Embed Size (px)
Citation preview
Prof. M. Kuna
Continuum Mechanics
Lecture Notes
Mit 23 Abbildungen und 3 Tabellen
Übersetzt: April 1, 2014, 13:40
TU Bergakademie Freiberg · Chair of Solid Mechanics

Figure 2.1: 1st order tensors in index notation.
V
�
2x
1x
2V
2e�
1e�
1V
2x
2V
2e�
1e� 1
V1
x
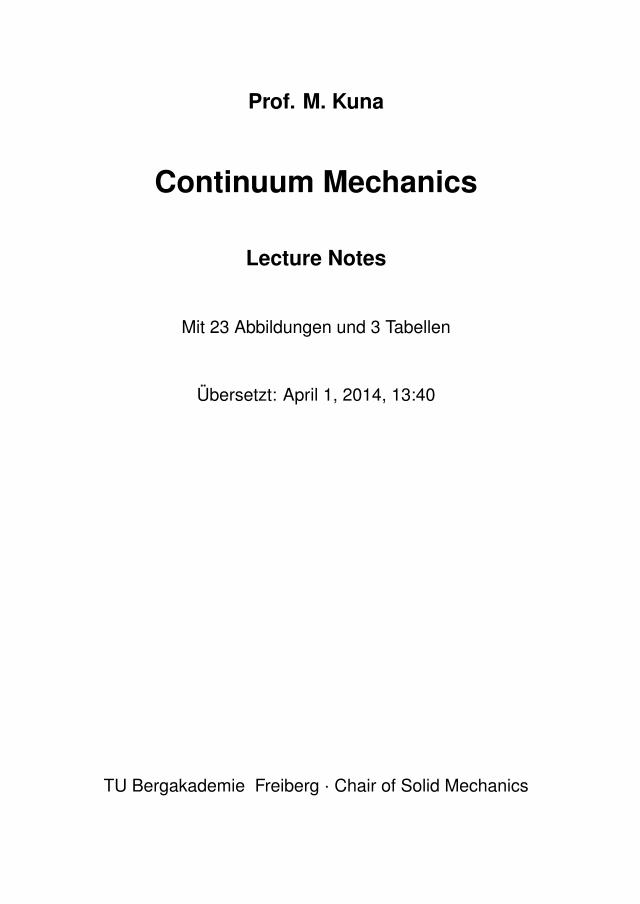
Figure 2.2: Change of basis.
33D
32D
31D
23D
22D
21D
13D
12D
11D
IIID
ID
IID
1e�
2e�
3e�
Ie�
IIe�
IIIe�
jQ
α
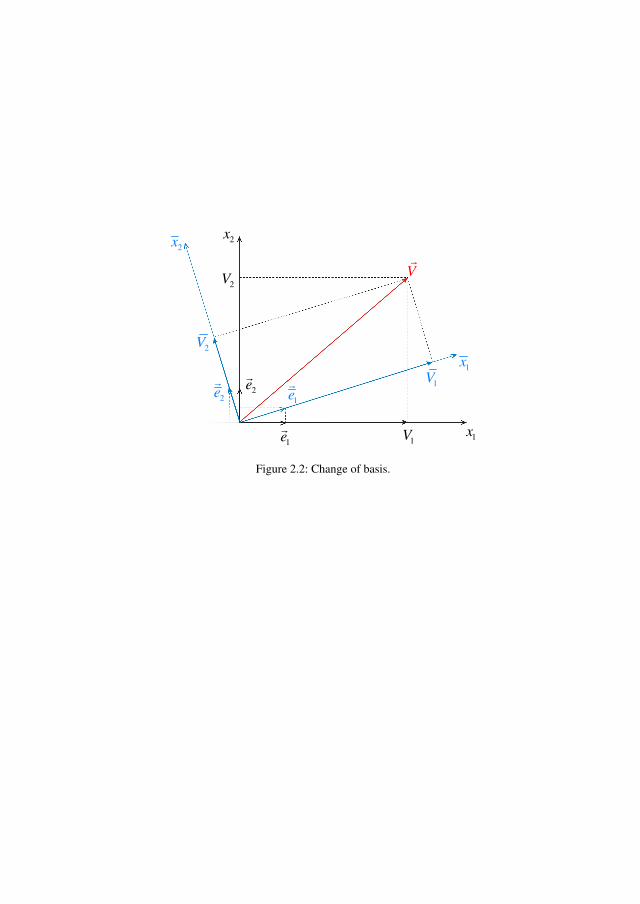
Figure 2.3: Principal coordinate system and principal values.
