Embed Size (px)
Citation preview

Consistent dynamic event-triggered policies forlinear quadratic control
Duarte J. Antunes, Behnam Asadi Khashooei
Abstract—We say that an event-triggered control policy isconsistent if it achieves a better closed-loop performance thantraditional periodic control for the same average transmissionrate and does not generate transmissions in the absence ofdisturbances. In this paper, we propose a class of dynamic event-triggered control strategies that satisfy these two conditions forany linear system when performance is measured by an averagequadratic cost. A numerical example shows that these conditionsmay not be necessarily satisfied by a well-known event-triggeredpolicy for which transmissions are triggered if the euclidean normof the error between the system’s state and a state predictionexceeds a given threshold.
I. INTRODUCTION
L INEAR quadratic control is one of the achievements ofoptimal control with greatest impact on applications. For
many years, these applications have been restricted to periodic(sampled-data) control. However, the advent of networkedcontrol systems led to a new paradigm, known as event-triggered control (ETC), arising from the need to reduce thecommunication between sensors, actuators and controllers ina (networked) control loop. In ETC, control decisions includenot only what to apply to the plant but also when to transmitdata in the loop. Several works in the literature have tackledthe extension of linear quadratic control to event-triggeredcontrol [1]–[12]. However, to obtain the optimal transmissionpolicy one must typically solve a dynamic programmingproblem (cf. [1]–[4]), limited by the curse of dimensionality,and therefore one must settle with suboptimal policies (cf. [7]–[13]).
Two natural consistency properties to expect from a sub-optimal policy were proposed in the preliminary version ofthe present work [14]: (i) the policy achieves a better closed-loop performance than traditional periodic control for thesame average transmission rate and (ii) does not generatetransmissions in the absence of disturbances. In the contextof linear quadratic control, we assume that the model is linearand performance is measured by an average quadratic cost. Asexplained in [14], there appears to be no policy in the literaturethat guarantees these two consistency properties in this contextand for general classes of disturbances; [9], [10], [13] achievethe first property but not the second and [15] achieves thefirst and second properties although it is only useful when thedisturbances are sporadic, as we will discuss in the sequel (see
The authors are with the Control Systems Technology Group, Departmentof Mechanical Engineering, Eindhoven University of Technology, the Nether-lands. d.antunes,[email protected]
The second author is supported by the Dutch Science Foundation (STW)and the Dutch Organization for Scientific Research (NWO) under the VICIgrant “Wireless controls systems: A new frontier in Automation” (No.11382)”.
Section III-B). In fact, in the present work we show that acommonly used policy for which transmissions occur if theeuclidean norm of the error between the state and a stateprediction exceeds a certain threshold [16] does not necessarilysatisfy the first consistent property when considering an aver-age quadratic cost criterion. Finding an example that violatesthe second consistency property is simpler. For instance, theexample provided in [17, Sec. 5] shows that the proposedevent-triggered policy in [17] generates transmissions evenin the absence of disturbances. In fact, as discussed in thesequel, the second property is typically violated by ETCpolicies which do not incorporate a model-based control inputgenerator as proposed in [16] (e.g., the one in [17]).
In this paper, we present a class of consistent policiesfor linear quadratic control which take the form of dynamicETC, recently proposed in the literature [18], [19]. In dynamicETC, the conditions to trigger transmissions take into accountpast state information, in contrast with most policies wheretransmission decisions only depend on the present state infor-mation [1], [2], [4], [7], [9], [10], [15], [16]. We consider amodel for disturbances using Poisson jump processes, which,as suggested in [20], can capture the more commonly usedWiener process model for linear quadratic Gaussian (LQG)control and are easier to handle mathematically. Moreover,these processes can also capture sporadic disturbance models.The proposed ETC policies build upon the optimal periodiccontroller; they incorporate a model-based control input gen-erator, as the optimal periodic control law, and a schedulerparameterized by a positive scalar and a positive function,which is characterized in terms of the trade-off curve betweenaverage transmission rate and average quadratic performancefor periodic control.
The contribution of the present work is threefold. First,we present the proof of the result which appeared in [14]stating that the proposed ETC policy is consistent (Theorem 1).Second, we establish a set of novel results, in Sections III-Ato III-G, providing: (i) a class of policies that guarantee aminimum inter-transmission time and conditions under whichthese are consistent; (ii) upper and lower bounds on theperformance as a function of upper and lower bounds onthe inter-transmission times; (iii) interesting instances of theoriginal class of policies which exactly quantify performanceand incorporate the policy in [15]; (iv) (mean square) stability;(v) connections with periodic, output-feedback and dynamicETC. Third, as mentioned before, we show via an examplethat a commonly used ETC policy does not necessarily satisfythe first consistency property.
The paper is organized as follows. Section II formulates theproblem and discusses optimal periodic control. The proposed

policy and the main results are given in Section III. Section IVpresents a numerical example. Section V provides concludingremarks. The proofs of the results are given in the appendix.
II. PROBLEM FORMULATION AND PERIODIC CONTROL
The plant to be controlled is modeled by
x(t) = Ax(t) +Bu(t), x(0) = x0, t ∈ R≥0\E , (1)
where x(t) ∈ Rnx is the state and u(t) ∈ Rnu is the controlinput; (A,B) is assumed to be controllable, B is assumedto be full rank, and the initial condition x0 is random withprobability distribution µ0, finite mean and finite covariance;E := s``∈N is a set of times such that 0 < s1 < s2 < . . .and at which the state undergoes a jump modeled by
x(s`) = x(s−` ) + w`, (2)
where w``∈N is a sequence of independent and identicallydistributed random vectors with zero mean and finite covari-ance and x(s−` ) = limε→0,ε>0 x(s` − ε). We denote by µthe probability measure of w`, i.e., Prob[w` ∈ E] = µ(E)for any open set E and for every ` ∈ N and denote byW := E[w`w
ᵀ` ] the covariance of w`. We assume that
µ(0) = Prob[w` = 0] < 1 and that the pair (A,W 1/2)is controllable. We define s0 = 0 and we assume that thetime intervals b`+1 := s`+1 − s``∈N0 , N0 := N ∪ 0,are independent and exponentially distributed with rate λ, i.e.,Prob[s`+1 − s` > a] = e−λa, for every ` ∈ N0. The samplespace of the underlying probability space will be assumed tobe Ω = A, where
A := ω = (x0, ω0)|x0 ∈ Rn,ω0 = ((b1, w1), (b2, w2), . . . ), bi ∈ R≥0, wi ∈ Rn,
and the probability measure is such that the component x0 ofω = (x0, ω0) ∈ Ω is distributed according to µ0 and eachcomponent (bi, wi) of ω0 is such that bi is an exponentiallydistributed random variable with rate λ and wi is a randomvector distributed according to µ.
This disturbance model can capture more commonly usedmodels in the ETC community such as Wiener processes,considered, e.g., in [5]. In fact, as explained in [20] and in [21],the stochastic differential equation dx = axdt+ dω, where ωis a Wiener process can be understood as the limit as λ→∞of the jump system with continuous dynamics x = ax, andstate jumps x(s1
`) = x(s1`−)+1/
√λ, x(s2
`) = x(s2`−)−1/
√λ
where both si`+1− si`, i ∈ 1, 2 are exponentially distributedwith rate λ
2 ; this process can be shown to be equivalent to ajump system with dynamics x = ax and state jumps x(s`) =x(s`
−)+d` with Prob[d` = 1/√λ] = Prob[d` = −1/
√λ] = 1
2and with s`+1 − s` exponentially distributed with rate λ,which can be captured by (1), (2). As mentioned in [20], thisconstruction applies to more general systems. Note that themodel considered here can capture other cases of interest suchas the case where λ is small and events occur sporadically.
The event-triggered controller consists of two distributedcomponents connected by a network, a scheduler on the sensorside and a controller on the actuator side (see Figure 1); data
Fig. 1: Considered ETC setup; P-plant; C-controller; N -network; S-scheduler.
transmissions between the two components should be kept toa minimum.
