-
8/6/2019 Contact Mechanic
1/68
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
7. Introduction to Contact
-
8/6/2019 Contact Mechanic
2/68
001360 30 May 2000
7-2
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual7. Introduction to contact
What is contact?
When two separate surfaces touch each
other such that they become mutuallytangent, they are said to be
in contact.
In the common physical sense, surfacesthat are in contact have
thesecharacteristics:
They do not interpenetrate. They can transmit compressive
normal
forces and tangential friction forces. They often do not
transmit tensile normal
forces. They are therefore free to separate and
move away from each other.
-
8/6/2019 Contact Mechanic
3/68
001360 30 May 2000
7-3
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual Introduction to contact
In this chapter, we will present an introduction to
nonlinearcontact analysis via the following topics:
A. Basic concepts
B. Using the contact wizard
C. Obtaining the solution
D. Postprocessing
E. Workshop
F. Assembly contact
The purpose is to introduce you to contact analysisprocedures
for simple (easily converged) models. Other,more advanced aspects
of contact analysis that are used tohandle more difficult models
are discussed in the Advanced Contact and Bolt Pretension training
manual.
-
8/6/2019 Contact Mechanic
4/68
001360 30 May 2000
7-4
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
A. Basic Concepts
Contact is a changing-status nonlinearity. That is, thestiffness
of the system depends on the contact status:
Status = Open Status = Closedand Sticking
Status = Closedand Sliding
-
8/6/2019 Contact Mechanic
5/68
001360 30 May 2000
7-5
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Contact is a strong nonlinearity, because both the normaland
tangential stiffness at contact surfaces changesignificantly with
changing contact status.
Large, sudden changes in stiffness often cause severeconvergence
difficulties.
u
F
Opencontact
Closedcontact
-
8/6/2019 Contact Mechanic
6/68
001360 30 May 2000
7-6
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Other factors that make contact analysis complicatedinclude:
The region of contact is typically unknown at the start of
the
analysis. Most contact problems include friction.
Friction is a path-dependent (energy-dissipating)phenomenon that
requires an accurate load history, withsmall time steps.
Frictional response can be chaotic, making solutionconvergence
difficult.
Parts might be unconstrained except for contact with
otherparts.
Prior to establishment of contact, such parts are
initiallyunconstrained free bodies, with zero overall
stiffness.
In a static analysis, unconstrained free bodies
aremathematically unstable. The solution blows up.
-
8/6/2019 Contact Mechanic
7/68
001360 30 May 2000
7-7
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Fortunately, current ANSYS contact technology enables youto
analyze a broad class of contact models fairly easily.
Many models can be solved successfully with very little
userintervention.
For those models that exhibit more difficult
convergencebehavior, a rich library of contact element options
are
available to help you overcome such difficulties. These more
advanced features are discussed in the Advanced
Contact and Bolt Pretension training manual.
-
8/6/2019 Contact Mechanic
8/68
001360 30 May 2000
7-8
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Contact classification
Contact problems fall into two general classes:rigid-to-flexible
and flexible-to-flexible.
Rigid-to-flexible One or more contacting surfaces are treated as
rigid. (One
surface has a significantly higher stiffness than the
other.)Many metal forming problems fall into this category.
Stresses within the rigid body are not calculated.
Flexible-to-flexible Both or all contacting bodies are
deformable. (All surfaces
have similar stiffnesses.) A bolted flange connection wouldbe an
example of flexible-to-flexible contact.
-
8/6/2019 Contact Mechanic
9/68
001360 30 May 2000
7-9
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Rigid-to-flexible contact
Rigid Surface
DeformableBody
-
8/6/2019 Contact Mechanic
10/68
001360 30 May 2000
7-10
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Flexible-to-flexible contact
Splined shaft interference
fit, both parts are flexible.
-
8/6/2019 Contact Mechanic
11/68
001360 30 May 2000
7-11
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Contact compatibility
Physical contacting bodies do not interpenetrate. Therefore,the
program must establish a relationship between the twosurfaces to
prevent them from passing through each other inthe finite-element
analysis.
When the program prevents interpenetration, we say that it
enforces contact compatibility.F
TargetContact
Penetration occurs when contact compatibility is not
enforced. F
-
8/6/2019 Contact Mechanic
12/68
001360 30 May 2000
7-12
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Contact compatibility penalty method
The penalty method of enforcing contact compatibility uses
acontact spring to establish a relationship between the
twosurfaces.