IIIe�
Ie�
IIe�
III
1
D
II
1
D
I
1
D
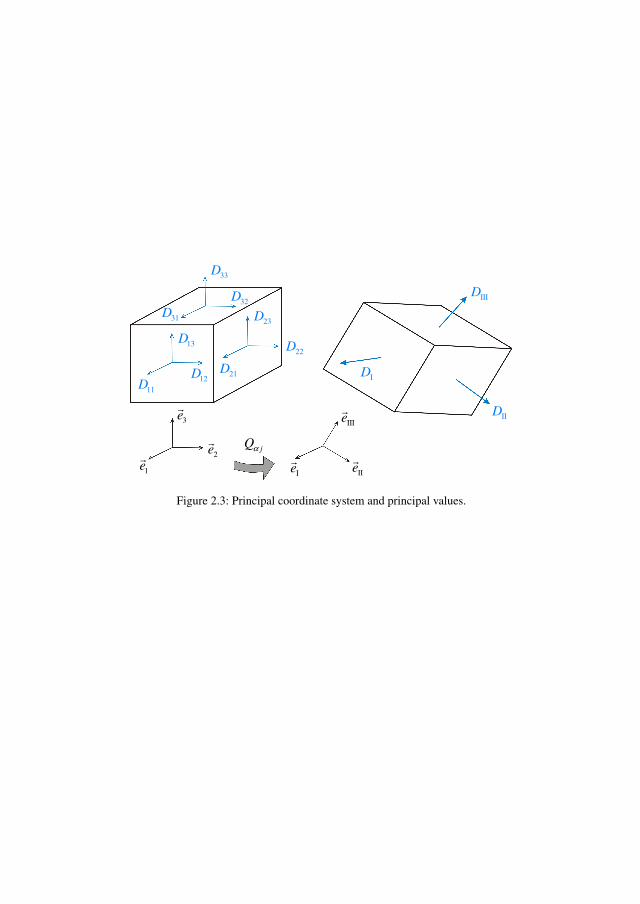
Figure 2.4: Ellipsoid of a tensor
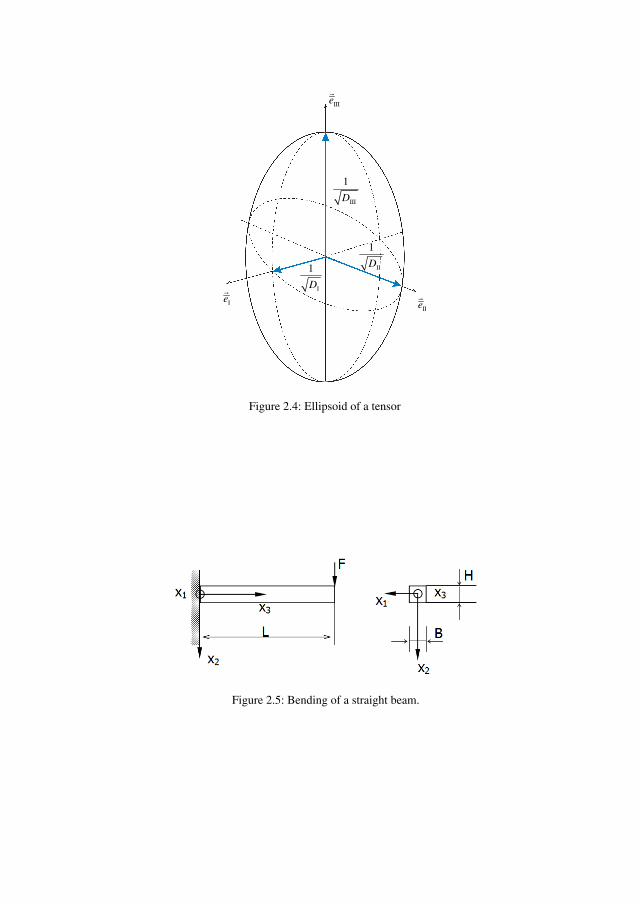
Figure 2.5: Bending of a straight beam.
