-
7/24/2019 Computational Aeroelasticity
1/14
JOURNAL OFAIRCRAFTVol. 40, No. 5, SeptemberOctober 2003
Computational Aeroelasticity: Success, Progress, Challenge
David M. Schuster
NASA Langley Research Center, Hampton, Virginia 23681
D. D. Liu
Arizona State University, Tempe, Arizona 85287and
Lawrence J. Huttsell
U.S. Air Force Research Laboratory, WrightPatterson Air Force
Base, Ohio 45433
Introduction
N EARLY 70 years ago, Theodorsen1 published a now famous
report outlining, in detail, an analytical method by which
theutter characteristics of airfoils with two or three degrees of
free-dom could be theoretically calculated. This development laid
thegroundwork for what has become a rich area of research in
theoret-ical aeroelasticity.
Recently, the term computational aeroelasticity (CAE) has
beencoined,and thetermgenerallyisusedto referto
thecouplingofhigh-level computational uid dynamics (CFD) methods to
structuraldynamics tools to perform aeroelasticanalysis. However,
given thelargebody of researchthathas led us to this point,it is
inappropriateto constrain the denition of CAE in this fashion.
Dr. David Schuster is the Technical Lead for the Theoretical
Aeroelasticity Group within the Aeroelasticity
Branch (AB) a t NASA Langley Research Center (LaRC). He received
his B.S. degree in aerospace engineeringfrom the University of
Cincinnati, and his M.S. and Ph.D. degrees from the Georgia
Institute of Technology.After a career of nearly 20 years in
industry and academia, Dr. Schuster joined NASA Langley in 1997,
where
he is responsible for the development and application of
advanced computational aeroelasticity and unsteadyaerodynamics
methods. He also provides analysis support and participates in
aeroelastic testing in the LaRC
Transonic Dynamics Tunnel. Dr. Schusters previous experience
includes computational methods developmentand applicationsat
Lockheed Martin Aeronautical Systems and the Georgia Tech Research
Institute. His researchhas included analysisof high-lift systems,
the NationalAerospace Plane, HighSpeed Civil Transport, Abrupt
Wing
Stall, X-43 aeroelasticity, and the a pplication of NavierStokes
aeroelastic methods to the design a nd analysis ofhigh-performance
and transport aircraft.
Danny D.Liu holdsa Ph.D. in aeronauticsand astronautics from
theUniversity of Southampton,U.K., an M.S.in
aerospace engineering from Georgia Institute of Technology, and
a B.S. in mechanical engineering from National
Taiwan University. Dr. Liu has been a Professor at Arizona State
University in the Mechanical and Aerospace
Engineering Department since 1982. He is a lso the founder and
the president o f ZONA Technology, Inc. Dr. Liu
is an author/co-author of over 90 technical papers and reports,
mostly in unsteady aerodynamics, aeroelasticity,
and structural dynamics of ight vehicles. He is a Fellow of
AIAA.
Lawrence Huttsell is the Aeroelasticity Team Leader in the
Design and Analysis Methods Branch, StructuresDivision, Air
Vehicles Directorate, Air Force Research Laboratory at
WrightPatterson AFB, Ohio. He received aB.S.in mechanical
engineering from theUniversity of Louisville in 1967 and an M.S.in
aeronautical and astronau-
tical engineering from the Ohio State University in 1972.He has
considerable experience in unsteady aerodynamic,aeroelasticity, and
aeroservoelasticity. He has led several national and international
programs: unsteady pressuremeasurementp rograms with the
Netherlands, activeutter suppression wind tunnel tests
(Germany,France, Eng-
land, & Israel) and a USAF/German ight test demonstration,
and a joint AF/NASA NASP government workpackage for panel utter. He
has served on Executive Independent Review Teams and consulted on
system prob-lems in the area of unsteady
aerodynamics,aeroelasticity, buffet, and aeroservoelasticity.He is
currently leadingan
in-houseteam forcomputationalaeroelasticity.He has over70
publications,eight of which arein archival journals.
He is an Associate Fellow of AIAA.
Presented as Paper 2003-1725 at the AIAA Dynamics Specialists
Conference, Norfolk, VA, 07 April 2003; received 16 April 2003;
revision received 12 May2003; accepted for publication 13 May 2003.
This material is declared a work of the U.S. Government and is not
subject to copyright protection in the UnitedStates. Copies of this
paper may be made for personal or internal use, on condition that
the copier pay the $10.00 per-copy fee to the Copyright
ClearanceCenter, Inc., 222 Rosewood Drive, Danvers, MA 01923;
include the code 0021-8669/03 $ 10.00 in correspondence with the
CCC.
This article asserts a much broader denition of the term, one
inwhichCAE encompassesalllevelsof aeroelasticanalysis.Aeroelas-tic
tools based on both linear unsteadyaerodynamicsand nonlinearCFD
methods have been developed and successfully applied. Werefer to
both of these methodologies as components of CAE.
Like-wisestructuralmodelingas simple as beamtheory to
state-of-the-artnite element modeling (FEM) have been incorporated
into aeroe-lastic tools, and these techniquesshould also be
included under theCAE heading.
It is not the intention of this article to provide an
exhaustivehistory of the development and application of CAE over
the past70 years. Rather, the subject will be examined in the
context oftwo primary themes: 1) aeroelastic problems requiring
theoretical
843
-
7/24/2019 Computational Aeroelasticity
2/14
844 SCHUSTER, LIU, AND HUTTSELL
investigation and 2) strategies and techniques attacking
theseproblems.
The discussionwill be brokeninto
threedistinctcategories.Prob-lems that are relatively well
understood and associated CAE toolsthat are viewed as mature and
accepted for these types of problemswill be discussed as the
successes of CAE. Emerging, less
under-stoodaeroelasticproblemswhere CAE has beenappliedon a
limitedbasis, or a one-of-a-kind application of CAE, will be
examined asprogress in CAE. Finally, problems which continueto
contest CAE
methodology and roadblocks to the future development and
appli-cation of CAE will be discussed as the challenges to CAE.
This categorizationprovides a reasonableroadmap for the
futuredevelopment of CAE. The successes provide us with a template
forfuture development. They represent the tools that the user
commu-nity is willing to employ on a day-to-day basis, and the
problemsthat are important to the developmentof currentaerospace
vehicles.The progresscategorizationillustratesthe typesof
problemsthat arebeginning to limit the development and/or
performance of vehiclesand analysis techniquesthat can be
developedby stretchingthe cur-rent technology. The challenge
categorization provides a target orfocus for future
development.Even with todays advancedmethod-ologiesand
computationalcapability,there are problemsthat cannotbe accurately
or efciently modeled using current techniques, par-
ticularly in the area of nonlinear unsteady aerodynamics.Each of
these areas will be discussedin detailwith specic exam-
ples illustratingthe various assertions.Finally, our viewof the
grandchallenge to the future development of CAE methodology will
beoutlined and discussed.
Successes in CAE
Despite the complexity of coupling three distinct
engineeringdisciplines, aerodynamics, structures, and dynamics into
a uniedaeroelasticanalysis capability,
computationalaeroelasticityhas en-
joyed a signicant number of su ccesses over its course of
develop-ment.Today, every crewed vehicle that ies through our
atmosphereundergoes some level of aeroelasticanalysisbefore ight.
Virtuallyevery major uncrewed ight vehicle is similarly
analyzed.
Flutter is a catastrophic aeroelastic phenomenon that must
beavoided at all costs, and all ight vehicles must be clear of
ut-ter and many other aeroelastic phenomena in their ight
envelope.Flight and wind-tunnel testing are two ways to clear a
vehicle forutter, but both are expensive and occur late in the
design process.Therefore, engineers rely heavily on computational
methods to as-sess the aeroelastic characteristics of ight
vehicles. The successesof CAE are rooted in this aeroelastic
characterizationproc ess.
Problem Formulation
When examining the subject of CAE, one cannot overlook thesimple
eleganceof theformulationof theproblem.The developmentof the
generalized aeroelastic equations of motion is enabling for
most modern CAE tools and should be viewed as one of the
truesuccesses in CAE. The generalizedaeroelasticequationsof
motionare given by
[M]f Rq.t/g C[D]f Pq.t/g C[ K]fq.t/g D f F.t/g (1)
fw.x;y;z; t/g D
NmodesX
i D1
qi .t/fi.x;y;z/g (2)
wherefw.x;y;z; t/gis the structural displacement at any
positionand time on the vehicle and fq.t/gis the so-called
generalized dis-placement vector, both of which are simply
geometric propertiesdescribingthe time history of the
aeroelasticdeformation.[M], [D],and [K] are the generalized mass,
damping, and stiffness matrices,respectively, and i represents the
normal modes of the structure.These terms result purely from the
structural and mass propertiesof the vehicle. Thef F.t/gterm is the
generalized force vector andrepresents the coupling of the unsteady
aerodynamics and inertialloads with the structural dynamics. Thus,
the coupled aeroelasticequations of motion comprise distinct terms
that can be related to
the structures, aerodynamics,and dynamics disciplines that are
re-quired to formulate the problem. This allows great exibility in
thechoice of methods that can be used to model a given system.
Forinstance, for linear structural models, the generalized mass,
damp-ing, and stiffness matrices are constants that do not vary
with timeor the structural deformation. This remains true
independent of theaerodynamics chosen for representation of the
generalized force.Thus, the structural and aerodynamic models under
this formula-tion remain completelyindependentof each other.
Varyinglevelsof
delity, sometimes termed variable delity modeling, of
structuraland aerodynamic modeling can be readily matched to the
prob-lem under analysis without changingthe overall formulationof
theequations of motion.