The spring stiffness is called the penalty parameter or,
morecommonly, the contact stiffness .
The spring is inactive when the surfaces are apart (open
status),and becomes active when the surfaces begin to
interpenetrate(closed).
The spring will deflect anamount , such that equilibriumis
satisfied:
F = k where k is the contact stiffness.
F
-
8/6/2019 Contact Mechanic
13/68
001360 30 May 2000
7-13
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
contact compatibility penalty method
Some finite amount of penetration, , is requiredmathematically
to generate a contact force at the interface.
This contact force is needed for equilibrium. Thus, must be
greater than zero for equilibrium.
However, physical contacting bodies do not interpenetrate.
Therefore, for best accuracy, the goal is to minimize the
amount of penetration that occurs at the contact interface.
Minimum penetration gives maximum accuracy. This implies that,
ideally, the contact stiffness should have a
very great value. However, too high of a value can lead to
convergence
difficulties.
-
8/6/2019 Contact Mechanic
14/68
001360 30 May 2000
7-14
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
If the contact stiffness is too great, a slight penetration
willgenerate an excessive contact force, potentially throwing
thecontacting surfaces apart in the next iteration.
Using too great a contact stiffness usually leads to
oscillatingconvergence, and often to outright divergence.
Iteration n Iteration n+1
F
F
F contactF
Iteration n+2
-
8/6/2019 Contact Mechanic
15/68
001360 30 May 2000
7-15
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Contact compatibility Lagrange multiplier method
An alternative method, the Lagrange Multiplier method, adds
an extra degree of freedom (contact pressure), to satisfy
theimpenetrability condition.
F
-
8/6/2019 Contact Mechanic
16/68
001360 30 May 2000
7-16
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Contact compatibility augmented Lagrangian method The most
modern ANSYS contact elements can combine both
the penalty method and the Lagrange multiplier to enforcecontact
compatibility. This is called the augmented Lagrangian method.
In the first series of iterations, contact compatibility
isdetermined based on the penalty stiffness. Once equilibriumis
achieved, the penetration tolerance is checked. At thispoint, if
necessary, the contact pressure is augmented andthe iterations
continue.
F
PenetrationTolerance
-
8/6/2019 Contact Mechanic
17/68
001360 30 May 2000
7-17
B
cS
ru
ua No
n
te
56
B
cS
ru
ua
No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
contact compatibility augmented Lagrangian method
Penetration
correctiondue to equilibrium.
Oscillation occursduring correctionstage.
Augmentingcontact stresses toreduce
penetration.
-
8/6/2019 Contact Mechanic
18/68
001360 30 May 2000
7-18
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Surface-to-surface elements
The most modern contact elements available in ANSYS arethe
surface-to-surface elements.
Targe169 and 170 Rigid or deformable target surfaces
Conta171 to 174 Deformable contact surfaces
These elements are well suited for surface-to-surface
contactapplications such as interference fit assembly contact,
entry
contact, forging, and deep drawing.
-
8/6/2019 Contact Mechanic
19/68
001360 30 May 2000
7-19
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
surface-to-surface elements
These contact elements use the concept of a contact pair,which
is composed of a target surface and a contact surface.
The surface-to-surface contact elements overlie the
underlyingfinite element model like a skin.
Separate element types define the target and contact surfaces.
The contact pair is identified through a shared real constant
set.
Contact elements (REAL = N )
on the contact surface
Target elements (REAL = N )
on the target surface
-
8/6/2019 Contact Mechanic
20/68
001360 30 May 2000
7-20
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
surface-to-surface elements
ANSYS supports both rigid-to-flexible and flexible-to-flexible
surface-to-surface contact models.
Flexible-to-flexible models have a deformable target surface
,
which is created whenever target elements overliedeformable
elements.
Rigid-to-flexible models have a rigid target surface , whichdoes
not overlie any deformable elements.
Rigid target element
Contact elements
Underlyingmesh
-
8/6/2019 Contact Mechanic
21/68
001360 30 May 2000
7-21
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
surface-to-surface elements
The surface-to-surface contact elements use the augmented
Lagrangian to enforce contact compatibility (default).
Augmented Lagrangian uses both a contact stiffness and
apenetration tolerance.
