Embed Size (px)
Citation preview

DEGREE PROJECT IN TECHNOLOGY, FIRST CYCLE, 15 CREDITS STOCKHOLM, SWEDEN 2016
Control of Leaning Dynamics for Three-wheeled Vehicles
Experimental evaluation of two control strategies
ROBERT GRÖNING
GUSTAV STEN

ENGINEERING AND MANAGEMENT

I
ABSTRACT Three‐wheelersarepopular in fuelefficient contestsbutdonot seemuchcommercialsuccess.Thiscouldbebecausethree‐wheelersareeasiertotipoverthanfourwheeledvehicles. Oneway to counteract the tipping over is to introduce leaning dynamics onthree‐wheeledvehiclessothattheyleanincornerslikebicyclesandmotorcyclescan.For this project a small radio‐controlled three‐wheeler was built with a mechanicalsystemtohandletheleaningdynamicsforthefrontwheelpair.Fortheleaningcontroltwo different controllerswere programmed to be compared, one relying on feedbackfrom an accelerometer. The other calculates the desired angle based on amechanicalmodel with feedback from a potentiometer that measures the current leaning angle.Thesecontrollerswhere tested indoorsona smoothsurfaceandoutdoorsona roughsurfacetocomparethetwo.Bothcontrollersperformedwellindoorsbutthecontrollerrelyingonfeedbackfromthepotentiometer was more stable than the one relying on the accelerometer. Testingoutdoors on a rough surface amplified the differences. That test showed that thecontrollerusinganaccelerometerwassounstableitbarelycouldprovideanyleaningatallwhile the one using a potentiometer delivered very similar result as indoors. Thiswasprobablyduetotheaccelerometerssensitivitytovibration.Thecontrollerusingtheaccelerometerforfeedbackwasslowerandmoreunstablebutcankeepthevehicleleveledonleaninggroundsinceitmeasurestheactualaccelerationthe vehicle experiences. The controller using a potentiometer for feedbackwas fasterandmorestablebutonlyusestheleaningdynamicwhileturningwithouttakingotheraccelerationsintoaccount.
Bachelor’s Thesis MMKB 2016:23 MDAB 084
Leaning Dynamics on Three-wheelers
Robert Gröning
Gustav Sten
Approved
2016-06-07
Examiner
Martin Edin Grimheden Supervisor
Lars Svensson

II

III
SAMMANFATTNING Trehjulingar är populära i bränsleeffektivitetstävlingar men har inte sett mycketkommersiell framgång. Detta kan bero på att trehjulingar välter lättare än fyrhjuladefordon. Ett sätt att motverka vältningen är att introducera lutningsdynamik påtrehjulingarsåattdelutarinikurvorsomcyklarochmotorcyklar.Fördethärprojektetbyggdesen litenradiostyrdtrehjulingmedettmekanisktsystemföratthantera lutningenmedframhjulen.Förattkontrollera lutningendesignadestvåolikaregulatorerförattjämföras,ensomförlitarsigpåfeedbackfrånenaccelerometeroch en som beräknar en vinkel enligt en mekanisk modell med feedback från enpotentiometer som mäter fordonets nuvarande vinkel. Dessa regulatorer testadesinomhuspåenjämnytaochutomhuspåenojämnyta.Bådaregulatorernahadegodprestandainomhusmenregulatornsomanvändefeedbackfrån potentiometern var snabbare och mer stabil än regulatorn som användeaccelerometern. Testen utomhus, på en ojämn yta, förstärkte skillnaderna mellanregulatorernaochvisadeattregulatornsomanvänderaccelerometervarsåinstabilattden knappt kunde få trehjulingen att luta alls medan regulatorn som använde sig avpotentiometern visade väldigt lika resultat som när den kördes inomhus. Det berortroligenpåaccelerometernskänslighetförvibrationer.Regulatorn som använde accelerometern var långsammare ochmer instabilmen kanhållafordonetvågrättpålutandemarkeftersomdenläsersannacceleration.Regulatornsomanvändeenberäknadvinkelochfeedbackfrånenpotentiometervarsnabbareochmer stabilmenkan intehålla fordonet vågrättpå lutandemark eftersomden inte tarhänsyntilldenegentligaaccelerationen.
Kandidatarbete MMKB 2016:23 MDAB 084
Leaning Dynamics on Three-wheelers
Robert Gröning
Gustav Sten
Godkänt
2016-06-07
Examinator
Martin Edin Grimheden
Handledare
Lars Svensson

IV

V
PREFACE This thesis project present the final assignment required for a bachelor’s degree from the engineering programs ”Mechanical engineering” and “Vehicle engineering” at the Royal Institute of Technology.
The authors would like to thank our supervisor Lars for inspiration and help with practical solutions regarding the controller design as well as for the feedback on our writing. We would also like to thank the whole institution for support in terms of equipment, materials and technical knowledge.
RobertGröning,GustavSten
Stockholm,May2016

