Embed Size (px)
Citation preview
Computational Studies of Horizontal Axis Wind Turbines
Ph.D. Oral Defense
Presented By
Guanpeng XuAdvisor: Dr. L Sankar
School of Aerospace EngineeringGeorgia Institute of Technology
This work was supported by NRELMonitor: Dr. Scott Schreck
Georgia Tech School of Aerospace Engineering
Outline of the Presentation
• Importance of wind energy
• Overview of the present research
• Methodology and numerical procedure
• Results and discussions
• Conclusions and recommendations
Georgia Tech School of Aerospace Engineering
Importance of Wind Energy
• Wind Energy is a clean source of energy.
• Wind Energy is renewable.
• It may be used to augment to other forms of energy,
e.g. fossil fuel.
• Many parts of US and other countries have sites
with high wind, making wind energy based power
generation feasible.
Georgia Tech School of Aerospace Engineering
Existing Approaches for Wind Turbine Performance
• Blade Element Methods– 2-D strip theory – Analytical inflow – Fast and is in routine use – Require table look up for airfoil data– Modeling tip losses and 3-D stall effects remain unsolved
issues • Navier-Stokes Simulations
– Can capture all the physics from first principles– Can provide high-quality details of the flow field– Require large computer time
• Hybrid Methods
Georgia Tech School of Aerospace Engineering

Hybrid Methodology
• The flow field is made of
– a viscous region near the blade(s)
– A potential flow region that propagates the blade circulation and thickness effects to the far field
– A Lagrangean representation of the tip vortex, and concentrated vorticity shed from nearby bluff bodies such as the tower
• This method is unsteady, compressible, and does not have singularities near separation lines
N-S zone
Potential Flow Zone Tip Vortex
Georgia Tech School of Aerospace Engineering
A hybrid technique offers the following capabilities:
• It can capture viscous phenomena efficiently.• Tip vortex is modeled accurately.• There is no need for analytical inflow models.• It is applicable to steady and unsteady HAWT
applications.• High order accuracy solutions are obtained with
small CPU time.
Hybrid Solver Versus Others
Georgia Tech School of Aerospace Engineering
Georgia Tech School of Aerospace Engineering
Incorporation of Tower Effects
– Body-fitted grids are used for rotating
blades and tower.
– Each grid block is simulated using either a
Navier-Stokes or hybrid method.
– The flow fields among the grid sets are
linked by 3-D interpolation.
•Inclusion of tower effects requires modeling non-rotating and rotating components.
•Georgia Tech CHIMERA methodology has been modified for tower shadow effects of HAWT :
Mathematical FormulationMathematical Formulation
Reynolds Averaged Navier-Stokes Equations in Finite Volume Representation:
t
qdV Eˆ i Fˆ j Gˆ k n dS Rˆ i Sˆ j T ˆ k n dS
Where q is the state vector. E, F, and G are the inviscid fluxes, and R, S, and T are the viscous fluxes
•A finite volume formulation using Roe’s scheme is used.
•The scheme is third order or fifth order accurate in space and second order accurate in time.
Georgia Tech School of Aerospace Engineering
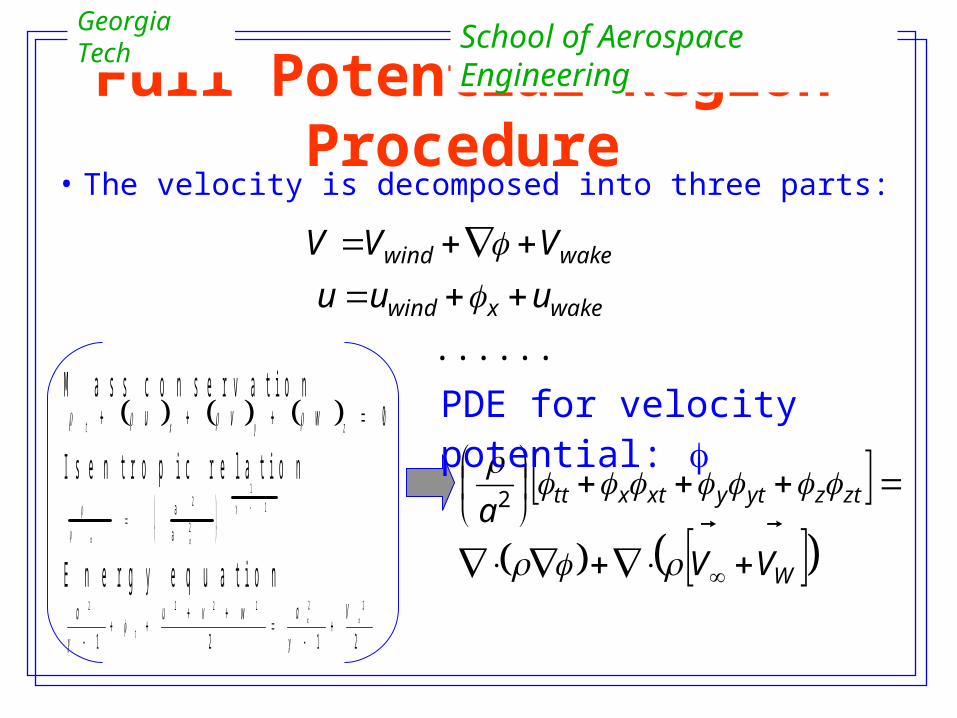
Full Potential Region Procedure• The velocity is decomposed into three parts:
W
ztzytyxtxtt
VV
a
2
M a s s c o n s e r v a t i o n 0 zyxt wvu
I s e n t r o p i c r e l a t i o n
a 2
a 2
1 1
E n e r g y e q u a t i o n
2121
222222
Vawvua
t
PDE for velocity potential:
......wakexwind
wakewind
uuu
VVV
Georgia Tech School of Aerospace Engineering
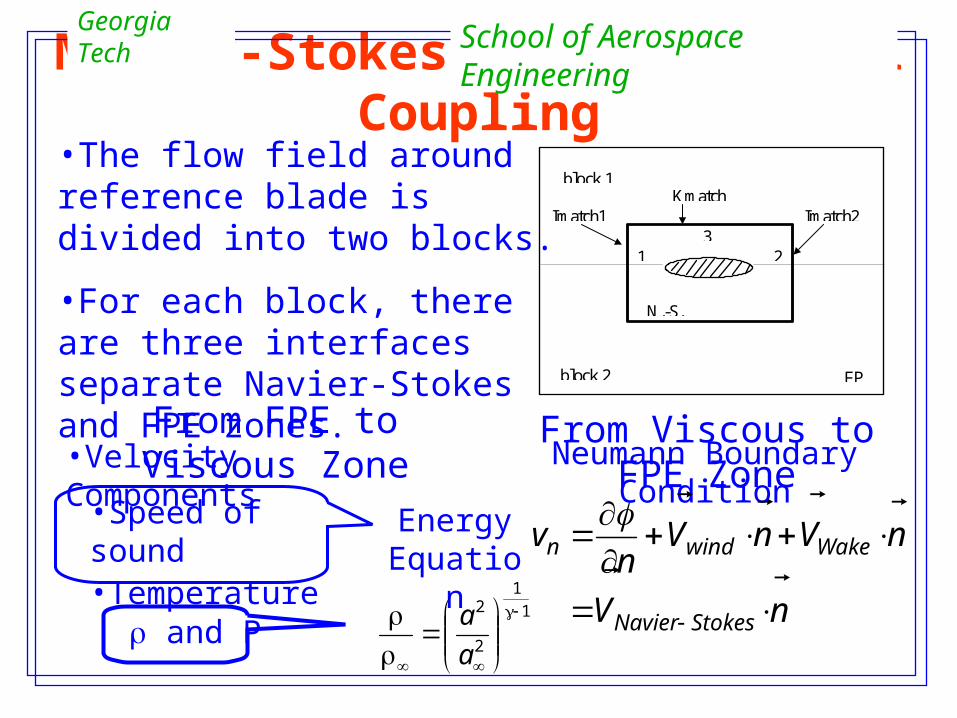
Navier-Stokes/Full Potential Coupling
N.-S.
FP
Kmatch
block 2
block 1
1 23
Imatch1 Imatch2
•The flow field around reference blade is divided into two blocks.
•For each block, there are three interfaces separate Navier-Stokes and FPE zones.
From FPE to Viscous Zone From Viscous to FPE Zone•Velocity Components
•Speed of sound•Temperature
Energy Equation
and P1
1
2
2
a
a
Neumann Boundary Condition
nV
nVnVn
v
StokesNavier
Wakewindn
Georgia Tech School of Aerospace Engineering
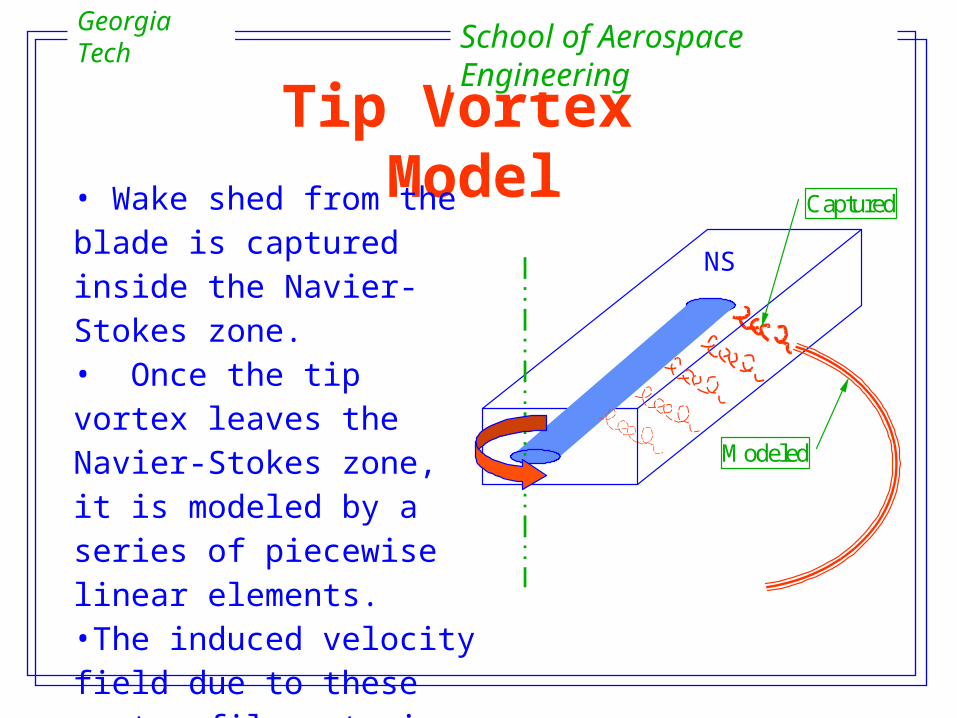
Tip Vortex Model
• Wake shed from the blade is captured inside the Navier-Stokes zone.• Once the tip vortex leaves the Navier-Stokes zone, it is modeled by a series of piecewise linear elements. •The induced velocity field due to these vortex filaments is calculated by Biot-Savart law where needed.
