return false;
}age++;return true;
}
}
The PVectoracceleration represents the acceleration resulting
from a gravitational force.
Gravity is a force and results in an acceleration of an object.
There is an equation to determinegravity but we usually take it to
result in a constant acceleration of 9.8 m/s^2 when viewing
things on earth. This is because our measurements on earth
usually involve relatively small andclose things [relative to
earth's mass and space] and the difference b/w earths effects on
these
objects is negligible.
Anyways, like all other units of motion, a force can be
represented as a Vector. And differentforces have different
equations to describe their effects. The result a force has on an
object is
described by Newtons Second Law of Motion:
where fis the force, m is the objects mass, and a is
acceleration. It is usually more helpful to
represent the equation in this alternate form:
Knowing this, we can now calculate the acceleration resulting
from a force on an object. First wewill get rid of the global
PVector acceleration then we will alter the Particle class to look
like
this:
public class Particle {PVector location;PVector velocity;PVector
acceleration;float mass;
public Particle() {location = new PVector(mouseX, mouseY);//get
velocity from direction and speed of mouse movementvelocity = new
PVector(mouseX-pmouseX, mouseY-pmouseY);acceleration = new
PVector(0, 0, 0);mass = 1;
-
8/8/2019 Creating a Particle System in Processing
9/24
}
public boolean exist()
{velocity.add(acceleration);location.add(velocity);ellipse(location.x,
location.y, 10, 10);//when it comes to a rest, get rid of itif
(abs(velocity.x) < 0.001 && abs(velocity.y) < 0.001)
{return false;
}acceleration.mult(0); //need to clear accelerationreturn
true;
}
void applyForce(PVector force)
{acceleration.add(PVector.div(force, mass));
}
}
First, note the changes to the Particle class structure:
1. The particle now keeps track of its own acceleration2. Each
particle has a mass, which we are just setting to 1 for
convenience3. We added the applyForce(PVector) method4. We are now
removing a particle from the system when its velocity falls below a
certain level
Take a look at the applyForce method. There are a few things to
note about this method in
particular:
1. Notice that this is basically Newtons equation in the second
form we presented:a = f/m2. We are calling add() on acceleration
b/c we may be applying other forces to this particle. It may
already have an acceleration value set. But we are also clearing
the acceleration after each
iteration [line 23]. This is important b/c we dont want the
force to have an accumulative effect.
See what happens when you comment out that operation.
3. Not that this is a Java lesson, but notice that I used the
static PVector.div(PVector, float)method rather than using an
instance method. The static methods return the results of the
operations as new instances whereas the instance methods modify
the PVector that the
reference points to. Pay attention to this detail, when to use
either should become obvious if
not already.
Applying a Force: Friction
Now we want to actually apply a force to a particle. There are
many types of forces and many
equations to describe their behavior. By far, one of the easiest
to understand is a dissipativeforce. It most commonly manifests
itself in day to day life in the form offriction but can also
be
used to simulate other phenomena. The equation is:
-
8/8/2019 Creating a Particle System in Processing
10/24
where fis the resulting force, C is a mathematical constant
known as the coefficient offriction, and v is the objects velocity.