VI

VII
CONTENTS
ABSTRACT............................................................................................................................................................I
SAMMANFATTNING.......................................................................................................................................III
PREFACE..............................................................................................................................................................V
CONTENTS.......................................................................................................................................................VII
NOMENCLATURE............................................................................................................................................IX
1 INTRODUCTION.......................................................................................................................................11.1 BACKGROUND....................................................................................................................................................11.2 PURPOSE.............................................................................................................................................................31.3 SCOPE..................................................................................................................................................................31.4 METHOD.............................................................................................................................................................4
2 THEORY......................................................................................................................................................52.1 LEANINGTHEORY.............................................................................................................................................52.2 PID‐CONTROLLER............................................................................................................................................7
3 DEMONSTRATOR....................................................................................................................................93.1 PROBLEMFORMULATION................................................................................................................................93.2 OVERVIEW..........................................................................................................................................................93.3 CONTROLLERS.................................................................................................................................................103.4 SOFTWARE.......................................................................................................................................................113.5 ELECTRONICS..................................................................................................................................................133.6 HARDWARE......................................................................................................................................................163.7 RESULTS...........................................................................................................................................................20
4 DISCUSSIONANDCONCLUSIONS....................................................................................................234.1 DISCUSSION......................................................................................................................................................234.2 CONCLUSIONS..................................................................................................................................................24
5 RECOMMENDATIONSANDFUTUREWORK................................................................................255.1 RECOMMENDATIONSANDFUTUREWORK.................................................................................................25
REFERENCES...................................................................................................................................................27

VIII

IX
NOMENCLATURE Denotationsandabbreviationsusedinthereportarelistedinthischapter.
Symbols
Symbol Description
r Wheelradius(m)
L Distancefromcenterofmasstocenterofwheels(m)
Fc Centripetalforce(N)
NL Normalforceactingonleftwheel(N)
NM Normalforceactingontherearwheel(N)
NH Normalforceactingonrightwheel(N)
m Mass(kg)
R Turningradius(m)
v Speed(m/s)
g Gravitationalacceleration(m/s2)
θ Leaningangle(degrees)
W Distancefromthefrontwheelpairtotherearwheel(m)
Steeringangle(degrees)
Abbreviations
CAD ComputerAidedDesign
RF RadioFrequency
IMU InertiaMeasurementUnit
PWM PulseWidthModulation

X

1
1 INTRODUCTION
1.1 Background In today’s vehicle industry there is a constant struggle making the vehicles as fuelefficient as possible. The goal of cutting down a vehicle’s fuel consumption can beachievedinmanydifferentwaysandthereisacontinuoussearchoffindingnewways.Car manufacturers are a big part in that search but also other investors such aspetroleum companies make their contribution to the field. For instance, Shell Eco‐Marathon (Shell 2016) is an annual competition, in which participants build specialvehiclestoachievehighestpossiblefuelefficiency.Afteracloserlookatthe“Prototypeclass”itissafetosaythatacommondenominatoristhatthosevehiclesoftenhavethreewheels and not four as a conventional car. In theory, there is no difference in rollingresistancebetweenathree‐wheeledvehicleandacorrespondingfour‐wheeledvehicle.Thereducedsourcesoffrictionduetothereductionofwheelsarecanceledoutbytheincreasedloadperaxel,shownbytherollingresistanceequation:
3 4 (1)WhereC isawheelandsurfacedependentconstantandN isthenormalforceperaxeland istherollingresistanceforce.Still,manyparticipantschoosetogowiththethreewheeledlayoutbecauseofotherfuelsaving reasons, partly because they can bemademore aerodynamicwith the desiredteardropshape(Figure1)andpartlybecauseofthereductionofangularinertiaduetothe spinningwheels.More of the available energy goes to propel the vehicle forwardsincelessenergyislosttothesesources.
Figure1AlérionSupermilage,winnerof2016ShellEco‐marathon,prototypegasolineclass.

2
Adownside to three‐wheelers is that theyareeasier to tipoversince the lever lengthbetweenthecenterofmassandthetippingaxesgetreduced(Figure2).
Figure2Redlinesrepresentlevers.Thinblacklinesrepresentthetippingaxesforthevehicle.Yellow/blackcirclerepresentthecenterofmass.Frontofthevehicleisupwardsinthepicture.
One way to deal with that problem could be get the three‐wheeler to behave like amotorcycle,whichleansintocornerstocanceloutthetorquecausedbythecentripetalforce.Thereareseveraldifferentwaystoachievethatgoalbut it iscommontouseanactive system that can figure out the desired angel of tilt and then execute the tiltingmotion. Toyota is currently developing a vehicle as such (Figure 3), called i‐ROAD(Toyota 2016). This vehicle is using a combination of speed, steering angle andgyroscopemeasurementstocalculateadesiredleaningangle.Thatdesiredleaningangleis thenusedasreference tocontinuouslycompensate the individualheightof the twofrontwheelswhichwillmakethevehiclelean.(Caranddriver,2013)
Figure3Toyotai‐ROAD

3
1.2 Purpose Thepurposeofthisprojectistotesttwodifferentcontrollerstrategiesforintroducingleaningdynamicstoavehicle.Todothistwocontrollersaregoingtobetested,onewilluse an accelerometer to find the point where there is no lateral acceleration on thesensor.Theotheronewillusethevehiclessteeringangleandcurrentspeedtocalculatean appropriate leaning angle and receive feedback from a potentiometer whichmeasuresthecurrentleaningangle.These twocontrollerswillbe compared ina controlledenvironment in termsof theirspeedandstabilitytoanswerthefollowingquestion.WhatistheperformancedifferencebetweenusingaPID‐controllerwithfeedbackfromanaccelerometer and using a PID‐controller with feedback from a leaning anglemeasurement,wherethedesiredangle iscalculatedbasedoncurrentspeedandsteeringangle?The reason why this is interesting to investigate is that the system with anaccelerometercouldbeeasiertoimplementsinceitrequireslessinformationaboutthesystem.Itshouldalsobemoreexactsinceitmeasurestheactualaccelerationthevehicleexperiences but there could be a problem with disturbances from other sources ofacceleration. The system that uses a calculated angle is on the other hand lesssusceptible todisturbancessince itssensoronlymeasuresthecurrentanglewhile theaccelerometermeasuresalllateralaccelerationthesensorissubjectedto.
1.3 Scope Thescopeforthisprojectistobuildasmallradio‐controlledthree‐wheelerwithcontrolof leaningdynamicsusingexistingelectrical componentsand3D‐printedparts for themechanicalconstruction.Tocontrolthisvehicleahandheldradio‐controllerwillalsobebuilt.Theworkthatwillbedoneisprogrammingandelectricaldesignofthecircuitsforboththe radio‐controller and the three‐wheeler. For the three‐wheeler mechanical designandconstructionhas tobedoneaswell as controldesign for the twocontrollers thatwillbeinvestigated.The three‐wheelerwill be20x40 cm,have amaximum leaning angleof20degrees inbothdirectionsandhaveamaximumsteeringangleat29degrees.Itwillalsoneedatopspeedataminimumof1,5m/sfortheleaningtonoticeablewhiledriving.Thecontrollerswillbetestedbyhavingthevehicletakeaturnatatargetspeedwithsetsteeringangle.Thistestwillbemadeonceindoorsonasmoothsurfaceandonceoutsideonaroughsurface,separatelyforeachcontroller.

