Embed Size (px)
Citation preview

Low Latency, High Bisection-Bandwidth Networksfor Exascale Memory Systems
Shang Li, Po-Chun Huang, David Banks, Max DePalma, Ahmed Elshaarany,Scott Hemmert*, Arun Rodrigues*, Emily Ruppel, Yitian Wang,
Jim Ang*, and Bruce Jacob
Electrical & Computer Engineering * Scalable Computer ArchitecturesUniversity of Maryland Sandia National Laboratories
College Park, Maryland, USA Albuquerque, New Mexico, USA{shangli,hpcalex,blj}@umd.edu {kshemme,afrodri,jaang}@sandia.gov
ABSTRACTData movement is the limiting factor in modern supercom-puting systems, as system performance drops by several or-ders of magnitude whenever applications need to move data.Therefore, focusing on low latency (e.g., low diameter) net-works that also have high bisection bandwidth is critical. Wepresent a cost/performance analysis of a wide range of high-radix interconnect topologies, in terms of bisection widths,average hop counts, and the port costs required to achievethose metrics. We study variants of traditional topologies aswell as one novel topology. We identify several designs thathave reasonable port costs and can scale to hundreds of thou-sands, perhaps millions, of nodes with maximum latenciesas low as two network hops and high bisection bandwidths.
CCS Concepts•Networks → Network architectures; •Hardware →Buses and high-speed links;
Keywordsnetwork topology; supercomputer design; SST
1. INTRODUCTIONComputational efficiency is the fundamental barrier to ex-
ascale computing, and it is dominated by the cost of movingdata from one point to another, not by the cost of executingfloating-point operations [11, 16]. Data movement has beenthe identified problem for many years (e.g., “the memorywall” is a well-known limiting factor [21]) and still domi-nates the performance of real applications in supercomputerenvironments today [13]. In a recent talk, Jack Dongarrashowed the extent of the problem: his slide, reproduced inFigure 1, shows the vast difference, observed in actual sys-tems (the top 20 of the Top 500 List), between peak FLOPS,
Permission to make digital or hard copies of all or part of this work for personal orclassroom use is granted without fee provided that copies are not made or distributedfor profit or commercial advantage and that copies bear this notice and the full citationon the first page. Copyrights for components of this work owned by others than theauthor(s) must be honored. Abstracting with credit is permitted. To copy otherwise, orrepublish, to post on servers or to redistribute to lists, requires prior specific permissionand/or a fee. Request permissions from [email protected].
MEMSYS ’16, October 03 - 06, 2016, Alexandria, VA, USAc© 2016 Copyright held by the owner/author(s). Publication rights licensed to ACM.
ISBN 978-1-4503-4305-3/16/10. . . $15.00
DOI: http://dx.doi.org/10.1145/2989081.2989130
Abstract — Data movement is the limiting factor in modern su-percomputing systems, as system performance drops by several orders of magnitude whenever applications need to move data. Therefore, focusing on low latency (e.g., low diameter) networks that also have high bisection bandwidth is critical. We present a cost/performance analysis of a wide range of high-radix inter-connect topologies, in terms of bisection widths, average hop counts, and the port costs required to achieve those metrics. We study variants of traditional topologies as well as one novel topol-ogy. We identify several designs that have reasonable port costs and can scale to hundreds of thousands, perhaps millions, of nodes with maximum latencies as low as two network hops and high bisection bandwidths.
I. INTRODUCTION
Computational efficiency is the fundamental barrier to exas-cale computing, and it is dominated by the cost of moving data from one point to another, not by the cost of executing float-ing-point operations [1; 2]. Data movement has been the iden-tified problem for many years (e.g., “the memory wall” is a well-known limiting factor [3]) and still dominates the per-formance of real applications in supercomputer environments today [4]. In a recent talk, Jack Dongarra showed the extent of the problem: his slide, reproduced in Figure 1, shows the vast difference, observed in actual systems (the top 20 of the Top 500 List), between peak FLOPS, the achieved FLOPS on Lin-pack (HPL), and the achieved FLOPS on Conjugate Gradients (HPCG), which has an all-to-all communication pattern within it. While systems routinely achieve 90% of peak performance on Linpack, they rarely achieve more than a few percent of
peak performance on HPCG: as soon as data needs to be moved, system performance suffers by orders of magnitude.
Thus, to ensure efficient system design at exascale-class system sizes, it is critical that the system interconnect provide good all-to-all communication: this means high bisection bandwidth and short inter-node latencies. Exascale-class ma-chines are expected to have on the order of one million nodes, with high degrees of integration including hundreds of cores per chip, tightly coupled GPUs (on-chip or on-package), and integrated networking. Integrating components both increases inter-component bandwidth and reduces power and latency; moreover, integrating the router with the CPU (concentration factor C=1) reduces end-to-end latency by two high-energy chip/package crossings. In addition to considering bisection and latency characteristics, the network design should consid-er costs in terms of router ports, as these have a dollar cost and also dictate power and energy overheads.
We present a cost/performance analysis of several high-radix network topologies, evaluating each in terms of port costs, bisection bandwidths, and average latencies. System sizes presented here range from 100 nodes to one million. We find the following:
• Perhaps not surprisingly, the best topology changes with the system size. Router ports can be spent to increase bi-section bandwidth, reduce latency (network/graph diame-ter), and increase total system size: any two can be im-proved at the expense of the third.
• Flattened Butterfly networks match and exceed the bisec-tion bandwidth curves set by Moore bounds and scale well to large sizes by increasing dimension and thus di-ameter.
• Dragonfly networks in which the number of inter-group links is scaled have extremely high bisection bandwidth and match that of the Moore bound when extrapolated to their diameter-2 limit.
• High-dimensional tori scale to very large system sizes, as their port costs are constant, and their average latencies are reasonably low (5–10 network hops) and scale well.
• Novel topologies based on Fishnet (a method of intercon-necting two-hop subnets) become efficient at very large sizes — hundreds of thousands of nodes and beyond.
Our findings show that highly efficient network topologies exist for tomorrow’s exascale systems. For modest port costs, one can scale to extreme node counts, maintain high bisection bandwidths, and still retain low network diameters.
Low Latency, High Bisection Bandwidth Networks for Exascale Memory Systems
Figure 1. A comparison of max theoretical performance, and real scores on Linpack (HPL) and Conjugate Gradients (HPCG). Source: Jack Dongarra
47
10000#
100000#
1000000#
10000000#
100000000#
1# 2# 3# 4# 5# 6# 7# 8# 9# 10# 11# 12# 13# 14# 15# 16# 17# 18# 19# 20#
Flop
/s'
Rank'
Comparison'HPL'&'HPCG'Peak,'HPL,'HPCG'
Rpeak'
HPL'
HPCG'
Figure 1: A comparison of max theoretical perfor-mance, and real scores on Linpack (HPL) and Con-jugate Gradients (HPCG). Source: Jack Dongarra
the achieved FLOPS on Linpack (HPL), and the achievedFLOPS on Conjugate Gradients (HPCG), which has an all-to-all communication pattern within it. While systems rou-tinely achieve 90% of peak performance on Linpack, theyrarely achieve more than a few percent of peak performanceon HPCG: as soon as data needs to be moved, system per-formance suffers by orders of magnitude.
Thus, to ensure efficient system design at exascale-classsystem sizes, it is critical that the system interconnect pro-vide good all-to-all communication: this means high bisec-tion bandwidth and short inter-node latencies. Exascale-class machines are expected to have on the order of one mil-lion nodes, with high degrees of integration including hun-dreds of cores per chip, tightly coupled GPUs (on-chip oron-package), and integrated networking. Integrating com-ponents both increases inter-component bandwidth and re-duces power and latency; moreover, integrating the routerwith the CPU (concentration factor c = 1) reduces end-to-end latency by two high-energy chip/package crossings. Inaddition to considering bisection and latency characteristics,the network design should consider costs in terms of routerports, as these have a dollar cost and also dictate power and

II. NETWORK TOPOLOGIES CONSIDERED
The following describes the various topologies evaluated in this paper. Due to the desire for good all-to-all communication patterns, we focus on high-radix networks, as opposed to low radix topologies such as fat trees [5].
A. Hypercube, Torus, and Higher-Dimensional Extensions2D and 3D meshes and tori are well known and are relatively common. We scale the dimensionality of the tori from 2D to 10D (see Figure 2) and note that any torus with two nodes per side is a de facto hypercube. Like hypercubes, tori have very good efficiency at the higher dimensions: they have fixed port costs (each router has a fixed number of ports, no matter how large the network), and their average latency values grow more slowly than the pin costs of most high-radix network topologies. In addition, they have simple routing heuristics: a node’s address directly determines which port a router can use, without need for a table lookup.
In general, the graphs have the following characteristics, where D is the dimension, and n is the length of a side (for the sake of simplicity, we assume all sides are of equal length):
• Nodes: nD
• Ports: 2D (except for n=2, which is D)• Bisection Links: 2nD-1 (except for n=2, which is nD-1)• Maximum Latency: ~Dn
The maximum latency depends on actual configuration, such as whether the length of a side n is an even number or odd.
Note that, in the degenerate case of n=2 (a hypercube), a wraparound link is not needed, as there are only two nodes to a given side; for this case, the ports per node and the bisection bandwidth are each reduced by half compared to those for a torus.
B. Flattened Butterfly and Higher-Dimensional ExtensionsThe Flattened Butterfly interconnect shown in Figure 3 pro-vides a regular structure for a two-hop network, which is bene-ficial because it simplifies routing heuristics: like tori, a node’s
address determines which port a router uses, obviating a table lookup. A Flattened Butterfly network is created by combining nodes in both horizontal and vertical dimensions into fully connected graphs. Thus, any node in a Flattened Butterfly topology lies at a maximum distance of 2 from any other node in the network. Noting that this is a 2D structure, it is straight-forward to extend the concept into three dimensions and be-yond. For example, Figure 1 shows both the traditional 2D topology and a 3D Flattened Butterfly structure as well.
In general, the graphs have the following characteristics, where D is the dimension, and n is the length of a side (as with the tori, we assume all sides are of equal length):
• Nodes: nD
• Ports: D(n–1)• Bisection Links: ~ nD-1(n ÷ 2)2
• Maximum Latency: D
The number of bisection links depends on configuration, such as whether the length of a side n is an even number or odd.
Figure 3. Flattened Butterfly (left) and 3D Flattened Butterfly (right): each dimension is characterized by fully connected graphs.
fully connected graphs
Figure 2. 2D, 3D, and 4D meshes/tori. Left: a 3D mesh/torus of side n=3 is simply 3 copies of the 2D mesh/torus tiled into a new dimension. Right: continuing this process produces meshes/tori in 4D, 5D, 6D, and higher dimensions. Note: numerous links not shown, for visibility.