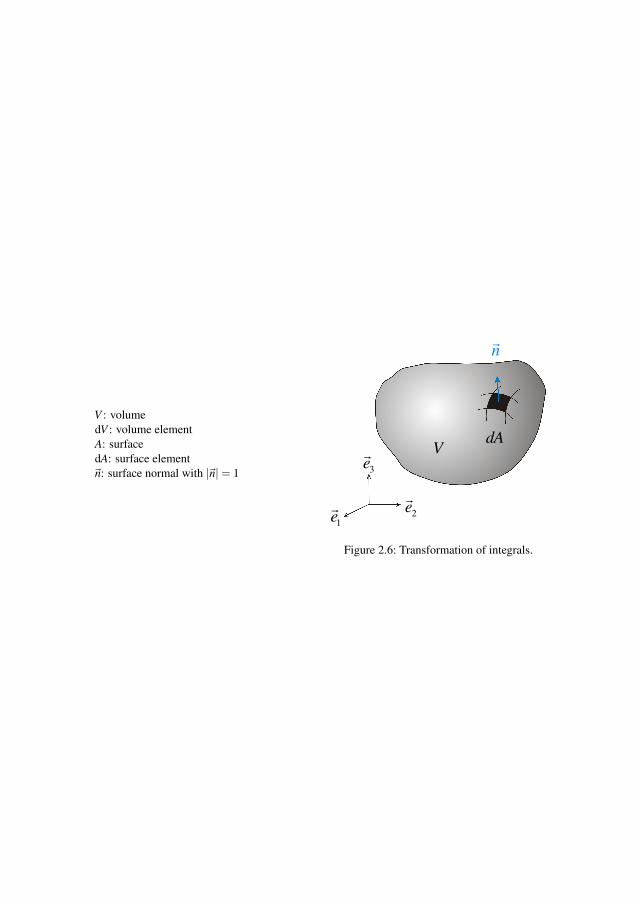
V : volumedV : volume elementA: surfacedA: surface element~n: surface normal with |~n|= 1
2e�
3e�
1e�
dAV
n�
Figure 2.6: Transformation of integrals.

1e�
2e�
3e�
x�
X
�
P
P’
( ),x X tϕ=
���
u�
reference configuration t = 0 current configuration t > 0
V
A
v
a
Figure 3.1: Motion of the material body.

Figure 3.2: Difference between the LAGRANGian and the EULERian descriptions.
1e�
2e�
3e�
( ),x = X tϕ
�
��
X
�
P
P’
Q’
Q u du+� �
u� dx
�
d X
�
reference configuration t = 0 current configuration t > 0
V
A
v
a
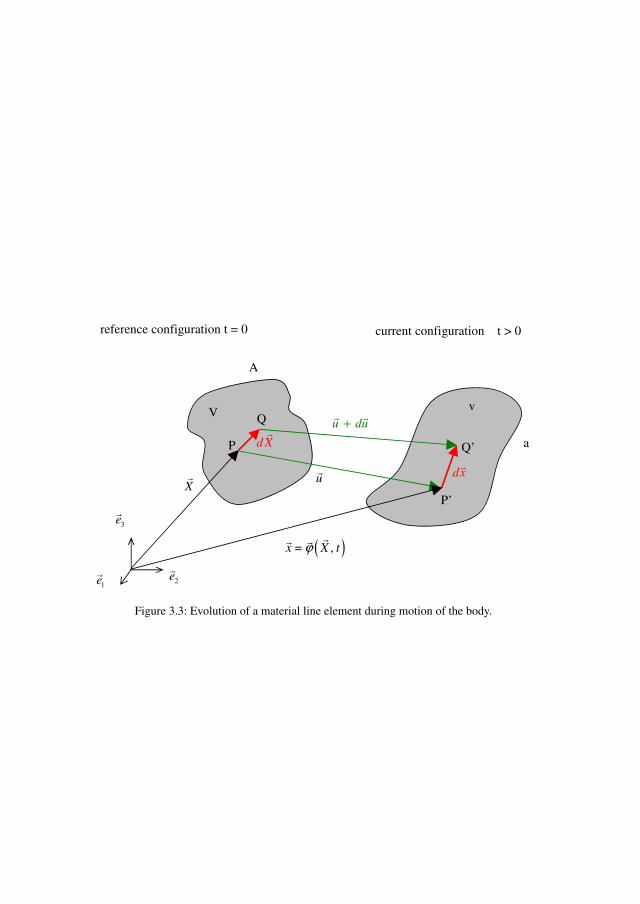
Figure 3.3: Evolution of a material line element during motion of the body.