This mix and match characteristic is exploited quite
regularlythroughthe choice of the unsteady aerodynamicsimulation
used toconstruct the generalized force term. This term has been
modeledusing aerodynamics methods that range from linear doublet
latticeandkernelfunctionsolutionsin the frequencydomainto
solutionofthe three -dimensional unsteady Reynolds averaged
NavierStokes(RANS) equations in the time domain. When both the
structuresand aerodynamics are linear, solution of the generalized
aeroelas-tic equations of motion reduces to computation of the
complexeigenvalues of the stability matrix, whose values determine
the
stability of the system. Computations involving nonlinear
aerody-namics and/or structures are typically performed in the time
do-main, which tend to complicate the process of determining
systemstability, but nevertheless stem from the same formulation of
theproblem.
This unique formulation of the equations of motion also
facili-tatesthe systematicevaluationof an aeroelasticsystem.
Virtually allaeroelastic analyses begin with an analysis of the
system stabilitythat involves the use of linear structural and
aerodynamic mod-els. As critical points in the aircraft design
and/or ight envelopeare identied, the analysis can be, and
regularly is, rened throughincorporation of higher delity
structural or aerodynamic models,as appropriate. This approach to
the analysis provides the design-ers with an improved condence that
the design will be free from
aeroelastic anomalies throughout the ight envelope. In
addition,the approach provides designers with important data
regarding thesensitivity of the design to nonlinear effects.
Subsonic/Supersonic Aeroelastic Analysisof General Aircraft
Congurations
Linear subsonic and supersonic aeroelastic analysis of
generalaircraft congurationshas matured over the last 20 years,and
thesetypes of computationsare performedroutinelytoday. Tools are
nowcommercially available that allow aeroelastic modeling and
analy-sis to be performeddirectly from existingstructuralFEM.
Trimmedstatic aeroelasticity, utter, divergence, gust response, and
aeroser-voelastic response are among the simulations that can be
readilycomputed using these tools.
Linear
analysestypicallyinvolvemodelingcomplexsystemswitheithersimplied
geometricor physical properties.In the case of lin-ear aeroelastic
analysis, the physics of the problem are modeled ata lower delity
so that the problem can be linearized. Geometricapproximations are
usually introduced into the aeroelastic modelsas well, but, in
general, these methods are capable of modeling rel-atively
complete, geometrically complex congurations. The ma-
jority of modern linear aeroela stic methods are highly
developedtools that provide the user with a broad range of
functionality andanalysisoptions.The methods
arecomputationallyefcient,makingthem expedient as rapid analysis
and multidisciplinary design andoptimization (MDO) tools. They also
have the desirable propertythat classical problems with exact
solutions can usually be easilymodeled, signicantly simplifying the
verication tasks for newlydeveloped methods.
Two types of linear aeroelastic analysis will be highlighted
here.The rst describes examples of linear utter analysis using
thesetechniques. The second discusses linear aeroservoelastic and
gustresponse simulations.
-
7/24/2019 Computational Aeroelasticity
3/14
SCHUSTER, LIU, AND HUTTSELL 845
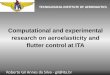
Fig. 1 X-43A utter analysis.
Linear Flut ter Analysis
An example utter analysis of the X-43A research and launch
vehicle is shown in Fig. 1. In this case the complete X-43A
hy-personic research and launch vehicles were modeled
structurallyusing FEM techniques. The model for this portion of the
analy-sis is shown in the upper-left portion of Fig. 1. A normal
modesstructural dynamics analysis was performed to obtain
rigid-bodyand structurally exible mode shapes and frequencies as
shown inthe lower-left portion of Fig. 1. The model for the
unsteady aero-dynamics portion of the analysis is shown in the
upper-right cor-ner. For this analysis, doublet lattice2
aerodynamics was used inthe subsonic ight regime, whereas the
ZONA51 (Ref. 3) linearunsteady aerodynamics methodology was used in
the supersonicregime.
Mode shapes from the structural dynamics analysis are
interpo-latedontothe aerodynamicsgrid usinga
surfacespliningtechnique.4
This allows the generalized aerodynamic force term of Eq. (1)
tobe computed directly from the unsteady aerodynamic analysis.
Fi-nally, the resulting utter analysis obtained at a xed Mach
numberis shown in the lower-rightcorner. Figure 1 outlinesthe
generalpro-cedure used for most of todays linear utter and
aeroelastic anal-yses. There are a number of proprietary and
off-the-shelf packagesavailableto perform this type of analysis,
and the choice of methodis primarily one of user preference. Thus,
linear utter analysis issubstantially viewed as a mature
science.
Linear Aeroservoelastic and Gust Response Analysis
Aeroservoelastic(ASE) and gust response analyses are also
per-formed on a relativelyregularbasis using
linearaeroelasticanalysismethods. For these applications, external
forcing terms are addedto the generalizedforce term of Eq. (1), a
term describing the gen-eralized force due to control deection and
a term describing thegeneralized force due to a gust. The equations
are typically solvedin state-spaceform andare constructedfrom
separatemodels of theaeroelastic system, the vehicle dynamics
sensors, the control actu-ators, the control system, and the gust
spectrum. The generalizedforce terms are expressedas rational
functions of Laplace variablesinthe sdomain.This is done,for
example,usingthe classicalRogersapproximation5 or the minimum-state
method of Karpel,6 which isapplied presently.
Two ASE examples are presented. The rst demonstrates
uttersuppression on an F-16-like wing, and the second investigates
gustresponse reduction for a modied F/A-18 aircraft.7 A modied
ver-sion of the Automated StructuralOptimizationSystem8 (ASTROS)is
used as an ASE analysis tool for both examples. The
method,ASTROS*,9 seamlessly interfaces with the ZAERO l inear
aerody-namic and ASE modules.
Figure 2 shows the structural, aerodynamic,and controls
modelsfor the utter suppressionanalysis of this wing. The control
systemfor this utter suppression system consists of seven
piezoelectric
a) FEM
b) Aerodynamic model
c) Control actuators
Fig. 2 Finite element, aerodynamic,and control actuatormodels of
anF-16-like wing (Ref. 7).
Fig. 3 Open- and closed-loop eigenvalues of the system at design
air-speed, Mach = 0.9 (Ref. 7): M, mode 1 (open); , mode 2 (open);
s,
mode 3 (open); O, mode 4 (open); s, others (open); N, mode 1
(closed);, mode2 (closed);, mode3 (closed);H, mode 4 (closed); and
, others(closed).
(PZT) actuators,as shown in Fig. 2. An active control
systemusingthe PZT actuators was designed to increase the open-loop
utterspeed by approximately 12%.
Bothopen- and closed-looputter analyseswere performedusingthe
ASTROS* methodology and results are summarized in Fig. 3.At the
design condition, the rst and second modes of the open-loop system
are unstable,as shown by the open square and triangleresiding in
the right-half plane in Fig. 3. Under the closed-loopcontrol, these
two modes move to the left-half plane as designatedby the solid
symbols, thus, stabilizing the system.
Figure 4 shows the modal displacement time histories for
theopen- and closed-loop systems after a perturbation of the
system.
-
7/24/2019 Computational Aeroelasticity
4/14
846 SCHUSTER, LIU, AND HUTTSELL
a) Open-loop system
b) Closed-loop system
Fig. 4 Modal time histories for the open- and closed-loop utter
sup-
pression system (Ref. 7).
The open-loopsystem is clearly divergent, whereas the
closed-loopsystem rapidly converges to a stable state.
Figure 5 shows the FEM and aerodynamic models of a mod-ied
F/A-18 aircraft10 that is used to design and analyze a gustresponse
reduction system. This model has four control
surfaces:inboard/outboard leading-edgeaps, trailing-edgeap, and
aileron.Thesecontrol surfacesare actuatedto reduce the
structuralresponseof the aircraft to an atmospheric gust.
The ASTROS* open-looputteranalysisresultsin a utterdrivenby the
wings torsion mode at an airspeed of 636 ft/s. The gustresponse
reduction active control system is tailored at the designairspeed
of 500 ft/s, which is 78% of the open-loop utter speed.Figure 6
shows the rms values of the second structural mode, thetorsion
mode, due to a gust over a range of airspeeds. For compari-son, the
rms values of both open-loop and closed-loop systems areshown. The
rms values of the closed-loop system are substantiallyreduced
throughout the airspeeds of interest.
Both of theseexamplesdemonstratethat relatively complex
ASEsystems can be analyzed using state-of-the-art linear
aeroelasticmethodologies. Advanced control systems can be analyzed
withand without aeroelastic effects to determine the sensitivity of
thedesign to aeroelasticity. Gust response of aeroelstic systems
can beassessed using these methods, and control systems to reduce
thisresponse can be readily evaluated. Flutter suppression control
sys-tems can be investigated, and any number of ASE phenomena canbe
analyzed using these techniques.
The methodology behind these analyses is among the most
re-markable of the CAE success stories.
a) FEM
b) Aerodynamic model
Fig. 5 F/A-18 FEM and aerodynamic models for gust load
alleviationanalyses (Ref. 7).
Fig. 6 Modal response rms values due to a gust vs airspeed (Ref.
7).
Transonic Wing Flutter
In the transonic speedrange, aeroelasticanalysis becomes
signif-icantly more complicated. Under theseconditions,shockwaves
canform and disappear as the aircraft undergoes unsteady,
structurallyexible motion. In addition, regions of separated ow can
appearand disappear as these shock waves strengthen and weaken.
Theseare highly nonlinear events that can have a profound impact on
theaeroelasticbehavior of ight vehicles.With utterused as an
exam-ple phenomenon,the impact of
transonicunsteadyaerodynamicsonaeroelasticstability will be
discussed.