4
1.4 Method This project started by designing and constructing themechanical part of the leaningsystem.ThesystemwasbuiltaroundaDC‐motorwhichcontrolstheleaning.Whentheleaningsystemwascompletethewheelsandsteeringwasadded.Thenthedesignandconstructionof themainbodyandpowertrain startedaswell as theelectricaldesign.During this period thedevelopmentof software and the constructionof thehandheldradio‐controllertookplace.When all of these activities were completed and the prototype was assembled thecontrollerdesignstartedforthetwoPIDcontrollers.While thecontrollerswerebeingdesignedtherewastimeforsmallimprovementstothethree‐wheelerandcontroller.After the controllersweredesigned and implementedon the three‐wheeler testing ofthecontrollersbegan.Theseconsistedofhavingthethree‐wheelertakealeftturnatasetsteeringanglewithatargetspeed,bothonasmoothsurfaceandonaroughsurface,for each controller. Data was collected during the turns and was compared to drawconclusionsaboutwhatthedifferencebetweenthetwocontrollersare.Thismethodwas useful since the vehicle had to be completed before the controllerscouldbetested.Themethodallowedforthecompletionofdrivingcontrol,radio‐controland steering control to be completed before the vehiclewas assembled. Thismade itpossibletoworkwiththeleaningcontrollersfull‐timeinthelaterstagesoftheproject.Anotherwaytocompletethesystemwouldbetodesign,modelandsimulatethethree‐wheelerbeforestartingconstructingthesystem.Thiscouldhavemadethevehiclemoreoptimizedbutcouldalsohavetakentoomuchtimeandresultinginanincompletethree‐wheeler.

5
2 THEORY
Thischapterpresentsthetheorybehindtheproject.
2.1 Leaning theory Themaintheorybehindthisprojectisthatleaningwhileturningimprovesstabilityanddriving characteristics.The reasonbehind this is that the torquearound the centerofmassbecomescounteractedbyotherforceswhenleaningdynamicsare introduced. Inthisanalysisonlylateralforcesareconsidered.
Figure4Freebodydiagramwithoutleaning,yellowandblackmarkrepresentsthecenterofmass.
DuringaturnthewheelsofthevehicleexperiencemultipleforcesasshownbyFigure4.Inthiscasefocusliesonthemajorones,thecentripetal forceandthenormalforce.Inthecaseofuprightwheelstheforcesthataffectthewheelresultinatorquearoundthewheel,whichhas to be counteractedwith thenormal forces at each side‐wheel.WithFc=FCL+FCM+FCRtheequationforthetorquebecomes:
∙ ∙ (2)
Thisshowsthatthenormalforceactingontherightwheelneedstobelargerthanthenormalforceontheleftwheel.Thismeansthatathighspeedsduringturnsthevehiclemaystarttippingoversincemoreandmoreofthenormal force is locatedattherightwheel. Eventually itwill reach a pointwhere it can’t counter the torque and it startstippingover.
Toavoidthis it ispossibleto introduceatiltwhichmakesthecenterofmassmovetooneside.Thiswillcreateatorquefromthenormalforcetocounteractthetorquefromthecentripetalforce,thetiltwillalsoreducethedistancefromthegroundtothecenterofmassresultinginlesstorquefromthecentripetalforce,makingiteasiertocounteractasshowninfigure2.

6
Figure5Freebodydiagramwithleaning,yellowandblackmarkrepresentsthecenterofmass
With an offset of θ (Figure 5) and withmg=NL+NM+NR the equation for the torquearoundthecenterofmassbecomes:
∙ ∙ ∙ (3)
If (3) isset tozeroand letNL=NRto find theangleatwhichthenormal force isevenlybalancedoutoneachwheel,thisequationisfound:
arctan (4)
Andwith whereRistheturningradiusandvisthespeed(4)becomes:
arctan (5)
Equation(4)showstheangleatthenormalforcesonbothfrontwheelsisequalduringaturn.Rcanbecalculatedwith:
(6)
WhereWisthedistancebetweenthefrontwheelpairandtherearwheelandisthecurrent steering angle. With this equation for R the equation for the leaning angledependingoncurrentsteeringangleandcurrentspeedbecomes:
arctan (7)