For simple contact models, you will normally need tospecify just
three characteristics of the contact pair:
A value for the contact stiffness A value for the penetration
tolerance.
You will also need to determine which surface in the pair
shouldbe the target, and which should be the contact.
-
8/6/2019 Contact Mechanic
22/68
001360 30 May 2000
7-22
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Contact stiffness
The contact stiffness is the most important parameteraffecting
both accuracy and convergence behavior.
Recall that greater stiffness gives better accuracy, but
moredifficult convergence.
You must carefully determine an appropriate value forcontact
stiffness.
The best value is often problem-dependent. Program-supplied
default value will often not be appropriate.
Some experimentation may be required to determine anappropriate
value that generates a converged solution with anacceptable level
of accuracy.
d
-
8/6/2019 Contact Mechanic
23/68
001360 30 May 2000
7-23
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
contact stiffness For the surface-to-surface elements, you
specify the contact
stiffness as a factor (FKN). That is, the program determinesthe
contact stiffness by multiplying the stiffness of theunderlying
element times a factor that you specify.
kcontact = FKN x f(k underlying )
For the surface-to-surface elements, the contact stiffness
hasunits of stiffness per unit area, or (F/L)/(L 2). A good value
for contact stiffness is often obtained by
making the contact stiffness equal to the stiffness of the
underlying elements. As a starting estimate, try:
FKN = 1.0 for bulky solids in contact.
FKN = 0.1 for more flexible (bending-dominated) parts.
I d i
-
8/6/2019 Contact Mechanic
24/68
001360 30 May 2000
7-24
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
contact stiffness
Sometimes, different regions of a model may need to
havedifferent contact stiffnesses.
Bulky contact; try FKN = 1.0
Flexible contact; try FKN = 0.1
I t d ti t t t
-
8/6/2019 Contact Mechanic
25/68
001360 30 May 2000
7-25
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
contact stiffness Determining a good stiffness value may require
some
experimentation. The following procedure may be used as a
guideline: Use a low value of FKN to start. Run the analysis to
a fraction of the final load.
Check the penetration and number of equilibrium iterations
usedin each substep. If convergence is being driven by the
penetration tolerance,
FKN may be underestimated (or the penetration tolerancemay
simply be too tight).
If no force convergence, or if many iterations are required
toobtain force convergence, FKN may be overestimated.
Adjust FKN and run the full analysis.
Introduction to contact
-
8/6/2019 Contact Mechanic
26/68
001360 30 May 2000
7-26
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
contact stiffness
Because results can be sensitive to the value used for FKN,you
should always verify the validity of your results.
If you have any doubts about the validity, perform a
sensitivitystudy.
Vary the contact stiffness and re-run.
Monitor some item of significance to your analysis, suchas:
Contact pressure. Maximum stress.
Look for a value of FKN beyond which results stabilize to
afairly consistent value.
Introduction to contact
-
8/6/2019 Contact Mechanic
27/68
001360 30 May 2000
7-27
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
contact stiffness
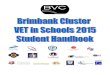
As an example, FKN was varied for an interference-fitanalysis of
a collar on a shaft. Maximum equivalent vonMises stress was
monitored.
In this particular case, a value of FKN = 1.0 proved to
giveadequate accuracy.
FKN Max. SEQV
0.001 4,000
0.01 20,0000.1 65,0001 91,000
10 92,900100 93,000
Introduction to contact
-
8/6/2019 Contact Mechanic
28/68
001360 30 May 2000
7-28
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
A. Contact stiffness Workshop
Please refer to your Workshop Supplement for instructions
on:
W14. Introduction to Contact - Contact Stiffness Study (FKN)
Introduction to contact
-
8/6/2019 Contact Mechanic
29/68
001360 30 May 2000
7-29
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
Penetration tolerance
The penetration tolerance also affects convergence andaccuracy,
although to a lesser extent than the contactstiffness.
As the penetration tolerance is tightened, the accuracy
mayimprove, but at the expense of more difficult convergence.
As with the stiffness, you specify thepenetration tolerance by
means of a factor (FTOLN).
The program determines the penetrationtolerance by multiplying
the depth of theunderlying element (h) times a factor that
youspecify.
Tolerance = FTOLN x h
Introduction to contact
-
8/6/2019 Contact Mechanic
30/68
001360 30 May 2000
7-30
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
... Basic Concepts
penetration tolerance
Dont use a soft FKN and a tight FTOLN.