Obviously, the largerC is, the more friction is applied
and the quicker your object will come to a state of rest. It is
usually between 0.0 and 1.0 . Toimplement this, I added this global
function:
void applyDissipativeForce(Particle p, float friction) {PVector
f = PVector.mult(p.velocity, -friction);p.applyForce(f);
}
Pretty self-explanatory. We take the velocity of the particle
that we are applying this force to and
we multiply it by the coefficient * -1. Lets put all this
together. Check out the code in action,then come back and examine
the whole source:
ArrayList particles;
void setup() {size(400, 400);
stroke(0);strokeWeight(3);fill(150);smooth();particles = new
ArrayList();}
void draw() {background(255);//only create when mouse movesif
(abs(mouseX-pmouseX) > 0.0001) {particles.add(new
Particle());
}
for (int i = particles.size()-1; i >= 0; i--) {Particle p =
(Particle)particles.get(i);// experiment w/ different friction
coefficientsapplyDissipativeForce(p, 0.08);if(!p.exist())
{particles.remove(i);
}}
}
void applyDissipativeForce(Particle p, float friction) {PVector
f = PVector.mult(p.velocity, -friction);p.applyForce(f);
}
public class Particle {PVector location;PVector velocity;PVector
acceleration;float mass;
public Particle() {location = new PVector(mouseX, mouseY);
-
8/8/2019 Creating a Particle System in Processing
11/24
//get velocity from direction and speed of mouse
movementvelocity = new PVector(mouseX-pmouseX,
mouseY-pmouseY);acceleration = new PVector(0, 0, 0);mass = 1;
}
public boolean exist() {//when it comes to a rest, get rid of
itif (abs(velocity.x) < 0.001 && abs(velocity.y) <
0.001) {return false;
}velocity.add(acceleration);location.add(velocity);ellipse(location.x,
location.y, 10, 10);acceleration.mult(0);return true;
}
void applyForce(PVector force)
{acceleration.add(PVector.div(force, mass));
}
}
Applying Another Force: Attraction
Now we are going to implement a more complicated force,
attraction. This force could be used tosimulate gravitational
force, without all that Einstein, space-time continuum craziness of
course.
The equation we are going to use is:
where fis the force, G is the gravitational constant [defines
the apparent 'strength'], m1 and
m2 are the masses of the two bodies in effect, and d is the
distance between the two bodies. The
problem is that this equation computes the magnitude, or the
power, of the force; but not thedirection. With the dissipative
force, the direction was the opposite of the velocity. This was
obvious in the equation. The force in this situation however is
between the 2 bodies, so naturally,the equation will involve
subtracting the positions. Here it is:
where d is direction and L1 and L2 are the position vectors of
the bodies.
Now we will implement the global function to apply an attractive
force on two particles. We will
also have to modify the Particle class:
void applyAttractiveForce(Particle a, Particle b, float
strength, floatminDistance) {
PVector dir = PVector.sub(a.location, b.location);
-
8/8/2019 Creating a Particle System in Processing
12/24
float d = dir.mag();if (d < minDistance) d =
minDistance;dir.normalize();float force = (strength * a.mass *
b.mass) / (d * d);dir.mult(force);if (!b.fixed)
b.applyForce(dir);if (!a.fixed) {
dir.mult(-1f);a.applyForce(dir);
}}
public class Particle {PVector location;PVector velocity;PVector
acceleration;float mass;boolean fixed;
public Particle() {
location = new PVector(mouseX, mouseY);//get velocity from
direction and speed of mouse movementvelocity = new
PVector(mouseX-pmouseX, mouseY-pmouseY);acceleration = new
PVector(0, 0, 0);mass = 1;fixed = false;
}
public boolean exist() {if (fixed) {fill(255,0,0);
} else
{velocity.add(acceleration);location.add(velocity);acceleration.mult(0);fill(150);
}ellipse(location.x, location.y, 10, 10);return true;
}
void applyForce(PVector force)
{acceleration.add(PVector.div(force, mass));
}
}
I added a fixed property. If the Particle is fixed, it is not
affected by outside forces. They alsorender red.
