Embed Size (px)
Citation preview

Computation and Parametrisation of Invariant Curves and ToriAuthor(s): Gerald MooreSource: SIAM Journal on Numerical Analysis, Vol. 33, No. 6 (Dec., 1996), pp. 2333-2358Published by: Society for Industrial and Applied MathematicsStable URL: http://www.jstor.org/stable/2158473 .
Accessed: 14/06/2014 00:00
Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at .http://www.jstor.org/page/info/about/policies/terms.jsp
.JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range ofcontent in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new formsof scholarship. For more information about JSTOR, please contact [email protected].
.
Society for Industrial and Applied Mathematics is collaborating with JSTOR to digitize, preserve and extendaccess to SIAM Journal on Numerical Analysis.
http://www.jstor.org
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

SIAM J. NUMER. ANAL. (?) 1996 Society for Industrial and Applied Mathematics Vol. 33, No. 6, pp. 2333-2358, December 1996 013
COMPUTATION AND PARAMETRISATION OF INVARIANT CURVES AND TORI*
GERALD MOOREt
Abstract. We develop new algorithms for computing invariant tori of autonomous systems and invariant curves of periodically forced systems. Our key idea is the choice of a two-stage parametrisation procedure. The manifolds are first computed using a parametrisation based on a known nearby manifold. This parametrisation is then relatively cheaply replaced by a conformal parametrisation in the case of invariant tori or by a form of arclength in the case of invariant curves.
Key words. invariant curve, invariant torus, quasi-conformal mapping
AMS subject classification. 65L
1. Introduction. We consider the computation of invariant 2-tori for the autonomous system
(1.1) u = F(u) F: 9' H- 9 n > 3
and always assume that F is at least a Cl function. If M is an embedding of S1 x S1 in in, then M is invariant for (1.1) iff
(1.2) PI+MF(x)=O Vx E M,
where PA is the orthogonal projection onto a subspace A of gin, P? I - PA, and TXM is the two-dimensional tangent space of M at x. We regard equation (1.2) as fundamental, and it is the basis of our computations. It provides n -2 equations at each point of M, and the missing two equations reflect the lack of a chosen parametrisation. (Together with a particular parametrisation, (1.2) becomes a partial differential equation (p.d.e.) defining M.) In the usual case of F depending on a parameter A, i.e., F: gin X 9J -+ gin , and in the situation where we have already computed an invariant torus M0 for the neighbouring problem
(1.3) u = F(u, X0),
M may be parametrised by M0; i.e.,
(1.4) M4-x?+Lain(x): X E MoJ,
where { n (x) .. , n 2(x)} spans a subspace transversal to TXM0. This strategy, however, should not be used repeatedly without additional safeguards because, in general, the parametri- sation will gradually break down. Hence we suggest that, at each value of A, the inherited parametrisation should be "repaired" before proceeding to the next continuation step. Of course there are many different ways of doing this, but we believe that our choice of confor- mal coordinates in ?2 is the natural generalisation of arclength for one-dimensional manifolds.
A recent paper that presents a numerical scheme for computing invariant tori is [4]. They assume that F is already in the form F: Mn-2 X SI X S > xn-2 X 9 x , i.e.,
u (V1I . . . Vn-2, 01, 02) (V, 01, 092)
*Received by the editors February 9, 1994; accepted for publication (in revised form) January 31, 1995. tMathematics Department, Huxley Building, Imperial College, 180 Queen's Gate, London SW7 2BZ, U.K.
([email protected] or na.gmoore).
2333
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2334 GERALD MOORE
and
F (u)-(_F (v, 01, 02), fl (V, 01, 02), f2 (V, 01, 02))
Hence (1.1) can be written
v = F(v, 0i, 02),
(1.5) 01 = fl(v, 0i, 02),
02 = f2(v, 01, 02)
and so an invariant torus of the form (v(01, 02), 01, 02) satisfies
(1.6) fi(v, 01, 02) a ?f + f2(v, 0, 02) aO2 = F(v, 01, 02).
Algorithms for solving (1.6) are given in [5, 6, 7]. This system links up with our equation (1.2) because (1.6) is just the condition that
(F(v, 01, 02), fl (V, 01, 02), f2 (V, 01, 02))
is in the subspace spanned by
{aol )'aO2'')
It is always possible to use a previously computed torus M0 and coordinates (1.4) to express (1.1) in the form (1.5), but for practical computation this seems unnecessarily complicated compared with (1.2). Of course, periodic variables may be introduced in a simple way through polar coordinates, e.g., under the transformation
ul= rl COs , u2= r1 sin 01 U3 = r2 COS 02, U4 = r2sin 02,
(1.1), with n = 4, becomes
r = R(r, 01, 02),
01 = e1(r, 01 02),
02 = 62(r, 01 02).
In general, however, (r(01, 02), 01, 02) will not be a proper parametrisation of the torus. In any case, it seems preferable to remain flexible in the choice of parametrisation. [We note that in [8] a discrete version of the Hadamard graph transform is applied.]
We point out here that this paper is not concerned with the question of persistence of invariant tori under perturbations of the vector field F. For fixed points and one-dimensional invariant manifolds like periodic and connecting orbits, this is relatively simple to answer. For higher dimensional invariant manifolds, however, the conclusion is more complex and the fundamental papers are [9, 12, 20].
We also consider the computation of invariant curves for the periodically forced system
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2335
where F is Tf-periodic in t. Thus by simply scaling time we can and do assume that T =1. This problem is considered in [4, 8, 14, 22, 23]. If P is a closed curve in M'R and P is the Poincare map for (1.7) over a time period, then P is called an invariant curve of (1.7) if PP = P'. Of course this does not mean that points on P are necessarily mapped onto themselves by P. If I`(t) denotes the time variation of I, the two-dimensional surface M Ut[o, 1] (P(t), t) in 9J' x 9J may be considered as an invariant torus for the autonomous system
(1.8) u = F (u, t),
through the time periodicity. As in (1.2) we require that
(1.9) P<)M [I F )x ] = 0 VX E [(t).
Now if TxP (t) denotes the tangent space of P (t) in 9JV at a point x, then the fact that (TX o(t)) c T(x,t)M allows us to simplify (1.9) to
(1.10) PJTr(t) [F(x, t) - w(x, t)] = 0 Vx E r(t),
where w(x, t) E 9P satisfies (w(x't)) E T(x,t)M. In ?4, having introduced a parametrisation of M involving time, we shall see that there is a natural choice of w(x, t).