Best convergence behavior is usually obtained if the
contactstiffness does most of the work of enforcing
compatibility.
Use a reasonably stiff value for FKN.
Fine-tune the penetration with a reasonable value ofFTOLN.
Too small a value for FTOLN will lead to convergencedifficulty.
Never use too small of a tolerance! Increasing the
penalty stiffness (FKN) will reduce the penetration. Although
increasing FKN by 100 times will usually reduce the
penetration accordingly, other items of significance, such asthe
contact pressure, might change by as little 5%.
Introduction to contact
-
8/6/2019 Contact Mechanic
31/68
001360 30 May 2000
7-31
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual
Introduction to contact
A. Penetration tolerance Workshop
Please refer to your Workshop Supplement for instructions
on:
W15. Introduction to Contact - Penetration Tolerance
Study(FTOLN)
Introduction to contact
-
8/6/2019 Contact Mechanic
32/68
001360 30 May 2000
7-32
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
Training Manual... Basic Concepts
Designating contact and target surfaces The program defines the
contact surface by a set of discrete
contact points (the element Gauss points). The program defines
the target surface as a continuous
surface. The two surfaces can interpenetrate between the
Gauss
points, without contact being recognized. This
causesinaccuracies.
Target Surface
Contact Surface
The target can penetrate the contact surface in between the
Gauss points.
Introduction to contact
-
8/6/2019 Contact Mechanic
33/68
001360 30 May 2000
7-33
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
Training Manual... Basic Concepts
designating contact and target surfaces
You can reduce the amount of unrecognized interpenetrationby
careful designation of the target and contact surfaces.
However, for rigid-to-flexible contact, the choice of target
andcontact is unchangeable. The rigid surface must always bethe
target.
Steel shaft (rigid)must be the targetsurface
Rubber boot (flexible)must be the contactsurface
Introduction to contact
-
8/6/2019 Contact Mechanic
34/68
001360 30 May 2000
7-34
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
Training Manual
designating contact and target surfaces
For flexible-to-flexible contact, best accuracy is achieved
bymaximizing the number of contact points. Follow theseguidelines
when designating flexible-to-flexible contact andtarget
surfaces:
If one surface has a coarse mesh and the other a fine mesh,
thesurface with the coarse mesh should be the target surface.
Consider what would happen if the designations werereversed:
... Basic Concepts
xxxxIf the finer mesh were the
target, it would droopacross the Gauss points,and penetrate as
shown.
Introduction to contact
-
8/6/2019 Contact Mechanic
35/68
001360 30 May 2000
7-35
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
Training Manual... Basic Concepts
designating contact and target surfaces
Other guidelines for designating contact and target surfaces: If
a convex surface comes into contact with a flat or concave
surface, the flat or concave surface should be the target
surface.
If one surface is stiffer than the other, the stiffer surface
shouldbe the target surface.
If one surface is higher order and the other is lower order,
thelower order surface should be the target surface.
If one surface is larger than the other, the larger surface
shouldbe the target surface.
Introduction to contact
-
8/6/2019 Contact Mechanic
36/68
001360 30 May 2000
7-36
B
cSru
ua No
n
te
56
B
cS
ru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
Training Manual... Basic Concepts
designating contact and target surfaces When all contact
elements are on one surface and all target
elements are on another surface, the model is said to have
asymmetric contact. Asymmetric contact is generally the most
efficient way to model
surface-to-surface contact. However, under some circumstances
asymmetric contact will
not perform satisfactorily. No clear distinction exists between
target and contact
surfaces.
Both target and contact surface have coarse meshes.
Sometimes the target-contactdistinction is not clear
Introduction to contact
-
8/6/2019 Contact Mechanic
37/68
001360 30 May 2000
7-37
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
Training Manual... Basic Concepts
designating contact and target surfaces
An alternative approach is to create a double set of
contactpairs. This is known as symmetric contact.
After creating one contact pair, simply create a secondcontact
pair having a reversed target-contact designation, forthe same
surfaces.
Contact
Target
Target
Contact
Step 1 - Create 1 st
Contact Pair
Step 2 - Create 2 nd
(Symmetric) Contact Pair
Introduction to contact
-
8/6/2019 Contact Mechanic
38/68
001360 30 May 2000
7-38
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
B
cSru
ua No
n
te
56
Training Manual... Basic Concepts
designating contact and target surfaces
Although some models may require symmetric contact foraccuracy,
be aware that it is less efficient than asymmetriccontact.
