Embed Size (px)
Citation preview

8/8/2019 Convergence Time Evaluation of AODV and AODV+G in MANETs
http://slidepdf.com/reader/full/convergence-time-evaluation-of-aodv-and-aodvg-in-manets 1/7
(IJCSIS) International Journal of Computer Science and Information Security,Vol. 8, No. 5, August 2010
1
Convergence Time Evaluation of AODV and
AODV+G in MANETs
Annapurna P Patil Harish.R Department of Computer Science and Engineering,
M.S. Ramaiah Institute of Technology,Bangalore-54,India.
[email protected] [email protected]
Abstract -Wireless mobile ad-hoc networks are characterized
as networks without any physical connections. In these networks
there is no fixed topology due to the mobility of nodes,
interference, mulitpath propagation and path loss. Hence a
dynamic routing protocol is needed for these networks to
function properly. Many routing protocols have been developed
for accomplishing this task. Selecting most appropriate routing
protocol for a particular network scenario is the critical issue.
Most attempts made at evaluating these algorithms so
far have focused on parameters such as throughput, packet
delivery ratio, overhead etc. An analysis of the convergence
times of these algorithms is still an open issue. The work carried
out fills this gap by evaluating the algorithms on the basis of
convergence time.
In this paper we present and examine the convergence
time evaluation of routing protocols AODV and AODV+G . The
algorithm performances are compared by simulating them in
ns2. Tcl is used to conduct the simulations, while perl is used to
extract data from the simulation output and calculate
convergence time. After extensive testing we observed that
AODV+G converged well in all situations than AODV. The
paper also evaluates the algorithms using the rudimentary
metrics-throughput and packet delivery ratio.
Keywords- Routing Protocols, MANETS, Convergence Time.
I. INTRODUCTION
A Mobile Ad-Hoc Network (MANET) is a self-
configuring network of mobile nodes connected by wireless
links, to form an arbitrary topology. The nodes are free to
move randomly. Thus the network's wireless topology may be
unpredictable and may change rapidly. Minimal
configuration, quick deployment and absence of a central
governing authority make ad hoc networks suitable for
emergency situations like natural disasters, military conflicts,emergency medical situations etc .
Every device in a MANET is also a router because it
is required to forward traffic unrelated to its own use. Almost
every year, the world is struck by numerous catastrophic
natural disasters, such as earthquake, hurricane, typhoon,
tsunami, etc. In such a situation communication systems,
fixed or mobile, were usually down due to various reasons.
The loss of communication systems as well as information
networks made the rescue operation extremely difficult.
WiFi-ready notebook PCs( MANET nodes) owned by rescue
volunteers themselves to construct a MANET to support such
a need.
MANET can be classified based on the
communication pattern or the devices used, the variants of
MANETs on the type of devices are sensor and ad hoc
networks. Routing is one of the critical issue in MANET.
Selecting the energy efficient routing protocols improves the performance of the communication. The routing protocols are
classified into three types. Proactive protocols maintain
routing information for all the destinations, and keep updating
this information through periodic updates, an example for this
protocol is DSDV[1],OLSR[3]. Reactive protocols don’t
maintain information for all the destination, rather they
discover the route to a destination on demand, an example for
this protocol is AODV[2]. Hybrid protocols attempt to
combine the advantage of both proactive and reactive
protocols, an example for this protocol is TORA[5], ZRP[4],
MPOLSR[6]. AODV+G[7] reduces unnecessary traffic will
effectively improve the efficiency of those mobile nodes in
network.AODV and AODV+G protocols performs differently
under different network scenarios. One protocol might
perform better than others in specific situation. These
protocols are compared in terms of convergence time to
uncover in which situations these types of algorithms have
their strengths and weaknesses.