To conclude this introduction we give a simple illustration of invariant tori from [15, 16]. The system of equations
= (= -3)x -4y + x{z + 0.2(1 - z2)}, (1.11) y= 4x + ( - 3)y + y{z + 0.2(1 - z2)},
=X z-(x2 + y2 + z2)
has (i) steady solutions (0, 0, 0) and (0, 0, A) 'I, (ii) a Hopf bifurcation on the latter curve at X = 5 -X VI 1.68, (iii) a Hopf bifurcation to tori at X = 2, (iv) the torus "bursting" at X ; 2.049.
Because of the simplicity of the periodic solutions, we may reduce the problem to 9J2 by switching to polar coordinates x = r cos 0, y = r sin 0 and this gives
r-1(X-3)r + r{z + 0.2(1 - Z2)), (1.12) z-Xz - (r2 + z2)
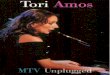
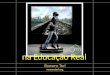
with 0 = 4. The steady (r, z) solutions of (1.12), which correspond to periodic solutions of (1.11), have a Hopf bifurcation at (r, z, A) = (1, 1, 2), which corresponds to (iii) above. The periodic solutions of (1.12) thus created terminate in a heteroclinic cycle, which corresponds to (iv) above. These periodic solutions were computed by COLCON[2] using the methods of [18], and their lengths are plotted against X in Figure 1. The corresponding tori of (1.1 1) are shown for X = 2.0026, 2.0111, and 2.0248 in Figures 2-4.
2. Computation and parametrisation of tori. In this section we show how to param- etrise our invariant torus in terms of a known neighbouring torus and then how to compute it by an approximate Newton method applied to (1.2). Finally a conformal reparametrisation of the new torus is obtained by solving a Laplace-Beltrami system.
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2336 GERALD MOORE
Length
6
5
4
3
2
1
0 Lambda 2.005 2.01 2.015 2.02 2.025
FIG. 1.
z
X 0.5 1 /~~~~~~0.
FIG. 2.
2.1. Parametrisation from a previous torus. We seek a torus M satisfying (1.2) and assume we already possess the representation u0(O), with periodic 9 (0(1), 0(2)) E [0, 1]2, of a nearby torus MO. We utilise the fact that M may be parametrised by MO and seek M in the form
n-2 (2.1) u(6) uO(6) + Zai(6)n0(),
i=l
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2337
/ /1
0. 5\
FIG. 3.
where In?(8), ... .,n2(6) } is a smooth basis for the subspace
I au0 auo i-' j, ()(0'~ (2) (6)1
Hence if DU(6) denotes the subspace spanned by
(au au 1 (ao(t)@) ao(2)(j
then we require
(2.2) PiDU(e(1)we(,DF(U(2)) = O
or equivalently
nj(9)T [F (UO(O) + oZai(6)no(6))] = O
j = 1, . . ,n -2, where {n,(60), . .. , nn2(A)} spans DU(6)J-. This set of nonlinear equations for la, (6), . . ., an -2(O)) may be solved by an approximate Newton's method as follows.
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2338 GERALD MOORE
2
z
1w5\~~~~a _ (6 =
0.5 _
1/
F;IG. 4.
From (2.2) we really want to find (al1(@), . . an -"2 (0) , pI I (0), and p(2) (0) SO that
(2.3) F(u(6)) - fi(l(0) au)1) () () p(2 (2) (0) = ?
The full linearisation of this equation with respect to {a I (6), .O.. , an-2 ()), ,B(1) (6), and ,(2) (6) is
n-2
F(u(6)) + E ai ()DF(u(6))n?(0) i=1
-(1)(0) au (6)
a (1) (n) a1 ()
(2)(6) au (0) - f(2)() (0Z ao i ?
-o2) (6) ( (2)x (6a) = O. 0) (6)
_ Sp () (0.aeU(0 0.
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2339
Hence the a-increments may be calculated from
n-2
P U(0(1)o0(2)) F(u(O)) + E 8ai (O)DF(u(O))n?(0)
i=l n-2
(2.4) _0J30 E al ai (O)n (O) }
- t3 (0) E a2 i {Sai(0)n (0)JJ = 0.
For efficiency's sake we do not calculate the ,-increments but work with an approximate Newton's method. Thus for each u(0), we take /3 _ (1) (0), p(2)(0))T as the solution of the least squares problem DU(0)f = F(u(0)), using the slight extension of notation described below; i.e.,
_ g(0)F(u(0))T au(1) (0) - f(0)F(u(0))T au (0)
(2.5)0) = e(0)g(0) - f(0)2 (2.5)
e(0)F(u(0))T 'u(2) (0) - f(0)F(u(0))T AU (0) = e(0)g(0) - f (0)2
where
e(0) - (O)T aU (
(2.6) 0) -au (0) (0)"
g0) -a OT____ g(49 - ao(2) ao 0(2) (0)
In ?3 we shall apply this approximate Newton's method to solve a discretised form of (2.2). An alternative way of deriving our iterative method, which shows clearly that quadratic
convergence is retained, is to consider the linearisation of the projection in (2.2). With a slight extension of notation we regard DU (0) as the n x 2 matrix with columns { ,8(0) (0), ao(2) (0) and let PA(t). where A (r) denotes a set of n x k matrices of full rank depending smoothly on v, be the orthogonal projection onto the column space of A(r). It is shown in [21] that
d PA(r) -p I dA(r) [A(T)TA(r)]1 A(r)T
(2.7) ~ dr A (r) dr
+ A(T) [A(v)TA()]1 dA(v)"
PI dv A(r),
Consequently, since (2.2) holds for the torus we seek, we can obtain an approximate lineari- sation by omitting the second term in (2.7) and this just gives (2.4-2.5).
Note that for n = 3 we may use vector products and write n10(0) =au (0) x auo (0) and n(0) = -u (0) x 'u (0). Thus (2.2) becomes the scalar equation
(2.8) [&o(1) {u0(0) + a (0)no(0)} x (u0(0) ? a(0)no(0)}] F(u0(0)
+ a(0)n0(0)) = O
for a (0), which may be solved by the standard Newton's method.
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2340 GERALD MOORE
2.2. Conformal parametrisation of tori. At present our 2-torus is described by periodic coordinates (0(1), 0(2)) based on the parametrisation of a nearby torus. We wish to prevent any breakdown in the parametrisation by "repairing" it at each step, i.e., constructing a new canon- ical parametrisation analogous to arclength for orbits [18]. To achieve this aim we make use of the fundamental result that every 2-torus is conformally equivalent to a periodic parallelogram in 9t2 [13]. The vertices of the parallelogram are taken to be (0, 0), (1, 0), (X, Y), (X + 1, Y) with Y > 0, and the pair (X, Y) is called the modulus of the parallelogram. A simple explanation patterned after our requirements is given below; for more details refer to [3, 13].