7
2.2 PID-controller PID‐controllers are the most common feedback controllers in the industry (Glad &Ljung,2014,20)whichusesameasurederrore(t)fromasetvaluetocalculateaninputsignalu(t)toasystemtocompensatefortheerror.TheequationforthePIDcontrollerisshowninequation(8).Wheree(t)=r(t)‐y(t),r(t)isthesetvalueandy(t)isthemeasuredvalue.
(8)
ByvaryingtheconstantsKP,KIandKDin(8)itispossibleforthecontrollertobetunedfordifferentsituations. Ingeneral increasingKP increases thespeedof thesystembutdecreases stability, increasing KI removes any steady state error and has a smallincrease in speed but decreases the systems stability. Increasing KD increases thesystems stability as long as the constant still is small enough, big values on KDcandestabilizethesystemifthereisdisturbancesinthemeasurementoftheerror(Glad&Ljung,2014,53).There are different ways of tuning the constants of a PID‐controller. Some of theseconsistsofcreatingamathematicalmodelof thesystemthat isgoingtobecontrolled.Butcreatingamodelofaphysicalsystemisdifficultsinceitishardtotakeallexternalfactorsactingonthesystemintoaccount.Tosavetimethereareexperimentalwaystotunecontrollersbytestingsomevaluesfortheconstantsandthentunethesesconstantsbyhand.OnesystematicalmethodforthatkindoftuningistheZiegler‐NicholsMethod(Glad&Ljung,2014,57).Ziegler‐NicholsMethodThe Ziegler‐Nichols method is a method for tuning a PID‐controller without amathematicalmodel for the system that is going to be controlled. Themethod startswithsettingKIandKDtozeroandthenincreasingKPuntiltheoutputfromthecontrollerstarts to oscillate. The KPvalue at which the output oscillates is saved as KUand theoscillationperiod is savedasTU.KP,KIandKD is thencalculatedbyusingTU andKUasdescribedinTable1.Table1EquationsfortheconstantsinaPID‐controllerwhiletuningwiththeZiegler‐Nicholsmethod
(Glad&Ljung,2014,57).
KP KI KD
0,6KU 2KP/ TU KPTU /8
Thismethoddoesn’talwayscreateaperfectcontrollerbut itprovidesastartingpointforsomefinalfine‐tuningofthecontroller.

8

9
3 DEMONSTRATOR
This chapter describes the problem formulation, the final prototype, the electricalcomponents and the hardware used to build the three‐wheeler, how the hardware isassembledandthelogicforthewrittencode.
3.1 Problem formulation Asmall remotecontrolled three‐wheelerneeds tobeconstructed inawayso that thevehicle isableto leanwhileturning.Thismeansthattherehastobeenoughspaceforthemovingparts.Thethree‐wheeleralsohastodriveatappropriatespeedtoachieveahighenoughcentripetalforcetocompensatefor.
3.2 Overview The three‐wheeler was constructed using 3D‐printed parts and existing electricalcomponents.Figure6showsthecompletedvehicle.
Figure6Thecompletedthree‐wheeler.
In the front there are two servos controlling the steering for eachwheel. The leaningsystemiscontrolledbyaDC‐motorandthesystemisconnectedtoapotentiometerthatmeasuresthecurrentleaningangle.Belowtheleaningsystemthereisanaccelerometerthat measures the sideways lateral acceleration of the vehicle. The power source islocatedinsideofthemainbodywithaplateholdingtheelectronicsontopof it. Inthefront of the plate connectors from external sources such as servos DC‐motors andsensors are connected to the circuit on the plate. Behind these connectors amicrocontrollerislocatedthatcontrolsthevehicle.Behindthemicrocontrollerthereis

10
anH‐BridgeforcontroloftheDC‐motorsforleaninganddriving.InthebackoftheplateaRF‐receiverislocatedforthecommunicationwiththehandheldradio‐controller.ThepowertrainislocatedbehindtheplatewithaDC‐motorandadrivebeltconnectingthemotortotherearwheel.TothesideoftherearwheelthereisaHallEffectsensorthatdetects a magnet on the rear wheel and sends a pulse when this magnet passes thesensor.
3.3 Controllers Two controllers were designed for the three‐wheeler using different strategies. Bothwere tuned by simulating a turn for the controller in question and analyzing theresponse from the system. The constants for the controllers were modified by anempirical process using knowledge about their effect on the system and testing thecontrollers’responseaftereachmodification.This empirical process was deemed preferable to modeling the system since themechanical leaning system is complex and it would be difficult to create an accuratemodelforit.ControllerAThefirstcontrollerusedinthisprojectusesanaccelerometerforfeedbackandwiththisinformation it triesto leanthesystemto findthepointwherethere isnoaccelerationacting sideways on the sensor. The sensor is fixed below the leaning systemandwillleanatthesameangleasthethree‐wheeler.Inthiswaylittleinformationaboutthestateofthevehicleisneededsinceonlythemeasuredaccelerationisused.ControllerAwastunedbyhavingthevehiclestationaryandthentiltingthegroundatwhichthethree‐wheelerwasstandingontosimulateaturn.ControllerBThe second controller uses the three‐wheelers current speed and steering angle tocalculate the angle at which the normal force on both front wheels are equal. Thecontrollerusesapotentiometerthatmeasuresthevehiclescurrentangleasfeedbacktoreach the calculated angle. This way of controlling the leaning dynamic needs moreinformationaboutthestateofthesystemsinceitdependsonthecurrentspeed,steeringangleandleaningangle.Controller Bwas tuned by elevating the rearwheel into the air and letting the drivemotorrunataconstantspeedthenaturnwassimulatedbyturningthefrontwheels.