II. RELATED WORK
There are many other works which are related to our
work in evaluating routing algorithms. [7] AODV and
AODV+G has been compared in terms of Average delay,
Packet delivery ratio, Normalized routing load and Routingload reduction, but not in terms of convergence time. [8]
AODV and DSDV has been compared in terms of
convergence time. Many papers have compared AODV with
other routing algorithms. In [9] AODV and DSDV have been
compared with average throughput, packet loss ratio, and
routing overhead as the evaluation metrics, [10] has compared
AODV and DSDV in terms of delay and drop rate, [11]
compares AODV and DSDV in terms of throughput, packets
received, delay and overload. Similarly, [12] compares
175 http://sites.google.com/site/ijcsis/ISSN 1947-5500

8/8/2019 Convergence Time Evaluation of AODV and AODV+G in MANETs
http://slidepdf.com/reader/full/convergence-time-evaluation-of-aodv-and-aodvg-in-manets 2/7
(IJCSIS) International Journal of Computer Science and Information Security,Vol. 8, No. 5, August 2010
2
AODV, DSDV and DSR in terms of throughput, delay, drop
rate.
III. PROTOCOL SPECIFICATION
This section gives the small presentation of two
protocols we evaluate in this paper.
A. AODV The Ad-hoc On-Demand Distance Vector (AODV)
routing protocol is designed for use in ad-hoc mobile
networks. AODV is a reactive protocol: the routes are created
only when they are needed. It uses traditional routing tables,
one entry per destination, and sequence numbers to determine
whether routing information is up-to-date and to prevent
routing loops.
An important feature of AODV is the maintenance
of time-based states in each node: a routingentry not recently
used is expired. In case of a route is broken the neighbours
can be notified. Route discovery is based on query and replycycles, and route information is stored in all intermediate
nodes along the route in the form of route table entries. The
following control packets are used: routing request message
(RREQ) is broadcasted by a node requiring a route to another
node, routing reply message (RREP) is unicasted back to the
source of RREQ, and route error message (RERR) is sent to
notify other nodes of the loss of the link. HELLO messages
are used for detecting and monitoring links to neighbours.
B. Gossiping & AODV+G
The basic gossiping protocol is simple. A source
sends the routing request with probability 1. When a nodefirst receives a routing request, with probability p it
broadcasts the request to its neighbors and with probability 1
– p it discards the request; if the node receives the same rout
request again, it is discarded. Thus, a node broadcasts a given
route request at most once. [7] proposes GOSSIP( p,k,m), an
extension to the basic gossiping, and suggests that:
A node broadcasts with probability 1 for the first k hops
before continuing to gossip with probability p.If a node with n neighbors receives a message and does not
broadcast it, but then does not receive the message from at
least m neighbors within a reasonable timeout period, it
broadcasts the message to all its neighbors [7].
Hass et al. implements GOSSIP( p,k,m) in Ad HocOn-Demand Distance Vector protocol (AODV) [18], a typical
and well-studied on-demond routing algorithm suited for
mobile nodes routing in ad hoc network. We refer this gossip-
based AODV as AODV+G. The experiments in [7] shows
that gossiping can reduce control traffic up to 35% when
compared to flooding and the most significant performance of
GOSSIP is achieved by taking p=0.65 , k=1 and m=1.
In AODV+G, if the expanding-ring search with a
smaller radius fails, rather than flooding to the whole
network, here GOSSIP3(.65,1,1) is used. The timeout period
of GOSSIP3 should be big enough to allow neighboring
nodes to gossip. The NODE_TRAVERSAL_TIME parameter
of AODV is a conservative estimate of the average one hop
traversal time for packets that includes queuing delays,
interrupt processing times and transfer times. GOSSIP3 is not
used in the expanding-ring search with a smaller radius, since
flooding is more efficient than gossiping for zone with small
radius because of the back-propagation effects[17]. The
variant of AODV that uses GOSSIP3 is called AODV+G.
IV SIMULATION AND PERFORMANCE ANALYSIS
A. Environment and Assumption
Simulator chosen : The proposed algorithms are simulated on
NS2(version 2.33)[13]. NS2 is popularly used in the
simulation of routing and multicast protocols, among others,
and is heavily used in ad-hoc networking research. nssupports an array of popular network protocols, offering
simulation results for wired and wireless networks alike. It
can be also used as limited-functionality network emulator. It
was necessary to use available implementations of algorithms
rather than implement them freshly ourselves, as it is
important for the acceptance of an evaluation that the
implementation used for evaluation has been scrutinized and
accepted as correct by the community. Else the evaluation
results will not be accepted as doubt will exist about the
correctness of the implementation of the algorithms
Algorithms chosen : Here in this paper we have selected to
simulate and evaluate the performance of AODV andAODV+G protocols. AODV is a reactive routing protocol and
AODV+G is variant of AODV routing protocol with
GOSSIP3. Further experiments can be built based on the
results of this project, to compare convergence time
performance of algorithms within the same category as well.