Georgia Tech School of Aerospace Engineering
NS
Captured
Modeled

Turbulence Model Used
Georgia Tech School of Aerospace Engineering
•Algebraic, Prandtl’s mixing-length like model called Baldwin-Lomax model
–Simple–fast–is not valid in massively separated flows
•One equation transport model called Spalart-Allmaras model for an eddy-viscosity like quantity
–robust–more time consuming–in wide use for separated and unsteady flows
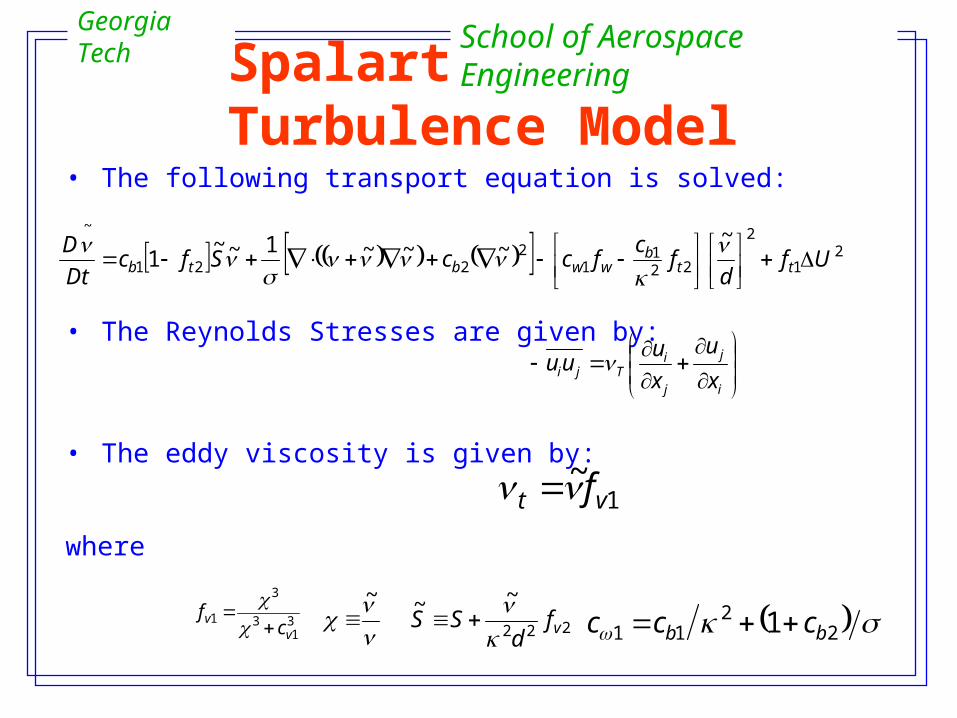
Spalart-Allmaras Turbulence Model• The following transport equation is solved:
• The Reynolds Stresses are given by:
• The eddy viscosity is given by:
where
21
2
221
12
221
~ ~~~~1~~
1 Ufd
fc
fccSfcDt
Dtt
bwwbtb
i
j
j
iTji x
u
x
uuu
1~
vt f
31
3
3
1v
vc
f
~
222
~~vf
dSS
22
11 1 bb ccc
Georgia Tech School of Aerospace Engineering
Eppler’s Transition Model
• Transition occurs when
where r is a roughness parameter.
• H32 is the ratio of the energy thickness to the momentum thickness .
rHue 34.074.214.18log 32
***
0
0
2
32
1
1
dyuu
uu
dyuu
uu
H
ee
ee
Georgia Tech School of Aerospace Engineering
Michel’s Model
46.0224001174.1 x
x
RR
R
This model is in wide use in fixed wing aircraft industry.
Reynolds No. based on momentum thickness
Reynolds Number based on distance from leading
edge=u x/
x
xe
trtrtr u
dxxxGexp1
tr
etrtr
xuRxRxfG
,
•Transition Region is simulated by:
Georgia Tech School of Aerospace Engineering
•Local impinging velocities are used.
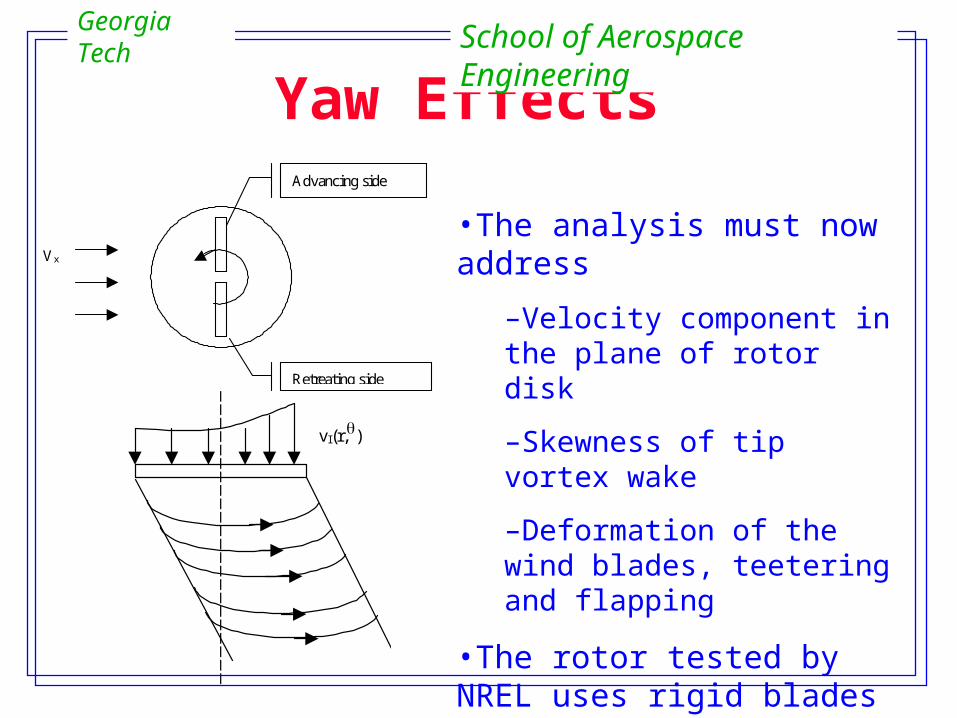
Vx
Advancing side
Retreating side
vI(r,)
Yaw Effects
•The analysis must now address
–Velocity component in the plane of rotor disk
–Skewness of tip vortex wake
–Deformation of the wind blades, teetering and flapping
•The rotor tested by NREL uses rigid blades
Georgia Tech School of Aerospace Engineering
Validation Studies
• Axial Wind Conditions
• Yaw Conditions
• Tower Interaction Effects
Georgia Tech School of Aerospace Engineering
Extraction of Physics
•Examination of flow field, transition lines and blade loads
•Examination of wake state
•Examination and improvement of tip loss models using CFD results as a guide
•Examination of stall delay models using CFD results as a guide
Validation Studies (I)
• NREL has collected extensive performance data for three rotor configurations:– A rotor with rectangular planform, untwisted blade and S-809
airfoil sections, called the Phase II Rotor
– A twisted rotor, with rectangular planform and S-809
sections, called the Phase III Rotor
– A two bladed, tapered and twisted rotor, called the Phase VI
