Embed Size (px)
Citation preview

Controllers for an Autonomous Vehicle Treating Uncertainties as DeterministicValues
by
Chan Kyu Lee
A dissertation submitted in partial satisfaction of the
requirements for the degree of
Doctor of Philosophy
in
Engineering - Mechanical Engineering
in the
Graduate Division
of the
University of California, Berkeley
Committee in charge:
Professor J. Karl Hedrick, ChairProfessor Francesco Borrelli
Professor Samer M. Madanat
Spring 2016

Controllers for an Autonomous Vehicle Treating Uncertainties as DeterministicValues
Copyright 2016by
Chan Kyu Lee

1
Abstract
Controllers for an Autonomous Vehicle Treating Uncertainties as Deterministic Values
by
Chan Kyu Lee
Doctor of Philosophy in Engineering - Mechanical Engineering
University of California, Berkeley
Professor J. Karl Hedrick, Chair
This thesis presents disturbance estimators and controllers for autonomous vehicles. In par-ticular, it focuses on a longitudinal distance controller and a lateral lane keeping controller.First, in order to estimate road bank angle as a disturbance term in the lane keeping con-troller, a kinematic relationship between road shape and sensor measurements was proposed.Utilizing longitudinal and lateral vehicle dynamics, longitudinal road gradient and lateralroad bank angle were estimated simultaneously using the Unscented Kalman Filter (UKF)approach. Second, a lane keeping controller associated with the road bank angle estima-tor was proposed. For the controller, a steady state dynamic vehicle model was derived todescribe lateral vehicle dynamics. A Receding Horizon Sliding Control (RHSC) approachwas implemented to guarantee simple formulation and easy constraint consideration for thereceding horizon technique.For the longitudinal control systems, the front vehicle’s future motion was considered as adisturbance term in a longitudinal distance controller for the ego vehicle. To predict the mo-tion, a new car-following model was proposed. To extract the current front vehicle driver’sdriving style, a driver aggressivity factor was derived and estimated in real-time through theUKF approach. Adopting a base car-following model and an aggressivity factor estimator onthe front vehicle, the front vehicle’s future motion sequence was propagated. Furthermore,as a distance controller associated with the front vehicle’s future motion, a Fuel EfficiencyAdaptive Cruise Control (ACC) was presented. A new fuel consumption model was includedin the optimization problem in order to improve fuel efficiency. The nonlinear Model Pre-dictive Control approach was applied to the controller, and the front vehicle’s future motionwas considered in the prediction horizon.Two disturbance estimators for longitudinal and lateral motion were verified under simu-lation and real vehicle tests in real-time. The lane keeping controller was proven to havebetter performance with the bank angle estimator on public roads. Furthermore, for a dis-tance controller, fuel economy using a Fuel Efficiency ACC has been verified in simulation.

i
Contents
Contents i
List of Figures iv
List of Tables vii
1 Introduction 11.1 Driver Assistance System and Self Driving Vehicle . . . . . . . . . . . . . . . 11.2 Lateral Vehicle Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 Disturbance of Lateral Vehicle Control . . . . . . . . . . . . . . . . . 31.2.2 Lane Keeping Control . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Longitudinal Vehicle Control . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3.1 Disturbance of Longitudinal Vehicle Control . . . . . . . . . . . . . . 51.3.2 Distance Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Contributions and Outlines . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Lateral Disturbance Estimation : Road Gradient Estimator 92.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Framework for a Disturbance Estimator Design using Dual Unscented Kalman
Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.3 Vehicle Kinematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.1 Step 1 : Motion in Vehicle-Frame-Fixed Coordinate with respect toInertial Coordinate . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3.2 Step 2 : Motion in Vehicle-Frame-Fixed Coordinate with respect toIntermediate Coordinate1 . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3.3 Step 3 : Motion in Vehicle-Body-Fixed Coordinate with respect toVehicle-Frame-Fixed Coordinate . . . . . . . . . . . . . . . . . . . . . 16
2.4 Vehicle Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4.1 Longitudinal Vehicle Dynamics . . . . . . . . . . . . . . . . . . . . . 172.4.2 Lateral Vehicle Dynamics . . . . . . . . . . . . . . . . . . . . . . . . 172.4.3 State Definition and Measurement . . . . . . . . . . . . . . . . . . . . 18
2.5 Estimator Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21

ii
2.5.1 Dual Unscented Kalman Filter Approach . . . . . . . . . . . . . . . . 222.5.2 Observability Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.6 Vehicle Model Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.6.1 Longitudinal Vehicle Model Validation . . . . . . . . . . . . . . . . . 242.6.2 Lateral Vehicle Model Validation . . . . . . . . . . . . . . . . . . . . 27
2.7 Vehicle Test Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.7.1 Essential Vehicle State Estimation Validation . . . . . . . . . . . . . 292.7.2 Vehicle Test on a Public Road . . . . . . . . . . . . . . . . . . . . . 31
2.8 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3 Lateral Motion Controller : Lane Keeping Controller associated withRoad Disturbance Estimator 373.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1.1 Motivation for a New Vehicle Dynamics Model . . . . . . . . . . . . . 373.1.2 Motivation for a New Control Law . . . . . . . . . . . . . . . . . . . 38
3.2 New Lateral Vehicle Dynamics Model . . . . . . . . . . . . . . . . . . . . . . 403.2.1 Current Vehicle Model of Lateral Vehicle Motion and Its Limitation . 403.2.2 Steady State Dynamic Model . . . . . . . . . . . . . . . . . . . . . . 423.2.3 Simulation and Vehicle Test for Steady State Dynamic Model Validation 463.2.4 Error Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.3 Lane Keeping Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.3.1 Control Law Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.3.2 Lane Keeping Controller . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.3.2.1 Controller Setup . . . . . . . . . . . . . . . . . . . . . . . . 513.3.2.2 Stability of the Controller . . . . . . . . . . . . . . . . . . . 54
3.4 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.4.1 Basic Control Performance . . . . . . . . . . . . . . . . . . . . . . . . 553.4.2 Bank Angle Effect Simulation . . . . . . . . . . . . . . . . . . . . . . 56
3.5 Vehicle Test Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.5.1 Vehicle Test on the Public Roads . . . . . . . . . . . . . . . . . . . . 593.5.2 Bank angle Effect . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4 Longitudinal Disturbance Estimation : Front Vehicle’s Future Motion 674.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674.1.2 Method for Prediction of the Front Vehicle’s Motion . . . . . . . . . . 68
4.2 Step 1 : Base Car-Following Model . . . . . . . . . . . . . . . . . . . . . . . 704.2.1 Literature Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.2.2 New Car Following Model . . . . . . . . . . . . . . . . . . . . . . . . 72
4.3 Step 2 : Aggressivity Factor Estimation . . . . . . . . . . . . . . . . . . . . . 754.4 Step 3 : Front Vehicle’s Future Motion Estimation . . . . . . . . . . . . . . . 78

iii
4.5 Vehicle Test Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 794.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5 Longitudinal Motion Controller : Fuel Efficiency ACC associated withFront Vehicle’s Future Motion 875.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 875.1.2 Framework of Fuel Efficiency ACC Controller . . . . . . . . . . . . . 88
5.2 Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 895.2.1 Fuel Consumption and Vehicle Model . . . . . . . . . . . . . . . . . . 895.2.2 Plant and Distance Dynamics . . . . . . . . . . . . . . . . . . . . . . 92
5.3 Distance Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 935.3.1 Control Law Design : Nonlinear Model Predictive Control . . . . . . 935.3.2 Controller without Optimal Gear Selection . . . . . . . . . . . . . . . 94
5.3.2.1 Control Goal . . . . . . . . . . . . . . . . . . . . . . . . . . 945.3.2.2 State Definition and System Dynamics . . . . . . . . . . . . 945.3.2.3 Nonlinear MPC . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.3.3 Controller with Optimal Gear Selection . . . . . . . . . . . . . . . . . 965.4 Simulation Results Using Real Traffic Data . . . . . . . . . . . . . . . . . . . 98
5.4.1 Distance Controller Validation under Normal Scenarios . . . . . . . . 985.4.2 Distance Controller without Optimal Gear Selection Using Real Traffic
Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.4.3 Basic Distance Controller with Optimal Gear Selection Using Real
Traffic Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1025.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
6 Conclusions and Future Work 1096.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1096.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
Bibliography 115

iv
List of Figures
1.1 Autonomous Vehicle Subsystems and Components . . . . . . . . . . . . . . . . . 21.2 Source of Disturbance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Bank Angle Effect of Lane Keeping Control . . . . . . . . . . . . . . . . . . . . 112.2 Framework for the Dual Unscented Kalman Filter . . . . . . . . . . . . . . . . . 112.3 Kinematics - Vehicle Side View . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Kinematics - Vehicle Rear View . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.5 Kinematics - Euler Angle Definition . . . . . . . . . . . . . . . . . . . . . . . . . 142.6 Lateral Vehicle Dynamics - Bicycle Model . . . . . . . . . . . . . . . . . . . . . 182.7 Lateral Vehicle Roll Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.8 Test Vehicle(Hyundai AZERA) . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.9 Reference Measurement Unit - GPS/IMU . . . . . . . . . . . . . . . . . . . . . 252.10 Vehicle Model Validation - Mechanical Efficiency . . . . . . . . . . . . . . . . . 262.11 Vehicle Model Validation - Air Drag Force and Rolling Resistance . . . . . . . . 262.12 Vehicle Model Validation - Brake Gain . . . . . . . . . . . . . . . . . . . . . . . 272.13 Vehicle Model Validation - Combined Longitudinal Dynamics . . . . . . . . . . 282.14 Vehicle Model Validation - Lateral Dynamics . . . . . . . . . . . . . . . . . . . . 282.15 Vehicle Test Facility - Hyundai California Proving Ground . . . . . . . . . . . . 292.16 Vehicle State Estimation Results . . . . . . . . . . . . . . . . . . . . . . . . . . 302.17 dSpace Microautobox . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.18 Vehicle Test Route . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.19 Vehicle Test Route - Road Shape . . . . . . . . . . . . . . . . . . . . . . . . . . 322.20 Vehicle Test Results - Road Gradient . . . . . . . . . . . . . . . . . . . . . . . . 342.21 Vehicle Test Results - Bank Angle . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.1 Kinematic Model of Lateral Vehicle Motion . . . . . . . . . . . . . . . . . . . . 403.2 Vehicle Model Limitation - 20km/h . . . . . . . . . . . . . . . . . . . . . . . . . 423.3 Vehicle Model Limitation - 60km/h . . . . . . . . . . . . . . . . . . . . . . . . . 433.4 Vehicle Model Limitation - 120km/h . . . . . . . . . . . . . . . . . . . . . . . . 433.5 New Vehicle Model Validation - 20km/h . . . . . . . . . . . . . . . . . . . . . . 463.6 New Vehicle Model Validation - 60km/h . . . . . . . . . . . . . . . . . . . . . . 473.7 New Vehicle Model Validation - 120km/h . . . . . . . . . . . . . . . . . . . . . . 47

v
3.8 New Vehicle Model Validation Test - 60km/h . . . . . . . . . . . . . . . . . . . 483.9 Error Dynamics of Path Following or Lane Keeping . . . . . . . . . . . . . . . . 493.10 Steering Actuator Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.11 Simulation Results - Lane Keeping Control with Initial Offset Error . . . . . . . 553.12 Simulation Results - Closed-loop vs. Open-loop . . . . . . . . . . . . . . . . . . 563.13 Simulation Results - On the curved road . . . . . . . . . . . . . . . . . . . . . . 573.14 Simulation Results - Shortest path On the curved road . . . . . . . . . . . . . . 573.15 Simulation Results - Bank Angle Effect . . . . . . . . . . . . . . . . . . . . . . . 583.16 Test Vehicle equipped with a Forward Looking Camera . . . . . . . . . . . . . . 593.17 Road Gradient Estimation in Real Time . . . . . . . . . . . . . . . . . . . . . . 603.18 Lane Keeping Control Results on a Public Road . . . . . . . . . . . . . . . . . . 613.19 Bank Angle Effect - Low Offset Error Gain . . . . . . . . . . . . . . . . . . . . . 623.20 Bank Angle Effect - High Offset Error Gain . . . . . . . . . . . . . . . . . . . . 633.21 Controller with Bank Angle Estimator . . . . . . . . . . . . . . . . . . . . . . . 643.22 Controller without Bank Angle Estimator . . . . . . . . . . . . . . . . . . . . . 65
4.1 Advantage of the Front Vehicle’s Future Motion Prediction - Early Braking . . . 684.2 Advantage of the Front Vehicle’s Future Motion Prediction - Smooth Velocity
Profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684.3 Definition of Control Variable for the Ego Vehicle . . . . . . . . . . . . . . . . . 734.4 Gain Scheduling of an ACC controller depending on Vehicle Speed . . . . . . . . 734.5 Definition of Control Variable for the Front Vehicle . . . . . . . . . . . . . . . . 754.6 Concept of Front Vehicle’s Future Motion Prediction . . . . . . . . . . . . . . . 784.7 Radar and its detection Coverage . . . . . . . . . . . . . . . . . . . . . . . . . . 794.8 Vehicle Test Route . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 804.9 State Estimation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 814.10 Aggressivity Factor Estimation Results . . . . . . . . . . . . . . . . . . . . . . . 824.11 Future Motion Prediction(0-250 sec) . . . . . . . . . . . . . . . . . . . . . . . . 824.12 Future Motion Prediction(40-100 sec) . . . . . . . . . . . . . . . . . . . . . . . . 834.13 Future Motion Prediction Error . . . . . . . . . . . . . . . . . . . . . . . . . . . 834.14 Future Motion Prediction Error Analysis . . . . . . . . . . . . . . . . . . . . . . 844.15 Future Motion Prediction Error Rate - Constant Acceleration Model vs. Car
Following Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.1 Framework of Fuel Efficiency ACC Controller . . . . . . . . . . . . . . . . . . . 895.2 Engine Fuel Consumption Map . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.3 Negative Fuel Consumption Avoiding . . . . . . . . . . . . . . . . . . . . . . . . 915.4 Framework of Optimal Gear Selection . . . . . . . . . . . . . . . . . . . . . . . . 975.5 Example of Optimal Gear Selection . . . . . . . . . . . . . . . . . . . . . . . . . 975.6 Scenario 1 - Positive Distance Error . . . . . . . . . . . . . . . . . . . . . . . . . 995.7 Scenario 2 - Accelerating and Braking . . . . . . . . . . . . . . . . . . . . . . . 995.8 Scenario 3 - Slow Moving Front Vehicle . . . . . . . . . . . . . . . . . . . . . . . 101

vi
5.9 Distance Control Using LQ Controller . . . . . . . . . . . . . . . . . . . . . . . 1035.10 Distance Control Using MPC Controller . . . . . . . . . . . . . . . . . . . . . . 1045.11 Distance Control Results Comparison - Velocity Profile for Braking Timing . . . 1055.12 Distance Control Results Comparison - Velocity Profile for Fuel Saving . . . . . 1055.13 Distance Control Results Comparison - Fuel Consumption . . . . . . . . . . . . 1065.14 Distance Control Considering Optimal Gear Selection . . . . . . . . . . . . . . . 1075.15 Distance Control Considering Optimal Gear Selection - Gear Stage . . . . . . . 1085.16 Distance Control Considering Optimal Gear Selection - Velocity Profile . . . . . 108
6.1 Timegap Variation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1126.2 Interested Vehicles for Lane Change . . . . . . . . . . . . . . . . . . . . . . . . . 113

vii
List of Tables
1.1 Related Factors for Drivers and Motorcycle Riders Involved in Fatal Crashes [49] 1
2.1 Scaling Factors and Weights . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.1 Simulation Setting of Scenario 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 985.2 Simulation Setting of Scenario 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.3 Simulation Setting of Scenario 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.4 Fuel Consumption Improvement of MPC Controller . . . . . . . . . . . . . . . . 1025.5 Fuel Consumption Improvement of MPC Controller with Optimal Gear Selection 102

viii
Acknowledgments
I would like to express sincere thanks to my advisor, Prof. J. Karl Hedrick, for his insightfulguidance and continuous support while conducting my doctoral study. I also would like tothank Prof. Francesco Borrelli for his invaluable advice and support on the findings pre-sented in this thesis. Further, I would like to thank Prof. Andrew Packard, Prof. Fai Maand Prof. Samer Madanat for serving as committee members in my qualifying examination.I would also like to thank Prof. Samer Madanat for serving as a dissertation committeemember.In addition, I would like to acknowledge all of my friends and colleagues in the VehicleDynamics & Control Laboratory and the Model Predictive Control Laboratory. Namely,Sanghyun Hong, Chang Liu, Andreas Hansen, Yi-Wen Liao, Yujia Wu, Donghan Lee,Yongkeun Choi, Jungeun Choi, Emmanuel Sin and Ashwin Carvalho. They have providedgreat support in my academic career and shared invaluable life experiences in Berkeley.I also want to express my gratitude to Hyundai Motor Company for their support of myresearch.Finally, I owe thanks to my wife, Seon Ji and my daughter, Onyu for being solid foundationwhile overcoming hardships during graduate study.

1
Chapter 1
Introduction
1.1 Driver Assistance System and Self Driving
Vehicle
In recent years, the automotive industry has made significant leaps in bringing new featuresfor Advanced Driver Assist System (ADAS) and Active Safety System (ASV) to market.Some well known examples of ADAS include Adaptive Cruise Control (ACC), that controlsspeed and safe distance, and Lane Keeping Assist (LKA), that allows cars to steer themselvesto maintain the lane. Furthermore, Forward Collision Warning (FCW) and Blind Spot De-tection(BSD) have been developed to support safe driving. These systems are very efficientin improving driver’s convenience and safety by assisting the driver’s control efforts and cor-rection decisions. Considering that most fatal crashes are generated from human error, asshown in Table 1.1, these systems have become very important features of the automobile.
Table 1.1: Related Factors for Drivers and Motorcycle Riders Involved in Fatal Crashes [49]
Factors PercentDriving too fast 19.9Under the influence of alcohol, drugs or medication 13.5Failure to keep in proper lane or running off road 8.3Failure to yield right of way 7.1Distracted (phone, talking, eating, object, etc) 6.6Operating vehicle in a careless manner 4.7Overcorrecting/oversteering 4.5Failure to obey traffic signs, signals, or officer 4.0Swerving or avoiding due to wind, slippery surface, etc 3.7Operating vehicle in erratic, reckless, or negligent manner 3.3

CHAPTER 1. INTRODUCTION 2
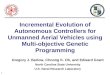
Digital Map Sensors
Radar
Lidar
Camera
Ultrasonic
DGPS
Vehicle Sensors
Controller
Perception
Decision
Control
- Distance
- Lane Keeping
- Lane Change
Actuator
Engine
Brake
Steering
Road/Regulation
Figure 1.1: Autonomous Vehicle Subsystems and Components
By combining such ADAS features, many automotive manufactures and suppliers are de-veloping Autonomous Vehicles (AV, also called automated or self-driving vehicles) that candrive by themselves, taking into account environmental data, including traffic conditions andregulations. The AV consists of several subsystems and components, such as a digital map,sensors, controllers and actuators as shown in Figure 1.1. This thesis mainly focuses on thecontroller aspect of the AV, and suggests some approaches to improve control performance.In the real world, autonomous vehicle control, performance can be affected by several fac-
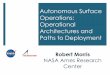
tors called external uncertainties or disturbances. There are various sources of uncertaintyfor the autonomous vehicle, such as neighboring traffic, road, the vehicle itself, and theweather, as shown in Figure 1.2. Under these uncertainties, it can be difficult to obtain goodcontrol performance, which can lead to dangerous situations for the occupants. Therefore,developing an uncertainty estimator and adopting its value in the controller to compensatefor the uncertainties, is valuable to obtain good control performance. This research suggestsnew algorithms to estimate the future motion of neighboring vehicles and the road geometry,treating them as longitudinal and lateral disturbances, respectively.

CHAPTER 1. INTRODUCTION 3
Road
- Road/Tire Friction
- Construction
- Road Geometry
Weather
- Wind
- Rain/Snow
Vehicle Itself
- Inertial Parameters
- Sensor/Actuator Performance
Neighboring Traffic
- Future Motion
- Future Traffic Sign
- Accident
Figure 1.2: Source of Disturbance
1.2 Lateral Vehicle Control
1.2.1 Disturbance of Lateral Vehicle Control
Prior research highlights that detection of the road bank angle and vehicle’s body roll is nec-essary for the satisfactory performance of lateral vehicle dynamics control systems [2][9][15].This is because the disturbances give additional lateral force to the vehicle. Although sev-eral methods to estimate the road bank angle have been proposed, the vehicle roll was eitherneglected or lumped with the road bank angle [16][17].However, it is difficult to differentiate between the road bank angle and the vehicle bodyroll angle by using typical roll related measurements, such as a lateral acceleration sensorsand a roll rate sensor. Since these sensors are usually attached to the vehicle body, roadgeometry and body motion both have the same effect on sensor readings. Therefore, roadbank angle and body roll cannot be separated directly using a kinematic relationship of theroll. While the road bank angle can be treated as a disturbance to the vehicle dynamics,the vehicle body roll angle is a state governed by lateral vehicle dynamics resulting from theroad bank angle and steering angle input. A parameterized vehicle dynamics model can beused to separate the vehicle’s body roll and road bank angle using additional measurementsfrom Global Positioning System (GPS) and Inertial Navigation System (INS) [17][18].Although this research starts from a proposed method in Ryu [17][18], the author did notconsider the longitudinal road gradient term which could affect the lateral force. Therefore,in this research, an estimator that can simultaneously estimate the road bank angle, roadgradient, and vehicle body roll, is introduced in order to determine the additional lateralforce on the vehicle.In addition, since GPS and INS, used in the prior research of [17][18], are not typically usedin mass production vehicles. this study aims to use only conventional sensors, such as wheelspeed sensors, yaw rate sensor, longitudinal and lateral acceleration sensors. This thesis

CHAPTER 1. INTRODUCTION 4
presents a novel approach to estimate road bank angle, road gradient and vehicle body rollsimultaneously using only these sensors.
1.2.2 Lane Keeping Control
The lane keeping control system is an example of a lateral vehicular motion control systemand is a very basic function of autonomous vehicles and driver assist systems. In order toimprove control performance of this system, disturbance terms such as the road gradientshould be considered in the controller. For this purpose, a model based controller can easilytake into account such disturbance values. A vehicle dynamics model including a disturbanceterm should be included in the controller.A dynamic vehicle model, derived from Newton’s laws of motion, is typically used for thelateral control of autonomous vehicles and driver assist systems [55][65]. Due to the occur-rence of a singularity at low speeds, the model is used only at high speeds over 40km/h.In addition, a kinematic vehicle model is derived from Ackermann steering geometry. Sincethe kinematic model is derived from the assumption that there is no tire side-slip angle, itis reliable under low speed situations such as those encountered by a smart parking assistsystem under limited tire side slip. However, at higher speeds, vehicle side-slip easily occursand this phenomenon violates the assumption of no tire side-slip.For these reasons, prior research conventionally used a kinematic vehicle model at low speedsand a dynamic vehicle model at high speeds. For an autonomous vehicle, two separate con-trollers, one at low and the other at high speeds, should be used and tuned. A comparisonbetween these two models is rarely found in prior research [6][37]. This thesis proposes anew vehicle model for use over all speed ranges.As a control method for the lane keeping control system, a conventional PID control approachand simple state feedback control law are usually adopted. Using the Model Predictive Con-trol (MPC) approach, an iterative linearized model from nonlinear system dynamics, is usedfor the control law [10][21]. But, in order to keep nonlinear system dynamics, Sliding ModeControl(SMC) can be considered for the control law.From the perspective of calculation cost, since the MPC approach requires very expensivecalculation costs, some research results [7][56] suggested computationally efficient method,such as Explicit MPC. In order to include the disturbance term in the controller, somemethods based on SMC and MPC are suggested. In the Sliding Mode Controller, a Distur-bance Observer can be included to reject not only mismatched disturbances but also otherdisturbances [39]. Specially, in the MPC formulation, the disturbance can be considered asa stochastic term [11] or a band [22] to guarantee robustness of the control performance,depending on the disturbance.In order to satisfy criteria such as low computational cost, nonlinear dynamics over recedinghorizon, disturbance rejection, and consideration of constraints, a combination logic betweensliding mode control and model predictive control is suggested [36]. Also, in A. Hansen andK. Hedrick [27], a discrete difference operator is used to adopt Receding Horizon Sliding