11
3.4 Software Thesoftwarewrittenforthethree‐wheelerandtheradiocontrollerisdescribedFigure7and8.
Figure7Flowchartforthesoftwareforthecontrolofthethree‐wheeler
Mostofthesoftwaredevelopedforthisprojectiscontainedonthethree‐wheelersincethat is themainpartof thisproject.Theprogramcontrols thetwoDC‐motorsandthetwoservos.Itreceivesinputfromtheaccelerometer,thepotentiometer,theHallEffectsensorandtheRF‐Receiver.First the program is initiated then it starts the continuous loop where it starts bycalculatingthevehiclescurrentspeedifarotationoftherearwheelhasbeendetected.Thisdetection ishandledbyaHallEffectsensor locatednext to therearwheel.Whenthe magnet on the rear wheel is detected the main program is interrupted and the

12
program remembers that a full rotation of the rear wheel has happened. After thecalculation of speed is done the program continues by reading values from theaccelerometerandthepotentiometer.ThesevaluesarethenusedwithaPID‐controllertosendaPWMsignalamplifiedbytheH‐bridgetotheDC‐motorcontrollingtheleaningof thevehicle.ThisPWMsignal combinedwith informationofwhichdirection to leangivesthemotorthevoltageandpolarityneededtoturnintherightdirection.Whenthesignalhasbeensentthevalueisstoredtobeusedinfutureoperations.Aftertheleaningcontroliscompletetheprogrammovesonandwaitsforatransmissionfromtheradiocontroller.ThistransmissioncontainsavectorwhichhasthePWM‐signaltothedrive‐motorandthesteeringsignalfortheservos.ThesignalissplitupandfirstthePWM‐signalissenttotheH‐bridgewithinformationofthepolarityneededtoeithergo forward or backward. Then the steering signal is handled and adapted to try tooptimize the steering. This is done by sending different values to each servo whichmakesitpossibletohandlephysicaldifferencesontheservos.Whenthesteeringangleandthedrivespeedhavebeensettheprogramloopstartsover.
Figure8Flowchartforthesoftwarecontainedontheradio‐controller
Thesoftwareontheradio‐controllerisnotasadvancedastheoneonthethree‐wheelerbut some of the operations regarding steering and drive motor control has beenallocated to the controller to minimize the amount of logic on the three‐wheelersoftware. The program receives inputs from two joysticks. One is used for steeringcontrolandoneformotorcontrol.TheprogramthenoutputsamessagethroughtheRF‐Transmitter.

13
FirsttheprogramisinitiatedthenitreceivesanalogvaluesfromthejoystickswhicharethentransformedtointegersintherangeofaPWMsignalandaservosignal,thesetwovaluesarethenmerged intoa largervector.Thevector is thensent to thetransmitterandtheprogramloopstartsover.TohandletheRF‐communication,betweenthehandheldradio‐controllerandthethree‐wheeler,theprogramminglibraryRadioHead(RadioHead)wasused.
3.5 Electronics The schematics for the electronic components on the three‐wheeler and the radio‐controller are described below. Blue lines are 5V, green lines are 3.3V, red lines arePWM signals and yellow lines represents the voltage from the power supply on thevehicleorradio‐controller.Thecomponentsaredescribedmoreextensively insection3.6.
Figure9Schematicsfortheelectroniccomponentsonthethree‐wheeler
Mostof theelectric componentsareon the three‐wheelerwith themicrocontrollerasthecenterpiececonnectedtothe12Vpowersupply.ThewiresthatweregoingtosendPWMsignalstotheservosandtheH‐BridgeneededtobeconnectedtothePWMportsonthemicrocontroller.The accelerometer is connected to the 4th and 5th analog pins from its SCL and SDAconnectors since thosepinsaremade tobe able tohandle thosekindsof signals.Thepotentiometerneedstobeconnectedtoananalogpin.Inthiscaseitwasconnectedto

14
the 1st analog pin to separate wires that are connected to different sources. Thepotentiometer doesn’t need any sizable voltage, 5V were taken straight from theArduino.ThenextmajorpartusedistheH‐BridgewhichcontrolsthetwoDC‐Motorsandprovidevoltagetotheservos.ThereasoningbehindtakingthevoltagefortheservosfromtheH‐BridgewasthatitallowsforahighercurrentthantheArduino,thisgivessomeelectricalinsulation by keeping the variating currents away from the Arduino. The connectorsfrom theArduino to theH‐Bridge are bundled together tomake it easier to seewhateverythingdoes.ThePWMforthedrivemotorisconnectedbetweenthe5thdigitalportandtheENBconnectorontheH‐Bridge.Therearealsowiresfromthe3rdand4thdigitalpin to the IN3and IN4 connectoron theH‐Bridge,whichgives informationabout thepolarityforthemotor,makingitispossibletodecidewhichwaythemotorwillrunbysetting either the 4th or 5th digital pin to a logical high and setting the other pin to alogicallow.Wires to the lean‐motor are connected in the same way but the PWM is connectedbetween the 6th digital pin and the ENA connector on the H‐Bridge and the polaritywiresareconnectedfromthe8thand7thdigitalspinsandIN1andIN2connectorsontheH‐Bridge.BoththeH‐BridgeandtheArduinoisconnectedtoa12Vpowersupply.The servos are connected to the H‐Bridge for their voltage. They get their signalsthroughconnectorsfromthe9thand10thdigitalpinsontheArduino.Thereceivergets itsvoltagestraight fromtheArduinoand isconnected fromitsDataconnectortothe11thpinontheArduino.Thereasonforthechoiceofpinisthatthe11thpinisstandardforthesekindsofreceiversintheprogramminglibraryusedforhandlingtheRF‐signals.TheHallEffect sensor is connected to the2nddigitalpinandgets itsvoltage from theArduino.