Rotor. Best quality measurements (wind tunnel) are available.
Georgia Tech School of Aerospace Engineering
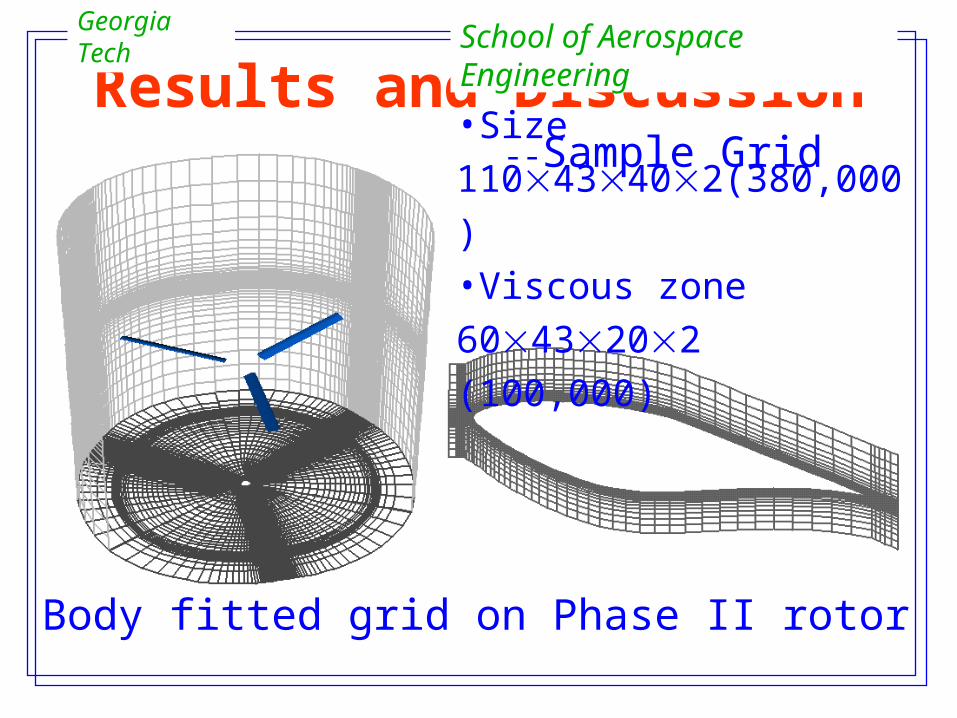
Results and Discussion--Sample Grid
Body fitted grid on Phase II rotor
•Size
11043402(380,000)•Viscous zone 6043202
(100,000)
Georgia Tech School of Aerospace Engineering
-10
-5
0
5
10
15
20
0 5 10 15 20 25Wind Speeds[m/s]
Gen
erat
or
Po
wer
[kw
]
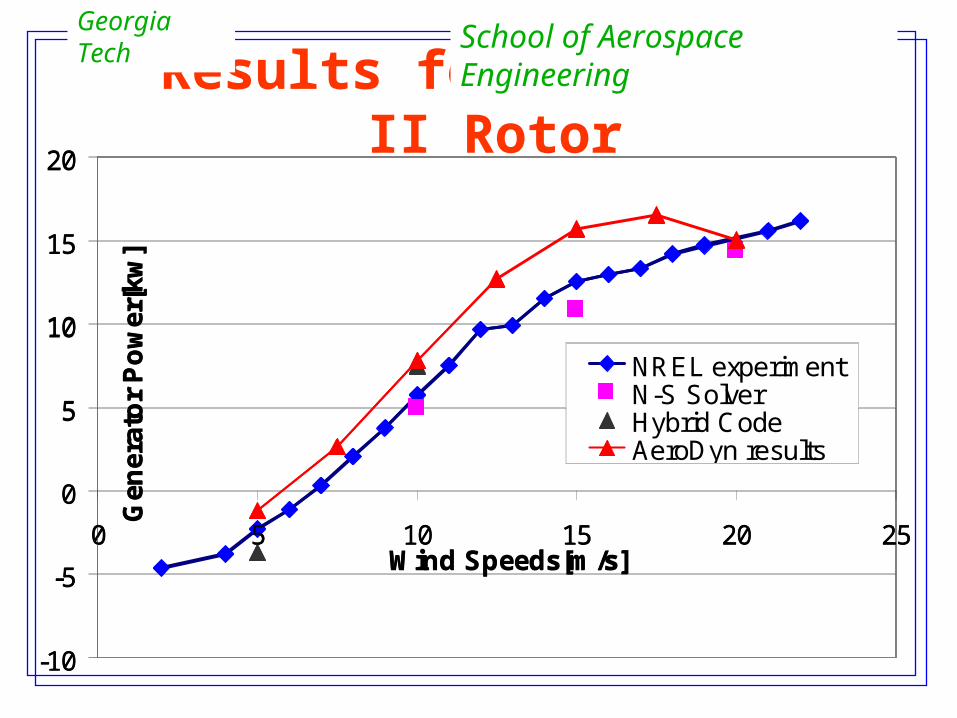
NREL experimentN-S SolverHybrid CodeLifting Line results
-10
-5
0
5
10
15
20
0 5 10 15 20 25Wind Speeds[m/s]
Gen
erat
or
Po
wer
[kw
]
NREL experimentN-S SolverHybrid CodeAeroDyn results
Results for the Phase II Rotor
Georgia Tech School of Aerospace Engineering
0
5
10
15
20
0 5 10 15 20
Wind Speed[m/s]
Gen
erat
or
Po
wer
[kw
]
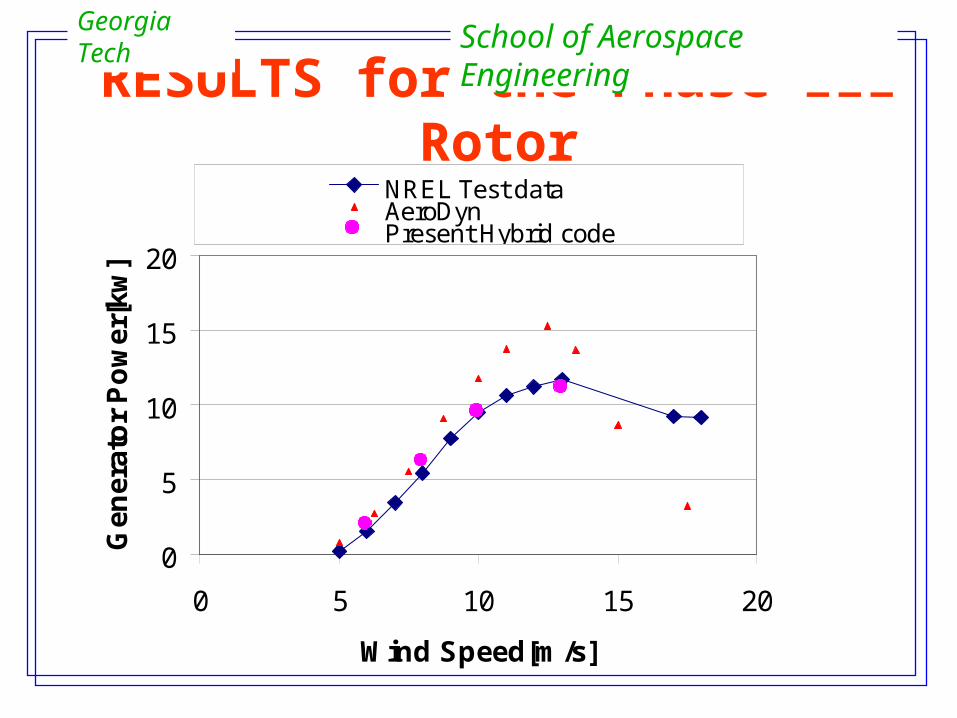
NREL Test dataAeroDynPresent Hybrid code
RESULTS for the Phase III Rotor
Georgia Tech School of Aerospace Engineering

The Hybrid Code Converges Rapidly (7 seconds/iteration on a SGI Octane 2 Workstation)
0
4
8
12
16
20
0 1000 2000 3000 4000 5000Iterations of code
Po
we
r(k
w)
6 m/s
10 m/s
8 m/s
Georgia Tech School of Aerospace Engineering
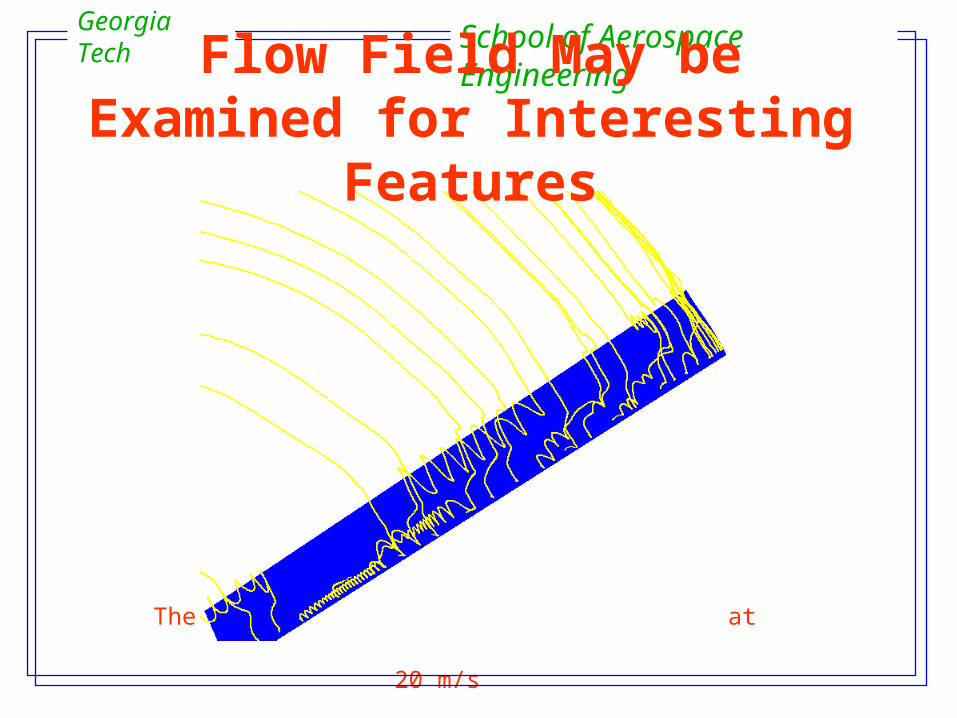
The Upper Surface of the Phase II Rotor at 20 m/s
Georgia Tech School of Aerospace Engineering
Flow Field May be Examined for Interesting Features
-3
-2
-1
0
1
2
3
0 2 4 6 8 10 12
0_eqn;Eppler0_eqn; Michel
1_eqn; Eppler1_eqn; Michel
Root Tip
Leading Edge WR
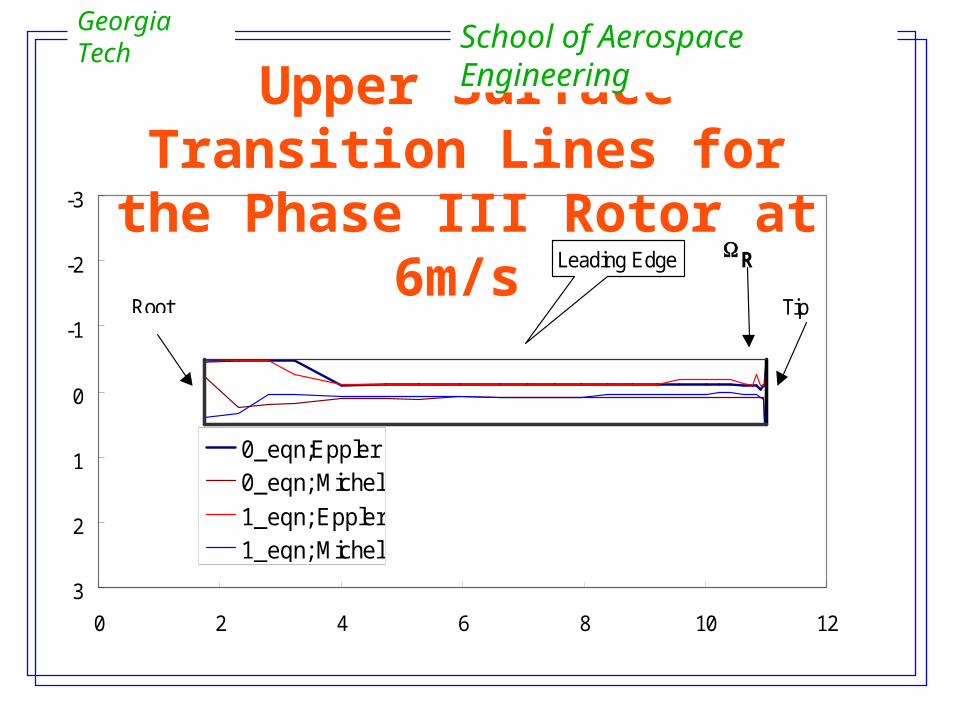
Upper Surface Transition Lines for the Phase III Rotor at 6m/s
Georgia Tech School of Aerospace Engineering
-3
-2
-1
0
1
2
3
0 2 4 6 8 10 12
0_eqn;Eppler
0_eqn; Michel
1_eqn; Eppler
1_eqn; Michel
Root Tip
Leading Edge
WR
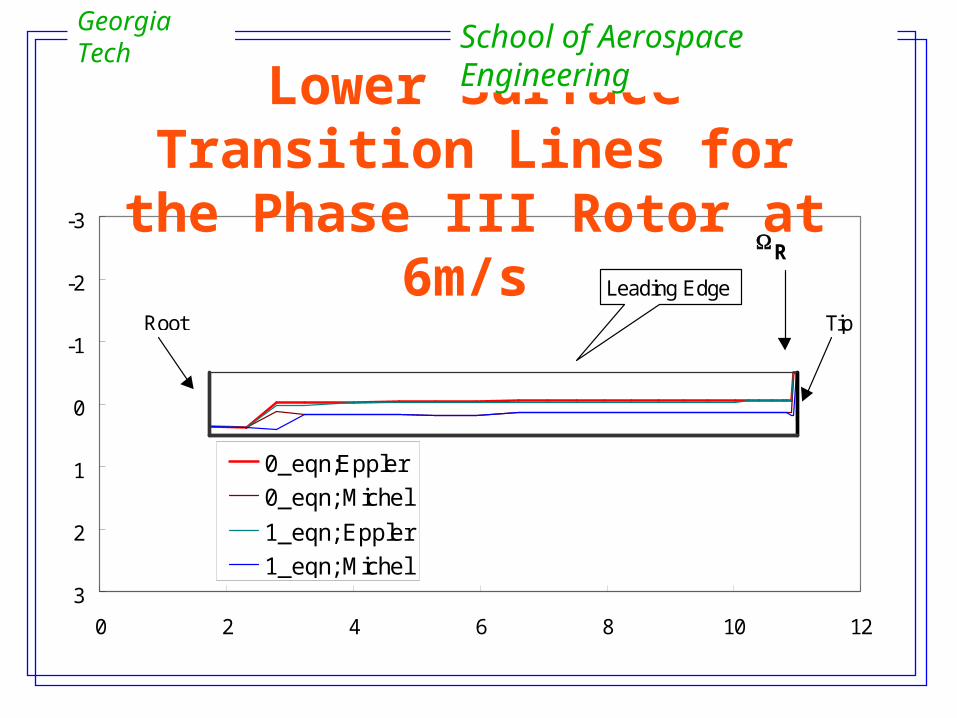
Lower Surface Transition Lines for the Phase III Rotor at 6m/s
Georgia Tech School of Aerospace Engineering
Performance of Transition and Turbulence Models
•Eppler’s model predicts a transition location that is slightly upstream of Michel’s predictions, unless if there is a laminar separation bubble.
•On the lower surface, the pressure gradients tend to be more favorable than on the upper side. This leads to a thinner boundary layer and transition aft of the 40% chord.
•The Reynolds number near the root is less than 105. Both models predict that the lower surface flow will remain laminar all the way to the trailing edge, near the root region.
•Transition line location appears insensitive to the turbulence model used.