CHAPTER 1. INTRODUCTION 5
Control (RHSC) algorithm on a discrete time case. This thesis adopts the discrete RHSCapproach using a proposed vehicle dynamics model.
1.3 Longitudinal Vehicle Control
1.3.1 Disturbance of Longitudinal Vehicle Control
An Adaptive Cruise Control (ACC) system is a well known driver assist system for longi-tudinal position and speed control. It maintains the speed set by the driver and if thereexists a front vehicle, the system maintains a safe distance from the vehicle automatically.In order to detect the front vehicle, the system usually uses a forward looking radar. Fromthe radar, current relative distance and velocity between the controlled ego vehicle and thefront vehicle can be measured. Therefore, depending on the current motions of the vehicles,the ego vehicle can be controlled by the desired acceleration control input from the ACCalgorithm. The front vehicle’s future motion is one of the main disturbance terms for thesystem. This research uses a car-following model of the front vehicle to predict its futuremotion.Various simplified car-following models are proposed to describe a vehicle’s car following mo-tion [5][8][28][45]. The method in [46] suggests the car-following model as a kind of controlleror adaptive filter. In this approach, all parameters for each model were extracted from realcar-following data, and a representative equation was chosen.Recently, non-parametric approaches have been suggested for the car-following model. Themethod does not have any fixed equation at the beginning. But, using several sets of realdata, called training data sets, probability parameters are defined. In addition to the non-parametric model, combining probabilistic models under various situations using a hybriddynamical model was also suggested [19]. This approach is significant because the driver’sbehavior can be affected by various traffic situations. Furthermore, Artificial Neural Net-works [54], Gaussian Mixture Regression and Hidden Markov Models are alternative methodsfor stochastic representation of a vehicle’s motion.A number of research results compare the performance of the car-following models. Someresearch focus on parametric benchmarking [26][52][53]. For the non-parametric model com-parison, Angkititrakul [50] concluded that both approaches are very dependent on the sit-uation, and may not be feasible under heavy traffic conditions. Recently, Stephanie [63]compared the performance of both parametric and non-parametric approaches to predictthe following vehicle’s future movement. The results showed that the parametric models’performance was better than that of non-parametric models for short-term prediction under3 seconds. But, for long-term prediction, non-parametric models and advanced parametricmodels prove to be quite better than simple parametric approaches.This thesis introduces a new car-following model to describe the front vehicle’s car-followingmotion. Additionally, since the car-following model should be parameterized depending onthe current front vehicle driver, this thesis suggests a novel method to extract the current

CHAPTER 1. INTRODUCTION 6
vehicle driver’s driving style using an aggressivity factor. Finally, the front vehicle’s futurevelocity sequence is derived for a short time horizon within 2 seconds.
1.3.2 Distance Control
A conventional ACC System only ensures that the relative speed(preceding vehicle speed -ego vehicle speed) and relative distance error (relative distance - desired distance) converge tozero. However, this thesis introduces another feature of ACC - how the system can improvefuel efficiency while maintaining good control performance.For vehicles equipped with automatic speed and distance control functions, there are severalmethods to improve the ego (controlled) vehicle’s fuel consumption. First, if we know thetraffic signal and traffic conditions in advance, an optimal velocity profile can be generatedto minimize waiting time at stop lights and total fuel consumption [4][61]. The secondmethod considers road slopes [13][25][44]. This is reasonable because longitudinal tractionforce and fuel consumption are related to the incline-decline slope of the road profile. Thismethod is especially useful for heavy truck applications. Third, Vehicle to Vehicle (V2V)communication can be adopted for a platoon control system [23][41][68]. A platoon withcommunication can improve traffic efficiency and decrease vehicle to vehicle distance toreduce air drag force. Also, optimal gear shift selection considering fuel consumption, isanother approach for controlling vehicle speed [38].This research focuses only on the distance control scenario with preceding vehicle informationusing conventional sensors, such as a radar. Special information such as look-ahead trafficsignal and road shape were not considered in this research. Also, in order to focus on aconventional ACC systems, platoon and V2V communication were not explored. Therefore,we only have the current ego vehicle’s information, current relative distance and velocity tothe front vehicle. Since Jonathan [62] shows that fuel economy is highly related to driveraggressivity, a smooth car-following distance controller is desired. Also, in Lang’s research[42], the prediction of preceding driver behavior improved fuel efficiency for cooperativeadaptive cruise control systems. If the front vehicle’s future motions can be predicted, anoptimal distance and gear selection with smooth movement can be constructed.Therefore, this paper proposes an MPC approach, considering the front vehicle’s futuremotions and fuel efficiency.

CHAPTER 1. INTRODUCTION 7
1.4 Contributions and Outlines
In chapter 2, a road geometry estimator as a lateral disturbance estimator is developed basedon road-vehicle kinematics and lateral vehicle dynamics. The estimation algorithm:
• Proposes a kinematic relationship between the road shape and the sensor measurementsusing several coordinate systems. All measurements are gathered at the vehicle bodyusing only conventional vehicle sensors.
• Utilizes a lateral and a longitudinal vehicle dynamics model to describe vehicle’s mo-tion. In addition, vehicle body’s roll dynamics is included.
• Validates vehicle parameters for the dynamics equations using a test vehicle.
• Suggests a Dual Unscented Kalman Filter algorithm to estimate the longitudinal roadgradient, the lateral road bank angle, and the vehicle body’s roll angle simultaneously.
• Verifies the suggested algorithms on a real vehicle on a test track.
• Experimentally validates the performance of the proposed algorithms on public roadsin real-time.
In chapter 3, a lane keeping controller associated with the road disturbance estimator ispresented. The control algorithm:
• Proposes a steady state dynamics model to describe lateral vehicle dynamics over allspeed ranges, which is also useful to consider bank angle effect.
• Verifies the new lateral vehicle dynamics model using a simulation tool and real vehicletest. The results conclude that the proposed model is reasonable and accurate.
• Derives an error dynamics model of offset and heading errors for lane keeping and pathfollowing.
• Constructs a discrete Receding Horizon Sliding Control approach using a proposedlateral vehicle dynamics and error dynamics model. This control approach is simpleto formulate and easy to add constraints to for using the receding horizon technique.
• Verifies the suggested controller using a simulation tool and a real vehicle on a testtrack.
• Implements the controller on a real vehicle on public roads. Road bank angle estima-tion results are fed to the lane keeping controller to compensate for the lateral forcedisturbance effect. The proposed control logic is very effective to maintain the vehicle’sposition within a lane.

CHAPTER 1. INTRODUCTION 8
In chapter 4, the front vehicle’s future motion prediction algorithm as a longitudinaldisturbance estimator is developed. The algorithm:
• Proposes a new car-following model to describe the front vehicle’s longitudinal speedcontrol motion. It is a deterministic and parametric model, based on a well-tuned ACCsystem.
• Suggests a method for extracting the driver’s aggressivity factor. This method issignificant because each vehicle driver has a different driving style.
• Utilizes the UKF approach to extract the aggressivity factor in real time by comparingmeasurements and newly updated system states.
• Propagates the front vehicle’s future motion sequence using the new car following modeland the aggressivity factor.
• Validates the proposed algorithm on a real vehicle on public roads in real-time. Thealgorithm demonstrates good prediction performance for the next 2 seconds.
In chapter 5, a fuel efficiency ACC controller associated with the front vehicle’s future motion,is developed. The control algorithm:
• Utilizes a Nonlinear Model Predictive Control approach for a basic distance controllerwith fuel consumption model to improve fuel efficiency.
• Suggests a new fuel consumption model, derived from a real engine’s fuel consumptionmap.
• Verifies the logic with simulation. A sequence of the front vehicle’s future motion isfed to the distance controller. By considering the future motion in the optimizationproblem, the fuel efficiency ACC logic improved fuel economy by 3.67% under realtraffic data.
• Proposes a simple transmission gear selection logic to minimize fuel consumption. Thelogic compares shift-up and shift-down case costs in the optimization problem.
• Verifies the proposed logic. However,the optimal solution is unable to improve the fueleconomy as much as anticipated.

9
Chapter 2
Lateral Disturbance Estimation :Road Gradient Estimator
2.1 Introduction
For vehicle control systems, various states and environmental conditions should be consid-ered to guarantee desirable control performance. Effective operation of each control systemshould depend on accurate information of both the vehicle states and the vehicle parameters.Prior research focuses on estimating vehicle states such as side slip angle, longitudinal andlateral tire forces. Research has also been done on estimating parameters related to the vehi-cle and environmental conditions such as vehicle mass, tire-road friction, wind gust and roadgradient. From the perspective of improving safety, these factors are considered especiallysignificant for driver assistance systems and self driving vehicles. For example, vehicle side-slip angle is one of the most important states to consider in improving the performance of acontrol system designed to guarantee the stability of the vehicle lateral motion in emergencysituations. The side-slip data should be considered to reduce accidents and improve driver’ssafety. Also, longitudinal and lateral road gradients generate additional longitudinal andlateral forces to the vehicle body. Such additional forces can be considered as disturbanceterms of a controller for driver assistance systems such as Adaptive Cruise Control System(longitudinal controller) and Lane Keeping Assist System (lateral controller).To estimate vehicle states and parameters, research has been conducted using various ap-proaches. In this chapter, only the states and parameters related to lateral vehicle motioncontrol are introduced. Side-slip angle describes lateral motion of the vehicle and it can beestimated using a lateral accelerometer or a yaw rate sensor. However, these measurementscan easily be affected by disturbances such as road bank angle, road longitudinal gradientand vehicle roll induced by suspension deflection. Such inaccuracy in the measurements mayresult in false estimation of the vehicle states or misleading activation of the driver assistancecontrol systems. Therefore, the information of road bank angle, road gradient and vehiclebody roll are important for such systems.

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 10
Focusing only on the lateral disturbance term, numerous research results have pointed outthat detection of the road bank angle and vehicle roll is necessary for the satisfactory per-formance of the driver assistance control systems [2][9][15]. Several methods are proposedto estimate the road bank angle, but the vehicle roll induced by suspension deflection is ne-glected or lumped with the road bank angle [16][17]. However, it is difficult to differentiatebetween the road bank angle and the vehicle roll angle by using typical roll related mea-surements, such as lateral acceleration and roll rate sensor. Since the lateral accelerometerand the roll rate sensors are usually attached at the vehicle body, the road bank angle andvehicle roll have the same effect on the lateral acceleration measurements. Therefore, roadbank angle and body roll cannot be separated directly using kinematic relationships only.While the road bank angle can be treated as a disturbance term to the vehicle dynamics, thevehicle body roll angle is a state governed by lateral vehicle dynamics resulting from the roadbank angle and steering angle input. A parameterized vehicle dynamics model can then beused to separate the vehicle roll from road bank angle using additional measurements fromthe Global Positioning System (GPS) and the Inertial Navigation System(INS) [17][18].In Ryu [17][18], the results do not take into account the longitudinal road gradient term,which can affect lateral force with a cosine term multiplier, as shown in the following equa-tion.
Froad,y = m× g × sinφr × cos θr (2.1)
Froad,y is the lateral external force on the vehicle body due to vehicle mass(m), acceleration ofgravity(g), road bank angle(φr) and road longitudinal gradient(θr). In this research, an esti-mator that can simultaneously estimate the road bank angle, road gradient and vehicle bodyroll is introduced in order to determine the additional lateral force on the vehicle. In addi-tion, GPS and INS which have been used in prior research [17][18], are not the conventionalvehicle sensors used for the estimators. Therefore, in order to guarantee implementation ona mass production vehicle, only conventional vehicle sensors such as wheel speed sensors, ayaw rate sensor and a longitudinal sensor should be used for the estimator. Figure 2.1 showsthe bank angle effect of the lane keeping controller. On a curvy road, the road has a bankangle (especially with the longitudinal road gradient). While controlling a vehicle for lanekeeping or path following, the road shape is a disturbance term for the controller, and thecontroller exhibits some oscillations on the curvy road as shown in Figure 2.1. With the roadshape estimation results, a lane keeping controller is able to compensate for the lateral forcedue to bank angle and accurate control performance. As indicated above, road disturbanceestimation is worthwhile for a lane keeping controller. This section focuses on estimation ofFroad,y.First, based on vehicle kinematics, angular motion between the road shape and measurementsensors is defined. After the effect of vehicle dynamics on measurement sensors is consid-ered. Using kinematics and dynamics models, a dual Unscented Kalman Filter (UKF)-basedestimator is developed. Before implementing the estimator on the real vehicle, vehicle modelvalidation procedures are performed to determine vehicle parameters. Finally, vehicle testresults are presented.

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 11
Figure 2.1: Bank Angle Effect of Lane Keeping Control
[UKF]LongitudinalDynamics
[UKF]LateralDynamics
Input Input
Measurement Measurement
Figure 2.2: Framework for the Dual Unscented Kalman Filter

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 12
2.2 Framework for a Disturbance Estimator Design
using Dual Unscented Kalman Filter
For estimating the exact lateral disturbance force, longitudinal and lateral road shapes shouldbe considered simultaneously. Several approaches to the lateral disturbance estimation, suchas road bank angle and vehicle roll estimation, use an unknown proportional integral ob-server, which is a generalized version of the Luenberger observer [43][59]. This method wasdeveloped for the reconstruction of vehicle lateral dynamics states while the road bank an-gle is considered as signal faults acting as unknown inputs. For the observer, some statesshould be measured. However, direct measurement of some variables requires the use ofnonlinear equations and expensive sensors. To overcome difficulties in obtaining informa-tion with high accuracy and cost effectively, the Kalman Filter technique is commonly used.To adapt the Kalman Filter to a nonlinear system such as vehicle lateral dynamics, theExtended Kalman Filter (EKF) is used for estimation purposes [20]. However, since themodel’s behavior is strongly nonlinear and compromised of additive noise, a more accurategeneralization approach, the UKF was developed [57][67]. This approach shows fast conver-gence and robustness in the presence of a noise term [12][47].Longitudinal road gradient is generally considered as a driving load to the vehicle along withrolling resistance and aerodynamic drag forces. As a result, a very simple observer based onlongitudinal vehicle dynamics is designed [33][35].However, prior research has not considered combinational forces between longitudinal andlateral road gradient. A complete vehicle dynamics model considering both the longitudinaland the lateral motion should be considered for real time estimations. Such a model re-quires a higher order of states, and the respective UKF requires expensive calculation cost.In this paper, a dual-UKF approach adapted to be used in the estimators for longitudinalroad gradient and lateral bank angle, as shown in Figure 2.2, is introduced. Each UKFalgorithm uses prior information of the other UKF estimator’s result for updating currentstate estimation. UKF for longitudinal dynamics requires measurements of longitudinal ve-hicle speed(Vx) and acceleration(ax). Also, inputs of the estimator are engine speed(ωe),transmission turbine speed(ωt) and brake pressure(Pb). The estimator also requires lateralvehicle dynamics states from the lateral UKF. Lateral velocity(Vy), yaw rate(ψ) and roadbank angle(φr) are fed to the longitudinal UKF module. Finally, the longitudinal UKF canestimate longitudinal road gradient(θr) in real-time. The lateral UKF module’s frameworkis very similar to the longitudinal UKF. Measurements include lateral acceleration(ay) andyaw rate(ψ), which are located at the vehicle body. From the longitudinal UKF module,longitudinal velocity(Vx), longitudinal road gradient and its rate(θr, θr) are delivered to thelateral module. Also, steering input(δ) is the main control input for the lateral vehicle dy-namics. Then, current road bank angle(φr) can be estimated by the lateral UKF module. Toguarantee the implementation of the dual UKF on the real vehicle, only widely-used sensorssuch as wheel speed sensors, accelerometers, and a yaw rate sensor are used.

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 13
Figure 2.3: Kinematics - Vehicle Side View
2.3 Vehicle Kinematics
In this section, basic coordinates and the angular relationship between coordinates, basedon the vehicle kinematics model, will be introduced. In order to estimate the longitudinalroad gradient and lateral road bank angle, the relationship between the parameters and themeasurement sensors should be derived. As the accelerometers and a yaw rate sensor areinstalled at the vehicle body, sensor measurements can be defined with respect to the roadshape and vehicle motion. Figure 2.3 and Figure 2.4 show definitions of vehicle longitudi-nal motion and lateral motion. It neglects vehicle body’s pitch motion, but roll motion isconsidered. Also, three types of coordinates are used: Inertial Coordinate, which is a basecoordinate, Vehicle-Frame-Fixed Coordinate, which defines vehicle’s basic motion with re-spect to the road shape under the assumption that the vehicle is attached on the road, andVehicle-Body-Fixed Coordinate, which defines the vehicle roll motion. The 3-2-1 Euler Angledefinition was derived for a more convenient method to describe angular change, as shown inFigure 2.5. Yaw, pitch and roll motions are essential motions using additional Intermediate1and Intermediate2 coordinate systems. Furthermore, each motion can be transformed tothe other coordinates’ angles. Therefore, road shape and vehicle body’s roll motion can bedefined simultaneously with the coordinate definitions. We assume that the tires are alwayskept in contact with the road, which means that the vehicle-frame-fixed coordinates movesaccording to the road shape.Motion sensors are installed in the vehicle-body-fixed coordinate, but the road shape is de-fined in the inertial coordinate. Furthermore, the sensors can be governed by the roll motionof the vehicle body, which is defined with the vehicle-body-fixed coordinate system. As aresult, the relationship between the sensors and road shape or roll motion can be derivedwith coordinate transformation transformations.

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 14
Figure 2.4: Kinematics - Vehicle Rear View
Figure 2.5: Kinematics - Euler Angle Definition

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 15
2.3.1 Step 1 : Motion in Vehicle-Frame-Fixed Coordinate withrespect to Inertial Coordinate
The inertial coordinate is a coordinate that is applicable to the surface of the Earth. Then,the angular motion in the vehicle-frame-fixed coordinate can be defined with the Eulerangles(ψ, θ,φ). Then, the angular motions in the vehicle frame fixed coordinate are definedas following: φfθf
ψf
=
φ00
+ Tf/2T2/1
0
θ0
+ Tf/2T2/1T1/I
00
ψ
(2.2)
= Tf/e
φθψ
(2.3)
Now, considering reverse dynamics, angular velocity in the intermediate coordinate withEuler angles can be defined with Vehicle-Frame-Fixed Coordinate as followsφθ
ψ
= T−1f/e
φfθfψf
(2.4)
=
1 sinφ tan θ cosφ tan θ0 cosφ − sinφ0 − sinφ/ cos θ cosφ/ cos θ
φfθfψf
(2.5)
These Euler angles are connections to find a relationship between road shape and the vehicle’smotion.
2.3.2 Step 2 : Motion in Vehicle-Frame-Fixed Coordinate withrespect to Intermediate Coordinate1
Next, we consider the relationship between Euler angles and the road shape. Since the Eulerangle θ is not zero, the road bank angle(φr) is not same as φ. This is because the road bankangle is defined between the vehicle frame fixed coordinate and the intermediate coordinate1. Also, φr is not the same as φ, if θ is not zero. Therefore, in this step, angular motion ofthe vehicle-frame-fixed coordinate with respect to the inertial coordinate can be determinedin the intermediate coordinate1 as follows.φrθr
ψr
= T1/2
φ00
+
0
θ0
=
cos θφ
θ
− sin θφ
(2.6)

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 16
Using equations (2.5) and (2.6), the change rate of road shape, φr and θr, can be defined asthe following:
φr = φf cos θ + θf sinφ sin θ + ψr cosφ sin θ (2.7)
θr = 0 + θf cosφ− ψf sinφ (2.8)
As we do not know the exact values of Euler Angles θ and φ, the change rate of road shapecan be assumed as such:
φr ≈ φf + ε (2.9)
θr ≈ θf + ε (2.10)
2.3.3 Step 3 : Motion in Vehicle-Body-Fixed Coordinate withrespect to Vehicle-Frame-Fixed Coordinate
Now, we consider roll motion of the vehicle body. As before, conventional vehicle inertiasensors(yaw rate, longitudinal/lateral acceleration) are installed at the vehicle-body-fixedcoordinate. We can define roll motion of body(φv) with respect to the vehicle-frame-fixedcoordinate using transformation matrix Tv/f . xv
yvzv
= Tv/f
xfyfzf
Tv/f =
1 0 00 cosφv sinφv0 − sinφv cosφv
(2.11)
Therefore, angular velocity at the measurement point(sensors) can be defined with vehicle-frame-fixed coordinate as follows:φmθm
ψm
=
φv00
+ Tv/f
φfθfψf
=
φv + φfθf cosφv + ψf sinφv−θf sinφv + ψf cosφv
(2.12)
However, for the angular velocity measurements, only a yaw rate sensor is installed at thereal vehicle. Yaw rate, ψm can be obtained using the following equation:
ψm = −θf sinφv + ψf cosφv (2.13)
Finally, equations (2.9), (2.10) and (2.13) are used for the estimator to define a relationshipbetween road shape and measurement motion.

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 17
2.4 Vehicle Dynamics
In this section, simple longitudinal and lateral vehicle dynamics are introduced. The vehicledynamics define the vehicle’s motion by comparing the vehicle’s expected motion, determinedfrom dynamics, to the measured motion from the sensors, allowing for the estimation of roadshape.
2.4.1 Longitudinal Vehicle Dynamics
Longitudinal vehicle dynamics is affected by the road gradient. To obtain simple dynamicsequations, torque converter dynamics and wheel dynamics, considering the tire slip, wereneglected. First, the torque converter is assumed to be locked up. This means that the enginetorque can be transmitted to the wheel directly through the gear ratio of a transmission andfinal gear reduction of a differential gear set. Also, since the wheel dynamics are neglectedas well, mechanical efficiency, η, is added to the dynamics. Therefore, longitudinal vehicledynamics can be defined as follows:
ax =Fxm
=Fengine − Fbrake − Faero − Frolling + Froad,x
m(2.14)
Fengine = Teng ×Rg ×Rf ×Rw × η (2.15)
Fbrake = Kb × Pbrake (2.16)
Faero =1
2ρ× Ca × Afront × vx,f 2 (2.17)
Froad,x = m× g × sin θr × cosφr, (2.18)
where, ax is an acceleration term of the vehicle-frame-fixed coordinate. Fx, Fengine, Fbrake,Faero, Frolling and Froad,x are total longitudinal tractive force of the vehicle, traction forcesfrom engine, brake force, aerodynamic resistance force, rolling resistance force and drivingload due to the road gradient, respectively. The term m is the vehicle’s total mass. En-gine tractive force can be calculated with net engine torque(Teng), gear ratio(Rg), final gearreduction(Rf ) and wheel radius(Rw). Brake force is proportional to the brake pressure withbrake gain(Kb). Air drag force(Faero) can be calculated with air density(ρ), air drag forcecoefficient(Ca), frontal area of vehicle(Afront) and longitudinal velocity. In the dynamicsequations, input signals are engine torque, Teng, and brake pressure, Pbrake. As shown in theabove equations, road gradient, θr, is included in the longitudinal force term.
2.4.2 Lateral Vehicle Dynamics
For lateral vehicle dynamics, a simple bicycle model with a linear tire model is used, as shownin Figure 2.6. Lateral acceleration can be defined in terms of tire forces and additional force

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 18
Figure 2.6: Lateral Vehicle Dynamics - Bicycle Model
induced by road bank:
ay =Fym
=F fy + F r
y − Froad,ym
, (2.19)
where, tire force is proportional to the tire coefficients of the front and rear tire, Cf and Cr,and tire side slip angles, αf and αr. lf and lr are the distances to the front and rear tiresfrom the center of vehicle mass, respectively.
F fy = 2Cf · αf = 2Cf · (δ −
vy + lf ψ
vx) (2.20)
F ry = 2Cr · αr = 2Cr · (−
vy − lrψvx
) (2.21)
Froad,y = m× g × sinφr × cos θr, (2.22)
Also, vehicle body roll dynamics, as shown in Figure 2.7, should be considered for accurateestimation of the road bank angle. This is because the measurement sensor at the vehiclebody includes vehicle body’s roll motion as well as vehicle frame’s motion due to roadgeometry change. The roll dynamics can be defined as follows:
(Ixx +mshR)2(φv + φr) =− kφφv − cφφv+mshR{ g × cos θr × sin(φv + φr) + ay × cosφv} (2.23)
where Ixx is the moment of inertia along the x-axis of the vehicle. ms and hR are the sprungmass and the distance between roll center and center of vehicle mass, respectively. φv andφr are vehicle body’s roll motion and road’s roll motion(bank angle).
2.4.3 State Definition and Measurement
For the estimator setup, the system dynamics and measurement should be defined by states.Vehicle’s motion consists of not only the translational but also the rotational motion.