15
Figure10Schematicsfortheelectroniccomponentsintheradio‐controller.
The radio‐controller has fewer electric components and thus a simpler schematic. Amicrocontrollerconnects to two joysticks fromanalogpinson theArduino to theVRxand VRy connectors on the joysticks. These connectors send information the currentpositionofthe joystick. In thiscaseonlyoneconnection fromoneof theVRxandVRyconnectorsoneachofthejoysticksisneededsinceeachjoystickonlyisusedtocontroleither steering or speed. The voltage for both joysticks is taken straight from theArduino.Thetransmittergetsitsvoltagefromthepowersupply,thischoicewasmadeduetothesignalstrengthincreasewithhighervoltage.TheconnectionfromthetransmittertotheArduinogoesfromtheDatapinonthetransmittertothe12thdigitalpin.Thereasoningbehindthisissimplicitywhilewritingthesoftware,sincetheprogramminglibraryusedfortheRFtransmissionhasthatpinasstandardforthetransmitter.

16
3.6 Hardware The mechanical construction was a big part of this project due to the compact andcomplex design. Almost all constructional components were 3D‐printed except forwheels, motors, nuts and bolts. Wheels were taken from inline roller‐skates with itsbenefits of good bearings and grip, evenwhen tilted. Most bolts were cut to desiredlengthfromthreadedrods.BasicBodyDesign
Figure11PicturetakenfromthelefthandsideinSolidEdgest7.
The main body (Figure 11) consists of a front end (red/orange) with two wheelsattachedto it,batterypackhousing(blue) thatalsoactas theconnectionbetweenthefrontandrearend,arearendfiguringasaswingarm(black)withtheonerearwheelattached.PowertrainThevehicleispropelledbya240wattselectricalDC‐motor(gray)mountedintheswingarm.Themotorisconnectedtotherearwheelbyadrivebeltwitha3:4gearing.

17
LeaningprocessThefrontendleaningsystemisdescribedinfigure(12).
Figure12PicturetakenatthefrontinSolidEdgest7.
Thecrescentarm(orange)isattachedtotheturningmotoraxisandpushesandpullsonthestruts(purple/gray)thatinitsturnadjusttheangleofthewishbones(red).Duetothegravitationalforcethewheels(black)willremainincontactwiththegroundsurfaceandthemainbodywithwheelsincludedwilllean.SteeringThe steeringmechanism (Figure 12) consists of two servos (light blue), one for eachfront wheel, that are connected to the spindles (green) by pushrods (yellow). Thespindles has an Ackermann geometry to them but the individual servo configurationgives the vehicle even further possibilities to adjust the steering angle separately foreachwheel.Forexample,thesteeringangleisaffectedbytheleaninganglebecauseofstiffpushrodsandservoplacementandthatcanbeaccountedforandcompensatedbyindividuallycontrolledservos.MicrocontrollersThemicrocontrollerboardsusedforboththeradiocontrollerandthethree‐wheeleraretheArduinoUnoR3whichisbasedonthemicrocontrollerATmega328(Arduino).Theboardsarefrequentlyusedforsmallprojectsandarecheapandeasytouse. Ithas14digitalinput/output‐pinsand6analoginput‐pins.TheArduinoboardoperatesat5Vbutneed to be fed aminimum of 7V to run. In this project the boards are fed 9V in thecontrollerand12Vonthethree‐wheeler, therecommendedfeedvoltage is7‐12V.Theflashmemoryis32kBandtheclockspeedis16MHztheboardsalsohave1kBEEPROMmemoryinwhichit’spossibletosavedatawhiletheboardisturnedoff.

18
H‐bridgeInthisprojectaL298DualH‐BridgeMotorControllerisusedtocontrolthevoltageovertheDCmotors.TheboardisbasedontheL298H‐bridgewhichcancontrolthevoltageto two DC motors. The main reason to use this component is because it’s easy toimplement and small in size. It also has a 5V out which can be used to connectcomponents that might need a current that is higher than other sources can supply.Table1showssomeofthespecificationsfromthedatasheet(L298).
Table2InformationabouttheH‐Bridge
Chip L298N Logical voltage 5V Drive voltage 5V-35V Logical current 0-36mA Drive current 2A(Maximum) Max power 25W Dimensions 43mm x 43mm x 26mm Weight 26g
AccelerometerThe IMU that has been used for this project is the ADXL345 which contains anaccelerometerwith3DOF.Theaccelerometerisusedtofindtheangleoftheforcethataffectsthethree‐wheeler,inthiscaseitistheresultingforceofthenormalforceandthecentripetalforce.Theaccelerometerconsistsof twoplatesseparatedbysprings,one fixedandoneonlyattached to the springs, which provide resistance against forces due to appliedacceleration. The deflection of the structure ismeasured using differential capacitorsthat consist of independently fixed plates and plates attached to the moving mass.Accelerationdeflectstheproofmassandunbalancesthedifferentialcapacitor,resultinginasensoroutputwhichamplitudeisproportionaltotheacceleration(ADXL345).PotentiometerApanelpotentiometerwasused todetermine theangle inwhich the three‐wheeler iscurrently leaning. The potentiometer used has a linear carbon track, an internalresistanceofupto1kohm,amaximumpowerof0,25Wand300degreesofrotation.ServosForthesteeringinthisprojecttheSG909gMicroServoswereusedduetotheirsmallsize. The servo positions are controlled by a PWM signal where 1ms pulse sets thepositiontothefarleftanda2mspulsesetsthepositiontothefarright.Thepositionsin‐between are proportional linear. Table 2 shows some of the specifications from thedatasheet(TowerPro).
Table3Informationabouttheservos
Weight 9g
Dimension 22.2mm x 11.8mm x 31mm Stall torque 1.8NM*10^(-2) Operating speed 0.1s/60 degree Operating voltage 4.8V(~5V)