The appearanceof shock waveson the vehicle cancausea furtherdrop
in the utter boundary in the transonic speed regime over that
-
7/24/2019 Computational Aeroelasticity
5/14
SCHUSTER, LIU, AND HUTTSELL 847
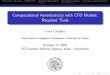
Fig. 7 Idealized utter boundary and CAE predictions.
produced by linear compressible ow effects. This drop is
termedthe transonic dip. The important feature of the transonic dip
is thebottom of the dip, which denes the minimum velocity at
whichuttercan occuracrossthe ight envelopeof the
vehicle.Therefore,predicting the bottom of this dip is often
crucialto the designof thevehicle.
Figure 7 presents an idealized utter boundary through the
tran-sonic speed regime along with illustrations of typical
computedresults using various CAE methods.The solid line depictsthe
mea-sured utter boundary, and an expected result from a utter
analysisusing linear unsteady aerodynamics is shown as the
long-dashedline. As can be seen, the linear analysis typically
predicts the ut-ter boundary adequately at subsonic and supersonic
speeds, but isunconservativein the transonicspeed regime, where it
typicallypre-dicts a higher utter dynamic pressure, and
consequently velocity,than experiment. The utter boundary predicted
by a nonlinear, in-viscidunsteadyaerodynamicsanalysisis depictedby
the dottedline.This analysis could be obtained by solving the
unsteady transonicsmall disturbance potential ow, full potential
ow, or Euler aero-dynamic equations of motion. All of these
methodologies have thecapabilityof predictingshockwavesin theow,
frequentlyresultingin a drop in the utterboundaryin
thetransonicspeed regime.How-ever, if viscouseffectsare
notincludedin the analysis,the predictedboundary can often be
overconservative,predicting a signicantlylower utter speed at the
bottom of the transonic dip. Viscous ef-fects in the form of
signicant boundary-layer thickening and/orshock-inducedow
separationtend to dene the bottom of the tran-sonic dip, and it is
only when these effects are added, as shown bythe short-dashedline,
that an accurate predictionof transonic uttercharacteristicscan be
anticipated.
The severity of the dip and its Mach number range are
highlydependent on the aerodynamic characteristics of the vehicle
to beanalyzed. Moderntransportsemploying supercritical wing
technol-ogy can experience signicant transonic effects due to large
un-steady motion of the shock wave across the wing chord. Wingswith
weaker shocks or shocks whose position is not highly sen-sitive to
changes in local angle of attack will not experience asdrastic
transonic effects. These characteristics are directly relatedto the
wing sweep, thickness, and camber distribution. Thus, theprediction
of utter characteristics in the transonic speed regimecan be
precarious because it is difcult, if not impossible, to pre-dict
when transonic effects will have a major impact on the
utterboundary.
The addition of nonlinearity and viscous effects to the
unsteadyaerodynamicsanalysisis not trivial.The nonlinearityof the
problemtypically forces the analyses to be performed in the time
domain asopposedto the frequencydomainfor linearows.
Methodsfordeter-mining the stability boundaryusing time-domain
aerodynamicsarenot as simple and require a signicant amount of
computation anduser interfacingto determine the boundary. The
additionof viscouseffects further complicates the process by adding
longer compu-tation times and more uncertainty in the form of
turbulence mod-eling. Therefore, the successes in transonic utter
prediction havebeenlimited primarilyto transonicwing utter.
Modelingand com-
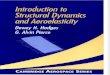
Fig. 8 AGARD 445.6 utter computations using Euler and
NavierStokes unsteady aerodynamics (Ref. 11).
putational requirements for more complete conguration
unsteadyviscousanalyses have limited the widespread development and
ap-plication of these types of methods to anything but the simplest
ofgeometries. However, the advances in the use of these methods
fortransonic aeroelastic analysis of wings are remarkable.
Two examples of this type of application that illustrate the
prob-lemswith
predictingtransonicaeroelasticityarepresentedhere.Therst is a
series of transonicwing utter computationsby Lee-Rauschand Batina11
using Euler and NavierStokes unsteady aerodynam-ics for the AGARD
445.6 wing. The CFL3DAE code12 was usedfor these computations. The
planform for this wing and a sum-mary of the utteranalysisusing
Euler andNavierStokes unsteadyaerodynamics is shown in Fig. 8. The
AGARD 445.6 wing has aquarter-chord sweep of 45 deg, and a
symmetrical airfoil with amaximum thickness of 4%. Although there
is an appreciable tran-sonic dip for this wing, as tested in air,
utter computations usingthe Euler equations were able to predictthe
bottom of the utter dipin the transonic speed regime, and addition
of viscous effects to theanalysis did not show an appreciablechange
in the results. The thinairfoil prole and high wing sweep combine
to minimize transoniceffects on this wing, resulting in this benign
utter behavior in thetransonic range. At the low supersonic Mach
numbers, however,the Euler equation analysis predicted a
signicantly higher utterboundary, and addition of viscous effects
through solution of theRANS equations improved the simulation
considerably.
Gibbons13 demonstrateda somewhat differentresultin his
analy-sisof thetransonicutter characteristicsof a businessjet wing
usingthe CAP-TSD14 and CFL3DAE aeroelastic methods.
-
7/24/2019 Computational Aeroelasticity
6/14
848 SCHUSTER, LIU, AND HUTTSELL
Fig. 9 Inviscid and viscous utter calculations on a business jet
wing(Ref. 13).
The wing planform and utterresults from this analysisare
sum-marized in Fig. 9. In contrast to the AGARD 445.6 wing, this
winghas a quarter-chords weep of approximately 27 deg, and the
airfoilthickness varies from 13% at the wing root to 8.5% at the
wingtip. The utter boundary shown in Fig. 9 is plotted as utter
speedindex vs Mach number. Results from two inviscid analyses and
aviscous analysis are compared with wind-tunnel data. For both
in-viscid cases, the calculated utter boundary drops off rapidly
asMach number increases into the transonic regime. The faired
linein Fig. 9 represents the CFL3D Euler computations. At Mach
0.90,the Euler computationscontainedenough aerodynamicdamping
toidentify the utter boundaryshown by the squaresymbol.However,at
this Mach number, the inviscid CAP-TSD result indicated a
freeresponse with no appreciable aerodynamic damping even for
verylow dynamicpressures.Euler calculationswere performedat
Mach0.92 and 0.94 and showed a similar free-response
characteristic.Thus, the inviscid transonic methodologies employed
on this wingpredicta utter boundarythat dips to very low,
unrealisticvelocitiesat transonicspeeds.The additionof the viscous
terms in the CFL3Dcomputations,with appropriate changesto the wing
grid, raises thepredicted Mach 0.92 and 0.94 utter boundaries to
the level indi-cated by the triangle symbols in Fig. 9. These
viscous results are inmuch improved agreement with the behavior
observed in the windtunnel. Similar improved agreement has been
obtained with a vis-cous version of the CAP-TSD transonicsmall
disturbancepotentialow code.15
Although there are data that indicate that nonlinear
inviscidanal-ysis methods may be capable of predicting the
transonic dip inisolated utter cases, it would certainly seem
prudent to include
viscous effects in all transonic utter analyses. It appears
thatnonlinear inviscid methods produce results that are
conservativein the transonic speed regime, but this has not been
denitivelyproven. Flutter margin is often a critical parameter in
aircraftdesign, and overly conservative utter margins can often
resultin unnecessary added structural weight and/or reduced
vehicleperformance.
The results discussed here are enlightening from a research
andphenomenological understanding standpoint and certainly
demon-
stratethe high-qualityresults that can be obtained when using
high-order viscous unsteady aerodynamics. However, these
applicationsare for wing-alone geometriesand have limited value in
vehicle de-sign application, where the interactiono f complex
geometric com-ponentscan have a rst-order effect on the
aeroelasticperformanceof the vehicle. Thus, although these
applications are viewed as asuccess, they also highlight one of the
chief roadblocks to applica-tion of higher-order unsteady
aerodynamics methods to aeroelasticproblems. The human and
computational resources required to ap-ply these methods to
problems of highercomplexitythan individualvehicle components
precludes them from being used more exten-sively in general
aeroelasticanalysis.
Progress in CAE
The discussedsuccesses of CAE have led to a number of
isolatedinvestigations and applications that tend to use the
available CAEtechnology in innovative or novel ways, but have not
yet receivedthe attention to elevate the capability to mainstream
application orresearch. This section highlightsa few of these areas
and discussestheir role in current and future CAE development.
In general, the applications discussed here tend to stretch
theavailable technology beyond the current accepted limits of
appli-cation. In doing so, they highlight the shortcomings of the
currenttechnology and provide direction for future, more
generalized de-velopment. In short, they represent the breeding
ground for futureCAE research and development.
Nonlinear ASE Analysis
CAE methods have been applied to a number of problems in-volving
aeroservo and ASE analyses. CAE methods involving lin-ear
aerodynamics can be applied to some problems in this area aslong as
the control surface deections are small and the geomet-rical
discontinuities generated by activation of the control systemdo not
generate aerodynamic nonlinearities in and of
themselves.Unfortunately for most realistic control surface
deections, this isnot the case, and separated ows in the vicinity
of hinge lines andnear control surface edges quickly degrade the
accuracy of linearaerodynamicanalyses.To combat these
problems,researchershaveapplied various levels of nonlinear
unsteady aerodynamic analysismethods to the prediction of unsteady
airloads due to control sur-face deection. Two notable examples of
this type of analysis arepresented here.
B-2 Residual Pitch Oscillation
During ight testing of the B-2 bomber, a nonlinear
aeroelasticresidual pitch oscillation(RPO) was encountered after
control sur-face pitch doublets were input at conditions outside
the aircraftsight envelope.16 The initial vehicle response to the
control sur-face doublet decayed in amplitude to a small
limit-cycle RPO afterseveral pitch cycles. Video from a chase plane
showed a movingshock in the condensation cloud on the upper surface
of the air-craft. Further analysis of the data suggested that the
RPO was aresult of the interaction of the aircraft short period and
rst exiblebending mode of the aircraft with the oscillating shock.