Georgia Tech School of Aerospace Engineering
Georgia Tech School of Aerospace Engineering
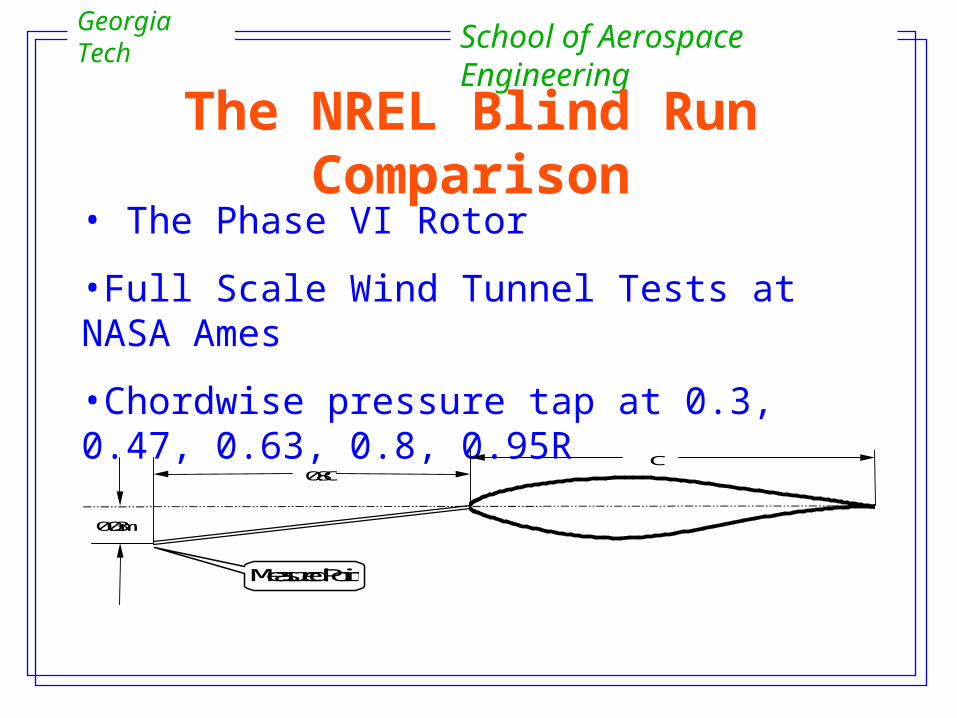
The NREL Blind Run Comparison
• The Phase VI Rotor
•Full Scale Wind Tunnel Tests at NASA Ames
•Chordwise pressure tap at 0.3, 0.47, 0.63, 0.8, 0.95R-0.5
0.5
0.8C
0.03m
C
Measured Point
Georgia Tech School of Aerospace Engineering
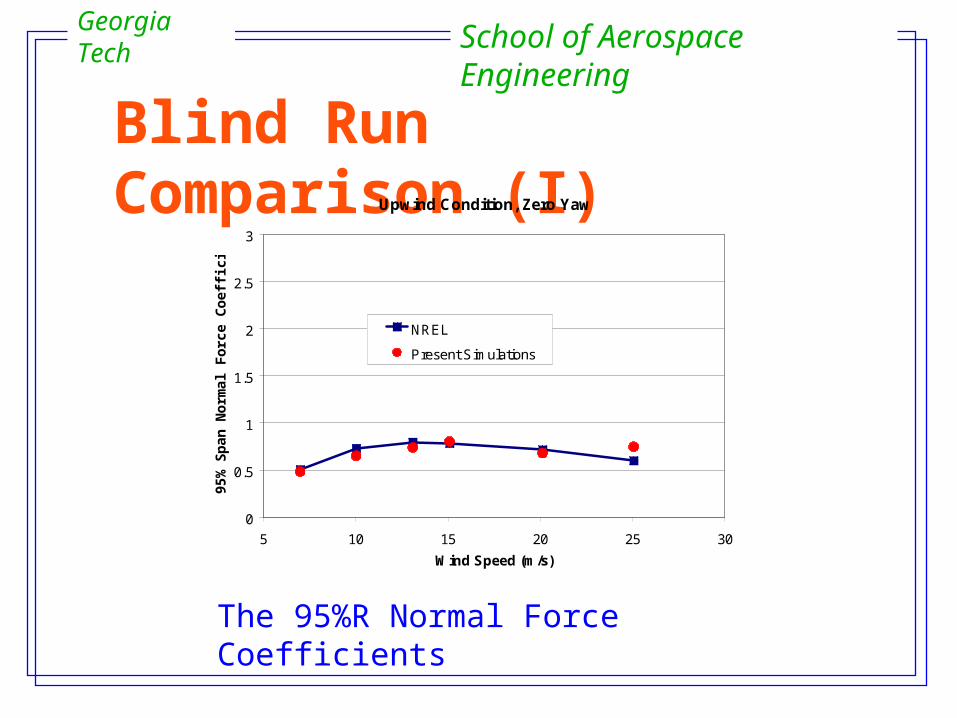
Blind Run Comparison (I)Upwind Condition, Zero Yaw
0
0.5
1
1.5
2
2.5
3
5 10 15 20 25 30
Wind Speed (m/s)
95%
Sp
an N
orm
al F
orc
e C
oef
fici
ent
NREL
Present Simulations
The 95%R Normal Force Coefficients
Georgia Tech School of Aerospace Engineering
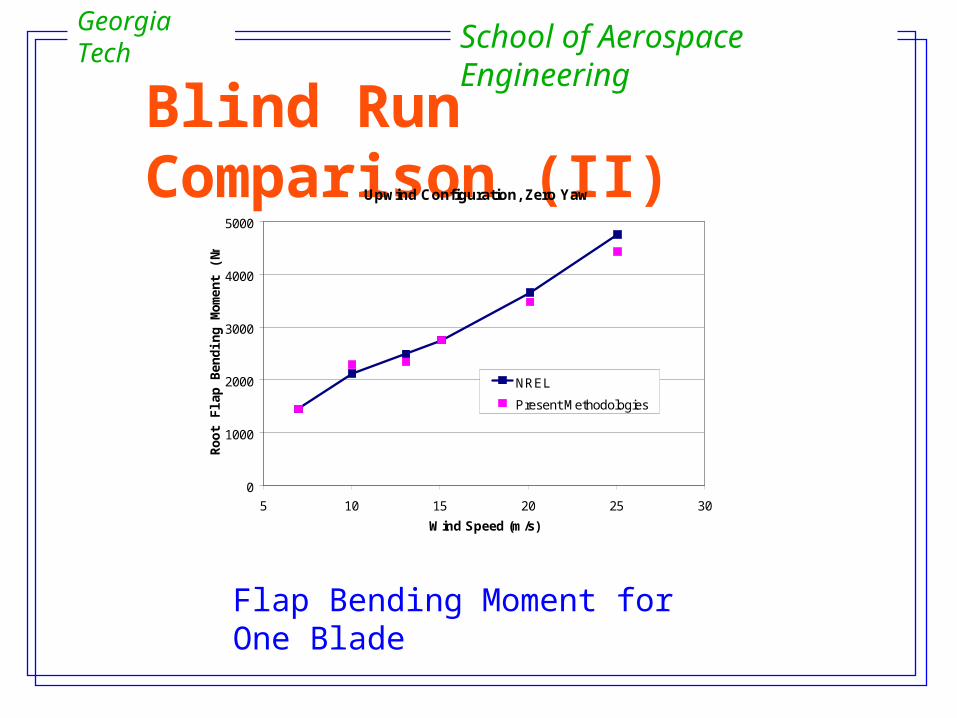
Blind Run Comparison (II)Upwind Configuration, Zero Yaw
0
1000
2000
3000
4000
5000
5 10 15 20 25 30
Wind Speed (m/s)
Ro
ot
Fla
p B
end
ing
Mo
men
t (N
m)
NREL
Present Methodologies
Flap Bending Moment for One Blade
Georgia Tech School of Aerospace Engineering
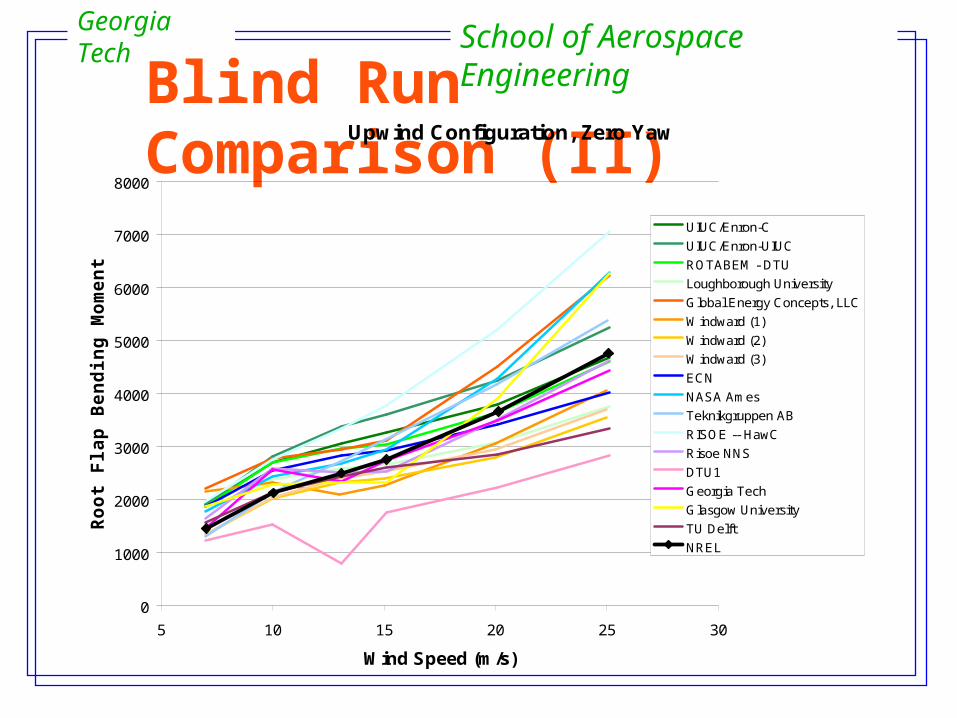
Blind Run Comparison (II)Upwind Configuration, Zero Yaw
0
1000
2000
3000
4000
5000
6000
7000
8000
5 10 15 20 25 30
Wind Speed (m/s)
Ro
ot
Fla
p B
en
din
g M
om
en
t (N
m)
UIUC/Enron-C
UIUC/Enron-UIUC
ROTABEM - DTU
Loughborough University
Global Energy Concepts, LLC
Windward (1)
Windward (2)
Windward (3)
ECN
NASA Ames
Teknikgruppen AB
RISOE -- HawC
Risoe NNS
DTU1
Georgia Tech
Glasgow University
TU Delft
NREL
Georgia Tech School of Aerospace Engineering
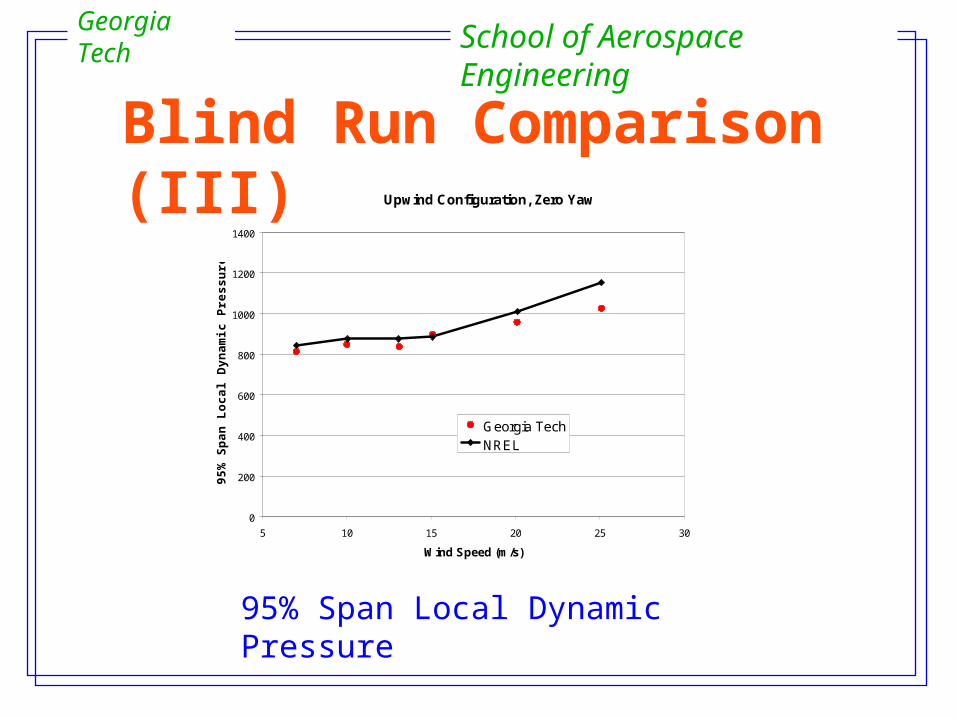
Blind Run Comparison (III)Upwind Configuration, Zero Yaw
0
200
400
600
800
1000
1200
1400
5 10 15 20 25 30
Wind Speed (m/s)
95
% S
pa
n L
oc
al
Dy
na
mic
Pre
ss
ure
(P
a)
Georgia TechNREL
95% Span Local Dynamic Pressure
Validation Studies
• Axial Wind Conditions
• Yaw Conditions
• Tower Interaction Effects
Georgia Tech School of Aerospace Engineering
Extraction of Physics
•Examination of flow field, transition lines and blade loads
•Examination of wake state
•Examination and improvement of tip loss models using CFD results as a guide
•Examination of stall delay models using CFD results as a guide
Yaw Simulations
Georgia Tech School of Aerospace Engineering
•Field data is often unreliable because of constantly shifting wind conditions.