reference configuration
stretch U
rotation R
current configuration
stretch V
rotation R
dX
dx
Figure 3.4: Graphical illustration of polar decomposition

PP′
dL
dl
N
�
Figure 3.5: Illustration of local deformation with strain ellipsoid

2
d L
1
d LP
2
N
�
1
N
�
2
n�
1
n�
P′ 1
d l
2
d lγ
α
Figure 3.6: Illustration of shear strains.

2e�
1e�
3e�
x�
dx�
′P
( ) constX P =
�
( )v x� � ( ) constX Q =
�
′Q ( )dv x x+� � �
Figure 3.7: Velocity field in the current configuration.
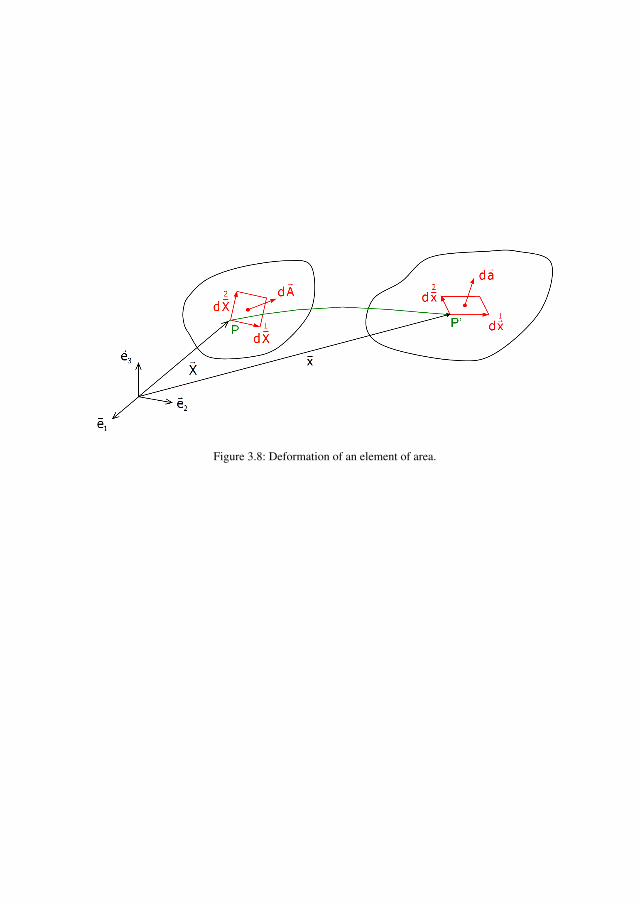
Figure 3.8: Deformation of an element of area.

d ,s t
d ,s b
dv
da
Figure 4.1: Definition of body and surface forces.
ds�
da
da
Pn�
n�
t�
3e�
1e�
2e�
x�
τ
σ
-ds�
Figure 4.2: Stress vector~t at the section area da with normal~n.

2x1
x
3x
31σ 32
σ
33σ
13σ
11σ
12σ
23σ
21σ
22σ
3t�
1t�
2t�
Figure 4.3: Illustration of the stress tensor.