To betterunderstand this RPO, an analysis effort was undertaken in
whicha viscous/inviscid interaction version of the CAP-TSD CAE
code,CAP-TSDV,15 was modied to include the short period dynamicsand
the active ight control system of the aircraft.Time simulationsof
two conditionsresultingin RPO wereanalyzedusingCAP-TSDVwith mixed
results.
Figure 10 shows the B-2 planform, with the CAP-TSDV
modelsuperimposed on it. The dashed line in Fig. 10 shows the
actual
-
7/24/2019 Computational Aeroelasticity
7/14
SCHUSTER, LIU, AND HUTTSELL 849
Fig. 10 CAP-TSDV model and actual B-2 planform and control
surfaces (Ref. 16).
planform and control surfaces, whereas the solid line shows
theCAP-TSDV representation of these components. There are a num-ber
of restrictions to the modeling capability in CAP-TSDV
thatprecluded modeling the actual vehicle planform and control
sur-faces. Thus, the control surface hinge lines and edges, as well
asthe aircraft wing tip geometry, can only be approximated by
theCAP-TSDV methodology.In this analysis,only the control
surfacesactively moving during the observed RPO response were
modeled,allowing the middle elevon and the outboard split drag
rudders tobe omitted from the model.
The rst ve elastic modes, as well as the rigid-body pitch
andplunge modes, were modeled in the CAP-TSDV analysis. A sim-plied
pitch control augmentationight control system (FCS) wasalso
included in the CAP-TSDV model to actively deect the con-trol
surfaces during the simulation. This allowed both open-
andclosed-loopsimulations to be performed and the impact of the
con-trolsystem on theRPO behaviorto be
assessed.Verticalaccelerationand pitch rate responsescomputed by
CAP-TSDV at the ightvehi-clesensor locationswere used as
feedbacksensorinputsfor theFCSmodel. In addition, some of the
nonlinear actuator characteristicsofthe ight vehicle were also
modeled in the CAP-TSDV analysis.
CAP-TSDV time simulations were initiated using a
converged,steady-state, trimmed analysis of the aircraft at a
specied ightcondition. The inboardelevon was deected using a
control surfacedoublet command to perturb the vehicle, and the
resulting pitchresponse was computed by CAP-TSDV.
Both open- and closed-loopsimulations were performed, and
re-sults for the closed-loop, heavy weight, forward c.g.
congurationare shown in Fig. 11. The closed-loop results closely
match theight-testresults at these conditions.The sharp break in
the closed-loop damping characteristics has been assessed to be due
to theformation of shock waves on the vehicle. The predicted
frequencycharacteristicsof the RPO, which are not shown here, also
correlatewith the ight-test data at these conditions.
A second, lighter weight conguration that exhibited the
RPOphenomenon was also analyzed. CAP-TSDV did not predict
thephenomenon as accurately as for the heavy-weight case. It
over-predicted the severity of the RPO as compared to ight test
andalso did not capture the fact that the RPO tended to stabilize
asthe Mach number was further increased. Several reasons for
thispoorer performance have been postulated, including
CAP-TSDVsability to predict accuratelythe streamwise and spanwise
separatedow regions at these conditions,but further research is
required toformulate hard conclusions.
Fig. 11 Computed and ight test B-2 RPO damping
characteristics(Ref. 16).
RANS Anal ysis of Oscillating Flap and Sp oiler Congurat
ions
The CAP-TSDV a nalyses of the B-2 have demonstrated the util-ity
of viscous/inviscid interaction methods in computing fully cou-pled
ASE problems of relativelyseverecomplexity. However, thesemethods
have known limitations, particularly when attempting tosimulate
moderately to severely separated and three-dimensionalseparated
ows. The next step up in ow physics delity is to solvethe RANS
equations, and ow around deected control surfaces isa prime
candidate for applicationo f this technology.
A number of studies have been performed modeling
deectedcontrolsurfaceswith higher-orderaerodynamicmethods.1723
Ref-erences 1720 represent a signicant body of work
investigatingmodeling and solution techniquesfor
trailing-edgecontrolsurfaces.In these studies, particular attention
has been paid to the accuratemodeling of the discontinuities at the
spanwise edges of controlsurfaces. The ENSAERO Euler/NavierStokes
CAE method24 wasused for these studies, which were conned primarily
to low aspectratio, high sweep, thin wings, and wingbody
congurations. Thecorrelation with experimental data for these cases
is, in general,very good, but transonic effects for these types of
geometries aretypically small compared to lower sweep wings with
thicker wingsections.
Schuster et al.,21 Bartels and Schuster,22 and Schuster
andBartels23 performed computations on the NASA Langley
ResearchCenter benchmark active controls technology (BACT) wing
com-paring two different RANS methods, CFL3D version 5.0 (Ref.
25)and ENS3DAE.26 The BACT wing has a rectangular planform anda 12%
thick symmetrical airfoil section. The planform and con-trol
surfaces for the wing are shown in Fig. 12. The two methodswere
compared with each other and against experimentally mea-sured
unsteady pressures along the midchord of the aileron. Theanalyses
were performed at Mach 0.77 with the aileron oscillat-ing
sinusoidally at 5 Hz. Figure 12b shows the real and
imaginarypressure coefcient plotted vs percent chord along the wing
sec-tion. The computations were performed on identical grids with
theonly differences in the calculations being in the formulation of
theequations and the turbulence modeling. The ENS3DAE calcula-tions
were performed using a central nite difference method andthe
BaldwinLomax turbulence model, whereas the CFL3D calcu-lations were
performed using an upwind nite volume method andthe SpalartAllmaras
turbulence model. For the most part, the twomethods give similar
results with differences in the peaks at theaileron hinge line and
in the imaginary component of the pressurecoefcient. The imaginary
component of the pressure is very smallcompared to the real
component for this case, and differences in
theimaginarycomponentplot are overexaggeratedbecause the
verticalaxis scale factor is ve times that used for the real
component plot.
CFL3D calculations of the wing with an oscillatingspoiler
havealso been performed by Schuster et al.27 The results of these
cal-culations at Mach 0.77 with a mean spoiler deection of 5 deg
anda spoiler oscillation of 4.5 deg at 9.56 Hz are shown in Fig.
13.
-
7/24/2019 Computational Aeroelasticity
8/14
850 SCHUSTER, LIU, AND HUTTSELL
a) BACT planform
b) Unsteady pressure distributions
Fig. 12 BACT wingplanformand unsteadypressure distributions
due
to aileron oscillation,M= 0.77, = 0.0 deg, ail= 0.0 deg, ail=
2.0 deg,andfail= 5 Hz (Ref. 22).
The computation of an oscillating spoiler geometry and
quantita-tive comparison with experimental data is believed to be
unique
and representsthe type of analysis that can be
accuratelyperformedusing innovative modeling techniques.
Limit-Cycle Oscillation Using Viscous/InviscidInteraction
Aerodynamics
Considerable progresshas beendemonstratedin the use of
lower-order viscous/inviscidinteractionmethods to model
separationonsetand mildly separated ows, particularlythose cases
leadingto limitcycle oscillation (LCO).
The LCO phenomenon can be triggeredby several
mechanisms.Nonlinearitiesin the aerodynamics,structures,or
thevehiclecontrolsystem can result in the quenching of an
instability, or in the caseof the B-2, in prevention of a
convergent system from reaching astaticsteadystate.
Aerodynamicnonlinearitiesare difcultto modeland predictdue to the
complex ow interactionsinvolved.Also, thenonlinearities producing
the LCO often involve a transitionin owstate, such as the
appearance and disappearance of shock waves,vortices, and separated
ow regions.
Coupling of transonic small disturbance (TSD) potential
owmethods, such as CAP-TSD, with interactive boundary-layer
Fig. 13 Real componentof unsteadyp ressure for the BACT wing
with
an oscillating upper surface spoiler,M= 0.77, = 0.0 deg, s = 5.0
deg,s = 4.5 deg, and f= 9.56 Hz (Ref. 27): , CFL3D; ,
experiment(upper surface); and , experiment (lower surface).
a) Amplitude decaying to LCO
b) Amplitude growing to LCOFig. 14 Computed business jet wing
tip deection timehistories show-ing LCO,M= 0.89 (Ref. 28).
schemes has proven to be effective in the prediction of LCO
phe-nomena triggered by separation onset and
shock-inducedseparatedow. The B-2 RPO example discussed earlier is
a prime exampleof the use of this type of methodology to predict
complex LCOproblems.
Edwards28 has presented a second example for a business jetwing
operating at transonic conditions. This case is interesting
be-cause it is purely an aerodynamics/structural LCO triggered
onlyby nonlinear aerodynamics. The mechanism involved in this LCOis
one of shock-induced separation at conditions below the tran-sonic
utter boundary. The LCO involves the excitation of the rstbending
mode of the wing. Figure 14 summarizes the result of aCAP-TSDV an
alysis of the business jet wing at Mach 0.89 and dy-namic pressure
of 79 psf. In Fig. 14, the vertical deection of thewing tip is
plotted as a function of time for two different
initialdisplacements of the wing tip. Figure 14a shows that, if the
wingtip is displaced to a large deection, the motion will decay to
theexperimental limit-cycle amplitude. Likewise, if the tip is
initiallydisplaced to a small deection, the amplitude will grow
until itreaches the LCO amplitude. This behavior is an important
charac-teristic of the LCO phenomenon.The CAP-TSDV
analysiscapturesa transient shock-inducedseparationon the outboard
portion of thewing that is responsiblef or the LCO behavior.