•Phase VI data is highly reliable, but unfortunately was not available till towards the end of this research.
•For these reasons, the present simulations have not been validated in the strictest sense, but do give useful insight into yaw effects.
8.0
8.5
9.0
9.5
10.0
10.5
11.0
11.5
0 2 4 6 8 10 12 14 16
Time(sec)
Me
asu
red
Win
d S
pe
ed
Inflow wind(3)inflow wind(4)
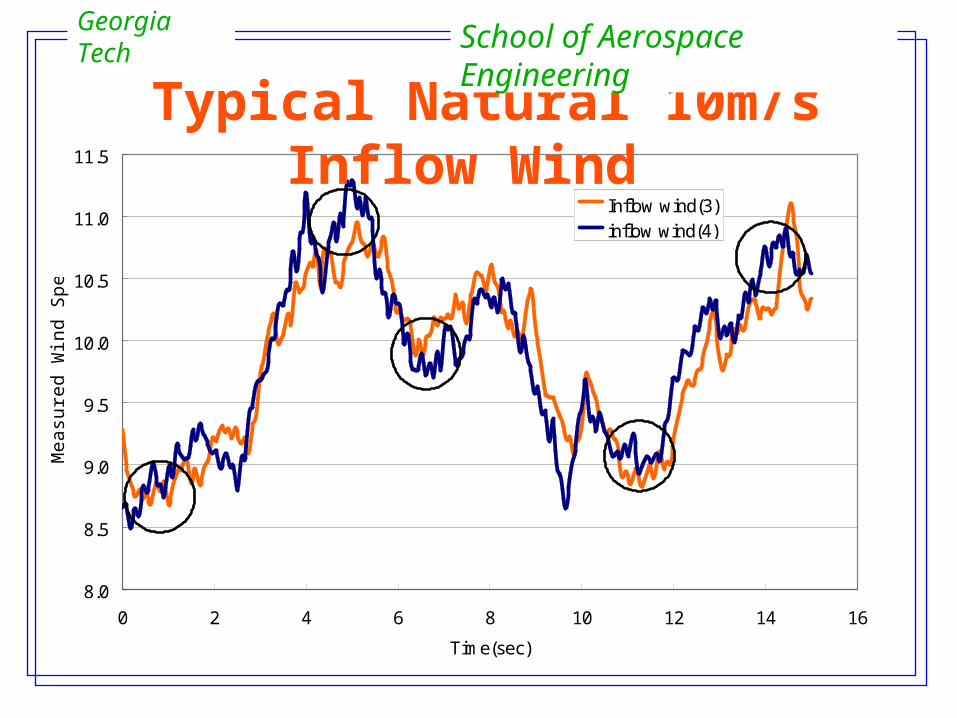
Typical Natural 10m/s Inflow Wind
Georgia Tech School of Aerospace Engineering
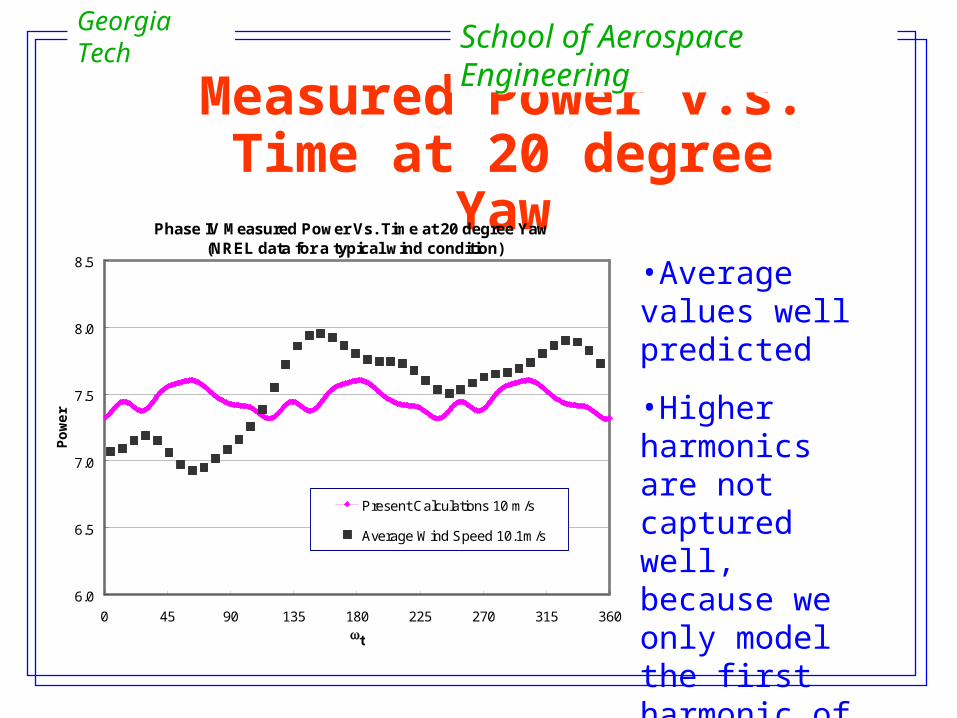
Measured Power v.s. Time at 20 degree Yaw
Georgia Tech School of Aerospace Engineering
Phase IV Measured Power Vs. Time at 20 degree Yaw (NREL data for a typical wind condition)
6.0
6.5
7.0
7.5
8.0
8.5
0 45 90 135 180 225 270 315 360
t
Po
we
r
Present Calculations 10 m/s
Average Wind Speed 10.1m/s
•Average values well predicted
•Higher harmonics are not captured well, because we only model the first harmonic of the wind.
Validation Studies
• Axial Wind Conditions
• Yaw Conditions
• Tower Interaction Effects
Georgia Tech School of Aerospace Engineering
Extraction of Physics
•Examination of flow field, transition lines and blade loads
•Examination of wake state
•Examination and improvement of tip loss models using CFD results as a guide
•Examination of stall delay models using CFD results as a guide
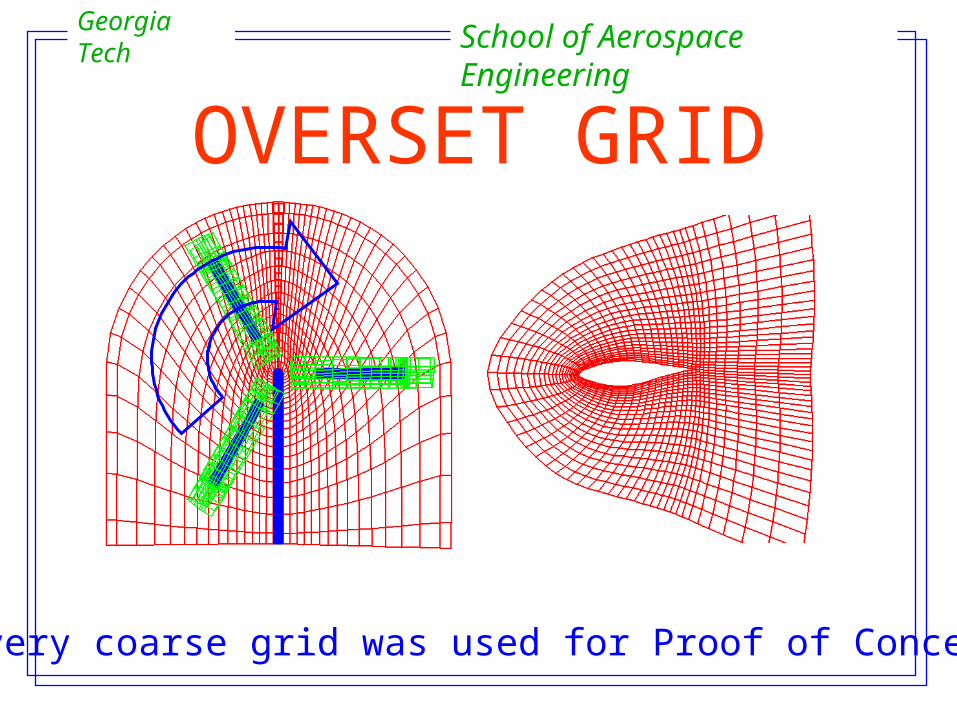
OVERSET GRID
A very coarse grid was used for Proof of Concept
Georgia Tech School of Aerospace Engineering
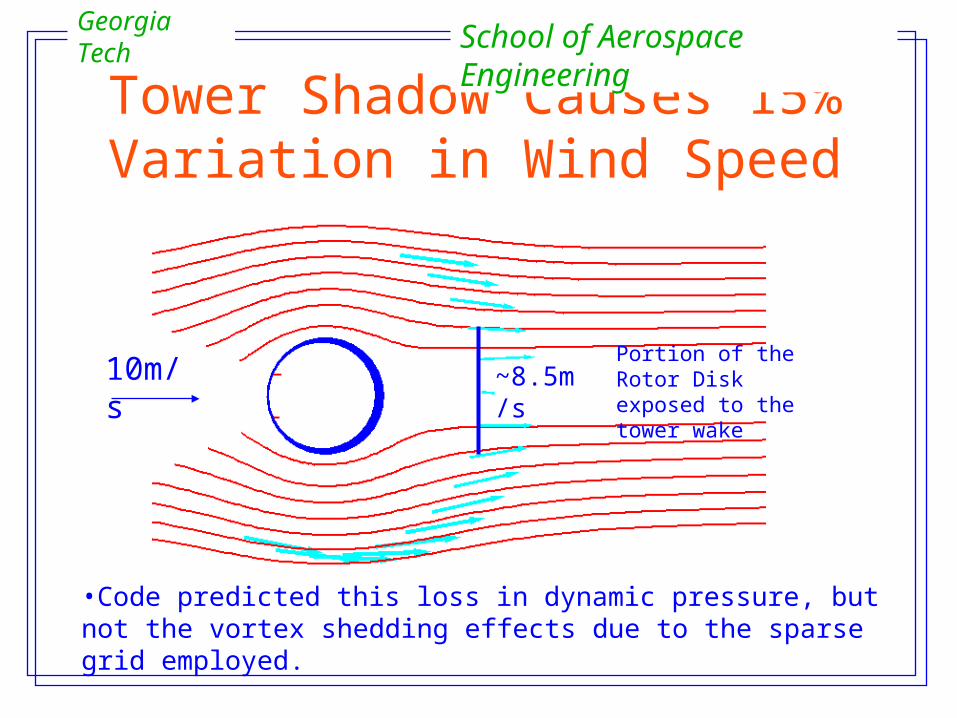
Portion of the Rotor Disk exposed to the tower wake
Tower Shadow Causes 15% Variation in Wind Speed
Georgia Tech School of Aerospace Engineering
10m/s ~8.5m/s
•Code predicted this loss in dynamic pressure, but not the vortex shedding effects due to the sparse grid employed.