1,1,1 1,1,2 1,1,3
1,2,1 1,2,2 1,2,3
1,3,1 1,3,2 1,3,3
2,1,1 2,1,2 2,1,3
2,2,1 2,2,2 2,2,3
2,3,1 2,3,2 2,3,3
3,1,1 3,1,2 3,1,3
3,2,1 3,2,2 3,2,3
3,3,1 3,3,2 3,3,3
1,1,1,1 1,1,1,2 1,1,1,3
1,1,2,1 1,1,2,2 1,1,2,3
1,1,3,1 1,1,3,2 1,1,3,3
1,2,1,1 1,2,1,2 1,2,1,3
1,2,2,1 1,2,2,2 1,2,2,3
1,2,3,1 1,2,3,2 1,2,3,3
1,3,1,1 1,3,1,2 1,3,1,3
1,3,2,1 1,3,2,2 1,3,2,3
1,3,3,1 1,3,3,2 1,3,3,3
2,1,1,1 2,1,1,2 2,1,1,3
2,1,2,1 2,1,2,2 2,1,2,3
2,1,3,1 2,1,3,2 2,1,3,3
2,2,1,1 2,2,1,2 2,2,1,3
2,2,2,1 2,2,2,2 2,2,2,3
2,2,3,1 2,2,3,2 2,2,3,3
2,3,1,1 2,3,1,2 2,3,1,3
2,3,2,1 3,3,2,2 2,3,2,3
2,3,3,1 2,3,3,2 2,3,3,3
3,1,1,1 3,1,1,2 3,1,1,3
3,1,2,1 3,1,2,2 3,1,2,3
3,1,3,1 3,1,3,2 3,1,3,3
3,2,1,1 3,2,1,2 3,2,1,3
3,2,2,1 3,2,2,2 3,2,2,3
3,2,3,1 3,2,3,2 3,2,3,3
3,3,1,1 3,3,1,2 3,3,1,3
3,3,2,1 3,3,2,2 3,3,2,3
3,3,3,1 3,3,3,2 3,3,3,3
Figure 2: 2D, 3D, and 4D meshes/tori. Left: a 3D mesh/torus of side n=3 is simply 3 copies of the 2Dmesh/torus tiled into a new dimension. Right: continuing this process produces meshes/tori in 4D, 5D, 6D,and higher dimensions. Note: numerous links not shown, for visibility.
energy overheads.We present a cost/performance analysis of several high-
radix network topologies, evaluating each in terms of portcosts, bisection bandwidths, and average latencies. Systemsizes presented here range from 100 nodes to one million.We find the following:
• Perhaps not surprisingly, the best topology changeswith the system size. Router ports can be spent toincrease bisection bandwidth, reduce latency(network/graph diameter), and increase total systemsize: any two can be improved at the expense of thethird.
• Flattened Butterfly networks match and exceed thebisection bandwidth curves set by Moore bounds andscale well to large sizes by increasing dimension andthus diameter.
• Dragonfly networks in which the number ofinter-group links is scaled have extremely highbisection bandwidth and match that of the Moorebound when extrapolated to their diameter-2 limit.
• High-dimensional tori scale to very large system sizes,as their port costs are constant, and their averagelatencies are reasonably low (5 - 10 network hops)and scale well.
• Novel topologies based on Fishnet (a method ofinterconnecting diameter-2 subnets) become efficientat very large sizes - hundreds of thousands of nodesand beyond.
Our findings show that highly efficient network topolo-gies exist for tomorrow’s exascale systems. For modest portcosts, one can scale to extreme node counts, maintain highbisection bandwidths, and still retain low network diame-ters.
1.1 Network Topologies ConsideredThe following describes the various topologies evaluated
in this paper. Due to the desire for good all-to-all communi-cation patterns, we focus on high-radix networks, as opposedto low radix topologies such as fat trees [12].
Hypercube, Torus, and Higher-Dimensional Extensions2D and 3D meshes and tori are well known and are relativelycommon. We scale the dimensionality of the tori from 2D to10D (see Figure 2 ) and note that any torus with two nodesper side is a defacto hypercube. Like hypercubes, tori havevery good efficiency at the higher dimensions: they havefixed port costs (each router has a fixed number of ports,no matter how large the network), and their average la-tency values grow more slowly than the pin costs of mosthigh-radix network topologies. In addition, they have sim-ple routing heuristics: a node’s address directly determineswhich port a router can use, without need for a table lookup.
In general, the graphs have the following characteristics,where D is the dimension, and n is the length of a side(for the sake of simplicity, we assume all sides are of equallength):
• Nodes: nD
• Ports: 2D (except for n = 2, which is D)
• Bisection Links: 2nD−1
(except for n = 2, which is nD−1)
• Maximum Latency: ∼ Dn
The maximum latency depends on actual configuration,such as whether the length of a side n is an even number orodd.
Note that, in the degenerate case of n = 2 (a hypercube), awraparound link is not needed, as there are only two nodesto a given side; for this case, the ports per node and thebisection bandwidth are each reduced by half compared tothose for a torus.
Flattened Butterfly and Higher-Dimensional ExtensionsThe Flattened Butterfly interconnect shown in Figure 3 pro-vides a regular structure for a two-hop network, which isbeneficial because it simplifies routing heuristics: like tori,a node’s address determines which port a router uses, ob-viating a table lookup. A Flattened Butterfly network iscreated by combining nodes in both horizontal and verticaldimensions into fully connected graphs. Thus, any node in

II. NETWORK TOPOLOGIES CONSIDERED
The following describes the various topologies evaluated in this paper. Due to the desire for good all-to-all communication patterns, we focus on high-radix networks, as opposed to low radix topologies such as fat trees [5].
A. Hypercube, Torus, and Higher-Dimensional Extensions2D and 3D meshes and tori are well known and are relatively common. We scale the dimensionality of the tori from 2D to 10D (see Figure 2) and note that any torus with two nodes per side is a de facto hypercube. Like hypercubes, tori have very good efficiency at the higher dimensions: they have fixed port costs (each router has a fixed number of ports, no matter how large the network), and their average latency values grow more slowly than the pin costs of most high-radix network topologies. In addition, they have simple routing heuristics: a node’s address directly determines which port a router can use, without need for a table lookup.
In general, the graphs have the following characteristics, where D is the dimension, and n is the length of a side (for the sake of simplicity, we assume all sides are of equal length):
• Nodes: nD
• Ports: 2D (except for n=2, which is D)• Bisection Links: 2nD-1 (except for n=2, which is nD-1)• Maximum Latency: ~Dn
The maximum latency depends on actual configuration, such as whether the length of a side n is an even number or odd.
Note that, in the degenerate case of n=2 (a hypercube), a wraparound link is not needed, as there are only two nodes to a given side; for this case, the ports per node and the bisection bandwidth are each reduced by half compared to those for a torus.
B. Flattened Butterfly and Higher-Dimensional ExtensionsThe Flattened Butterfly interconnect shown in Figure 3 pro-vides a regular structure for a two-hop network, which is bene-ficial because it simplifies routing heuristics: like tori, a node’s
address determines which port a router uses, obviating a table lookup. A Flattened Butterfly network is created by combining nodes in both horizontal and vertical dimensions into fully connected graphs. Thus, any node in a Flattened Butterfly topology lies at a maximum distance of 2 from any other node in the network. Noting that this is a 2D structure, it is straight-forward to extend the concept into three dimensions and be-yond. For example, Figure 1 shows both the traditional 2D topology and a 3D Flattened Butterfly structure as well.
In general, the graphs have the following characteristics, where D is the dimension, and n is the length of a side (as with the tori, we assume all sides are of equal length):
• Nodes: nD
• Ports: D(n–1)• Bisection Links: ~ nD-1(n ÷ 2)2
• Maximum Latency: D
The number of bisection links depends on configuration, such as whether the length of a side n is an even number or odd.
Figure 3. Flattened Butterfly (left) and 3D Flattened Butterfly (right): each dimension is characterized by fully connected graphs.
fully connected graphs
Figure 2. 2D, 3D, and 4D meshes/tori. Left: a 3D mesh/torus of side n=3 is simply 3 copies of the 2D mesh/torus tiled into a new dimension. Right: continuing this process produces meshes/tori in 4D, 5D, 6D, and higher dimensions. Note: numerous links not shown, for visibility.
1,1,1 1,1,2 1,1,3
1,2,1 1,2,2 1,2,3
1,3,1 1,3,2 1,3,3
2,1,1 2,1,2 2,1,3
2,2,1 2,2,2 2,2,3
2,3,1 2,3,2 2,3,3
3,1,1 3,1,2 3,1,3
3,2,1 3,2,2 3,2,3
3,3,1 3,3,2 3,3,3
1,1,1,1 1,1,1,2 1,1,1,3
1,1,2,1 1,1,2,2 1,1,2,3
1,1,3,1 1,1,3,2 1,1,3,3
1,2,1,1 1,2,1,2 1,2,1,3
1,2,2,1 1,2,2,2 1,2,2,3
1,2,3,1 1,2,3,2 1,2,3,3
1,3,1,1 1,3,1,2 1,3,1,3
1,3,2,1 1,3,2,2 1,3,2,3
1,3,3,1 1,3,3,2 1,3,3,3
2,1,1,1 2,1,1,2 2,1,1,3
2,1,2,1 2,1,2,2 2,1,2,3
2,1,3,1 2,1,3,2 2,1,3,3
2,2,1,1 2,2,1,2 2,2,1,3
2,2,2,1 2,2,2,2 2,2,2,3
2,2,3,1 2,2,3,2 2,2,3,3
2,3,1,1 2,3,1,2 2,3,1,3
2,3,2,1 3,3,2,2 2,3,2,3
2,3,3,1 2,3,3,2 2,3,3,3
3,1,1,1 3,1,1,2 3,1,1,3
3,1,2,1 3,1,2,2 3,1,2,3
3,1,3,1 3,1,3,2 3,1,3,3
3,2,1,1 3,2,1,2 3,2,1,3
3,2,2,1 3,2,2,2 3,2,2,3
3,2,3,1 3,2,3,2 3,2,3,3
3,3,1,1 3,3,1,2 3,3,1,3
3,3,2,1 3,3,2,2 3,3,2,3
3,3,3,1 3,3,3,2 3,3,3,3
Figure 3: Flattened Butterfly (left) and 3D Flat-tened Butterfly (right): each dimension is charac-terized by fully connected graphs.
a Flattened Butterfly topology lies at a maximum distanceof 2 from any other node in the network. Noting that this isa 2D structure, it is straightforward to extend the conceptinto three dimensions and beyond. For example, Figure 3shows both the traditional 2D topology and a 3D FlattenedButterfly structure as well.
In general, the graphs have the following characteristics,where D is the dimension, and n is the length of a side (aswith the tori, we assume all sides are of equal length):
• Nodes: nD
• Ports: D(n1)
• Bisection Links: ∼ nD−1(n/2)2
• Maximum Latency: D
The number of bisection links depends on configuration,such as whether the length of a side n is an even number orodd.
Moore GraphsComputer networks based upon the Moore limit have beenused since the 1960s [7, 3] and have the advantage of max-imizing the number of nodes in the system, given a specificnumber of ports per router and a desired maximum networkhop count (graph diameter). Compared to regular topolo-gies such as meshes/tori and Flattened Butterfly networks,their packet-routing heuristics are more complex and takemore overhead, because a table lookup is required. How-ever, a Moore graph requires fewer ports than a FlattenedButterfly to connect the same number of nodes in the samenumber of hops.
Figure 4 illustrates two extremely well-known instances oftwo-hop (diameter 2) Moore graphs, in which every node liesat a distance of at most two hops from every other node inthe graph. The Petersen graph combines 10 nodes, each ofwhich has 3 ports. The Hoffman-Singleton graph combines50 nodes, each of which has 7 ports, and, as the figure shows,the Hoffman-Singleton graph contains within it five disjointcopies of the Petersen graph. This is important, as it hasmanufacturing implications: only one circuit board designwould be needed for the subnetworks.