Therefore, dont use symmetric contact unless it is required.
Note also, that when using symmetric contact,postprocessing is
more difficult.
The contact pressure is the average value from both sets
ofcontact elements.
This average value is not automatically available as a
standardresults item. You will need to calculate it using APDL
orETABLE.
Introduction to contact
-
8/6/2019 Contact Mechanic
39/68
001360 30 May 2000
7-39
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
Training ManualA. Contact & target Workshop
Please refer to your Workshop Supplement for instructions
on:
W16. Introduction to Contact - Contact & Target
Designation
Introduction to contact
-
8/6/2019 Contact Mechanic
40/68
001360 30 May 2000
7-40
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
Training Manual... Basic Concepts
Rigid target surfaces pilot node By default, the program will
automatically constrain a rigid
target surface. That is, it will automatically ground the
target
with zero-value displacements and rotations. To model more
complicated behavior of the rigid target, you
can create a special one-node target element, called a pilot
node.
This element is associated with the target surface by means
ofhaving the same REAL attribute.
The pilot node acts as a handle for the entire rigid
surface.
You can specify nonzero displacements, rotations, forces,and/or
moments at the pilot node to model rigid-body motion ofthe target
surface.
Note that if a pilot node exists, the program will not auto-
constrain the rigid surface.
Introduction to contact
-
8/6/2019 Contact Mechanic
41/68
001360 30 May 2000
7-41
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
Training Manual... Basic Concepts
pilot node
The pilot node can be specifiedat any location. This allows
forgeneral rotations of the rigidtarget surface.
Only the pilot node can connect
to other elements. Forexample, to account for themass of a rigid
body, define amass element (MASS21) at the
pilot node. Each target surface can have
only one pilot node.
Rigid surface rotated
Pilot node
(at centerof rotation)
Introduction to contact
i h i d
-
8/6/2019 Contact Mechanic
42/68
001360 30 May 2000
7-42
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
Training ManualB. Using the contact wizard
Surface-to-surface contact elements can be created usingstandard
element-generation procedures: establish elementTYPE, REAL, and MAT
data, set element attributes, designate
target and contact surfaces, and then either mesh or useESURF
operations.
This procedure forces you to carry a fairly heavy mentaloverhead
as you create your contact pairs.
Fortunately, there is a better way ...
Introduction to contact
U i h i d
-
8/6/2019 Contact Mechanic
43/68
001360 30 May 2000
7-43
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
B
cSruua No
n
te
56
B
cSruua No
n
te
56
Training Manual... Using the contact wizard
The contact wizard provides a simple way to construct acontact
pair for most contact problems. The contact wizardwill guide you
through the process of creating a contact pair.
Preprocessor > Create > Contact Pair > Contact
Wizard
Introduction to contact
U i th t t i d
-
8/6/2019 Contact Mechanic
44/68
001360 30 May 2000
7-44
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
B
cSruua No
n
te
56
B
cSruua No
n
te
56
Training Manual... Using the contact wizard
Benefits of the Contact Wizard: Automatically defines element
types and real constant sets Quickly accesses the contact options
and parameters Contact pair viewing tools Quickly displays and
reverses contact normals
The Contact Wizard is not available until you have meshed some
portion of your model.
Before launching the wizard to create a flexible-to-flexible
model,mesh all parts of the model that will be used as contact
surfaces.
To create a rigid-to-flexible model, mesh only the parts of
themodel that will be used as flexible contact surfaces.
Introduction to contact
U i g th t t i d
-
8/6/2019 Contact Mechanic
45/68
001360 30 May 2000
7-45
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
B
cSruua No
n
te
56
B
cSruua No
n
te
56
Training Manual... Using the contact wizard
Lets see how we could add a contact pair to the connectormodel
from the Chapter 6 workshops.
First, designate rigid or flexible target type (if a choice
isapplicable), and pick the target surface. You can pick nodes,
nodecomponents, lines, or areas, depending on what entities are
presentin the model.