The scheduler determines when the sensor data should betransmitted to the controller/actuators based on the informa-tion provided by the sensor measurements. We assume thatthe sensors provide full state information and denote thetransmissions times by tkk∈N, 0 < t1 < t2 < . . . , andt0 := 0 (we assume that the state is transmitted at the initialtime). Formally, the transmission times to be specified by thescheduler are stopping times, which, by definition, are randomvariables tk : Ω → R≥0 ∪ ∞ such that the event [tk ≤ t]belongs to the natural filtration of the process (1), (2) up totime t. Intuitively, given the state information up to time t,Is(t) := x(r)|r ∈ [0, t], one can decide if tk has occurredby time t or not. Note that at times tk the scheduler sendsx(tk) to the controller. Motivated by this fact, we restrict theclass of policies for the transmission times to take the formtk+1 = tk + τk, where the τk are stopping times with respectto the process x(tk + r)|r ∈ R≥0. We also restrict thescheduling policy to be such that E[τk] < ∞, for every k,which is the case if the τk are bounded. A scheduler is thenspecified by the sequence ζ := (τ0, τ1, τ2, . . . ).
The controller determines the control input applied by theactuators to the plant. Although the controller only receivesstate measurements at transmission times, it can in generalactuate the plant at every time t. Moreover, we considerscenarios where the transmission delays are small when com-pared to the inter-transmission times τk and for simplicitythese delays are assumed to be zero. Hence, the controllermust decide u(t) = µ(t, Ic(t)) based on the information setIc(t) := x(tk)|tk ≤ t, where µ(t, .) is in general a time-dependent control policy. However, motivated by the fact thatthe full state is received at time tk, we further restrict the classof control policies to take the form
u(t) = ρk(t− tk, x(tk)), t ∈ [tk, tk+1), (3)
for every k ∈ N0, were the ρk : R≥0 × Rnx → Rnu arecontinuous functions which fully characterize such a class.An event-triggered controller, denoted by π, is then specifiedby a control policy and a scheduling policy
π = ρ, ζ, (4)
where ρ = (ρ0, ρ1, . . . ).

Performance is measured by the following average quadraticcost
J := lim supT→∞1
TE[
∫ T
0
xᵀ(t)Qx(t) +uᵀ(t)Ru(t)dt], (5)
for positive definite matrices Q and R, which is typicallyconsidered in the context of linear quadratic control. Theaverage transmission rate associated with a given schedulerand controller policy is lim supT→∞
1T E[
∑∞k=0 1tk≤T ], where
1tk≤T = 1 if tk ≤ T and 1tk≤T = 0 if tk > T ; the averageinter-transmission time is
τ := lim supN→∞1
N
N−1∑k=0
E[τk]. (6)
Naturally, the average transmission rate equals 1/τ .In the case of periodic control, the scheduler is fixed and
specified by tk = kh, where h is the sampling period andcoincides with the average inter-transmission time τ = h. Asthe next result shows, given this periodic scheduler, we canobtain the optimal controller and an analytical expression forthe optimal average quadratic cost, denoted by Jper(h). Lettr(M) denote the trace of a square matrix M .
Lemma 1. Suppose that the scheduler corresponds to periodictransmissions with period h ∈ R>0, i.e., tk = kh, k ∈ N0.Then the control policy taking the form (3) that minimizes theaverage cost (5) is given by
u(t) = Kx(t), (7)
whereK := −R−1BᵀP, (8)
P is the unique positive definite solution to
AᵀP + PA− PBR−1BᵀP +Q = 0 (9)
and x(t) is obtained by running the following state estimator
˙x(t) =(A+BK)x(t), t ∈ R≥0\khk∈N0,
x(kh) = x(kh), k ∈ N0.(10)
Moreover, the optimal cost is given by
Jper(h) = tr(PλW ) + g(h),
where
g(h) =
1
htr(KᵀRK
∫ h
0
V (s)ds), if h > 0,
0, otherwise,(11)
and V (s) =∫ s
0eAr(λW )eA
ᵀrdr. Furthermore, g(h) is non-decreasing for every h ∈ R≥0, g(δ) > 0 for every δ > 0,and limh→0,h>0
g(h)−g(0)h = 1
2 tr(RK(λW )Kᵀ), and V (s)corresponds to the covariance of the error
e(t) := x(t)− x(t)
at time tk + τ , i.e. V (τ) = E[e(tk + τ)eᵀ(tk + τ)] for everyk ∈ N0 and τ ∈ R≥0.
Note that albeit this result resembles analogous results inthe context of LQG control [22, Sec. 5.4], [23, Ch. 8, Sec. 7],it considers a different class of models and disturbances, e.g.,the disturbances impact on the state only at given jump timesand wk are not necessarily Gaussian. In particular, the proofrelies on arguments for piecewise deterministic systems [24],instead of the traditional arguments using the Ito differentialrule [23, Ch. 8, Sec. 7]. This proof is given in the appendixand relies on the preliminaries given in the first subsection ofthe appendix.
The concept of consistency in the context of ETC is definednext.
Definition 1. Let Jπ and τπ denote the average quadratic costand the average inter-transmission time of an ETC policy π,defined in (4). We say that an ETC policy π is consistent if:• Jπ < Jper(τπ), i.e., if the event-triggered policy achieves
a better performance than that of periodic control forthe same average inter-transmission time (or averagetransmission rate).
• tk+1 ≥ sk, for every k ∈ N0, where
sk := mins`|s` > tk, ` ∈ N, (12)
i.e., the scheduler does not generate transmissions in theinterval [tk, tk + a), for any given a > 0, when nodisturbances occur in this interval.
Moreover, we say that an ETC policy is H-consistent ifthe first consistency property is satisfied and if tk+1 ≥minsk, tk +H, for every k ∈ N0 and for a fixed H .
The problem considered in this paper is to find a consis-tent policy for any linear system (1), (2). The nomenclatureconsistency is inspired by a related concept in the context ofswitched linear systems [25].
In the next section, we propose a class of consistent policiesby specifying a controller and a scheduling policy both build-ing upon Lemma 1, and in particular on the optimal periodictime-triggered controller (7), (10) and optimal performancedetermined by (11). An important fact, key to achievingthe second consistency property, is that the optimal periodiccontroller is a control input generator in the sense of [16], andso will be the controller of the proposed strategy. Note thatother consistent pairs of controllers and scheduling policies,addressing the event-triggered control problem formulated inthe present section and not necessarily building upon theoptimal periodic controller, may exist.
III. CONSISTENT ETC METHOD AND MAIN RESULTS
The proposed controller is given by
u(t) = Kx(t)
˙x(t) =(A+BK)x(t), t ∈ R≥0\tkk∈N0,
x(tk) = x(tk), k ∈ N0.
(13)
and is obtained by replacing the periodic times kh of theoptimal periodic controller (7), (10) by general transmission

(a) convex g (b) arbitrary g (c) g′(0) = 0
Fig. 2: Illustration of three special functions f < g. When g is convex f canbe linear, otherwise it can saturate after a given h = ε if the derivative atzero is not zero. If this derivative is zero, it is also always possible to find a(non piecewise affine) f .
times tk, k ∈ N0 specified by a state dependent schedulingpolicy.
The proposed scheduling policy builds upon the cost g(h)of the periodic control strategy. Let f(h) be a non-decreasingcontinuous function defined in a given interval h ∈ [h, h),h ∈ R≥0 and h ∈ R>0 ∪ ∞, such that
f(h) < g(h), for h ∈ (h, h), (14)
and suppose for now that f is positive except possibly at zero,when h = 0, in which case f(0) = 0. An important specialcase is when h = 0 and
f(h) = Ch, h ∈ [0, h) (15)
for some positive C. In particular, taking into account thederivative of g at zero given in Lemma 1, if g is convex wecan pick C ∈ (0, 1
2 tr(RK(λW )Kᵀ)) and then (14) holds,provided that KW 6= 0. If g is not convex, and still assumingKW 6= 0, we can pick
f(t) =
Ct, if t ∈ [0, ε),
Cε if t ∈ [ε, h),(16)
where we can always find positive scalars C and ε suchthat (14) holds since g is non-decreasing. In both cases, hmight be bounded or h =∞. Moreover, in the case KW = 0,since g(δ) > 0 for every δ > 0 (see Lemma 1), we can setf(t) = g(t)/2 for t ∈ [0, b), and f(t) equal to (16) for t ≥ b,where b and C such that g(b)/2 = Cb and b < ε. Note inthe latter case it is always possible to pick C, b, and ε suchthat (14) holds. The three cases are illustrated in Figure 2.