Further experimentson this wing29 have veried this mechanism and
identied a secondtransonic LCO phenomenon that involves the wings
rst torsionmode.
The two LCO examples presented have demonstrated the utilityof
viscous/inviscid interaction methods for these types of
predic-tions. However, the current methodology requires renement
andimprovement in a number of areas.
-
7/24/2019 Computational Aeroelasticity
9/14
SCHUSTER, LIU, AND HUTTSELL 851
At present, the boundary-layerformulationsincludedin the
anal-yses are a simple stripimplementationof the
two-dimensionalcom-pressibleintegralboundary-layerequations.The
implementationofthe viscous equations is also only quasi steady.
Three-dimensionaleffects can be very important if not dominant on
many modern con-gurations,and the two-dimensionalimplementationof
the viscousmodeling is certainly restrictive. The impact of the
quasi-steadyimplementation of the equations has yet to be fully
quantied.
On the inviscid side of the methodology, the TSD potential
ow
formulationof the equations limits the applicationof the method
toows with weak shocks and those without vortices.
Higher-orderinviscid formulations, such as the Euler equations,
would relievesome of these restrictions.
The coupling of the methodologies, although well posed forsteady
ows, remains somewhat in question for unsteady ows.Addition of the
viscous simulation using present techniques canhave a destabilizing
effect, and many times viscous computationscannotbe performed,due
to stabilityissues, in regionswhere similarinviscid computationscan
be performed.
Each of the preceding topic areas is ripe for further
investigationby the research community.
Reduced-Order Modeling for Aeroelastic Applications
Finally, one cannot ignore the recent advances and
contributionsof reduced-order modeling (ROM) for aeroelastic and
ASE appli-cations. ROM proposesto dene methodologyby which
physicallycomplex dynamic phenomena can be characterized and
modeledat a reduced computational cost. In addition, important
physicalcharacteristics of the system can be extracted that often
cannot beidentied using traditional simulation techniques. The
methodol-ogy formulates strategies for identication of linear and
nonlinearkernels for a given aeroelastic system. These kernels are
generatedusing a xed number of numerical time simulations of the
systemresponse due to a generic input, such as a pulse. These
kernels canthen be superimposed, through convolution, to model the
systemresponse to an arbitrary input. This type of
methodologyespeciallybenets applicationssuchas
nonlinearcontrolsystemdesign,wherethe burden of many nonlineartime
simulationsof the complete sys-tem for each control input can be
reduced to just a few simulationsof the complete systemfor a
generic input followed by many simu-lations using the ROM.
Beran and Silva30 and Dowell and Hall31 provide
excellentoverviews of the ROM techniques under development today. A
re-cent application by Silva and Bartels32 has demonstrated the use
ofRANS simulationmethodologyto model the transonic utter of
theAGARD 445.6 wing. Hong et al.33 have also used this ROM
tech-nique to simulate the unsteady aeroelastic characteristics of
morecomplex and realistic congurations. In Refs. 32 and 33, the
effortrequired to perform a transonic utter analysis of the wing
usingtime simulation techniques is compared with the use of
ROM.
The techniqueutilizedin Ref. 32 requiresthat an
aeroelastictran-sientduetopulseinputsineachstructuralmodebecomputedtobuildthe
ROM. In general, each of these pulse responsecomputationsareless
expensive than an aeroelastic transient because the pulse
re-sponses tend to return to a steady state in fewer cycles of
motionthan what is required to extract frequency and damping
informationfroma typical aeroelastictransient.Once thepulse
responsefor eachmode has been computed,the
fullycoupledaeroelasticresponsecanbe computed for any dynamic
pressure by superimposing the im-pulse response characteristics
through convolution. The transientscomputed using the ROM are
relatively inexpensive to compute.
For highly complex problems where a large number of
structuralmodes are required, the computational cost of generating
modalROM responses will increase and may surpass the cost of
standardsimulations. However, a primary reason for generating
aeroelasticROM models is to develop insight into the nature of the
compu-tational responses as contrasted with traditional linear
aeroelasticanalyses. As shown in Ref. 32, the comparisonbetween
CFD-basedaeroelasticanalyses and linear
frequency-domainaeroelasticanaly-ses can be easily performedusing
the CFD-based aeroelasticROMs.In addition, methods are being
developed that will enable the gen-
eration of modal-based ROMs using a single input, as opposed
toan input per mode.
Thomas et al.34;35 present a method whereby the order
reductionmore directly attacks the uid solution, thus, relieving
the depen-dence of the ROM on the specic modal motions of the body.
Theirmethod, known as the harmonic balance technique,allows
reduced-ordermodelsof theuidproblemto be developedby a
superpositionof a seriesof harmonics.These reduced-orderuid
modelscan thenbe coupled to structural dynamics and control
simulations to per-
form aeroelastic and aeroservoelastic analyses efciently. In
thiscase, the issue becomes how many harmonics to retain to obtain
asufciently accurate aerodynamic analysis of the problem.
Further research and application of ROM techniques will
relievemany of the issues discussed in this section, and this
methodologycertainly holds signicant promise for future aeroelastic
analysis.
Challenges to CAE
The preceding sections have discussed the areas where CAE
hasbeen used to model problems of interest to both the aircraft
devel-opment and design community as well as for aeroelastic
researchapplications.However, thereare a number of areaswhere CAE
tech-niquesfallwell shortof known analysisrequirements.Some of
theseareas will be discussed here as the challenge to CAE.
Robust, Automated Linear Flutter Analysis for Design
As an analysis tool, linear utter methods havecertainlymaturedto
the state where they are widely applied in the aerospace indus-try
on a day-to-day basis. Whereas great strides have been madein
coupling these methodologies with mainline structural analysistools
used in the design environment, linear utter analysis still
re-quires a signicant amount of user interaction to perform a
givensimulation. This lack of automation of the analysis itself has
pre-cludedits integrationinto the designoptimization environment
andit continues to be exercised as a post-design analysis tool.
Part of this problem is due to the complexity of the utter
anal-ysis itself, but a stagnation of algorithm development focused
onautomating the process is probably also to blame. Output from
atypicalp kutter analysis for a transport wing is shown in Fig.
15.In contrast to the wing utter analyses shown earlier, which
con-sistedof 10 structuralmodes or less, this analysis contains 34
struc-tural modes, plus 6 rigid-body degrees of freedom. Figure 15
plotsmodal damping vs airspeed with negative values of damping
indi-cating aeroelasticallystable motions and positive values
indicatingunstable motion. The critical point is when a given mode
crossesthe zero-dampingaxis,which denes the utter boundary.Figure
15is very complicated with several modes crossing the
zero-dampingaxis.
To incorporate utter effectively in the design optimization
pro-cess, the data of an analysis similar to that shown in Fig. 15
mustbe interrogated at each design condition to determine if a
utterconstrainthas been compromised. Simply tracking the modes in
thepreceding data is a formidable task, and although we have tools
forthis purpose,they are not infallible.Forcomplicatedsystemsas
this,
Fig. 15 Typical utter analysis results for a transport
aircraft.
-
7/24/2019 Computational Aeroelasticity
10/14
852 SCHUSTER, LIU, AND HUTTSELL
it is easy to lose track of modes and inaccuratelypredict the
criticalutter crossing.
It also is common for the utter mechanism to change as
thestructuralproperties and evenight conditionschange.
Vehiclesof-ten have multiple utter modes simultaneously active for
any givenight condition. The most critical mode is the one that
occurs atthe lowest airspeed becausethe vehicle will encounterit
rst. How-ever relatively small changes in the vehicle structural
propertiesand/or ight conditions can cause utter modes to shift
dramati-
cally, making formerly benign utter modes critical. This can
bevery confusing to an automated design process because vastly
dif-ferentstructuralpropertiesmay be importantto the
individualuttermodes.
Further complicating the issue is that some utter crossings
arevery shallow, as shown by the mode labeled E in Fig. 15.
Theseshallow crossings can be physical utter modes as is the case
in so-called hump uttermodes, or they can be an artice of
thestructuralmodeling. One common cause for these types of
crossings is thepresence of in-plane modes. For a lifting surface
such as a wing,this would be a mode with deection that is primarily
in the planeof the wing, as opposed to one with deection normal to
the wingplane. Linear utter analyses cannot accurately account for
thesetypes of motions,and the simulationcan predict
nonphysicalutter
mechanisms. When this occurs, these in-plane modes are
usuallyexcluded from the utter analysis to avoid the
confusioncaused bytheir presence. Aeroelasticiansa lso often
perform modal reductionto exclude modes that are not important to
the utter analysis and,thus, provide a clearer picture of the utter
characteristics of thevehicle. These types of operations are
difcult to automate for usein a design environment.
Finally, the simple mathematics of the linear utter problem
cangenerate spurious roots to the equations that can ag
false-positiveresults. These spurious roots are due to poor
conditioning of thematrices as the problems become more complex and
more modesare retained in the utter analysis. Edwards and
Wieseman36 dis-cuss many of these issues when describing the
development of theGeneralized Aeroelastic Analysis Method (GAAM).
Automatically
detecting and eliminating these roots from consideration is a
mustfor incorporationof linear utter methods in the automated
designprocess.
In short, linear utter an alyses require a higher level of
automa-tion and further improvements in robust operation before
they canbe realistically incorporatedin an MDO environment. The
compu-tational requirements of these methods are well suited to
todayscomputer resources, and efciency is not a major issue
prevent-ing this assimilation. At present, the entire utter
analysis processrequires too much user intervention and control to
be effectivelyincorporatedin the design environment.