Introduction to contact
Using the contact wizard
-
8/6/2019 Contact Mechanic
46/68
001360 30 May 2000
7-46
B
cSruua No
n
te
56
B
cSru
ua No
n
te
56
B
cSruua No
n
te
56
B
cSruua No
n
te
56
Training Manual... Using the contact wizard
Next, pick the contact surface. Again, you can pick nodes,
nodecomponents, lines, or areas, depending on what entities are
presentin the model.
Introduction to contact
Using the contact wizard
-
8/6/2019 Contact Mechanic
47/68
001360 30 May 2000
7-47
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
Training Manual... Using the contact wizard
If you need to include friction effects, specify the coefficient
of friction.(More on friction on the next slide.)
Click on Optional settings tospecify the contact stiffness
andpenetration tolerance. (Otheroptions will be discussed in
theAdvanced Contact and Bolt
Pretension training course.)
Introduction to contact
Using the contact wizard
-
8/6/2019 Contact Mechanic
48/68
001360 30 May 2000
7-48
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
Training Manual... Using the contact wizard
A note about friction The surface-to-surface elements provide a
basic Coulomb
friction model that defines the equivalent friction stress
atwhich sliding occurs: = x p
is the coefficient of friction, defined as a material property,
asshown in the contact wizard on the previous slide.
If equals zero (default), no shear stress will be transmitted. p
is the contact pressure.
When the shear stress between the two surfaces exceeds x p, the
two surfaces will slide relative to each other.
More advanced friction options are also available. They
arediscussed in the Advanced Contact and Bolt Pretension training
manual.
T i i M l
Introduction to contact
Using the contact wizard
-
8/6/2019 Contact Mechanic
49/68
001360 30 May 2000
7-49
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
Training Manual... Using the contact wizard
Last, click on Create to create the contact and target
elementsthat comprise this contact pair.
The REAL constant
set used for thispair is identified.
The elements in the pair areautomatically plotted, with their
ESYSsymbols ON to indicate outwardnormal directions. If any normals
arepointing in the wrong direction, youcan flip them now.
T i i g M l
Introduction to contact
Using the contact wizard
-
8/6/2019 Contact Mechanic
50/68
001360 30 May 2000
7-50
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
Training Manual
At any time after a contact pair is created, you can also usethe
wizard to view and list the elements.
... Using the contact wizard
Training Manual
Introduction to contact
Using the contact wizard
-
8/6/2019 Contact Mechanic
51/68
001360 30 May 2000
7-51
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
Training Manual... Using the contact wizard
You can also use the wizard to delete a contact pair.
Training Manual
Introduction to contact
Using the contact wizard
-
8/6/2019 Contact Mechanic
52/68
001360 30 May 2000
7-52
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
Training Manual... Using the contact wizard
Pilot node The contact wizard does not enable you to create a
pilot node
for a rigid target surface. To create a pilot node, you will
have
to use meshing or direct generation: First, set the element
attributes (MAT, REAL, TYPE) for the target
elements. Remember to use the same REAL set as for the rest of
the
contact pair. Then mesh a keypoint that is located at the
desired position for
the pilot node. Recall that the pilot node can be at any
location it is not
required to be physically attached to the other
targetelements.
Alternatively, for direct generation, set an additional
attribute forthe target-element shape (TSHAP, PILO ) and then
create the
element at the desired node.
Training Manual
Introduction to contact
C Obtaining the solution
-
8/6/2019 Contact Mechanic
53/68
001360 30 May 2000
7-53
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
Training ManualC. Obtaining the solution
Automatic solution control, along with the default
optionsettings for surface-to-surface elements, generally leads
tofairly robust solutions for a broad class of contact
analyses.
If convergence difficulties are encountered, they generallyarise
due to one or more of three causes: Too great a value for contact
stiffness. Too tight a value for penetration tolerance. Too large a
value for minimum time step size.
To improve convergence, try these modifications to yourmodel, in
the following order of implementation:
Use a smaller FKN. Use a larger FTOLN. Use a smaller minimum
time step size (or larger maximum
number of substeps).
Training Manual
Introduction to contact
... Obtaining the solution
-
8/6/2019 Contact Mechanic
54/68
001360 30 May 2000
7-54
B
cSruua N
o
n
te
56
B
cSruua No
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
Training Manual... Obtaining the solution
If your model still wont converge with modified FKN, FTOLN,and
time step size, then the advanced contact options willprobably be
needed.
These are discussed in the Advanced Contact and Bolt Pretension
training manual.