As for the applyAttractiveForce(), for the most part, it follows
our two equations above. Thefirst thing to note is that we are
constraining the distance:
if (d < minDistance) d = minDistance;
-
8/8/2019 Creating a Particle System in Processing
13/24
This is because too small a distance value will create too large
a force and the particles will goflying off. Also notice that we
are applying equal but opposite forces on each particle:
if (!b.fixed) b.applyForce(dir);if (!a.fixed) {
dir.mult(-1f);
a.applyForce(dir);}
Now lets look at the whole thing. Check out this code in action
then come back and view the
source:
ArrayList particles;
Particle a;
void setup() {size(800,
600);stroke(0);strokeWeight(3);fill(150);smooth();
particles = new ArrayList();
a = new Particle();a.location = new PVector(width/2f,
height/2f);a.fixed = true;a.mass = 5.0;
particles.add(a);}
void draw() {background(255);for (int i = particles.size()-1; i
>= 0; i--) {Particle p = (Particle)particles.get(i);//
experiment w/ different friction
coefficientsapplyDissipativeForce(p, 0.01);//experiment with
strength and minDistance, try a minDistance below
30applyAttractiveForce(a, p, 500f, 50f);if(!p.exist())
{particles.remove(i);
}}
}
void mouseDragged() {particles.add(new Particle());
}
void applyDissipativeForce(Particle p, float friction) {PVector
f = PVector.mult(p.velocity, -friction);p.applyForce(f);
}
-
8/8/2019 Creating a Particle System in Processing
14/24
void applyAttractiveForce(Particle a, Particle b, float
strength, floatminDistance) {PVector dir = PVector.sub(a.location,
b.location);float d = dir.mag();if (d < minDistance) d =
minDistance;dir.normalize();float force = (strength * a.mass *
b.mass) / (d * d);dir.mult(force);if (!b.fixed)
b.applyForce(dir);if (!a.fixed)
{dir.mult(-1f);a.applyForce(dir);
}}
public class Particle {PVector location;PVector velocity;PVector
acceleration;
float mass;boolean fixed;
public Particle() {location = new PVector(mouseX, mouseY);//get
velocity from direction and speed of mouse movementvelocity = new
PVector(mouseX-pmouseX, mouseY-pmouseY);acceleration = new
PVector(0, 0, 0);mass = 1;fixed = false;
}
public boolean exist() {if (fixed) {fill(255,0,0);
} else
{velocity.add(acceleration);location.add(velocity);acceleration.mult(0);fill(150);
}ellipse(location.x, location.y, 10, 10);return true;
}
void applyForce(PVector force)
{acceleration.add(PVector.div(force, mass));
}
}
Hopefully this code is pretty easy to understand. Particle a is
the center red particle. We set its
location to the center of the screen, set it as fixed, then give
it a bigger mass. For every particle,we are applying both the
dissipative force and the attraction to particle a:
applyDissipativeForce(p, 0.01);
-
8/8/2019 Creating a Particle System in Processing
15/24
applyAttractiveForce(a, p, 500f, 50f);
Re-examining our Integration Technique
If you took the time to closely examine our technique for
determining a particles position at
each frame, you may have noticed some inaccuracies.L
ets use an analogy. Switch over yourthought process from 2d down
to 1d. Lets say we are in a car travelling down a road [iscommonly
described as if it is one dimension]. If we know the cars
acceleration, and we assume
that it is constant, we can theoretically calculate the position
after a given time with theequation:
where s is the distance, u is the initial velocity, a is the
acceleration, and t is time. So if wehave an initial velocity of0,
an acceleration of10 meters per second every second and we
travel
for10 seconds, we end up with a distance of500 meters. Now lets
try this with our
methodology. Here is a python script to simulate our
technique:
t = 0
vel = 0pos = 0acc = 10
while (t
-
8/8/2019 Creating a Particle System in Processing
16/24
vel = 30-
t = 4pos = 100
vel = 40
-t = 5pos = 150
vel = 50-
t = 6pos = 210
vel = 60-
t = 7pos = 280
vel = 70-
t = 8pos = 360
vel = 80-
t = 9pos = 450
vel = 90-
t = 10pos = 550
vel = 100-
Position = 550!?!? Why is it so far off? After 10 seconds in the
simulation we have already
drifted off 50 meters from where we should be. Another problem
we see is that this error isaccumulating [or compounding]. So as
time goes on, our calculations of the particles positions
will become farther and farther away from the truth. The
solution to this problem requires acloser examination of the
mathematics behind our process and Newtons Second Law in
general.
In the next article, I am going to attempt to explain how this
error occurs and how we can reduceit to a manageable level.
-
8/8/2019 Creating a Particle System in Processing
17/24
Creating a Particle System in Processing: Re-examining our
Integration
Technique
March 18th, 2010 Code, Java, Processing, Software
This article is one in a series of articles about particle
systems in Processing. To view the first ofthe series, click
here.
In the last article, we discussed forces and left off with
questions about our technique fordetermining the particles position
at each frame. It turns out that it was wildly inaccurate. In
this
article, I am first going to try to explain the mathematics
behind what we are doing and use thatknowledge to expose the source
of our problem. Then I am going to try to present a solution.
Where Does the Problem Come From?