Efcient Nonlinear Unsteady Aerodynamic Analysis
A signicant deterrent to the widespread use of high-level
CFDmethods in aeroelastic and ASE analysis is the computational
ef-ciency of the methods. Signicant effort has been devoted to
thedevelopment and application of steady CFD, and this attention
tothe efciency issues haspaid off with the routine useof steady
CFD,throughoutthe industry,as a
mainstreamaerodynamicanalysistech-nique. Unfortunately, unsteady
aerodynamicanalysis has tended tobe neglected during this
development period, and we are only nowbeginning to seriouslyassess
the ability of many of the steady CFDcodes to handle unsteady
problems effectively.
In retrospect, some of the techniques used to improve the
ef-ciencyof steadyCFD methods may not be amenable to the analysisof
unsteady ows. For instance, it has long been known that
thelow-frequency transients in a CFD simulation are a primary
con-tributor to slow convergence rates. Signicant efforts have
beenfocused on rapidly eliminating these low-frequency transients
toimprove convergence to a steady state. However, many
aeroelasticand ASE problems involve relatively low-frequency
phenomenon,and the techniques used to develop some of todays
fastest steadyCFD codesmay make them inappropriatefor unsteady
analyses dueto their low-frequency damping characteristics.
A second example illustratingthis point is the widespread use
ofdomain decompositionto perform parallel computationsfor steadyCFD
analyses. When the computational grid is broken into
manysubdomains, or blocks, CFD computations about complex
cong-urations involving millions of grid points can be effectively
spreadacross many computer processors. However, extending this
tech-nique to unsteady ows results in the introduction of time lags
inthe unsteady analysis alongeach of the arbitrary subdomain
bound-aries.These lags forcethe userto usesubiterationsas the
problem is
brokeninto smaller blocksand spreadacross more
processors.Thishas a profound impact on efciency because the
addition of just asingle subiteration at best doubles the computer
time required tosolve the problem. Solution of the unsteady ow
problem becomesdependent on the number of subdomains and the manner
in whichthe global domain is subdivided.
New parallel processing algorithms for unsteady ows must
beinvestigatedto remove the dependence of the problem on the
num-ber of processors used to solve the equations. In other words,
thesolutions obtained for any given unsteady ow analysis should
beidentical for any number of processors used to solve the
equations.This requires that implicit boundaryconditionsbe
employedat sub-domainboundarieswhen using domain decomposition,or
new par-allelstrategies that operate at the numericalalgorithm
level must be
developed.Another limiting factor is the size of time step that
can be taken
by a given CFD code to perform an unsteady computation.
Manytechniques, including implicit formulations, are limited to
smalltime steps to maintain stability. One method that has become
pop-ular among CFD developers is the incorporation of subiteration
tohelp converge the nonlinear aerodynamic solution between
timesteps. Pulliam37 recommends this approach to improve the
accu-racy of diagonal implicit methods, and Jameson,38 Melson et
al.,39
and Rumsey et al.40 describe methods incorporating a dual
time-stepping technique and multigrid for both accuracy and
efciencyimprovement of traditionalfactored schemes.
One must be careful, however, when assessing these methods
forefciency because each subiteration within a time step is as
costly
or more costly thana single time step by
conventionaltime-steppingalgorithms. This issue is highlighted by
Bartels and Schuster22 us-ing the earlier discussed
oscillatingaileron case as an example. Theresults of their
experience are shown in Table 1, which shows thatthe CFL3D
aeroelastic method using subiterationcould take a timestep over 25
times larger than the ENS3DAE method without subit-eration.
However, the CFL3D calculation required 6 subiterationsper time
step, and the net gain in computational work was reducedto a factor
of 4.3 over the ENS3DAE solution. Comparing this netgain in
efciency to the potentialloss in accuracyfor takinga signif-icantly
larger time step, one can quickly see that there is a
complextradeoffbetweenaccuracyandefciencythatmustbeweighedwhenemploying
subiteration.
Currently, unsteadycomputationscanbe an orderof magnitudeor
more costly than a steady ow analysis. This cost has
constrainedmost unsteady ow applications, beyond simple research
demon-strations,to be performedusing structuredgrid
formulations,whichare inherentlymore computationallyefcientthan
unstructuredgridmethods. This restriction has a direct impact on
the amount of hu-man resources required to simulate a given
problem, particularlyfor complex congurations,and ultimatelylimits
the acceptanceofthe methodology by potential users outside the CFD
community.Both of these issues are discussed in subsequent
sections. In short,
Table 1 Impact of subiteration on efciency of BACToscillating
aileron calculation.22
BACT oscillatingaileron analysis ENS3DAE CFL3D
Time steps per cycle 3300 128Subiterations 1 6Computational work
per cycle 3300 768CPU time per cycle, (Min) 175 35
-
7/24/2019 Computational Aeroelasticity
11/14
SCHUSTER, LIU, AND HUTTSELL 853
there is signicant margin for further development of efcient
andaccurate methods for the computation of unsteady nonlinear
ows.As steady method developmentcontinuesto mature, it is hoped
thatthe resourcesand effort devoted to steady methods will be
directedtoward the developmentof new unsteadyalgorithms and
strategies.
Robust Moving Grid Methodology
A key issue that separates the application of Euler and
RANSaeroelasticmethodsfrom linearand even TSD potentialow
aeroe-lastic schemes is the requirement of the former methods to
physi-cally move and deform the model and its surrounding grid.
Linearmethods eliminate the physical deformationof the vehicle from
theproblemby assuming small perturbation boundary
conditions.TSDunsteady aerodynamics methods make a similar
assumption. How-ever, most Euler and RANS formulations employ the
full surfaceboundarycondition in their formulation, and the
physical motion ofthe boundaries, as well as the grid
surroundingthe vehicle, is cap-tured directly in the equations of
motion. This is the most accurateapproach to simulating the
unsteady aerodynamics of the vehicle,but it introduces a major
complication to the analysis. Efcientlymoving what can amount to
millions of grid points thousands oftimes during an aeroelastic
calculation is a daunting task in and ofitself. The fact that the
grids must also be moved in such a fashionas to not degrade grid
quality or introducecrossed grids or negativecell volumes adds
further complication.
A signicant body of research has been performed in the areaof
grid motion schemes for aeroelastic analysis. These range
fromsimple algebraic shearing methods to those that model the
vehicleand the surrounding grid as a physical eld equation that can
becoupled with the analysis. Schuster et al.26 introduce a simple
one-dimensional algebraic shearing technique that is very efcient
andis suitable for structured grid topologies. This method is
effectivefor many geometries of interest, particularly planar
lifting surfaceand some controlsurface deection21
applications.However, as ge-ometric and/or grid topology complexity
increases, these simplemethods begin to break down. Several
researchers have extendedthe algebraic grid deformation approach to
the use of transniteinterpolation (TFI) of the structural
deformations,4143 which en-able applicationto more complex block,
structuredgrid topologies.Batina44;45 introduceda deformingmesh
algorithmbasedon a springanalogy that was originally developed for
triangular and tetrahedralunstructuredgrid applicationsand was
later extended to hexahedralcells for structured grid applications
by Robinson et al.46 Both theTFI approach and the basic spring
analogy suffer from the similarcharacterthat grid skew can be
exaggeratedas the gridis deformed,and in extreme cases, grid
crossing can occur. To combat this prob-lem, Farhat et al.47
recommend the use of vertex-placed torsionalsprings to control the
angle between grid element edges. Bartels48
further addresses these issues by imposing more strict
orthogo-nality rules on the grid deformation in the vicinity of the
vehiclesurface.
Each of the described methods requires some knowledge of thegrid
topologyand/or connectivitybetween grid points. Recent
griddeformation research appears to be moving toward the removal
ofthis restriction.Chen and Hill49 describea techniquethat
modelsthevolume surrounding the vehicle with an elastic homogenous
solid.In this case, each grid point surrounding the vehicle is
associatedwith a specic locationin the solid,while the vehicle
surface lies onthe boundary of the solid. As the vehicle deforms,
the elastic equa-tions of motion are solved using a boundary
element method. Eachpoint in the grid moves accordingto the elastic
deformation of thesolid; therefore, no informationconcerningthe
structure,topology,or connectivity of the grid is required to dene
the grid deforma-tion. Melville50 describes a similar procedure
that uses a distancerelationshipbetween the individualgrid points
and the vehicle sur-face to determine the grid deformation, again
without knowledgeof the grid topology or grid point connectivity.
He has used thistechnique to perform an aeroelastic simulation of a
complete F-16conguration. The grid system and one of the structural
modes as-sociated with the analysisare shown in Fig. 16. As can be
seen, thegeometry, the associatedstructured,multiblock grid, and
the struc-
a) Complex multiblock grid system
b) Complex structural deformation
Fig. 16 Grid and structural deformation associated with the
aeroelas-tic analysis of an F-16 aircraft (Ref. 50).
tural deformation for this analysis are all very complex. The
factthat an aeroelastic simulation can be performed on a model of
thiscomplexity is a testament to the grid motion scheme employed
inthe analysis.
Although signicant progress has been realized in the
develop-ment of grid deformation schemes, no single technique has
beenidentied as having signicant benets over the others. It
appears
the preprocessing approaches to the problem are gaining favor
be-causetheyallow theuserto assessthesuitabilityofthe
grid,aheadoftime,for worst-casedeformations.However, thereis still
signicantopportunity to make advances in this area of research.
Complex Conguration Aeroelasticity
Many linear and nonlinear aeroelastic phenomena are the re-sult
of subtle structural and aerodynamic interactions between air-craft
components. Engine/nacelle/pylon, wing s tore/pylon,
strakes,chines, vortex generators, and fences are among the long
listof components that can have a dramatic impact on both thesteady
and unsteady character of the vehicle aerodynamics andstructural
dynamics. It is often imperative to model these de-tails accurately
and efciently when performing some aeroelasticanalyses.
