Embed Size (px)
Citation preview

Comparison of Digital Control Loops Analytical Models, Laboratory
Measurements, and Simulation Results
Phil CookeRohan SamsiTom Wilson20 October 2009

Page 2 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Outline
Application Circuit & IC Block Diagram
Control Loop Model, Design, and Analysis
PID Design – Analytical Design Procedure
Simulation & Experimental Circuit Schematics
Time-Domain Simulation Model vs. Experimental Results
Frequency Domain Comparison
Summary

Page 3 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Application Circuit
MOSFETGate DriverPX3511 or PX3515
Optional I2C/PMBusCompatible Connection
MinimalExternal PassiveComponents
Voltage and CurrentSensing Networks
ProgrammableFaults
Input Voltage Decoupling
Set Frequency and Output Voltage
SlaveAddress

Page 4 20 October 2009 IBM Power and Cooling Technology Symposium 2009
IC Block Diagram
Internal“Brain”
“Controller”PIDPost FilterDPWM
PWMCommandtoMOSFETDriver
Internal“Memory”
VoltageFeedbackPath
CurrentFeedbackPath
Input & Output OVP, UVPPeak, Average, Current LimitInternal/Ext. Temp. Alert/Shutdown
TrimmedRef. & Oscillator
Mux. toFeed inVoltage,Current,& Temp.
To SyncConverters
EnableOutputs

Page 5 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Control Loop Model: Mostly Small-Signal
Transfer functionsin Continuous “s” orDiscrete “z” frequencydomains
Lumped Total DelayCan include delayfrom DPWM block
FeedbackGain1, 1/2, 1/3
OutputImpedanceTransferFunction
Line-to-OutputTransferFunction
Control-to-OutputPowerConverterAveragedModel

Page 6 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Control Loop Design – What Do We Want To Do
Loop Gain
Control-to-Output
Controller
Phase Boost
-180º
CrossoverFrequency

Page 7 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Control Loop Design – What Do We Want To Do
Control-to-Output
Controller
Phase Boost
-180º
CrossoverFrequency
and Gain Adjust
Loop Gain

Page 8 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Analysis: Small-Signal Equations
GC z =A az 2+bz+cz2−1+K FD z+K FD
=A [K I⋅1
1−z−1K P+K D⋅1−z
−1 ⋅ 11−K FD z
−1 ]
GZ1 z =n1 z+n0
z2+d 1 z+d 0H
Total Discrete Plantand FeedbackThese values(n
1, n
0, d
1, d
1, H)
are known
Discrete Controller
20log ∣GC zC GZ1 zC ∣=0 or ∣GC zC GZ1 zC ∣=1Solution:Solve at Crossover
∣T z ∣=∣GC z GZ1 z ∣Loop Gain

Page 9 20 October 2009 IBM Power and Cooling Technology Symposium 2009
PID Design – Analytical Design Procedure
1. Select desired analog crossover frequency fC, this is the loop bandwidth,
and calculate system resonance fO
from the power converter reactive
components
2. Set the “analog” post filter pole, fPA2
, to 3·fC, and find K
FD
A reasonable starting range is from fPA2
= fC/2 to 3·f
C
KFD
is one of the following {0.125, 0.25, 0.375, 0.50, 0.625, 0.75, 0.875, 1.00} for the PX7510D
3. Start with fX = 0.85·f
O and Q
X = 0.7 for the controller zeroes and find the
required loop-gain (i.e., find α) to have T(z) crossover at fC
fX should be equal to or less (for design margin) than f
O, but not too low
4. Find α from: GZ1 z =n1 z+n0
z2+d 1 z+d 0H α=
∣n1 zC+n0∣
∣zC2 +d 1 zC+d0∣
HUsing

Page 10 20 October 2009 IBM Power and Cooling Technology Symposium 2009
PID Design – Analytical Design Procedure
Where GZ1
is the total discrete plant and feedback gain
5. From the discrete controller transfer function, find β
6. Using pole-zero mapping (z=esT), along with the discrete crossover zC,
find γ
7. Solve for r using fX and Q
X in:
GC z =Aaz 2+bz+c
z2−1+K FD z+K FDβ=∣zC
2−1+K FD zC+K FD∣
z=es⋅T S zC=e
− jwC⋅T S wC=2πf C
1+s /Q X w X s /wX 2
z−zZN1 z−z ZN2
analog digital Find γ
Find β
r=e−π⋅f X⋅T S
/QX
maps toγ=∣zC−z ZN1∣.∣zC−z ZN2∣