Recall the equation I presented in the last article which gives
us distance given the state of a
body and a time period:
This equation gives us an exact distance for the given
acceleration, initial velocity, and timeperiod and we used it to
measure the error of our technique. So the question remains, why
not
use this equation to determine the particle position at each
frame? Well, the problem isunfortunately too complicated for me to
explain easily but I am going to try. From my
understanding, that equation only works when acceleration is
constant over time. If you take ahard look at it, this property
will become apparent. The equation gives you a distance for a
given
step of time but is not actually a continuous function with
respect to time. In other words, youcannot use it to solve
acceleration for any given point in time. In a particle system,
there may be
one to many forces acting on a given particle at any time. On
top of that, those forces arechanging the acceleration of the
particle in seemingly erratic ways. In fact, it is said that
the
function which determines the acceleration with respect to time
is well-defined but is actually
unknown. Therefore, we cannot get an exact value at any given
point, we can only approximate
it. Given that our calculations are approximations, we have to
assume there will always be anerror. All we can do is find
techniques to make the error manageable.
Solving Systems Governed by Unknown Functions
So, how exactly were we solving this unknown function before?
Lets step away from our
particle system for a very brief moment. You may remember from
high school maths that youcan solve the integral of a function by
integrating that function over an interval when given
boundary conditions. You may also remember that in certain
situations, such as when f(t, y) isunknown or cannot be solved
analytically, you can solve these problems by taking an initial
value and solving in steps. This is called an initial value
problem and follows this form:
-
8/8/2019 Creating a Particle System in Processing
18/24
Some tricky manipulating of this formula results in a series
which usually looks something likethis:
So, I am pretty bad at all this maths o_0 but hopefully you are
starting to see something here. Inthis series, we are determining
the next value [y_n+1] using the current value [y_n] and addingthe
differential function. Just like we did with our particles, we
found velocity by adding the last
velocity plus the difference in velocity[acceleration]. Then we
did the same for position.Acceleration is a second order derivative
so when using this method which solves first order
diffEQs, we must break it down into two first order
derivatives:
where v is velocity and p is position.
Now lets try and make sense out of this mess.
Eulers Method for Solving First Order Differential Equatons
You may not have known it, but the method we were using before
in our code is known as
Eulers Method and is the defacto, inherent approach to this
problem. The only thing I left out isthe time step. The actual
process should look something like this:
velocity.add(PVector.mult(acceleration,
h));location.add(PVector.mult(velocity, h));
where h is the time step in the simulation. As an astute reader,
you may realize that the h wasactually accounted for before. It was
just assumed to be 1 ;) The common way to make the
Euler method more accurate is to reduce the time-step [h]. I
will explain why in a second, letsjust quickly alter the code to
see what happens. Go check it out in action then come back and
examine the source:
ArrayList particles;
Particle a;
float h = 0.2; //new time step < 1
void setup() {size(600,
600);stroke(0);strokeWeight(3);fill(150);smooth();
particles = new ArrayList();
-
8/8/2019 Creating a Particle System in Processing
19/24
a = new Particle();a.location = new PVector(width/2f,
height/2f);a.fixed = true;
particles.add(a);}
void draw() {background(255);for (int i = particles.size()-1; i
>= 0; i--) {Particle p = (Particle)particles.get(i);//
experiment w/ different friction
coefficientsapplyDissipativeForce(p, 0.01);applyAttractiveForce(a,
p, 5000f, 50f);if(!p.exist()) {particles.remove(i);
}}
}
void mouseDragged() {particles.add(new Particle());
}
void applyDissipativeForce(Particle p, float friction) {PVector
f = PVector.mult(p.velocity, -friction);p.applyForce(f);
}
void applyAttractiveForce(Particle a, Particle b, float
strength, floatminDistance) {PVector dir = PVector.sub(a.location,
b.location);float d = dir.mag();if (d < minDistance) d =
minDistance;dir.normalize();float force = (strength * a.mass *
b.mass) / (d * d);dir.mult(force);if (!b.fixed)
b.applyForce(dir);if (!a.fixed)
{dir.mult(-1f);a.applyForce(dir);
}}
public class Particle {PVector location;PVector velocity;
PVector acceleration;float mass;boolean fixed;
public Particle() {location = new PVector(mouseX, mouseY);//get
velocity from direction and speed of mouse movementvelocity = new
PVector(mouseX-pmouseX, mouseY-pmouseY);acceleration = new
PVector(0, 0, 0);mass = 1;
-
8/8/2019 Creating a Particle System in Processing
20/24
fixed = false;}
public boolean exist() {if (fixed) {fill(255,0,0);
} else {velocity.add(PVector.mult(acceleration,
h));location.add(PVector.mult(velocity,
h));acceleration.mult(0);fill(150);
}ellipse(location.x, location.y, 10, 10);return true;
}
void applyForce(PVector force)
{acceleration.add(PVector.div(force, mass));
}
}
All I did was alter the integration part, added the h float at
0.2, and increased the strength to 5000
to speed things up a little. What you should have noticed is
that it has gotten a lot slower and it
should be obvious why: Our framerate is the same but we are
stepping ahead in the simulation insmaller steps of time.