The importance of geometric details to the aerodynamic
andaeroelastic performance of air vehicles is shown in Fig. 17.
Shetaand Huttsell51 have numerically investigated the buffeting of
theF/A-18 vertical tails due to the leading-edge extension
(LEX)vortices. The effects of adding LEX fences to the aircraft
are
-
7/24/2019 Computational Aeroelasticity
12/14
854 SCHUSTER, LIU, AND HUTTSELL
a) LEX fences off
b) LEX fences on
Fig. 17 Effect of LEX fences on the vortex ow patterns on an
F/A-18aircraft.
clearly observed in Fig. 17. In this 35-deg angle-of-attack
calcu-lation, the LEX vortex pattern is signicantly altered through
ad-dition of the fences. This pattern has a direct impact on the
dy-namic loads experienced on the vertical tails of this aircraft.
Thus,this relatively small geometric detail has a major impact on
theaeroelastic performance of the F/A-18 and other
twin-vertical-tailghters.
A second example is the LCO experienced on the F-16.52
Thisnonlinear aeroelastic phenomenon manifests itself only for
certainunderwing store congurations and ight conditions. It was
notdiscovered before ight testing of the aircraft. To date, this
phe-nomenon continues to be the subject of signicant debate
through-out the aeroelastic community, and potential causes ranging
fromcomplex, unsteady transonic ow interactions to structural
nonlin-earities have been offered as the root cause for the LCO.
Unfor-tunately we do not possess high-order aeroelastic tools
capable ofaccurately simulating the unsteady transonic ow about the
highlycomplex store geometries of the F-16 to help answer some of
thesequestions.
As these types of detailsare added to thesimulation,the
issuesofthe preceding two sections become enabling to the
aeroelasticanal-ysis, particularly for high-order methods. However,
just the model-ing requirementsassociated with these conguration
details can besignicant even for steady ow problems. For this
reason, the useof unstructured grids has become popular for many
steady compu-tational aerodynamicssimulations on complex
congurations. Thecomputationalresourcesrequiredto
performunstructuredgrid com-putations are generally higher than
those required for structuredgrid, but the time and human resources
required to model complexcongurations using unstructured grids is
much smaller than forstructured grids.
Unfortunately, the extension of unstructured grid technology
tounsteady ows has not been thoroughly investigated, and
furtherresearch in this area is required. Batina53 and Rausch and
Batina54
haveappliedan unstructuredgrid Euler analysismethod to
aeroelas-ticproblemson complex congurations,and this work is most
notedfor the developmentof the spring analogyfor grid
deformationandtheirinvestigationsintoadaptivegrid techniquesfor
unsteadyows.Farhat et al.55 use a similar method to perform
aeroelastic analysison an F-16 conguration.Viscous computations
using unstructuredgrids are becoming more commonplacefor steady
ows, but unfor-tunately their extension to unsteady ows and
aeroelastic problemshas not yet been realized.
Nonexpert User Environment
Perhaps the most daunting challenge faced by developers of
fu-ture aeroelastic analysis and design methods is the formulation
oftools that can be employed by engineerswho are not experts in
theindividual disciplines that form the methods. Aeroelasticity has
asignicant impact on the performance of modern air vehicles,
andincorporatingaeroelasticconsiderationsearly in the design
processcan help developers avoid design surprises in the latter
stages ofthe aircraft development, where xes to the problem can be
verycostly both nancially and to vehicle performance. If these
meth-ods are integrated into the preliminary design process,
engineersthat are experts in elds other than CFD, nite element
struc-tural modeling, ight controls,or even aeroelasticitywill use
them.
This will require that the methods be signicantly more robust
andautomated than current methods, particularly for the
higher-orderformulations.
The developers of higher-order methods must aggressively
ad-dress this situation if these tools are to be used in a fashion
evensimilar to present linear methods. Aeroelastic analysis of ight
ve-hicles is not optional, and organizations will take the path of
leastresistanceto meet their aeroelasticanalysisneeds. At present,
high-order aeroelastic methods require a signicant investment in
time,human, and computer resources. Until these investments are
re-duced, high-order aeroelastic methods will continue to be
viewedas optional, and their application will be intermittent at
best. Eventhough the cost of aeroelasticwind-tunnel and ight
testing is veryhigh, maintaining a specialized staff simply to
employ high-order
aeroelastic methods is h igher. Aircraft manufactures will
continueto maintainthe statusquo in regardto
aeroelasticanalysisuntilthesemethods become more cost
effective.
Conclusions
CAE continuesto play a critical role in the developmentof
mod-ern air vehicles. The current suite of linear aeroelastic, ASE,
andgust response methodologies serves as the mainstay for
aeroelas-tic analysis and they form a solid base on which to build
futuredevelopments. Unfortunately, modern aircraft systems
continuallyuncover aeroelastic issues that cannot be effectively
predicted bythese methods, and as a result, costly aeroelastic
wind-tunnel andight tests must be conducted to investigateand
rectify these prob-lems. This situation is envisioned to worsen as
new concepts, suchas morphing, continuous moldline controls, etc.,
call for vehicleswith higher degrees of structural exibility.
Many of todays analysesinvestigateonly the
aeroelasticstabilityof the vehicle,where small
aeroelasticperturbationscan be assumedand the impact of wing
thickness and camber and even static aeroe-lastic deformationcanbe
neglected.These characteristicswill notbenegligibleon many future
vehicles,and heretofore accepted and/orcalibrated errors from
linear aeroelastic analysis will no longer beacceptable.
Therefore, it is imperative that higher-orderaeroelastic
methodscontinue to be developed and rened. Many of todays
problemsalready require the inclusion of transonic and separated ow
ef-fects, detailed structural modeling, and provisions for
includingstructural nonlinearities.Future applicationswill likely
require thattemperature effects and chemical reactionsbe included
in the sim-ulations. It is our opinion that methods should continue
to be de-veloped on three levels of complexity: 1) linear methods
2) mod-erate delity methods (including viscous/inviscid interaction
tech-niques, ROM, etc.) and 3) high-delity methods (RANS
aerody-namics, structuredand unstructuredgrid methods, nonlinear
FEM,
-
7/24/2019 Computational Aeroelasticity
13/14
SCHUSTER, LIU, AND HUTTSELL 855
etc.). During this development,considerationmust be given to
howthe methods can be effectively employed in a design
environment,not just as a postdesign analysis tool. They should
also be de-veloped with the specic objective that they be readily
integratedinto existing aeroelasticanalysis frameworks.Finally, and
most im-portant, the new methods must be sufciently general in
applica-tion, robust and efcient in operation, and simple in
implementa-tion to make them a viable tool for general use in the
aerospaceindustry.
References1Theodorsen, T., General Theory of Aerodynamic
Instability and the
Mechanism of Flutter, NACA Rept. 496, May 1934.2Giesing, J. P.,
Kalman, T., and Rodden, W. P., SubsonicUnsteady Aero-
dynamics for General Congurations; Part II, Volume IIComputer
Pro-gram N5KA, Air Force Flight Dynamics Lab., Rept.
AFFDL-TR-71-5,Pt. 2, Vol. 2, WrightPatterson AFB, OH, April
1972.
3Liu,D. D.,James, D.K., Chen, P. C.,and Pototzky,A.
S.,FurtherStudiesof Harmonic Gradient Method for Supersonic
Aeroelastic Applications,
Journal of Aircraft, Vol. 28, No. 9, 1991, pp. 598605.4Harder,
R. L., and Desmaris, R. N., Interpolation Using Surface
Splines,Journal of Aircraft, Vol. 9, No. 2, 1972, pp.
189191.5Rogers, K. L., Airplane Math Modeling Methods for Active
Control
Design Structural Aspects of Active Control, Design,Structural
Aspects
of Active Controls, CP-228, AGARD, 1977, pp. 4-14-11.6Karpel,
A., Extension to the Minimum-State Aeroelastic Modeling
Method,AIAA Journal, Vol. 29, No. 11, 199 1, pp. 20072009.7Nam,
C., Chen, P. C., Liu, D. D., and Chattopadhyay, A., ASTROS*
with Smart Structures and ASE Modules:Application to
FlutterSuppressionand Gust-Load Alleviation, AIAA Paper 2000-1365,
April 2000.
8Johnson, E. H., and Venkayya, V. B., Automated Structural
Optimiza-tion System (ASTROS), Theoretical Manual, U.S. Air Force
Wright Aero-nautical Labs. AFWAL-TR-88-3028, Vol. 1,
WrightPatterson AFB, OH,Dec. 1988.
9Chen, P. C.,Liu, D. D., Sarhaddi, D.,Striz,A. G., Neill,D.
J.,and Karpel,M., Enhancement of the Aeroservoelastic Capability in
ASTROS, SmallBusiness TechnologyTransfer (STTR),WrightPatterson
AFB, OH,Phase 1Final Rept. WL-TR-96-3119, Sept. 1996.
10 Chen, P. C.,Jha, R.,Sarhaddi, D.,Liu, D. D., Grifn, K., and
Yurkovich,
R., A Variable Stiffness Spar (VSS) Approach for Aircraft
Maneuver En-hancement Using ASTROS, AIAA Paper 99-1471, July
1999.
11 Lee-Rausch, E.M., andBatina,J. T.,WingFlutter
ComputationsUsingan AerodynamicM odel Based o n the NavierStokes
Equations,Journal of
Aircraft, Vol. 33, No. 6, 1996, pp. 11391147.12 Lee-Rausch,
E.M., andBatina,J. T., WingFlutter BoundaryPrediction
Using Unsteady E uler Method, Journal of Aircraft, Vol. 2, No.