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 19
∅퐼푚
푘∅푏∅
ℎ
Figure 2.7: Lateral Vehicle Roll Dynamics
• Longitudinal dynamicsLongitudinal dynamics of the vehicle can be defined as follows:
x1 =vx,f = ax,f + ψf × vy,fx2 =vx,f
x3 =θr
x4 =θr
(2.24)
In the equations, x2 and x4 are assumed to be equal to zero. This implies that thestates have only the process noise. Also, x3 is a constant value, which is only affectedby x4 and the process noise.From the vehicle kinematics and state definition, sensor measurements can be definedas such:
ax,m = vx,v + θv · vz,v − ψv · vy,v≈ vx,f − {−θf × sinφv + ψf × cosφv} × vy,v≈ vx,f − {−θr × sinφv + ψf × cosφv} × vy,v= x2 − {−x4 × sinφv + ψf × cosφv} × vy,v + e1 (2.25)
vx,m ≈ vx,f
= x1 + e2, (2.26)
For the longitudinal motion, an accelerometer and wheel speed sensor are used. Finally,the relationship between the measurements and the states are clearly found in equations(2.25) and (2.26).

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 20
• Lateral dynamicsLateral dynamics for the vehicle including the bicycle model and roll dynamics can bedefined as follows. Translational and angular motion are also considered.
x1 = vy,f = ay,f − ψf × vx,fx2 = vy,f
x3 = ψf =1
Izz{lf × (F f
y −mf × g × sinφr × cos θr)
−lr × (F ry −mr × g × sinφr × cos θr)}
x4 = φr (2.27)
x5 = φv
x6 = φv =1
(Ixx +mshR)2{−kφφv − cφφv
+mshR( g × cos θr × sin(φv + φr) + ay × cosφv)} − φr
≈ 1
(Ixx +mshR)2{−kφφv − cφφv
+mshR( g × cos θr × sin(φv + φr) + ay × cosφv)}
Similar to the longitudinal motion, x2 and x4 are considered equal to zero. Also, x5 isa constant value, that is only affected by x6 and the process noise.Relevant measurements are lateral acceleration and yaw rate. These values can bedefined with lateral dynamics states as follows:
ay,m = vy,v + ψv · vx,v − φv · vz,v≈ (vy,f + hRφv)− {−θf × sinφv + ψf × cosφv} × vx,f≈ (vy,f + hRφv)− {−θr × sinφv + ψf × cosφv} × vx,f= (x2 + hRx6)− {−θr × sinx5 + x3 × cosx5} × vx,f + e1 (2.28)
ψm = −θf sinφv + ψf cosφv
≈ −θr sinφv + ψf cosφv
= −θr sinx5 + x3 cosx5 + e2 (2.29)
Finally, the relationship between the measurements and the states is clearly found inequations (2.29) and (2.30).

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 21
2.5 Estimator Design
In this section, the UKF approach for the estimator and its observability is described.Longitudinal and lateral vehicle dynamics equations are compactly written as the continuousstate space model :
xlong(t) = Flong(xlong(t), ulong(t), wlong(t))
wlong(t) = 0 (2.30)
ylong(t) = Glong(xlong(t), xlong(t), ulong(t))
xlat(t) = Flat(xlat(t), ulat(t), wlat(t))
wlat(t) = 0 (2.31)
ylat(t) = Glat(xlat(t), xlat(t), ulat(t))
As shown in the previous section, some states that need to be estimated have been definedwith constant values such as:
wlong(t) = [θr, θr]T
wlat(t) = [φv, φv, φr]T
Note that the time derivative of w is zero.Using Euler forward discretization, the discretized state space representation of the contin-uous model is :
xlong(k + 1) = xlong(k) + τs × Flong(xlong(k), ulong(k), wlong(k)) + vlong(k)
wlong(k + 1) = wlong(k) + rlong(k) (2.32)
ylong(k) = Glong(xlong(k), xlong(k), ulong(k)) + elong(k)
xlat(k + 1) = xlat(k) + τs × Flat(xlat(k), ulat(k), wlat(k)) + vlat(k)
wlat(k + 1) = wlat(k) + rlat(k) (2.33)
ylat(k) = Glat(xlat(k), xlat(k), ulat(k)) + elat(k)
These state space equations can be summarized to be the representative equations for adual-UKF:
s = [xlong, wlong, xlat, wlat]T
s(k + 1) = s(k) + τs × F (s(k), u(k), w(k)) + v(k)
= T (s(k), u(k), w(k)) + v(k) (2.34)
w(k + 1) = w(k) + r(k) (2.35)
d(k) = G(s(k), s(k), u(k)) + e(k), (2.36)
where τs is the sampling time, v and r are the process noises, and e is the measurementnoise. The noises v, r and e are assumed to be white, stationary, and normally distributed

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 22
with zero mean. The state space equations are used for the estimation of the states s, andthe disturbance term, w.
2.5.1 Dual Unscented Kalman Filter Approach
As implied from the previous section, the relationship between the vehicle states and themeasurements can be clearly defined with the noise terms. Also, the UKF algorithms forthe longitudinal and the lateral state estimations can be executed. Although some variablesmay be coupled with each other in the dual-UKF framework, by using the previous step’sstate estimation result for the coupled states, the dual-UKF framework can be decoupled.The basic concept of this framework is similar to the research of Sanghyun Hong and ChanKyu Lee [58]. Also, the following explanation of the UKF approach has been referenced fromHong [58], Julier [57] and Wan [67]. The main advantages of the UKF approach are thatit has a second-order accuracy for the nonlinear dynamics system, and its implementationis simplified using the Unscented Transformation (UT), as shown in Table 2.1. The UTconserves nonlinearity of the system and measurement dynamics through the statistics of arandom vector.
Table 2.1: Scaling Factors and Weights
λ = α2(L+ κ)− LW
(m)0 = λ
L+λ
W(c)0 = λ
L+λ+ 1− α2 + β
W(m)i = W
(c)i = 1
2(L+λ), i = 1, ..., 2L
The procedure of the UKF approach consists of two stages: prediction before the mea-surements and update after the measurements. It’s procedure is the same as that of thetraditional Kalman Filter approach, except that the UT is used to calculate the covarianceof the state. The detailed algorithm has been skipped in this section.
2.5.2 Observability Analysis
This section demonstrates that the disturbance w can be uniquely determined with themeasurement d. Since the state space model is a nonlinear function in terms of w and d, itwill be presented that w is locally observable with the measurement d = G(s, s, u).By investigating the rank of an observability codistribution matrix, the local observabilitycan be proven as described in [30][48]. If the observability codistribution matrix has fullrank, w is said to be locally observable.

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 23
Define a vector O consisting of the measurement vector d and its time derivative d,
O :=
[G
G
].
The observability codistribution matrix is defined as the Jacobian of O with respect to theparameter vector w,
∇O =[∂O∂w1
, · · · , ∂O∂wn
].
For the longitudinal UKF algorithm, the observability codistribution matrix can be deter-mined as the following:
∇Olong =[∂Olong
∂θr,∂Olong
∂θr
]
=
g cosφr cos θr sinφv × vy,f
0 0∂ax∂θr
∂ax∂θr
g cosφr cos θr 0
.The ∂ax
∂θrand ∂ax
∂θrterms have the input information term, u. If the input u is not zero, the
codistribution matrix has full column rank. This proves the local observability of w basedon d. For the lateral local observability, the same theory can be applied using the followingvector. As before, the Jacobian is full column rank and the lateral disturbance can be locallyestimated.
∇Olat =[∂Olat
∂φv, ∂Olat
∂φv, ∂Olat
∂φr
]
=
0 hR −g cos θr cosφr
−θr cosφv − ψf sinφv 0 0∂ay∂φv
∂ay
∂φv
∂ay∂φr
0 0 0

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 24
Figure 2.8: Test Vehicle(Hyundai AZERA)
2.6 Vehicle Model Validation
In order to achieve good disturbance estimation results, all vehicle states and parametersshould have accurate values. In this section, vehicle parameters related to longitudinaland lateral vehicle dynamics are verified using real vehicle test results. Then, vehicle stateestimation results, except for road disturbance, are validated on a flat road.The test vehicle, Hyundai AZERA, is pictured in Figure 2.8. Also, for the measurementof reference values, OTS (Oxford Technical Solutions) RT2002 with a GPS base-station isused, as shown in Figure 2.9. The OTS RT2002 system is comprised of a differential GPS,an IMU (Inertial Measurement Unit) and a DSP (Digital Signal Processor).
2.6.1 Longitudinal Vehicle Model Validation
In equations (2.14) to (2.18), there are some fixed parameters and variant parameters underdifferent conditions. Using the test vehicle, essential parameters for the longitudinal vehicledynamics have been verified.
• Mechanical EfficiencyMechanical efficiency can be shown in equation(2.15). As shown in the upper figure ofFigure 2.10, The car was driven with constant gas pedal manipulation. Also, enginetorque and gear ratio information is transmitted to the vehicle information network(CAN - Controller Area Network). From the information, the mechanical efficiencycould be estimated by comparing the measured values and the calculated values of thevehicle acceleration and velocity. The results are shown in the bottom graph of Figure2.10. The estimated value of mechanical efficiency is 0.9 at 6th gear stage and 0.85 at

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 25
GPS/IMU
Figure 2.9: Reference Measurement Unit - GPS/IMU
4th and 5th gear stages.
• Air Drag Force and Rolling ResistanceAs shown in equations (2.14) and (2.17), there exist an air drag force and rollingresistance. Parameters for the air drag force are fixed values and known for the testvehicle. So, only the rolling resistance force was needed to be verified. The vehiclewas driven in the neutral gear stage to avoid the engine torque’s effect on the vehicle’sacceleration. Also, the brake pedal was not pressed, so the vehicle exhibited a ”coastdown” condition under the air drag resistance and the rolling resistance. As shown inFigure 2.11, the rolling resistance force was calculated at 191N. Although the valuedepends on the vehicle speed, a fixed value was used.
• Brake GainAs shown in equation (2.16), brake gain, Kb should be estimated. The vehicle wasdriven in neutral gear stage to avoid engine braking when the brake pedal was pressed.When the brake pedal was pressed, the master cylinder brake pressure reached 40bar,as shown in the Figure 2.12. Then, the measured values and the calculated values,determined using equations (2.14)and (2.16) of the acceleration and the velocity, werecompared. As a result, the brake gain was found to be 210N/bar. On the bottomgraph of Figure 2.12, the red line shows simulation results using the validated brakegain.
• Combined DrivingUnder the combined driving condition consisting of acceleration and braking, the model

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 26
0 2 4 6 8 10 120
50
100
150
200
Time[s]
Eng
ine
Tor
que[
Nm
]Vehicle Model Validation : Longitudinal
0 2 4 6 8 10 1250
60
70
80
Time[s]
Vel
ocity
[km
/h]
Net Engine Torque
MeasuredCalculated
Figure 2.10: Vehicle Model Validation - Mechanical Efficiency
0 5 10 1555
56
57
58
59
60
61
62
63
64
65
Time[s]
Vel
ocity
[km
/h]
Vehicle Model Validation : Longitudinal Speed
MeasuredCalculated
Figure 2.11: Vehicle Model Validation - Air Drag Force and Rolling Resistance

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 27
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
10
20
30
40
Time[s]
Bra
ke P
ress
ure[
bar]
Vehicle Model Validation : Longitudinal Speed
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
20
40
60
80
Time[s]
Vel
ocity
[km
/h]
Master Cylinder Brake Pressure
MeasuredCalculated
Figure 2.12: Vehicle Model Validation - Brake Gain
validation results using the estimated vehicle parameters are shown in Figure 2.13. Thecalculated vehicle motion using the validated vehicle parameters is nearly the same asthe measured values. Consequently, the validated parameters are reasonable to be usedfor the vehicle dynamics estimator.
2.6.2 Lateral Vehicle Model Validation
For lateral vehicle dynamics, equations (2.19) to (2.22) were used. For lateral vehicle modelvalidation, only the lateral tire side-slip coefficients, Cf and Cr needed to be determined,since the other values were fixed kinematic values. The tire coefficient of the linear lateraltire model depends on the vehicle’s suspension, tire, and road characteristics. In order toget the value, the vehicle was driven at a constant speed and made a double lane change.Comparing the measured values and the calculated values (using equation(2.19) to (2.21))for the lateral acceleration and yaw rate, Cf and Cr were found to be 63000N/rad and70000N/rad, respectively. As shown in Figure 2.14, when the validated parameters wereused, the simulation results of the lateral vehicle dynamics matched the measurement values.

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 28
0 2 4 6 8 10 12 14 16 18 20−100
0
100
200
300
Time[s]
Eng
ine
Tor
que[
Nm
]
Vehicle Model Validation : Longitudinal
Net Engine Torque
0 2 4 6 8 10 12 14 16 18 200
10
20
30
Time[s]
Bra
ke P
ress
ure[
bar]
Master Cylinder Brake Pressure
0 2 4 6 8 10 12 14 16 18 20−50
0
50
100
Time[s]
Vel
ocity
[km
/h]
MeasuredCalculated
Figure 2.13: Vehicle Model Validation - Combined Longitudinal Dynamics
0 2 4 6 8 10 12 14 16−6
−4
−2
0
2
4
Acc
el[m
/s2 ]
Time[s]
Vehicle Model Validation : Lateral Acceleration
0 2 4 6 8 10 12 14 16−50
0
50
Ang
le A
ccel
[deg
/s2 ]
Time[s]
Vehicle Model Validation : Yaw Angle Acceleration
MeasuredCalculated
MeasuredCalculated
Figure 2.14: Vehicle Model Validation - Lateral Dynamics

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 29
Figure 2.15: Vehicle Test Facility - Hyundai California Proving Ground
2.7 Vehicle Test Results
For vehicle testing, the Hyundai AZERA is used with conventional vehicle sensors for esti-mation and measurement. The OXT RT2002 GPS/IMU is used for reference values only. Inthis section, the results of validation testing on a special testing ground for the basic stateestimation logic is presented. Then, results from tests on public roads are presented.
2.7.1 Essential Vehicle State Estimation Validation
In the longitudinal and lateral UKF estimation logics, the longitudinal road gradient andthe lateral road bank angle are the states to be estimated. These two states are consideredas part of the disturbance term of the vehicle dynamics. The dual-UKF algorithms’ mainpurpose is to estimate these two values as states in real-time. Before verifying the logic,the other states, except the road disturbances, are validated. This validation process wasperformed on a special test track where the road is nearly flat. A straight test track of theHyundai California Proving Ground (CPG) as shown in Figure 2.15, was used. Figure 2.16shows the state estimation results using the dual-UKF algorithm. The test vehicle was drivenon the flat ground and maneuvered several double lane changes with brake manipulation atthe end. For the reference measurement, RT2002 was used. The very top graphs shows thesteering input of the test scenario. The second and third graphs show very good estimationresults for longitudinal and lateral velocity, respectively. These two velocity terms can alsobe used for calculation of vehicle side-slip, which is one of the main dynamic behaviors ofthe vehicle. The side-slip angle can be defined as follows,
β := tan−1 vyvx
(2.37)

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 30
0 5 10 15 20 25 30-1000100Angle[deg] 0 5 10 15 20 25 30050Vx [km/h] 0 5 10 15 20 25 30-202Vy [km/h] 0 5 10 15 20 25 30-20020Yaw Rate[deg/s
] 0 5 10 15 20 25 30-505Side Slip[deg] 0 5 10 15 20 25 30-505Roll Angle[deg] Time[s]
Steering Wheel AngleMeasured VxEstimated VxMeasured VyEstimated VyMeasured Yaw RateEstimated Yaw RateMeasured Side SlipEstimated Side SlipMeasured Body RollEstimated Body RollFigure 2.16: Vehicle State Estimation Results

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 31
Figure 2.17: dSpace Microautobox
In the fourth graph, the estimated side-slip angle is very similar to the measurement values.Also, the fourth graph shows the estimation results of yaw rate. The estimated results showthe vehicle’s lateral motion accurately. The bottom graph shows the estimated body rollangle. The roll dynamics of the vehicle as shown in the equation (2.23) is also included. In theestimation graph, the estimated value has a slight delay compared to the measurement value,while the magnitudes of both estimated and measured values are nearly the same. However,since the roll angle is very small under normal driving conditions, the estimation delay doesnot significantly affect the estimation of road bank angle. Therefore, we can conclude thatthe estimator, without the longitudinal road gradient and the road bank angle, exhibits verygood performance.
2.7.2 Vehicle Test on a Public Road
After the validation tests of the essential state estimators at the special proving ground,CPG, the logic is tested on public roads to estimate the road longitudinal gradient and bankangle. For logic implementation in real-time, a dSpace Microautobox was used. It was in-stalled in the trunk as shown in Figure 2.17, and the logic was run every 0.02 seconds.Figure 2.18 shows a public road where the estimator was validated in real-time. The road
is a part of highway I-580 near Berkeley in California, USA. There are some curvy roads andchanges in altitude as shown in Figure 2.19. Due to the curvy roads, road bank angle canbe found using road information from the policy of Highway Design Manual[1]. Also, due tothe altitude change, the longitudinal road gradient can be detected.Figure 2.20 and 2.14 show vehicle test results for each of the longitudinal and lateral estima-tors. The test was performed for about 400 seconds. As shown in the top graph of Figure2.20, the vehicle was driven at about 100km/h and the brake pedal was pressed twice, fol-lowed by acceleration to recover speed. The second and third graphs show engine torque,which were gathered from the Engine Management System and brake pressure, which wasobtained from the Electrical Brake System. Under this driving condition, the longitudinal

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 32
Figure 2.18: Vehicle Test Route
-122.39-122.38-122.37-122.36-122.35-122.34-122.33-122.32-122.31 -122.3 -122.2937.8737.8837.8937.937.9137.9237.9337.94
Longitude[deg]Latitude[deg]
Vehicle Trajectory
0 5 10 15 20 25 30 35 40 45 50
37.8737.8837.8937.937.9137.9237.9337.94Altitude[m]
AltitudeFigure 2.19: Vehicle Test Route - Road Shape

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 33
road gradient is estimated as shown in the fourth graph. The value perfectly estimates themeasured value from the RT2002. The very bottom graph shows the estimator’s perfor-mance. The mean value of the estimation error is 0.09 degree, and the standard deviationis 0.39 degree. It can be concluded from the results that the longitudinal road gradientestimator has good performance under real road conditions.The top graph of 2.14 shows the steering wheel angle, and the second graph shows the es-timated body roll angle and road bank angle. As shown in the graph, body roll angle isvery small under normal driving conditions, as expected. The third graph shows the com-parison between the measured values and the estimated values of the summation of the roadbank angle and the body roll angle. Since the reference measurement equipment RT2002 isinstalled at the vehicle body, the equipment can only measure the combined body roll androad bank angle. As a result, only the combined values can be analyzed. The estimatorvery accurately estimates road bank angle changes. The bottom graph shows estimationerror whose mean is 0.08 degrees and the standard deviation is 0.6 degrees. Therefore, weconclude that the lateral road bank angle estimator can extract accurate road bank anglein real-time on general public roads. Finally, the longitudinal and lateral estimators areexecuted simultaneously in real-time.

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 34
0 50 100 150 200 250 300 350 4006080100120Velocity [km/h]
0 50 100 150 200 250 300 350 400-2000200400Torque[Nm] Time[s]
0 50 100 150 200 250 300 350 40001020
Brake Press[bar]
0 50 100 150 200 250 300 350 400-505Angle[deg]
0 50 100 150 200 250 300 350 400-505Angle[deg] Time[s]
Vehicle SpeedEngine TorqueBrake Pressure
Measured Road GradientEstimated Road GradientEstimation Error
Figure 2.20: Vehicle Test Results - Road Gradient

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 35
0 50 100 150 200 250 300 350 400-10010Angle[deg]
0 50 100 150 200 250 300 350 400-10010Angle[deg]
0 50 100 150 200 250 300 350 400-10010Angle[deg]
0 50 100 150 200 250 300 350 400-505Angle[deg] Time[s]
Steering Wheel AngleBody Roll Angle(estimated)Road Bank Angle(estimated)
Measured(Bank Angle+Body Roll)Estimated(Bank Angle+Body Roll)Estimation Error
Figure 2.21: Vehicle Test Results - Bank Angle

CHAPTER 2. LATERAL DISTURBANCE ESTIMATION : ROAD GRADIENTESTIMATOR 36
2.8 Conclusion
This chapter proposed a kinematic relationship between the road shape and sensor mea-surements using several coordinate systems. All measurements were gathered at the vehiclebody using only conventional vehicle sensors. Utilizing the vehicle longitudinal and thelateral dynamics, the longitudinal road gradient and the lateral road bank angle were es-timated simultaneously. In order to preserve nonlinearity of the kinematics and dynamics,the dual-UKF approach was suggested. After verifying the proposed estimation approach ona special proving ground, the estimators were tested on public roads. The results indicatethat the estimator accurately extracts the longitudinal road gradient and the bank anglesimultaneously on public roads in real-time.

37
Chapter 3
Lateral Motion Controller : LaneKeeping Controller associated withRoad Disturbance Estimator
3.1 Introduction
In this chapter, a lateral vehicular motion control logic is presented. A lane keeping controlsystem is a very basic function of an autonomous vehicle or a driver assistance system. Inorder to improve the control performance of the system, disturbance terms such as roadgradient should be considered. For this purpose, a model-based controller can easily takeaccount of these disturbances. This means that a vehicle dynamics model including thedisturbance term should be considered in the controller design. The control logic in thischapter is associated with the disturbance estimator, which was presented in the previouschapter. In this chapter, the motivation for a new vehicle dynamics model is introduced andthen a new control law is presented. Then, the new model and the control law is presentedin detail. Finally, the simulation and vehicle test results are described.
3.1.1 Motivation for a New Vehicle Dynamics Model
A dynamic vehicle model has been used for the lateral control of an autonomous vehicle suchas a lane keeping system or other driver assistance systems [55][65]. The dynamics equationfor the lateral motion of the vehicle uses Newton’s laws. In the dynamics equation, the tireside-slip angle, which is defined as an angle difference between the orientation of the tire andthe direction of the velocity vector of the wheel, is used for lateral tire force calculation. Thisis defined as a linear tire model. The tire side-slip angle is generated by the driver’s steeringmanipulation or by the yaw rate generated under certain driving conditions. Therefore,many lateral control systems are designed to operate even if there exists high speed, largesteering angles or sudden yaw rate variations. This is the reason why the dynamic model

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 38
has been widely used for lateral control logics. Dynamic models use a nonlinear tire modelsuch as Pacejka or Fiala tire model, but including these linear or nonlinear tire models inthe vehicle dynamics equations has its disadvantages. It is computationally expensive, andany tire model becomes singular at low vehicle speeds. The latter happens because, in thevehicle dynamics, vehicle side slip, which is defined as a ratio of lateral vehicle velocity overlongitudinal vehicle velocity, is included. This disadvantage prohibits the use of the lateralcontroller at low speeds such as urban driving or in stop-and-go situations.The kinematic vehicle model is not derived from Newton’s laws of motion but from theAckermann steering geometry. Because the kinematic model is derived under the assumptionthat there is no tire slip angle, it is reliable when the velocity vector of each wheel is in thedirection of the wheel. This is the reason why the kinematic model has been used for lowspeed situations such as smart parking assist system with limited tire side-slip. But, athigher speeds, vehicle side-slip can easily be generated, and this phenomenon violates theassumption of no side-slip of tire. Therefore, the kinematic model cannot represent the exactvehicle motion at high speeds.Due to these reasons, prior research has conventionally used a kinematic vehicle model at lowspeeds and a dynamic vehicle model at high speeds. For an autonomous vehicle, two separatecontrollers for low and high speeds should be used and tuned. A comparison between thesetwo models is rarely found [6][37]. In the following section, the representative vehicle modelfor both low and high speeds will be suggested.
3.1.2 Motivation for a New Control Law
To make more efficient and precise control logic, certain issues should be considered:
• Nonlinear System DynamicsThe simplest control law for the lane keeping system is a PID control approach. Byusing a linearized model for nonlinear system dynamics, a simple state feedback controllaw can be adopted. Even when using the Model Predictive Control (MPC) approach,an iterative linearization model is used for the control law.[10][21] However, in orderto keep the nonlinearity of the system dynamics, Sliding Model Control (SMC) can beone of the simplest control laws to choose. Furthermore, MPC logic can easily be setup as a nonlinear control logic.
• Cheap Computational CostMPC approach is very easy to construct while considering constraints and nonlinearsystem dynamics. However, it requires very expensive computational cost. As a result,various computationally efficient methods such as Explicit MPC are suggested [7][56].Compared with MPC approach, the SMC approach has a distinctly low computationalcost.
• Disturbance ConsiderationIn order to include the disturbance term in the controller, the methods based on SMC

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 39
and MPC are suggested. In the Sliding Mode Controller, a Disturbance Observer can beincluded to reject not only the mismatched disturbance but also the other disturbances[39]. In the MPC formulation, the disturbance can be considered as a stochastic term[11] or a band [22] in order to guarantee robustness of the control performance to thedisturbance.
• Constraint SettingIn designing an effective controller, constraints are crucial elements to consider in orderto guarantee the stability and performance for the real system. Using a SMC approach,a state constraint algorithm was suggested [34], but it does not consider the controlinput constraint. Using the MPC approach, state and input constraints can be easilyincluded in the optimal cost problem.
Therefore, in order to make a more efficient and robust controller, nonlinear system dynamics,cheap computational cost and robustness to disturbances should be considered in the controllaw.