2e�
1e�
e�
3
t�
t�
1
3t�
da
n�
da3
da2
da1
2t�
22σ
21σ
23σ
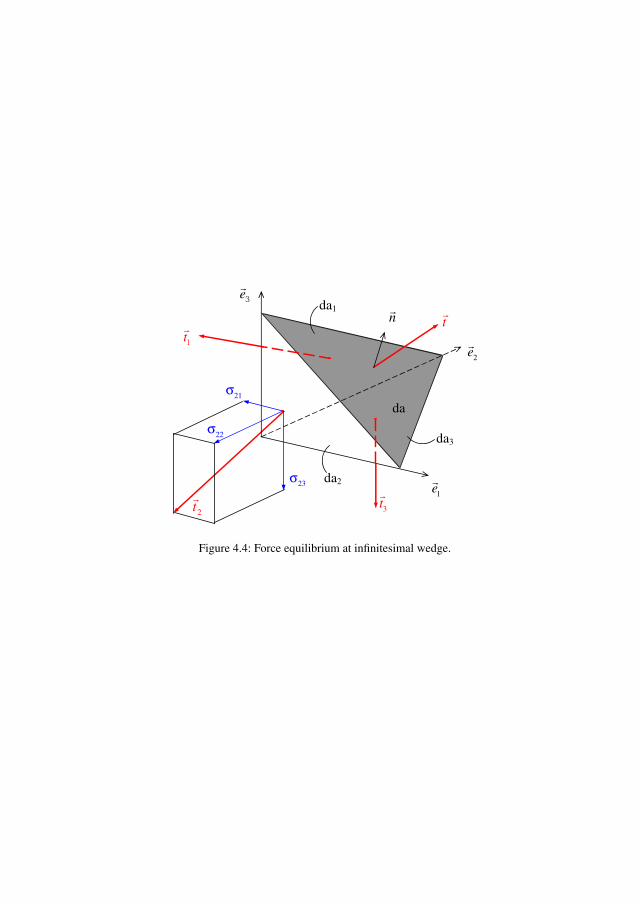
Figure 4.4: Force equilibrium at infinitesimal wedge.
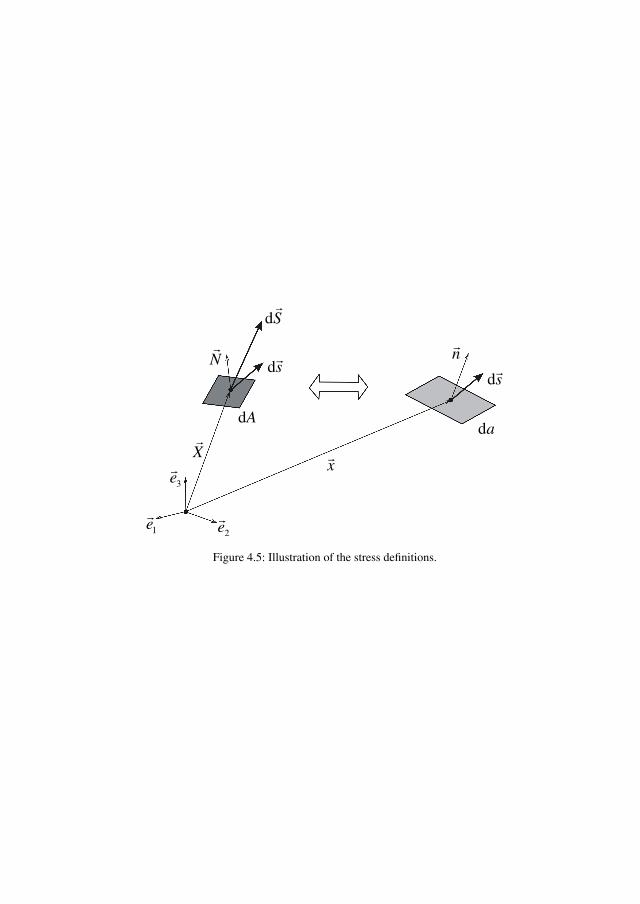
X
�
N
�
dS
�
ds�
dA
x�
n�
ds�
da
3e�
1e�
2e�
Figure 4.5: Illustration of the stress definitions.

n�
( )n
α
�
1e�
2e�
3e�
1e�
2e�
3e�
t�
( ) ( )t n
α ασ=
��
ijσ
I,II,IIIσ
Figure 4.6: Definition of the principal stresses.