The choice of (X, Y), with Y > 0, is not unique because periodic parallelograms belong to conformal equivalence classes. Note that some normalisation has already been introduced by placing one vertex at the origin, one side along the positive x-axis with unit length, and the parallelogram in the upper half-plane, and thus translations and rotations have been eliminated. This is not sufficient for uniqueness, however, because there is still a group of automorphisms given by the famous modular group PSL (2, Z), i.e.,
A (aX + b)(cX +d) +acy2
(2.9) X (cX + d)2 + c2y2 y2_93
(cX + d)2 + C2y2'
where a, b, c, and d are integers with ad - bc = 1. If one restricts (X, Y) to the subset of the upper half-plane defined by
(i) --< X<-I (2.10) 2 - 2
(ii) X2 + y2 > I with equality only for X < 0,
then the choice of (X, Y) is unique for each torus. Note that, for this subset, the angles in the parallelograms are bounded between 3 and 23 3 3*
The reason for (2. 1Oii) above is easy to illustrate because it only arises through insisting that the unit side along the x-axis in the parallelogram is the smaller side. Thus if we have a periodic parallelogram with X2 + y2 < 1, this is conformally equivalent to the periodic parallelogram with
X= -x
A y
X2?+y2'
which corresponds to a = 0, b =-1, c = 1 and d = 0 in (2.9). The conformal mapping between z x + iy and w u + iv is simply
xX+yy X2 + y2'
XY - yX V=X2 + y2-
In other words, this restriction is necessary to remove the lack of uniqueness over whether the longer side of the parallelogram lies on the x-axis or not. Putting X2 + y2 = 1 also shows why the sign restriction on X is necessary in (2. 1Oii) above.
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2341
The reason for restriction (2. 1Oi) above is more subtle. Note that if we have a periodic parallelogram with mi-2 < X < m + ? for some integer m then this is conformally equivalent 2 -2 to the periodic parallelogram with
X=X-m,
y=Y,
which corresponds to a = 1, b = -m, c = 0, and d = 1 in (2.9). The conformal mapping is just the identity, making use of the periodicity. The subtlety is that vectors parallel to (X, Y) in the u - v plane are mapped to lines which wind Im I times around the periodic parallelogram in the x - y plane, the direction of winding depending on the sign of m.
Once we have an (X, Y) periodic parallelogram which is conformally equivalent to our torus, then the mapping
(Q(1), 0(2)) _ (0(1) + 0(2)X, (2)y)
provides new periodic coordinates on the unit square for the parallelogram and hence for the torus.
2.3. Beltrami systems and quasi-conformal mappings. At present we have our torus described by u(O) E 91', where 0t (Q(1), 0(2)) ranges over the unit square. Hence e(0), f (0), and g(O), the components of the first fundamental form of the torus, may be calculated from (2.6). Now if we want to map our torus conformally onto a periodic parallelogram then we must construct the quasi-conformal mapping (x, y): (0) e> 912 satisfying the Beltrami system [17, 19, 24]
ax ~ ~ /ay a0(2)
M(~~~o()YO ax_
ay -
a? M(O)( aoy )
80(i) a0(2)
or its inverse
(aay )=M(0) (ax -a(Y) \0(2)
where
S(f9) ( -f (f) e(f9))
and S(O) e(O)g(O) -(O)2. The boundary conditions which enforce the periodic paral- lelogram structure are
x(1, 0(2)) = X(0, 0(2)) + 1, ax (1, X(2) (0, (2)), a0(i1'0(2) - a '
x(0(l), 1) = x(0(l), 0) + x, ax ( 1)= ax (0(1), 0)
(0(1),( 0
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2342 GERALD MOORE
and
y(0(l), 1) = y(0(l), 0) + Y,
aY- (0(1), 1) = ( (0(1), 0),
y(l, 0(2)) = y(0 0(2)),
ay, (1 0(2)) - (0, 0a(2)).
Consequently, if we let z(0) and 2(O) be the solutions of
(2.11) V (M(O) V) z(0) = 0,
(V = (a/a0(1), a/ao(2))T) with boundary conditions
z(0(1), 1) = z(0(1), 0) + 1,
az,(0(1), 1) = a (0(1), 0), z(l, 0(2)) = z(0, 0(2)),
a,(1,0 (2)) az (0 0(2))
and
Z(1, 0(2)) = Z(0, 0(2)) + 1,
az,(1 0(2)) = az (0 0(2))
Z(0(1), 1) = Z(0(1), 0),
aZ (0(1) 1) = az (0(1)9 0)9
respectively, then
(2.12) y() =Y(0)9 x (0) = 2(0) + Xz(0).
We have omitted the arbitrary constants, which may be chosen so that x (0, 0) = y(O, 0) = 0. Finally, inserting the form (2.12) back into the first-order Beltrami system determines X, y through
I |Z||2M 111 - 1
(2.13) Z M 1
11 II112 9
where
zi2 _A (VZ)T M(O) Vz d (1) dO(2)
Thus, making use of periodicity, the function (x, y) is an invertible mapping from the periodic unit square onto our periodic parallelogram.
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2343
2.4. Algorithm for tori. Here we state clearly the steps in our algorithm. (i) Solve (2.2) to obtain u(O). (ii) Solve (2.1 1) with appropriate boundary conditions to obtain scalars X and Y from
(2.13) and functions x and y from (2.12) such that x(0, 0) = y(O, 0) = 0. (iii) If desired, we can now alter X, Y, and (x, y) so that (2.10) holds. (iv) Denote the points on our periodic parallelogram by (0(l), (2)) E [0, 1]2, where
a = q5(l) + 0(2)X,
b -(2)y
is such a point. We then define
v (o(1), 0 (2)) = U(t )
where
a x(,) b =y(t, )
Using (2.12), this last pair of equations may also be written
(2.14)~ ~~~~(1 ~(t' o 0(2) A(
?
(v) Changing notation back from ?(1), 0(2), and v to 0(1), 0(2), and u then gives us the torus with a new parametrisation.
3. Numerical approximation and results for tori. Our representation of the required torus is the mapping u(0(1), 0(2)) and so to approximate it we place a grid over [0, 1]2, i.e.,
o = 0(1) < 0(1) < *- . /I(1() _ I
0 = 2) < (2) < ... < 0(2)) I
Because of the periodicity, the points 0(1) 0(2) are identified with 0(1) (2) respectively. Hence we seek to compute an array of vectors in 91',
Ui1 i = 1, ... m(l) j = 1 m(2)
which approximate u(Oi(), 072)) and thus the Uij are regarded as gridpoint values of an ap- proximating piecewise bilinear function.