Moore graphs were not generally used in network designfor decades, designers preferring hardware routers that usea node’s address to drive routing heuristics rather than atable lookup. However, Moore graphs have seen a recentresurgence in popularity. In 2006, the Petersen graph wasused to construct a high-performance DSP cluster, an im-age processing system for a NASA satellite [17]. In 2013,Bao [2] proposed using 2-hop Moore graphs as interconnectnetworks. In 2014, Besta [4] proposed using 2-hop Mooregraphs as interconnect networks, calling the configuration“Slim Fly.”
The benefit of using a diameter-2 Moore graph is the max-imum system-wide latency of two hops. This comes at aport cost, as to reach higher node counts, the number ofports grows rapidly. For instance, 16 ports per router arerequired for a network of 198 nodes, and 79 ports are neededto build a network of 5600 nodes.
Moreover, the irregular nature of Moore graphs makestheir construction at large sizes non-trivial. The first twoexamples provided in Figure 4 are the best known preciselybecause they are the only two regular variants ever discov-ered: these are the only two graphs known to achieve theMoore limit (the number of nodes reachable given a maxi-mum hop count and number of ports per node). All otherknown graphs fail to reach the Moore limit (indeed, some,like the (3,3) graph in Figure 4, have been proven not toexist) and are thus irregular, which imposes constraints onmanufacturability.
In general, the diameter-2 graphs have the following char-acteristics, where p is the number of ports per node:
• Nodes: p2 + 1
• Ports: p
• Bisection Links: ∼ (p− 2)(Nodes/4)
• Maximum Latency: 2
Note that the number of nodes is an upper bound, andonly three graphs have been discovered that actually reachthis upper bound: the pentagon (effectively the degeneratecase), the 10-node Petersen graph, and the 50-node Hoffman-Singleton graph. As one chooses Moore graphs of increas-ing diameter, the network size achievable with a relativelysmall number of ports grows rapidly. For instance, on theright of 4 is shown a diameter-3 graph with 22 nodes; adiameter-4 graph has an upper bound of 46. In actuality,the largest known diameter-3 graph has 20 nodes, and thelargest known diameter-4 graph has 38. The table belowshows the difference between the various bounds (labeled“Max”) and the known graph sizes that have been discov-ered (labeled “Real”): the difference factor grows with bothdiameter and number of ports [20].
Dragonfly and High-Bisection ExtensionsThe Dragonfly interconnect [10] is an internet structure, anetwork of subnetworks. Perhaps the most common form ofDragonfly, which is the form we analyze here, is a fully con-nected graph of fully connected graphs, which gives it a di-ameter 3 across the whole network. This is illustrated in Fig-ure 5. Dragonfly networks can use any number of ports forinter-subnet connections, and any number for intra-subnetconnections. We vary the number of inter-subnet links, char-acterizing 1, 2, 4, etc. links connecting each subnet, noting

C. Moore GraphsComputer networks based upon the Moore limit have been used since the 1960s [6; 7] and have the advantage of maxi-mizing the number of nodes in the system, given a specific number of ports per router and a desired maximum network hop count (graph diameter). Compared to regular topologies such as meshes/tori and Flattened Butterfly networks, their packet-routing heuristics are more complex and take more overhead, because a table lookup is required. However, a Moore graph requires fewer ports than a Flattened Butterfly to connect the same number of nodes in the same number of hops.
Figure 4 illustrates two extremely well-known instances of two-hop (diameter 2) Moore graphs, in which every node lies at a distance of at most two hops from every other node in the graph. The Petersen graph combines 10 nodes, each of which has 3 ports. The Hoffman-Singleton graph combines 50 nodes, each of which has 7 ports, and, as the figure shows, the Hoffman-Singleton graph contains within it five disjoint copies of the Petersen graph. This is important, as it has manu-
facturing implications: only one circuit board design would be needed for the subnetworks.
Moore graphs were not generally used in network design for decades, designers preferring hardware routers that use a node’s address to drive routing heuristics rather than a table lookup. However, Moore graphs have seen a recent resurgence in popularity. In 2006, the Petersen graph was used to con-struct a high-performance DSP cluster, an image processing system for a NASA satellite [8]. In 2013, Bao [9] proposed using 2-hop Moore graphs as interconnect networks. In 2014, Besta [3] proposed using 2-hop Moore graphs as interconnect networks, calling the configuration “Slim Fly.”
The benefit of using a diameter-2 Moore graph is the maximum system-wide latency of two hops. This comes at a port cost, as to reach higher node counts, the number of ports grows rapidly. For instance, 16 ports per router are required for a network of 198 nodes, and 79 ports are needed to build a network of 5600 nodes.
Moreover, the irregular nature of Moore graphs makes their construction at large sizes non-trivial. The first two ex-amples provided in Figure 4 are the best known precisely be-cause they are the only two regular variants ever discovered: these are the only two graphs known to achieve the Moore limit (the number of nodes reachable given a maximum hop count and number of ports per node). All other known graphs fail to reach the Moore limit (indeed, some, like the (3,3) graph in Figure 3, have been proven not to exist) and are thus irregular, which imposes constraints on manufacturability.
In general, the diameter-2 graphs have the following characteristics, where p is the number of ports per node:
• Nodes: p2 + 1• Ports: p• Bisection Links: ~ (p–2)(Nodes ÷ 4)• Maximum Latency: 2
Note that the number of nodes is an upper bound, and only three graphs have been discovered that actually reach this up-per bound: the pentagon (effectively the degenerate case), the 10-node Petersen graph, and the 50-node Hoffman-Singleton graph. As one chooses Moore graphs of increasing diameter,
Moore Graphs: Bounds vs. Largest Known
Diameter 2 Diameter 3 Diameter 4Ports Max Real Diff Max Real Diff Max Real Diff
3 10 10 = 22 20 1.1 46 38 1.2
4 17 15 1.1 53 41 1.3 161 96 1.7
5 26 24 1.1 106 72 1.5 426 210 2.0
6 37 32 1.2 187 110 1.7 937 390 2.4
7 50 50 = 302 168 1.8 1814 672 2.7
8 65 57 1.1 457 253 1.8 3201 1100 2.9
9 82 74 1.1 658 585 1.1 5266 1550 3.4
10 101 91 1.1 911 650 1.4 8201 2286 3.6
11 122 104 1.2 1222 715 1.7 12222 3200 3.8
12 145 133 1.1 1597 786 2.0 17569 4680 3.8
13 170 162 1.0 2042 851 2.4 24506 6560 3.7
14 197 183 1.1 2563 916 2.8 33321 8200 4.1
15 226 186 1.2 3166 1215 2.6 44326 11712 3.8
16 257 198 1.3 3857 1600 2.4 57857 14640 4.0
Figure 4. Two well-known 2-hop Moore graphs: the 10-node Petersen graph (left) and the 50-node Hoffman-Singleton graph (middle); the Moore limit is shown for a 3-hop graph with 3 ports per node (right), without final connecting edges, as the (3,3) limit is unachievable.
C
A1 A2
B1C2
C1 B2
B
A
0
3
4
5
6
2
1
12
11
8 7910
Figure 4: Two well-known 2-hop Moore graphs: the 10-node Petersen graph (left) and the 50-node Hoffman-Singleton graph (middle); the Moore limit is shown for a 3-hop graph with 3 ports per node (right), withoutfinal connecting edges, as the (3,3) limit is unachievable.
Table 1: Moore Graphs: Bounds vs. Largest KnownDiameter 2 Diameter 3 Diameter 4
Ports Max Real Diff Max Real Diff Max Real Diff3 10 10 = 22 20 1.1 46 38 1.24 17 15 1.1 53 41 1.3 161 96 1.75 26 24 1.1 106 72 1.5 426 210 2.06 37 32 1.2 187 110 1.7 937 390 2.47 50 50 = 302 168 1.8 1814 672 2.78 65 57 1.1 457 253 1.8 3201 1100 2.99 82 74 1.1 658 585 1.1 5266 1550 3.410 101 91 1.1 911 650 1.4 8201 2286 3.611 122 104 1.2 1222 715 1.7 12222 3200 3.812 145 133 1.1 1597 786 2.0 17569 4680 3.813 170 162 1.0 2042 851 2.4 24506 6560 3.714 197 183 1.1 2563 916 2.8 33321 8200 4.115 226 186 1.2 3166 1215 2.6 4432 11712 3.816 257 198 1.3 3857 1600 2.4 57857 14640 4.0
the network size achievable with a relatively small number of ports grows rapidly. For instance, on the right of Figure 3 is shown a diameter-3 graph with 22 nodes; a diameter-4 graph has an upper bound of 46. In actuality, the largest known di-ameter-3 graph has 20 nodes, and the largest known diameter-4 graph has 38. The table below shows the difference between the various bounds (labeled “Max”) and the known graph sizes that have been discovered (labeled “Real”): the difference fac-tor grows with both diameter and number of ports [10].
D. Dragonfly and High-Bisection ExtensionsThe Dragonfly interconnect [11] is an internet structure, a network of subnetworks. Perhaps the most common form of Dragonfly, which is the form we analyze here, is a fully con-nected graph of fully connected graphs, which gives it a diam-eter 3 across the whole network. This is illustrated in Figure 5. Dragonfly networks can use any number of ports for inter-subnet connections, and any number for intra-subnet connec-tions. We vary the number of inter-subnet links, characterizing 1, 2, 4, etc. links connecting each subnet, noting that, when the number of inter-subnet links is equal to one more than the in-tra-subnet links, the entire network has a diameter of 2, not 3 (if every node has a connection to each of its local nodes as well as a connection to each one of the remote subnets, then it is by definition a two-hop network), which in our graphs later we will label as the “Dragonfly Limit.”
In general, Dragonfly networks of this form have the fol-lowing characteristics, where p is the number of ports for in-tra-subnet connections, and s is the number of ports connected to remote subnets:
• Nodes: (p + 1)(p + 2)• Ports: p + s• Bisection Links: ~ s((p+2)2 ÷ 4)• Maximum Latency: 3
The bisection depends on actual configuration, such as whether the number of subnets (p+1) is even or odd.
E. Fishnet: Angelfish and Flying FishThe Fishnet interconnection methodology is a novel means to connect multiple copies of a given subnetwork [12], for in-stance a 2-hop Moore graph or 2-hop Flattened Butterfly net-work. Each subnet is connected by multiple links, the originat-ing nodes in each subnet chosen so as to lie at a maximum distance of 1 from all other nodes in the subnet. For instance, in a Moore graph, each node defines such a subset: its nearest
neighbors by definition lie at a distance of 1 from all other nodes in the graph, and they lie at a distance of 2 from each other. Figure 6 illustrates.
Using nearest-neighbor subsets to connect the members of different subnetworks to each other produces a system-wide diameter of 4, given diameter-2 subnets: to reach remote sub-network i, one must first reach one of the nearest neighbors of node i within the local subnetwork. By definition, this takes at most one hop. Another hop reaches the remote network, where it is at most two hops to reach the desired node. The “Fishnet Lite” variant uses a single link to connect each subnet, as in a typical Dragonfly, and has maximum five hops between any two nodes, as opposed to four.