Given f , we start by defining a class of scheduling policiesparameterized by a scalar α
tk+1 = tk + τk
τk = infβk ∈ [h,∞)|1
α
∫ βk
0
eᵀ(tk + s)KᵀRKe(tk + s)ds ≥ f(βk) ∧ h,(17)
with the convention that inf∅ = ∞ and where we usethe notation a ∧ b := mina, b. Note that we could useequality in (17) instead of inequality (this will not be thecase for other scheduling policies considered in the sequel,see, e.g., (32)). This follows from the fact that the error e isa piecewise continuous function for every realization of therandom variables and the integral of a quadratic function of
the error is then continuous which is also the case for f byconstruction. Moreover, note that
e(t) = Ae(t), t ∈ R \ (E ∪ tk|k ∈ N0)e(s`) = e(s−` ) + w`, ` ∈ N0,
e(tk) = 0, k ∈ N0,
(18)
for an initial condition e(0) = 0. Thus, the error e(t) resets tozero at each transmission time tk and due to the memorylessproperty of the exponential distribution, the first disturbancetime after each tk has the same distribution as that of the firstdisturbance time after the initial time t0 = 0. Therefore, wecan conclude that
E[τk] = E[θα], for every k ∈ N0,
where
θα := inf β ∈ [h,∞) | ηα(β) ≥ f(β) ∧ h, (19)
and
ηα(β) :=1
α
∫ β
0
eᵀ(s)KᵀRKe(s)ds. (20)
In particular, the average inter-transmission time (6) is givenby τπ = E[θα]. The proposed ETC policy is defined for αsuch that
α ≤ E[θα]. (21)
The next lemma allows us to conclude that we can always findα such that (21) holds.
Lemma 2. LetL(α) := E[θα].
Then:(i) if h > 0, then L(h) > h.
(ii) if h = 0, then there is ε > 0 such that L(ε) > ε.(iii) if h <∞, then L(h) < h.(iv) L(α) is a non-decreasing function of α > 0.
Since L(h) > h, L(h) < h, for h > 0 and for h < ∞,and L is non-decreasing, we can simply plot L(α) for a densegrid of α and check when α ≤ L(α); note also that if L(α) iscontinuous, there exists α such that α = L(α). This approachcan also be followed when h = ∞ (by picking a sufficientlylarge h) and, according to Lemma 2(ii), when h = 0 (bypicking a sufficiently small h). Note that in order to computeE[θα] it suffices to consider the process (1), (2) with the ETCpolicy defined by (13), (17) in the interval [0, θα]. This canbe achieved by running such a process in this interval andperforming Monte Carlo simulations.
Before establishing consistency for the proposed ETC poli-cies, we state a key result, which considers the set of stoppingpolicies that specify the scheduler with the help of a generalfunction θ : A → R≥0 (not necessarily (19),(20))
τk(ω) = θ(x(tk), (b`(tk), w`(tk)), (b`(tk)+1, w`(tk)+1), . . . ),(22)
for k ∈ N0 where `(tk) := min `|s` > tk and b`(tk) :=s`(tk) − tk is exponentially distributed with rate λ, due to thememoryless property of the exponential distribution. Note that

the proposed stopping time policy for the scheduler (17) meetsthis description (see (19), (20)).
Lemma 3. Consider an event-triggered controller with controlpolicy (13) and scheduling policy specified by (22). Then, thecost (5) can be written as
J = gETC + tr(PλW ), (23)
where
gETC :=1
E[θ(ω)]E[
∫ θ(ω)
0
eᵀ(s)KᵀRKe(s)ds], (24)
provided that the expectations in (24) are finite.
The proof of this result is given in the appendix and relies onthe preliminaries given in the first subsection of the appendix.
The next theorem states that the policy (17) with the choiceof α that satisfies (21) meets the consistency properties whenf is concave (which can always be the case if KW 6= 0 asexplained before, see Figures 2(a), 2(b)). For a given α suchthat (21) holds let
ξ :=α
L(α)≤ 1.
Theorem 1. Suppose that f is a concave function suchthat (14) holds for a given interval (h, h) for h = 0 andthat either h < ∞ or E[θα] < ∞ if h = ∞. Let Jπ be theperformance of the ETC policy (13), (17) for α such that (21)holds and τπ = E[θα] the average inter-transmission time.Then
Jπ ≤ ξf(τπ) + tr(PλW ) < Jper(τπ). (25)
Moreover, if h =∞, we have that tk+1 > mins`|s` > tk.` ∈N0. Thus, in such a case, this is a consistent policy and ifh <∞ this is an h-consistent policy.
The last part of the theorem is a straightforward conse-quence of (18), since, if there are no disturbances, the error eafter a given transmission time tk remains equal to zero andno transmissions are generated (before h) according to (17). Inturn, (18) is a consequence of the proposed controller structure.For example, using a hold (instead of a model-based) lawu(t) = Kx(tk) for t ∈ [tk, tk+1) as in [17] would in generallead to transmissions even in the absence of disturbances.
An important special case of Theorem 1 is when f islinear (15). As stated in Section III-A below, in this case onecan replace the first inequality in (25) by equality.
Note that Theorem 1 assures the first consistency property ifh = 0. However, in practice it is desirable to have h > 0 suchthat there is a guaranteed minimal inter-transmission time. InSections III-B, we show that one can still obtain this firstconsistency property when h > 0 when the disturbances aresporadic (λ is small) and in Section III-C we show that abound on performance can still be found if h > 0 which canbe used to assert the first consistency property. Note also that,even if h = 0, there is no zeno behavior (an infinite numberof transmissions in a finite time interval) with probability one.
In fact, e.g., when h = ∞, the second consistency propertyassures that the number of transmissions is less than thenumber of state jumps caused by disturbances; the number ofdisturbance times follows a Poisson distribution, and thereforeit is finite in a finite interval with probability one [26, Ch. 3].
While Theorem 1 guarantees that the performance of theETC policy is better than that of periodic control for the sameaverage inter-transmission time it does not explicitly quantifysuch an average inter-transmission time and performance. InSection III-D, we discuss how to pick the parameters of themethod to tune the average inter-transmission time, providingalso upper and lower bounds on the performance of themethod. In Section III-E, we discuss the stability properties ofthe proposed method. In Section III-F, we discuss a periodicevent-triggered formulation and how to address the case whereonly partial information is available to the scheduler and inSection III-G we discuss the connection of the proposed policywith dynamic ETC.
A. linear f
When f is linear and described by (15), we can concludethe following result.
Theorem 2. If f(h) = Ch, h = 0, h = ∞, E[θα] < ∞,and C is such that (14) holds, then the performance Jπ andthe average inter-transmission time τπ = E[τα] of the ETCpolicy (13), (17) for α such that (21) holds are related by
Jπ = ξCτπ + tr(PλW ). (26)
This is one of the strongest and most interesting results ofthe paper: albeit transmissions in the loop are triggered withrespect to a state-dependent mechanism resulting in a non-linear closed-loop, when (15) holds, we can exactly quantifyperformance via (26).
B. h > 0, f = 0 and the role of sporadicity
In this section, we relax the requirement that f is positiveand slightly adjust the proposed policy (17) by consideringstrict inequality
τk = infβk ∈ [h,∞)|1
α
∫ βk
0
eᵀ(tk + s)KᵀRKe(tk + s)ds > f(βk) ∧ h
This adjusted policy coincides with (17) except when f(t) = 0for t in some interval [0, ε), ε > 0, which is the case of interestin this section. In fact, we take f(t) = 0 for every t ≥ 0, picka given h > 0 and fix h = ∞. Then, one can conclude thatafter a given transmission time tk a new transmission occursat tk +h if there was a disturbance in the interval [tk, tk +h),otherwise it occurs at the first disturbance event time aftertk + h. That is, the event-triggered policy can be written as
tk+1 = tk + max(h, sk − tk), (27)
where sk is given in (12). This policy coincides with the policyproposed in [15], where the average inter-transmission time

and average cost performance are exactly quantified. Usingthe notation of the present paper, these are described by
τ = h+1
λe−λh (28)
andJ = tr(PλW ) + gspor(h),
respectively, where
gspor :=1
τtr(KᵀRK
∫ h
0
V (s)ds).