What you probably did not notice is the huge increase in
accuracy. To prove this, lets re-implement our python script
experiment from the last article and compare it with the exact
results again. This time we will have a time step-size of
0.1:
t = 0h = 0.1
vel = 0pos = 0acc = 10
while (t
-
8/8/2019 Creating a Particle System in Processing
21/24
t = 0.1pos = 0.1
vel = 1.0-
t = 0.2
pos = 0.3vel = 2.0-
t = 0.3pos = 0.6
vel = 3.0-
t = 0.4pos = 1.0
vel = 4.0-
t = 0.5pos = 1.5
vel = 5.0-
.
.
.-
t = 9.6pos = 465.6
vel = 96.0-
t = 9.7pos = 475.3
vel = 97.0-
t = 9.8pos = 485.1
vel = 98.0-
t = 9.9pos = 495.0
vel = 99.0-
t = 10.0pos = 505.0
vel = 100.0
Position = 505. You may remember that using these initial values
with our equation:
-
8/8/2019 Creating a Particle System in Processing
22/24
yielded an exact end position of500. Now we are only offby 5
whereas with a time-step of 1we were offby 50! This should show you
that the error for this method is close to [i think?]:
There is a mathematical way to determine the real error but we
arent going to go into it becausewe will be abandoning this method
soon and it is too complicated for the little value it providesus.
If you really want to know, check out the Wikipedia article on
Eulers method.
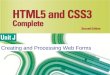
Why does a Smaller h Yield More Accurate results?
The question arises, why is it more accurate? The answer may
help you better understand what is
happening. Lets look at a graphic representation of the Euler
method in action:
Graphical representation of Euler's method (Source:
Wikipedia)
Pretend that the blue line is our unknown but well-defined
function in which the acceleration is
the dependent variable and that A0, A1, A2, A3, and A4 are the
acceleration values we calculate.Essentially, at each step, we know
the derivative [the tangent to the curve] and multiply it by
the
time step, then add it to the current A value to guess the next
value. At that point, we assume weare at the correct spot and do
this again and again and again. You can now see why the error
accumulates. We are basically walking a dark path using a slow
strobe light. Now imagine thatthe A values were taken in smaller
intervals [the strobe light is blinking faster] and you can see
that we would be closer to the blue line [exact solutions]. But
if you took a bigger step size, youwould be farther away from the
exact values. The following pictures illustrate the point
perfectly.
The red line is the exact solution and the blue is the
approximation:
-
8/8/2019 Creating a Particle System in Processing
23/24
big step of h
medium sized step of h
small step of h
-
8/8/2019 Creating a Particle System in Processing
24/24
tiny step of h
Here is the source of these photos.
So as h gets smaller, our approximated curve inches closer to
the exact curve.
Picking a NewMethod
Where do we go from here? Well, we have determined that the
Euler method is just not reallyfeasible. Sure, it may have worked
out for our little examples but we can achieve more stability
and accuracy with some other methods. Plus we cant pump up the
framerate enough to get arealistic speed. It just doesnt look
believable. In the next article, I am going to show you how to
implement the Runge-Kutta methods, particularly the Fourth Order
Runge-Kutta method. I amalso going to try to explain the
differences between implicit and explicit integration.