Mobility model : The Random Waypoint model is the most
commonly used mobility model in research community. At
every instant, a node randomly chooses a destination and
moves towards it with a velocity chosen randomly from a
uniform distribution [0,V_max], where V_max is the
maximum allowable velocity for every mobile node. After
reaching the destination, the node stops for a duration defined
by the 'pause time' parameter. After this duration, it again
chooses a random destination and repeats the whole process
until the simulation ends. To create Mobile node Movement Scenario files, the
command line that needs to be run under directory : ns-
allinone-2.33/ns-2.33/indep-utils/cmu-scen-gen/setdest :
./setdest [-n num_of_nodes] [-p pausetime] [-s maxspeed] [-t
simtime] [-x maxx] [-y maxy] > [output-file][14].
176 http://sites.google.com/site/ijcsis/
ISSN 1947-5500

8/8/2019 Convergence Time Evaluation of AODV and AODV+G in MANETs
http://slidepdf.com/reader/full/convergence-time-evaluation-of-aodv-and-aodvg-in-manets 3/7
(IJCSIS) International Journal of Computer Science and Information Security,Vol. 8, No. 5, August 2010
3
Traffic pattern : Moreover, traffic sources may generate
packets at constant bit rate (CBR), or at variable bit rate
(VBR). The CBR class is commonly used for voice and data
services. In this context, the data rate and the delay remain
constant during the packet transmission. More particularly,
CBR traffic sources provide a constant flow of data packets of
512 bytes with a transmission rate of 4 packets per second.
All CBR traffic scenarios ar e generated using cbrgen.tcl in
NS-2
To create CBR traffic scenario files, under directory
:ns-allinone-2.33/ns-2.33/indep-utils/cmu-scen-gen/cbrgen.tcl
./ns cbrgen.tcl [-type cbr|tcp] [-nn nodes] [-seed seed] [-mc
connections] [-rate packet/second for one connection] >
[output-file][14].
Network scenario : The simulations are conducted using the
network simulator ns2 [14]. Random Waypoint mobility
model is used. The physical layer simulates the behavior of
IEEE 802.11 (as included with ns2). Each node has a radio
range of 250 meter, and uses TwoRayGround as the radio propagation model.
All the scenarios are based on the following basic parameters:
cbr (constant bit rate) traffic
topology of size 500 m x 500 m
maximum speed of each node 20 m/s
simulation time 180s
transmission rate (packet rate) 10 m/s
The number of nodes is varied in the range [10,100] in steps
of 10 (to represent 10 node densities). Pause time is varied in
the range [0,180] in steps of 20 (to represent 10 pause times).
B. Performance Metric
A trace file contains a lot of information which may not be
required to analyze the performance of the protocol. We are
always interested in some amount of information that is
sufficient to predict the efficiency of the protocol. The
following performance metric is needed to be taken into
consideration in order to analyze and compare the
performance of AODV and AODV+G
Convergence Time : In [15], convergence time has been
defined as the time between detection of an interface being
down, and the time when the new routing information is
available. [16] defines a route convergence period as the
period that starts when a previously stable route to somedestination becomes invalid and ends when the network has
obtained a new stable route for. Similarly, we define
convergence time as the time between a fault detection, and
restoration of new, valid, path information. [15] calculates convergence time in the IP backbone.
The authors arrive at the value of convergence time by
deploying entities called ‘listeners’, which listen to every link
state PDU being sent by the is-is protocol. The time when the
first ‘adjacency down’ packet is observed is taken as the time
of detection of an interface being down. This failure event is
said to end when the listener receives link state PDUs from
both ends of the link.
We arrive at the convergence time by measuring the
interval between the detection of route failure and successful
arrival of a packet at the destination over the newly computed
route. This includes not only the routing convergence time,
but also the time taken for the packet to traverse the network
from the source to the destination over the newly discovered
path. Since this is a comparative analysis, and both the
routing protocols use shortest distance with number of hops as
the metric for distance calculation, both protocols will arrive
at the same new route, and the time taken to reach the
destination over this new route will be the same (since all
physical characteristics are the same). Hence this extra time
measured does not affect the comparative analysis.