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 40
Figure 3.1: Kinematic Model of Lateral Vehicle Motion
3.2 New Lateral Vehicle Dynamics Model
In the beginning of this chapter, some limitations using kinematic and dynamic vehiclemodels for lateral motion were introduced. In this chapter, simulation results will show suchlimitations when the models are used to describe lateral vehicle motion. Then, in order toovercome the limitation, a steady state dynamic vehicle model will be derived. The newvehicle model will be used for the derivation of error dynamics for tracking of the desiredlane path.
3.2.1 Current Vehicle Model of Lateral Vehicle Motion and ItsLimitation
There are two types of vehicle models to describe the vehicle’s lateral motion.
• Kinematic ModelThis model, as shown in Figure 3.1, describes a mathematical description of the
vehicle motion without the tire force effects and tire slip. The model only presents the

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 41
geometric movement of the vehicle. The representative equations are,
x =V cos(ψ + β)
y =V sin(ψ + β)
ψ =V
lrsin(β)
β = tan−1(lr
lf + lrtan(δf )),
(3.1)
where δf is front tire’s steering angle. x, y, ψ and β are longitudinal velocity, lateralvelocity, yaw rate and vehicle side slip angle, respectively. This motion is generatedby front steering, and we assume that the front tire moves perfectly along the steeringangle without tire side-slip. Therefore, this model has two main problems. At higherspeeds over 40 km/h, the tire slip increases and the model does not represent thevehicle’s lateral motion accurately. Also, under the road bank angle, there exists alateral gravitational force on the vehicle. Since the model does not consider lateralforces, the bank angle effect cannot be included in the model.
• Dynamic ModelThe dynamic model, as shown in Figure 2.6, describes the tire forces resulting from tireside-slip due to difference between the vehicular direction and the tire direction. Thelateral tire force can be described with the equations (2.20) and (2.21) in the previouschapter. This linear tire model is widely used although there are many other nonlinearor empirical tire models, such as Magic Formula and Dugoff model. The lateral vehiclemotion can be derived for vehicle side-slip angle and yaw rate.
β =− ψ +2Cf
α
mVx
{δf − β −
lf ψ
Vx
}+
2Crα
mVx
{−β − lrψ
Vx
}
Iz · ψ =lf × 2Cfα
{δf − β −
lf ψ
Vx
}− lr × 2Cr
α
{−β − lrψ
Vx
},
(3.2)
where β, ψ and Iz are vehicle side-slip, yaw rate and moment of inertia along thez-axis, respectively. This model has good accuracy at high vehicle speeds, but due tothe denominator term, Vx, in the equations, the model exhibits a singularity at lowspeeds.
• Validation Results for the kinematic and dynamic modelsIn order to validate the vehicle models, Carsim, a vehicle dynamics software, is used forsimulation. Figures 3.2 to 3.4 show simulation results under fast and slow steering ma-neuvers using both kinematic and dynamics vehicle models. The left and right graphsshow the results for kinematic and dynamic vehicle models, respectively. As shown

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 42
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Kinematic
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2
Sid
e S
lip[d
eg]
Time[s]
Steering Wheel Angle
ReferenceCalculated
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Dynamic
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2S
ide
Slip
[deg
]
Time[s]
Figure 3.2: Vehicle Model Limitation - 20km/h
in Figure 3.2, at low speeds, the kinematic model shows good simulation performancecompared to the Carsim results. On the other hand, using the dynamic model, therearises a chattering problem as described at the beginning of this chapter. As velocityincreases, the dynamics vehicle model displays better performance than the kinematicmodel, as shown in the Figure 3.3. In Figure 3.4, the kinematic model’s yaw rate andvehicle side-slip have very different values than those of the Carsim results. From theseresults, we can conclude that we cannot use any one of these vehicle model alone tocover the entire velocity range of a vehicle.
3.2.2 Steady State Dynamic Model
As mentioned in the previous section, we need to overcome two problems. First, the modelshould be applicable over all ranges of speed. Secondly, bank angle effect should be includedin the dynamics. Starting from the dynamic vehicle model, bank angle effect is included inthe last term, −g sinφr
Vx, in equation(3.3). However, the bank angle does not have an effect on
yaw rate equation as shown in equation (3.4).
β = −ψ +2Cf
α
mVx
{δf − β −
lf ψ
Vx
}+
2Crα
mVx
{−β − lrψ
Vx
}− g sinφr
Vx(3.3)

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 43
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Kinematic
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2
Sid
e S
lip[d
eg]
Time[s]
Steering Wheel Angle
ReferenceCalculated
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Dynamic
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2S
ide
Slip
[deg
]
Time[s]
Figure 3.3: Vehicle Model Limitation - 60km/h
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Kinematic
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2
Sid
e S
lip[d
eg]
Time[s]
Steering Wheel Angle
ReferenceCalculated
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Dynamic
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2
Sid
e S
lip[d
eg]
Time[s]
Figure 3.4: Vehicle Model Limitation - 120km/h

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 44
Iz · ψ = lf × F fy − lr × F r
y
= lf × 2Cfα
{δf − β −
lf ψ
Vx
}− lr × 2Cr
α
{−β − lrψ
Vx
}(3.4)
With the following steady-state assumptions:
β = 0
ψ = 0,
equations (3.5) and (3.6) can be set up.{mV x+
2Cfαlf − 2Cr
αlrVx
}ψss +2(Cf
α + Crα)βss = 2Cf
α × δf −mg sinφr (3.5){Cfαl
2f + Cr
αl2r
Vx
}ψss +(lfC
fα − lrCr
α)βss = lfCfα × δf (3.6)
From the equations, we derive the following solutions which can be called steady statedynamic motion.
ψss =2Cf
αlf (Cfα + Cr
α)× Vx × δfmV 2
x (lrCrα − lfC
fα) + 2Cf
αCrα(lf + lr)2
− 2Cfα(lfC
fα − lrCr
α)× Vx × δfmV 2
x (lrCrα − lfC
fα) + 2Cf
αCrα(lf + lr)2
(3.7)
+Vx × (lfCf
α − lrCrα)mg sinφr
mV 2x (lrCr
α − lfCfα) + 2Cf
αCrα(lf + lr)2
βss =2Cf
α(l2fCfα + l2rC
rα)× δf
mV 2x (lrCr
α − lfCfα) + 2Cf
αCrα(lf + lr)2
− Cfαlf (mV
2x + 2lfC
fα − 2lrC
rα)× δf
mV 2x (lrCr
α − lfCfα) + 2Cf
αCrα(lf + lr)2
(3.8)
− (lf 2Cfα + l2rC
rα)mg sinφr
mV 2x (lrCr
α − lfCfα) + 2Cf
αCrα(lf + lr)2
In the dynamic vehicle model, geometric differences between front and rear suspension sys-tems can be shown as tire coefficients, Cf
α and Crα. These parameters have an effect on
understeer or oversteer characteristics. Therefore, if we neglect these characteristics, neutralsteer can be assumed with the following equation,
lfCfα = lrC
rα. (3.9)
Under this assumption, the steady-state dynamic equation can show the kinematic model’sequations. First, using the assumption, the first term of the yaw rate equation, (3.7) can be

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 45
written as:
ψss ∼=VxL× δf (3.10)
The equation (3.9) perfectly matches the term of the kinematic model as shown in equa-tion(3.10).
ψkinematic =VxL× δf (3.11)
Next, if we look at the side-slip equation, (3.8), the first term becomes
βss ∼=lrL× δf (3.12)
Thus, the equation (3.11) is shown to be the same as the kinematic model’s side-slip inequation (3.12),
βkinematic =lrL× δf . (3.13)
Therefore, we can conclude that the steady-state dynamics equations show the kinematicmodel’s motion under the assumption of neutral steer. Even though the assumption cannotbe held at low speeds, the tire side-slip is small at low speeds. The small tire side-slip makesthe neutral steer assumption feasible. As a result, the steady state dynamic model acts as akinematic model at low speeds.However, there are still two additional terms in the right side of the slip angle equation,(3.8). The second term shows the body side-slip due to tire slip:
m
2(Cfα + Cr
α)
V 2x
L× δf . (3.14)
The steady-state model can be treated as a dynamic model in the presence of tire side-slip.In other words, the model can be treated as a dynamic model at high speeds.Also, the last term in equation (3.7) and (3.8) result from bank angle. Therefore, the steady-state dynamics model includes bank angle effect on the motion.Consequently, the suggested steady-state model can be used over all vehicle speed rangesconsidering the bank angle effect. However, in the real system, vehicle response such as yawrate and vehicle side-slip cannot be generated directly from steering manipulation. We needto consider a delay term from tire response to vehicle inertial response. So, in the lateraldynamics, a first order lag has been normally considered as follows.[14][32]
ψ = ψss − τv × ψ (3.15)
β = βss − τv × β (3.16)

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 46
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Kinematic
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2
Sid
e S
lip[d
eg]
Time[s]
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Dynamic-SS
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2
Sid
e S
lip[d
eg]
Time[s]
Steering Wheel Angle
ReferenceCalculated
Figure 3.5: New Vehicle Model Validation - 20km/h
3.2.3 Simulation and Vehicle Test for Steady State DynamicModel Validation
From Figures 3.2 to 3.4, issues with using kinematic and dynamic models were found. Asshown in Figure 3.5, at low speeds, the steady state dynamics model (right graph) perfectlymatches the kinematic model (left graph). Also, the results are the same with the Carsimresults(highlighted in blue dotted line as a reference). Even at higher speeds (60km/h,120km/h), as shown in Figure 3.6 and 3.7, the results are similar to the dynamics model’sresults. Lateral motions such as yaw rate and vehicle side-slip are very similar with Carsimsimulation results.
For real vehicle validation tests, the Hyundai AZERA is used on the Hyundai CaliforniaProving Ground (CPG). Figure 3.8 shows the results. The vehicle is driven at 60km/h andthen the driver made several double lane changes with the steering input as shown on thetop graph. Real motion was measured by a GPS/INS equipment (RT2002) as a reference.The calculated graph represents the steady-state dynamic vehicle model including first orderlag. As shown in the graph, the lateral motion using the proposed model perfectly matchesthe real vehicle motion. Based on the results, we conclude that the proposed steady-statedynamic vehicle model can be used for all ranges of speed.

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 47
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Dynamic-SS
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2
Sid
e S
lip[d
eg]
Time[s]
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Dynamic
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2S
ide
Slip
[deg
]
Time[s]
Figure 3.6: New Vehicle Model Validation - 60km/h
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Dynamic-SS
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2
Sid
e S
lip[d
eg]
Time[s]
0 5 10 15 20-20
0
20
40
60
Ang
le[d
eg]
Time[s]
Dynamic
0 5 10 15 20-10
0
10
20
30
40
Yaw
Rat
e[de
g/s]
Time[s]
0 5 10 15 20-2
-1
0
1
2
Sid
e S
lip[d
eg]
Time[s]
Figure 3.7: New Vehicle Model Validation - 120km/h

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 48
125 130 135 140 145 150 155-150
-100
-50
0
50
100
150
Ang
le[d
eg]
Time[s]
125 130 135 140 145 150 155-30
-20
-10
0
10
20
30
Yaw
Rat
e[de
g/s]
Time[s]
125 130 135 140 145 150 155-3
-2
-1
0
1
2
3
Sid
e S
lip[d
eg]
Time[s]
Steering Wheel Angle
MeasuredCalculated
MeasuredCalculated
Figure 3.8: New Vehicle Model Validation Test - 60km/h

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 49
Figure 3.9: Error Dynamics of Path Following or Lane Keeping
3.2.4 Error Dynamics
To construct system dynamics for lane keeping or path following purposes, error dynamicswith respect to the desired (reference) trajectory should be considered, as shown in Figure3.9. From the geometric relationship between the trajectory and vehicle motion, the followingequations can be derived for the lateral offset error, ey, and heading error, eψ:
ey = Vy + Vx tan eψ
= Vx tan β + Vx tan eψ (3.17)
≈ Vx(β + eψ)
eψ = ψ − VxR
(3.18)
Using the steady-state vehicle dynamics equation, yaw rate(ψ), and side-slip angle(β), wedefine error dynamics. Also, the path radius, R, directly affects the heading angle erroras shown in equation (3.14). Thereafter, the heading error affects offset error in equation(3.13).

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 50
3.3 Lane Keeping Controller
In this section, a new control law is presented. Then, using a steady-state lateral dynamicsequation and error dynamics, which are suggested in the previous section, a discretizedsystem dynamics model is derived. Using a Receding Horizon Sliding Control approach, adetailed control logic for a lane keeping controller is introduced.
3.3.1 Control Law Design
As mentioned in section 3.1.2, sliding control and model predictive control have advantagesand disadvantages. In order to satisfy criteria such as low computational cost, considera-tion of nonlinear dynamics, robustness to disturbances, and consideration of constraints, acombination logic between the sliding control and model predictive control was suggested[36]. Also, A. Hansen and K. Hedrick [27] used a discrete difference operator to adopt theReceding Horizon Sliding Control (RHSC) algorithm on a discrete time case. In this logic,the reaching phase and the sliding phase can be easily included to minimize a predefinedcost when considering system states over a receding horizon. This research is mainly basedon this approach [27].First, we take a discrete-time nonlinear system, as shown in the following equations, with nstates.
x(k + 1) = fd(x(k), u(k), k), (3.19)
y(k) = h(x(k)), (3.20)
where x ∈ Rn and u, y ∈ R are state vector, input and output of the system, respectively.Also, the discretized system dynamics, fd, is derived from the continuous time system dy-namics. h is defined as a measurement function of the system.
If D( · ) is a kind of stable difference operator, D( · ) ≡ 0 should be a stable differenceequation. Therefore, a discrete-time case sliding variable can be defined as following:
sk = D(εk), (3.21)
where εk = yk−ydesk is defined as the tracking error between the current output and the desiredoutput. In order to illustrate the role of D, it can be defined as D(εk) = ρεk− εk+1, ρ ∈ [0, 1].Therefore, D(εk) ≡ 0 is a stable difference equation of order d = 1, and the definitionguarantees convergence of εk to zero.Also, in the error dynamics with the difference operator, sk+1 should be defined with ukthrough the system dynamics. A necessary and sufficient condition for a discrete time slidingvariable to converge to zero is
|sk+1| < |sk| . (3.22)
In order to construct the error dynamics over N -step prediction horizon, the variable S canbe defined as follows.
Sk+1 =[sk+1 sk+2 . . . sk+N
]T(3.23)

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 51
Similarly, the system dynamics including the state and input over the receding horizon areformulated as follows.
Xk =[xk xk+1 . . . xk+N+1
]T, (3.24)
Uk =[uk uk+1 . . . uk+N
]T, (3.25)
where N = N + d − 1. The control input sequence, Uk, is derived from an optimizationproblem as shown in the equation (3.22),
minUk
Jk(Sk+1)
s. t. si+1 = ρεi+1 − εi+2, i = k, . . . , k +N − 1
εi+1 = h(xi+1)− ydesi+1, i = k, . . . , k + N (3.26)
xi+1 = fd(xi, ui, i), i = k, . . . , k + N
xi+1 ∈ X , ui ∈ U , i = k, . . . , k + N
xk = x(k)
where X is a feasible or a constrained state set, and U is a constrained control input set. Ateach time step, current state is measured and is used to initialize the optimization problemas x0 = x(k). Then, the optimization problem (3.26) is solved at every time step, and thefirst control input is applied to the plant. This process can be shifted at the next time step.Therefore, it is treated as receding horizon sliding control.
3.3.2 Lane Keeping Controller
3.3.2.1 Controller Setup
For the lane keeping controller, the states can be defined as follows.
[x1, x2, x3, x4, x5]T = [ey, eψ, β, ψ, δf ]T (3.27)
From equations (3.7),(3.8),(3.17) and (3.18), the discretized system dynamics can be derivedas shown in equations (3.28) through (3.32). As shown in states x3 and x4, the first orderlag term, τv, from actual steering input to the vehicle motion was considered. Also, in orderto control the steering angle, the steering torque interface between the controller and thesteering system was used. Once the desired steering angle is calculated from RHSC logic,a desired steering torque is generated and transmitted to the steering system over CAN(controller area network) in order to track the value. This interface and actuator control,however, also have delayed, as shown in Figure 3.10. Therefore, the steering actuator delayterm, τs, can be described as first order lag, and it is included in the state x5 of systemdynamics. τv and τs are 0.06 and 0.85, respectively.

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 52
160 165 170 175 180 185 190 195 200-8
-7
-6
-5
-4
-3
-2
-1
0
Ang
le[d
eg]
Time[s]
Steering Angle : CommandSteering Angle : ActualSteering Angle : Steering Controller 1st Order Model
Steering Controller 1st Order Model : Tau = 0.9
Figure 3.10: Steering Actuator Delay
x1(k + 1) = x1(k) + Ts × Vx × {x2(k) + x3(k)} (3.28)
x2(k + 1) = x2(k) + Ts ×{x4(k)− Vx
R
}(3.29)
x3(k + 1) = x3(k) +Tsτv× {βss(k)− x3(k)} (3.30)
x4(k + 1) = x4(k) +Tsτv× {ψss(k)− x4(k)} (3.31)
x5(k + 1) = x5(k) +Tsτs× {u(k)− x5(k)} (3.32)
A control error, e(k), can be constructed with lateral offset, ey, heading error, eψ, andoffset error integral,
∑ey. This control error term has weighting factors, η1 and η2, for each
control error(offset error and heading error). The next time step’s error, e(k + 1), is definedin terms of ey(k + 1) and eψ(k + 1) from system dynamics. Finally, the sliding manifold,s(k) is formulated with current control error, e(k), and the next control error, e(k + 1),with weighting factor ρ ∈ [0, 1]. Note that the error summation term,
∑ey, is added to
the total tracking error calculation. Without this term, a small steady-state offset error wasfound during vehicle tests. As a results, the integral offset error is added to the control error

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 53
calculation term with a constrained value.
e(k) = ey(k) + η1 × eψ(k) + η2 ×∑
ey(k) (3.33)
e(k + 1) = ey(k + 1) + η1 × eψ(k + 1) + η2 ×∑
ey(k + 1) (3.34)
s(k) = ρ× e(k)− e(k + 1) (3.35)
Then, the optimization problem can be formulated as follows:
minUk
Jk(Sk+1) = minUk
N∑k=0
{s2k + w1 × (ψk − ψdes,k)2 + w2 × ψ2
k} (3.36)
s.t. xi+1 = fd(xi, ui, i), i = k, · · · , k +N (3.37)
xi+1 ∈ X , i = k, · · · , k +N (3.38)
xk = x(k) (3.39)
ui ∈ U , i = k, · · · , k +N (3.40)
Uk = [uk, uk+1, · · · , , uk+N ]T (3.41)
Sk+1 = [sk+1, sk+2, · · · , , sk+N+1]T (3.42)
In the cost function(equation (3.31)), the tracking error is an essential term. In order to fol-low a desired path, the yaw rate difference between the current yaw rate and the desired yawrate, which is calculated by ψdes = Vx/R, is considered. This term acts like a feed-forwardterm to track the desired path, and the sk term acts as a feed-back term to compensatefor the path tracking error. Also, in order to guarantee a smooth steering action, mini-mum steering manipulation should be considered, including minimum yaw rate generation,as shown in the last term.This optimization problem is governed by system dynamics fd(xi, ui, i), and state constraintsare considered. For example, the vehicle must stay in the lane, and that means ey needs tobe constrained. For the input constraint(U), the maximum steering input and its rate wereconstrained for smooth driving condition.From the point of tuning parameters, compared to a normal MPC formulation, RHSC ap-proach may have less tuning parameters, since only one sliding surface needs to be formulatedin the optimization problem instead of considering all states.In the receding horizon formulation, at every time step, future states should be defined withsystem dynamics over the prediction horizon. In equation (3.29), future road radius, which ismeasured by a front looking camera, is considered. Also, in equations (3.30) and (3.31), fu-ture yaw rate and side-slip angle can be calculated from the steering angle input as shown inequations (3.7) and (3.8). However, in equations (3.7) and (3.8), we need information aboutthe road bank angle over a prediction horizon. Although we are estimating the current roadcurvature, we still need to consider the future road bank angle. Fortunately, there exists abank angle design guide (Highway Design Manual, Table 202.2, page. 200-10) that definesthe proper road curvature and road type, from the California Department of Transportation

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 54
[1]. With this guide, the future road bank angle can be calculated from a weighted(ξi) com-bination of the estimated current road bank angle and the road bank angle, suggested bythe Highway Design Manual, as shown in the following equation:
φr,i = ξi × φest,i + (1− ξi)× φmanual,i, i = k, · · · , k +N (3.43)
3.3.2.2 Stability of the Controller
As a robust lane keeping controller, the RHSC approach should guarantee stability. Theprocedure of proving the stability of the controller follows a similar procedure used for MPCas analyzed by Francesco Borrelli.[24] First, it requires certain assumptions as follows.
• Assumption 1: The initial state is feasible.
• Assumption 2: There is no model mismatch.
• Assumption 3: The sliding manifold, s, is control invariant. At a certain time step k,the controlled system goes to the sliding manifold, s = 0, with control input, u∗k, thatmakes the system stay on the manifold. In addition to that, the next step’s systemcan be feasible.
With these assumptions, if we add a terminal constraint, sk+N = 0, then the RHSC approachis persistently feasible and asymptotically stable. To prove the feasibility and stability, first,persistent feasibility should be guaranteed. From Assumption 2, the initial state x0 is feasible,and then the feasible control sequence, U0, can be determined. This optimal solution wascalculated from the optimization problem with the terminal constraint, sN = 0. At the nexttime step, the feasible optimal control sequence is updated with U1. This solution is alsofeasible, and makes sN+1 = 0. So, with Assumption 3, all control sequences can be foundover the time steps and they make the system feasible. Therefore, we conclude that thefeedback system is persistently feasible.In order to prove the stability of the RHSC approach, the Lyapunov stability theorem isused. For penalizing the cost,Wk+1 = diag(wk+1, . . . , wk+N) can be used. For a more simplecase, Wk+1 = I is easy to prove the stability. The Lyapunov function is:
Vk = STk Sk. (3.44)
One step later,
Vk+1 = STk+1Sk+1 ≤ STk Sk − s2k + s2
k+N
= STk Sk − s2k ≤ Vk.
(3.45)
Since Vk is a decreasing function or it is equal to zero over the feedback control sequence,we conclude that the feedback system with the controller is asymptotically stable.