An example topology using the Petersen graph is illus-trated in Figure 7: given a 2-hop subnet of n nodes, each node having p ports (in this case each subnet has 10 nodes, and each node has 3 ports), one can construct a system of n+1 subnets, in two ways: the first uses p+1 ports per node and has a maxi-mum latency of five hops within the system; the second uses 2p ports per node and has a maximum latency of four hops.
The nodes of subnet 0 are labeled 1..n; the nodes of sub-net 1 are labeled 1,2..n; the nodes of subnet 2 are labeled 0,1,3..n; the nodes of subnet 3 are labeled 0..2,4..n; etc. In the top illustration, node i in subnet j connects directly to node j in subnet i. In the bottom illustration, the immediate neighbors of node i in subnet j connect to the immediate neighbors of node j in subnet i.
Using the Fishnet interconnection methodology to com-bine Moore networks produces an Angelfish network, illustrat-ed in Figure 7. Using Fishnet on a Flattened Butterfly network produces a Flying Fish network, illustrated in Figures 8 and 9. Figure 8 illustrates a Flying Fish Lite network based on 7x7 49-node Flattened Butterfly subnets. The same numbering scheme is used as in the Angelfish example: for all subnets X from 0 to 49 there is a connection between subnet X, node Y
Figure 6. Each node, via its set of nearest neighbors, defines a unique subset of nodes that lies at a maximum of 1 hop from all other nodes in the graph. In other words, it only takes 1 hop from anywhere in the graph to reach one of the nodes in the subset. Nearest-neighbor subsets are shown in a Petersen graph for six of the graph’s nodes.
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
Figure 5. Dragonfly interconnect: a fully connected graph of fully connected graphs.
127
4
3
5
6
127
4
3
5
6
127
4
3
5
6
127
4
3
5
6
127
4
3
5
6…
Figure 5: Dragonfly interconnect: a fully connectedgraph of fully connected graphs.
that, when the number of inter-subnet links is equal to onemore than the intra-subnet links, the entire network has adiameter of 2, not 3 (if every node has a connection to eachof its local nodes as well as a connection to each one of theremote subnets, then it is by definition a two-hop network),which in our graphs later we will label as the “DragonflyLimit.”
In general, Dragonfly networks of this form have the fol-lowing characteristics, where p is the number of ports forintra-subnet connections, and s is the number of ports con-nected to remote subnets:
• Nodes: (p + 1)(p + 2)
• Ports: p + s
• Bisection Links: ∼ s((p + 2)2/4)
• Maximum Latency: 3
The bisection bandwidth depends on actual configuration,such as whether the number of subnets (p+1) is even or odd.
Fishnet: Angelfish and Flying FishThe Fishnet interconnection methodology is a novel meansto connect multiple copies of a given subnetwork [8], forinstance a 2-hop Moore graph or 2-hop Flattened Butterflynetwork. Each subnet is connected by multiple links, theoriginating nodes in each subnet chosen so as to lie at amaximum distance of 1 from all other nodes in the subnet.For instance, in a Moore graph, each node defines such asubset: its nearest neighbors by definition lie at a distanceof 1 from all other nodes in the graph, and they lie at adistance of 2 from each other. Figure 6 illustrates.
Using nearest-neighbor subsets to connect the members ofdifferent subnetworks to each other produces a system-widediameter of 4, given diameter-2 subnets: to reach remotesubnetwork i, one must first reach one of the nearest neigh-bors of node i within the local subnetwork. By definition,

the network size achievable with a relatively small number of ports grows rapidly. For instance, on the right of Figure 3 is shown a diameter-3 graph with 22 nodes; a diameter-4 graph has an upper bound of 46. In actuality, the largest known di-ameter-3 graph has 20 nodes, and the largest known diameter-4 graph has 38. The table below shows the difference between the various bounds (labeled “Max”) and the known graph sizes that have been discovered (labeled “Real”): the difference fac-tor grows with both diameter and number of ports [10].
D. Dragonfly and High-Bisection ExtensionsThe Dragonfly interconnect [11] is an internet structure, a network of subnetworks. Perhaps the most common form of Dragonfly, which is the form we analyze here, is a fully con-nected graph of fully connected graphs, which gives it a diam-eter 3 across the whole network. This is illustrated in Figure 5. Dragonfly networks can use any number of ports for inter-subnet connections, and any number for intra-subnet connec-tions. We vary the number of inter-subnet links, characterizing 1, 2, 4, etc. links connecting each subnet, noting that, when the number of inter-subnet links is equal to one more than the in-tra-subnet links, the entire network has a diameter of 2, not 3 (if every node has a connection to each of its local nodes as well as a connection to each one of the remote subnets, then it is by definition a two-hop network), which in our graphs later we will label as the “Dragonfly Limit.”
In general, Dragonfly networks of this form have the fol-lowing characteristics, where p is the number of ports for in-tra-subnet connections, and s is the number of ports connected to remote subnets:
• Nodes: (p + 1)(p + 2)• Ports: p + s• Bisection Links: ~ s((p+2)2 ÷ 4)• Maximum Latency: 3
The bisection depends on actual configuration, such as whether the number of subnets (p+1) is even or odd.
E. Fishnet: Angelfish and Flying FishThe Fishnet interconnection methodology is a novel means to connect multiple copies of a given subnetwork [12], for in-stance a 2-hop Moore graph or 2-hop Flattened Butterfly net-work. Each subnet is connected by multiple links, the originat-ing nodes in each subnet chosen so as to lie at a maximum distance of 1 from all other nodes in the subnet. For instance, in a Moore graph, each node defines such a subset: its nearest
neighbors by definition lie at a distance of 1 from all other nodes in the graph, and they lie at a distance of 2 from each other. Figure 6 illustrates.
Using nearest-neighbor subsets to connect the members of different subnetworks to each other produces a system-wide diameter of 4, given diameter-2 subnets: to reach remote sub-network i, one must first reach one of the nearest neighbors of node i within the local subnetwork. By definition, this takes at most one hop. Another hop reaches the remote network, where it is at most two hops to reach the desired node. The “Fishnet Lite” variant uses a single link to connect each subnet, as in a typical Dragonfly, and has maximum five hops between any two nodes, as opposed to four.
An example topology using the Petersen graph is illus-trated in Figure 7: given a 2-hop subnet of n nodes, each node having p ports (in this case each subnet has 10 nodes, and each node has 3 ports), one can construct a system of n+1 subnets, in two ways: the first uses p+1 ports per node and has a maxi-mum latency of five hops within the system; the second uses 2p ports per node and has a maximum latency of four hops.
The nodes of subnet 0 are labeled 1..n; the nodes of sub-net 1 are labeled 1,2..n; the nodes of subnet 2 are labeled 0,1,3..n; the nodes of subnet 3 are labeled 0..2,4..n; etc. In the top illustration, node i in subnet j connects directly to node j in subnet i. In the bottom illustration, the immediate neighbors of node i in subnet j connect to the immediate neighbors of node j in subnet i.
Using the Fishnet interconnection methodology to com-bine Moore networks produces an Angelfish network, illustrat-ed in Figure 7. Using Fishnet on a Flattened Butterfly network produces a Flying Fish network, illustrated in Figures 8 and 9. Figure 8 illustrates a Flying Fish Lite network based on 7x7 49-node Flattened Butterfly subnets. The same numbering scheme is used as in the Angelfish example: for all subnets X from 0 to 49 there is a connection between subnet X, node Y
Figure 6. Each node, via its set of nearest neighbors, defines a unique subset of nodes that lies at a maximum of 1 hop from all other nodes in the graph. In other words, it only takes 1 hop from anywhere in the graph to reach one of the nodes in the subset. Nearest-neighbor subsets are shown in a Petersen graph for six of the graph’s nodes.
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
0
8
5
9
3
7
1
4
6
2
Figure 5. Dragonfly interconnect: a fully connected graph of fully connected graphs.
127
4
3
5
6
127
4
3
5
6
127
4
3
5
6
127
4
3
5
6
127
4
3
5
6…
Figure 6: Each node, via its set of nearest neighbors,defines a unique subset of nodes that lies at a maxi-mum of 1 hop from all other nodes in the graph. Inother words, it only takes 1 hop from anywhere inthe graph to reach one of the nodes in the subset.Nearest-neighbor subsets are shown in a Petersengraph for six of the graph’s nodes.
this takes at most one hop. Another hop reaches the re-mote network, where it is at most two hops to reach thedesired node. The “Fishnet Lite” variant uses a single linkto connect each subnet, as in a typical Dragonfly, and hasmaximum five hops between any two nodes, as opposed tofour.
An example topology using the Petersen graph is illus-trated in Figure 7: given a 2-hop subnet of n nodes, eachnode having p ports (in this case each subnet has 10 nodes,and each node has 3 ports), one can construct a system ofn + 1 subnets, in two ways: the first uses p + 1 ports pernode and has a maximum latency of five hops within the sys-tem; the second uses 2p ports per node and has a maximumlatency of four hops.
The nodes of subnet 0 are labeled 1..n; the nodes of sub-net 1 are labeled 1, 2..n; the nodes of subnet 2 are labeled0, 1, 3..n; the nodes of subnet 3 are labeled 0..2, 4..n; etc. Inthe top illustration, node i in subnet j connects directly tonode j in subnet i. In the bottom illustration, the immedi-ate neighbors of node i in subnet j connect to the immediateneighbors of node j in subnet i.
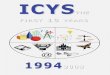
Using the Fishnet interconnection methodology to com-bine Moore networks produces an Angelfish network, illus-trated in Figure 7. Using Fishnet on a Flattened Butterflynetwork produces a Flying Fish network, illustrated in Fig-ures 8 and 9. Figure 8 illustrates a Flying Fish Lite networkbased on 7×7 = 49 -node Flattened Butterfly subnets. Thesame numbering scheme is used as in the Angelfish example:for all subnets X from 0 to 49 there is a connection betweensubnet X, node Y and subnet Y , node X. The result is a2450-node network with a maximum 5-hop latency and 13ports per node. Note that this is similar to the Cray Cas-cade [6], in that it is a complete graph of Flattened Butterflysubnets, with a single link connecting each subnet.
Figure 9 gives an example of connecting subnets in a“full” configuration. Fishnet interconnects identify subsetsof nodes within each subnetwork that are reachable within a
single hop from all other nodes: Flattened Butterflies havenumerous such subsets, including horizontal groups, verti-cal groups, diagonal groups, etc. The example in Figure 9uses horizontal and vertical groups: 98 subnets, numbered1H..49H and 1V..49V. When contacting an “H” subnet, oneuses any node in the horizontal row containing that num-bered node. For example, to communicate from subnet 1Hto subnet 16H, one connects to any node in the horizon-tal row containing node 16. To communicate from subnet1H to subnet 42V, one connects to any node in the verticalcolumn containing node 42. Given that Flattened Butter-fly networks are constructed out of fully connected graphsin both horizontal and vertical dimensions, this means thatone can reach a remote subnet in at most two hops. Fromthere, it is a maximum of two hops within the remote subnetto reach the desired target node. For a Flattened Butterflysubnet of N × N nodes, one can build a system of 2 × N4
nodes with 4×N−2 ports per node and a maximum latencyof 4 hops. This can be extended even further by allowingdiagonal sets as well.