In any case, the time taken for a packet to travel from
the source to the destination is negligible when compared to
the time taken for the algorithm to discover the new route,
either through route request – route reply sequences as inreactive protocols, or by waiting for an update that contains
new route information as in proactive protocols. Also, this
automatically verifies that the new path calculated is correct.
The cycle of invalidation of old path and discovery
of a new path might occur many times, and for many source-
destination pairs over the course of the simulation. Hence the
average value of these times is taken as the convergence time
of that algorithm for that scenario.
This procedure has been carried out in perl.
Throughput : If y number of packets delivered within t time
at a node then the throughput at the node could be defined as
y/t. By definition, the throughput needs to be calculated at the bottleneck node, not sender. For the throughput calculation, in
general divide the successfully received packets by the
simulation time will give the answer. In the trace file there are
different levels of received packets such as the RTR or AGT
level. The packets received by the node in its AGT level will
be the real received packets. Here these packets are filtered
from the trace file using perl script.
Packet Delivery Ratio : The ratio between the number of
packets successfully received by the application layer of a
destination node and the number of packets originated at the
application layer of each node for that destination.
V. EXPERIMENTAL RESULTS
Graphs are one of the ways to analyze and compare
the results of the trace file. Other methods can also be used
for comparison like tabular form showing required output
data of the trace file. Simple MS Excel or MATLAB also
work for plotting graphs. In this paper the graphs are plotted
using xgraph in NS2.
177 http://sites.google.com/site/ijcsis/
ISSN 1947-5500
8/8/2019 Convergence Time Evaluation of AODV and AODV+G in MANETs
http://slidepdf.com/reader/full/convergence-time-evaluation-of-aodv-and-aodvg-in-manets 4/7
(IJCSIS) International Journal of Computer Science and Information Security,Vol. 8, No. 5, August 2010
4
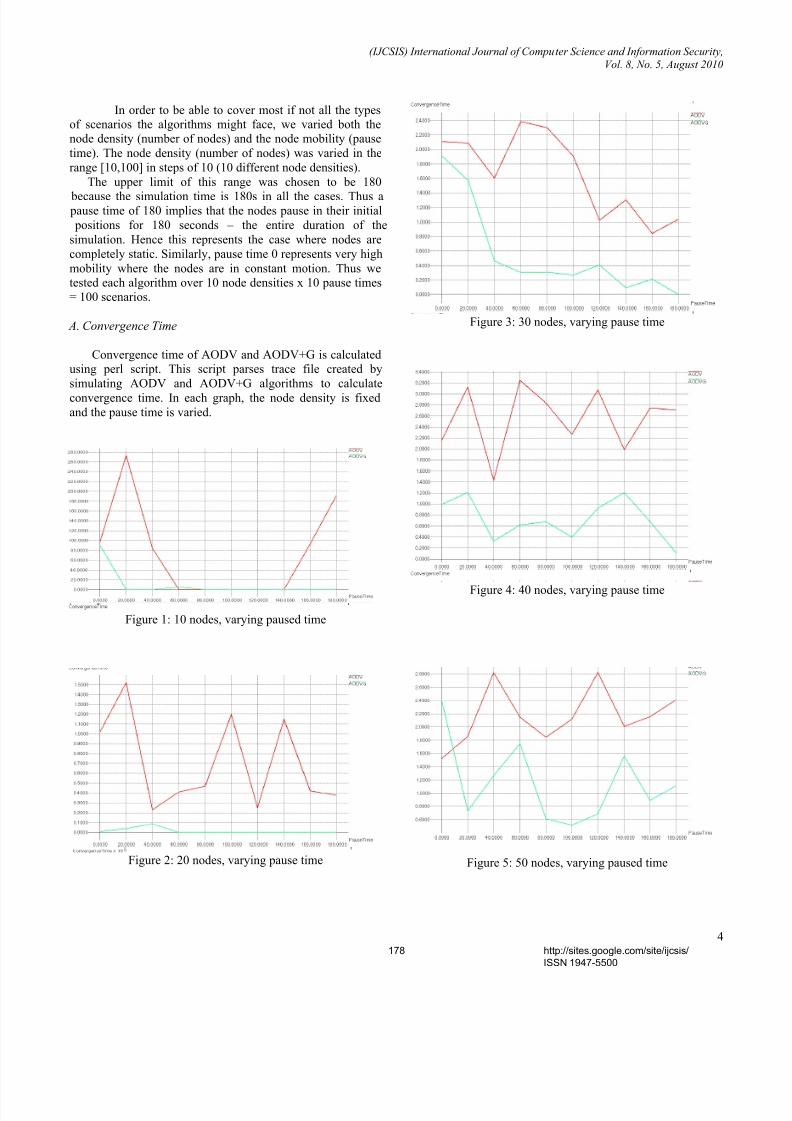
In order to be able to cover most if not all the types
of scenarios the algorithms might face, we varied both the
node density (number of nodes) and the node mobility (pause
time). The node density (number of nodes) was varied in the
range [10,100] in steps of 10 (10 different node densities).
