Embed Size (px)
Citation preview

Crane Operator Performance Comparing PD-Feedback Control and Input Shaping
Ajeya Karajgikar
(with Dr. Joshua Vaughan and Dr. William Singhose)
10th November, 2011
Weekly Group Meeting Presentation
Sensing Crane Payloads Can be Difficult
• Sensing hook and payload is not trivial even in ideal conditions
• Distinguishing between the hook and payload using machine vision can be difficult

Conflict Between Feedback and Human Operators
• Conceptual Block Diagram of the PD Crane Controller

Using Input Shaping to Reduce Unwanted Payload Oscillations
• Payload oscillation after a point-to-point move makes it difficult for accurate position while decreasing safety

Using Input Shaping to Reduce Unwanted Payload Oscillations
• Payload oscillation after a point-to-point move makes it difficult for accurate position while decreasing safety
• Input shaping can be used to solve this problem

Conflict Between Feedback and Human Operators
• Conceptual Block Diagram of Input-Shaping Controller
• Conceptual Block Diagram of the PD Crane Controller

10-ton Industrial Bridge Crane

Single Pendulum and Double Pendulum Effects
• Single Pendulum Case
• Double Pendulum Case

• Single Pendulum Case
• Double Pendulum Case
Single Pendulum and Double Pendulum Effects

Point-to-point movements (without shaping)
• Hook was moved from one point to another point over a distance of 3m manually

Point-to-point movements (PD-Feedback Control)
• Hook was moved from one point to another point over a distance of 3m manually

Point-to-point movements (with shaping)
• Hook was moved from one point to another point over a distance of 3m manually

Hook Angle Response Point-to-point movements
• Hook angle response when hook was moved from one point to another point over a distance of 3m manually

10-ton Industrial Bridge Crane and Obstacle Course

Example Operator Performance - Manual Control
• Unshaped response of hook position when an operator maneuvers through the obstacle course (t = 165s)

Example Operator Performance – PD-Feedback
• Unshaped response of hook position when an operator maneuvers through the obstacle course (t = 39s)

Example Operator Performance – Input Shaped
• Unshaped response of hook position when an operator maneuvers through the obstacle course (t = 40s)

Completion Times by each Operator
• Completion times of twelve novice crane operators

Average Completion Times• Completion time with PD-control was 74% less than
manual control (37s vs. 140s)• Input shaping further reduced the average completion
time to 32s, representing a 14% reduction from PD control and a 77% reduction from manual control

Distance Traveled – Unshaped
• Travel distance of trolley and hook by twelve novice crane operators
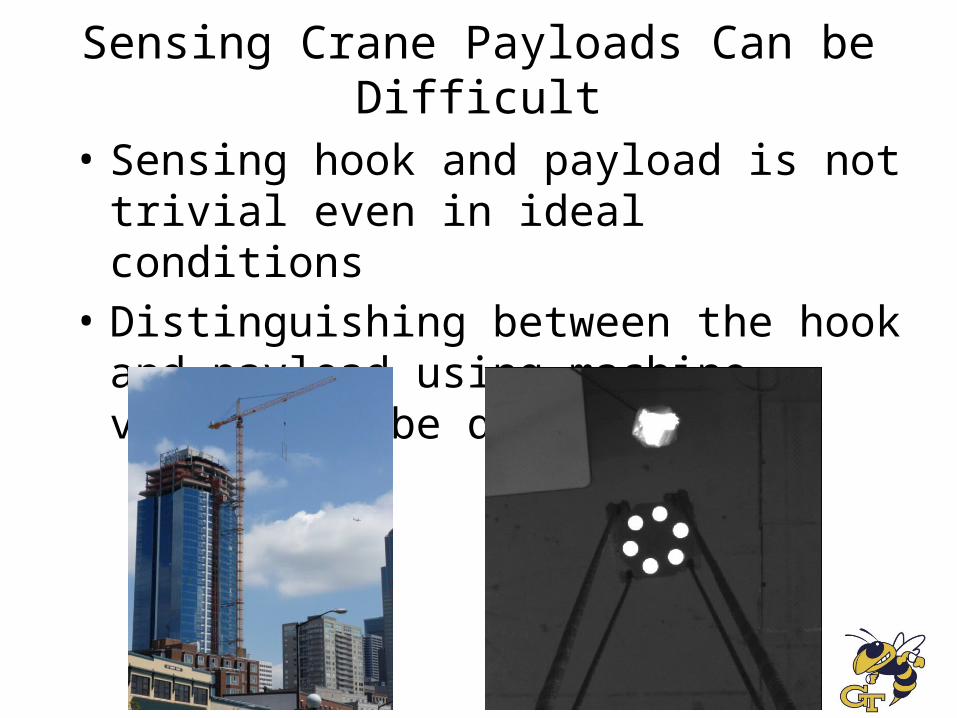
Distance Traveled – PD-Feedback
• Travel distance of trolley and hook by twelve novice crane operators