3.1. Smooth parametrisation from previous torus. As always we assume that we have knowledge of a nearby torus in the form
U?0 i=1,... m (l) j M
1 (2)
and write
n-2
(3.1) Ui = U + EkijNkij k=1
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2344 GERALD MOORE
where No k = 1, n - 2 is an orthonormal basis for the orthogonal complement of ki]
U0 - U. U0 02 ) (3 .2) {o (1) -o - l) i+(1J ) 91 + (6)1+ l-ai) ij i-l' ))
0 -1 (1) - 0(1) 1+1 1 0(1) - 0(1)
(3.2) 1+1 i-
(0(2) - 0(2) . U00 - UU (2) _ (2) ) +1 ?j (2) _ 0(2)) ii iJ-1 (O J. 0(2) - 2 0 -+2) j+1
j 0 0 -(2)J 1+1 1i 1 1-1
Thus we are using the tangent space near each gridpoint. These bases may be computed by standard means, e.g., Householder reflections [10], but are not unique and will not in general be smooth over the whole torus for n > 3. Hence we would like to apply orthogonal (n -2) x (n -2) matrices Qij to minimise the sum of the squares of the first divided differences of the basis elements, i.e.,
m (l)m(2) 1
(3.3) i,~1 7-l (0(1) - (1) )2 11 - N5U_11 Q'i, I F
+ (92) - (2) II Nij Q, - No Q lj_l 2
[Here No. denotes the n x (n -2) matrix with kth column N?ij.] {N? Qij} would then be used as a smooth basis for the orthogonal complement of (3.2). Now (3.3) is a quadratic minimisation problem with positive semidefinite Hessian, since the objective function is unchanged if each Qij is postmultiplied by the same orthogonal matrix. It is well known that such problems may be solved by minimising with respect to each variable or each block of variables in turn. (In the positive definite case this corresponds to the Gauss-Seidel or block Gauss-Seidel method.) Here it is natural to minimise in turn over the block of variables in each Qij, since minimising
I(9(1)Qi - NoJjI ? 1
INo+, - No ,Qj11I2 (10) - n(1) )2 ii ajQij-NE-1 2F + 9(1) - (1))2 1 j-N0j ij F (i Ui-l)(i+ i)
+ (9) 0(12) I2N115 iQg - N?i> F ? (2) I I(2) N 2 11 -N0gj IIF
is a variant of the well-known orthogonal Procrustes problem [10]. Its solution is that the required Qij is the orthogonal polar factor of the (n - 2) x (n - 2) matrix (NoJ)TN7J, where
N N7+l,j ? N? NJ+1 N+ 0 i (l.(+) - i0))2 (00) _- (1) )2 (9(2) _ (9(2)_ 0(2) )2-
Hence, by minimising (3.3) with respect to the components of each Qij in turn and repeatedly replacing N9. <- N9. Qgj, we carry out a form of block Gauss-Seidel iteration which will minimise (3.3) and obtain a smooth basis.
3.2. A "box" scheme and its solution. Now we wish to compute alkij, k = 1. n - 2; i = 1, ..., m(1); j = 1, ... . m (2). To achieve this we employ a box method and insist that (2.2) holds at the centre of each rectangle, i.e.,
(3.4) PjUI+F(Ui+j+) = 0,
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2345
where Ui++ _ {Uij + Ui+,j + Ui,j+l + Ui+,1j+l } and DUj+j+ is the subspace spanned by {D"1' (Uij), D(2) (Uij) } with
D(1) (Uij) U_ - U ? Ui+l,i+l - Ui,j+l h 2(04il - 0 M)
D ()(Uij) __u,+ - Uii ? Ui+i,}+i - Ui+i,}. h 2(0
(2) ~~- 952))
Our reason for employing a box method is simply that this seems to be the most compact scheme, i.e., leading to a four-point difference stencil rather than the five-point stencil used in [4].
Next, as part of our approximate Newton's method corresponding to (2.4), we need to solve
o PDU+J [F(Ui +j+ ) ? 4i jE8akiijDF(U +j+ )N5ki j
n-2 n-2 ? 8?&k,F(Ui+j+)DF(UNkji j ? jj k,i,j+ l DF(UN+j+)N? ki +
k=l k
n -2
? 8?iL, j+Sauij)ksi+1 j+l1
n-2 n-2
-t j+ E D() (akijNki) )-() k DSk) (Saki jNlkD ij)I N k= k=1
where
() gi?j?F(Ui?j?)TDhl )(Uij) - fi+jF(U1++) TDh2 )(Uij)
tS++ = U,+,+ DF ei+j+)Nki+lj+-f+j
() ei? j?F(Ui? j+)TDh7) (Uij) - f+ j+F(Ui+ j+)TDh ) (Ui1)
with
D(i) SkjN+ij _D ~(2ij) ) Dh (2) j), jNij
Fgi+j+--D(lh)(Uij)) -h f)j(Ui+j), D() Uj
the discrete analogue of the functions e, f, and g defined in (2.6). This system can be written
(3.5) PDU ? ? A?)( 6ai,1 ? h 1 h ] = 0,
where 6aij-(8Ola1 . . .,ae io2jFij)TD etc.,
C11--F(Ui+j+)
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2346 GERALD MOORE
and the Aij are n x (n - 2) matrices whose kth columns are
A?Y = -DF(Ui+j+)N2ij + +Ni2 + ) A = 4 D(+)k, i + l j-P+ j+ 2(0(1) - 0 ) )+ ++ 2(0 (2) (2))
A10 = 4 '~'-'Z+J+)"k,i?1,j - +N i+ j+,82 N 0(2)
1 0 No No A01 = ,, I~~~~Z+J+2(01 kD0il)) -,(2) k,il,jA-
AU0,1 = 4 DF(Ui+j+)Nk,il,j + i++ 2(0(2) - 02)) Al ~D(~1)NO11? () N?iljlN
A = 4 +j+ 2(0(1) 01)) 2(0% 0(2))
Of course it is essential to utilise the above block structure when applying PDU and this is achieved below. By the appropriate choice of w1, w2 (cf. ?5) the Householder reflections H(w1)H(w2) have the property that the first n -2 components of H(w1)H(w2)v for any V E Sn' constitute P1 +vwhile the last two components constitute PDUiJ+,v. Hence if we operate on the columns of the n x (n - 2) matrices Ai0, etc., with H(w l)H(w2) and then omit the final two rows, we will obtain (n-2) x (n - 2) matrices /100 etc., and (3.5) can be written
(3.6) A??,5e + Al?6ai+l y + A?,l) kij+l + Al,j76ai+i,2 = cij.
