Embed Size (px)
Citation preview

Proceedings of the ASME 2015 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference
IDETC/CIE 2015 August 2-5, 2015, Boston, Massachusetts, USA
DETC2015-46755
COMBINATORIAL METHOD FOR CHARACTERIZING SINGULAR CONFIGURATIONS IN PARALLEL MECHANISMS
Avshalom Sheffer School of Mechanical Engineering
Tel Aviv University, Ramat Aviv 69978, Israel
Offer Shai School of Mechanical Engineering,
Tel Aviv University, Ramat Aviv 69978, Israel
ABSTRACT The paper presents a method for finding the different
singular configurations of several types of parallel
mechanisms/robots using the combinatorial method. The main
topics of the combinatorial method being used are:
equimomental line/screw, self-stresses, Dual Kennedy theorem
and circle, and various types of 2D and 3D Assur Graphs such
as: triad, tetrad and double triad. The paper introduces
combinatorial characterization of 3/6 SP and compares it to
singularity analysis of 3/6 SP using Grassmann Line Geometry
and Grassmann-Cayley Algebra. Finally, the proposed method
is applied for characterizing the singular configurations of
more complex parallel mechanisms such as 3D tetrad and 3D
double-triad.
KEYWORDS: Combinatorial method, Equimomental
Line/Screw, Dual Kennedy theorem and circle, Grassmann
Line Geometry and Grassmann-Cayley Algebra, Self-Stress,
Singularity, 3/6 SP
NOMENCLATURE DOF/ 𝛿 Degrees Of Freedom
eqml Equimomental Line
eqms Equimomental Screw
𝑃𝑖 Planar pencil formed by the two leg
lines meeting at 𝐵𝑖
SP Stewart Platform
SS Self-stress
SSt Topological Self-stress
SSg Geometric Self-Stress
2D Two-dimensional
3D Three-dimensional
3/6 SP 3/6 Stewart Platform
1. INTRODUCTION In this paper we present a new combinatorial method for
characterizing singular configurations in parallel mechanisms,
with an emphasis on the six-DOF 3/6 Stewart Platform, called
for short 3/6 SP. The Stewart Platform consists of two bodies
connected by six legs, which can vary their lengths. One of the
bodies is called the base and the other is called the platform.
One of the important problems in parallel robot kinematics is
the characterization of singular or special configurationsI. It is
one of the main concerns in the analysis and design of
manipulators [1]. One of the known singular configurations of
the Stewart Platform is when all the lines meet one line [2]. An
additional configuration is when the moving platform rotates
by around the vertical axis [3]. Merlet [4] classified all
the different singular configurations of 3/6-SP by using
Grassmann geometry. Analysis of wrench singularities was
introduced by using tetrahedrons [5], a figure of four planes,
to identify wrench singularities, i.e. configurations where the
platform can move infinitesimally when all its actuators are
locked. A tetrahedron is non-singular if and only if its four
faces do not have a common point. It has been proven that the
manipulator is at a wrench singularity if and only if the
characteristic tetrahedron is singular. Another method relying
this time on Grassmann–Cayley algebra and the associated
superbracket decomposition introduces the conditions when
the Jacobian (or rigidity matrix) containing these screws is
rank-deficient [6]. The singularity condition of a broad class of
six-DOF three-legged parallel robots that have one spherical
joint somewhere along each leg becomes a check whether the
four planes intersect at a point. Another characterization based
on the kinematical relationship of rigid bodies is that these
I The term “singularity” originates from mathematics and the
term “special configuration” originates from mechanical engineering.
In this paper we chose to adopt and use the term “singularity”.

2 Copyright © 2015 by ASME
four planes include three normal planes of three velocities of
three non-collinear points in the end effector, and the plane is
determined by these three points themselves [7,8,9,10]. When
all the links of 3/6-SP are locked, the three normal planes of
three possible velocities of the platform are the planes created
by the links of the mechanism. Thus, it is possible to
determine the singularity of 3/6-SP and other mechanisms
with a triangle-moving platform. This approach is consistent
with the approach proposed in this paper except that this paper
focuses on statics while in these papers they focus on
kinematics.