Note that gspor < g(τ) where τ is a function of h given by (28)and therefore the first consistency property is always satisfied,as well as the second consistency property by construction.However, if λ is large then τ approaches h, and both transmis-sion rate and performance approach that of periodic control,which is also clear from the construction of the policy.
C. h > 0 and f > 0
Theorem 1 is quite general. It states that for any linearplant one can always find a consistent ETC policy, based ona concave positive f (if KW 6= 0). However, Theorem 1requires h = 0 and this is not ideal in practice. The nexttheorem states a similar statement to Theorem 1 when h > 0.For this theorem we assume there exists α such that L(α) = αwhich is the case if L is continuous.
Theorem 3. Suppose that f is a concave function suchthat (14) holds for a given interval (h, h), h > 0, and that eitherh < ∞ or E[θα] < ∞. Moreover, suppose that f(h) = g(h)and that there exists α such that α = L(α). Then, thefollowing holds for the ETC policy (13), (17) for α = L(α)
Jπ ≤ g(h) + f(τπ) + tr(PλW ). (29)
Note that the policy only satisfies the first consistencyproperty if
g(h) + f(τπ) < g(τπ)
which is the case if h is sufficiently small (since g(h) → 0when h→ 0 and f < g).
The conclusions regarding the second consistency propertyfor this case are similar to the ones drawn in Theorem 1.
D. Tuning the transmission rate and bounds on performance
The proposed method is completely characterized by thechoice of the function f (and its domain (h, h)) and the scalarα, which can be used as tuning knobs to find an appropriatetransmission rate and performance. Note that there is someredundancy in selecting these since parameters with the samevalue αf correspond to the same policy (17). Motivated bythis fact, in the next discussion, we fix α by considering thatα can be uniquely determined by α = L(α), which is the casewhen L is continuous; the effect of considering a different α,is then the same as considering a different f multiplied by aconstant.
Clearly, if f1(h) < f2(h), for every h ∈ (h, h) thenthe average inter-transmission time and cost are larger forthe method corresponding to f2. For example, when h = 0and (15) holds, we can increase (decrease) the slope C toincrease (decrease) the average inter-transmission time andcost. However, since C is upper-bounded for the choice (15),the average inter-transmission time is also upper-bounded. Toachieve a larger average inter-transmission time, we can selecta larger h and different functions f . However, one shouldtake into account that not only is this beyond the scope ofTheorem 1 (thus, consistency might not hold), but increasing hwill limit performance. The next lemma formalizes this point,providing upper and lower bounds on performance in termsof h, h.
Lemma 4. Let Jπ be the performance of the proposed ETCpolicy for α such that (21) holds, h > 0 and h <∞. Then
ξh
αg(h) + tr(PλW ) ≤ Jπ ≤ g(h) + tr(PλW ). (30)
The next Lemma provides an additional upper bound on theperformance, when f is described by (16)
Lemma 5. Let Jπ be the performance of the proposed ETCpolicy for α such that (21) holds, when f is described by (16)for given C and ε, for h = 0, and such that either h <∞ orE[θα] <∞ if h =∞. Then
Jπ ≤ ξCε+ tr(PλW ). (31)
E. Stability
One of the advantages of tackling control problems inan optimal framework is that stability typically follows. Inthe present case, it is well-known in the context of LQGcontrol that the optimal discrete-time periodic controller inLemma 1 is stable, in a mean-square sense, and this statementremains valid for the class of disturbances considered here.Since the proposed ETC achieves a lower quadratic cost thanoptimal periodic control one should also expect (mean-square)stability; mean square stability is defined as
supt∈R≥0
E[xᵀ(t)x(t)] ≤ c
for some positive scalar c, which depends on the distributionof the initial state x0. In fact, this is the case as stated in thenext result.
Theorem 4. Suppose that the conditions of Theorem 1 hold.Then the process (1), (2) with ETC policy (13), (17) for αsuch that (21) holds is mean-square stable.
F. Periodic event-triggered control and output feedback
In the context of periodic ETC [27] suppose that the fullstate or a partial state is only available (measured) and thecontrol input is only updated at a given sampling period τs,

i.e., at sampling times rk = kτs. Let xk := x(rk) and let yk
denote the output available at time rk
yk
= Cxk + vk
where vk|k ∈ N0 is the sequence of independent andidentically distributed random variables modeling sensor noise.Full state feedback can be modeled by vk = 0 for every k andC = I . Between sampling times assume that the control inputis hold constant
u(t) = uk, t ∈ [rk, rk+1),
for a given control input uk Then, we can conclude from themodel (1), (2) that
xk+1 = Axk +B uk + wk
where A = eAτs and B =∫ τs
0eAsdsB and wk|k ∈ N0
can be shown to be a sequence of independent and identicallydistributed random variables.
In this discrete-time setting an ETC problem analogous tothe one considered in Section II can be formulated; the ETCpolicy must decide at which times rk a transmission shouldoccur, indicated by a variable σk = 1 if the decision is totransmit and σk = 0 otherwise, based on the information
y`|` ∈ 0, 1, . . . , k
and the controller must decide uk based on the information
y`|σ` = 1, ` ∈ 0, 1, . . . , k
Considering this framework, possibly for a fast samplingrate (small τ ), allows to generalize the present work to thecase where only partial state information is available at agiven fixed rate. This discrete-time problem is tackled in [28]where it is proposed to use two Kalman filters, one at thecontroller side and another at the scheduler side, and scheduletransmissions based on the error between the two Kalman filterestimates between transmission times. These Kalman filtersprovide optimal state estimates when wk and vk are Gaussian.
G. Connection with dynamic event-triggered control
Most of the initial works on ETC (see, e.g. [5]) consideredstatic ETC policies in the sense that the decisions to triggertransmissions depend on current state variables. A typical ex-ample are absolute threshold policies for which transmissionsare triggered if the norm of the current error exceeds a certainthreshold. In our setting, the threshold policy with euclideannorm (denoted by ‖.‖2) corresponds to
tk+1 = tk + τk
τk = infak > 0| ‖e(tk + ak)‖2 > Y (32)
for some Y > 0. However, some recent works have proposeddynamic event-triggered controllers (see, e.g., [18], [19]) bywhich current transmission decisions depend on previous errorstate variables. In particular, the event-triggered controllerhas dynamic variables which filter error variables and thetriggering policy depends on these dynamic variables. Notethat the proposed ETC policy fits this description of dynamicETC since we can write (17) as
0 0.2 0.4 0.6 0.8 1Average inter-transmission time
0
2.5
5
7.5
10
Per
form
ance
- qu
adra
tic a
vera
ge c
ost
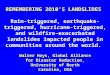
Periodic controlETC threshold \|e\| > YConsistent dynamic ETC
Fig. 3: Trade-off curve average inter-transmission time version performancefor three different policies
tk+1 = tk + τk
τk = infβk ∈ [h,∞)|γ(βk)− f(βk) ≥ 0 ∧ h.(33)
where
γ(t) =1
αeᵀ(t)KᵀRKe(t), t ∈ [tk, tk+1),
γ(tk) = 0,(34)
and γ is a dynamic variable driven by a function of the error.
IV. NUMERICAL EXAMPLE
Consider the following process and cost parameters
A =
[1 ε10 1
], B =
[1 00 1
], Q =
[10 00 ε2
], R =
[10 00 ε2
].