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 55
0 2 4 6 8 10 12-1
0
1
Time[s]
Erro
r
0 2 4 6 8 10 12-20
-10
0
10
Time[s]
Ste
erin
g[de
g]
Offset Error[m]Heading Error[deg]
CommandActual
Figure 3.11: Simulation Results - Lane Keeping Control with Initial Offset Error
3.4 Simulation Results
Basic simulation tests have been conducted to verify the control logic before implementationon a real vehicle. Carsim and Matlab were used for this purpose. The sampling time is0.1s, but in the prediction horizon, a different sampling time of 0.2s is used to predict longerfuture motion. The prediction horizon is 12 steps (2.4s). For the MPC solver, NPSOL [51], a widely used tool for general nonlinear optimization problems, is used.
3.4.1 Basic Control Performance
For the first simple test scenario, there is an initial lateral offset error with no heading errorat the beginning. Also, desired path is a straight line. As shown in Figure 3.11, within 5seconds, the vehicle goes to the center line (no offset error) with steering angle input. Onthe bottom graph, we can see steering angle delay, and see that the delay was included inthe system dynamics over the prediction horizon. In Figure 3.12, the controlled vehicle’strajectory smoothly goes to the center of the desired path. The open loop trajectory with12 steps is also plotted (highlighted with black dots).On the curved road, Figure 3.13 shows a good path tracking performance under varying roadcurvature, which is plotted in the top graph. The vehicle travels on a straight road, entersa curved road with R=500m, then exits the curved road to the straight lane again. In thesecond graph, we can find that the controller perfectly controls the vehicle to track the lanewith very small offset and heading error even on the transient curvy conditions. Also, as

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 56
0 20 40 60 80 100 120 140 160 180 200-4
-2
0
2
4
X[m]
Y[m
]
Desired TrajectoryClose-loop TrajectoryOpen-loop Trajectory
Figure 3.12: Simulation Results - Closed-loop vs. Open-loop
depicted on the bottom graph, the steering delay is fully considered to generate a moderatesteering control input. In the cost function of equation (3.36), a yaw rate term was includedto minimize yaw motion. Due to this term, in Figure 3.14, we found that the controlledtrajectory (in red) goes to the shortest path to minimize yaw rate generation.
3.4.2 Bank Angle Effect Simulation
Now, we observe th effect of a lack of bank angle information on the controlled system.Figure 3.15 shows the comparison results between the controlled system with and withoutbank angle information. When a vehicle enters a curved road, there exists bank angle, asshown in the second graph. The other graphs show offset error, heading error and steeringcontrol input, respectively. Although there is no significant difference in heading error, if wedo not consider bank angle, we clearly observe that there exists a steady-state error on theoffset error graph. However, this characteristic can be shown differently with different gainscheduling. We will see these different aspects in the following section.

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 57
10 15 20 25 30 35 40-4
-2
0
2x 10-3
Time[s]
Cur
vatu
re[1
/m]
10 15 20 25 30 35 40-1
0
1
Time[s]
Erro
r
10 15 20 25 30 35 40-20
-10
0
10
Time[s]
Ste
erin
g[de
g]
Road Curvature
Offset Error[m]Heading Error[deg]
CommandActual
Figure 3.13: Simulation Results - On the curved road
410 420 430 440 450 460 470-4
-2
0
2
X[m]
Y[m
]
Desired TrajectoryControlled Trajectory
Figure 3.14: Simulation Results - Shortest path On the curved road

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 58
0 5 10 15 20 25-4
-2
0
2x 10-3
Cur
vatu
re[1
/m]
0 5 10 15 20 250
5
10
Ang
le[d
eg]
0 5 10 15 20 25-1
0
1
Erro
r[m]
0 5 10 15 20 25-1
0
1
Erro
r[deg
]
0 5 10 15 20 25-20
0
20
Time[s]
Ste
erin
g[de
g]
Road Curvature
Bank Angle
Offset Error : w/o Bank AngleOffset Error[m] : with Bank Angle
Heading Error : w/o Bank AngleHeading Error : with Bank Angle
U : w/o Bank AngleU : with Bank Angle
Figure 3.15: Simulation Results - Bank Angle Effect

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 59
Figure 3.16: Test Vehicle equipped with a Forward Looking Camera
3.5 Vehicle Test Results
For implementation on a real vehicle, the Hyundai AZERA, equipped with steering anglecontroller, was used. To detect front lane markers, a Mobileye-Mando camera is installed inthe center of the front windshield, as shown in Figure 3.16. Control logic is implemented onthe dSpace Microautobox for real-time implementation. Before testing on public roads, basicvalidation tests were performed at the Hyundai California Proving Ground. Sampling timewas 0.1s, and in receding horizon, a different sampling time of 0.2s and 12 steps predictionhorizon were used. For optimization solver, NPSOL was used.
3.5.1 Vehicle Test on the Public Roads
Afterwards, the control logic was tested on the public roads, I-580 in California (from BayView Exit to Richmond Bridge Exit) as shown in Figure 2.18. Figure 3.17 shows roadgradient estimation results, which were introduced in the previous chapter. The measuredvalues(in blue) is from the RT2002 as a reference and we see that the estimation has goodaccuracy under real-time vehicle control. The road disturbance information can be fed to thelane keeping controller and Figure 3.18 shows these results. The offset error has µ = 0.079m(mean) and σ = 0.237m (standard deviation). If the offset error is less than ±1m, the vehicleis considered to be in the lane. Therefore, as shown in the second graph, we found that thevehicle is controlled to stay in the lane. Also, the heading error has µ = −0.032deg andσ = 0.281deg. The controlled steering wheel angle is within ±8deg, and was observed to becontrolled very smoothly by the control logic.

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 60
■ Vehicle Test
With Bank Angle Information : Bay view Richmond Bridge
Offset Error : 0.079 +/- 0.237Heading Error : -0.032 +/- 0.281
DATA : Data_LKS_SS_Dynamic\Data10
100 150 200 250 300 350-5
0
5
Ang
le[d
eg]
Time[s]
100 150 200 250 300 350-5
0
5
Ang
le[d
eg]
Time[s]
Road Gradient: MeasuredRoad Gradient : Estimated
Bank Angle+Body Roll : Measured)Bank Angle+Body Roll : Estimated
100 150 200 250 300 350-2
0
2x 10-3
Roa
d C
urv[
1/m
]
Time[s]
100 150 200 250 300 350-1
0
1
e y[m]
Time[s]
100 150 200 250 300 350-1
0
1
e psi[d
eg]
Time[s]
100 150 200 250 300 350-10
0
10
Ang
le[d
eg]
Time[s]
Road Curvature
Offset Error
Heading Angle Error
Steering Wheel Angle : CommandSteering Wheel Angle : Actual
Figure 3.17: Road Gradient Estimation in Real Time
3.5.2 Bank angle Effect
As we have seen in the previous simulation section, there exists a steady-state offset errorwithout bank angle information. On the Hyundai CPG, vehicle tests were performed to ver-ify this characteristic. The tests were performed on the curvy track with R=1000m wherethe bank angle is about 6 degrees.Figure 3.19 shows exactly the same results as the simulation results in Figure 3.15. Withoutbank angle estimator, there exists an offset error of about 0.5m. Using a bank angle estima-tor, there is very small offset error less than 0.1m. An effort was attempted to decrease theoffset error without bank angle information by increasing the relative offset gain by assigninga lower value to the heading error gain, η1, in equation (3.33). As a result, as depicted inthe top graphs in Figure 3.20, although steady-state offset error has been removed, we foundlarge oscillations in control input. In the bottom graph, a controller with a bank angle esti-mator was able to decrease the amplitude of the offset error due to additional lateral forceof road bank angle compared to the controller without bank angle estimator by 29%. So, weconclude that if we include bank angle information as a disturbance from the road, controlperformance can be easily improved.As can be seen in Figure 3.21 and 3.22, this characteristic can be easily found even on publicroads. As shown in 3.21, with the bank angle estimator, the vehicle stays in the lane withlimited offset error (µ = 0.142m). On the other hand, without bank angle information, asshown in Figure 3.22, the controlled vehicle stays at the edge of the lane (µ = 0.507m). Inconclusion, between the two controllers with or without bank angle information, the headingerrors are almost the same, but we can see large offset errors without bank angle information.

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 61■ Vehicle Test
With Bank Angle Information : Bay view Richmond Bridge
Offset Error : 0.079 +/- 0.237Heading Error : -0.032 +/- 0.281
DATA : Data_LKS_SS_Dynamic\Data10
100 150 200 250 300 350-5
0
5
Ang
le[d
eg]
Time[s]
100 150 200 250 300 350-5
0
5
Ang
le[d
eg]
Time[s]
Road Gradient: MeasuredRoad Gradient : Estimated
Bank Angle+Body Roll : Measured)Bank Angle+Body Roll : Estimated
100 150 200 250 300 350-2
0
2x 10-3
Roa
d C
urv[
1/m
]
Time[s]
100 150 200 250 300 350-1
0
1
e y[m]
Time[s]
100 150 200 250 300 350-1
0
1
e psi[d
eg]
Time[s]
100 150 200 250 300 350-10
0
10
Ang
le[d
eg]
Time[s]
Road Curvature
Offset Error
Heading Angle Error
Steering Wheel Angle : CommandSteering Wheel Angle : Actual
Figure 3.18: Lane Keeping Control Results on a Public Road

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 62 1
0 5 10 15 20 25 30-1
0
1
e y[m]
Time[s]
0 5 10 15 20 25 30-1
0
1
e psi[d
eg]
Time[s]
40 45 50 55 60 65 70-1
0
1
e y[m]
Time[s]
40 45 50 55 60 65 70-1
0
1
e psi[d
eg]
Time[s]
(a) Without Bank Angle Estimator
(b) With Bank Angle Estimator
Figure 3.19: Bank Angle Effect - Low Offset Error Gain

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 63
2
(a) Without Bank Angle Estimator
(b) With Bank Angle Estimator
60 65 70 75 80 85 90-1
0
1
e y[m]
Time[s]
60 65 70 75 80 85 90-1
0
1
e psi[d
eg]
Time[s]
0 5 10 15 20 25 30-1
0
1
e y[m]
Time[s]
0 5 10 15 20 25 30-1
0
1
e psi[d
eg]
Time[s]
Figure 3.20: Bank Angle Effect - High Offset Error Gain

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 64
155 160 165 170 175 180 185 190 195 200-2
0
2x 10-3
Roa
d C
urv[
1/m
]
Time[s]
155 160 165 170 175 180 185 190 195 200-1
0
1
e y[m]
Time[s]
155 160 165 170 175 180 185 190 195 200-1
0
1
e psi[d
eg]
Time[s]
155 160 165 170 175 180 185 190 195 200-10
0
10
Ang
le[d
eg]
Time[s]
Road Curvature
Distance Error
Heading Angle Error
Steering Angle : CommandSteering Angle : Actual
■ Vehicle Test With Bank Angle Information
Offset Error : 0.142 +/- 0.219Heading Error : -0.074 +/- 0.353
Figure 3.21: Controller with Bank Angle Estimator

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 65
160 165 170 175 180 185 190 195 200 205-2
0
2x 10-3
Roa
d C
urv[
1/m
]
Time[s]
Road Curvature
160 165 170 175 180 185 190 195 200 205-1
0
1
e y[m]
Time[s]
Distance Error
160 165 170 175 180 185 190 195 200 205-1
0
1
e psi[d
eg]
Time[s]
Heading Angle Error
160 165 170 175 180 185 190 195 200 205-10
0
10
Ang
le[d
eg]
Time[s]
Steering Angle : CommandSteering Angle : Actual
■ Vehicle Test
Offset Error : 0.507 +/- 0.313Heading Error : -0.082 +/- 0.293
Without Bank Angle Information
Figure 3.22: Controller without Bank Angle Estimator

CHAPTER 3. LATERAL MOTION CONTROLLER : LANE KEEPINGCONTROLLER ASSOCIATED WITH ROAD DISTURBANCE ESTIMATOR 66
3.6 Conclusion
This chapter proposed a steady-state dynamic model to describe lateral vehicle dynamics overall speed ranges. It was also useful to consider bank angle effect. Through simulation andreal vehicle tests, we found that the model was very reasonable and has good accuracy. Themodel was also used to derive error dynamics of offset error and heading error for lane keepingor path following purposes. From the steady-state dynamic model and error dynamics, a lanekeeping controller using RHSC approach was designed. The control approach was simpleto formulate and easy to add constraints to with the receding horizon technique. Fromsimulation, the controller and dynamic models were verified. Subsequently, real vehicle testswere performed on public roads. Simultaneously, road angle estimation results were fed to thelane keeping controller to compensate for the lateral force disturbance effect. In conclusion,the proposed logic was very good at controlling the vehicle to follow the lane.

67
Chapter 4
Longitudinal Disturbance Estimation: Front Vehicle’s Future Motion
4.1 Introduction
Another example of a driver assistance system is an Adaptive Cruise Control (ACC) system.It tries to maintain the speed set by the driver. If there exists a front vehicle, the systemmaintains a safe distance with the front vehicle automatically. To detect the front vehicle,the system usually uses a forward pointing radar that measures the current relative distanceand velocity between the controlled ego vehicle and the front vehicle. Therefore, dependingon the current state of the vehicles, the ACC algorithm controls the ego vehicle with thedesired acceleration control input. Therefore, the front vehicle’s future motion is one ofthe key disturbance terms in the controller. In this chapter, a new approach of predictingfuture motion of the front vehicle is presented. The approach consists of three steps: basecar following model, driver aggressivity factor estimation, and future motion calculation.Finally, the advantages of future motion prediction will be mentioned.
4.1.1 Motivation
If we can predict the front vehicle’s future motion, we may have two potential advantages.The first advantage is the improvement of the vehicle’s collision avoidance capability. Beforethe front vehicle starts to decelerate, if the front vehicle’s deceleration is predicted, the egovehicle can decelerate in advance with smaller braking effort. This situation is shown inFigure 4.1. The results are obtained from basic control simulation. With the prediction ofthe front vehicle’s braking, the ego vehicle starts to apply braking at 3.2 seconds (in redline) with smooth braking, even though the front vehicle actually starts to decelerate at 4seconds (in blue line).Energy or fuel saving is another potential advantage. As shown in Figure 4.2, when thefront vehicle decelerates and then accelerates, if the ego vehicle predicts the movement,the ego vehicle does not have to maintain the same movement to follow the front vehicle.

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 68
0 2 4 6 8 10 12−4
−3
−2
−1
0
1
2
Acc
el[m
/s2 ]
Time[s]
Ego Vehicle AccelerationFront Vehicle Acceleration
Figure 4.1: Advantage of the Front Vehicle’s Future Motion Prediction - Early Braking
0 2 4 6 8 10 1240
50
60
70
80
90
100
Vel
ocity
[kph
]
Time[s]
Ego VehicleFront Vehicle
Figure 4.2: Advantage of the Front Vehicle’s Future Motion Prediction - Smooth VelocityProfile
Consequently, the ego vehicle can achieve a smooth velocity profile as shown in Figure 4.2,resulting in a fuel savings improvement.
4.1.2 Method for Prediction of the Front Vehicle’s Motion
Since driving is a complex human-machine interaction, predicting the front vehicle’s futurevelocity or acceleration proves to be a challenging research topic. The decisions made by a

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 69
human driver are not only affected by traffic conditions but also the driver’s unique drivingstyle as well. To simplify the problem, this research focuses on the ego lane vehicle’s longitu-dinal control motion without consideration of the adjacent lane’s traffic. Under this limitedcase, the front driver will react only depending on the movement of the leading vehicle (thefront of the front vehicle). This reaction can be described by a car-following model with arepresentative equation. Therefore, a new method for predicting the front vehicle’s motionis suggested as follows.
• Step 1 : Car-Following ModelThis model describes a certain driver’s distance control and velocity control reactiondepending on the current relative distance and velocity to the front moving vehicle. Itcan be defined with a deterministic equation or a stochastic expression. So, first, weneed to select a good car-following model to describe the front vehicle’s reaction. But,every driver has a different driving style. To predict the motion accurately, we alsoneed to estimate the current front vehicle driver’s driving style in real-time.
• Step 2 : Driver Aggressivity EstimationDriving style can be described with several features. Desired relative distance to thefront vehicle is one of the features. Furthermore, reaction to distance error, which isdefined as the difference between actual distance and desired distance, and reactionto relative velocity are key features of driving style. This reaction can be definedas a driver aggressivity factor. Therefore, we need to extract the aggressivity factorfrom the car-following model in real-time. Once a car-following model is fixed, someparameters for the car-following model can be determined in real-time.
• Step 3 : Front Vehicle’s Future Motion EstimationWe have a base car-following model and a driver aggressivity estimator extractingcurrent front driver’s driving style in real-time. If we then assume the leading vehiclemoves with constant acceleration, we can propagate the front vehicle’s future velocityas we assume that the front driver tries to keep desired distance and zero relativevelocity.
These procedures are presented with detail in this chapter.

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 70
4.2 Step 1 : Base Car-Following Model
In this section, various approaches and ideas for car-following models are introduced.
4.2.1 Literature Review
Over the past several years, many simplified car-following models have been proposed asdeterministic approaches. The goal of the models is to keep safe distance and to convergethe relative velocity to zero. Sometimes, these methods are treated as a kind of controller oradaptive filter [46] to follow the goal. In this approach, all parameters for each model havebeen extracted from real car-following data sets, and a representative equation was chosen.Recently, non-parametric approaches have been suggested for the car-following model. Themethod does not have any fixed equation at the beginning. However, using several sets ofreal data, called training data sets, probability parameters can be defined. In addition tothe non-parametric model, combining probability models under various situations using ahybrid dynamical model was also suggested [19]. This is meaningful because the driver’sbehavior is affected by various traffic situations.First, some parametric approaches are introduced as follows (Original notations used in thereferences were preserved):
• Constant Acceleration Assumption ModelThis is a very simple equation to describe the vehicle following behavior. It assumesthat the following vehicle will keep the same acceleration. Due to its simplicity, thisequation is widely used.
a(t+ Ts) = a(t) (4.1)
where Ts is a sampling time.
• Constant Speed Assumption ModelThe other simple model assumes that the following vehicle will keep constant speed.
v(t+ Ts) = v(t) (4.2)
• Helly Model [28]A liner traffic flow model is suggested by Helly in 1950’s. It was used for watching amacroscopic traffic flow. The model’s equations are as follows.
a(t+ Ts) = C1∆v(t) + C2(∆xn(t)−Dn(t+ Ts)) (4.3)
Dn(t+ Ts) = α + βvn(t) + γan(t) (4.4)
where x(t), v(t) and a(t) are the position, speed and acceleration of the vehicle, respec-tively. Also, ∆x and ∆v are relative distance and relative speed between the two carsat time t. Dn is desired distance of the driver.

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 71
• GM-type Model [8]In addition to the Helly Model, a nonlinear equation model was suggested by GeneralMotors in the 1950’s.
a(t+ Ts) = αvn(t+ Ts)
l
∆xn(t)m∆vn(t) (4.5)
where all variable definitions are the same as that of the Helly Model. Additionally,this model considered a delay term depending on the relative distance.
• Sultan Model [5]Other research has modified the GM-type model to add reality [3]. For example, Sultanextends the GM-type model using an acceleration term for the front and the followingvehicles.
a(t+ Ts) = αvn(t+ Ts)
l
∆xn(t)m∆vn(t) + β1an−1(t) + β2an(t) (4.6)
• Intelligent Driver Model [45]Treiber suggested a more intelligent model starting from the desired distance calcula-tion. From the desired distance, desired acceleration of the following vehicle can becalculated in the model.
ddes = dm + τh · v(t) + v(t)·vrel(t)2√amx·bcmf
(4.7)
a(t+ Ts) = amx
[1− ( v(t)
vmx)4 − (ddes
d(t))2]
(4.8)
In equation(4.7), dm is the minimum relative distance that a driver wants to keepunder any condition even including stop, and τh is the desired time headway. Also,amx and bcmf are maximum acceleration and comfortably allowed deceleration of thedriver, respectively. Using this equation, a desired acceleration of the vehicle can becalculated with the equation (4.8).
For the non-parametric method, an Artificial Neural Network approach was suggested [54].Also, the combination of the Gaussian Mixture Regression and the Hidden Markov Modelis an alternative method for stochastic representation of motion.A number of research results show a comparison of the performances of the car-followingmodels. Some research focus on parametric benchmarking [26][52][53]. The results normallystate that it is important to determine not only a basic equation but to also conduct parame-ter tuning. For the non-parametric model comparison, Angkititrakul compared the Gaussianmixture model (GMM) and the piecewise auto regressive exogenous (PWARX) algorithms[50]. However, both approaches are very dependent on the situation, and show inaccurateprediction under heavy traffic conditions.Recently, Stephanie compared the performance of using both parametric and non-parametric

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 72
approaches to predict the following vehicle’s future movement [63]. The results showed thatparametric models’ performances are better than those of non-parametric models for short-term prediction within 3 seconds. However, for long-term prediction, non-parametric modelsand advanced parametric models are quite better than simple parametric approaches.
4.2.2 New Car Following Model
Long term prediction (more than 3 seconds) has uncertainty and if the predicted informationis included in a vehicle distance controller, the driver can encounter a dangerous situationunder poor prediction. Therefore, we focus on short term prediction to avoid an increase ofuncertainty. Secondly, a car-following model needs to be applied to various scenarios. But,non-parametric approaches, which is based on a certain scenario, have more uncertainty thanparametric approaches. From these view points, short term prediction and consideration ofvarious scenarios, a parametric approach is more reasonable than a non-parametric approachin predicting the following vehicle’s short term movement with more robustness to drivingconditions. Although there are many advanced parametric models, Stephanie [63] concludedthat the Constant Acceleration Model has the best prediction performance for the next 3seconds.Parametric models proposed in the previous section are missing certain behaviors of a driver.First, the driver has faster reaction if the real distance is smaller than the desired distance.Second, the driver reacts differently depending on the sign of relative velocity. Third, thedriver adopts the front vehicle’s acceleration and deceleration to get faster response on con-trols. Therefore, we need a more accurate parametric model under various driving conditionsto consider these characteristics.In addition to the car-following model, we need to extract the current front driver’s drivingtendency in order to predict the front vehicle’s motion more accurately, since all vehicledrivers have different driving styles. For this purpose, a base car-following model should bea suitable equation to include driving style. Furthermore, it should include some parametersto represent the drivers’ driving style.Consequently, a simple deterministic car-following model including the driver’s driving stylecan be defined. The new car-following model represents both the steady state and thetransient car following motions to apply to any driving conditions. A general procedure toderive a car following model is as follows. We acquire the overall driver’s real car-followingdata and then, make one representative equation describing the car-following motion. AnAdaptive Cruise Control (ACC) is a very popular driver assistance system. It is very well-tuned to provide a safe and smoothing distance control performance. Therefore, a basecar-following model can be derived by extracting representative equation from a well-tunedACC controller. Although this is not a nominal equation, it is verified that the equation isone candidate for a car-following model, and it can be adopted to predict the front vehicle’sfuture motion through this thesis.To explain a car-following model, two vehicle’s motions were considered, as shown in Figure

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 73
Step A : Fixed Acceleration Assumption
Step B : Aggressivity Factor Extraction
Step C : Desired Acceleration Calculation
Step D : Add Reality
[Leading Vehicle][Ego Vehicle]
[Front Vehicle]
Figure 4.3: Definition of Control Variable for the Ego Vehicle
0 20 40 60 80 100 120 140 160 180 2000
0.1
0.2
0.3
0.4
k d
Vehicle Speed [kph]
Distance Gain Scheduling vs. Vehicle Speed
0 20 40 60 80 100 120 140 160 180 200
0.29
0.3
0.31
0.32
k v
Vehicle Speed [kph]
Speed Gain Scheduling vs. Vehicle Speed
Figure 4.4: Gain Scheduling of an ACC controller depending on Vehicle Speed
4.3. Equations (4.9) to (4.14) are main equations describing the ego vehicle’s motion tofollow the front vehicle.
ades = kd· de + kv· vrel + ka· af (4.9)
de = drel − ddes (4.10)
vrel = vf − ve (4.11)
ddes = d0 + τh· ve (4.12)
The car-following model calculates the desired acceleration, ades of the following vehicle,where kd, kv, ka are distance gain, velocity gain and acceleration gain, respectively. Also,