In section two we provide a brief explanation of the
combinatorial method used in this paper by introducing the
equimomental lines (eqml) and self-stresses (SS) and how
they are used for characterizing the singular configurations.
The dual Kennedy Theorem is provided and the technique of
drawing the dual Kennedy circle is used for finding all the
eqml. In section three and four we apply the combinatorial
method for finding the singular conditions of 3/6 SP and
compare it to other singular characterization methods. Section
five introduces the applicability of the proposed method, the
combinatorial method, for characterizing the singularity of
more complex parallel mechanisms such as tetrad and double
triad, in part by using equimomental screws.
2. THE COMBINATORIAL METHOD The combinatorial method is founded on discrete
mathematics, in particular on graph theory and rigidity theory.
In this paper this method is applied to characterize the singular
configurations of parallel mechanisms. The main advantage of
the proposed method is that it is also applicable to other types
of parallel mechanisms and not limited to SPs. This section
introduces two concepts underlying the combinatorial method
that are used in this paper: self-stress and the equimomental
line.
2.1 SELF-STRESS Self-Stress is a special feature indicating the existence of
redundant constraints. A self-stress is constructed when there
is a need to insert a rigid body between two joints/vertices
whose distance is constant.
Definition of a self-stress: A set of internal forces in the links
that are dependent on one parameter and satisfy the
equilibrium of forces around each joint.
From this definition it follows that if a mechanism possesses a
self-stress and has joints with degree equal to the dimension d
it should satisfy the following property.
Property 1: If there is a self-stress in all the links incident to a
joint and the degree of the joint (the number of links incident
to a joint) is d in dimension d then all the d links should be
collinear or coplanar in dimension d=2 or d=3, respectively.
The reason for the latter is that these are the only geometries
that can have a self-stress.
From Property 1 it also follows that for any 3D system, when
all the links incident to a joint are not coplanar but have a self-
stress then the degree of the joint is at least four. Similarly, a
singularity condition exists if and only if four faces have a
common point [11].
There are two types of self-stresses: topological and
geometric, designated by SSt and SSg respectively. The
topological self-stresses exist for almost any realization of the
mechanism. On the other hand, the geometric self-stress exists
only at a specific realization, usually the singular
configuration. Thus in this paper only the latter self-stress, the
geometric, is used. These realizations are also called over-
constrained mechanisms [12]. There are several known
geometric constraints that cause the appearance of geometric
self-stresses in 2D mechanisms, such as when three links or
their continuations are constrained to meet at a point, or when
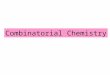
three points should be collinear. For example, the 2D triad
shown in Figure 1 (a) has a geometric SS, SSg, in all the links
if the continuations of the three ground links intersect at the
same point, but for any small changes in the realization there
is no self-stress. The 2D triad in Figure 1(b) is in a special
condition where the links {1,4,3} are collinear, thus only in
these three links there is an internal force, while in the other
links {2,5,6} there is a zero force.
(a) A geometric SS exists in
all the links
(b) A geometric SS exists only
in links, 1, 3 and 4
Figure 1. Examples of 2D triad in special realizations, singular
configurations, both having a geometric self-stress.
2.2 THE EQUIMOMENTAL LINE In kinematics, for every rigid body there exists a point in
the body or on its continuation with a zero velocity, referred to
as the absolute instant center [13]. Analogically, in statics, for
any force there exists a line upon which the moment exerted
by the force is equal to zero. This is the line is along which the
force acts and it is called the absolute equimomental line
(absolute eqml). Note, using the projective geometry duality a
point corresponds to a line, thus the absolute instant center is
dual to the absolute equimomental line. More details about
this duality relation appear in [14].
In kinematics we have in addition the relative instant center
𝐼𝑖,𝑗 : For any two bodies, i and j, there exists a point in the
plane where the velocities of the two bodies at this point is
equal. Relying on the projective geometry duality, for any two
forces there exists a line along which they exert the same
moment at each point on the line. This line is called the
relative equimomental line, or for short relative eqml.