ε = 0.01, ε2 = 0.001 and for the disturbances/events param-
eters λ = 50, W =
[0.001 0
0 0.4
]with w``∈N normally
distributed with zero mean. We propose to compare threepolicies: (i) periodic control for which the cost g(h), describedby (11), can be computed symbolically and one can evaluateddhg(h)|h=0 = 1.4274; (ii) the proposed dynamic ETC forwhich we consider α = 0.2, h = 0, h = 10, and differentvalues of C such that Cα < 1.4274 so that (14) is met; (iii)a threshold-based ETC policy
tk+1 = tk + infak ∈ [0,∞) | ‖e(tk + ak)‖2 ≥ Y ∧ h
where ‖e‖2 is the Euclidean norm and h = 10. We pickthe following values for the following parameters C ∈0.25, 0.5, 0.75, . . . , 6, Y ∈ 0.25, 0.5, 0.75, . . . , 4.5 suchthat the average inter-transmission time belongs to the interval[0, 1]. The results are presented in Figure 3, showing thetrade-off curves between average inter-transmission time andquadratic average cost performance for the three different poli-cies. Note that the threshold-based policy, typically consideredin the literature, is clearly not consistent since its performanceis worse than that of periodic control for the same averageinter-transmission time. In turn, the proposed policy satisfiesthis first consistency property, highlighting the advantages ofdesigning ETC policies that are consistent by construction.

V. CONCLUSIONS AND FUTURE WORK
In this paper, we defined two consistency properties for anETC policy and we proposed a class of policies that meetthese properties. We provided an example of a linear quadraticcontrol problem for which a traditional ETC policy, wheretransmissions occur if the euclidean norm of the error betweenthe system’s state and a state estimate exceeds a threshold,is not consistent. On-going work aims at guaranteeing theconsistency properties for a similar threshold policy using adifferent norm. Future work will also tackle the case wherethe control input is constrained, as considered in some recentworks [29], [30].
APPENDIX
This appendix provides first some preliminaries needed toprove Lemma 1 and Lemma 3 and then establishes the resultspresented in the paper.
PRELIMINARIES FOR THE PROOFS OF LEMMAS 1, 3
In [31] it is justified that the family of processes (for eachk ∈ N0) (1), (2) in the interval [tk, tk+1) with a given initialcondition x(tk) and deterministic control input (13) in thisinterval, is a piecewise deterministic process with state ξ =[xᵀ x0ᵀ r]ᵀ ∈ Rn where x0 = x(tk) keeps track of the initialcondition, r = t− tk is the time elapsed since the initial timetk. The extended generator of this process, denoted by U , isan operator in the space of functions F : Rn → R such thatF (ξ(s+r))−F (ξ(s))−
∫ s+rsUF (ξ(a))da is a martingale for
any positive s, r [24, p. 33]. The expression for this operatoris given in [24, Th. 26.14, p. 69] for a large class of functionsF , which are said to belong to the domain of the infinitesimalgenerator. For functions F (x) depending only on x, it is givenby
UF (x)=[∂
∂xF (x)]ᵀ(Ax+Bu)+λ(
∫RnF (x+w)dµ(w)−F (x)),
(35)where u = ρk(τ, x0). The martingale property implies that
E[F (x(tk + τk))|x(tk)] =
F (x(tk)) + E[
∫ tk+τk
tk
UF (x(s))ds|x(tk)](36)
where τk is a stopping time (in particular a constant) as definedin (22). We will use this formula for linear and quadraticfunctions of the process which can be shown to belong to thedomain of the generator (i.e., satisfy conditions 1-3 of [24,Th 26.14, p. 69]). If we let F (x) = xᵀPx where P is theunique positive definite solution to the Riccati equation (9)(uniqueness follows from the assumption that Q and R arepositive definite - see, e.g., [32]), we have that
UxᵀPx = (Ax+Bu)ᵀPx+ xᵀP (Ax+Bu) + λtr(WP )
= −xᵀQx− uᵀRu+ (u−Kx)ᵀR(u−Kx) + tr(PλW )
where we used (9) and completion of squares. Then, from (36)we conclude that
E[
∫ tk+τk
tk
xᵀ(s)Qx(s)ds+ uᵀ(s)Ru(s)ds|x(tk)] =
E[
∫ tk+τk
tk
(u(s)−Kx(s))ᵀR(u(s)−Kx(s))ds|x(tk)]
− E[xᵀ(tk + τk)Px(tk + τk)|x(tk)] + xᵀ(tk)Px(tk)
+ E[τktr(λWP )|x(tk)]
(37)
where u(s) = ρk(s− tk, x(tk)) for s ∈ [tk, tk+1).Also in [31], the following equality, building upon the strong
Markov property, is justified
E[F (x(tk+s))|x(tr), r ∈ N0∩[0, tk]] = E[F (x(tk+s))|x(tk)](38)
for a measurable function F : Rnx → R, any k ∈ N0, and anys > 0.
PROOF OF LEMMA 1
In the interval t ∈ [tk, tk+1) let x(t) := E[x(t)|x(tk)]. Itis clear that x(tk) = x(tk), where tk = kh. From (35) weobtain Ux = Ax + Bu where Ux indicates the infinitesimalgenerator (35) applied to each component of x. From (36) weobtain
E[x(t)|x(tk)] = x(tk)+
∫ t
tk
E[Ax(s)+Bu(s)|x(tk)]ds, (39)
where u(s) = ρk(s − tk, x(tk)) for s ∈ [tk, tk+1). Thisis a Volterra equation for E[x(t)|x(tk)] and since ρk iscontinuous, it is possible to show (see [33, Th. 3.5, Ch.2 ]) thatE[x(t)|x(tk)] is continuous and since the integrand in (39) iscontinuous, E[x(t)|x(tk)] is differentiable. Differentiating (39)we conclude that
˙x(t) = Ax(t) +Bu(t),
for t ∈ [tk, tk+1), and x(tk) = x(tk). Consider the followingauxiliary cost
E[
∫ T
0
xᵀ(s)Qx(s) + uᵀ(s)Ru(s)ds+ xᵀ(T )Px(T )] (40)
for T = tK+1 = (K + 1)h for an arbitrary integer K > 1and where P is the solution to the Riccati equation (9). FromBellman’s principle of optimality we can obtain the optimalu(t) for t ∈ [tK , tK+1) by taking into account only the cost
E[
∫ tK+1
tK
xᵀ(s)Qx(s) + uᵀ(s)Ru(s)ds+
xᵀ(tK+1)Px(tK+1)|x(tK)]
(41)
Note that u(s) is a deterministic function ρk in this intervalgiven x(tk). Let v(t) = ρk(t − tk, x(tk)) be also a functionof this form and assuming that u(t) = v(t) + Kx(t) we canoptimize in v(t) without loss of generality (since one can pick

v(t) = −Kx(t) + ρk(t − tk, x(tk))). Then, using (37) fork = K and τK = h, we conclude that (41) equals
xᵀ(tK)Px(tK) + E[
∫ tK+1
tK
eᵀ(s)KᵀRKe(s)ds] +
2E[
∫ tK+1
tK
eᵀ(s)KRv(s)ds] + (42)
E[
∫ tK+1
tK
vᵀ(s)Rv(s)ds] + htr(PλW ) (43)
The cross term in (42) is equal to zero since v(t) is deter-ministic given x(tk) and E[e(t)] = E[x(t)− x(t)|x(tk)] = 0.Then it is clear that the optimal solution is v(t) = 0 for everyt ∈ [tk, tk+1) which means that the optimal input is
u(t) = Kx(t), t ∈ [tk, tk+1) (44)
for k = K and the cost-to-go can be written asxᵀ(tK)Px(tK) + κ where
κ = htr(P (λW )) +
∫ tK+1
tK
tr(KᵀRKE[e(s)eᵀ(s)])ds
is a constant. In order to compute a different expression for thisconstant we apply (35) to (each component of) the functioneeᵀ concluding that
Ueeᵀ = Aeeᵀ + eeᵀAᵀ + λW
and, from (36) for τk = r, r ∈ [0, h), taking into account thate(tk) = 0,
E[e(tk + r)eᵀ(tk + r)] = A
∫ tk+r
tk
E[e(s)eᵀ(s)]ds+
+
∫ tk+r
tk
E[e(s)eᵀ(s)]dsAᵀ + λWr + e(tk)eᵀ(tk)︸ ︷︷ ︸=0
.