In general, the Angelfish graphs have the following charac-teristics, where p is the number of ports that are used to con-struct the fundamental Moore graph, from which the rest ofthe network is constructed. As mentioned above with Mooregraphs, the number of nodes is an upper bound, unless spe-cific implementations are described, where the numbers areactual.
Angelfish• Nodes: (p2 + 1)(p2 + 2)
• Ports: 2p
• Bisection Links: ∼ p((p2 + 1)2 ÷ 4)
• Maximum Latency: 4
Angelfish Lite• Nodes: (p2 + 1)(p2 + 2)
• Ports: p + 1
• Bisection Links: ∼ (p2 + 1)2 ÷ 4
• Maximum Latency: 5
In general, the Flying Fish graphs have the following char-acteristics, where n is the length of a side:
Flying Fish• Nodes: 2n4
• Ports: 4n2
• Bisection Links: ∼ n(n4) = n5
• Maximum Latency: 4
Flying Fish Lite• Nodes: n2(n2 + 1)
• Ports: 2n1
• Bisection Links: ∼ (n2 + 1)2 ÷ 4
• Maximum Latency: 5

and subnet Y, node X. The result is a 2450-node network with a maximum 5-hop latency and 13 ports per node. Note that this is similar to the Cray Cascade [13], in that it is a complete graph of Flattened Butterfly subnets, with a single link con-necting each subnet.
Figure 9 gives an example of connecting subnets in a “full” configuration. Fishnet interconnects identify subsets of nodes within each subnetwork that are reachable within a sin-gle hop from all other nodes: Flattened Butterflies have nu-merous such subsets, including horizontal groups, vertical groups, diagonal groups, etc. The example in Figure 9 uses horizontal and vertical groups: 98 subnets, numbered 1H..49H and 1V..49V. When contacting an “H” subnet, one uses any node in the horizontal row containing that numbered node. For example, to communicate from subnet 1H to subnet 16H, one connects to any node in the horizontal row containing node 16. To communicate from subnet 1H to subnet 42V, one con-nects to any node in the vertical column containing node 42. Given that Flattened Butterfly networks are constructed out of fully connected graphs in both horizontal and vertical dimen-sions, this means that one can reach a remote subnet in at most two hops. From there, it is a maximum of two hops within the remote subnet to reach the desired target node. For a Flattened Butterfly subnet of NxN nodes, one can build a system of 2N4 nodes with 4N–2 ports per node and a maximum latency of 4
hops. This can be extended even further by allowing diagonal sets as well.
In general, the Angelfish graphs have the following char-acteristics, where p is the number of ports that are used to con-struct the fundamental Moore graph, from which the rest of the network is constructed. As mentioned above with Moore graphs, the number of nodes is an upper bound, unless specific implementations are described, where the numbers are actual.
Angelfish
• Nodes: (p2 + 1)(p2 + 2)• Ports: 2p• Bisection Links: ~ p((p2 + 1) 2 ÷ 4)• Maximum Latency: 4
Angelfish Lite
• Nodes: (p2 + 1)(p2 + 2)• Ports: p+1• Bisection Links: ~ (p2 + 1) 2 ÷ 4• Maximum Latency: 5
In general, the Flying Fish graphs have the following charac-teristics, where n is the length of a side:
Figure 8. Flying Fish Lite network based on a 7x7 Flattened Butterfly subnet — 50 subnets of 49 nodes (2450 nodes, 13 ports each, 5-hop latency). Note that this is the same type of arrangement as the Cray Cascade network.
87 9 10 11 12 13
1514 17 18 19 20 21
10 2 3 4 5 6
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
8 9 10 11 12 137
15 16 17 18 19 2014
22 23 24 25 26 2721
29 30 31 32 33 3428
36 37 38 39 40 4135
1 2 3 4 5 60
44 45 46 47 48 4943
1 2 3 4 5 6 7
8 9 10 11 12 13 14
15 16 17 18 19 20 21
22 23 24 25 26 27 28
29 30 31 32 33 34 35
36 37 38 39 40 41 42
43 44 45 46 47 48 49
subnet 0 subnet 16 subnet 42
… …
Figure 7. Angelfish (bottom) and Angelfish Lite (top) networks based on a Petersen graph.
8
10 3
49
7 6
5
2
1
8
10 3
49
7 6
5
2
0
8
10 3
49
7 6
5
1
0
7
9 2
38
6 5
4
1
0
subnet 0 subnet 1 subnet 2 subnet 10
…
8
10 3
49
7 6
5
2
1
8
10 3
49
7 6
5
2
0
8
10 3
49
7 6
5
1
0
7
9 2
38
6 5
4
1
0
subnet 0 subnet 1 subnet 2 subnet 10
…
Figure 7: Angelfish (bottom) and Angelfish Lite (top) networks based on a Petersen graph.
and subnet Y, node X. The result is a 2450-node network with a maximum 5-hop latency and 13 ports per node. Note that this is similar to the Cray Cascade [13], in that it is a complete graph of Flattened Butterfly subnets, with a single link con-necting each subnet.
Figure 9 gives an example of connecting subnets in a “full” configuration. Fishnet interconnects identify subsets of nodes within each subnetwork that are reachable within a sin-gle hop from all other nodes: Flattened Butterflies have nu-merous such subsets, including horizontal groups, vertical groups, diagonal groups, etc. The example in Figure 9 uses horizontal and vertical groups: 98 subnets, numbered 1H..49H and 1V..49V. When contacting an “H” subnet, one uses any node in the horizontal row containing that numbered node. For example, to communicate from subnet 1H to subnet 16H, one connects to any node in the horizontal row containing node 16. To communicate from subnet 1H to subnet 42V, one con-nects to any node in the vertical column containing node 42. Given that Flattened Butterfly networks are constructed out of fully connected graphs in both horizontal and vertical dimen-sions, this means that one can reach a remote subnet in at most two hops. From there, it is a maximum of two hops within the remote subnet to reach the desired target node. For a Flattened Butterfly subnet of NxN nodes, one can build a system of 2N4 nodes with 4N–2 ports per node and a maximum latency of 4
hops. This can be extended even further by allowing diagonal sets as well.
In general, the Angelfish graphs have the following char-acteristics, where p is the number of ports that are used to con-struct the fundamental Moore graph, from which the rest of the network is constructed. As mentioned above with Moore graphs, the number of nodes is an upper bound, unless specific implementations are described, where the numbers are actual.
Angelfish
• Nodes: (p2 + 1)(p2 + 2)• Ports: 2p• Bisection Links: ~ p((p2 + 1) 2 ÷ 4)• Maximum Latency: 4
Angelfish Lite
• Nodes: (p2 + 1)(p2 + 2)• Ports: p+1• Bisection Links: ~ (p2 + 1) 2 ÷ 4• Maximum Latency: 5
In general, the Flying Fish graphs have the following charac-teristics, where n is the length of a side:
Figure 8. Flying Fish Lite network based on a 7x7 Flattened Butterfly subnet — 50 subnets of 49 nodes (2450 nodes, 13 ports each, 5-hop latency). Note that this is the same type of arrangement as the Cray Cascade network.
87 9 10 11 12 13
1514 17 18 19 20 21
10 2 3 4 5 6
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
8 9 10 11 12 137
15 16 17 18 19 2014
22 23 24 25 26 2721
29 30 31 32 33 3428
36 37 38 39 40 4135
1 2 3 4 5 60
44 45 46 47 48 4943
1 2 3 4 5 6 7
8 9 10 11 12 13 14
15 16 17 18 19 20 21
22 23 24 25 26 27 28
29 30 31 32 33 34 35
36 37 38 39 40 41 42
43 44 45 46 47 48 49
subnet 0 subnet 16 subnet 42
… …
Figure 7. Angelfish (bottom) and Angelfish Lite (top) networks based on a Petersen graph.
8
10 3
49
7 6
5
2
1
8
10 3
49
7 6
5
2
0
8
10 3
49
7 6
5
1
0
7
9 2
38
6 5
4
1
0
subnet 0 subnet 1 subnet 2 subnet 10
…
8
10 3
49
7 6
5
2
1
8
10 3
49
7 6
5
2
0
8
10 3
49
7 6
5
1
0
7
9 2
38
6 5
4
1
0
subnet 0 subnet 1 subnet 2 subnet 10
…
Figure 8: Flying Fish Lite network based on a 7x7 Flattened Butterfly subnet – 50 subnets of 49 nodes (2450nodes, 13 ports each, 5-hop latency). Note that this is the same type of arrangement as the Cray Cascadenetwork.
Flying Fish
• Nodes: 2n4
• Ports: 4n – 2• Bisection Links: ~ n(n4) = n5
• Maximum Latency: 4
Flying Fish Lite
• Nodes: n2(n2 + 1)• Ports: 2n – 1• Bisection Links: ~ (n2 + 1)2 ÷ 4• Maximum Latency: 5
III. NETWORK CONNECTIVITY AND AVAILABILITY
With millions of nodes in a network, the reliability of the net-work and the availability of nodes proposes a serious chal-lenge to system designers. A considerable amount of work has been devoted to such issues, from both hardware and software perspectives [14-20]. As Schroeder [14] pointed out, the fail-ure rates of an HPC system is approximately proportional to the number of nodes (or processors) in that system. Thus for a
system building upon millions of nodes, node failure is certain to happen. So in the situation of a node or even a board failure, whether an interconnect topology could provide the ability to reroute to bypass the failed part and allow maintenance and replacement of the failure part is crucial.
Theoretically, all the topologies we have discussed above provide some redundancy in terms of connection—that is, when one node or board/subnet is down, the rest of the net-work is still able to access other functioning parts of the net-work. The question remains is, how easily that could be done?
Figure 10 shows the rerouting schemes to bypass a failed node in different topologies. Note that since the nodes of the flattened butterfly are fully connected, it doesn't require rerout-ing when one node fails; therefore it is not shown in this graph. As could be seen from the graph, assuming in each sit-uation, node 0 is trying to access node 2 through node 1, which is unavailable. A 2D torus has 2 alternative routes to bypass the faulty node, and both take 2 additional hops (4 hops comparing to 2 hops) to get to the destination; a 5-node Moore graph has 1 alternative route, costing 1 additional hop; and a 10-node Petersen graph has 2 alternative routes, costing 1 additional hop. This could be summarized in the following table:
One interesting result here is that, even though a torus network has more hops to reroute over a failed node than other topolo-gies, it has more alternative routes, especially when the num-ber of dimensions grows. This may imply that during the han-dling of a failed node in a torus network, there would be more
Topologies for Subnets Additional Cost in Hops Alternative Routes
nD Torus 2 2 (n – 1)
Flattened Butterfly 0 n/a
5-node Moore 1 1
10-node Petersen 1 2
Figure 10. Rerouting to bypass faulty nodes in 2D torus, 5-node Moore Graph, and a 10-node Petersen Graph. The unavailable route is marked in red; alternative routes marked in green. For simplicity arrows are plotted only in one direction instead of both.
Figure 9. Flying Fish network based on a 7x7 Flattened Butterfly subnet — 98 subnets of 49 nodes (4802 nodes, 26 ports each, 4-hop latency).