Thus combining equations (3.6) Vi, ] will form the sparse system
Abea = c,
in which c and 62 1 have size (n-2)m(m (2) and Ais periodic block bidiagonal, withperiodic block bidiagonal blocks. The (nu-2) x (na-2) blocks of the latter being the matrices A above.
Note that for n = 3 we may simply discretise (2.8). This gives a set of scalar equations
[D( ) (Uiy ) x D(7) (Ui )J] F(Us+y+ ) = 0
for the scalars W2 , which may be solved by the standard Newton's method.
3.3. Discrete quasi-conformal mappings. Now to repair our parametrisation we wish to solve a discrete form of(2.v11) with appropriate boundary conditions; i.e., we must minimise
t1010 S(O |~ &0) -Z ) 2f(O)&o(l&o(2 +e(O) (i(2a))}0l)02
first over those functions with
Z(0(1), 1) - z(0(1), 0) = 1
and then over those functions with
z(l, 0(2))-xz( n a(0)) 1=
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2347
Our discrete form is obtained by replacing the coefficients in the above integral by piecewise- constant approximations and minimising only over piecewise bilinear functions. The integrals can then be performed exactly and this leads to the following sum:
M(l), m (2) 0 | (2) - (2) L 1 j~~~~i+ ,j+1
i,j=_1 Si+j + 3 3+ + 1) _ i(1)
*[(Zi+,j _-Zi,j)2 + (Zi+1,j -Zi, j)(Z +, j+1-Zi,j+1) + (Z1,, j+l-Zi,j+1)2]
1 (3 7) - fi+j+ [Zi+1,j -Zij + Zi+?,j+- Zi-j+1]
1 o (1) o(1) * [Zi,j+l- Z,j + Zi+,,j+l - Zi+?,] ?
iei i+, -
[(Z-,j+l _ Zi,j)2 + (Zi,j+l _
Zi,j)(Z-+-,j+l _ Zi+l,j) + (Zi+l,j+l_ -Zi+?,j)2]}
where Si+j+ _ ejjgj+- ++. The equations giving this minimum correspond to the following nine-point stencil in the uniform mesh case:
| l( _+ 3gy S,_y+ + Sl+j+ S (+J+-g+
e_y-,+2g _ 2 (g-+e-j)f-+ 2,y (g+ , ,+_ e,+,_-2g,+,_)
for i = 1,. ~ ] ,m() = 1 . .. () with the solution Z obtained with the boundary conditions
io= zi(2 1 } i = 1. ml Zi,m(2)+l = Zi,?1 J
and the solution Z through the boundary conditions
Zi,0 = Zi,m(2) i= 0,. .. 1
L =Zmj
Zm(l)+l,j = ,j 1 }1} The coefficient matrix for this system is symmetric positive semidefinite, with a single zero eigenvalue corresponding to the arbitrary constant. It also has periodic block tridiagonal structure, each block being periodic tridiagonal, and so many standard iterative methods are applicable.
Finally, our discrete conformal moduli are given by the analogue of (2.13), i.e.,
iji = iM2 - ZI2iWl - 1
Y=~~~ ~~ = 11 .. ZM(1)+'j - j'j + III1
Thecoffcint atixfo tis ysemissymeticpoitvesemdeinte wth snge e1
eigevalu corespodingto te aritrrI ostn.IZasIIMproiboktidaoa
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2348 GERALD MOORE
with
mf) mM(2)
IIZI12 E (04)? _ o (1))(o 25)- 052)) 1,j=1
*gi+j+(DZ(l j+)2 - 2fi+j+DZ2()j DZz(?j+ + ei+j+(DZz(1j )2 }, where
- Zi+l,-Zi1 + Zi+l,j+l-zi,j+ i+j+ - 2(0/1+ - 91))
DZ(2) Z Zi1j+ -Zij + Zi+l,j+l-zi+l,j i+j+- 2(0 (2 - o52))
Hence our discrete quasi-conformal mapping, corresponding to (2.12), is
xij = zij + Xz1ij
Yij = yzij.
3.4. Numerical algorithm for tori. Here we state clearly the steps involved in computing a new torus, given a representation for a neighbour.
(i) First we solve (3.4) for Uij. (ii) Next, we minimise (3.7) with appropriate side conditions to obtain Zij and Zij and
hence X, Y, Xij, and Yij. (iii) If desired, we can now alter X, 2y, Xij, and Yij so that (2.10) holds. (iv) Finally, we choose a new periodic mesh on [0, 1]2, i.e.,
o = '0(1) < 0(1)< < ()=1 __ (in(1)
O = 0(2) < ?(2) < ** < 'o(2))
and use inverse bilinear interpolation to find the required torus values Vij on this new mesh. Thus we carry out the discrete analogue of (2.14) and determine p, q and 1, 1 , 5 3, 5 e [0, 1) such that
oi( ) = nlZpq + n27p,q+1 + n3Zp+1,q + 74Zp+1,q+1,
5(2) j= =7lZpq + 72Zp,q+l + 3Zp+l,q + 74Zp+l,q+1,
making use of the periodicity, and then
Vij = nlUpq + 72Up+l,q + 73Up,q+l + 74Up+l,q+l1
(v) Changing notation back from q5(1), q5(2), and Vij to 0(1), 0(2), and Uij means that we are then ready to take another step in our continuation framework.
3.5. Coupled oscillator problem. As an example, we consider the equations
U1 = alul + 81u2 - (U2 + u2)u1 - X(ul + U2 - U3 -U4)
12 = -ull + 1u2 -(U2 + u 2) U2 - X(ul + U2 - U3 - U4),
U3 = a2U3 + i2U4 - (U2 + u4)U3 + X(U1 + U2 - U3-1U
U4 = -2U3 + a2U4 - (U2 + u4)U4 + X(U1 + U2 - U3 - U4)
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2349
A / / / /t t t 1,/ --0A ",A -, / ,t/1 t t / / ,V - - ,V,V,$
0.8 00 w w
/ - - A - -~-----t w I--, -0 A A/ / 0 /AAA - - --'--'---'-A/ / / / /A A--IAA- ,--- - _ -/ / / / /
0.6 00 / __/ tS t t / / /
.0o -- -v -w1 t t 0t / A t A
-_---_~~~~~~~~~~~-00 -_1 000 '01 1 tt 1M
0.4 4 -AAAAAA/ / t / /A-/--
----_-'_ A A A A A A A A / / / A-- '- 4 _ _ /#0 /w /w /e / f 00 t 00e 00 /e /e --w_ - '
--
A'~ A A / / / A A A A A-----
0.2 /,,/,AA/ / / / /AAAA---'---- -0o 1.0 t -1W 1001 / o o dw o 02 w o t t t / 0 100pe -1: w 1 t '01 OO .0 .0oo -0 I--
0 0.2 0.4 0.6 0.8 1
Thetal
FIG. 5.
from [1], for which numerical results have already been given in [4-8]. Without coupling, i.e., X = 0, there are two distinct periodic orbits of the separated equations, i.e.,
u1(t) = acos/,3t,
u2(t) = sin /3jt
and
u3(t) = a2cosS32t,
u4(t) = - a2 sin /2t,
which together may be regarded as a torus for the full four-dimensional system. When the coupling is switched on the periodic motion is lost but the invariant torus persists.