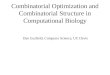
For example, the line 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼) is a line where the forces 𝐹𝐼
and 𝐹𝐼𝐼 exert the same moment, as shown in Figure 2. Note,

3 Copyright © 2015 by ASME
the eqml of the two forces should pass through the intersection
point of the two forces (the two absolute eqmls).
Figure 2. Forces ⃗⃗ and ⃗⃗ acting along lines of action
( , ) and ( , ).
Now we can transform the Arnohold-Kennedy into statics.
The Arnohold-Kennedy theorem [13] states that the relative
instant centers of any three links i, j and k of the mechanism,
𝐼𝑖𝑗 , 𝐼𝑖𝑘 and 𝐼𝑗𝑘, must lie on a straight line. Applying the duality
relation between the instant centers and the eqml, we derive
the following theorem in statics:
Theorem 1 – The dual Kennedy Theorem in statics [14]: For
any three forces: , and the three relative eqml:
( , ), ( , ) and ( , ) intersect at the same point.
Applying the duality from graph theory [15] it follows that the
absolute eqml is associated to each face, a circuit without
inner edges (called also contours). Each binary link (also
called bar) defines the relative eqml of the two absolute eqml
of the two faces adjacent to this bar [16]. If one of the two
faces next to a link is the ground face (also called reference
face) the absolute eqml of the second face is along this link.
Thus, all the links adjacent to the ground faces define the
absolute eqml, and can thus be called primary absolute eqml.
Following the terminology in mechanisms, the absolute eqml
that are determined by applying the dual Kennedy theorem are
called secondary eqml.
Now we are ready to define the main property that enables us
to determine the singular configuration.
Property 2: For any two adjacent faces if the relative eqml
passes through the meeting point of the two absolute eqml of
these two faces the mechanism is in a singular configuration.
For finding all the eqml in the mechanism we can use the
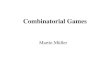
technique of drawing the dual Kennedy circle [14]. The
procedure to find the secondary eqml is done by drawing a
circle referred to as the dual Kennedy circle and denote the
faces of the mechanism in a clockwise manner on the
circumference of this circle, as shown in Figure 3. The
primary eqml are represented as solid lines and the secondary
eqml as dashed lines in this circle. Note that the dashed line
(𝐼, 𝐼𝐼𝐼) creates the two triangles (𝐼, 𝐼𝐼, 𝐼𝐼𝐼) and (𝐼, 𝐼𝑉, 𝐼𝐼𝐼) in
the quadrangle (𝐼, 𝐼𝐼, 𝐼𝐼𝐼, 𝐼𝑉), see Figure 3. Therefore, the
𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) must pass through the point of intersection of
𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼) and 𝑒𝑞𝑚𝑙(𝐼𝐼,𝐼𝐼𝐼), namely, between the links 1 and 2,
respectively, and through the point of intersection of 𝑒𝑞𝑚𝑙(𝐼,𝐼𝑉)
and 𝑒𝑞𝑚𝑙(𝐼𝑉,𝐼𝐼𝐼), namely, between the links 4 and 3,
respectively.
(a)
(b)
Figure 3. (a) Mechanism 4 links (b) The dual Kennedy circle
For sake of clarity we show how we use the eqml method for
characterizing the singularity condition of a 2D triad, given in
Figure 4 and 5.
After defining the four faces { , 𝐼, 𝐼𝐼, 𝐼𝐼𝐼} where the reference
face is designated by the number 0, the primary eqml are:
𝑒𝑞𝑚𝑙(𝐼,0) = 6
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) = 1
𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) = 5
Due to Property 2, The three eqml: ( , ), ( , ) and
( , ) intersect at a point thus the configuration is in a
singular configuration. The triad in Figure 4 is not in a
singular configuration since the lines 6,1 and 5 don’t intersect
at a point while in Figure 5 the three eqml satisfy property 2,
thus it is in a singular configuration.