(45)The notation Ueeᵀ indicates the infinitesimal generator (35)applied to each component of eeᵀ. If we let V (r) = E[e(tk +r)eᵀ(tk + r)] we obtain
V (r) = A
∫ r
0
V (s)ds+
∫ r
0
V (s)dsAᵀ + rWλ
which is a Volterra equation with a unique solution (cf. [33,Th. 3.1]) given by V (s) =
∫ s0eAr(λW )eA
ᵀrdr (which can beconfirmed by direct replacement). Then, we conclude that
κ = htr(PλW ) + hg(h),
where g is given by (11). The optimal cost (40) can then bewritten as
E[
∫ tK
0
xᵀ(s)Qx(s) + uᵀ(s)Ru(s)ds+
xᵀ(tK)Px(tK) + κ]
where xᵀ(tK)Px(tK) + κ is the cost-to-go. Using a similarreasoning, we can conclude that the optimal control input inthe interval [tK−1, tK ] takes the form (44), for k = K−1 andthe cost-to-go is xᵀ(tK−1)Px(tK−1) + 2κ. By applying thisreasoning successively we obtain that the optimal control law
is given by (44), for k ∈ 0, 1, . . . ,K, and the optimal costis
E[
∫ T
0
xᵀ(s)Qx(s) + uᵀ(s)Ru(s)ds+ xᵀ(T )Px(T )]
= (K + 1)κ+ xᵀ(0)Px(0).
(46)
We divide both sides of (46) by T and take the (sup) limit asT = (K + 1)h converges to infinity. It is clear that the termxᵀ(0)Px(0)/T converges to zero and we will prove that theterm E[xᵀ(T )Px(T )]/T converges to zero as T →∞ shortly,by establishing that
E[xᵀ(T )Px(T )] ≤ C, for every T ∈ R≥0. (47)
Then we obtain that the average cost performance on the left-hand side and on the right-hand side coincides with the desiredcost κ/h.
To prove (47) we start by noticing that for xk := x(tk)
E[
∫ tk+h
tk
xᵀ(s)Qx(s) + uᵀ(s)Ru(s)ds|x(tk)]
≥ xᵀ(tk)[E[
∫ b
0
e(A+BK)ᵀsQe(A+BK)sds]x(tk)
≥ δxᵀkxk ≥δ
cxᵀkPxk
for b = minsk− tk, h, sk defined in (12), some sufficientlysmall positive δ, and c is such that P ≤ cI , where we usedthe fact that Q is positive definite, and that in the intervaltk, tk + b, x(t) = (A+BK)x(t). Then, from (37) for τk = hwe conclude that
E[xᵀk+1Pxk+1|xk] ≤ (1− δ
c)xᵀkPxk + d (48)
where c and δ can be picked such that 0 < (1 − δc ) < 1 and
d = htr(λWP ) + hg(h). From (48) we can conclude that
E[xᵀk+1Pxk+1|x0] ≤ (1− δ
c)k+1E[xᵀ0Px0] + d
where d =∑k`=0(1− δ
c )`d converges to a constant d/(1− δc )
as k →∞. Using the fact that the covariance of the initial statex0 is finite, we conclude that E[xᵀkPxk] is uniformly boundedby a constant which depends on the distribution of the initialstate x0 and so is E[xᵀkxk] since P is positive definite. To seethat between times tk and tk+1, E[xᵀ(tk+s)Px(tk+s)] (andhence also E[xᵀ(tk + s)x(tk + s)]) is also uniformly boundedwe use again (37) to conclude that for every s ≥ [0, h)
E[xᵀ(tk + s)Px(tk + s)|x(tk)] ≤ (1− δ
c)xᵀkPxk + d.
To prove the properties related to the function g we start bynoticing that the controllability of the pair (A,W 1/2) impliesthat ‖W 1/2eA
ᵀt‖2 > 0 for every t ∈ R≥0. This impliesthat V (s) is positive definite. The facts that B is full rank,Q, R are positive definite, imply that K is full rank andtherefore KV (s)Kᵀ is positive definite, which in turn impliesthat Z(δ) := K
∫ δ0V (s)dsKᵀ is positive definite for every
δ > 0. Since R is also positive definite and λ is positive

g(δ) = 1δ tr(RZ(δ)) > 0 for δ > 0. Moreover, note that we
can write g as
g(h) =1
h
∫ h
0
z(s)ds, z(s) := tr(RKV (s)Kᵀ).
It is clear that V (s) is positive definite for every s ∈ R>0
and V (t) ≥ V (s) if t > s. Then z(s) is non-decreasing andsince g(h) is the mean value of an non-decreasing functionin the interval [0, h] it is also non-decreasing. The right-handderivative can be obtained by standard calculus rules.
PROOF OF LEMMA 2
We start by proving (i). Consider the following partitionΩ = Ω1 ∪ Ω2 where
Ω1 := ω ∈ Ω|θα(ω) = h, Ω2 := ω ∈ Ω|θα(ω) > h(49)
for α = h. In Ω2 lies, for instance, the event [s1 > h] orequivalently the event [b1 > h] which has non-zero probability.It is then clear that Prob[Ω2] > 0. Thus
L(α)|α=h = E[θα(ω)] = E[θα(ω)1Ω1] + E[θα(ω)1Ω2
]
= hProb[Ω1] + E[θα(ω)|ω ∈ 1Ω2]Prob[Ω2] > h.
To prove (ii) we define the following sets, for a given α > 0and a given δ > 0, Ωδ1 := ω ∈ Ω|θα(ω) ≥ δ, Ωδ2 := ω ∈Ω|θα(ω) < δ. Then,
L(α) = E[θα(ω)] = E[θα(ω)1Ωδ1] + E[θα(ω)1Ωδ2
]
≥ E[θα(ω)1Ωδ1]≥δProb[Ωδ1] ≥ δProb[s1 > δ]=δe−λδ
It is then clear that (ii) holds for example for ε = α = 12δe−λδ .
To prove (iii), we let Ω = Ω3 ∪ Ω4 where
Ω3 := ω ∈ Ω|θα(ω) = h, Ω4 := ω ∈ Ω|θα(ω) < h,(50)
for α = h and note that
L(α)α=h = E[θα(ω)] = E[θα(ω)1Ω3] + E[θα(ω)1Ω4
]
= hProb[Ω3] + E[θα(ω)|ω ∈ 1Ω4]Prob[Ω4] < h
where we used the fact that Prob[Ω4] > 0. To see this latterfact, note that, for ηα as in (20) and h ∈ (h, h), E[ηα(h)] =hαg(h) from which ω ∈ Ω|ηα(h) ≥ h
αg(h) has non-zeroprobability, and this set belongs to Ω4. In fact, if ηα(h) ≥hαg(h), then the following must hold θα(ω) ≤ h < h.
To establish (iv) consider positive scalars α1, α2 such thatα1 < α2. Then for any ω ∈ Ω, we have
θα1(ω) ≤ θα2
(ω) (51)
since ηα1(β) > ηα2(β) for any β > 0, and therefore
θα1(ω) = inf β ∈ [h,∞) | ηα1(β) ≥ f(β) ∧ h≤ inf β ∈ [h,∞) | ηα2(β) ≥ f(β) ∧ h = θα2(ω).
From (51), we conclude L(α1) = E[θα1 ] ≤ E[θα2 ] = L(α2),that is, L(α) is non-decreasing for α > 0.
PROOF OF LEMMA 3
Since the controller is fixed and given by (13), we have
u(t)−Kx(t) = −Ke(t) (52)
Then, if we let N(T ) := maxk ∈ N0|tk < T for a largeT > 0, we have
E[
∫ T
0
xᵀ(s)Qx(s) + uᵀ(s)Ru(s)ds]
= Eµ0[E[N(T )−1∑k=0
E[
∫ tk+1
tk
xᵀ(s)Qx(s) + uᵀ(s)Ru(s)ds|x(tk)]
+E[
∫ T
tN(T )
xᵀ(s)Qx(s) + uᵀ(s)Ru(s)ds|x(tN(T ))]|x0
]]
= T tr(P (λW ))− E[xᵀ(T )Px(T )] + E[xᵀ(0)Px(0)]
+E[
N(T )−1∑k=0
∫ tk+1
tk
eᵀ(s)KᵀRKe(s)ds] (53)
+E[
∫ T
tN(T )
eᵀ(s)KᵀRKe(s)ds]
where in the first equality we used (38) and the tower propertyof conditional expectations and in the second equality weused (37) and (52).