19
DriveMotorThedrivemotorusedforthisproject isaGR42x40byDunkermotoren.Table3showsthesomeofthemotorspecificationsfromthedatasheet(Dunkermotoren).
Table4Informationaboutthedrivemotor
No load speed 3800rpm No load current 0.18A Rotor inertia 110gcm^2 Weight 490grams
Tobeable to investigatehow the introductionof leaningdynamicsaffects the systemthe speedmust be high since the centripetal force needs to effect the three‐wheelerenoughtomakeleaningnecessary.Thisiswhysuchastrongmotorwaschosenfortheproject. There are smaller motors that could achieve the needed speed but in theinterestoftimeandavailabilitytheGR42x40waschosen.Receiver‐TransmitterPairForcommunicationaradiofrequencyreceiver‐transmitterpairthatoperatesat433MHzwas used. The transmitter can take a voltage input in between 3V and 12V, in thisprojectitreceivesaninputof9Vtoincreasethestrengthofthesignal.Thereceivercantakeaninputof3.3Vto6V,inthisprojectitisfedaninputvoltageof5VstraightfromtheArduino.JoysticksThejoysticksusedconsistoftwopotentiometers.Eachgivesavaluethatdescribesthedisplacementfromthefarpositiontooneside. Inthisprojectonlyoneaxis isusedoneach joystick which means that these components could be replaced with singlepotentiometerjoysticks.Thejoysticksoperateat5V.HallEffectSensorAHallEffectsensorisasensorthatrespondstomagneticfields.Whenthesensorisinamagnetic field the electrons flowing throughwillmove to one sideof the sensor.Thesensorwillthenhaveonepositivelychargedsideandonenegativelychargedsideandcreateavoltage.Inthisprojectthesensorisusedtodetectamagnetthat isplacedonthe rear wheel. This combined with the clock in the Arduino were used to find thevehiclescurrentspeed.TheHallEffectsensorisfed5V.

20
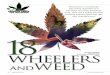
3.7 Results The testing resulted in eight graphs, four for each control system.These are showingboth the systems’ reference values and also the actual real time values. The vehicle’sspeedandsteeringangleisshownforeachtest.Thismakesiteasiertoseewhenaturnstartsandtomakesurethatthespeedisneartoconstantduringtheseturns.
Figure13GraphsfromtheindoortestforControllerA
Figure 13 shows the collected data from the test indoors with Controller A. The topgraph describes how the measured lateral acceleration (Red) varies over time. ThedesiredaccelerationisalwayszeroforControllerA.Thebottomgraphshowshowthesteeringangle(Lightblue)andspeed(Yellow)variedduringthetest.
Figure14GraphsfromtheindoortestforControllerB
Figure 14 shows the data from the indoor test with Controller B. The top graphdescribes how the calculated desired angle changes over time (Red) and how thecurrentleaninganglewaschanginginresponse(Blue).Thevehicle’sspeed(Yellow)andsteeringangle(Lightblue)isprovidedinthebottomgraph.

21
Figure15GraphsfromtheoutdoortestforControllerA
Figure15showsthedatafromtheoutdoortestforControllerA. Thetopgraphshowsthe measured lateral acceleration (Red) and also the reference value for the desiredacceleration(Blue).Thegraphdescribingthemeasuredaccelerationshowstherewerealot of disturbances acting on the accelerometer during this test. These disturbancesmade the acceleration difficult to compensate for. The bottom graph shows how thesteeringangle(Lightblue)andspeed(Yellow)variedovertime.
Figure16GraphsfromtheoutdoortestforControllerB
Figure16describes thedata collected from theoutdoor test forControllerB.The topgraphshowshowthedesiredleaningangle(Red)changesovertimeandalsohowthecurrent leaning angle of the vehicle (Blue) changes accordingly. The bottom graphshows how the current speed of the vehicle (Yellow) and its current steering angle(Lightblue)changesovertime.

22

23
4 DISCUSSION AND CONCLUSIONS
Inthischaptertheresultsfromsection3.7arediscussedandsummarized.
4.1 Discussion Overall the results turned out as expected.While driving outside on relatively roughsurface (asphalt) the accelerometer values mainly consisted of disturbance due tovibration(Figure15).Itisevendifficulttoseeanytraceofstepresponseinthatgraph.For comparison, the graph for lateral acceleration in (Figure 13) shows that whendrivingindoorsonasmoothsurface(linoleumcarpet)muchsmallerdisturbancesweredetectedandevenadistinctstepresponsewasvisible.Fortunatelythesedisturbanceshave such a high frequency that the mechanical inertia of the three‐wheeler is highenoughtodampthesystemfairlysufficiently,bothindoorsandoutdoors.Whendrivingoutdoorsthough,itdidn’tleanasmuchasexpected.Onereasoncouldbethatwiththedisturbancebeingthegreaterpartofthesignaltheactualwantedsignalbecomessmallincomparison,evenifit’sthere.
ThegraphthatdescribestakingaturnwithControllerBoutdoors(Figure16)shows,asopposed to theplotsofControllerA,verystableandwelldefinedreferencevalues. Adistinct step for the referencevalue isvisibleandso is the response fromthesystem.Theresultfromthistestisverysimilartotheresultfromthetestexecutedindoorswiththe same controller (Figure 14). This is because these input signals in this controlsystem (Controller B) are not influenced by the surrounding conditions in the samemannerasControllerA.
Inrealitywhiledrivingthevehicle,itisclearthatControllerBismuchfasterandmoreresponsivethanControllerA.Thatisprobablybecausethatthissystemcanmanagetostay stable for greater gain in the PID and also because that the steering angleinformation is sent to the controller at the same time as it is sent to the servos thatsteersthewheels.Thisresultsinthattheleaningmotorstartstoaimforaleaningangleevenbeforetheservoshavereachedthecorrespondingsteeringangle.
OnedrawbacktoControllerBisthatitdoesn’taccountforsurroundingconditions.Evenifthatisagoodthinginthemanneroflowdisturbancesitalsomissessomeinformation,the system has no information about the coordinate system of the surroundings.Basically,itwon’tcompensateforleaningroadsurfaces.