Figure 4. Non-singular configuration.

4 Copyright © 2015 by ASME
Figure 5. Singular configuration.
In 3/6-SP in a singular configuration, when there is a self-
stress the platform rotates around a certain axis. In the next
section we introduce several singularity conditions of 3/6 SP.
For each condition we show the eqml defined by three
arbitrary coplanar forces that intersect at a unique point, the
number of zero edges, and the rotation axis of the platform
when there is an infinitesimal movement.
3. APPLYING THE COMBINATORIAL METHOD FOR FINDING THE SINGULARITY CONDITIONS OF 3/6 SP
Merlet [4] studied the singularity of six-DOF 3/6-SP
based on the Grassmann line geometry. He discovered many
new singularities, including 3C, 4B, 4D, 5A, and 5B. Due to
Property 2, we can find the singular configurations of many
types of mechanisms. Relying on the rank of the Jacobian
matrix of SP [17], we conclude that for a mechanism with rank
3, 4 and 5, we will have 2, 1 and 0 zero links, respectively. In
the following section, we will derive all the reported
singularities, this time by applying the combinatorial method
introduced in this paper.
We call 𝑃𝑖 the planar pencil formed by the two leg lines
meeting at 𝐵𝑖 and there are seven faces, but one of them will
be chosen to be the reference frame/face.
Figure 6. The 3/6 Stewart Platform in generic configuration
Bundle Singularity (3C): A singular bundle occurs when
four lines of the six legs intersect at a common point.
Figure 7. Definition of 3C singular configuration.
Let us choose four of the faces to be zero faces, as follows:
(
𝐹𝐼𝐹𝐼𝐼𝐹𝐼𝐼𝐼𝐹𝐼𝑉𝐹𝑉𝐹𝑉𝐼𝐹𝑉𝐼𝐼)
=
(
𝐹𝐼𝐹𝐼𝐼𝐹𝐼𝐼𝐼 )
Since links 3, 5, 7 and 8 are adjacent to zero faces, it follows
that they are absolute eqml. On the other hand, links 4, 6 and 9
are adjacent to two zero faces, i.e. on both of their two sides
there are zero faces, thus they are zero links.
Now that we have all the absolute eqml we can find the
relative eqml by applying Property 2 and the dual Kennedy
circle. The 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) must pass through the point of
intersection of 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼) and 𝑒𝑞𝑚𝑙(𝐼𝐼,𝐼𝐼𝐼), namely, between
links 1 and 2, respectively, and through the point of
intersection of 𝑒𝑞𝑚𝑙(𝐼,0) and 𝑒𝑞𝑚𝑙(0,𝐼𝐼𝐼), namely, between
links 8 and 7, respectively, as shown in Figure 8.
Figure 8. The dual Kennedy circle of a 3C configuration
𝑒𝑞𝑚𝑙(𝐼,0) = 5 = 8
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) = 3 = 7
𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) = (1 ∨ 2) ∧ (7 ∨ 8)
For this configuration, links 5 and 8 are on 𝑒𝑞𝑚𝑙(𝐼,0), links 3
and 7 are on 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) and 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) passes through the
meeting point of the links 1-3 and 5. It can be seen that the
four links 1-3 and 5 of the six links intersect at a common
point. Due to Property 2, the three eqml: 𝑒𝑞𝑚𝑙(𝐼,0), 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0)
and 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) intersect at one point, so self-stress occurs in
the links except on 4, 6 and 9 which are zero links, and the
configuration is singular, as shown in Figure 9 and Table 1.

5 Copyright © 2015 by ASME
Figure 9. 3C singular configuration with the eqml where faces
IV, V, VI, VII are zero faces.
Hyperbolic Congruence Singularity (4B): The condition
for this singularity occurs when five lines are concurrent with
two skew lines.
Figure 10. Definition of 4B singular configuration.