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 74
drel is a current clearance distance between two vehicles, and ddes is a desired distance witha time headway, τh set by the driver. v and a are velocity and acceleration. Subscript e andf symbolize the following ego vehicle and the leading front vehicle.All gains(distance, velocity, acceleration) consist of sub-gains and have tuning tables de-pending on the ego vehicle and the front vehicle’s conditions in the ACC algorithm of thecommercial vehicle. However, in this thesis, simple gain scheduling graphs can be written inmathematical equations such as arc tangent functions that were derived, as defined in equa-tions (4.13) and (4.14). Figure 4.4 shows the gain scheduling feature which depends on theego vehicle’s current speed. However, the acceleration gain can be assumed to be a constantvalue because it is not a dominant parameter for the controller. Also, each gain has negativeweighting factors (kd,negativewtng, kv,negativewtng) to include urgent deceleration when distanceerror or relative velocity is of negative value. Due to this gain scheduling, the car-followingmodel has nonlinearity characteristics as follows:
kd = f(ve, de, vrel) (4.13)
= kd,negativewtng· (αd1· arctan(βd1· (ve − βd2)) + αd2· arctan(βd3· ve + kd0))
kv = f(ve, de, vrel) (4.14)
= kv,negativewtng· (αv1· arctan(βv1· (ve − βv2)) + kv0))
where, ve, de and vrel are ego vehicle’s velocity, relative distance to the front vehicle andrelative velocity, respectively. All other parameters such as α, β, kd0, kv0 are fixed parametersfor gain scheduling of kd and kv

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 75
Step A : Fixed Acceleration Assumption
Step B : Aggressivity Factor Extraction
Step C : Desired Acceleration Calculation
Step D : Add Reality
[Leading Vehicle][Ego Vehicle]
[Front Vehicle]
Figure 4.5: Definition of Control Variable for the Front Vehicle
4.3 Step 2 : Aggressivity Factor Estimation
In the previous section, a new car-following model was derived. In this section, the model isapplied on the front vehicle, as shown in the Figure 4.5. A logic to predict the front vehicle’smotion is derived. All equations for the car-following model, from equations (4.9) to (4.14)should be changed for the front vehicle’s motion as represented with equations (4.15) to(4.20) with new notations. (f and ff are representing the front vehicle and the front of thefront vehicle, respectively) These equations show the fundamental car-following motion ofthe front vehicle depending on the motion of the vehicle in front of it.
ades,f = kd· de + kv· vrel + ka· aff (4.15)
de = drel,f − ddes,f (4.16)
vrel,f = vff − vf (4.17)
ddes,f = d0 + τh· vf (4.18)
kd = f(vf , de, vrel,f ) (4.19)
= kd,negativewtng· (αd1· arctan(βd1· (vf − βd2)) + αd2· arctan(βd3· vf + kd0))
kv = f(v, de, vrel) (4.20)
= kv,negativewtng· (αv1· arctan(βv1· (vf − βv2)) + kv0))
Whenever the ego vehicle encounters a new front vehicle, we have to predict the new vehicle’sbehavior because each driver has his own different driving style. In equations (4.15) to (4.20),all control gains should be estimated in real-time to exactly predict the front vehicle’s futuremotion. However, with limited measurement, scenario, and time, we cannot extract allcontrol gains in real-time with very exact values. Fortunately, dominant factors describingeach car driver’s driving style in the equation (4.15) are kd and kv. (Although time headway,τh in equation (4.18) is another driver-dependent factor, it is considered as a fixed valuebecause the desired acceleration due to different time headway error is very small.) Sincethe two gains are nonlinear functions, as defined in equation (4.19) and (4.20), we cannotestimate the values directly. Therefore, the simplest way is to rescale the gains with AFdisand AFvel which are aggressivity factors for each car driver:
ades,f = kd·AFdis· de + kv·AFvel· vrel + ka· aff (4.21)

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 76
Then, only the rescaling factors as shown in equation (4.21), should be estimated in real-time. In order to estimate the two aggressivity factors, AFdis and AFvel, optimal theorywas used. The logic found aggressivity factors minimizing the difference between currentacceleration and estimated acceleration of the front vehicle using the aggressivity factor.However, the logic proved to be too sensitive under different scenarios and steady stateconditions. Another approach is derived to estimate the two parameters simultaneouslyusing nonlinear system dynamics equations. We have system dynamics equations, includinga car-following model which is defined with nonlinear equations. Also, we can measure somestates with measurement noise. Therefore, the Unscented Kalman Filter (UKF) approachis one of the good options. Below is the procedure to estimate the aggressivity factors inreal-time.
• State Definition and System DynamicsStates can be defined as follow.
[x1, x2, x3, x4, x5, x6, x7, x8, x9]T
= [vf , af , drel,f , vrel,f , aff , ades,f , ˙aff , AFdis, AFvel](4.22)
Also, the system dynamics can be written as follows
x1 = af (4.23)
x2 = ades,f − τx · af (4.24)
x3 = vrel,f (4.25)
x4 = aff − af (4.26)
x5 = aff (4.27)
x6 = ˙ades,f (4.28)
x7 = jff = 0 (4.29)
x8 = AF dis = 0 (4.30)
x9 = AF vel = 0 (4.31)
where τx is time delay of a longitudinal control actuator and j is jerk(the derivativeof acceleration). From the equation (4.21), ades,f is derived analytically. Also, aff iscalculated from aff . However, x7, x8 and x9 are assumed to be constant states andhave only process noise since we do not know their exact values. Therefore, the valuesare updated with the process noise from the UKF approach.
• Measurement DefinitionEquations for measurement from vehicle sensors and radar are shown as follows. Theforward pointing radar can detect the front vehicle’s distance, velocity, and acceleration

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 77
as well as that of the vehicle in front of it.
y1 = vf +mv (4.32)
y2 = af +ma (4.33)
y3 = drel,f +mdis (4.34)
y4 = vrel,f +mvel,rel (4.35)
y5 = aff +ma,ff (4.36)
where, m is measurement noise.
• Unscented Kalman Filter ApproachDiscretized models can be derived from continuous models using Euler’s method. Thesystem dynamics and measurement can be written as follows.
x1(k + 1) = x1(k) + τsx2(k) +n1(k) (4.37)
x2(k + 1) = x2(k) + τs/τv × (x6(k)− x2(k)) +n2(k) (4.38)
x3(k + 1) = x3(k) + τsx4(k) +n3(k) (4.39)
x4(k + 1) = x4(k) + τs(x5(k)− x2(k)) +n4(k) (4.40)
x5(k + 1) = x5(k) + τsx8(k) +n5(k) (4.41)
x6(k + 1) = x6(k) + τsades(k) +n6(k) (4.42)
x7(k + 1) = x7(k) +n7(k) (4.43)
x8(k + 1) = x8(k) +n8(k) (4.44)
x9(k + 1) = x9(k) +n9(k) (4.45)
where τs and τv are sampling time and a lag of vehicle response due to a lower levelactuator, respectively. These equations can be compactly written as:
x(k + 1) = x(k) + τs × F (x(k), u(k), w(k)) + n(k) (4.46)
w(k + 1) = w(k) + r(k) (4.47)
y(k) = G(x(k), x(k), u(k)) +m(k), (4.48)
where x consists of x1 to x6, and w is the state to be estimated without direct mea-surements. n(k) and r(k) are process noise terms, and m(k) is the measurement noiseterm. A detailed UKF approach is already introduced in Section 2.5.1.

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 78
Step A : Fixed Acceleration Assumption
Step B : Aggressivity Factor Extraction
Step C : Desired Acceleration Calculation
Step D : Add Reality
[Leading Vehicle][Ego Vehicle]
[Front Vehicle]
Figure 4.6: Concept of Front Vehicle’s Future Motion Prediction
4.4 Step 3 : Front Vehicle’s Future Motion
Estimation
Here are the procedures for predicting the front vehicle’s future motion as shown in Figure4.6.
• Step A : Fixed Acceleration Assumption of the leading vehicleFirst, we assume that the leading vehicle keeps moving with a current constant acceler-ation during the prediction horizon. It is a reasonable assumption based on Stephanie’sresults [63] for short prediction times.
• Step B : Aggressivity Factor ExtractionThe UKF approach is used to estimate the aggressivity factor of the current frontvehicle driver in real-time using a car-following model. The estimation results shouldbe initialized whenever the ego vehicle meets a new front vehicle.
• Step C : Desired Acceleration CalculationWe know a base car-following model with aggressivity factors. Therefore, the frontvehicle’s desired acceleration is calculated from the equations.
• Step D : Adding Reality and Propagation of the MotionIn order to add reality, this research considers driver’s reaction delay, smooth driv-ing which can be achieved from limited jerk, maximum acceleration, and maximumdeceleration. Finally, from inter-vehicle dynamics between the front and the leadingvehicles, the desired acceleration sequence at current time, t, is propagated over theprediction horizon, N , as follows. The leading vehicle is assumed to be moving withconstant acceleration.
Aft = [aft (k), aft (k + 1), aft (k + 2), · · · , aft (k +N − 1)] (4.49)
If the leading vehicle does not exist, the aggressivity factor estimation (Step B) cannotbe executed and future accelerations of the front vehicle (Step D) are assumed to beconstant values.

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 79
200 m, 20 deg
60 m, 90 deg
Figure 4.7: Radar and its detection Coverage
4.5 Vehicle Test Results
Figure 4.7 shows the test vehicle setup. The Hyundai AZERA was equipped with a Delphi77GHz radar for frontal vehicle detection. The radar can detect 64 targets up to 200m infront of the vehicle. For real-time implementation, the dSpace Microautobox was used witha 0.2s sampling time. Vehicle tests were performed on Highway I-80 near Berkeley, CA asshown in Figure 4.8. In this paper, one example of tests is represented.Before showing aggressivity estimation results, we need to verify the estimation performanceof basic states (x1 to x5), which is measured by a radar. In Figure 4.9, estimation results andmeasurement results are shown in blue and red line, respectively. Vehicle velocity is less than60km/h. As shown in the graph, all estimation states follow measured states very well. Theother states (x6 to x9) are also estimated. For example, aggressivity factors, AFdis (x8) andAFvel (x9), are estimated in real-time, as shown in Figure 4.10. The distance gain aggressiv-ity factor reaches a value of almost 1 during 4 minutes. This means that the front driver’sreaction to the distance error is similar to the reaction of the base car following model. Thevelocity gain aggressivity factor is less than 1. This means that the front vehicle driver’s re-action to the relative velocity is smoother than the reaction of the base car-following model.

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 80
Figure 4.8: Vehicle Test Route
In this thesis, the base car-following model is assumed to show an average driver’s drivingstyle. Therefore, depending on the aggressivity factor’s value, the driver’s driving style canbe defined. In order to observe the consistency of the estimation of the driver aggressivityfactor, the test vehicle was driven to follow only one target vehicle for 4 minutes.Using the base car-following model and real-time estimated aggressivity factors, the frontvehicle’s future motion was calculated for the next 2 seconds at every 0.2 second, as shown inFigure 4.11. The results were shown at every 2 seconds to compare real motion and predictedmotion. In both graphs of velocity and acceleration, the predicted motion has very similarmovement to the real motion.A zoom-up graph is shown in Figure 4.12. The results of the proposed logic are compared tothe results of the constant acceleration method, which is very widely used. The green lineshows real velocity of the front vehicle. The blue line shows the velocity prediction of thefront vehicle using the proposed car-following model with aggressivity factor. The red lineshows the velocity prediction of the front vehicle using the constant acceleration method.Specifically, at velocity changing points, the suggested logic has much better predictionperformance than the prediction of the constant acceleration method. This performance isimportant in the point of safety and fuel efficiency improvement under velocity changing con-

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 81
0 50 100 150 200 2500
50
100
Vel
ocity
[km
/h]
Estimation vs. Measurement
EstimatedMeasured
0 50 100 150 200 250−2
0
2
Acc
eler
atio
n[m
/s2 ]
EstimatedMeasured
0 50 100 150 200 2500
20
40
60
Rel
ativ
e D
ista
nce[
m]
EstimatedMeasured
0 50 100 150 200 250−10
0
10
Rel
ativ
e V
eloc
ity[k
m/h
]
EstimatedMeasured
0 50 100 150 200 250−2
0
2
Fro
nt V
ehic
le A
ccel
[m/s2 ]
Time [sec]
EstimatedMeasured
Figure 4.9: State Estimation Results

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 82
0 50 100 150 200 2500
0.5
1
1.5
2
AF
Dis
Time [sec]
Distance Gain Aggressivity Factor
0 50 100 150 200 2500
0.5
1
1.5
2
AF
Vel
Time [sec]
Velocity Gain Aggressivity Factor
Figure 4.10: Aggressivity Factor Estimation Results
0 50 100 150 200 25010
20
30
40
50
60
70
Time[sec]
Vel
ocity
[km
/h]
Prediction of Future Movement
0 50 100 150 200 250−3
−2
−1
0
1
2
Time[sec]
Acc
eler
atio
n[km
/h]
Real Motion : VelocityPredicted for the next 2 sec
Real Motion : AccelerationPredicted for the next 2 sec
Figure 4.11: Future Motion Prediction(0-250 sec)

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 83
40 50 60 70 80 90 10010
15
20
25
30
35
Time[sec]
Vel
ocity
[km
/h]
Real Motion of the front vehiclePrediction for the next 2 sec : Using a Car Following ModelPrediction for the next 2 sec : Using Constant Acceleration
Figure 4.12: Future Motion Prediction(40-100 sec)
40 50 60 70 80 90 100−6
−4
−2
0
2
4
6
8
Time[sec]
Vel
ocity
[km
/h]
Prediction Error : Using a Car Following ModelPrediction Error : Using Constant Acceleration
Figure 4.13: Future Motion Prediction Error

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 84
0 0.5 1 1.5 2 2.5−2
−1
0
1
2
3
4
Prediction Time [sec]
Pre
dict
ion
Err
or [k
m/h
]
Car Following ModelConstant Acceleration Model
Figure 4.14: Future Motion Prediction Error Analysis
0 0.5 1 1.5 2 2.50
5
10
15
20
Prediction Time [sec]
Pre
dict
ion
Err
or D
iffer
ence
[%]
Figure 4.15: Future Motion Prediction Error Rate - Constant Acceleration Model vs. CarFollowing Model

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 85
ditions. The prediction error of both approaches is compared to the measured actual vehiclespeed of the front vehicle is shown in Figure 4.13. The results are shown for every 2 secondsfor simplicity. The graph clearly shows that the proposed approach using a car-followingmodel has smaller estimation error than that of the constant acceleration assumption model.Also, the performances of prediction for short time horizons (0.5s, 1.0s, 1.5s) are comparedin Figure 4.14. The graph shows the mean and the standard deviation of error betweenpredicted velocity and measured velocity of the front vehicle at each prediction time. Pre-diction errors using a car-following model and a constant acceleration assumption model areshown in red and blue lines, respectively. As prediction time increases, the car-followingmodel-based prediction has less errors. Figure 4.15 shows percent error of both models. Asthe prediction horizon increases, the prediction error using constant acceleration assumptionis 18% larger than the error from the car-following model method.Stephanie [63] showed that a car following model with an assumption of constant velocityor acceleration has the best prediction performance within 3 seconds. However, as we haveseen in this chapter, the car following model-based prediction has better performance thanthe acceleration models in this time horizon. Therefore, the proposed approach is reason-able, and additionally, if we improve the base car-following model, we may achieve betterprediction results.

CHAPTER 4. LONGITUDINAL DISTURBANCE ESTIMATION : FRONT VEHICLE’SFUTURE MOTION 86
4.6 Conclusion
In this chapter, a new car-following model was proposed. It is a deterministic and parametricmodel extracted from a well tuned ACC system. In order to extract driver’s driving style,a driver aggressivity factor was defined. Using the UKF approach, the aggressivity factorcould be extracted in real-time by comparing measurements and updating system states.By adopting a base car-following model and am aggressivity factor estimator on the frontvehicle, we could propagate the front vehicle’s future motion sequence for the next 2 seconds.Furthermore, real vehicle tests on public roads verified that the performance of the proposedapproach was better than that of the constant acceleration assumption method.

87
Chapter 5
Longitudinal Motion Controller : FuelEfficiency ACC associated with FrontVehicle’s Future Motion
5.1 Introduction
Recently, the Adaptive Cruise Control (ACC) System has become a well-adopted technol-ogy as an Advanced Driving Assistance System (ADAS). The system provides the occupantswith convenient driving without manipulation of gas and brake pedals. However, it focusesonly on control performance which tries to converge relative speed(preceding vehicle speed- ego vehicle speed) and relative distance error(relative distance - desired distance) to zero.In this chapter, another feature of ACC will be presented. The new algorithm is designedto improve fuel efficiency while maintaining good control performance.First, the motivation for the research and framework of the controller are introduced. Sec-ondly, some models for the controller are defined. Thereafter, the fuel efficiency distancecontroller is introduced. Finally, some simulation results, using real traffic data, are verifiedusing the suggested control law.
5.1.1 Motivation
For the vehicle equipped with automatic speed and distance control function, there are severalmethods that improve the ego(controlled) vehicle’s fuel consumption. First, if we know thetraffic signal and traffic conditions in advance, an optimal velocity profile can be generated tominimize waiting time at stop lights and total fuel consumption [4][61]. The second methodconsidered road slopes [13][25][44]. This is reasonable because longitudinal traction forceand fuel consumption are related to the up-down slope of the road profile. This methodis particularly useful for heavy truck. Third, Vehicle-to-Vehicle (V2V) communication wasadopted for a platoon control system [23][41][68]. The platoon with communication increased

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 88
traffic efficiency and decreased vehicle-to-vehicle distance to reduce air drag force. Also,optimal gear shift selection considering fuel consumption is another approach for controllingvehicle speed [38].This research focuses only on the distance control scenario with preceding vehicle informationusing a conventional sensor such as radar. Special information such as Look-ahead trafficsignal and road shape was not considered in this research. To focus on a normal ACC system,platoon dynamics or V2V communication were excluded. Therefore, we only have currentego vehicle’s information and current relative distance and velocity to the front vehicle. SinceJonathan [62] showed that fuel economy is very related to driver aggressivity, we need todevelop very smooth car-following distance controller. In Lang’s research [42], predictionof the preceding driver’s behavior improved fuel efficiency for cooperative adaptive cruisecontrol systems. If the front vehicle’s future movement is predicted, an optimal distanceand gear selection with smooth movement can be constructed. This research focuses ondeveloping logic that can improve fuel efficiency of an ACC equipped vehicle under normalsituations using conventional sensors. In the previous chapter, a front vehicle’s future motionsequence was predicted. The sequence is utilized for this fuel efficiency ACC controller.
5.1.2 Framework of Fuel Efficiency ACC Controller
Figure 5.1 shows a framework of an ACC controller. The logic consists of four parts. The freecruise control [FCC] logic is a basic logic to track a driver’s set speed. It calculates a desiredacceleration depending on the current velocity error. The Following Control [FOC] partis for distance control, to minimize relative velocity and distance error. The Curve SpeedLimit block controls the ACC vehicle on the curved road to avoid large lateral accelerationto prevent possible rollover. Then, three desired accelerations from each module are sent tothe selection block [min[FCC,FOC,CSL]]. The block selects minimum acceleration to sendout desired acceleration as a control input to an actuator of the vehicle. The block hassaturation and rate limiter(jerk limit) modules to maintain smooth ride quality. This thesisfocuses on the Following Control block as a distance controller. A Car-Following Modulecalculates the future motion of the front vehicle. Also, from the Following Control block, theOptimal Gear Selection block can derive a desired gear stage to minimize fuel consumption.

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 89
Free Cruise Control[FCC]
Following Control[FOC]
Curve Speed Limit[CSL]
Car Following Model[CFM]
Optimal Gear Selection[FOC]
Min[FCC,FOC,CSL]
Radar
Desired Acceleration
Desired Gear Stage
Figure 5.1: Framework of Fuel Efficiency ACC Controller
5.2 Modeling
To calculate optimal control input (acceleration) of the ego vehicle considering fuel consump-tion, some models need to be derived for a model-based controller.
5.2.1 Fuel Consumption and Vehicle Model
Since the goal of the logic is to minimize fuel consumption while controlling the vehicle withdesired speed and distance, the fuel model, which is applicable for the optimization problemis an essential part. In order to be to be easily included in the optimization problem, anaccurate yet simple model is needed. In this section, a new fuel consumption model is derivedfor this purpose. After that, a plant model is described.
• Fuel Consumption Model From Literature ReviewThere are several fuel consumption models that need to be taken into account for thisresearch. Engine Torque Based Model [40] is simple as shown in equation (5.1).
˙fuel = c1 + c2T (5.1)
where the fuel consumption rate, ˙fuel, is a function of engine torque, T . Also, c1 andc2 are parameters depending on the type of vehicle. However, this model does notconsider engine speed for calculating fuel consumption, despite it being one of the keyfactors for fuel consumption.The second model is the Engine Power Model [29] as shown in equation (5.2).
˙fuel = k1 + k2T + k3∆NS (5.2)

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 90
1000
2000
3000
4000
50
100
150
2000
5
10
15
20
25
Engine RPM [RPM]
Curve Fitting Graph
Engine Torque[Nm]
Fue
l Con
sum
ptio
n R
ate
[kg/
hour
]
Curve Fitted DataOriginal Data
Figure 5.2: Engine Fuel Consumption Map
where T is trip time per unit distance, ∆NS is a deviation from the average number ofstops per unit distance. Also, k1, k2 and k3 are parameters to be tuned. This modelconsiders the vehicle’s running time and stop counting. However, this model does notshow the transient motion of the vehicle.The third model is Comprehensive Power-Based Fuel Model [31].
˙fuel = α0 + α1P + α2P2 (5.3)
where P is the engine power and, α1, α2 and α3 are parameters to be tuned. Thismodel shows quite accurate fuel consumption. However, the three parameters shouldbe tuned under various conditions to accurately adopt the model to the controller.
• Fuel Consumption Model From Fuel Consumption MapAs shown in the previous section, there are several fuel consumption models. Used
widely in industry, a fuel consumption map is a function of engine speed and enginetorque. For this research, an accurate fuel consumption map is defined with ego vehi-cle’s states, such as velocity and acceleration. Therefore, a fuel consumption equation isderived using curve fitting from a fuel consumption map of the engine with a 1st-orderengine torque term and a 2nd-order engine speed term. The curve fitting equationsare shown in equation (5.4) and they match the fuel consumption map very closely,as shown in Figure 5.2. Only low-medium engine torque and speed range are usedbecause an ACC system uses limited acceleration and deceleration. The curve-fitted

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 91
−20 −15 −10 −5 0 5 10 15 20
0
0.2
0.4
0.6
0.8
1
Fuel Consumption[kg/hour]
(21 atan(50 x))/(20 π) + 19/40
Neg
ativ
e A
void
ing
Fac
tor
Figure 5.3: Negative Fuel Consumption Avoiding
fuel consumption model is derived as follows.
˙fuelbase = c0 + c1we + c2Te + c3w2e + c4weTe (5.4)
where we and Te are engine speed and engine torque. Also, c0 to c4 are coefficientsof the curve fitting results. If we assume that the torque converter is locked-up, thewheel is directly connected to the engine via final gear reduction and a transmission.Therefore, engine speed and engine torque can be written by using vehicle speed, vand acceleration, a as shown in equations (5.5) and (5.6). Therefore, these equationsallow us to derive the fuel consumption rate using ego vehicle states (velocity andacceleration) as follows.
we = 1Rw·Rf ·Rg
· v (5.5)
Te = Rw ·Rf ·Rg × (M · a+ Fair + Frr) (5.6)
where, Rw, Rf , Rg and M are wheel radius, final gear reduction, gear ratio and vehiclemass. Also, Fair and Frr are air drag force and rolling resistance. Also, air drag forcecan be calculated by the equation:
Fair =1
2ρ · A · Cair · v2 (5.7)
where ρ is air density, A is front area and Cair is air drag coefficient.
• Linearization and Adjustment of the Fuel Consumption ModelIn order to keep all systems in a linear quadratic form to guarantee a global optimal
solution and cheap calculation cost, linearized equations at each (v0, a0) point from thenonlinear curve fitted fuel consumption equation were calculated using the equation:
˙fuell(v, a) = f(v, a) =∂f
∂v· (v − v0) +
∂f
∂a· (a− a0) + f(v0, a0) (5.8)

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 92
However, under braking conditions(deceleration, a < 0), using the fuel consumptionequation lead to negative fuel consumption, although a real engine generates idle fuelconsumption of 1.13kg/hour. So, an arctan function in equation (5.9) is added atthe end of the fuel model to avoid negative fuel consumption and to generate idle fuelconsumption. The equation is as follows and the graph is shown in Figure 5.3.
˙fueladj = 1.05 · arctan(50 · ˙fuel)
π+ 0.475 (5.9)
Due to the above equation, the whole fuel consumption equation becomes a nonlinearfunction. Finally, the fuel consumption model can be defined as follows.
˙fuel = ˙fuell × ˙fueladj (5.10)
5.2.2 Plant and Distance Dynamics
• Plant DynamicsTo guarantee cheap calculation time, a very simple plant model is suggested. A simplepoint mass model is utilized to consider vehicle inertial motion.
v = a (5.11)
a = j (5.12)
where j is jerk of the ego vehicle.
• Actuator Dynamics and Delay TermFrom desired acceleration as a control input, the lower level actuators, such as brakeand engine torque controller, follow the value. This motion is considered as a first-orderlag as follows:
τaa(t) + a(t) = u(t) (5.13)
where τa is a time delay for longitudinal motion of the vehicle due to lower level con-troller (actuator) delay, a is acceleration and u is control input (desired acceleration).
• Discrete Model of Plant and ActuatorDiscretized models for the continuous dynamics can be written as follows.
a(k + 1) = (1− Tsτa
)a(k) +Tsτau(k) (5.14)
j(k) =a(k)− a(k − 1)
Ts(5.15)
where Ts is sampling time.
• Distance DynamicsAlso, in order to describe two vehicle’s relationship, such as relative distance andvelocity, the same definition as shown in Figure 4.3 is used.