Note that e(t) is described by (18). Due to the memorylessproperty of the exponential distribution, we have that
yk :=
∫ tk+1
tk
eᵀ(t)KᵀRKe(t)dt
are independent and identically distributed random variableswith finite expectation by assumption. By the same tokentk+1 − tk are independent and identically distributed randomvariables with expectation E[θ] which is finite by assumption.Then
∑N(T )−1k=0 yk is a renewal reward process as defined
in [26, Sec. 3.4] and from Prop. 3.41 in [26] (which buildsupon the strong law of large numbers) we conclude that
limT→∞
1
T
N(T )−1∑k=0
yk =E[y0]
E[t1 − t0]
provided that the expectations are finite, which implies that
limT→∞
1
TE[
N(T )−1∑k=0
∫ tk+1
tk
eᵀ(t)KᵀRKe(t)dt]
=1
E[θ]E[
∫ θ
0
eᵀ(t)KᵀRKe(t)dt]
(54)
We now divide both sides of (53) by T and take lim supT→∞on both sides. On the left-hand side we obtain the averagequadratic cost J . On the right-hand side, the second, and lastterm converge to zero, and considering the first and third termsand taking (54) into account we obtain the right hand sideof (23). To prove that the second term converges to zero, andtherefore conclude the proof, we prove now that
E[xᵀ(T )x(T )] ≤ C, for every T ∈ R≥0 (55)

To this effect, we will use (37). We start by noticing that, forxk := x(tk) and sk defined in (12),
E[
∫ tk+τk
tk
xᵀ(s)Qx(s) + uᵀ(s)Ru(s)ds|x(tk)]
≥ E[
∫ tk+sk
tk
xᵀ(s)Qx(s)ds|x(tk)]
≥ xᵀ(tk)E[
∫ b
0
e(A+BK)ᵀsQe(A+BK)sds]x(tk)
≥ δxᵀkxk ≥δ
cxᵀkPxk
for exponentially distributed b = sk − tk, some sufficientlysmall positive δ, and c is such that P ≤ cI , where we used thefact that Q is positive definite and that in the interval tk, tk+b,x(t) = (A + BK)x(t). Then, from (37) for τk = tk+1 − tkwe conclude that
E[xᵀk+1Pxk+1|xk] ≤ (1− δ
c)xᵀkPxk + d (56)
where c and δ can be picked such that 0 < (1 − δc ) < 1
and d = E[θ(ω)]tr(λWP ) + E[θ(ω)]gETC where gETC andE[θ(ω)] are finite by assumption. From (56) we can conclude,using (38) and the tower property of conditional expectations,that
E[xᵀk+1Pxk+1|x0] ≤ (1− δ
c)k+1E[xᵀ0Px0] + d
where d =∑k`=0(1− δ
c )`d converges to a constant d/(1− δc )
as k →∞. Using the fact that the covariance of the initial statex0 is finite, we conclude that E[xᵀkPxk] is uniformly boundedby a constant which depends on the distribution of the initialstate x0 and so is E[xᵀkxk] since P is positive definite. To seethat between times tk and tk+1, E[xᵀ(tk+s)Px(tk+s)] (andE[xᵀ(tk + s)x(tk + s)]) is uniformly bounded we use (37) forτk = min(a, θ(x(tk), . . . )), for any positive a concluding
E[xᵀ(tk + s)Px(tk + s)|x(tk)] ≤ (1− δ
c)xᵀkPxk + d,
for every s ∈ [0, tk+1 − tk) which concludes the proof.
PROOFS OF THEOREM 1 AND THEOREM 2
As mentioned after (17), whenever there is a transmissionthe following equality holds
ηα(τk) = f(τk). (57)
Moreover, due to our choice of α such that ξ = αE[θα] ≤ 1
we have that, for every k ∈ N0,
ξE[ηα(τk)] = ξE[ηα(θα)] = gETC (58)
Then, if we take expected values on both side of (57) andmultiply by ξ we obtain
gETC = ξE[f(θα)]. (59)
If f(h) = Ch, h = 0 and h = ∞ (assuming E[θα] < ∞)we conclude that gETC = ξCE[θα] and from Lemma 3 weconclude (26), establishing Theorem 2.
If we still assume that h = 0 and h =∞ (assuming E[θα] <∞) and let f be a concave function, we have from Jensen’s
inequality that E[f(θα)] ≤ f(E[θα]). Then, taking expectedvalues on both sides of (57), multiplying by ξ and using thisinequality we conclude gETC ≤ ξf(E[θα]) and from Lemma 3we conclude (25).
Consider now that h = 0 but h < ∞. We start bypartitioning the probability space Ω into two sets Ω3 and Ω4 asin (50) but now for α such that α ≤ E[θα]. For any realizationof disturbances ω ∈ Ω4 we have that (57) holds, whereas forω ∈ Ω3 we have that
ηα(h) ≤ f(h). (60)
Then, if we let c1 := Prob[Ω3], c2 := Prob[Ω4], c1 + c2 = 1we have
gETC
ξ= E[ηα(θα)] = E[ηα(θα)|ω ∈ Ω3]c1
+ E[ηα(θα)|ω ∈ Ω4]c2
≤ f(h)c1 + E[f(θα)|ω ∈ Ω4]c2
≤ f(h)c1 + f(E[θα|ω ∈ Ω4])c2
≤ f(hc1 + E[θα|ω ∈ Ω4]c2)
= f(E[θα])
where in the first inequality we used (60), in the secondand third inequalities we used Jensen’s inequality. Thus, fromLemma 3 we conclude (25).
The last part of the theorem follows from (18), since if thereare no disturbances the error e after a given transmission timetl remains equal to zero and no transmissions (before h) aregenerated.
PROOF OF THEOREM 3Considering the partition of the probability space (49),
letting c1 := Prob[Ω1], c2 := Prob[Ω2], and taking intoaccount that ξ = 1 we have
gETC = E[ηα(θα)] = E[ηα(h)1Ω1] + E[ηα(θα)1Ω2
]
≤ E[ηα(h)] + E[ηα(θα)1Ω2]
=h
αg(h) + E[f(θα)1Ω2
]
≤ g(h) + E[f(θα)1Ω2]
= E[f(h)1Ω1] + E[f(h)1Ω2
] + E[f(θα)1Ω2]
≤ f(E[h1Ω1] + E[θα1Ω2
]) + c2f(h)
= f(E[θα]) + c2g(h) ≤ f(E[θα]) + g(h)
where in the third and fourth inequalities we used Jensen’sinequality. Then, (29) follows from this inequality and fromLemma 3.
PROOF OF LEMMA 4To obtain the upper bound, note that f(t) ≤ g(h) for every
t ∈ (h, h) and therefore ξE[f(θα)] ≤ g(h). Then, using (58),
gETC = ξE[ηα(θα)] = ξE[f(θα)] ≤ g(h).
To obtain the lower bound note that E[ηα(θα)] ≥ ηα(h) sinceηα(β) is an increasing function of β and θα ≥ h. Then,using (58),
gETC = ξE[ηα(θα)] ≥ ξηα(h) =ξh
αg(h)

and the inequalities (30) follow from these derivations andfrom Lemma 3.
PROOF OF LEMMA 5
Note that f(t) ≤ Cε for every t ≥ 0 and thereforeE[f(θα)] ≤ Cε. Then
gETC = ξE[ηα(θα)] = ξE[f(θα)] ≤ ξCε
and the inequality (30) follow from this inequality and fromLemma 3.