2, 1995,pp. 416422.
13 Gibbons, M. D., Aeroelastic Calculations Using CFD for a
TypicalBusiness Jet Model, NASA CR 4753, Sept. 1996.
14 Batina, J. T., Seidel,D. A., Bland,S. R., andBennett, R. M.,
UnsteadyTransonic Flow Calculations for Realistic Aircraft
Congurations, NASATM 89120, March 1987.
15 Edwards, J. W., Transonic Shock Oscillations and Wing
FlutterCalculated with an Interactive Boundary Layer Coupling
Method, NASATM-110284,Aug. 1996.
16 Dreim, D. R., Jacobson, S. B., and Britt, R. T., Simulation
ofNon-Linear Transonic Aeroelastic Behavior on the B-2,
Proceedingsof the CEAS/AIAA/ICASE/NASA Langley International Forum
on Aeroe-lasticity an d Structural Dynamics 1999,
NASA/CP-1999-209136, 1999,pp. 511521.
17 Obayashi, S., and Guruswamy, G., NavierStokes Computations
forOscillating Control Surfaces, AIAA Paper 92-4431, Aug. 1992.
18 Klopfer, G. H., and Obayashi, S., Virtual Zone NavierStokes
Compu-tations for Oscillating Control Surfaces, AIAA Paper 93-3363,
July 1993.
19 Obayashi, S., Chiu,I.-T., and Guruswamy, G. P.,
NavierStokesCom-putations on Full-Span WingBody Conguration with
Oscillating ControlSurfaces, AIAA Paper 93-3687, Aug. 1993.
20 Byun, C., and Guruswamy, G. P., Aeroelastic Computations on
WingBody-ControlCongurationson Parallel Computers, AIAAPaper
96-1389,April 1996.
21 Schuster, D. M., Beran, P. S., and Huttsell, L. J.,
Application of theENS3DAE Euler/NavierStokes Aeroelastic Method,
R-822, AGARD, Pa-per 3, March 1998.
22 Bartels, R. E., and Schuster, D. M., Comparison of Two
NavierStokes Methods with Benchmark Active Controls Technology
Experi-ments,Journal of Guidance, Control, and Dynamics, Vol. 23,
No. 6, 2000,pp. 10941099.
23 Schuster, D. M., and Bartels, R. E., Benchmark Active
Controls Tech-nology (BACT) Wing CFD Results, Verication and
Validation Data forComputationalUnsteady Aerodynamics, St. Joseph,
Ottawa/Hull, RTO-TR-26, Oct. 2000, pp. 225238.
24 Guruswamy, G. P., Unsteady Aerodynamic and Aeroelastic
Calcula-tionsfor Wings Using Euler Equations,AIAA Journal, Vol.28,
No.3, 1990,pp. 461469.
25 Krist, S. L., Biedron, R. T., and Rumsey, C. L., CFL3D Users
Manual(Version 5.0), NASA TM-1998-208444,June 1998.
26 Schuster, D. M., Vadyak, J., and Atta, E., Static Aeroelastic
Analysis
of Fighter Aircraft Using a Three-Dimensional NavierStokes
Algorithm,Journal of Aircraft, Vol. 27, No. 9, 1990, pp.
820825.
27 Schuster, D. M., Scott, R. C., Bartels, R. E., Edwards, J.
W., andBennett, R. M., A Sample of NASA Langley Unsteady Pressure
Ex-periments for Computational Code Evaluation, AIAA Paper
2000-2602,June 2000.
28 Edwards, J. W., Calculated Viscous and Scale Effects on
TransonicAeroelasticity, R-822, AGARD, Paper 1, March 1998.
29 Edwards, J. W., Schuster, D. M., Spain, C. V., Keller, D. F.,
and Moses,R. W., MAVRIC Flutter Model Transonic Limit Cycle
Oscillation Test,AIAA Paper 2001-1291,April 2001.
30 Beran, P., and Silva, W., Reduced-Order Modeling: New
Approachesfor Computational Physics, AIAA Paper 2 001-0853, Jan.
2001.
31 Dowell, E. H., and Hall, K. C., Modeling of
FluidStructureInteraction, Annual Review of Fluid Mechanics, Vol.
33, 2001,
pp. 445-490.32 Silva, W. A., and Bartels, R. E., Development of
Reduced-Order Mod-els for Aeroelastic Analysis and Flutter
Prediction Using the CFL3Dv6.0Code, AIAA Paper 2002-1596, April
2002.
33 Hong, M. S., Kuruvila, G., Bhatia, K. G., SenGupta, G., and
Kim,
T.,EvaluationofCFL3DforUnsteadyPressureandFlutterPredictions,AIAAPaper
2003-1923, April 2003.
34 Thomas, J. P., Dowell, E. H., and Hall, K. C.,
Three-DimensionalTransonic Aeroelasticity Using Proper Orthogonal
Decomposition BasedReduced Order M odels, AIAA Paper 2001-1526,
April 2001.
35 Thomas, J. P., Dowell, E. H., and Hall, K. C., Modeling
Viscous Tran-sonic Limit Cycle Oscillation Behavior Using a
Harmonic Balance Ap-proach, AIAA Paper 2002-1414, April 2002.
36 Edwards, J. W., and Wieseman, C. D., Flutter and
DivergenceAnalysisUsing the Generalized Aeroelastic Analysis
Method, AIAA Paper 2003-1488, April 2003.
37 Pulliam, T., Time Accuracy and the Use of Implicit Methods,
AIAAPaper 93-3360, July 1993.
38 Jameson, A., Time Dependent CalculationsUsing Multigrid,with
Ap-plicationsto Unsteady FlowsPast Airfoils andWings, AIAAPaper9
1-1596,1991.
39 Melson, N., Sanetrik, M., and Atkins, H., Time-Accurate
NavierStokes Calculations with Multigrid Acceleration, NASA
CP-3224, Pt. 2,1993, pp. 423437.
40 Rumsey, C. L., Sanetrik, M. D., Biedron, R. T., Melson, N.
D., andParlette, E. B., Efciency and Accuracy of Time-Accurate
TurbulentNavierStokes Computations,Computers and Fluids, Vol. 25,
No. 2, 1996,pp. 217236.
41 Jones, W. T., and Samareh-Abolhassani, J., A Grid Generation
Systemfor Multi-Disciplinary Design Optimization,Proceedings of the
12th AIAAComputationalFluid Dynamics Conference, Pt. 1 (A95-36501
09-34), San
Diego, CA, June 1995, pp. 474482.42 Reuther, J., Jameson, J.,
Farmer, J., Martinelli, L., and Saunders, D.,Aerodynamic Shape
Optimization o f Complex Aircraft Congurations viaan Adjoint
Formulation, AIAA Paper 96-0094, Jan. 1996.
43 Hartwich, P. M., and Agrawal, S., Method for Perturbing
MultiblockPatched Grids in Aeroelastic and Design Optimization
Applications, AIAAPaper 97-2038, June 1997.
44 Batina, J., Unsteady Euler Airfoil Solutions Using
Unstructured Dy-namic Meshes, AIAA Paper 89-0115, Jan. 1989.
45 Batina, J. T., Unsteady Euler Algorithm With Unstructured
DynamicMesh for Complex-Aircraft Aeroelastic Analysis, AIAA Paper
89-1189,April 1989.
46 Robinson, B. A., Batina, J. T., and Yang, H. T., Aeroelastic
Analysisof Wings Using the Euler Equations with a Deforming Mesh,
Journal of
Aircraft, Vol. 28, No. 11, 1991, pp. 781788.47 Farhat, C.,
Degand, C., Koobus, B., and Lesoinne, M., An Improved
Method of SpringAnalogyfor DynamicUnstructuredFluid Meshes,
AIAAPaper 98-2070, April 1998.
48 Bartels, R. E., An Elasticity-Based Mesh Scheme Applied tothe
Computation of Unsteady Three-Dimensional Spoiler and Aeroelas-tic
Pro blems, Proceedings of the 14th Computational Fluid
DynamicsConference, Norfolk, VA, Vol. 1 (A99-33467 08-34), JuneJuly
1999,pp. 458468.
-
7/24/2019 Computational Aeroelasticity
14/14
856 SCHUSTER, LIU, AND HUTTSELL
49 Chen, P. C., and Hill, L. R., A Three-Dimensional Boundary
El-ement Method for CFD/CSD Grid Interfacing, AIAA Paper
99-1213,Aug. 1999.
50 Melville, R., Nonlinear Mechanisms of Aeroelastic Instability
for theF-16, AIAA Paper 2002-0871, Jan. 2002.
51 Sheta, E. F., andHuttsell, L. J., Numerical Analysis of
F/A-18 VerticalTail Buffeting, AIAA Paper 2001-1664,April 2001.
52 Denegri, C. M., Jr., Limit-Cycle Oscillation Flight Test
Results of aFighter with External Stores, Journal of Aircraft, Vol.
37, No. 5, 2000,pp. 761769.
53 Batina, J. T., Unsteady Euler Algorithm with unstructured
DynamicMesh for Complex-Aircraft Aeroelastic Analysis, AIAA Paper
89-1189,April 1989.
54 Rausch, R. D., and Batina, J. T., Three-Dimensional
Time-MarchingAeroelastic Analyses Using an Unstructured-Grid Euler
Method, AIAA
Journal, Vol. 31, No. 9, 1993, pp. 16261633.55 Farhat, C.,
Geuzaine, P., Brown, G., and Harris, C., Nonlin-
ear Flutter Analysis of an F-16 in Stabilized, Accelerated, and
In-creased Angle of Attack Flight Conditions, AIAA Paper
2002-1490,April 2002.