Distance Traveled – Shaped
• Travel distance of trolley and hook by twelve novice crane operators

Total Distance Traveled by Trolley• The shorter total travel distance afforded by
input shaping provides evidence that is more energy efficient than either manual control or PD control (9.52m vs 7.84m vs 7.51m)
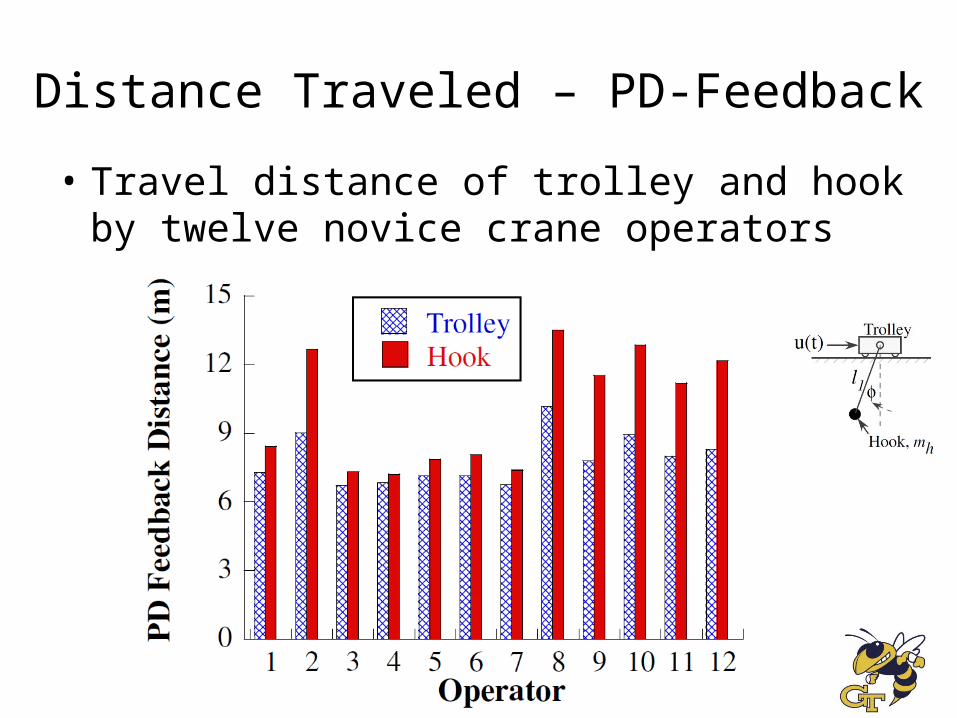
Total Distance Traveled by Hook• The shorter total travel distance traversed by
the hook shows how well the hook can track the desired path (60.33m vs 10.02m vs 7.79m)

Collisions by each Operator
• Collisions of twelve novice crane operators (Unshaped = 13; Feedback = 0; Shaped = 0)

Single Pendulum and Double Pendulum Effects
• Single Pendulum Case
• Double Pendulum Case

Point-to-point movements
• Point-to-point moves with controllers designed for Double Mode
• Point-to-point moves with controllers designed for Single Mode
• Point-to-point moves with controllers designed for Double Mode with changes in payload configuration
Point-to-point movements
• Point-to-point moves with controllers designed for Double Mode
• Point-to-point moves with controllers designed for Single Mode
• Point-to-point moves with controllers designed for Double Mode with changes in payload configuration

Point-to-point movements (without shaping)
• Hook was moved from one point to another point over a distance of 3m manually

Point-to-point movements (PD-Feedback Control)
• Hook was moved from one point to another point over a distance of 3m manually
(Double Pendulum gains)

Point-to-point movements (with shaping)
• Hook was moved from one point to another point over a distance of 3m manually
(Two Mode ZV Shaper)