We use the same parameter values,
al = 1.0, 1 = 0.55, U2 = 1.0, 32 =0.55,
as in [4]. They employed a fixed parametrisation of the form described in the first section of the present paper and based on polar coordinates for the u1 - u2 and U3 - U4 planes which broke down at X = .2527. We employed the algorithm described in this section and our parametrisa- tion did not suffer this breakdown. (Of course the torus itself does not exist for slightly higher X values [8].) A uniform mesh with m1 = m(2) = 20 was used, together with X increments of 0.01 from 0 -> 0.25 and of 0.001 thereafter. For X = 0.253, the flow on the torus is shown in Figure 5, while Figures 6 and 7 display the closed curves (u1 (0(1), 0(2)), U2(0(1), 0(2))) for each 0 (2) and (U3 ( (1), 0(2)), u4 (0 (1), 0(2))) for each 0(l), respectively.
4. Computation and parametrisation of invariant curves. In this section we develop an algorithm to compute an invariant curve for the periodically forced system (1.7). Our
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2350 GERALD MOORE
1
Theta2
0.5~~0.
U1 ~ ~~~~~~~ 0.5
FIG. 6.
1
Thetal t
0.25\ / _
U3~~~~~~~~~~~U
U3 0I.7 5
FIG. 7.
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2351
approach is to regard this as a special case of the algorithm constructed in ?2 for tori of au- tonomous systems. Hence we do not repeat all the details that were there. The key difference is that time is now regarded as a special coordinate, which is respected both in the parametri- sation by a previously computed torus and in the reparametrisation process. This naturally leads to the choice of arclength coordinates for the invariant curves.
We seek a "torus" M satisfying (1.9) and assume we already possess a representation u0(O, t) of a nearby torus MO. For each fixed t, 0 will be close to an arclength parameter for the closed curve u0(0, t). We utilise the fact that M may be parametrised by MO and seek M in the form
n-I
(4.1) u(0, t) u0(0, t) + aiL(0, t)n?(0, t), i-l
where {no (0, t), ... no (0, t)} spans the subspace orthogonal to { auo (O, t) }. Hence it is natural to choose au for w in (1.10), and, if DU(O, t) denotes the subspace spanned by at {a (0, t) }, then we require
(4.2) PDU(0,t) [- a(0, t) - F(u(0, t), t)] =,
or equivalently
n1(0, t)T [+ {u(9 t) ? Li(0, t) no(0, t)}
n-1
-F(u0(9, t) + Lai(0, t)n?(0, t), t) =0 i=l
for = 1, n-1, where {n1(0, t), ..., nn_1(0, t)} spans DU(O, t)-. This set of nonlinear equations for {a1 (0, t), . an-l (0, t)} may be solved by an approximate Newton's method as follows.
Solving equation (4.2) is equivalent to finding {a, (0, t), . a . ., O- (0, t)}, p8(0, t) so that
(4.3) a- (0, t) - F(u(0, t), t) + ,8(0, t) a- (0, t) = 0. at ao As in ?2 we use an approximate Newton's method with the a-increments calculated from
%lU(O,t) [-at(0, t) + Y ' a-t-bS (0, t)n7(0, t)} [D(,)at at1 n-1
- F(u(0, t), t) - L aj(0, t)DF(u(0, t), t)n?(0, t) i=l
? p8(0, t) E ao {ai (0, t)n? (0, t)]= 0
and ,8(0, t) given by the component of F(u(0, t), t) - au (0, t) in DU(0, t), i.e.,
p8(0, t) T [F(u(0, t), t) - Lu(Q, t)]
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2352 GERALD MOORE
In ?5 we shall apply this approximate Newton's method to solve a discretised form of (4.2). Note that for n = 2 we may use n0(O, t) = ( 2 (0, t), aol (0, t)T) and n(O, t) =
(aU2 (9 t) aui1 (0, t))" Hence(4.2 Hence (4.2) is replaced by
au, Far auo ao (0, t) [ 1u2(0 t) ? a(0, t) ao (0, t) - F2(u(0, t), t)]
(4.4)
aU2 [-a auo - aoa2 (0, t) L U7 {u?(0, t) - a(0, t) ao2 (0, t) - F1 (u(0, t), t)] = 0
and we use the standard Newton's method to solve for a(0, t). Now to prevent our spatial parametrisation from breaking down, we may repair it at
each step. Thus for each value of t the closed curve u(0, t) in 9N' is reparametrised by normalised arclength; i.e. instead of the conformal coordinates used in ?2 we introduce a new parametrisation
v(a, t) = u(Ot(a), t),
where Ot is the inverse of the normalised arclength function At defined by
aoau (t ' t))
at() - ato(0) = 1.
Of course we can also write an explicit formula for At,
at (0) = rj(t) + L(t) ao(y t) y,
where
pl au d L(t) =] -l |o(y,t)| dy ao
is the length of the curve and the periodic r (t) is the so far unspecified origin. We determine the latter function by insisting that it minimise
11av ( ) .t .t 11 ~~~~~at (1
i.e., the coordinates for the different closed curves in 9N are forced to change smoothly with t, and then use v(o, t) as our new u(0, t). There is still one degree of freedom remaining, since (4.5) is unchanged by a constant shift in r. If desired, this can be removed by minimising
1 1 (4.6) jj IIu(0 + c, t) - uO(0, t) 11dO dt,
a phase condition analogous to that used for periodic orbits [18].
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2353
5. Numerical approximation and results for invariant curves. In this section we de- velop our discrete version of the algorithm in ?4. This is closely related to the numerical algorithm for tori in ?3.
The mapping u(O, t) represents our required "torus" and so to approximate it we place a grid over [0, 1]2; i.e.,
? = Oo < Oi < *-*< am'(l) = 1
O = to < tl < ... < tm (2) = 1.
Because of the periodicity, the points Om(i), tm(2) are identified with 00, to respectively. Hence we seek to compute an array of vectors in 9W2,
uij i = 1 ....m(1) j m(2)
which approximate u(0i, tj) and thus the Uij are regarded as gridpoint values of an approxi- mating piecewise bilinear function.