24
4.2 Conclusions What is theperformancedifferencebetweenusingPID‐controllerwith feedback fromanaccelerometer and using a PID‐controller depending on the current speed and steeringangletocontrolleaningdynamicsonavehicle?
Bothsystemshavetheiradvantagesanddisadvantages.ControllerAismorecompatiblewithexistingvehicleconstructionssinceitbasicallydoesn’tneedanyinformationaboutthevehicleitself.It isself‐compensating.Ithasalsothecapabilityof lettingthevehiclerunperfectlyleveledoveraleaningsurface.Thedisadvantagesofthatsystemisthatitpicksupalotofdisturbanceandthatitisslowcomparedtoitsopponent.
Controller B has the advantages of speed, responsiveness and continuality on allsurfaces and surroundings. The disadvantages are that it won’t compensate for roadsurfaceconditionsandthatitrequiresmoreinformationaboutthevehicletomakethecalculationforthedesiredleaningangle.

25
5 RECOMMENDATIONS AND FUTURE WORK
Thischapterpresentsrecommendationsforimprovedresultsandforfuturework.
5.1 Recommendations and Future Work In this project the main reason for the differences in performance between the twocontrollerswere causedbydisturbances actingon the accelerometer.Ways to reducethe amount of disturbances is by filtering the signal from the sensor and adding avibrationabsorptivemountingfortheaccelerometer.Thiswouldresultinamoreevenreferencesignalforthecontrolandamorestablesystem.
The twocontrollers couldalsobe combined tokeep thebenefitsof theaccelerometerwhile driving on a crooked surface and keep the speed and stability of the controllerdepending on a calculated angle. This could be done by having the controller withfeedbackfromtheaccelerometermakeabiggerimpactonthefullsystemwhiledrivingat lowerspeedandhaving thecontrollerrelyingonacalculatedangle takeovermoreandmoreasthevehiclesspeedincreases.
Anothercontrollerstrategyforthesystemisusingagyroscopeforthemeasurementofthe vehicles current leaning angle and calculating the angle needed to counteract thetorque around the center of mass. This would keep the vehicle leveled on crookedsurfacesandmakethevehicleleanintocorners.
Otherimprovementsthatcouldbemadetothedemonstratorisincreasingtheamountofmagnetsontherearwheeloruseanopticalsensorwithaperforateddisctoincreasethe update frequency of the calculated speed. This would allow the system tocompensateforchangesinspeedmorequicklywhiledriving.

26

27
REFERENCES
Shell,2016,”ShellEcoMarathon”,http://www.shell.com/energy‐and‐innovation/shell‐ecomarathon.html,2016‐05‐08
Toyota,2016,“Toyotai‐ROAD”,http://www.toyotaglobal.com/innovation/personal_mobility/i‐road/,2016‐05‐08
Caranddriver2016,”Toyotai‐ROAD”,http://www.caranddriver.com/news/toyota‐i‐road‐concept‐for‐2013‐geneva‐auto‐show‐news,2016‐05‐08
Glad&Ljung,2014,“Reglerteknik,Grundläggandeteori”,Studentlitteratur,Lund,2014
RadioHead,”RadioHeadPacketRadiolibraryforembeddedmicroprocessors”,http://www.airspayce.com/mikem/arduino/RadioHead/,2015‐08‐05
Arduino,“ArduinoUno”,https://www.arduino.cc/en/main/arduinoBoardUno,2016‐05‐08
L298,“L298DualH‐BridgeMotorController”,http://www.instructables.com/id/Arduino‐Modules‐L298N‐Dual‐H‐Bridge‐Motor‐Controll/,2016‐05‐08
ADXL345,“DigitalaccelerometerADXL345”,http://www.analog.com/media/en/technical‐documentation/data‐sheets/ADXL345.pdf,2016‐05‐08
TowerPro,“SG909gMicroServo”,http://www.micropik.com/PDF/SG90Servo.pdf,2016‐05‐08
Dunkermotoren,“DunkermotorenGR42x40”,http://www.dunkermotor.com/data/technical_data/motors/pdf/121005_GR42x40.pdf#page=1,2016‐05‐08


29
TRITA MMKB 2016:23 MDAB084
www.kth.se



![BEYOND NAGPUR: THE PROMISE OF ELECTRIC MOBILITY NAGPUR[5].pdfis the case of electric two-wheelers (2W) and three-wheelers (3W). This would also make fleet operators less dependent](https://img.pdfslide.us/doc/110x75/5e9d3f1b894f414c3c609027/beyond-nagpur-the-promise-of-electric-mobility-nagpur5pdf-is-the-case-of-electric.jpg)