The upper limit of this range was chosen to be 180
because the simulation time is 180s in all the cases. Thus a
pause time of 180 implies that the nodes pause in their initial
positions for 180 seconds – the entire duration of the
simulation. Hence this represents the case where nodes are
completely static. Similarly, pause time 0 represents very high
mobility where the nodes are in constant motion. Thus we
tested each algorithm over 10 node densities x 10 pause times
= 100 scenarios.
A. Convergence Time
Convergence time of AODV and AODV+G is calculated
using perl script. This script parses trace file created by
simulating AODV and AODV+G algorithms to calculateconvergence time. In each graph, the node density is fixed
and the pause time is varied.
Figure 1: 10 nodes, varying paused time
Figure 2: 20 nodes, varying pause time
Figure 3: 30 nodes, varying pause time
Figure 4: 40 nodes, varying pause time
Figure 5: 50 nodes, varying paused time
178 http://sites.google.com/site/ijcsis/
ISSN 1947-5500
8/8/2019 Convergence Time Evaluation of AODV and AODV+G in MANETs
http://slidepdf.com/reader/full/convergence-time-evaluation-of-aodv-and-aodvg-in-manets 5/7
(IJCSIS) International Journal of Computer Science and Information Security,Vol. 8, No. 5, August 2010
5
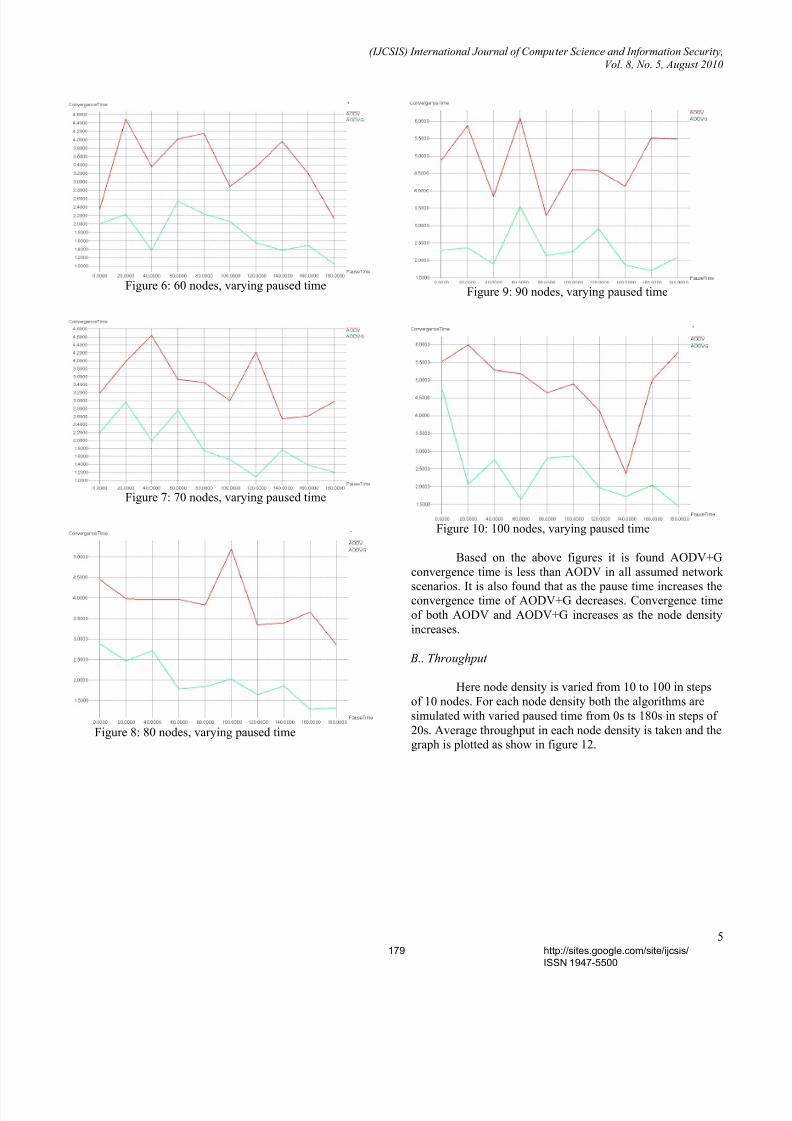
Figure 6: 60 nodes, varying paused time
Figure 7: 70 nodes, varying paused time
Figure 8: 80 nodes, varying paused time
Figure 9: 90 nodes, varying paused time
Figure 10: 100 nodes, varying paused time
Based on the above figures it is found AODV+G
convergence time is less than AODV in all assumed network scenarios. It is also found that as the pause time increases the
convergence time of AODV+G decreases. Convergence time
of both AODV and AODV+G increases as the node density
increases.
B.. Throughput
Here node density is varied from 10 to 100 in steps
of 10 nodes. For each node density both the algorithms are
simulated with varied paused time from 0s ts 180s in steps of
20s. Average throughput in each node density is taken and the
graph is plotted as show in figure 12.
179 http://sites.google.com/site/ijcsis/
ISSN 1947-5500

8/8/2019 Convergence Time Evaluation of AODV and AODV+G in MANETs
http://slidepdf.com/reader/full/convergence-time-evaluation-of-aodv-and-aodvg-in-manets 6/7