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 93
5.3 Distance Controller
The essential goal of the distance controller is to converge the relative velocity and distanceerror to zero. For this purpose, a simple PID or LQ controller is very widely used in industry.However, to improve the ride comfort and fuel efficiency, a multi-purpose Model PredictiveControl (MPC) is suggested [60][64][66]. In this research, we consider nonlinear dynamics,a multi-purpose optimization problem, and the front vehicle’s future motion. Therefore, theNonlinear Model Predictive Control (NMPC) approach is a good option for this purpose.In this section, basic concepts of NMPC are described and a detailed control logic for fuelefficiency is followed. Finally, a method to determine optimal gear stage is suggested.
5.3.1 Control Law Design : Nonlinear Model Predictive Control
From continuous-time nonlinear system dynamics, a discrete-time nonlinear system dynam-ics, fd, and measurement update, hd, can be derived with n states and a fixed sampling time,Ts,
ξ(k + 1) = fd(ξ(k), u(k), k) (5.16)
ζ(k) = hd(ξ(k)) (5.17)
where ξ ∈ Rn and u, ζ ∈ Rm are state vector, input and output of the system, respectively.Also, the above system is subject to the following state constraints and input constraints,
ξ(k) ∈ X , u(k) ∈ U ,∀k ≥ 0 (5.18)
where X ⊆ Rn and U ⊆ Rm are usually defined with polyhedra. If the state is measuredor estimated at each time step, a finite time optimal control problem is solved at each timestep as follows.
minUk,Ξk
JN(Ξk, Uk)
s. t. ξi+1,k = fd(ξi,k, ui,k, i), i = k, . . . , k +N − 1
ξi,k ∈ X , i = k, . . . , k +N (5.19)
ui,k ∈ U , i = k, . . . , k +N − 1
ξk = ξ(k)
ξi+N,k ∈ Xf
The optimization problem is solved at time k and the predicted state, ξk,i, can be obtainedby applying the optimal control sequence, Uk. The predicted state trajectory and optimalcontrol input sequence are formulated as follows.
Ξk =[ξk ξk+1 . . . ξk+N+1
]T, (5.20)
Uk =[uk uk+1 . . . uk+N
]T, (5.21)

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 94
At each time step, k, the initial state is updated with ξk = ξ(k). The final propagated stateshould be constrained with a kind of polytope, Xf .Then, the cost function, JN(Ξk, Uk) : Rn × RNm → R+ is generally defined as,
JN(Ξk, Uk) = PN(ξ(N)) +N−1∑i=0
P (ξ(i), u(i)) +R(u(i)) (5.22)
where PN , P and R are terminal cost, state cost and input cost, respectively. From theoptimization problem, if the optimal input, U∗k = {u∗k,k, u∗k+1,k, . . . , u
∗k+N,k}, is found, the
optimal trajectory, Ξ∗k, can be generated. Then, we only apply the first optimal controlinput to the system:
u(k) = u∗k,k(ξ(k)) (5.23)
At the next time step, the optimization problem will be solved over the shifted time horizonusing the newly updated state ξ(k + 1). This concept uses Nonlinear Model PredictiveControl as a state feedback closed loop controller.
5.3.2 Controller without Optimal Gear Selection
A fuel efficiency ACC logic will be presented in this section without considering an optimalgear selection. Therefore, during the prediction horizon, we assume that the gear stage keepsthe current gear stage.
5.3.2.1 Control Goal
The basic control objective of the distance controller is to make distance error and relativespeed converge to zero. Distance error,de, and desired distance,ddes, can be calculated asfollows:
de = drel − ddes (5.24)
ddes = d0 + τh × v (5.25)
where τh is a time gap in seconds between two vehicles.
5.3.2.2 State Definition and System Dynamics
The states can be defined using models already defined in section 5.1. The states includean ego vehicle’s longitudinal motion and relative motion between an ego vehicle and a frontvehicle.
x1 = v : Ego Vehicle Velocity (5.26)
x2 = a : Ego Vehicle Acceleration (5.27)
x3 = j : Ego Vehicle Jerk (5.28)
x4 = drel : Clearance(Distance to the Front Vehicle) (5.29)
x5 = vf − v : Relative Velocity (5.30)

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 95
Also, the discretized state equations are written in the following form.
x(k + 1) = Ax(k) +Bu(k) +W (k) (5.31)
where W(k) is a disturbance term which represents acceleration of the front vehicle. It iswritten as af in the state equations. The information can be utilized by a car-followingmodel of the front vehicle. All discretized equations of motion can be written as follows:
x1(k + 1) = x1(k) + Tsx2(k) (5.32)
x2(k + 1) = (1− Tsτx
)x2(k) +Tsτxux(k) (5.33)
x3(k + 1) = − 1
τxx2(k) +
1
τxux(k) (5.34)
x4(k + 1) = x4(k) + Tsx5(k)− 1
2Ts
2x2(k) +1
2Ts
2af (k) (5.35)
x5(k + 1) = x5(k)− Tsx2(k) + Tsaf (k) (5.36)
5.3.2.3 Nonlinear MPC
The control output of the ACC logic is desired acceleration. To minimize velocity error anddistance error, optimal control theory is applied. However, model predictive control is betterthan a traditional optimal control since we can account for future motion of the front vehicle.
• Cost FunctionA simple quadratic cost function for the Finite Time Constrained Optimal Control isdefined in this form. In order to minimize fuel consumption, the fuel consumption costis included in the cost equation.
J =N−1∑k=0
{wu · uk2 + wdis · d2e + wvel · v2
rel + wfuel · ˙fuelk} (5.37)
where wu, wdis, wvel and wfuel are weighting factors for the cost function. Three termsare 2-norm and the fuel term is treated as an infinite norm case. This is becausethe total fuel consumption cost should be minimized under the control. As shownin equations (5.4) through (5.10), the fuel consumption rate is defined as a nonlinearequation which is a function of velocity and acceleration.
• ConstraintsThe first constraint is due to the limited control input as follows:
umin 5 u 5 umax (5.38)
Also, the input constraint matrix can be defined as follows:
Hu × u 5 Ku (5.39)

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 96
The second constraint set can be considered to improve driving quality. Accelerationand its change rate (jerk) should be constrained.
amin 5 a 5 amax (5.40)
jmin 5 j 5 jmax (5.41)
To guarantee safety, the maximum velocity of ego vehicle must not exceed the driver’sset speed.
v1 5 vset (5.42)
Also, the minimum distance between an ego vehicle and a front vehicle should bebounded for safety.
drel = ddes × ηmin (5.43)
where ddes is the driver’s desired distance and ηmin ∈ [0, 1] is the minimum distanceratio of the desired distance.All of these state constraints can be written in the following matrix form:
Hx × x 5 Kx (5.44)
5.3.3 Controller with Optimal Gear Selection
In this section, optimal gear selection of a transmission gear box is included in the recedinghorizon optimization problem. As shown in equations (5.5) and (5.6), gear ratio, which isdefined by gear stage, is directly connected to engine RPM, we, and engine torque, Te. Thesetwo factors are used for calculating fuel consumption, as shown in equation (5.4). Since fuelconsumption cost is included in the cost function of the optimization problem, optimal gearselection is meaningful for fuel efficiency ACC. However, if the optimal gear stage is includedin the Nonlinear Optimization Problem, it can be considered as a Mixed Integer NonlinearOptimization Problem, and finding the optimal solution is a very challenging process. Forimplementation of this research, the MPT toolbox with YALMIP as a formulation tool andIPOPT as an optimization problem solver for the Nonlinear MPC were used. However, forthe mixed integer nonlinear problem, no solver could be adopted to the formulation tool.As a second approach, three different gear stage cases (shift up case, shift down case andcurrent shift case) were considered at each time step as shown in Figure 5.4. The ego vehicleis assumed to keep the gear stage during prediction horizon. Then, at each time step, theNMPC finds the optimal solution and optimal cost for each shift-up, shift-down, and keepingcase, respectively. After that, the three stages’ cost were compared, and the minimum costfor the optimal gear stage was selected. Through this simple approach, we can verify whetherthe fuel optimal gear selection is valuable or not. Figure 5.5 shows an example of this concept.The blue line using shift up control shows the cost difference compared to the current shift

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 97
Shift Up CaseMPC
Current Gear Case MPC
Shift Down Case MPC
Current Gear Stage Find“Minimum Cost” Case
Desired Acceleration
Desired Gear Stage
Figure 5.4: Framework of Optimal Gear Selection
0 1 2 3 4 5 6 7 8 9 101400
1600
1800
2000
We[
rpm
]
Time[s]
Engine RPM
0 1 2 3 4 5 6 7 8 9 10−500
0
500T
e[N
m]
Time[s]
Engine Torque
0 1 2 3 4 5 6 7 8 9 100
5
10
15
20
Fue
l Rat
e[kg
/h]
Time[s]
Instant Fuel Consumption Rate
0 1 2 3 4 5 6 7 8 9 10−0.05
0
0.05
Cos
t Diff
eren
ce
Time[s]
Cost Difference from Current Gear Case : Shift Down CaseCost Difference from Current Gear Case : Shift Up CaseGear Change Threshold
0 1 2 3 4 5 6 7 8 9 105
5.5
6
Gea
r S
tage
Time[s]
Optimal Transmission Gear Stage
Figure 5.5: Example of Optimal Gear Selection
case. Also, the red line indicates the shift down case. In order to avoid frequent gear change,a gear change threshold (in dashed red line) was applied. Also, another constraint for gearchange was applied. For shift-down case, the engine RPM should be lower than 4000RPMin order to avoid engine overload. For the shift-up case, to avoid engine stall, the engineRPM should be larger than 800RPM. Using this concept, the optimal gear change can beconducted as shown in the bottom graph in Figure 5.5.

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 98
5.4 Simulation Results Using Real Traffic Data
In this section, three types of simulation results are presented. First, in order to validate thedistance controller, very basic scenarios were chosen. After that, associated with the frontvehicle’s future movement estimator, the Nonlinear Model Predictive Control Logic, withoutconsideration of optimal gear change is verified with real traffic data of the front vehicles.Finally, the optimal gear selection was taken into account for Mixed Integer Nonlinear ModelPredictive Control of fuel efficiency ACC.Simulations were performed using MATLAB based m-file and simulink files. For the vehicleplant, engine dynamics model, torque converter model, transmission gear model and lon-gitudinal vehicle force model without tire dynamics were used. The sampling time is 0.2seconds. YALMIP was used for MPC formulation and IPOPT was used as an optimizationsolver. In the receding horizon logic, 10 steps prediction and sampling time with 0.2 secondwere used.
5.4.1 Distance Controller Validation under Normal Scenarios
Three simple scenarios are suggested for validation of the controller. For the first scenario,Table 5.1 shows the simulation settings and the results are shown in Figure 5.6. This is avery normal scenario of the ACC system. When the ego vehicle follows a front vehicle, thefront vehicle makes a lane change, then the ego vehicle meets a new front vehicle at a furtherdistance. As we expect, the ego vehicle accelerates and decelerates to converge to the desiredgoal very smoothly, as shown in the Figure 5.6.
Table 5.1: Simulation Setting of Scenario 1
Set Speed 100km/hInitial Speed 80km/hInitial Distance 42mInitial Distance Error 17mScenario 1. following 80km/h vehicle and the front vehicle is cut-out
2. meet another 80km/h vehicle at 59m
The next scenario is another basic traffic condition as shown in Table 5.2. When the frontvehicle accelerates and then decelerates, the ego vehicle keeps safe distance as shown inFigure 5.7. The ego vehicle follows the front vehicle very smoothly while maintaining a safedistance.The last scenario is described in Table 5.3. The ego vehicle suddenly finds a slow moving
vehicle in the forward direction. Since the front vehicle is located at a further distance thanthe desired distance, the ego vehicle keeps going and then decelerates to keep safe distance,as shown in Figure 5.8.

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 99
0 1 2 3 4 5 6 7 8 9 1040
45
50
55
60
Dis
tanc
e[m
]
Time[s]
Desired DistanceClearance
0 1 2 3 4 5 6 7 8 9 1075
80
85
90
95
Vel
ocity
[kph
]
Time[s]
Ego VehicleFront Vehicle
0 1 2 3 4 5 6 7 8 9 10−3
−2
−1
0
1
2
Acc
el[m
/s2 ]
Time[s]
Desired Acceleration[Control Input]Current Acceleration
0 1 2 3 4 5 6 7 8 9 100
5
10
15
Fue
l Con
s[g]
Time[s]
Total Fuel Consumption During Prediction
0 1 2 3 4 5 6 7 8 9 100
200
400
600
800
Cos
t
Time[s]
Figure 5.6: Scenario 1 - Positive Distance Error
0 1 2 3 4 5 6 7 8 9 1041
42
43
44
45
Dis
tanc
e[m
]
Time[s]
Desired Distance
Clearance
0 1 2 3 4 5 6 7 8 9 1075
80
85
90
Vel
ocity
[kph
]
Time[s]
Ego VehicleFront Vehicle
0 1 2 3 4 5 6 7 8 9 10−3
−2
−1
0
1
2
Acc
el[m
/s2 ]
Time[s]
Desired Acceleration[Control Input]Current Acceleration
0 1 2 3 4 5 6 7 8 9 10−10
0
10
20
30
Cos
t
Time[s]
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
Fue
l Con
s[g]
Time[s]
Total Fuel Consumption During Prediction
Figure 5.7: Scenario 2 - Accelerating and Braking

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 100
Table 5.2: Simulation Setting of Scenario 2
Set Speed 100km/hInitial Speed 80km/hInitial Distance 42mInitial Distance Error 0mScenario 1. front vehicle’s accelerating with 1 m/s2 and keeping speed
2. front vehicle’s braking with -2 m/s2 and keeping speed
Table 5.3: Simulation Setting of Scenario 3
Set Speed 80km/hInitial Speed 80km/hInitial Distance 50mInitial Distance Error 18mScenario front slow moving vehicle cuts-in at 70km/h
From three basic examples, we can conclude that the control logic has good and stableperformance as a distance controller.
5.4.2 Distance Controller without Optimal Gear Selection UsingReal Traffic Data
The front vehicle’s future motion using real traffic data was fed in the NMPC logic duringthe prediction horizon. Also, during the prediction horizon (2 seconds), we assume that thegear stage has been kept at the current gear stage.In order to compare the performance of the suggested logic, a Linear-Quadratic based optimalcontroller was chosen as a reference controller. However, the LQ controller uses only currentinformation, such as relative velocity and distance. Figure 5.9 shows the control results.The ego vehicle follows the front vehicle very smoothly as shown in the distance and velocitygraphs. Also, during simulation, instant fuel consumption rate, which is a function of enginespeed and engine torque, was calculated using a fuel consumption map. The results areshown in the bottom graph of the figure.Figure 5.10 shows simulation results using the MPC approach. When the front vehiclemoves, the ego vehicle tracks the front vehicle’s velocity and desired distance. The thirdgraph shows the calculated optimal control input (desired acceleration) and the vehicle’scurrent acceleration. The control performance looks very similar to that of the LQ controller.However, focusing on the velocity profile shown in Figure 5.11 and 5.12, we can find twodifferentiating characteristics. The first advantage of the MPC controller is that considering

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 101
0 1 2 3 4 5 6 7 8 9 1035
40
45
50
Dis
tanc
e[m
]
Time[s]
Desired DistanceClearance
0 1 2 3 4 5 6 7 8 9 1065
70
75
80
85
Vel
ocity
[kph
]
Time[s]
Ego VehicleFront Vehicle
0 1 2 3 4 5 6 7 8 9 10−3
−2
−1
0
1
2
Acc
el[m
/s2 ]
Time[s]
Desired Acceleration[Control Input]Current Acceleration
0 1 2 3 4 5 6 7 8 9 100
50
100
150
Cos
t
Time[s]
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
Fue
l Con
s[g]
Time[s]
Total Fuel Consumption During Prediction
Figure 5.8: Scenario 3 - Slow Moving Front Vehicle
the front vehicle’s future motion has a safer reaction than when the front vehicle starts tobrake. As shown in Figure 5.11, the MPC controller decelerates earlier than the LQ controllerat 1.8 seconds in advance. If we consider platoon control, this feature can guarantee the stringstability of the system. The other important feature is the amplitude of velocity fluctuation.As shown in Figure 5.12, the velocity change amplitude of the MPC controller is smallerthat the amplitude of the LQ controller. For example, as shown in the figure, the MPCcontroller has 3.5km/h velocity fluctuation amplitude, and the LQ controller has 6.1km/hvelocity fluctuation amplitude. Therefore, the MPC controller has smoother response andthe ego vehicle does not have to accelerate or decelerate more than the LQ controller basedvehicle. As a result, this smooth response has the potential to improve fuel efficiency. Thesetwo advantages come from the prediction of the front vehicle’s motion.Focusing on fuel consumption, fuel consumption related results are shown in Figure 5.13.Engine speed of the MPC controller has a smoother response than the LQ controller. Also, inthe engine torque graph, under braking, negative engine torque due to engine friction torquewas observed. The torque graph using the MPC controller has a faster response than theLQ controller due to the prediction of the front vehicle’s movement. Depending on enginespeed and engine torque, the fuel consumption rate can be gathered as shown in the thirdgraph. During the simulation time(30 seconds), the total fuel consumption was gatheredfrom the fuel consumption map. Table 5.4 shows the fuel consumption results using bothapproaches. The MPC approach can improve fuel consumption by 3.67 % compared with

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 102
the LQ approach.
Table 5.4: Fuel Consumption Improvement of MPC Controller
Control Approach Fuel Consumption Fuel Efficiency ImprovementLQ 24.79g for 30 seconds -MPC 23.98g for 30 seconds 3.67%
5.4.3 Basic Distance Controller with Optimal Gear SelectionUsing Real Traffic Data
In addition to the MPC logic considering the future motion of the front vehicle, the controlledvehicle’s optimal gear selection was considered. The same traffic data and simulation settingsused in section 5.3.3 were applied. Control results, as shown in Figure 5.14, are very closeto the results when optimal gear selection was neglected, as shown in Figure 5.10. However,as shown on the last graph in Figure 5.15, the fuel optimal gear stage is different from thenormal gear stage. Engine speed and engine torque show different aspects while fuel rateis almost the same. This is because we need to place more weight on a basic goal of thecontroller (converging relative velocity and distance error to zero) than the fuel consumptionpart. Therefore, the velocity profile of fuel efficient ACC considering optimal gear stage hasa very similar trajectory to that of a normal fuel efficiency ACC, as shown in Figure 5.16.As a result, as shown in Table 5.5, the fuel optimal gear selection logic can only improve0.4 % for 30 seconds. Although the suggested logic does not show good performance forfuel economy, the controller to select fuel optimal gear stage may increase fuel efficiencyby adjusting weighting gain under different traffic scenarios. Furthermore, although theconventional gear selection is not perfectly optimal in terms of fuel consumption, it is tunedfor power and fuel optimality.
Table 5.5: Fuel Consumption Improvement of MPC Controller with Optimal Gear Selection
Control Approach Fuel Consumption Fuel Efficiency ImprovementMPC 23.98g for 30 seconds -MPC+Optimal Gear 23.90g for 30 seconds 0.4%

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 103
0 5 10 15 20 25 300
10
20
30
Dis
tanc
e[m
]
Time[s]
LQ Approach
Desired DistanceClearance
0 5 10 15 20 25 300
20
40
60
Vel
ocity
[kph
]
Time[s]
Ego VehicleFront Vehicle
0 5 10 15 20 25 30
−2
0
2
Acc
el[m
/s2 ]
Time[s]
Desired Acceleration[Control Input]Current Acceleration
0 5 10 15 20 25 300
5
10
Fue
l Rat
e[kg
/h]
Time[s]
Instant Fuel Consumption Rate
Figure 5.9: Distance Control Using LQ Controller

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 104
0 5 10 15 20 25 3010
15
20
25
Dis
tanc
e[m
]
Time[s]
MPC Approach
Desired DistanceClearance
0 5 10 15 20 25 300
20
40
60
Vel
ocity
[kph
]
Time[s]
Ego VehicleFront Vehicle
0 5 10 15 20 25 30
−2
0
2
Acc
el[m
/s2 ]
Time[s]
Desired Acceleration[Control Input]Current Acceleration
0 5 10 15 20 25 300
5
10
Fue
l Rat
e[kg
/h]
Time[s]
Instant Fuel Consumption Rate
Figure 5.10: Distance Control Using MPC Controller

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 105
Early Deceleration Timing Increasing Safety
Braking timing!1.8s
Figure 5.11: Distance Control Results Comparison - Velocity Profile for Braking Timing
MPC : 3.5KPH
Less Velocity Change Amplitude Increasing Fuel Efficiency
LQ : 6.1KPH
Velocity ChangeAmplitude!
Figure 5.12: Distance Control Results Comparison - Velocity Profile for Fuel Saving

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 106
0 5 10 15 20 25 30500
1000
1500
2000
We[
rpm
]
Time[s]
Engine RPM : MPCEngine RPM : LQ
0 5 10 15 20 25 30−100
0
100
200
300
Te[
Nm
]
Time[s]
Engine Torque : MPCEngine Torque : LQ
0 5 10 15 20 25 300
2
4
6
8
Fue
l Rat
e[kg
/h]
Time[s]
Instant Fuel Consumption Rate : MPCInstant Fuel Consumption Rate : LQ
0 5 10 15 20 25 302
2.5
3
3.5
4
Gea
r S
tage
Time[s]
Optimal Transmission Gear Stage : MPCOptimal Transmission Gear Stage : LQ
Figure 5.13: Distance Control Results Comparison - Fuel Consumption
5.5 Conclusion
In this chapter, a basic distance controller was proposed using the Nonlinear MPC approach.But, in order to improve fuel efficiency, a fuel consumption model was included in the op-timization problem. The fuel consumption model was derived from a real vehicle’s fuelconsumption map. Through basic simulations, the control logic was validated.In the previous chapter, the front vehicle’s future motion estimator was suggested. From thismodule, a sequence of the future motion was fed to the distance controller. Considering thefuture motion in the optimization problem, the fuel efficiency ACC logic improved fuel econ-omy by 3.67% under real traffic data. This is because the controller makes the ego vehicle’svelocity profile very smooth to prevent abrupt acceleration and deceleration. Consequently,this approach is meaningful for real vehicle implementation to improve fuel efficiency for adistance controller.

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 107
0 5 10 15 20 25 3010
15
20
25
Dis
tanc
e[m
]
Time[s]
MPC Approach
Desired DistanceClearance
0 5 10 15 20 25 3010
20
30
40
50
Vel
ocity
[kph
]
Time[s]
Ego VehicleFront Vehicle
0 5 10 15 20 25 30−3
−2
−1
0
1
2
Acc
el[m
/s2 ]
Time[s]
Desired Acceleration[Control Input]Current Acceleration
0 5 10 15 20 25 300
2
4
6
8
Fue
l Rat
e[kg
/h]
Time[s]
Instant Fuel Consumption RateFigure 5.14: Distance Control Considering Optimal Gear Selection
Lastly, simple optimal gear selection logic was suggested. Although the optimal solutioncould not improve the fuel economy as anticipated, the suggested concept can be tuned forother traffic scenarios.