Hook Angle Response Point-to-point movements
• Hook angle response when hook was moved from one point to another point over a distance of 3m manually

Point-to-point movements
• Point-to-point moves with controllers designed for Double Mode
• Point-to-point moves with controllers designed for Single Mode
• Point-to-point moves with controllers designed for Double Mode with changes in payload configuration

Point-to-point movements
• Point-to-point moves with controllers designed for Double Mode• Point-to-point moves with controllers designed for
Single Mode The masses are kept the same but the gain and
shaper parameters are changed• Point-to-point moves with controllers designed for
Double Mode with changes in payload configuration

Point-to-point movements (PD-Feedback Control)
• Hook was moved from one point to another point over a distance of 3m manually
(Single Pendulum gains)

Point-to-point movements (with shaping)
• Hook was moved from one point to another point over a distance of 3m manually
(One Mode ZV Shaper)

Hook Angle Response Point-to-point movements
• Hook angle response when hook was moved from one point to another point over a distance of 3m manually

Hook Angle Response Point-to-point movements

Point-to-point movements
• Point-to-point moves with controllers designed for Double Mode
• Point-to-point moves with controllers designed for Single Mode
• Point-to-point moves with controllers designed for Double Mode with changes in payload configuration

Point-to-point movements
• Point-to-point moves with controllers designed for Double Mode• Point-to-point moves with controllers designed for Single
Mode• Point-to-point moves with controllers designed for
Double Mode with changes in payload configuration Different masses were attached, but the gain and
shaper parameters were left unchanged mp was changed from 50 lbs to:
Case (1) 25 lbs and Case (2) 75 lbs Testing the robustness of the controller

Point-to-point movements (PD-Feedback Control)
• Hook was moved from one point to another point over a distance of 3m manually
(Double Pendulum gains, 25 lbs)

Point-to-point movements (with shaping)
• Hook was moved from one point to another point over a distance of 3m manually
(Two Mode ZV Shaper, 25 lbs)