Page 11 20 October 2009 IBM Power and Cooling Technology Symposium 2009
PID Design – Analytical Design Procedure
8. Finally the a, b, and c controller terms are:
9. Alternatively, the KP, K
I, and K
D terms are:
a=β
α⋅γ⋅A
b=−2⋅a⋅r⋅cos [2⋅π⋅f X⋅T S⋅1−1/ 2⋅QX 2]
c=a⋅r2
K D=c
K I=a+b+K D
1−K FD
K P=a−K I−K D

Page 12 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Time-Domain Simulation Model
PX7510D IC Controller Model
SIMPLIS Simulation Circuit & IC Model
PX3511D Gate Driver
PowerConverter

Page 13 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Experiment Circuit Schematic
Integrated Driver and MOSFETs (PX4660)
Latest PX7510D Controller

Page 14 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Time-Domain Simulation vs. Experimental Results
5 A to 10 A Load Step
Imported Scope Data
SIMPLIS Simulation Model

Page 15 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Time-Domain Simulation vs. Experimental Results
10 A to 5 A Load Step
Imported Scope Data
SIMPLIS Simulation Model

Page 16 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Time-Domain Simulation vs. Experimental Results
5 A to 20 A Load Step
Imported Scope Data
SIMPLIS Simulation Model

Page 17 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Time-Domain Simulation vs. Experimental Results
20 A to 5 A Load Step
Imported Scope Data
SIMPLIS Simulation Model

Page 18 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Experiment Results: Time-Domain
5 A to 10 A Load Step 10 A to 5 A Load Step
Actual Scope PlotsAll data was extracted to .csv file for comparison

Page 19 20 October 2009 IBM Power and Cooling Technology Symposium 2009
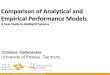
Frequency-Domain Comparison: Original Design
fsw is theSwitchingFrequency
The MatLab modelshown here usesa more accuratedigital loop model

Page 20 20 October 2009 IBM Power and Cooling Technology Symposium 2009
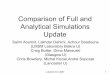
Frequency-Domain Comparison: Original Design
The MatLab modelshown here usesa simplifieddigital loop model
Both the gainand phase areless accurate atthe higherfrequencies

Page 21 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Frequency-Domain Comparison: Design Procedure
This is a moreaggressive design
More phase boostthroughout, highercrossover achievable
The MatLab modelshown here usesa more accuratedigital loop model

Page 22 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Summary
Understanding Digital Control systems requires control loop models - The behavior can be better appreciated by analytical analysis aided with computer simulation tools in the time and frequency domain to gain further insight

Page 23 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Summary
Understanding Digital Control systems requires control loop models - The behavior can be better appreciated by analytical analysis aided with computer simulation tools in the time and frequency domain to gain further insight
Models for a typical digital PID voltage mode controller was provided

Page 24 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Summary
Understanding Digital Control systems requires control loop models - The behavior can be better appreciated by analytical analysis aided with computer simulation tools in the time and frequency domain to gain further insight
Models for a typical digital PID voltage mode controller was provided
A digital design procedure starting from analog frequency domain specifications was given using these models to calculate the controller PID coefficients

Page 25 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Summary
Understanding Digital Control systems requires control loop models - The behavior can be better appreciated by analytical analysis aided with computer simulation tools in the time and frequency domain to gain further insight
Models for a typical digital PID voltage mode controller was provided
A digital design procedure starting from analog frequency domain specifications was given using these models to calculate the controller PID coefficients
Comparison of the time and frequency data was made between the models and simulation results to the real experimental data, simulation tools can further the accuracy of the validation before designs are released to production

Page 26 20 October 2009 IBM Power and Cooling Technology Symposium 2009
Summary
Understanding Digital Control systems requires control loop models - The behavior can be better appreciated by analytical analysis aided with computer simulation tools in the time and frequency domain to gain further insight
Models for a typical digital PID voltage mode controller was provided
A digital design procedure starting from analog frequency domain specifications was given using these models to calculate the controller PID coefficients
Comparison of the time and frequency data was made between the models and simulation results to the real experimental data, simulation tools can further the accuracy of the validation before designs are released to production
This represents a digital design example where all of the results are compared – this provides confidence that these systems are understood and designs can be robust using these approaches