CHAPTER 5. LONGITUDINAL MOTION CONTROLLER : FUEL EFFICIENCY ACCASSOCIATED WITH FRONT VEHICLE’S FUTURE MOTION 108
0 5 10 15 20 25 30500
1000
1500
2000
We[
rpm
]
Time[s]
0 5 10 15 20 25 30−100
0
100
200
300
Te[
Nm
]
Time[s]
0 5 10 15 20 25 300
2
4
6
8
Fue
l Rat
e[kg
/h]
Time[s]
0 5 10 15 20 25 301
2
3
4
5
Gea
r S
tage
Time[s]
Engine RPM : MPC+GearEngine RPM : MPC
Engine Torque : MPC+GearEngine Torque : MPC
Fuel Consumption Rate : MPC+GearFuel Consumption Rate : MPC
Gear Stage : MPC+GearGear Stage : MPC
Figure 5.15: Distance Control Considering Optimal Gear Selection - Gear Stage
0 5 10 15 20 25 3010
20
30
40
Vel
ocity
[kph
]
Time[s]
Ego Vehicle[MPC+Gear]Ego Vehicle[MPC]
Figure 5.16: Distance Control Considering Optimal Gear Selection - Velocity Profile

109
Chapter 6
Conclusions and Future Work
This thesis presented disturbance estimators and controllers associated with the disturbancesfor an autonomous vehicle, such as a longitudinal distance controller and a lateral lanekeeping controller.
6.1 Conclusions
• Lateral Disturbance EstimationIn order to estimate road bank angle as a disturbance term for the lane keeping con-troller, in chapter 2, a kinematic relationship between the road shape and sensor mea-surements was proposed. All measurements were gathered at the vehicle body usingonly conventional vehicle sensors. Also, through longitudinal and lateral vehicle dy-namics, the longitudinal road gradient and the lateral road bank angle were estimatedsimultaneously. In order to keep nonlinearity of the kinematics and dynamics, a dual-UKF approach was used. The proposed estimation approach was verified on a realvehicle at a special proving ground. After that, we observed that the estimator wasable to extract longitudinal road gradient and bank angle simultaneously on publicroads in real-time. The main contribution of this research is that a dual-UKF algo-rithm was suggested to estimate the longitudinal road gradient, the lateral road bankangle, and the vehicle body’s roll angle simultaneously using only conventional vehiclesensors. As a result from real vehicle tests on public roads, the estimation error meanof the road bank angle was 0.08 degree.
• Lateral Motion ControllerIn chapter 3, a lane keeping controller associated with the road bank angle estimatorwas proposed. First, a steady state dynamic model to describe lateral vehicle dynamicsover all speed ranges was derived. It was also useful to consider the bank angle effect.Through simulation and real vehicle tests, it was found that the model was reasonableand accurate. The model was also used to derive error dynamics for lateral offsetand heading errors for lane keeping and path following situations. From the steady

CHAPTER 6. CONCLUSIONS AND FUTURE WORK 110
state dynamic model and error dynamics, a lane keeping controller using the RHSCapproach was designed. The control approach was simple to formulate and easy toadd constraints to the receding horizon technique based on a system dynamics model.Through simulation, the controller and dynamics models were verified. After that, realvehicle tests were performed on public roads. Simultaneously, road angle estimationresults were fed to the lane keeping controller to compensate for the lateral forcedisturbance effect. The proposed control logic was very good in keeping the vehicle tofollow the lane. The main contribution of this research is the derivation of a steadystate vehicle dynamics model for lateral vehicular motion to be utilized for a lanekeeping controller over all vehicle speed ranges. Furthermore, the model includes roadbank angle and tire side-slip effects.
• Longitudinal Disturbance EstimationIn chapter 4, the front vehicle’s future motion was considered as a disturbance term forthe longitudinal distance controller. First, a new car-following model was proposed,that was deterministic and parametric, based on a well-tuned ACC system. Afterthat, in order to extract the driver’s driving style, a driver aggressivity factor wasderived. Using the UKF approach, and comparing measurements with newly updatedsystem states, the aggressivity factor was extracted in real-time. By adopting a basecar-following model and an aggressivity factor estimator on the front vehicle, we couldpropagate the front vehicle’s future motion. Also, through real vehicle tests on publicroads, the performance of the proposed approach was verified. Therefore, anotherimportant contribution of this research is a new car-following model to describe thefront vehicle’s longitudinal speed control motion with an aggressivity factor estimator.
• Longitudinal Motion ControllerIn chapter 5, a Fuel Efficiency Adaptive Cruise Control as a distance controller asso-ciated with the front vehicle’s future motion was introduced. First, a basic distancecontroller was proposed using the Nonlinear MPC approach. And then, in order toimprove fuel efficiency, a fuel consumption model was included in the optimizationproblem. The fuel consumption model was derived from a real vehicle’s fuel consump-tion map. Through basic simulations, the control logic was validated. From the workin chapter 4, a sequence of the front vehicle’s future motion was acquired, and used bythe distance controller. By considering the future motion in the optimization problem,the fuel efficiency ACC logic improved fuel economy by 3.67% under real traffic data.This was due to the controller making the ego vehicle’s velocity profile very smooth toprevent abrupt acceleration and deceleration. Consequently, the approach in this thesiswas meaningful for real vehicle implementation. Lastly, simple optimal gear selectionlogic was suggested. However, the optimal solution could not improve the fuel economyas anticipated. Although the suggested logic does not show good performance for fueleconomy, the controller to select fuel optimal gear stage may increase fuel efficiencyby adjusting weighting gain under different traffic scenarios. Furthermore, although

CHAPTER 6. CONCLUSIONS AND FUTURE WORK 111
the conventional gear selection is not perfect for optimal fuel consumption, it is tunedfor power and fuel optimality. A contribution of this research is the derivation andsimulation of an algorithm for ACC with a new fuel consumption model.
From this research, disturbances for each longitudinal and lateral vehicle controller wereestimated as deterministic values. These values were effectively included in the formulationsof controllers and consequently, control performance improved.

CHAPTER 6. CONCLUSIONS AND FUTURE WORK 112
0 20 40 60 80 100 1200
10
20
30
40
50
60
70
80
Vehicle Speed[kph]
Cle
arac
ne[m
]
Time Gap : Driver #1
Time Gap=1.0951
0 20 40 60 80 100 1200
10
20
30
40
50
60
70
80
Vehicle Speed[kph]
Cle
arac
ne[m
]
Time Gap : Driver #2
Time Gap=1.8322
Figure 6.1: Timegap Variation
6.2 Future Work
In this research, some models and approaches were suggested and validated. To prove gen-erality of the results, further work may be needed.
• Car-Following ModelIn chapter 2, a car-following model extracted from a well-tuned ACC system wassuggested. It consists of some nonlinear equations. However, we cannot guaranteethat the equations alway represent the driver’s car following motion. It was only usedfor suggesting a method to predict the following vehicle’s future motion. Therefore,as a future work, we can gather a large data set of different driver’s car-followingdata and extract a representative car-following equation to describe the behavior. Itmay require significant effort, but it would allow us to derive a more generalized car-following model. In addition to that, in this research, it is assumed that all vehicledrivers have the same timegap tendency in following a front vehicle despite the fact thateach vehicle driver has a different timegap. Preliminary research is conducted to verifythis assumption. Figure 6.1 shows comparison of timegap of two vehicle drivers. Datawas acquired on highways using a radar to detect the clearance to the front vehicle. Asshown in the graphs, one driver’s timegap is 1.09s and the other’s is 1.83s. Therefore,as a future work, a generalized car-following model including timegap tendency shouldbe generated using real vehicle test data.
• Fuel Efficiency Improvement TestIn chapter 5, a Fuel Efficiency ACC system was proposed. However, the performancewas only validated under simulations. Therefore, real vehicle tests under various sce-narios may be conducted in the future.

CHAPTER 6. CONCLUSIONS AND FUTURE WORK 113
Figure 6.2: Interested Vehicles for Lane Change
• Improving an Automatic Lane Change AlgorithmAn automatic lane change function is an important feature of autonomous vehicles.However, if the controller considers only the current situation of the ego vehicle andsurrounding traffic, it is sometimes impossible to make a lane change, although a humandriver can. Therefore, if a car-following model is adopted on the surrounding vehicles,we can predict their motions, and the ego vehicle has better chances for lane changemaneuver. This can be a further extended topic of disturbance estimation research. Aspreliminary research, a simple logic is derived to consider lateral offset(ey) and relativedistances(d2, d3, d4) to the surrounding vehicles as shown in Figure 6.2. System statecan be defined as follows:
x1 = v1 : Ego Vehicle Velocity (6.1)
x2 = a1 : Ego Vehicle Acceleration (6.2)
x3 = j1 : Ego Vehicle Jerk (6.3)
x4 = d2 : Distance to V2 (6.4)
x5 = v2 − v1 : Relative Velocity to V2 (6.5)
x6 = d3 : Distance to V3 (6.6)
x7 = v3 − v1 : Relative Velocity to V3 (6.7)
x8 = d4 : Distance to V4 (6.8)
x9 = v4 − v1 : Relative Velocity to V4 (6.9)
x10 = ey : Distance to the Adjacent Lane Center (6.10)
x11 = ey : Lateral Velocity (6.11)
x12 = ey : Lateral Acceleration (6.12)

CHAPTER 6. CONCLUSIONS AND FUTURE WORK 114
Discretized system dynamics can be defined as follows:
x1(k + 1) = x1(k) + Tsx2(k) (6.13)
x2(k + 1) = (1− Tsτx
)x2(k) +Tsτxux(k) (6.14)
x3(k + 1) = − 1
τxx2(k) +
1
τxux(k) (6.15)
x4(k + 1) = x4(k) + Tsx5(k)− 1
2Ts
2x2(k) +1
2Ts
2a2(k) (6.16)
x5(k + 1) = x5(k)− Tsx2(k) + Tsa2(k) (6.17)
x6(k + 1) = x6(k) + Tsx7(k)− 1
2Ts
2x2(k) +1
2Ts
2a3(k) (6.18)
x7(k + 1) = x7(k)− Tsx2(k) + Tsa3(k) (6.19)
x8(k + 1) = x8(k) + Tsx9(k) +1
2Ts
2x2(k)− 1
2Ts
2a4(k) (6.20)
x9(k + 1) = x9(k) + Tsx2(k)− Tsa4(k) (6.21)
x10(k + 1) = x10(k) + Tsx11(k) +1
2Ts
2x12(k) (6.22)
x11(k + 1) = x11(k) + Tsx12(k) (6.23)
x12(k + 1) = (1− Tsτy
)x11(k) +1
τyuy(k) (6.24)
If a MPC logic is constructed, acceleration terms of surrounding vehicles(a2, a3, a4)are needed for future state propagation. For example, when as a distance controllerassociated with the front vehicle’s future motion, ego vehicle(V1) changes lanes, thefuture acceleration(a4) of the behind vehicle in as a distance controller associatedwith the front vehicle’s future motion, adjacent lane(V4) can be predicted using acar-following model on the vehicle.

115
Bibliography
[1] Highway Design Manual. California Department of Transportation, 2006.
[2] H. Peng A. Y. Ungoren and H. E. Tseng. Experimental verificatiion of lateral speedestimation methods. In Proceedings of AVEC 2002 6th Int.Symp. on Advanced VehicleControl, Hiroshima, Japan, 2002.
[3] P. S. addison and D. J. Low. A novel nonlinear car-following model. Chaos, 8(4):791–799, 1998.
[4] Behrang Asadi and Ardalan Vahidi. Predictive use of traffic signal state for fuel saving.In 12th IFAC Symposium on Control in Transportation Systems, 2009.
[5] M. A. Brackstone B. Sultan and M. Macdonald. Drivers’ use of deceleration and acceler-ation information in car-following process. Transportation Research Record, (1883):31–39, 2004.
[6] Seung-Hi Lee Chang Mook Kang and Chung Choo Chung. Comparative evaluationof dynamic and kinematic vehicle models. In 53rd IEEE Conference on Decision andControl, LA, USA, 2014. IEEE.
[7] John Andrews Cunjia Liu, Wen-Hua Chen. Tracking control of small-scale helicoptersusing explicit nonlinear mpc augmented with disturbance observers. Control Engineer-ing Practive, 20:258–268, 2012.
[8] R. Herman D. C. Gazis and R. W. Rothery. Nonlinear follow-the-leader models of trafficflow. In Operational Research, 1961.
[9] A. Nishio et al. Development of vehicle stability control system based on vehicle sideslipangle estimation. SAE, (2001-01-0137), 2001.
[10] Ashwin Carvalho et al. Predictive control of an autonomous ground vehicle using aniterative linearization approach. In 16th International IEEE Annual Conference onIntelligent Transportation Systems, Hague, Netherlands, 2013.
[11] Changchun Liu et al. Nonlinear stochastic predictive control with unscented transforma-tion for semi-autonomous vehicles. In American Control Conference, Portland, Oregon,USA, 2014.

BIBLIOGRAPHY 116
[12] El-Shaimaa Nada et al. Modified duel unscented kalman filter approach for measuringvehicle states and vehicle parameters. International Journal of Engineering Researchand Technology, 3(8):1423–1430, 2014.
[13] Erik Hellstrm et al. Look-ahead control for heavy trucks to minimize trip time and fuelconsumption. Control Engineering Practice, 17(2):245–254, 2008.
[14] Guenther et al. Lateral stiffnes, cornering stiffness and relaxation length of the pneu-matic tire. SAE Technical Paper Series, (900129), 1990.
[15] H. E. Tseng et al. Development of vehicle stability control at ford. IEEE/ASMETransactions on Mechatronics, 4(3):223–234, 1999.
[16] J. Hahn et al. Road bank angle estimation using disturbance observer. In Proceedingsof AVEC 2002 6th Int.Symp. on Advanced Vehicle Control, Hiroshima, Japan, 2002.
[17] J. Ryu et al. Vehicle sidelsip and roll parameter estimation using gps. In Proceedingsof AVEC 2002 6th Int.Symp. on Advanced Vehicle Control, Hiroshima, Japan, 2002.
[18] Jihan Ryu et al. Estimation of vehicle roll and road bank angle. In Proceedings of 2004American Control Conference, Boston, USA, 2004.
[19] Norimitsu Ikami et al. Online parameter estimation of driving behavior usingprobability-weighted arx models. In 14th International IEEE Conference on Intelli-gent Transportation Systems, Washington, DC, USA, 2011.
[20] T. A. Wenzel et al. Duel extended kalman filter for vehicle state and parameter estima-tion. Vehicle System Dynamics, 44(2):153–171, 2006.
[21] Valerio et al. Linear model predictive control for lane keeping and obstacle avoidanceon low curvature roads. In 16th International IEEE Annual Conference on IntelligentTransportation Systems, Hague, Netherlands, 2013.
[22] Yiqi Gao et al. A tube-based robust nonlinear predictive control approach to semiau-tonomous ground vehicles. Vehicle System Dynamics: International Journal of VehicleMechanics and Mobility, 2014.
[23] Jan P. Huissoon Steven L. Waslander Feyyaz Emre Sancar, Baris Fidan. Mpc based col-laborative adaptive cruise control with rear end collision avoidance. In IEEE IntelligentVehicles Symposium Proceedings, Dearborn, Michigan, USA, 2014.
[24] A. Bemporad Francisco Borrelli and M. Morari. Predictive Control for linear and hybridsystems. 2014.
[25] Hellstrm E. Frberg, A. and L Nielsen. Explicit fuel optimal speed profiles for heavytrucks on a set of topographic road profiles. SAE Technical Paper, (2006-01-1071),2006.

BIBLIOGRAPHY 117
[26] F. Gunawan. Two-vehicle dynamics of the car-following models on realistic drivingcondition. Journal of Transportation Systems Engineering and Information Technology,12(2):67–75, 2012.
[27] Andreas Hansen and J. Karl Hedrick. Receding horizon sliding control for linear andnonlinear systems. In American Control Conference, Chicago, USA, 2015.
[28] W. Helly. Simulation of bottlenecks in single lane traffic flow. In Proceedings of theSymposium on Theory of Traffic Flow, New York, 1959.
[29] Robert Herman and Siamak Ardekani. The influence of stops on vehicle fuel consump-tion in urban traffic. Transportation Science, 19(1), 1985.
[30] R. Hermann and Arthur J. Krener. Nonlinear controllability and observability. IEEETransactions on Automatic Control, 22(5):728, 1977.
[31] Kevin Moran Bart Saerens Hesham Rakha, Kyongho Ahn and Eric Van den Bulck.Simple comprehensive fuel consumption and co2 emission model based on instantaneousvehicle power. In Transportation Research Board 90th Meeting, 2011.
[32] Riley G. W. Heydinger, G. J. and J. P. Chrstos. Importance of tire lag on simulatedvehicle response. SAE Technical Paper Series, (910135), 1991.
[33] H. Kim I. Kim and K. Huh. Development of estimation algorithms for vehicle’s massand road grade. International Journal of Automotive Technology, 14(6):889–895, 2013.
[34] M. Innoocenti and M. Falorni. State constrained sliding model controllers. In AmericanControl Conference, 1998.
[35] B. G. Cao J. Y. Cao and Z. Liu. Driving resistance estimation based on unknown inputobserver. Journal Appl. Sciences, 6(4):888–891, 2006.
[36] Z. Liu J. Zhou and R. Pei. Sliding mode model predictive control with terminal con-straints. In Proceedings of the 3rd World Congress on Intelligent Control and Automa-tion, Hefei, China, 2000.
[37] Georg Schildbach Jason Kong, Mark Pfeiffer and Francesco Borrelli. Kinematic anddynamic vehicle models for autonomous driving control design. In IEEE IntelligentVehicles Symposium, Seoul, Korea, 2015. IEEE.
[38] Gianantonio Bortolinb Jiali Fua. Gear shift optimization for off-road construction ve-hicles. Social and Behavioral Sciences, 54, 2012.
[39] Xinghuo Yu Jun Yang, Shihua Li. Sliding model control for systems with mismatcheduncertainties via a disturbance observer. IEEE Transactions on Industrial Electronics,60(1):160–169, 2013.

BIBLIOGRAPHY 118
[40] Nicholas J. Kohut. Integrating traffic data and model predictive control to improve fueleconomy. Master’s thesis, University of California, Berkeley, 2009.
[41] Bart De Schutter Lakshmi Dhevi Baskar and Hans Hellendoorn. Model predictive con-trol for intelligent speed adaptation in intelligent vehicle highway systems. In 17th IEEEInternational Conference on Control Applications, Part of 2008 IEEE Multi-conferenceon Systems and Control, San Antonio, Texas, USA, 2008.
[42] Schmied R. Lang, D. and L Del Re. Prediction of preceding driver behavior for fuelefficient cooperative adaptive cruise control. SAE Int. J. Engines, 7(1):14–20, 2014.
[43] D. G. Luenberger. An introduction to observers. IEEE/ASME Transactions on Auto-matic Control, 47(12), 1971.
[44] Masakazu Mukai M. A. S. Kamal. Ecological vehicle control on roads with up-down slopes. IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYS-TEMS, 12(3):783–794, 2011.
[45] A. Hennecke M. Treiber and D. Helbing. Congested traffic states in empirical observa-tions and microscopic simulations. Physical Review E, 62(2):1805–1824, 2000.
[46] Xiaoliang Ma and Magnus Jansson. Model estimation for car-following dynamics basedon adaptive filtering approach. In Proceedings of the 2007 IEEE Intelligent Transporta-tion Systems Conference, Seattle, WA, USA, 2007.
[47] Mattias Dagen Mark Wielitzka and Tobias Ortmaier. State estimation of vehicle’slateral dynamics using unscented kalman filter. In 53rd IEEE Conference on Decisionand Control, LA, USA, 2014. IEEE.
[48] H. Nijmeijer. Observability of autonomous discrete time non-linear systems: a geometricapproach. International Journal of Control, 36(5):867, 1982.
[49] U.S. Department of Transportation. TRAFFIC SAFETY FACTS 2013.
[50] T. Wakita K. Takeda C. Miyajima P. Angkititrakul, T. Ryuta and T. Suzuki. Evaluationof driver-behavior models in real-world carfollowing task. In Proc. IEEE InternationalConference on Vehicular Electronics and Safety, 2009.
[51] M. Saunders P. Gill, W. Murray and M. Wright. User’s guide for NPSOL (version 4.0).Systems Optimization Laboratory, Stanford University, Stanford, CA.
[52] T. Nakatsuji P. Ranjitkar and A. Kawamua. Car-following models: an experimentbased benchmarking. Journal of the Eastern Asia Society for Transportation Studies,6:1582–1596, 2005.
[53] S. Panwai and H. Dia. Comparative evaluation of microscopic carfollowing behavior.IEEE Transactions on Intelligent Transportation Systems, 6(3):314–325, 2005.

BIBLIOGRAPHY 119
[54] S. Panwai and H. Dia. Neural agent car-following models. IEEE Transactions onIntelligent Transportation Systems, 8(1):60–70, 2007.
[55] Rajesh Rajamani. Vehicle Dynamics and Control. Springer.
[56] Ilya Kolmanovsky Reza Ghaemi, Jing Sun. Computationally efficient model predictivecontrol with explicit disturbance mitigation and constraint enforcement. In 45th IEEEConference on Decision & Control, San Diego, CA, USA, 2006.
[57] J. K. Uhlmann S. J. Julier and H. Durrant-Whyte. A new approach for filtering nonlinearsystems. In American Control Conference, 1995.
[58] Francesco Borrelli Sanghyun Hong, Chankyu Lee and J. Karl Hedrick. A novel approachfor vehicle inertial parameter identification using a dual kalman filter. IEEE TRANS-ACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, 16(1):151–161, 2015.
[59] Y. Sebsadji. Vehicle roll and road bank angles estimation. In Proceedings of the 17thWorld Congress The International Federation of Automatic Control, Seoul, Korea, 2008.
[60] Rajesh Rajamani Shengbo Li, Keqiang Li and Jianqiang Wang. Model predictive multi-objective vehicular adaptive cruise control. IEEE TRANSACTIONS ON CONTROLSYSTEMS TECHNOLOGY, 19(3):556–566, 2011.
[61] Kanok Boriboonsomsin Sindhura Mandava and Matthew Barth. Arterial velocity plan-ning based on traffic signal information under light traffic conditions. In Proceedings ofthe 12th International IEEE Conference on Intelligent Transportation Systems, 2009.
[62] Jonathan Seth Stichter. Investigation of vehicle and driver aggressivity and relation tofuel economy testing. Master’s thesis, Univerity of Iowa, 2012.
[63] Ruzena Bajcsy Stphanie Lefvre, Chao Sun and Christian Laugier. Comparison of para-metric and non-parametric approaches for vehicle speed prediction. In American ControlConference, Portland, Oregon, USA, 2014.
[64] Y. Luo T. Chen and K. Li. Multi-objective adaptive cruise control based on nonlin-ear model predictive algorithm. In 2011 IEEE International Conference on VehicularElectronics and Safety (ICVES), Beijing, China, 2011.
[65] L. Nielsen U. Kiencke. Automotive Control Systems for Engine, Driveline, and Vehicle.Springer.
[66] William L. Garrard Vibhor L. Bageshwar and Rajesh Rajamani. Model predictivecontrol of transitional maneuvers for adaptive cruise control vehicles. IEEE TRANS-ACTIONS ON VEHICULAR TECHNOLOGY, 53(5):1573–1585, 2004.

BIBLIOGRAPHY 120
[67] E. A. Wan and R. Van der Merwe. The unscented kalman filter for nonlinear estimation.In Adaptive Systems for Signal Processing, Communications, and Control Symposium.IEEE, 2000.
[68] Jianlong Zhang and Petros A. Ioannou. Longitudinal control of heavy trucks in mixedtraffic: Environmental and fuel economy considerations. IEEE TRANSACTIONS ONINTELLIGENT TRANSPORTATION SYSTEMS, 7(1):92–104, 2006.