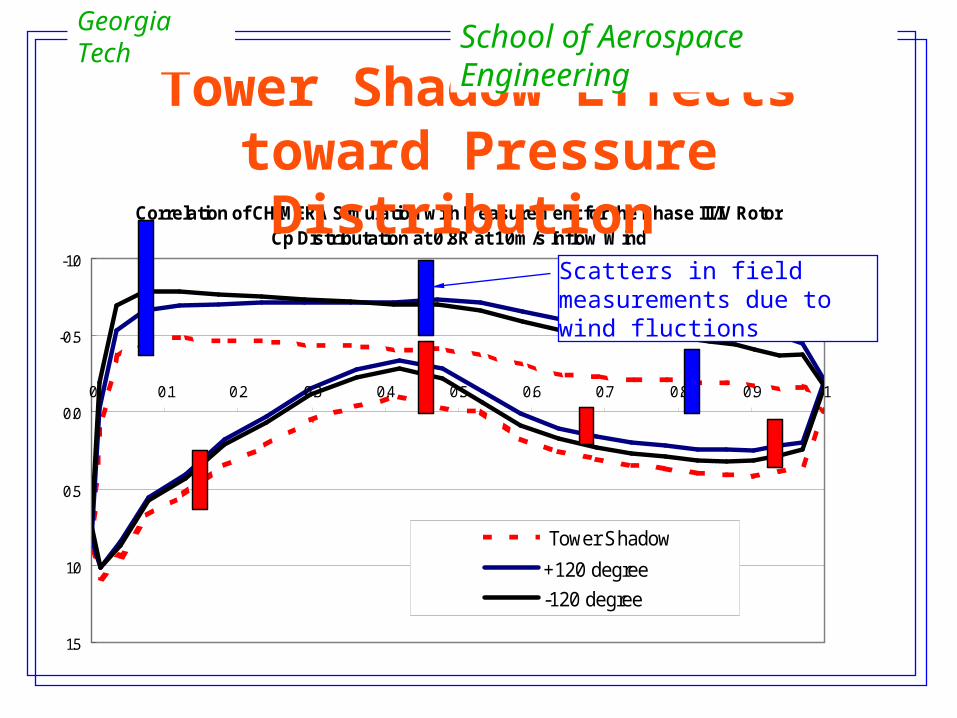
Correlation of CHIMERA Simulation with Measurement for the Phase III/IV RotorCp Distributation at 0.8R at 10m/s Inflow Wind
-1.0
-0.5
0.0
0.5
1.0
1.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Tower Shadow
+120 degree
-120 degree
Tower Shadow Effects toward Pressure Distribution
Georgia Tech School of Aerospace Engineering
Scatters in field measurements due to wind fluctions

Validation Studies
• Axial Wind Conditions
• Yaw Conditions
• Tower Interaction Effects
Georgia Tech School of Aerospace Engineering
Extraction of Physics
•Examination of flow field, transition lines and blade loads
•Examination of wake state
•Examination and improvement of tip loss models using CFD results as a guide
•Examination of stall delay models using CFD results as a guide

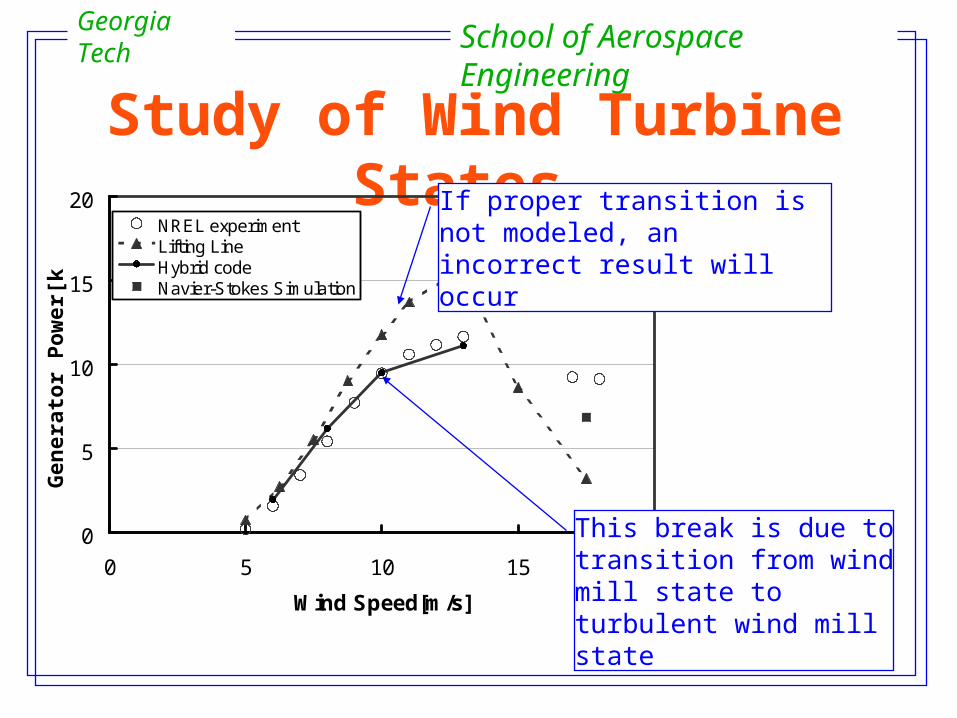
Study of Wind Turbine States
•Wind Turbine States includes: Propeller, zero-slip,windmill, turbulent windmill, vortex ring, and propeller brake states.
•The present method models all these states well.
•Ignoring transition from one state to another will lead to incorrect performance predictions.
Georgia Tech School of Aerospace Engineering
Study of Wind Turbine States
0
5
10
15
20
0 5 10 15 20
Wind Speed[m/s]
Gen
erat
or
Po
wer
[kw
]
NREL experimentLifting LineHybrid codeNavier-Stokes Simulation
This break is due to transition from wind mill state to turbulent wind mill state
If proper transition is not modeled, an incorrect result will occur
Georgia Tech School of Aerospace Engineering
Validation Studies
• Axial Wind Conditions
• Yaw Conditions
• Tower Interaction Effects
Georgia Tech School of Aerospace Engineering
Extraction of Physics
•Examination of flow field, transition lines and blade loads
•Examination of wake state
•Examination and improvement of tip loss models using CFD results as a guide
•Examination of stall delay models using CFD results as a guide
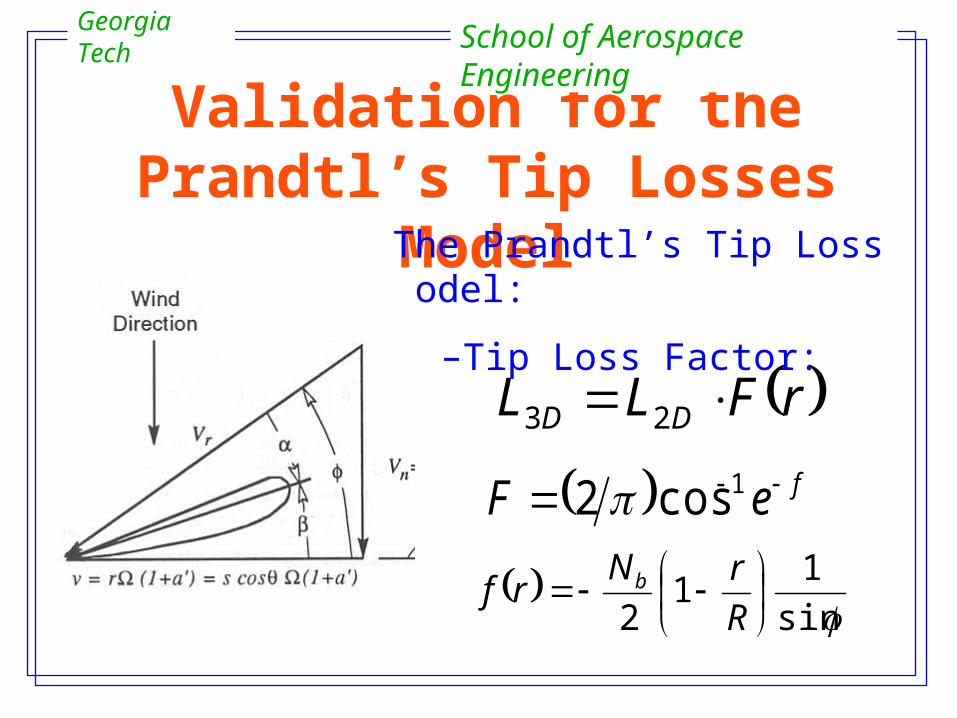
Validation for the Prandtl’s Tip Losses Model
feF 1cos2
The Prandtl’s Tip Loss Model:
–Tip Loss Factor:
sin
11
2
R
rNrf b
rFLL DD 23
Georgia Tech School of Aerospace Engineering
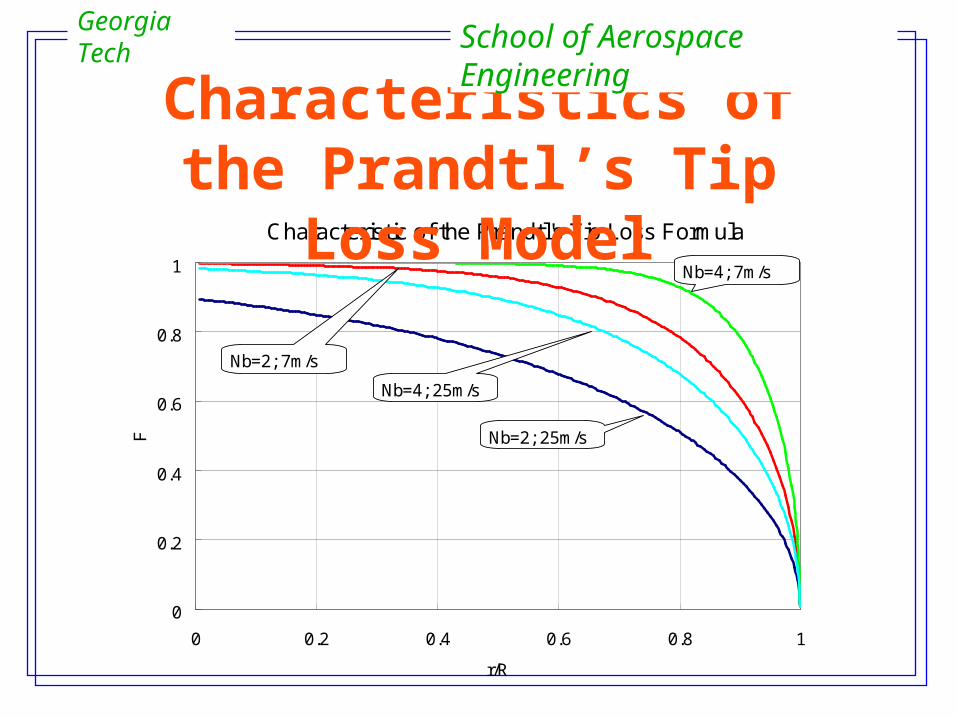
Characteristic of the Prandtl's Tip Loss Formula
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
r/R
F Nb=2; 25m/s