If your model includes friction, small time step sizes
arerequired for accuracy, because friction is a
path-dependentphenomenon.
Unlike plasticity, there is no cutback control that will
triggerbisection if a friction time step is too large.
Note that in a contact solution, all equilibrium iterations
arecarried out before bisection for the first substep, to
helpestablish initial contact conditions.
Training Manual
Introduction to contact
D. Postprocessing
-
8/6/2019 Contact Mechanic
55/68
001360 30 May 2000
7-55
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
gD. Postprocessing
Results from contact models will contain many additionalitems
related to contact. Some of the more commonly useditems
include:
STAT Contact StatusPENE PenetrationGAP GapPRES Contact
PressureSFRI Friction Stress
These items are associated with the contact element (not
thetarget element), and can be readily accessed in the GUI.
Using the General Postprocessor, you can display them in
Nodal(averaged) or Element (unaveraged) contour plots.
Animated plots are especially helpful for contact analyses.
Using the Time-History Postprocessor, you can plot them as
time-history variables.
Training Manual
Introduction to contact
... Postprocessing
-
8/6/2019 Contact Mechanic
56/68
001360 30 May 2000
7-56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
p g
The contact status is an integer number that designates
thecurrent status of the contact element:
STAT = 0: Open and not near contact.
STAT = 1: Open, but near contact. STAT = 2: Closed and sliding.
STAT = 3: Closed and sticking.
Training Manual
Introduction to contact
... Postprocessing
-
8/6/2019 Contact Mechanic
57/68
001360 30 May 2000
7-57
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
p g
Note that a Nodal (averaged) contour plot of status will exhibit
non-integer contour values, due to the averaging. Element
(unaveraged)contour plots are usually more appropriate for contour
plots ofelement status.
Similarly, anomalous Nodal contour plots can occur for
othercontact results items. If a Nodal (averaged) contour plot
doesntseem to make sense, try an Element (unaveraged) plot
instead.
Contact Region Status >1 innodal
contour plot
Status = 1 inelement
contour plot
Training Manual
Introduction to contact
... Postprocessing
-
8/6/2019 Contact Mechanic
58/68
001360 30 May 2000
7-58
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
p g
The penetration or gap distance represents the actual amountof
penetration (for STAT = 2 or 3) or open gap (for STAT = 1),in
consistent units of length.
In listings, penetration distance is positive, and gap distance
isnegative. Because contour plots display either penetration or gap
(not
both simultaneously), the contours always display as
positive
values for both items. The contact pressure (PRES) and friction
stress values (SFRI)
represent the current values for the contact element, copiedfrom
the Gauss points to the nodes.
Training Manual
Introduction to contact
E. Workshop
-
8/6/2019 Contact Mechanic
59/68
001360 30 May 2000
7-59
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te
56
p
Please refer to your Workshop Supplement for instructions
on:
W17. Introduction to Contact - Snap-fit
Training Manual
Introduction to contact
F. Assembly contact
-
8/6/2019 Contact Mechanic
60/68
001360 30 May 2000
7-60
B
cSruua N
o
n
te56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te56
B
cSruua N
o
n
te
56
Many analysts now import solid models from CAD packages,and then
mesh and analyze the imported models in ANSYS.
For most CAD programs, a single volume, however complex,
represents a single part. Multiple-volume models will
haveseveral parts associated together in an assembly.
Part B
Part A
Training Manual
Introduction to contact
... Assembly contact
-
8/6/2019 Contact Mechanic
61/68
001360 30 May 2000
7-61
B
cSruua N
o
n
te56
B
cSruua N
o
n
te
56
B
cSruua N
o
n
te56
B
cSruua N
o
n
te
56
The boundaries between parts within an assembly usuallyrepresent
mathematical discontinuities within the CAD model.
When meshed in ANSYS, there will be a discontinuity in the
mesh at these part boundaries. Nodes on one side of theboundary
will not talk with nodes on the other side of theboundary.
Surface-to-surface contact elements can be used to connect
the mesh across part boundaries, using a concept known
asassembly contact.
Glue parts A & B
together usingassembly contact
Training Manual
Introduction to contact
... Assembly contact
-
8/6/2019 Contact Mechanic
62/68
001360 30 May 2000
7-62
B
cSru
ua N
o
n
te56
B
cSruua N
o
n
te
56
B
cSru
ua N
o
n
te56
B
cSruua N
o
n
te
56
Although assembly contact uses advanced contact featuresto glue
parts together, the procedure is straightforward andvery consistent
for different models.