Let us choose two of the faces to be zero faces, as follows:
(
𝑽 𝑽 𝑽 𝑽 )
=
(
𝑽 𝑽 )
Since links 1 and 5 are adjacent to zero faces it follows that
they are the absolute eqml of (𝐼, ) and (𝐼𝑉, ), respectively .
On the other hand, link 6 is adjacent to two zero faces, i.e. on
both of its two sides there are zero faces, thus it is a zero link.
Now, that we have all the absolute eqml we can find the
relative eqml by applying Property 2 and dual Kennedy
circle, as follows:
𝑒𝑞𝑚𝑙(𝐼𝑉,0) = 5
𝑒𝑞𝑚𝑙(𝐼𝐼,0) = (1 ∨ 2) ∧ (7 ∨ 8)
𝑒𝑞𝑚𝑙(𝐼𝑉,𝐼𝐼) = (3 ∨ 4) ∧ (8 ∨ )
For this configuration, link 5 is on 𝑒𝑞𝑚𝑙(𝐼𝑉,0), 𝑒𝑞𝑚𝑙(𝐼𝐼,0) passes through the meeting point of links 1, 2, 7 and 8, and in
the same way, 𝑒𝑞𝑚𝑙(𝐼𝑉,𝐼𝐼) passes through the meeting point of
the links 3, 4, 8 and 9. The three links 5, 7 and 9 are coplanar,
due to Property 1 and since link 6 is a zero link. Due to
Property 2, the three eqml: 𝑒𝑞𝑚𝑙(𝐼𝑉,0), 𝑒𝑞𝑚𝑙(𝐼𝐼,0) and
𝑒𝑞𝑚𝑙(𝐼𝑉,𝐼𝐼) intersect at a point, so self-stress occurs in all the
links except for link 6. Thus, 3/6 SP satisfying the above
constraints is in a singular configuration, as shown in Figure
11 and Table 1.
Figure 11. 4B singular configuration with the eqml where
faces V, VI are zero faces.
Degenerate Congruence Singularity (4D): When five
lines are in one plane or pass through one common point in
that plane, they form a singular degenerate congruence.
Figure 12. Definition of 4D singular configuration.
Let us choose three of the faces to be zero faces, as follows:
(
𝐹𝐼𝐹𝐼𝐼𝐹𝐼𝐼𝐼𝐹𝐼𝑉𝐹𝑉𝐹𝑉𝐼𝐹𝑉𝐼𝐼)
=
(
𝐹𝐼𝐹𝐼𝐼𝐹𝐼𝐼𝐼𝐹𝐼𝑉 )
Since links 2, 5, 7 and 8 are adjacent to zero faces it follows
that they are absolute eqml. On the other hand, links 6 and 9
are adjacent to two zero faces, i.e. on both their two sides there
are zero faces, thus they are zero links.
Now, that we have all the absolute eqml we can find the
relative eqml by applying Property 2 and dual Kennedy circle,
as follows:
𝑒𝑞𝑚𝑙(𝐼,0) = 5 = 8
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) = (1 ∨ 2) ∧ (7 ∨ )
𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) = (3 ∨ 4) ∧ (7 ∨ 8)
For this configuration, links 5 and 8 are on 𝑒𝑞𝑚𝑙(𝐼,0),
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) passes through the meeting point of links 1, 2, 7
and 9, and in the same way, 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) passes through the
meeting point of links 3, 4, 7 and 8. The three links 1, 2 and 7
are coplanar, due to Property 1, because the other link (9)
incident to that joint is a zero link and the degree of the joint is
three. Links 3-5 pass through 𝑃1 to form a singular degenerate
congruence. In the same way, due to Property 2, the three
eqml: 𝑒𝑞𝑚𝑙(𝐼,0), 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) and 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) intersect at one
point, so self-stress occurs in the links except for links 6 and 9

6 Copyright © 2015 by ASME
that are zero links, and the configuration is singular, as shown
in Figure 13 and Table 1.
Figure 13. 4D singular configuration with the eqml where
faces V, VI, VII are zero faces.
General Complex Singularity (5A): This singularity is
characterized by having more than five skew lines.