5.1. Parametrisation from previous torus. As always we assume that we have knowl- edge of a nearby torus in the form
U?; i=0,... m(l) j = , m(2)
and write
n-1 (5.1) Uij = Ui + kijNkij,
k=1
where No11 k = 1, n - 1 is an orthonormal basis for the orthogonal complement of
1+1] j +(6+i U? -U?,1 l(Oi _ Oi_1)u+S- i + (Oi+l _ (}i).i - i,,
Oi+1 -i Oi- -i-i
Thus we are using the tangent space at each gridpoint and the bases can be made smooth as in ?3.
Nowwewishtocompute Ckij, k 1,...,n - 1, i = 1.m ,j = 1(.lm(2), and thus we insist that (4.2) holds at the centre of each rectangle; i.e.,
1 Ui,j+l--Uij + Ui+l,j+l -Ui+l,j A (5.2) PD (U+,+ 2(tj+1-t1) F(Ui+j+,ttj1)} =0,
where tj+ = tJ+t+l Ui+j+ _ {Uij + Ui+,1 ? + Ui,j+l + Ui+,j+l} and DUi+j+ is the subspace spanned by
_ Ui+,j - Uij + Ui+i,j+i - Ui,j+i {Dh (Uij) } j -2(04+l - Oj)I We apply a similar approximate Newton's method to that in ?3, and thus the a-increments are calculated from
(5.3) PD, [A6 aij + A1U6oij+ij + A?16ai ?j+ + AJJ6ai+,}j - c11] = 0,
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2354 GERALD MOORE
where a ij (S a ij, 1. 8 . -a i, )T etc.,
cij F(Ui+j+g tj+) - Ui,i+1 - Uii + Ui+l,j+l - Ui+l,i j D F( j+~ t~~ 2(t1j+ tj)- z+DhU)
[Dh (Uij)]T [F(Ui+j+, tj+ U? i+ -Ui,+Ui+l,i+l-U?+1J
Ai+j+
2 2T
+ t
[Dh (Uij ) ] T[Dh (Uij )]
and the Aij are n x (n - 1) matrices whose kth columns are
A?? - k
-I DF(Ui+j+, tj+ 1 )N0jj + Nj+j+ k0i 'I 2(t}+1 - tj) 4 k ' '2(0i+l - Oj)
A j+2 )1k,i+l,j + 1-+j+ )
A0'1 - k - +l -DF(Ui+j+, t+.)N,,+1 ?ijl
Al}l - ki +lj+l - DF(ui+1+, t +)Noki+l+,j+1 i
(jl- tj) 4 220+ j
By choosing w = z - sign(z)II zIIen, where z _U+l,-u,+u,+l,+l-ui,+l the Householder 2(0i?1-0,)
reflection H(w) has the property that the first n - 1 components of H(w)v for any v E Jtn constitute PD1 I v while the last component constitutes PDU,++ v. Hence if we operate on the columns of the n x (n - 1) matrices A00, etc., with H(w) and then omit the final row, we will ii obtain (n - 1) x (n - 1) matrices Al.9 etc., and equation (5.3) can be written
(5.4) At.?x00( ?ij + A^1?6ai5,jj + A?165a1j,j+j + All65ai+l,j+l = Cij.
Thus combining equations (5.4) for all i, j will form the sparse system
A6a = c,
in which c and 6az have size (n - 1)m()m (2) and A is block bidiagonal with block bidiagonal blocks. The (n - 1) x (n - 1) blocks of the latter being the matrices A above.
For n = 2 we may simply discretise (4.4). Hence, using the notation U and V for the two components of U, we have
Dh ) [Vi,+l - Vij + Vi+l,j+ i - _F ((Ui++, V +) j+,j ]
2(jl- t1)
) [Uij+i - Uii + Ui+lj+i+i - j _ F ((U,+j+, Vi+j+), tj+2)] 2(jl- t1)
where
V1 _uij ? ja j1N1j
VijV-0I + (Yij Ni?
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2355
Our natural notation here is
V. V0 V0- Vo0 Mi-A Oi(0 - Oi -1) i Vj + (00+ 0 ) 1J i-i,j
0i+1 - oi - oi-1
U0P - up.u0- N? (0O - Oi-1) 1'+j j + (0i+1 - Oi) i-l
Dh (U11) _ -Ui+l,j Ui ? Ui+l,1+i - Ui,j+i Dh (Uij) ~2(0i+l - 0j)
Vi+l,j -Vi + Vi+i,}+ -Vij+ Dh (Vij) 2(0i+l - 0j)
and
Ui+j+ _ U4 (Ui-U+ ? U,+-Ui+l,j+l)-
Vi+j+ _4(Vij - V+, Vi,j+l -Vi+l,j+l).
This set of m(l)m(2) equations in the m(l)m(2) unknowns aij may be solved by the standard Newton's method.
5.2. Arclength representation. Now having computed our required torus, with a para- metrisation based on a nearby torus, we update the parametrisation to an approximation of normalised arclength for the closed curve in tn at each time-step. Thus for each tj, we let cj (0) denote the periodic cubic spline curve with knots at 00, ... . Om () which takes the values Uoj, ... Um(1),j at the knots, and we also let qj(0) be the periodic quadratic spline, based on the same knot sequence, which takes the values l U,-l 11 at the midpoints between successive knots. This enables us to define the periodic cubic splines
I 0S aj[O] -j + j qj(y)d y,
Ljo
where
1
Lj_ qj(0)d ,
which are close to normalised arclength for the curves cj. Now we wish to choose rj, I =
1 ...,m (2) so that the coordinates minimise the distance between neighbouring curves; i.e.,
m (2) 1lIvo)-v()1 (5.5) min Il / a - '
_,U)1 d -, n11...,nm(2) Jo (tj- tj_)2
where
vj(a) cj(Oj[ff)
and Oj[.] is the inverse of aj[.], is the discrete analogue of (4.5). This aim can be achieved in various ways, by different approximations of the integrals in (5.5) and different iterative
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2356 GERALD MOORE
methods. The approach we have preferred, and which has worked well in practice, is to apply a form of nonlinear Gauss-Seidel to (5.5), i.e., for each tj we minimise
[1 llVj(af) _Vj_ I(af) 12 + llVj+, (af) _Vj(U)112d
v(tj - tj_()2 (tj+l - tj)2
with respect to rj. This minimum is achieved when
[j j(a) Vj 1(a)] T_j(a) _[vVj (or)(o) j(a)]T d = )d j1 [v1@x) (tj - tj_ )2 (tj+l - tj)2
To approximate the integral we change the variable back to 0, through a -<- a [0], and then use the trapezoidal rule to obtain (5.6)
m() t -ofi (Uij-C c1(0j}i[o}[0i]]) c1+1(01+1[oj[Oi]]) - Uj jtT dc 0
i==1 -2t_1)2 (jl- tj)2 } d0O'
Since rj only appears in this equation through a. [.],
Oi1 r
i- 1 d_j_j dc TdcJ+1( ml e) -i X2 I d [or [0i (0,)T 0+ (0j+1 [oj [0 ]]) 2 (t, ,j 2 dau[Oj[ i]] dO dO
1 d0j-1 a[O 1 dcj 0) T dcj-1 (O 1 a O l (tj - tj1 )2 du- dO dO
and so we can easily apply Newton's method to (5.6). Note that the minimum in (5.5) is unchanged by a constant shift in r1, M . (2) and so, if desired, this can be used to keep U in phase with U?, cf. (4.6).