98 10 11 12 13 14
1615 17 18 19 20 21
21 3 4 5 6 7
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
…
98 10 11 12 13 14
1615 17 18 19 20 21
21 3 4 5 6 7
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
98 10 11 12 13 14
1615 17 18 19 20 21
21 3 4 5 6 7
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
…
98 10 11 12 13 14
1615 17 18 19 20 21
21 3 4 5 6 7
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
1 2 3 4 5 6 7
8 9 10 11 12 13 14
15 17 18 19 20 21
22 23 24 25 26 27 28
29 30 31 32 33 34 35
36 37 38 39 40 41 42
43 44 45 46 47 48 49
16
subnet 16H
subnet 42H
subnet 16V
subnet 42V
subnet 1H
Figure 9: Flying Fish network based on a 7x7 Flattened Butterfly subnet – 98 subnets of 49 nodes (4802nodes, 26 ports each, 4-hop latency).

Flying Fish
• Nodes: 2n4
• Ports: 4n – 2• Bisection Links: ~ n(n4) = n5
• Maximum Latency: 4
Flying Fish Lite
• Nodes: n2(n2 + 1)• Ports: 2n – 1• Bisection Links: ~ (n2 + 1)2 ÷ 4• Maximum Latency: 5
III. NETWORK CONNECTIVITY AND AVAILABILITY
With millions of nodes in a network, the reliability of the net-work and the availability of nodes proposes a serious chal-lenge to system designers. A considerable amount of work has been devoted to such issues, from both hardware and software perspectives [14-20]. As Schroeder [14] pointed out, the fail-ure rates of an HPC system is approximately proportional to the number of nodes (or processors) in that system. Thus for a
system building upon millions of nodes, node failure is certain to happen. So in the situation of a node or even a board failure, whether an interconnect topology could provide the ability to reroute to bypass the failed part and allow maintenance and replacement of the failure part is crucial.
Theoretically, all the topologies we have discussed above provide some redundancy in terms of connection—that is, when one node or board/subnet is down, the rest of the net-work is still able to access other functioning parts of the net-work. The question remains is, how easily that could be done?
Figure 10 shows the rerouting schemes to bypass a failed node in different topologies. Note that since the nodes of the flattened butterfly are fully connected, it doesn't require rerout-ing when one node fails; therefore it is not shown in this graph. As could be seen from the graph, assuming in each sit-uation, node 0 is trying to access node 2 through node 1, which is unavailable. A 2D torus has 2 alternative routes to bypass the faulty node, and both take 2 additional hops (4 hops comparing to 2 hops) to get to the destination; a 5-node Moore graph has 1 alternative route, costing 1 additional hop; and a 10-node Petersen graph has 2 alternative routes, costing 1 additional hop. This could be summarized in the following table:
One interesting result here is that, even though a torus network has more hops to reroute over a failed node than other topolo-gies, it has more alternative routes, especially when the num-ber of dimensions grows. This may imply that during the han-dling of a failed node in a torus network, there would be more
Topologies for Subnets Additional Cost in Hops Alternative Routes
nD Torus 2 2 (n – 1)
Flattened Butterfly 0 n/a
5-node Moore 1 1
10-node Petersen 1 2
Figure 10. Rerouting to bypass faulty nodes in 2D torus, 5-node Moore Graph, and a 10-node Petersen Graph. The unavailable route is marked in red; alternative routes marked in green. For simplicity arrows are plotted only in one direction instead of both.
Figure 9. Flying Fish network based on a 7x7 Flattened Butterfly subnet — 98 subnets of 49 nodes (4802 nodes, 26 ports each, 4-hop latency).
98 10 11 12 13 14
1615 17 18 19 20 21
21 3 4 5 6 7
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
…
98 10 11 12 13 14
1615 17 18 19 20 21
21 3 4 5 6 7
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
98 10 11 12 13 14
1615 17 18 19 20 21
21 3 4 5 6 7
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
…
98 10 11 12 13 14
1615 17 18 19 20 21
21 3 4 5 6 7
2322 24 25 26 27 28
3029 31 32 33 34 35
3736 38 39 40 41 42
4443 45 46 47 48 49
1 2 3 4 5 6 7
8 9 10 11 12 13 14
15 17 18 19 20 21
22 23 24 25 26 27 28
29 30 31 32 33 34 35
36 37 38 39 40 41 42
43 44 45 46 47 48 49
16
subnet 16H
subnet 42H
subnet 16V
subnet 42V
subnet 1H
Figure 10: Rerouting to bypass faulty nodes in 2Dtorus, 5-node Moore Graph, and a 10-node PetersenGraph. The unavailable route is marked in red; al-ternative routes marked in green. For simplicityarrows are plotted only in one direction instead ofboth.
2. NETWORK AVAILABILITYWith millions of nodes in a network, the reliability of
the network and the availability of nodes proposes a seri-ous challenge to system designers. A considerable amountof work has been devoted to such issues, from both hardwareand software perspectives [15, 22, 5, 19, 14, 18, 1, 9] . AsSchroeder [15] pointed out, the failure rates of an HPC sys-tem is approximately proportional to the number of nodes(or processors) in that system. Thus for a system buildingupon millions of nodes, node failure is certain to happen. Soin the situation of a node or even a board failure, whether aninterconnect topology could provide the ability to reroute tobypass the failed part and allow maintenance and replace-ment of the failure part is crucial.
Theoretically, all the topologies we have discussed aboveprovide some redundancy in terms of connection – that is,when one node or board/subnet is down, the rest of thenetwork is still able to access other functioning parts of thenetwork. The question remains is, how easily that could bedone?
Figure 10 shows the rerouting schemes to bypass a failednode in different topologies. Note that since the nodes ofthe flattened butterfly are fully connected, it doesn’t requirererouting when one node fails; therefore it is not shown inthis graph. As could be seen from the graph, assuming ineach situation, node 0 is trying to access node 2 throughnode 1, which is unavailable. A 2D torus has 2 alternativeroutes to bypass the faulty node, and both take 2 additionalhops (4 hops comparing to 2 hops) to get to the destination;a 5-node Moore graph has 1 alternative route, costing 1 ad-ditional hop; and a 10-node Petersen graph has 2 alternativeroutes, costing 1 additional hop. This could be summarizedin the following table:
Topologies Additional Alternativefor Subnets Cost in Hops Routes
nD Torus 2 2(n− 1)Flattened Butterfly 0 n/a
5-node Moore 1 110-node Petersen 1 2
One interesting result here is that, even though a torusnetwork has more hops to reroute over a failed node thanother topologies, it has more alternative routes, especiallywhen the number of dimensions grows. This may implythat during the handling of a failed node in a torus network,
there would be more latency, but also more bandwidth andless traffic congestion are expected, which may mitigate thelatency issue.
3. COST/PERFORMANCE ANALYSISThis section presents a cost/performance analysis of the
previously described network topologies, in configurationsup to 1 million nodes. As described above, Moore graphsrepresent upper bounds; Fishnet numbers based on Mooregraphs use actual graphs for a basis (i.e., the Angelfish andFlying Fish numbers in this section are all for real graphs,based on published diameter-2 network topologies, and notunachievable upper bounds on characteristics).
Figure 11 compares the port costs of the topologies withrelatively fixed latencies. Instead of having fixed port costs,as in the tori and hypercubes, the port requirements (thenumber of ports per router) for these topologies grow withthe system size, and their average latencies are relativelystable. The Fishnet, Dragonfly, and Flattened Butterflytopologies are compared to the Moore bounds, with Mooregraphs of diameter 2, 3, 4, 5, and 6. In general, low-diameternetworks can be built out to 1,000,000 nodes with a mod-est number of ports: high-diameter Flattened Butterfly de-signs and Fishnet designs will scale to these sizes in under30 router ports (this is “modest” considering that 100-portrouters exist today).
3.1 Ports per Router, Average Latencies,Bisection Bandwidth
The graph in Figure 12 shows the average latencies for thetopologies that have fixed port costs: the torus variations,from 2D to 10D. A node in a torus interconnect has a fixednumber of ports, regardless of the network size, except at 2nodes per side, which is a hypercube. What changes is themaximum and average latency through the network. Onecan see that the average latency grows quickly for a systemof a given dimension, as the length of a side is scaled from2 to 3 to 4, etc. One can also see that a torus with 3 nodeson a side is more efficient than a hypercube with the samenumber of total nodes; this is to be expected, as, given thesame dimension, they both have the same worst-case latency,and a torus with 3 nodes per side has more nodes than onewith 2 per side.
Figure 13 shows bisection bandwidths; the metric is sim-ply the number of links at the narrowest part of the graph,as each link could be any bandwidth, depending on inter-connect technology. The figure in the top left simply plotsbisection bandwidth (in links) against system size, both axeslogarithm scale. As one would expect, the bandwidths growproportionally with the system size: as the system scales byfour orders of magnitude, the bisection bandwidths scale byover five orders of magnitude. Note that data points are ex-cluded where the design would require more than 300 portsor exhibit an average latency over 35 hops; this is true forall following graphs.
Some of the topologies scale their bisection bandwidthfaster than others, and so at the larger system sizes (around100,000 nodes and larger), there is a clear division of topolo-gies: a gap in bandwidth appears between the top and bot-tom groups. The top group includes Moore topologies, Drag-onfly topologies, Flattened Butterfly topologies, Angelfish,Flying Fish, and Angelfish Mesh. These are the topologieswith high port costs, and so it is expected that they would

latency, but also more bandwidth and less traffic congestion are expected, which may mitigate the latency issue.
IV. COST/PERFORMANCE ANALYSIS
This section presents a cost/performance analysis of the previ-ously described network topologies, in configurations up to 1 million nodes. As described above, Moore graphs represent upper bounds; Fishnet numbers based on Moore graphs use actual graphs for a basis (i.e., the Angelfish and Flying Fish numbers in this section are all for real graphs, based on pub-lished diameter-2 network topologies, and not unachievable upper bounds on characteristics).
A. Ports per Router, Average Latencies, Bisection BandwidthFigure 11 compares the port costs of the topologies with rela-tively fixed latencies. Instead of having fixed port costs, as in the tori and hypercubes, the port requirements (the number of ports per router) for these topologies grow with the system size, and their average latencies are relatively stable. The Fishnet, Dragonfly, and Flattened Butterfly topologies are compared to the Moore bounds, with Moore graphs of diame-ter 2, 3, 4, 5, and 6. In general, low-diameter networks can be built out to 1,000,000 nodes with a modest number of ports: high-diameter Flattened Butterfly designs and Fishnet designs will scale to these sizes in under 30 router ports (this is “mod-est” considering that 100-port routers exist today). The Drag-onfly networks do not scale as well and require more ports to
build out a system, requiring hundreds of ports to reach be-yond 10,000 nodes.
The graph in Figure 12 shows the average latencies for the topologies that have fixed port costs: the torus variations, from 2D to 10D. A node in a torus interconnect has a fixed number of ports, regardless of the network size, except at 2 nodes per side, which is a hypercube. What changes is the maximum and average latency through the network. One can see that the average latency grows quickly for a system of a given dimension, as the length of a side is scaled from 2 to 3
Figure 11. Ports costs for max-diameter graphs.
Figure 12. Average latencies of topologies.
Figure 11: Ports costs for max-diameter graphs.
latency, but also more bandwidth and less traffic congestion are expected, which may mitigate the latency issue.