Nb=4; 25m/s
Nb=4; 7m/s
Nb=2; 7m/s
Characteristics of the Prandtl’s Tip Loss Model
Georgia Tech School of Aerospace Engineering
Extraction of the tip loss factor from CFD
•Focuses on tip region only; r/R from 0.8 to 1
•Extract Lift L(r), Local impinging angle (r), and local dynamic pressure Q(r)
rccrQ
rLrF
L )( r = 0.8 ~ 1
• Normalize by F(r)max to eliminate stall delay effects
•Constant Stall delay of 1(Stall delay is explained later)
Georgia Tech School of Aerospace Engineering
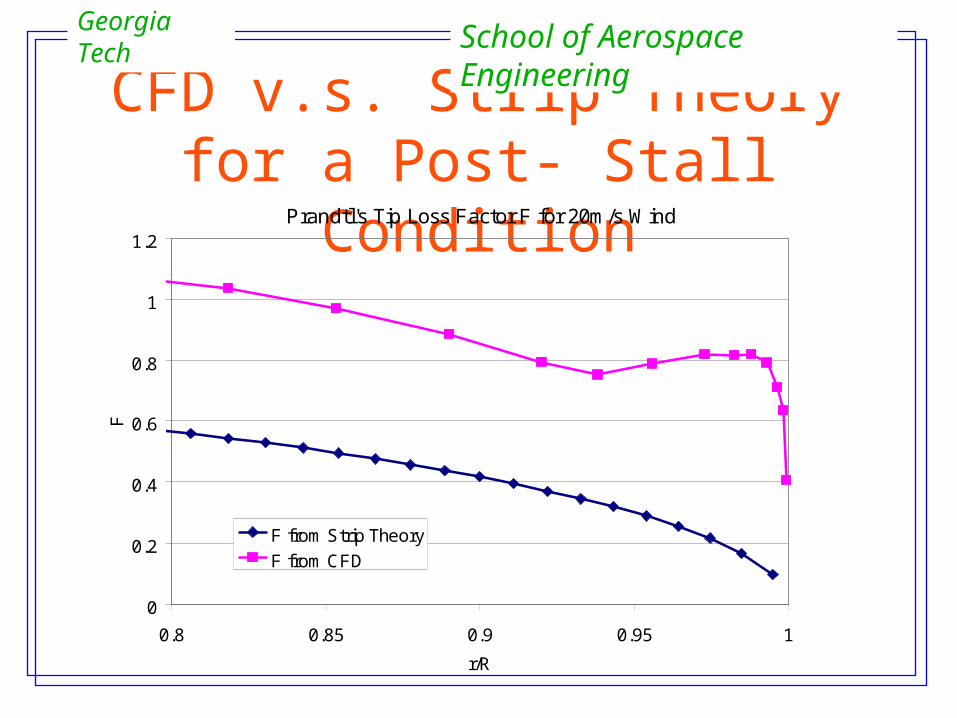
CFD v.s. Strip Theory for a Post- Stall Condition
Prandtl's Tip Loss Factor F for 20m/s Wind
0
0.2
0.4
0.6
0.8
1
1.2
0.8 0.85 0.9 0.95 1
r/R
F
F from Strip Theory
F from CFD
Georgia Tech School of Aerospace Engineering

CFD v.s. Strip Theory for Pre-Stall Condition (I)
Prandtl's Tip Loss Factor F for 7m/s Wind
0
0.2
0.4
0.6
0.8
1
0.8 0.85 0.9 0.95 1
r/R
F
F from CFD
F from Strip Theory
Georgia Tech School of Aerospace Engineering
Reasons for Discrepancies in Prandtl’s Tip Loss Model
•Prandtl’s model is based on rotor in hover, where a closely spaced wake immediately under the disk exists.
•Wind turbines operate in large axial velocity environment, which increases the vortex ring placement.
•A new empirical tip loss model has been developed using Phase VI data, and tested with Phase III data.
Prandtl’s model was tailored for helicopter rotors
Georgia Tech School of Aerospace Engineering
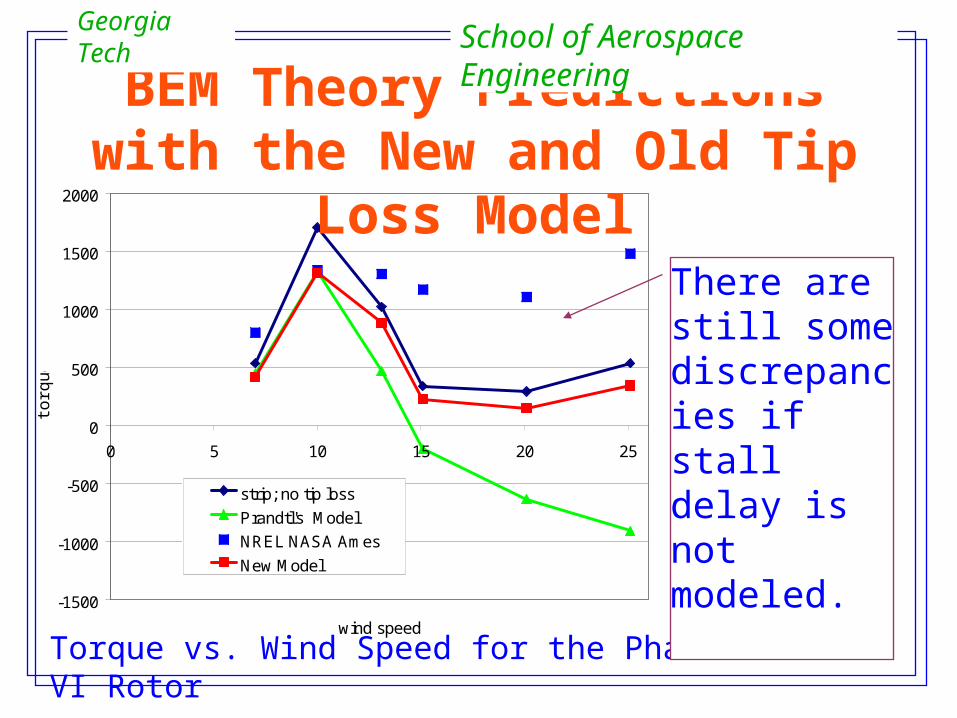
-1500
-1000
-500
0
500
1000
1500
2000
0 5 10 15 20 25
wind speed
torq
ue
strip; no tip loss
Prandtl's Model
NREL NASA Ames
New Model
BEM Theory Predictions with the New and Old Tip Loss Model
Torque vs. Wind Speed for the Phase VI Rotor
There are still some discrepancies if stall delay is not modeled.
Georgia Tech School of Aerospace Engineering
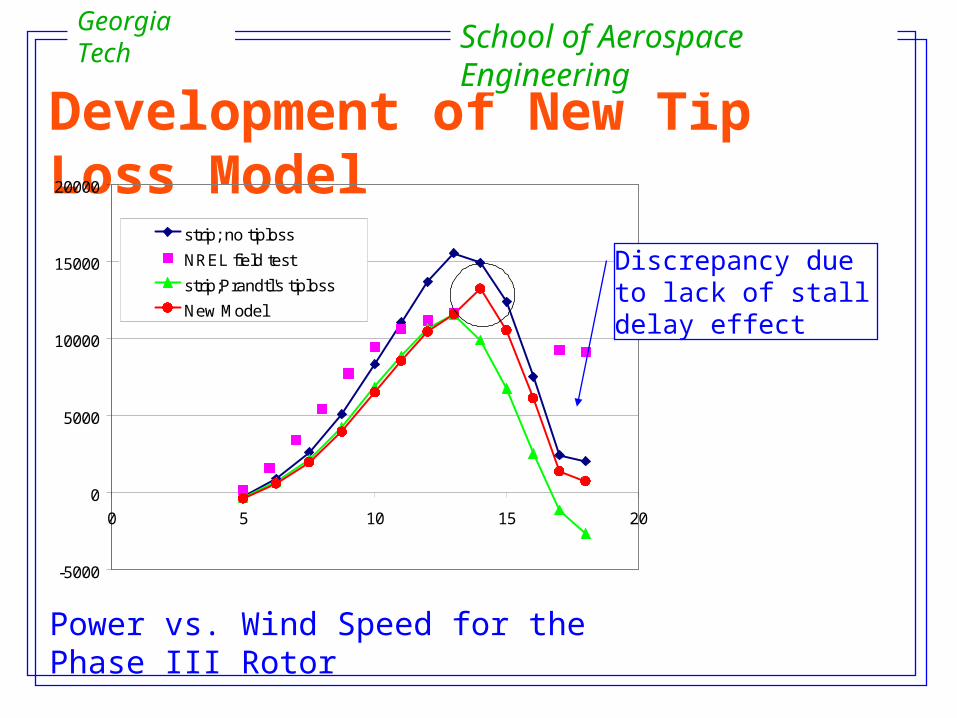
Development of New Tip Loss Model
Power vs. Wind Speed for the Phase III Rotor
-5000
0
5000
10000
15000
20000
0 5 10 15 20
strip; no tiploss
NREL field test
strip;Prandtl's tiploss
New Model
Discrepancy due to lack of stall delay effect
Georgia Tech School of Aerospace Engineering
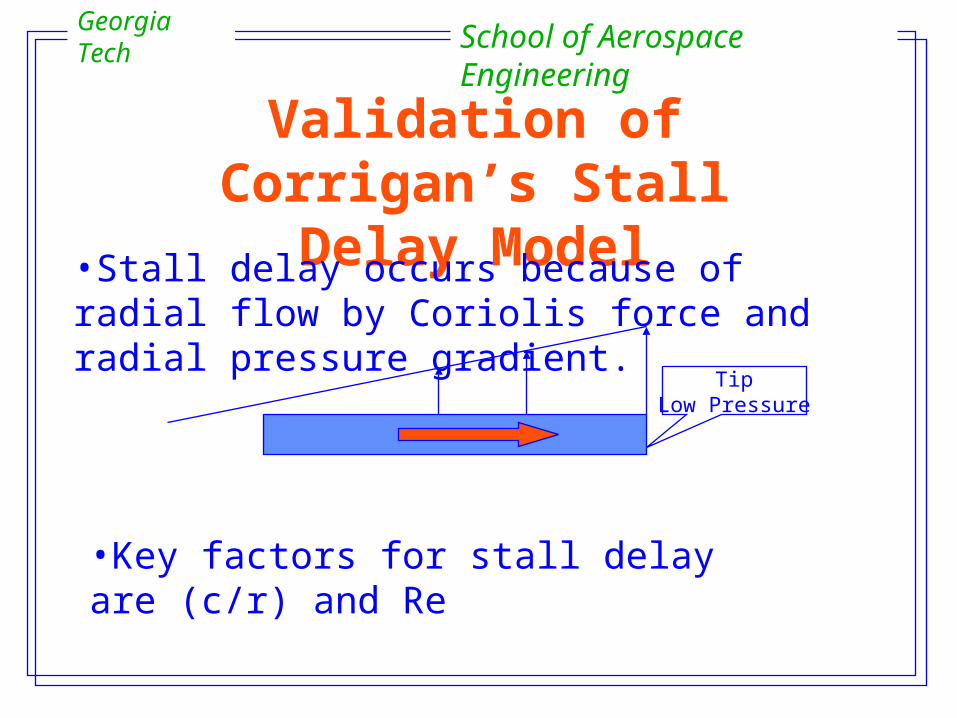
Validation of Corrigan’s Stall Delay Model
•Stall delay occurs because of radial flow by Coriolis force and radial pressure gradient.