In fact, ANSYS Inc.s designer-level product,
DesignSpace,includes automated assembly-contact procedures. It has
beenused successfully by designers who have no concept ofnonlinear
analysis procedures.
Because assembly contact is widely applicable, and isusually
simple (i.e., having robust convergence behavior),we will present
the procedure here, with little explanation ofthe advanced features
being used.
Training Manual
Introduction to contact
... Assembly contact
-
8/6/2019 Contact Mechanic
63/68
001360 30 May 2000
7-63
B
cSru
ua N
o
n
te56
B
cSruua N
o
n
te
56
B
cSru
ua N
o
n
te56
B
cSruua N
o
n
te
56
The CAD assembly must have these characteristics: The parts must
touch each other along a boundary. The boundary surfaces need not
match perfectly; some
mathematical noise in the geometry is tolerable. The two
adjacent parts must be meshed before an assembly
contact pair can be generated.
Training Manual
Introduction to contact
... Assembly contact
-
8/6/2019 Contact Mechanic
64/68
001360 30 May 2000
7-64
B
cSru
ua N
o
n
te56
B
cSruua N
o
n
te
56
B
cSru
ua N
o
n
te56
B
cSruua N
o
n
te56
As a tool for gluing interfacing boundaries together,assembly
contact is more generally applicable thanNUMMRG, EINTF, CPINTF,
CEINTF, and other such tools thathave been used in the past.
It is valid in large-displacement analyses (unlike coupling
andconstraint equations).
It can connect mismatched meshes (unlike NUMMRG and
EINTF). Assembly contact takes advantage of the bonded
contact
feature of the surface-to-surface contact elements to
gluedisconnected parts together.
To model a stronger bond, a very stiff value of FKN is
oftenused.
It is not unusual to use FKN = 10.
Training Manual
Introduction to contact
... Assembly contact
-
8/6/2019 Contact Mechanic
65/68
001360 30 May 2000
7-65
B
cSru
ua N
o
n
te56
B
cSruua N
o
n
te
56
B
cSru
ua N
o
n
te56
B
cSruua N
o
n
te56
The key to assembly contact is the creation of an
initiallyperfect contacting surface having no initial forces
actingacross the contact interface.
This is achieved by using the Exclude everything
initial-penetration option, along with the Bonded (always)
contactsurface behavior:
Training Manual
Introduction to contact
... Assembly contact
-
8/6/2019 Contact Mechanic
66/68
001360 30 May 2000
7-66
B
cSru
ua N
on
te56
B
cSruua N
o
n
te
56
B
cSru
ua N
on
te56
B
cSru
ua N
o
n
te56
If the only nonlinearity in your model is assembly contact,
youcan sometimes turn nonlinear iterations off in your
analysis.
Solution > Unabridged Menu > -Load Step Opts- Solution
Ctrl
Solution >Unabridged Menu >-Load Step Opts-
Nonlinear>Equilibrium Iter
However, realize that turning off nonlinear iterations
couldproduce a model that is not in perfect equilibrium.
Turn automaticsolution controlOFF
Specify ONEequilibriumiteration
Training Manual
Introduction to contact
... Assembly contact
-
8/6/2019 Contact Mechanic
67/68
001360 30 May 2000
7-67
B
cSru
ua N
on
te56
B
cSruua N
o
n
te
56
B
cSru
ua N
on
te56
B
cSru
ua N
o
n
te56
A model that has parts glued together with assembly contactcan
be used in many types of analyses, including:
Nonlinear static.
Nonlinear transient dynamic. Linear modal. Linear eigenvalue
buckling.
The initial status of the contact elements is frozen in alinear
analysis (such as modal or eigenvalue bucklinganalysis).
Training Manual
Introduction to contact
F. Assembly contact Workshop
-
8/6/2019 Contact Mechanic
68/68
001360 30 May 2000
7-68
B
cSru
ua N
on
te56
B
cSruua N
o
n
te
56
B
cSru
ua N
on
te56
B
cSru
ua N
o
n
te56
Please refer to your Workshop Supplement for instructions
on:
W18. Introduction to Contact - Assembly Contact