IV. COST/PERFORMANCE ANALYSIS
This section presents a cost/performance analysis of the previ-ously described network topologies, in configurations up to 1 million nodes. As described above, Moore graphs represent upper bounds; Fishnet numbers based on Moore graphs use actual graphs for a basis (i.e., the Angelfish and Flying Fish numbers in this section are all for real graphs, based on pub-lished diameter-2 network topologies, and not unachievable upper bounds on characteristics).
A. Ports per Router, Average Latencies, Bisection BandwidthFigure 11 compares the port costs of the topologies with rela-tively fixed latencies. Instead of having fixed port costs, as in the tori and hypercubes, the port requirements (the number of ports per router) for these topologies grow with the system size, and their average latencies are relatively stable. The Fishnet, Dragonfly, and Flattened Butterfly topologies are compared to the Moore bounds, with Moore graphs of diame-ter 2, 3, 4, 5, and 6. In general, low-diameter networks can be built out to 1,000,000 nodes with a modest number of ports: high-diameter Flattened Butterfly designs and Fishnet designs will scale to these sizes in under 30 router ports (this is “mod-est” considering that 100-port routers exist today). The Drag-onfly networks do not scale as well and require more ports to
build out a system, requiring hundreds of ports to reach be-yond 10,000 nodes.
The graph in Figure 12 shows the average latencies for the topologies that have fixed port costs: the torus variations, from 2D to 10D. A node in a torus interconnect has a fixed number of ports, regardless of the network size, except at 2 nodes per side, which is a hypercube. What changes is the maximum and average latency through the network. One can see that the average latency grows quickly for a system of a given dimension, as the length of a side is scaled from 2 to 3
Figure 11. Ports costs for max-diameter graphs.
Figure 12. Average latencies of topologies.
Figure 12: Average latencies of torus.
have higher bisection bandwidths. The bottom group in-cludes Angelfish L-Mesh, Angelfish Lite, Flying Fish Lite,and all of the tori from 2D to 10D. The divide can be seenmore clearly in the bottom right graph of Figure 13, whichpresents bisection bandwidth scaled by the system size.
The second graph in Figure 13 shows how efficiently aparticular topology can produce bisection bandwidth: thisis the ratio of bisection bandwidth to system size. This
explains the various curves seen in the previous graph: atthe top, including Moore and Flattened Butterfly topolo-gies, Angelfish, Flying Fish, and Angelfish Mesh, the curvesgrow with system size: i.e., the curves have positive slope,and the bisection bandwidth grows faster than the systemsize. In addition, topologies such as the Dragonfly varia-tions, Angelfish Lite, and Flying Fish Lite, have designs withcompletely flat curves, indicating topologies whose bisectionbandwidth scales at the same pace as the system size. All ofthe tori, from 2D to 10D, have downward slopes, indicatingthat the bisection bandwidth grows more slowly than thesystem size.
An interesting point is that all topologies other than thetori have lower bandwidth per node as the dimension (andthus the diameter) grows: for instance, the 2-hop Mooreand Flattened Butterfly networks are coincident, as are the3-hop Moore and Flattened Butterfly networks, as are the4-hop Moore, Flattened Butterfly, and Angelfish networks.Each of these has a shallower slope than the one before it:as dimension and diameter grows, the bisection bandwidthgrows less rapidly with the system size. The tori are a mirrorimage of this: as the dimension grows from 2D to 3D andbeyond to 10D, the curves grow flatter in the positive direc-tion, indicating that each has bisection bandwidth that isgrowing more and more rapidly with system size. They stilldo not grow as rapidly as the Moore, Flattened Butterfly,and Fishnet topologies, but it is encouraging that tori be-come better choices the larger their dimension, as the largerdimensions are the only ones that scale to extremely large

to 4, etc. One can also see that a torus with 3 nodes on a side is more efficient than a hypercube with the same number of total nodes; this is to be expected, as, given the same dimension, they both have the same worst-case latency, and a torus with 3 nodes per side has more nodes than one with 2 per side.
Figure 13 shows bisection bandwidths; the metric is sim-ply the number of links at the narrowest part of the graph, as each link could be any bandwidth, depending on interconnect technology. The figure in the top left simply plots bisection bandwidth (in links) against system size, both axes logarithm scale. As one would expect, the bandwidths grow proportion-ally with the system size: as the system scales by four orders of magnitude, the bisection bandwidths scale by over five or-ders of magnitude. Note that data points are excluded where the design would require more than 300 ports or exhibit an average latency over 35 hops; this is true for all following graphs.
Some of the topologies scale their bisection bandwidth faster than others, and so at the larger system sizes (around 100,000 nodes and larger), there is a clear division of topolo-gies: a gap in bandwidth appears between the top and bottom groups. The top group includes Moore topologies, Dragonfly topologies, Flattened Butterfly topologies, Angelfish, Flying Fish, and Angelfish Mesh. These are the topologies with high port costs, and so it is expected that they would have higher bisection bandwidths. The bottom group includes Angelfish L-Mesh, Angelfish Lite, Flying Fish Lite, and all of the tori from 2D to 10D. The divide can be seen more clearly in the bottom right graph of Figure 13, which presents bisection bandwidth scaled by the system size.
The second graph in Figure 13 shows how efficiently a particular topology can produce bisection bandwidth: this is the ratio of bisection bandwidth to system size. This explains the various curves seen in the previous graph: at the top, in-cluding Moore and Flattened Butterfly topologies, Angelfish,
Figure 13. Left: Bisection bandwidth for all topologies, in terms of links intersected; note the log scale on the y-axis—at nearly all network sizes, there is a two-order-of-magnitude spread in bisection bandwidth, and the spread grows larger with system size. Right: Bisection scaled by system size. This highlights the difference between topologies whose bisection sales faster system size (positive slopes), those that scale more slowly than system size (negative slopes), and those that scale at exactly the same rate (flat slopes).
Figure 13: Left: Bisection bandwidth for all topologies, in terms of links intersected; note the log scale onthe y-axis – at nearly all network sizes, there is a two-order-of-magnitude spread in bisection bandwidth,and the spread grows larger with system size. Right: Bisection scaled by system size. This highlights thedifference between topologies whose bisection sales faster system size (positive slopes), those that scale moreslowly than system size (negative slopes), and those that scale at exactly the same rate (flat slopes).
network sizes.
3.2 Bisection by Ports x LatencyIn general, to characterize each system, metrics of interest
include bisection bandwidth, average latency, and the num-ber of ports per router, as well as number of nodes. Ideally,one would produce a 3D Pareto surface for each decade ofsystem size to study this design space, but that is difficultto visualize. Instead, we look at a slice through that spaceby projecting the 3D surface onto one dimension, combiningbisection bandwidth, average latency, and ports-per-routercost into one metric. The metric is bisection bandwidthdivided by ports and latency; because bisection bandwidthgrows much, much faster than the number of ports or theaverage latency through the network, we scale the metric bythe system size. Higher numbers are better.
This metric indicates that, if one interconnect requires
twice the number of ports as another, but it has half thelatency, the two would be considered equal. If one intercon-nect has half the average latency as another, but it also hashalf the bisection bandwidth, the two would be consideredequal. If one interconnect has twice the average latency asanother, but it only requires half the ports per router, thetwo would be considered equal. The topologies are comparedin Figure 14.
As one can see, there is tremendous variation across thetopologies considered. The Moore graphs represent the bound:one cannot achieve a lower port cost at a given diameter, andthus the ports-latency product for Moore graphs is the bestachievable. However, some graphs have higher bisection, es-pecially as they use more ports, and so the“efficiency”valuescan be higher than those of the Moore bounds. A good ex-ample of this is the set of diameter-3 Dragonfly variationsup near the Dragonfly Limit curve. In this region, the bisec-

limit. Novel topologies based on Fishnet, in particular the An-gelfish design, become efficient at very large sizes (hundreds of thousands of nodes).
One of the most surprising results is that, at the truly ex-treme scales, high-dimensional tori become the most efficient designs; this, despite the common wisdom that tori do not fare well at large sizes — while that sentiment might hold for 2D and 3D tori, the higher dimensions are extremely powerful designs.
ACKNOWLEDGMENTS
This work was supported in part by the Department of Energy under the Data Movement Dominates project, and in part by Northrop Grumman under the NCTA Cold Logic program.
REFERENCES
[1] P. Kogge, K. Bergman, S. Borkar, D. Campbell, W. Carl-son, W. Dally, M. Denneau, P. Franzon, W. Harrod, K. Hill, J. Hiller, S. Karp, S. Keckler, D. Klein, R. Lucas, M. Richards, A. Scarpelli, S. Scott, A. Snavely, T. Sterling, et al. (2008). ExaScale Computing Study: Technology Chal-
lenges in Achieving Exascale Systems. Defense Advanced Research Projects Agency.
[2] J. Shalf, S. Dosanjh, and J. Morrison (2010). “Exascale computing technology challenges.” In High Performance Computing for Computational Science--VECPAR 2010, pp. 1-25. Springer.
[3] M. Besta and T. Hoefler (2014). “Slim fly: A cost effective low-diameter network topology.” In Proceedings of the International Conference for High Performance Comput-ing, Networking, Storage and Analysis, pp. 348-359. No-vember 2014.
[4] R. Murphy (2007). “On the effects of memory latency and bandwidth on supercomputer application performance.” In 10th IEEE International Symposium on Workload Characterization (IISWC 2007), pp. 35-43. September 2007.
[5] C.E. Leiserson (1985). “Fat-trees: Universal networks for hardware-efficient supercomputing.” IEEE Transactions on Computers, 100(10), 892-901.
Figure 14. Bisection per Ports-Latency Product, scaled by System Size. The bottom right graph combines all others into one.Figure 14: Bisection per Ports-Latency Product, scaled by System Size. The bottom right graph combinesall others into one.
tion of the network is high because the port costs are high(from right to left, we have Dragonfly networks where anadditional 128, 64, 32, etc. links are used to connect eachsubnetwork, which thereby increases bisection bandwidth bya factor of 128, 64, 32, etc.), and in this region, up to about1000 nodes, the Dragonfly topologies have higher“efficiency”than the diameter-3 Moore bound.
The Flattened Butterfly designs have very good efficiency,and they scale out to the largest network sizes by increasingdimension and thus diameter. For instance, a diameter-3Butterfly can be built with 100,000 nodes, requiring 140ports, and one can scale it to half a million nodes, requiring240 ports. The design has a high efficiency value because itslatency is low and its bisection bandwidth is high.
In the same efficiency neighborhood is a diameter-4 net-work, the Angelfish design, which scales to 100,000 nodes at38 ports, to 500,000 nodes at 58 ports, and to 1.1 millionnodes at 70 ports. This achieves roughly the same efficiencyby having a factor-of-two lower port costs, a factor-of-twolower bisection bandwidth, and 4:3 ratio for average latency.The lower port costs enables it to scale to much larger sys-tem sizes for the same port costs.
Thus, out at the largest system sizes, the Fishnet-based
topologies (specifically the Angelfish variants) are the mostefficient. If one were to follow the curves out far beyondthe edge if the graphs shown here, as the network sizes scalelarger and larger, the designs that require more ports forlarger sizes, all drop out, leaving only the highest-dimensionaltori.