Figure 14. Definition of 5A singular configuration.
Let us choose one of the faces to be zero faces, as follows:
(
𝐹𝐼𝐹𝐼𝐼𝐹𝐼𝐼𝐼𝐹𝐼𝑉𝐹𝑉𝐹𝑉𝐼𝐹𝑉𝐼𝐼)
=
(
𝐹𝐼𝐼𝐹𝐼𝐼𝐼𝐹𝐼𝑉𝐹𝑉𝐹𝑉𝐼𝐹𝑉𝐼𝐼)
Since links 1, 6 and 8 are adjacent to zero faces it follows that
they are absolute eqml.
Now, that we have all the absolute eqml we can find the
relative eqml by applying Property 2 and the dual Kennedy
circle, as follows:
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) = (1 ∨ 2) ∧ (7 ∨ 8)
𝑒𝑞𝑚𝑙(0,𝑉) = (5 ∨ 6) ∧ (8 ∨ )
𝑒𝑞𝑚𝑙(𝑉,𝐼𝐼𝐼) = (3 ∨ 4) ∧ (7 ∨ )
For this configuration, 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) passes through the meeting
point of links 1, 2, 7 and 8, 𝑒𝑞𝑚𝑙(0,𝑉) passes through the
meeting point of links 5, 6, 8 and 9, and 𝑒𝑞𝑚𝑙(𝑉,𝐼𝐼𝐼) passes
through the meeting point of links 3, 4, 7 and 9. It can be seen
in Figure 15 and Table 1, that the three eqml: 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0),
𝑒𝑞𝑚𝑙(0,𝑉) and 𝑒𝑞𝑚𝑙(𝑉,𝐼𝐼𝐼) intersect at one point, so based on
Property 2 this is a singularity configuration, as there is an
infinitesimal movement in all the joints along the vertical axis
of the platform.
Figure 15. 5A singular configuration with the eqml where face
I is a zero face.
Special Complex Singularity (5B): This type of
singularity occurs when six segments cross the same line.
Figure 16. Definition of 5B singular configuration.
Let us choose one of the faces to be zero faces, as follows:
(
𝐹𝐼𝐹𝐼𝐼𝐹𝐼𝐼𝐼𝐹𝐼𝑉𝐹𝑉𝐹𝑉𝐼𝐹𝑉𝐼𝐼)
=
(
𝐹𝐼𝐼𝐹𝐼𝐼𝐼𝐹𝐼𝑉𝐹𝑉𝐹𝑉𝐼𝐹𝑉𝐼𝐼)
Since links 1, 6 and 8 are adjacent to zero faces it follows that
they are absolute eqml.
Now, that we have all the absolute eqml we can find the
relative eqml by applying Property 2 and the dual Kennedy
circle, as follows:
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) = (1 ∨ 2) ∧ (7 ∨ 8)
𝑒𝑞𝑚𝑙(0,𝑉) = (5 ∨ 6) ∧ (8 ∨ )
𝑒𝑞𝑚𝑙(𝑉,𝐼𝐼𝐼) = (3 ∨ 4) ∧ (7 ∨ )
For this configuration, 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) passes through the meeting
point of links 1, 2, 7 and 8, 𝑒𝑞𝑚𝑙(0,𝑉) passes through the
meeting point of links 5, 6, 8 and 9, and 𝑒𝑞𝑚𝑙(𝑉,𝐼𝐼𝐼) passes
through the meeting point of links 3, 4, 7 and 9. The
intersection line between the planes containing 𝑃3 and 𝑃5
crosses through point 𝐵1. In this case, six segments cross this
line and there is an infinitesimal movement in all the joints
along this axis. In the same way, the three eqml: 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0),
𝑒𝑞𝑚𝑙(0,𝑉) and 𝑒𝑞𝑚𝑙(𝑉,𝐼𝐼𝐼) intersect at one point, so based on
Property 2 this is a singularity configuration, as shown in
Figure 17 and Table 1.