(IJCSIS) International Journal of Computer Science and Information Security,Vol. 8, No. 5, August 2010
6
Figure 12: Throughput AODV Vs AODV+G
From the above figure we observed that AODV with
the low density performance well than AODV+G. As the
node density increases AODV+G throughput increases. With
the node density more than 30 nodes the throughput of AODV+G is almost double than AODV.
C. Packet Delivery Ratio
Here node density is varied from 10 to 100 in steps
of 10 nodes. For each node density both the algorithms are
simulated with varied paused time from 0s ts 180s in steps of
20s. Average of packet delivery ratio in each node density is
taken and the graph is plotted as show in figure 11.
Figure 11: Packet Delivery Ratio AODV Vs AODV+G
From the above figure we observed that AODV with
the low density performs well than AODV+G. With the node
density more than 30 nodes packet delivery ratio of AODV+G
is more than AODV.
VI. CONCLUSION
AODV and AODV+G mobile Ad-hoc routing
protocols have been presented and evaluated using well know
network simulator NS2( version 2.33 ). AODV+G is gossip
based AODV, here GOSSIP3(.65,1,1) is used. These two
protocols are evaluated using the network performance metric
convergence time. Here we observed that AODV+G
converged well than compared to AODV in all assumed
network scenarios. We also noticed that with the very low
node density throughput and packet delivery ratio of AODV
is more than AODV+G. With node density more than 30
nodes AODV+G performs better than AODV. We can extend
our work to compare the performance of Adaptive Gossip-
based Ad Hoc Routing (AGAR) with Gossip-based Ad Hoc
Routing (AODV+G) using convergence time, throughput and
packet delivery ratio.
ACKNOWLEDGMENT
We wish to acknowledge our Principal Dr K Rajanikanth,
M. S .Ramaiah Institute of Technology,Bangalore-54 and
Professor and Head of the Department at CSE Prof .V.
Muralidharan for their encouragement which helped us
produce this work..
VII. REFERENCES
[1] Charles E.Perkins a nd Pravin Bhagwat, “Highly DynamicDestination-Sequenced Distance-Vector Routing (DSDV)for Mobille Computers ” In Proceeding of SIGCOM’ 94 Conference on Communications Architecture,
protocols and Applications August 1994.
[2]
“Ad hoc On Demand Distance vector (AODV)Routing protocol”, RFC 3561, july 2003.