TipLow Pressure
•Key factors for stall delay are (c/r) and Re
Georgia Tech School of Aerospace Engineering
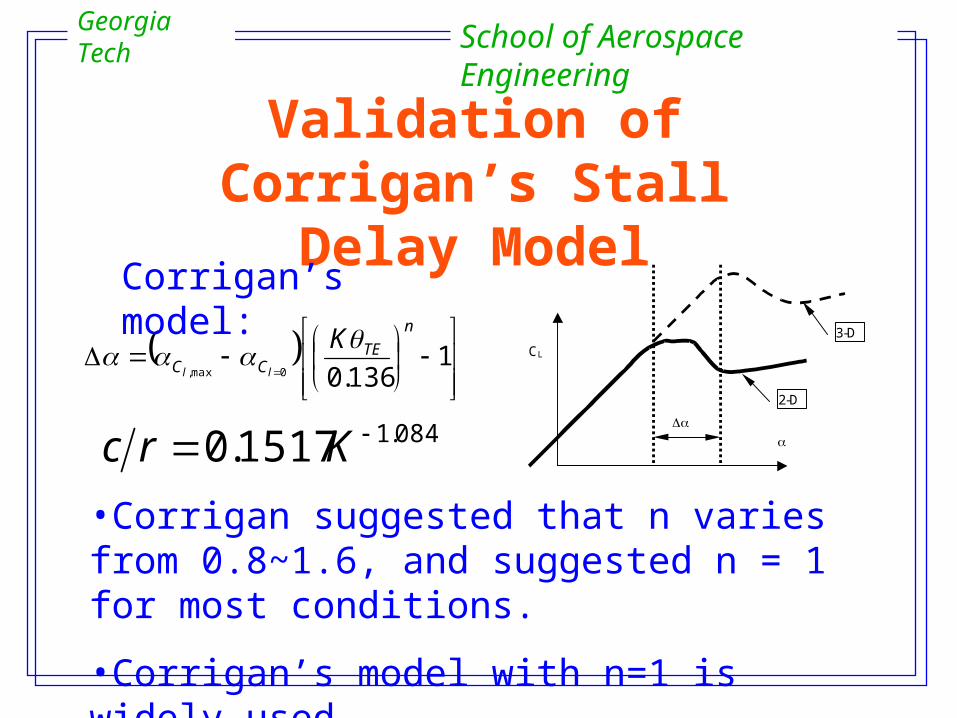
Validation of Corrigan’s Stall Delay Model
2-D
3-DCL
1
136.00max,
n
TECC
Kll
084.11517.0 Krc
Corrigan’s model:
•Corrigan suggested that n varies from 0.8~1.6, and suggested n = 1 for most conditions.
•Corrigan’s model with n=1 is widely used.
Georgia Tech School of Aerospace Engineering
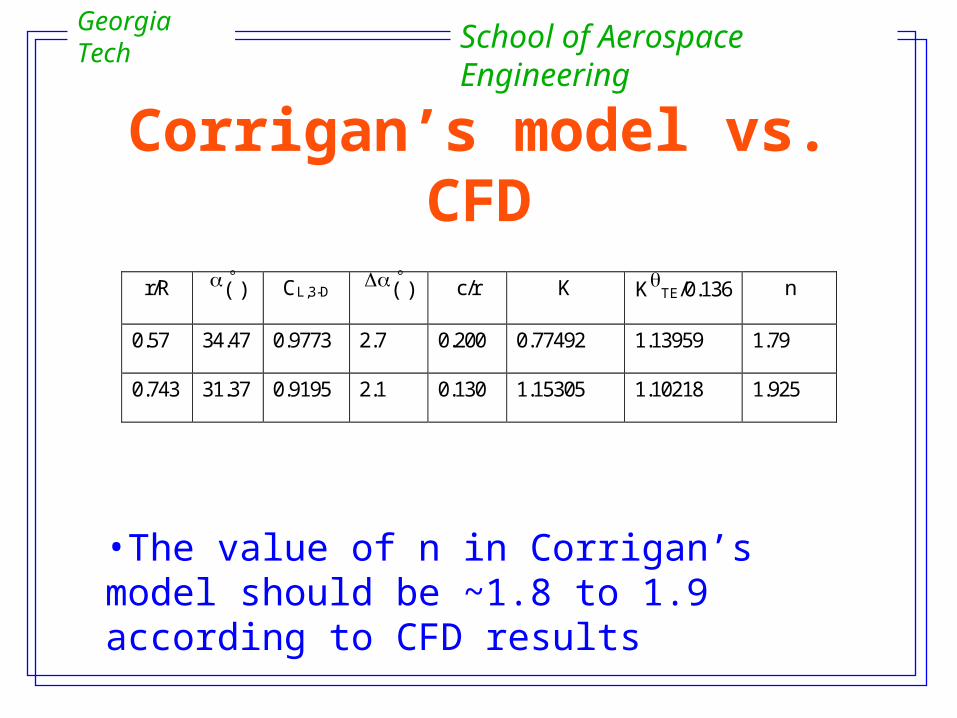
Corrigan’s model vs. CFD
•The value of n in Corrigan’s model should be ~1.8 to 1.9 according to CFD results
r/R ( ) CL,3-D( ) c/r K KTE/0.136 n
0.57 34.47 0.9773 2.7 0.200 0.77492 1.13959 1.79
0.743 31.37 0.9195 2.1 0.130 1.15305 1.10218 1.925
Georgia Tech School of Aerospace Engineering
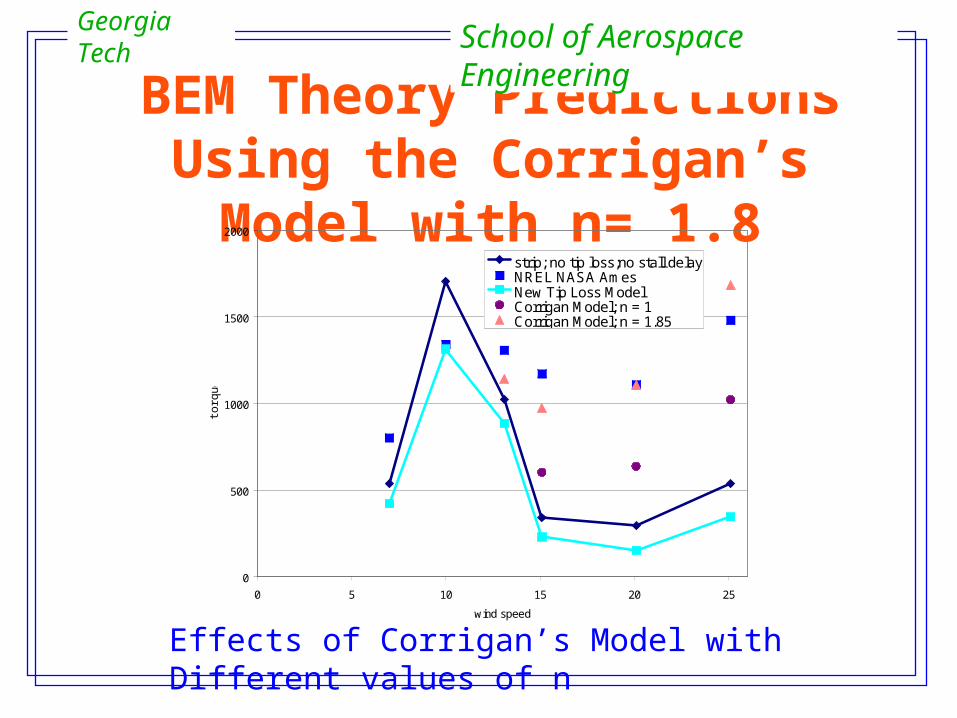
BEM Theory Predictions Using the Corrigan’s Model with n= 1.8
0
500
1000
1500
2000
0 5 10 15 20 25
wind speed
torq
ue
strip; no tip loss;no stall delayNREL NASA AmesNew Tip Loss ModelCorrigan Model; n = 1Corrigan Model; n = 1.85
Effects of Corrigan’s Model with Different values of n
Georgia Tech School of Aerospace Engineering
Conclusions (I)
•The Hybrid methodology is an efficient means of studying
the HAWT flow phenomena for both axial and yaw
conditions.
•The Spalart-Allmaras model, a one-equation turbulence
model, predicts higher turbulence viscosity than the
Baldwin-Lomax turbulence model. As a consequence the
Spalart-Allmaras model predicts slightly lower power
values. Nevertheless, both models yield power predictions
that are well within the uncertainties associated with the
measurements.
Georgia Tech School of Aerospace Engineering
Conclusions(II)•The Eppler’s transition model and the Michel’s transition model in the present methodology both give comparable transition locations. The Eppler’s model assumes that transition will occur if there is a laminar separation bubble at the leading edge. Based on this physical consideration, Eppler’s model is considered to be superior to Michel’s model.
•Wind turbine states profoundly affects the power estimates. Proper transition of the wake geometry from one state to the next, as the wind speed increases, is found to be essential to accurately predicting the generated power.
Georgia Tech School of Aerospace Engineering
Conclusions(III)•The present simulations for rotors operating in yaw conditions reveal that presence of Nb-per revolution, 2Nb-per-rev, and higher harmonic fluctuations in the loads, where Nb is the number of blades. Accurate prediction of these higher harmonics is important for fatigue life estimates.
•The present simulations suggest a very small reduction in power due to tower shadow effects. If one is interested in power estimates, it is not necessary to include tower effects. However, the tower wake can trigger dynamic stall, which will persist over a larger potion of the rotor disk. Tower effects must be studied if these factors, which contribute to fatigue, are important.
Georgia Tech School of Aerospace Engineering
Recommendation(I)
•The present method is quite efficient ( ~ 4 hours on a Linux
system). Further efficiency gains are possible using multigrid,
local time stepping, parallel/distributed computing, etc. These
options must be explored.
•Further validation of the present method using the high quality
Phase VI Rotor data is recommended.
•The proposed wake state models can and should be
implemented in industry methods such as YawDyn, to correctly
model the breaks in the Power vs. Wind Speed Curve.
Georgia Tech School of Aerospace Engineering
Recommendation(II)
•The proposed tip loss model (based on curve-fit of Phase III
rotor results), and the stall delay model (n = 1.8) should be
further tested, using Phase VI and other wind tunnel data.
•The present study relied on power measurement, a global
quantity. Flow details such as velocity, vorticity, turbulence
load etc, must be studied and improving using Phase VI data.
Georgia Tech School of Aerospace Engineering