Embed Size (px)
Citation preview

Comparison of Variance Estimators for Two-dimensional, Spatially-structured
Sample Designs.
Don L. Stevens, Jr.
Susan F. Hornsby*
Department of Statistics
Oregon State University

The research described in this presentation has been funded by the U.S. Environmental Protection
Agency through the STAR Cooperative Agreement CR82-9096-01 Program on Designs and Models
for Aquatic Resource Surveys at Oregon State University. It has not been subjected to the Agency's
review and therefore does not necessarily reflect the views of the Agency, and no official endorsement
should be inferred
R82-9096-01

Preview
• Widely accepted that a more or less regular pattern of points (e.g., systematic sampling) is more efficient than SRS
• A variety of variance estimators for estimated mean are available for 1-dimensional systematic sampling
• We will examine the behavior of some variance estimators for 2-dimensional systematic and spatially-balanced (not necessarily regular) designs

Variance Estimators
• Wolter (1985) identified eight 1-dimensional variance estimators for 1-dimensional systematic sampling
• D’Orazio (2003) extended three of these to 2-dimensional systematic sampling
• Stevens & Olsen (2003) developed an estimator for 2-dimensional spatially-balanced samples

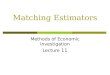
Simulation Study
• D’Orazio used simulation to compare estimators on a lattice generated from a Gaussian random field using several covariance functions– 32 x 32 lattice– Calculated variance estimator for all 16
possible 8 x 8 samples– Generated the random field using the Gaussian
Random Field package in R

0 5 10 15 20 25 30
05
10
15
20
25
30
xg
yg

0 5 10 15 20 25 30
05
10
15
20
25
30
xg
yg

Simulation Study
• Replicate D’Orazio’s study for the exponential covariance model, with the addition of the NBH estimator
• Check the behavior of the estimators on a spatially-patterned surface that is not stationary.

Variance Estimators
• Simplest approach: assume SRS:
n
sfpcVSRS
2
ˆ
N
nNfpc

Variance Estimators
• Horizontal stratification
0 5 10 15 20 25 30
05
10
15
20
25
30
2/
1
21222)(
1)(ˆ
n
jjjhs yy
nfpcV

Variance Estimators
• Vertical stratification
0 5 10 15 20 25 30
05
10
15
20
25
30
2/
1
21222)(
1)(ˆ
n
jjjvs yy
nfpcV

Variance Estimators
• 1st Order autocorrelation correction– 1-dimension
, the Durbin-
Watson
statistic
SRSw
ac VD
V ˆ2
ˆ
n
jj
n
jjj
w
yy
yy
D
1
2
1
1
21
)(
)(
1
1
21 )(
)1(2
1)(ˆ
n
jjjac yy
nnfpcV

Variance Estimators• 1st Order autocorrelation correction
– 2-dimension
, Geary’s c index of
spatial autocorrelation
1 if and are neighbors
0, otherwise
j k
jk
y y
2
1
1
2
2
)(
s
yy
cn
j
n
jkjk
n
j
n
jkjkkj
g
SRSgac VcV ˆˆ

Variance Estimators
• Cochran’s Autocorrelation Correction– 1-dimension
ˆ ˆcac SRSV wV
otherwise
ρw
,1
0ˆ ),1ˆ/1/(2)ˆln(/21
1 lagat ation autocorrel estimates

Variance Estimators
• Cochran’s Autocorrelation Correction– 2-dimension
– Use Moran’s I in place of in formula for w
ˆ ˆcac SRSV wV
1
1
( )( )
ˆ( 1)
n n
j k jkj k j
n n
jk SRSj k j
n y y y y
I
n V

Stevens & Olsen NeighborhoodEstimator
• General form for variable probability, continuous population
2
2
1
1ˆ1 i i
j kNBH ij ik
n i j D k Dj k
i
y yV w w
Di is the set of neighbors for point i

Stevens & Olsen NeighborhoodEstimator
Weights are chosen so that
Weights are a decreasing function of distance, and vanish outside of local neighborhood
1 1
1n n
ij iji j
w w
and wij =0 for jDi

Stevens & Olsen NeighborhoodEstimator
• For constant probability, finite population
2
2
1ˆ ( )i i
NBH ij j ik ki j D k D
V fpc w y w yn

0 5 10 15 20 25 30
05
10
15
20
25
30
xg
yg

grf.sim[, , i] Y
Z
grf.sim[, , i] Y
Z
grf.sim[, , i] Y
Z
grf.sim[, , i] Y
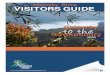
ZGaussian Random Fields

X
YZ
X + Y

X
YZ
N(0.25,0.075) * N(0.25,0.1)

X
Y
xy[,1]^2 + xy[,2]^2 -xy[,1] -xy[,2] +.1* cos(20*xy[,1]) + 0.1*sin(15*xy[,2]) +1.5

z.ptch32.ary[, , i]
Y
Z
z.ptch32.ary[, , i]
Y
Z
z.ptch32.ary[, , i]
Y
Z
z.ptch32.ary[, , i]
Y
ZPatchy Surfaces

Result GRF cv=1-exp(-2x)
Mean Bias 95% Coverage
VSRS 0.011834 0.00801 0.99943
Vsh 0.005722 0.00190 0.97706
Vsv 0.005728 0.00190 0.978625
Vac 0.005709 0.00189 0.982000
Vcac 0.001436 -0.0023 0.788187
VNBH 0.004949 0.00113 0.973062

Result GRF cv=1-exp(-0.5x)
Mean Bias 95% Coverage
VSRS 0.01448 0.00693 0.99356
Vsh 0.01275 0.00521 0.98719
Vsv 0.01270 0.00515 0.98731
Vac 0.01270 0.00515 0.98881
Vcac 0.00626 -0.0013 0.89950
VNBH 0.00992 0.00238 0.97681

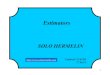
0.0 0.5 1.0 1.5 2.0
0.85
0.90
0.95
1.00
CV Parameter
Cov
erag
e
srs
shsv
ac
cac
nbh

Results Patchy Surface
Mean Bias 95% Coverage
VSRS 0.00087 0.00058 0.99950
Vsh 0.00040 0.00011 0.95796
Vsv 0.00032 0.00002 0.93487
Vac 0.00036 0.00006 0.96290
Vcac 0.00009 -0.0002 0.74199
VNBH 0.00033 0.00003 0.95408

Conclusions
• The hs, vs, ac, and nbh estimators all seem to work reasonably well for both the GRF and patchy surfaces
• The nbh estimator seems to give coverages that are a bit closer to nominal than the hs, vs, or ac estimators
• The nbh works for variable probability, spatially constrained designs for which the other estimators do not.