1e�
2e�
3e�
3e
�ɶ
2e
�ɶ
1e
�ɶ
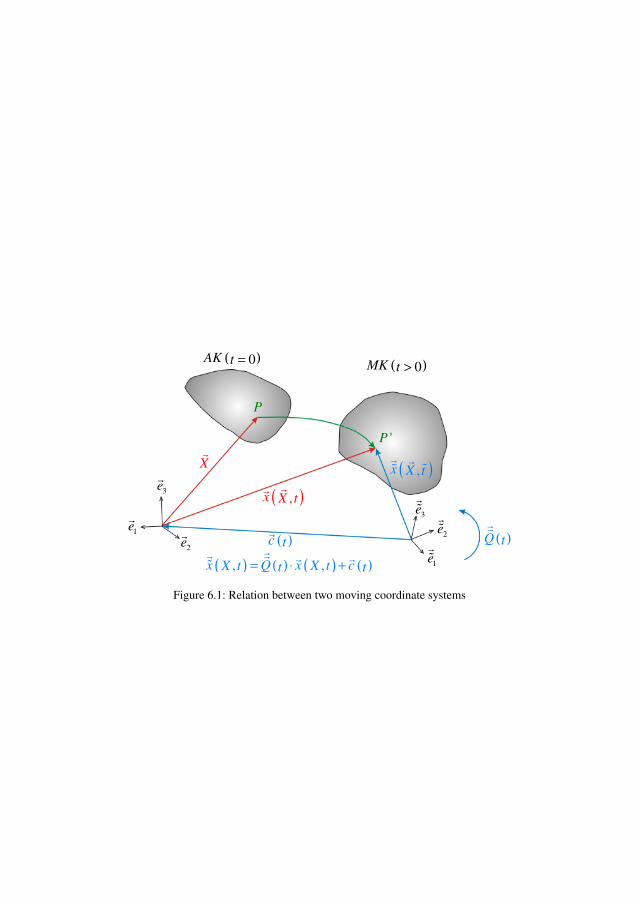
( )0AK t =( )0MK t >
( )c t�
( ),x X t
� �ɶɶ
( )Q t
��
P
'P
X
�
( ),x X t
��
( ) ( ) ( ) ( ), ,x Q x cX t X tt t= ⋅ +
�� � � �ɶ
Figure 6.1: Relation between two moving coordinate systems
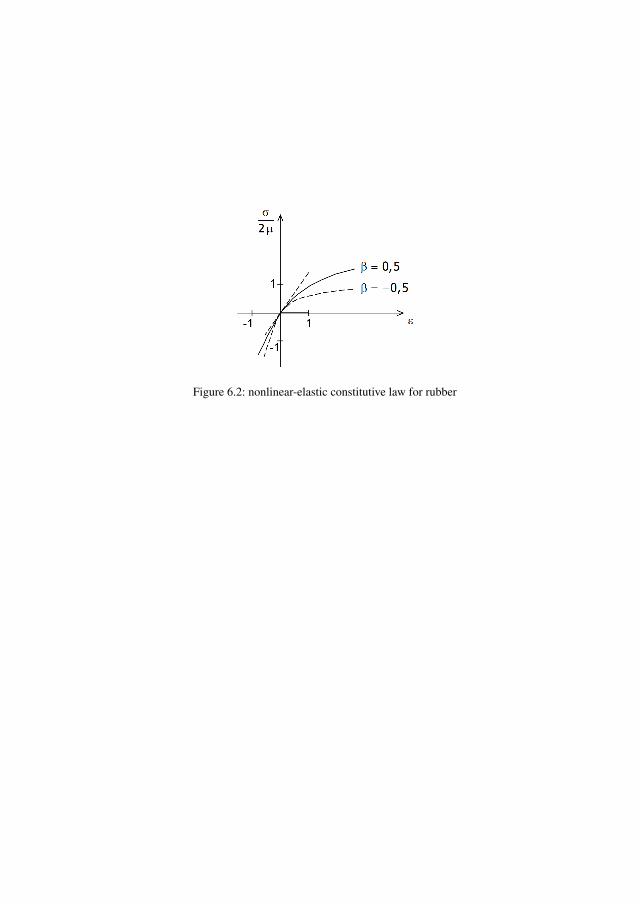
Figure 6.2: nonlinear-elastic constitutive law for rubber





