Point-to-point movements (PD-Feedback Control)
• Hook was moved from one point to another point over a distance of 3m manually
(Double Pendulum gains, 75 lbs)
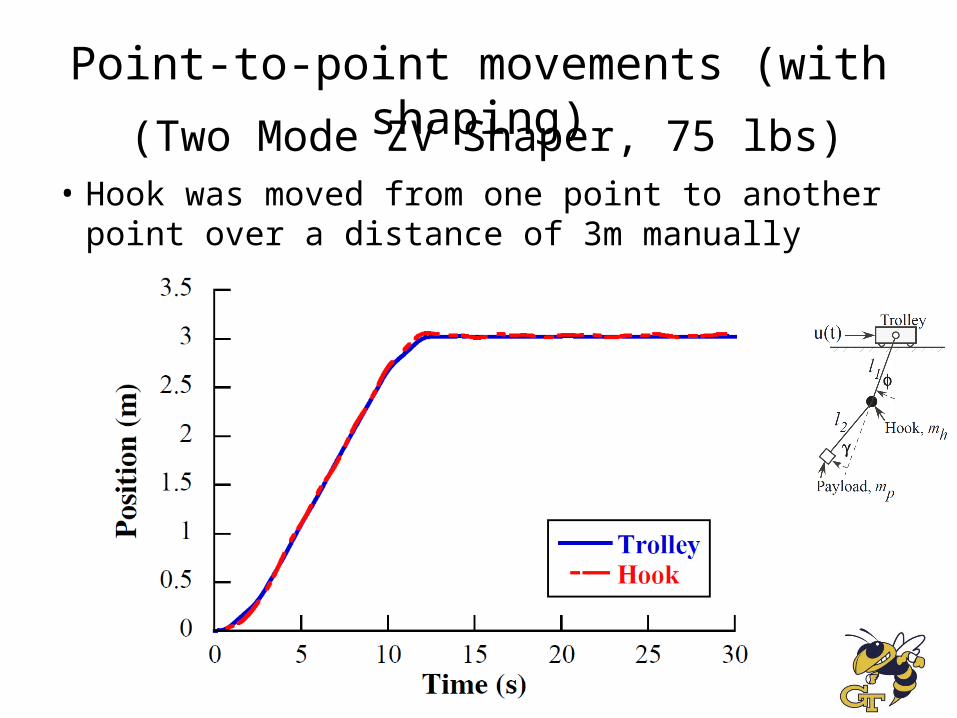
Point-to-point movements (with shaping)
• Hook was moved from one point to another point over a distance of 3m manually
(Two Mode ZV Shaper, 75 lbs)
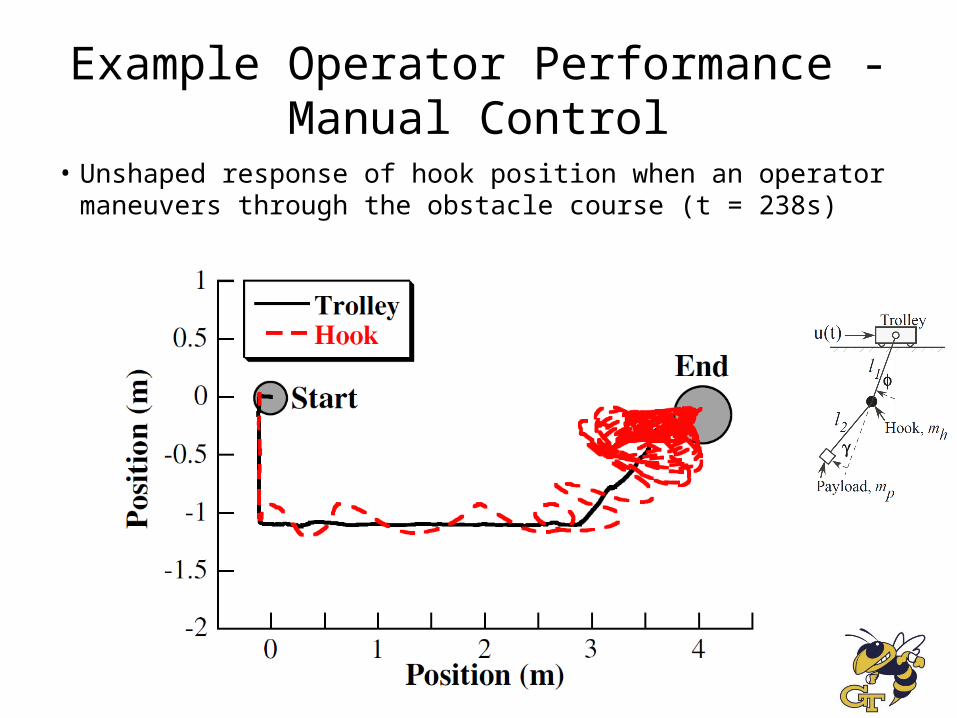
Example Operator Performance - Manual Control
• Unshaped response of hook position when an operator maneuvers through the obstacle course (t = 238s)

Example Operator Performance – PD-Feedback
• Unshaped response of hook position when an operator maneuvers through the obstacle course (t = 60s)

Example Operator Performance – Input Shaped
• Unshaped response of hook position when an operator maneuvers through the obstacle course (t = 35s)

Completion Times by each Operator
• Completion times of ten novice crane operators

Average Completion Times• Completion time with PD-control was 66% less than
manual control (55s vs. 161s)• Input shaping further reduced the average completion
time to 38s, representing a 31% reduction from PD control and a 76% reduction from manual control

Distance Traveled – Unshaped
• Travel distance of trolley and hook by ten novice crane operators

Distance Traveled – PD-Feedback
• Travel distance of trolley and hook by ten novice crane operators

Distance Traveled – Shaped
• Travel distance of trolley and hook by ten novice crane operators

Total Distance Traveled by Trolley• The shorter total travel distance afforded by
input shaping provides evidence that is more energy efficient than either manual control or PD control (9.52m vs 9.07m vs 7.88m)

Total Distance Traveled by Hook• The shorter total travel distance traversed by
the hook shows how well the hook can track the desired path (44.72m vs 14.17m vs 9.77m)

Collisions by each Operator
• Collisions of ten novice crane operators (Unshaped = 18; Feedback = 2; Shaped = 0)

Summary
• Both PD-Feedback control and Input Shaping significantly reduce oscillation
• Using PD-Feedback control presents difficulty in sensing payload and human operator compatibility problems
• Input Shaping produced the lowest average task completion times and shortest average trolley travel distance
• Input Shaping was the safest in terms of obstacle avoidance

Questions, comments, concerns?