3.3 Cycle-Accurate SimulationsTo compare how the different topologies handle all-to-all
traffic, we simulated them using a modified version of Book-sim [9] , a widely used, cycle-accurate simulator for intercon-nect networks. It provides a set of built-in topology modelsand offers the flexibility for custom topologies by accept-ing a netlist. The tool uses Dijkstra’s algorithm to buildthe minimum-path routing tables for those configurationsthat are not in its set of built-in topologies. We simulatedinjection mode with a uniform traffic pattern. The config-urations simulated include the topologies described earlier,as well as 2-hop Moore graphs labeled “MMS2.” These latternetworks are not bounds but graphs, the same graphs usedto construct the Angelfish networks studied in this analysissection; they represent sizes from 18 to 5618 nodes.
The results are shown in Figure 15, which presents aver-

D. Cycle-Accurate SimulationsTo compare how the different topologies handle all-to-all traf-fic, we simulated them using a modified version of Booksim [25], a widely used, cycle-accurate simulator for interconnect networks. It provides a set of built-in topology models and offers the flexibility for custom topologies by accepting a netlist. The tool uses Dijkstra's algorithm to build the mini-mum-path routing tables for those configurations that are not in its set of built-in topologies. We simulated injection mode with a uniform traffic pattern. The configurations simulated include the topologies described earlier, as well as 2-hop Moore graphs labeled “MMS2.” These latter networks are not bounds but graphs, the same graphs used to construct the An-gelfish networks studied in this analysis section; they represent sizes from 18 to 5618 nodes.
The results are shown in Figure 14, which presents aver-age network latency, including transmission time as well as time spent in queues at routers. The figure shows the same graph twice, at different y-axis scales. The left graph shows enough data points to see the sharply increasing slope of the low-dimension tori. The graph on the right shows details of the graphs with the lowest average latencies. There are several things to note. First, it is clear that, at the much higher dimen-sions, the high-D tori will have latencies on the same scale as the other topologies. Second, the Dragonfly networks are shown scaled out beyond 100,000 nodes, which requires sev-eral hundred ports per node, assuming routers are integrated on the CPU. Our simulations show that a configuration using an external router would incur an order of magnitude higher latencies due to congestion at the routers and longer hop
counts. The Angelfish and Angelfish Mesh networks at this scale require 38 and 21 ports per node, respectively. Third, the 3D/4D Flattened Butterfly designs have identical physical organization as the 3D/4D tori; they simply use many more wires to connect nodes in each dimension. One can see the net effect: the Flattened Butterfly designs have half the latency of the same-sized tori.
VI. CONCLUSIONS
There is a clear set of design options to choose from, given the balance between the desire for low average interconnect laten-cy and the desire to reduce the number of wires connecting each router chip. Extremely low latencies (e.g., 2–3 hops) are certainly possible: two hops can be maintained into the tens of thousands of nodes; three hops can be achieved at system sizes in the range of 1,000,000 nodes; four hops can be maintained through system sizes approaching 1 billion nodes. The cost for a network is latency and the number of ports per router. If one can live with longer latencies, the port requirements can be reduced significantly. If one can live with higher port costs, latencies can be reduced significantly.
REFERENCES
[1] P. Kogge, K. Bergman, S. Borkar, D. Campbell, W. Carlson, W. Dally, M. Denneau, P. Franzon, W. Harrod, K. Hill, J. Hiller, S. Karp, S. Keckler, D. Klein, R. Lucas, M. Richards, A. Scarpelli, S. Scott, A. Snavely, T. Sterling, et al. (2008). ExaScale Com-puting Study: Technology Challenges in Achieving Exascale Systems. Defense Advanced Research Projects Agency.
�10
Figure 14. Simulations of network topologies under constant load; the MMS2 graphs are the 2-hop Moore graphs based on MMS techniques that were used to construct the Angelfish networks.Figure 15: Simulations of network topologies under constant load; the MMS2 graphs are the 2-hop Moore
graphs based on MMS techniques that were used to construct the Angelfish networks.
age network latency, including transmission time as well astime spent in queues at routers. The figure shows the samegraph twice, at different y-axis scales. The left graph showsenough data points to see the sharply increasing slope ofthe low-dimension tori. The graph on the right shows de-tails of the graphs with the lowest average latencies. Thereare several things to note. First, it is clear that, at the muchhigher dimensions, the high-D tori will have latencies on thesame scale as the other topologies. Second, the Dragonflynetworks are shown scaled out beyond 100,000 nodes, whichrequires several hundred ports per node, assuming routersare integrated on the CPU. Our simulations show that aconfiguration using an external router would incur an or-der of magnitude higher latencies due to congestion at therouters and longer hop counts. The Angelfish and AngelfishMesh networks at this scale require 38 and 21 ports pernode, respectively. Third, the 3D/4D Flattened Butterflydesigns have identical physical organization as the 3D/4Dtori; they simply use many more wires to connect nodes ineach dimension. One can see the net effect: the FlattenedButterfly designs have half the latency of the same-sized tori.
4. CONCLUSIONSThere is a clear set of design options to choose from, given
the balance between the desire for low average interconnectlatency and high bisection bandwidth, and the desire to re-duce the number of wires connecting each router chip. Ex-tremely low latencies (e.g., 2 - 3 hops) are certainly possi-ble: two hops can be maintained into the tens of thousandsof nodes; three hops can be achieved at system sizes in therange of 500,000 nodes; four hops can be maintained beyond1 million nodes. The cost for a network is latency and the
number of ports per router. If one can live with longer la-tencies or lower bisection bandwidths, the port requirementscan be reduced significantly. On the flip side, if one can livewith higher port costs, latencies can be reduced significantly,and bisection bandwidths can be increased significantly. Inother words, the “best” topology is not a constant but in-stead changes with the system size. Router ports can bespent to increase bisection bandwidth, reduce latency (net-work/graph diameter), and increase total system size: anytwo can be improved at the expense of the third.
Flattened Butterfly networks match and exceed the bi-section bandwidth curves set by Moore bounds and scalewell to large sizes by increasing dimension and thus diame-ter. Dragonfly networks in which the number of inter-grouplinks is scaled have extremely high bisection bandwidth andmatch that of the Moore bound when extrapolated to theirdiameter-2 limit. Novel topologies based on Fishnet, in par-ticular the Angelfish design, become efficient at very largesizes (hundreds of thousands of nodes).
One of the most surprising results is that, at the trulyextreme scales, high-dimensional tori become the most ef-ficient designs; this, despite the common wisdom that torido not fare well at large sizes – while that sentiment mighthold for 2D and 3D tori, the higher dimensions are extremelypowerful designs.
AcknowledgmentsThis work was supported in part by the Department of En-ergy under the Data Movement Dominates project, and inpart by Northrop Grumman under the NCTA Cold Logicprogram.

5. REFERENCES[1] Y. Ajima, S. Sumimoto, and T. Shimizu. Tofu: A 6d
mesh/torus interconnect for exascale computers.Computer, 42(11):0036–41, 2009.
[2] W.-T. Bao, B.-Z. Fu, M.-Y. Chen, and L.-X. Zhang. Ahigh-performance and cost-efficient interconnectionnetwork for high-density servers. Journal of computerscience and Technology, 29(2):281–292, 2014.
[3] J. Bermond, J. Bond, M. Paoli, and C. Peyrat.Graphs and interconnection networks: diameter andvulnerability. In Surveys in combinatorics, volume 82,pages 1–30. Cambridge University Press Cambridge,1983.
[4] M. Besta and T. Hoefler. Slim fly: a cost effectivelow-diameter network topology. In Proceedings of theInternational Conference for High PerformanceComputing, Networking, Storage and Analysis, pages348–359. IEEE Press, 2014.
[5] F. Cappello, A. Geist, B. Gropp, L. Kale, B. Kramer,and M. Snir. Toward exascale resilience. InternationalJournal of High Performance Computing Applications,2009.
[6] G. Faanes, A. Bataineh, D. Roweth, E. Froese,B. Alverson, T. Johnson, J. Kopnick, M. Higgins,J. Reinhard, et al. Cray cascade: a scalable hpcsystem based on a dragonfly network. In Proceedingsof the International Conference on High PerformanceComputing, Networking, Storage and Analysis, page103. IEEE Computer Society Press, 2012.
[7] A. J. Hoffman and R. R. Singleton. On moore graphswith diameters 2 and 3. IBM Journal of Research andDevelopment, 4(5):497–504, 1960.
[8] B. Jacob. The 2 petaflop, 3 petabyte, 9 tb/s, 90 kwcabinet: A system architecture for exascale and bigdata.
[9] N. Jiang, J. Balfour, D. U. Becker, B. Towles, W. J.Dally, G. Michelogiannakis, and J. Kim. A detailedand flexible cycle-accurate network-on-chip simulator.In Performance Analysis of Systems and Software(ISPASS), 2013 IEEE International Symposium on,pages 86–96. IEEE, 2013.
[10] J. Kim, W. J. Dally, S. Scott, and D. Abts.Technology-driven, highly-scalable dragonfly topology.In ACM SIGARCH Computer Architecture News,volume 36, pages 77–88. IEEE Computer Society,2008.
[11] P. Kogge, K. Bergman, S. Borkar, D. Campbell,W. Carson, W. Dally, M. Denneau, P. Franzon,W. Harrod, K. Hill, et al. Exascale computing study:Technology challenges in achieving exascale systems.2008.
[12] C. E. Leiserson. Fat-trees: universal networks forhardware-efficient supercomputing. IEEE transactionson Computers, 100(10):892–901, 1985.
[13] R. Murphy. On the effects of memory latency andbandwidth on supercomputer application performance.In 2007 IEEE 10th International Symposium onWorkload Characterization, pages 35–43. IEEE, 2007.
[14] A. B. Nagarajan, F. Mueller, C. Engelmann, and S. L.Scott. Proactive fault tolerance for hpc with xenvirtualization. In Proceedings of the 21st annualinternational conference on Supercomputing, pages
23–32. ACM, 2007.
[15] B. Schroeder and G. Gibson. A large-scale study offailures in high-performance computing systems. IEEETransactions on Dependable and Secure Computing,7(4):337–350, 2010.
[16] J. Shalf, S. Dosanjh, and J. Morrison. Exascalecomputing technology challenges. In InternationalConference on High Performance Computing forComputational Science, pages 1–25. Springer, 2010.
[17] J. S. Smith. Distributed two-dimensional FourierTransforms on DSPs: With an applications for phaseretrieval. PhD thesis, 2006.
[18] C. Wang, F. Mueller, C. Engelmann, and S. L. Scott.Proactive process-level live migration in hpcenvironments. In Proceedings of the 2008 ACM/IEEEconference on Supercomputing, page 43. IEEE Press,2008.
[19] C. Wang, Z. Zhang, X. Ma, S. S. Vazhkudai, andF. Mueller. Improving the availability ofsupercomputer job input data using temporalreplication. Computer Science-Research andDevelopment, 23(3-4):149–157, 2009.
[20] Wikipedia. Table of the largest known graphs of agiven diameter and maximal degree, 2016. [Online;accessed 27-March-2016].
[21] W. A. Wulf and S. A. McKee. Hitting the memorywall: implications of the obvious. ACM SIGARCHcomputer architecture news, 23(1):20–24, 1995.
[22] J. Yang, D. B. Minturn, and F. Hady. When poll isbetter than interrupt. In FAST, volume 12, pages 3–3,2012.