Having determined functions aj [0], j = 1, . . ., m(2), defining our new parametrisation, we may choose a new spatial grid
0 = ao < a1 < ... < am(1)=
and set
Uij = cj(01[ai]) i = 1. , m(1) j 1 m(2)
[If required a new temporal grid may also be introduced.] Note that we have used smooth interpolation by cubic splines because linearisation and
the application of Newton's method were desired. A very close approximation to normalised arclength coordinates, however, is hardly worthwhile, and so we are content with the trape- zoidal rule. It should be borne in mind, of course, that solving (5.6) does not minimise (5.5) exactly with respect to rj.
5.3. Forced van der Pol equation. As a numerical example we consider the forced van der Pol equation [11],
z23 11 =U2 - a 3 - Ui
U=- Ul +? cos ct,
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

INVARIANT CURVES AND TORI 2357
U1
~~~~~ 2
4l t
FIG. 8.
for which computational results are also given in [4-8, 22, 23]. The parameter co is always kept fixed at %/. and so Tf = For the unforced system (,6 =0), the linear problem (a = 0) has concentric circular periodic solutions of arbitrary radius, and there is a super- critical bifurcation from this "trivial" solution curve at L = 47r, L denoting the length of the periodic solutions. We used the methods of [18] to follow this bifurcating curve of unforced periodic solutions until ex = .4. The parameter ot was then kept fixed, the forcing parameter fi incremented in steps of .1, and the method of this section used to compute the resulting invariant curves. Of course for f = 0 we start off with a "degenerate" torus of periodic solutions. The torus for a = .4, fi = .4 is shown in Figure 8.
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions

2358 GERALD MOORE
REFERENCES
[1] D. G. ARONSEN, E. J. DOEDEL, AND H. G. OTHMER, An analytical and numerical study of the bifurcations in a system of linearly coupled oscillators, Phys. D, 25 (1987), pp. 20-104.
[2] G. BADER AND P. KUNKEL, Continuation and collocation for parameter-dependent boundary value problems, SIAM J. Sci. Statist. Comput., 10 (1989), pp. 72-88.
[3] H. COHN, Conformal Mapping on Riemann Surfaces, Dover, New York, 1980. [4] L. DIECI, J. LORENZ, AND R. D. RUSSELL, Numerical calculation of invariant tori, SIAM J. Sci. Statist. Comput.,
12 (1991), pp. 607-647. [5] L. DIECI AND G. BADER, Solution of the systems associated to invariant tori approximation. I: Block iterations
and compactification for periodic block dominant systems associated to invariant tori approximations, Appl. Numer. Math., 17 (1995), pp. 275-291.
[6] , Solution of the systems associated to invariant tori approximation. II: Multigrid methods, SIAM J. Sci. Statist. Comput., 15 (1994), pp. 1375-1408.
[7] L. DIECI AND J. LORENZ, Block M-matrices and computation of invariant tori, SIAM J. Sci. Statist. Comput., 13 (1992), pp. 885-903.
[8] , Computation of invariant tori by the method of characteristics, SIAM J. Numer. Anal., 32 (1995), pp. 1436-1474.
[9] N. FENICHEL, Persistence and smoothness of invariant manifolds forflows, Indiana Univ. Math. J., 21(1971), pp. 193-226.
[10] G. H. GOLUB AND C. F. VAN LOAN, Matrix Computations, The Johns Hopkins University Press, Baltimore, MD, 1989.
[11] J. GUCKENHEIMER AND P. H. HOLMES, Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, Applied Mathematical Sciences Vol. 42, Springer-Verlag, Berlin, 1983.
[12] M. HIRSCH, C. PUGH, AND M. SHUB, InvariantManifolds, Springer Lecture Notes in Mathematics 583, Springer- Verlag, Berlin, 1977.
[13] G. A. JONES AND D. SINGERMAN, Complex Functions: An Algebraic and Geometric Viewpoint, Cambridge University Press, Cambridge, U.K., 1987.
[14] I. G. KEVREKIDIS, R. ARIS, L. D. SCHMIDT, AND S. PELIKAN, Numerical computations of invariant circles of maps, Phys. D, 16 (1985), pp. 243-251.
[15] W. F. LANGFORD, Periodic and steady mode interactions lead to tori, SIAM J. Appl. Math.,37(1979), pp.22-48. [16] , A review of interactions of Hopf and steady-state bifurcations, in Nonlinear Dynamics and Turbulence,
G. I. Barenblatt, G. Ioos, and D. D. Joseph, eds., Pitman, Boston, MA, 1983, pp. 215-337. [17] M. A. LAVRENT'EV, Variational Methods: For Boundary Value Problems for Systems of Elliptic Equations,
Noordhoff, Groningen, The Netherlands, 1963. [18] G. MooRE, Computation and parametrisation of periodic and connecting orbits, IMA J. Numer. Anal.,
15 (1995), pp. 245-263. [19] H. RENELT, Elliptic Systems and Quasi-Conformal Mappings, Wiley, Leipzig, 1988. [20] R. SACKER, A perturbation theorem for invariant manifolds and Holder continuity, J. Math. Mech., 18 (1969),
pp. 705-762. [21] G. W. STEWART AND J. SuN, Matrix Perturbation Theory, Academic Press, New York, 1990. [22] M. VAN VELDHUIZEN, A new algorithm for the numerical approximation of an invariant curve, SIAM J. Sci.
Statist. Comput., 8 (1987), pp. 951-962. [23] , Convergence results for invariant curve algorithms, Math. Comp., 51 (1988), pp. 677-697. [24] J. WEISEL, Numerische ermittlung quasikonformerabbildungen mitfiniten elementen, Numer. Math.,35(1980),
pp. 201-222.
This content downloaded from 62.122.78.18 on Sat, 14 Jun 2014 00:00:42 AMAll use subject to JSTOR Terms and Conditions