[3] Jing Xie, Luis Girons Quesada and Yuming Jiang“A Threshold-based Hybrid Routing Protocol for MANET” Department of Telematics, Norwegian University of Science and Technology. 2008
[4] Nicklas Beijar, “Zone Routing Protocol (ZRP Networking Laboratory, Helsinki University of Technology. 1998
[5] [ns] MANET : TORA Routing Protocol at http://www.mail-archive.com/[email protected]/msg05173.html.
[6] Jiazi YI, Sylvain David, Asmaa Adnane, Benoit Parrein, “ Multipath-LSR. Simulation and Testpath”, 5th OLSR Interop/Workshop, Vienna,Austria (2009)
[7] Z. J. Haas, J. Halpern, and L. Li. Gossip-based ad hoc routing. IEEE Proceedings of INFOCOM , 2002.
[8]
Annapurna P Patil, Narmada Sambaturu, Krittaya Chunhaviriyakul,“Convergence Time Evaluation of Algorithms inMANETs”, (IJCSIS) International Journal of Computer Science andInformation security, julyb2009.
[9] R. Khalaf, A. El-Haj-Mahmoud, and A. Kayssi(Lebanon) “Performance Comparison of the AODV andDSDV Routing Protocols in Mobile Ad Hoc Networks”,
From Proceeding (371) Communication Systems and Networks – 2002.
180 http://sites.google.com/site/ijcsis/
ISSN 1947-5500
8/8/2019 Convergence Time Evaluation of AODV and AODV+G in MANETs
http://slidepdf.com/reader/full/convergence-time-evaluation-of-aodv-and-aodvg-in-manets 7/7
(IJCSIS) International Journal of Computer Science and Information Security,Vol. 8, No. 5, August 2010
7
[10] Ebrahim Mahdipour , Ehsan Aminian, Mohammad Torabi,Mehdi Zare, "CBR Performance Evaluation over AODV and DSDV in RW Mobility Model, "Computer and Automation Engineering, International Conference on, pp. 238-242, InternationalConference on Computer and Automation
Engineering (iccae 2009), 2009.[11] Muazzam Ali Khan Khattak, Khalid Iqbal, Prof Dr.
Sikandar Hayat Khiyal, “ Challenging Ad-Hoc Networksunder Reliable & Unreliable Transport with Variable NodeDensity”, Journal of Theoretical and Applied InformationTechnology, 2005-2008.
[12] REN Wei, YEUNG D.Y, JIN Hai1” TCP performanceevaluation over AODV and DSDV in RW and SN mobilitymodels” (School of Computer Science and Technology,Huazhong University of Science and Technology, Wuhan430074, China) (Department of Computer Science, HongKong University of Science and Technology, Hong Kong,China) 2005.
[13] The Network Simulator - ns-2 at http://www.isi.edu/nsnam/ns/
[14] Jaspreet kaur and Cheng Li, “ Simulation and analysis of Multicast protocols in Mobile Ad Hoc Networks using NS-2”,
Memorial University of Newfoundland St.John’s, Newfoundland,A1B 3X5, Canada, 2007
[15] G. Iannaccone, C.-N. Chuah, R. Mortier, S. Bhattacharyya, andC. Diot, “Analysis of link failures over an IP backbone,” in ACM SIGCOMM Internet Measurement Workshop (IMW), Nov. 2002.
[16] D. Pei, X. Zhao, L. Wang, D. Massey, A. Mankin, S. F. Wu, andL. Zhang, “Improving bgp convergence through consistencyassertions, ” in Proc. of IEEE INFOCOM , 2002.
[17] Zygmunt J. Haas , Senior Member, IEEE , Joseph Y. Halpern , Senior Member, IEEE , and Li (Erran) Li , Member, IEEE, “Gossip-Based AdHoc Routing”, IEEE/ACM TRANSACTIONS ON NETWORKING,VOL. 14, NO. 3, JUNE 2006
AUTHORS PROFILE
The authors are Faculty and Post graduate Student at M S
Ramaiah Institute of Technology, Bangalore working in the
area of performance evaluation of routing algorithms at the
R&D labs, Department of Computer Science and
Engineering.
181 http://sites.google.com/site/ijcsis/
ISSN 1947-5500