PROOF OF THEOREM 4
The proof is a special case of the proof of (55) in the contextof Lemma 3 since the proposed policy for the scheduler (17)meets the description (22).
REFERENCES
[1] Y. Xu and J. P. Hespanha, “Optimal communication logics in networkedcontrol systems,” in 43rd IEEE Conference on Decision and Control(CDC), vol. 4, Dec 2004, pp. 3527–3532 Vol.4.
[2] A. Molin and S. Hirche, “On the optimality of certainty equivalencefor event-triggered control systems,” IEEE Transactions on AutomaticControl, vol. 58, no. 2, pp. 470–474, Feb 2013.
[3] ——, “Structural characterization of optimal event-based controllers forlinear stochastic systems,” in 49th IEEE Conference on Decision andControl (CDC), dec. 2010, pp. 3227 –3233.
[4] C. Ramesh, H. Sandberg, L. Bao, and K. H. Johansson, “On thedual effect in state-based scheduling of networked control systems,” inAmerican Control Conference (ACC), 2011, June 2011, pp. 2216–2221.
[5] K. J. Astrom and B. M. Bernhardsson, “Comparison of Riemann andLebesgue sampling for first order stochastic systems,” in Proceedings ofthe 41st IEEE Conference on Decision and Control (CDC), vol. 2, dec.2002, pp. 2011 – 2016 vol.2.
[6] X. Meng and T. Chen, “Optimal sampling and performance comparisonof periodic and event based impulse control,” IEEE Transactions onAutomatic Control, vol. 57, no. 12, pp. 3252 –3259, dec. 2012.
[7] R. Cogill, S. Lall, and J. Hespanha, “A constant factor approximationalgorithm for event-based sampling,” in American Control Conference,2007. ACC ’07, july 2007, pp. 305 –311.
[8] R. Cogill, “Event-based control using quadratic approximate valuefunctions,” in 48th IEEE Conference on Decision and Control, heldjointly with the 28th Chinese Control Conference. CDC/CCC., dec. 2009,pp. 5883 –5888.
[9] J. Araujo, A. Teixeira, E. Henriksson, and K. H. Johansson, “A down-sampled controller to reduce network usage with guaranteed closed-loopperformance,” in 53rd IEEE Conference on Decision and Control, Dec2014, pp. 6849–6856.
[10] D. Antunes and W. P. M. H. Heemels, “Rollout event-triggered control:Beyond periodic control performance,” IEEE Transactions on AutomaticControl, vol. 59, no. 12, pp. 3296–3311, Dec 2014.
[11] W. Wu, S. Reimann, D. Gorges, and S. Liu, “Suboptimal event-triggered control for time-delayed linear systems,” IEEE Transactionson Automatic Control, vol. 60, no. 5, pp. 1386–1391, May 2015.
[12] B. Demirel, V. Gupta, D. E. Quevedo, and M. Johansson, “On the trade-off between communication and control cost in event-triggered dead-beatcontrol,” IEEE Transactions on Automatic Control, vol. PP, no. 99, pp.1–1, 2016.
[13] K. Gatsis, A. Ribeiro, and G. J. Pappas, “State-based communicationdesign for wireless control systems,” in 55th IEEE Conference onDecision and Control (CDC), Dec 2016, pp. 129–134.
[14] D. J. Antunes and B. A. Khashooei, “Consistent event-triggered methodsfor linear quadratic control,” in 55th IEEE Conference on Decision andControl (CDC), Dec 2016, pp. 1358–1363.
[15] D. Antunes, “Event-triggered control under poisson events: the role ofsporadicity,” in Proc. 4th IFAC Workshop Estimation and Control ofNetworked Systems, vol. 4, no. 1, 2013, pp. 269–276.
[16] J. Lunze and D. Lehmann, “A state-feedback approach to event-basedcontrol,” Automatica, vol. 46, no. 1, pp. 211 – 215, 2010.
[17] P. Tabuada, “Event-triggered real-time scheduling of stabilizing controltasks,” IEEE Transactions on Automatic Control, vol. 52, no. 9, pp.1680–1685, Sept 2007.
[18] A. Girard, “Dynamic triggering mechanisms for event-triggered control,”IEEE Transactions on Automatic Control, vol. 60, no. 7, pp. 1992–1997,July 2015.
[19] V. S. Dolk, D. P. Borgers, and W. P. M. H. Heemels, “Output-basedand decentralized dynamic event-triggered control with guaranteed lp-gain performance and zeno-freeness,” IEEE Transactions on AutomaticControl, vol. PP, no. 99, pp. 1–1, 2016.
[20] R. Brockett, “Stochastic control,” Lecture Notes, Harvard University,2009.
[21] J. P. Hespanha, “A model for stochastic hybrid systems with applicationto communication networks,” Nonlinear Analysis: Theory, Methods andApplications, vol. 62, no. 8, pp. 1353 – 1383, 2005.
[22] M. Davis, Linear Estimation and Stochastic Control. Chapman andHall Mathematics Series, 1977.
[23] K. Astrom, Introduction to stochastic control theory. Academic press,New York and London, 1970.
[24] M. H. A. Davis, Markov Models and Optimization. London, UK:Chapman & Hall, 1993.
[25] J. C. Geromel, G. S. Deaecto, and J. Daafouz, “Suboptimal switchingcontrol consistency analysis for switched linear systems,” IEEE Trans-actions on Automatic Control, vol. 58, no. 7, pp. 1857–1861, July 2013.
[26] S. I. Resnick, Adventures in stochastic processes. Basel, Switzerland,Switzerland: Birkhauser Verlag, 1992.
[27] W. Heemels, M. Donkers, and A. Teel, “Periodic event-triggered controlfor linear systems,” IEEE Transactions on Automatic Control, vol. 58,no. 4, pp. 847–861, 2013.
[28] D. J. Antunes and M. Balaghiinaloo, “Consistent event-triggered controlfor discrete-time linear systems with partial state information,” 2017,submitted.
[29] B. Demirel, E. Ghadimi, D. E. Quevedo, and M. Johansson, “Optimalcontrol of linear systems with limited control actions: threshold-basedevent-triggered control,” to appear, available at https://arxiv.org/pdf/1701.04871.pdf , 2017.
[30] T. Gommans, T. Theunisse, D. Antunes, and W. Heemels, “Resource-aware MPC for constrained linear systems: Two rollout approaches,”Journal of Process Control, vol. 51, pp. 68 – 83, March 2017.
[31] D. J. Antunes and B. A. Khashooei, “A consistent dynamic event-triggered policy for linear quadratic control: supplementary material,”2016. [Online]. Available: http://www.dct.tue.nl/New/Antunes/reports/AntAsa16.pdf
[32] B. D. O. Anderson and J. B. Moore, Optimal Control: Linear QuadraticMethods. Englewood Cliffs, New Jersey: Prentice Hall, 1990.
[33] G. Gripenberg, S. O. Londen, and O. Staffans, Volterra Integral andFunctional Equations. Cambridge University Press, 1990.
Duarte Antunes was born in Viseu, Portugal, in1982. He received the Licenciatura in Electrical andComputer Engineering from the Instituto SuperiorTecnico (IST), Lisbon, in 2005. He did his PhD from2006 to 2011 in the research field of Automatic Con-trol at the Institute for Systems and Robotics, IST,Lisbon. From 2011 to 2013 he held a postdoctoralposition at the Eindhoven University of Technology(TU/e). He is currently an Assistant Professor atthe Department of Mechanical Engineering of TU/e.His research interests include Networked Control
Systems, Stochastic Control, Dynamic Programming, and Systems Biology.
Behnam Asadi Khashooei was born on June 26,1987, in Tehran, Iran. He received his Bachelorof Science (with honors) and Master of Science(with honors) degrees from the department of Elec-trical and Computer Engineering (ECE) at IsfahanUniversity of Technology (IUT), Isfahan, Iran, in2009 and 2012, respectively. Since April 2013, heis pursuing his PhD studies within Control SystemsTechnology group of the department of MechanicalEngineering at Eindhoven University of Technology(TU/e), Eindhoven, The Netherlands. His research
interests are hybrid dynamical systems, optimal control, stochastic controland networked control systems.