7 Copyright © 2015 by ASME
Figure 17. 5B singular configuration with the eqml where face
I is a zero face.
In the next section, we compare this method to other
singularity analysis methods listed in the literature.
4. COMPARISON TO OTHER SINGULARITY ANALYSIS METHODS In this section we review the characterization of all the
singular conditions of 3/6 SP according to the various methods
reported in the literature. We compare the method presented in
this paper to the method developed by Merlet [4] based on
Grassmann Line Geometry and to the method developed by
Shoham and Ben-Horin [6] based on Grassmann–Cayley
Algebra. Table 1 shows this comparison. As was mentioned in
section 3, the singular configurations of this structure
according to line geometry analysis include five types: 3C, 4B,
4D, 5A, and 5B.
Shoham and Ben-Horin proved that there is a class of (at least)
144 combinations that include 3/6 SP in which their
singularity condition is delineated to be the intersection of four
planes at one point. They showed that all the singular
configurations of Merlet are particular cases of this condition.
The geometric condition consists of four planes, defined by
the actuator lines and the position of the spherical joints,
which intersect at least at one point. Another point of view of
this singularity appears in [10] this time from kinematics. In
the latter paper they introduced a constraint between the three
velocities of the three joins connecting the legs to the platform
and the plane of the platform.
Bundle Singularity (3C): A singular bundle occurs when
four lines of the six legs intersect at a common point. Table 1
shows this singularity configuration. This occurs when 𝐵1𝐵3
and 𝐴3𝐵3 and also 𝐵1𝐵5 and 𝐴5𝐵5 links lie on the same line. It
is clear that this condition fulfills the four-intersecting-planes
singularity condition, whereby the planes, defined by the
actuator lines and the position of the spherical joints, intersect
at point 𝐵1. In the same way, the three eqml: 𝑒𝑞𝑚𝑙(𝐼,0),
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) and 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) intersect at one point and the
configuration is singular, due to Property 2.
Hyperbolic Congruence Singularity (4B): The condition
for this singularity occurs when five lines are concurrent with
two skew lines. Table 1 shows this singularity configuration. A
singular configuration of this type is when 𝐷1 transversal
𝐵1𝐵3 and 𝐷2 is the intersection line between the planes
containing 𝑃1 and 𝑃3. Arrange 𝑃5 so that one of the leg lines
(5) intersects both 𝐷1 and 𝐷2, 𝐵5 is a generic point on it, and
the other leg line (6) does not have a constraint. The
corresponding leg lines are linearly independent, thus forming
a hyperbolic congruence. In this condition, four planes meet,
𝑃5 and the platform intersects 𝐷2, which is the intersection of
𝑃1 and 𝑃3, at the point that link 5 meets 𝐷2. In the same way,
the three eqml: 𝑒𝑞𝑚𝑙(𝐼𝑉,0), 𝑒𝑞𝑚𝑙(𝐼𝐼,0) and 𝑒𝑞𝑚𝑙(𝐼𝑉,𝐼𝐼) intersect
at this point so the configuration is singular, according to
Property 2.
Note, the drawings of [4,6,18] where they draw 4B seems to
be incorrect, since in all the figures related to 4B they contain
3B, i.e. two planar pencils sharing a line.
Degenerate Congruence Singularity (4D): When five
lines that are in one plane or pass through a common point in
that plane form a singular degenerate congruence. Table 1
shows this singularity configuration. A singular configuration
of this type is when point 𝐵3 lies on 𝑃1, so 𝑃1 and 𝑃3 meet at
point 𝐵3. In addition, 𝐵3𝐵5 and 𝐴5𝐵5 links are on the same
line. In this way, four planes intersect at one point 𝐵3. In the
same way, the three eqml: 𝑒𝑞𝑚𝑙(𝐼,0), 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) and 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼) intersect at one point and based on Property 2 the
configuration is singular,.
General Complex Singularity (5A): This singularity is
characterized by having more than five skew lines. Table 1
shows this singularity configuration. The platform is parallel
to the base and a rotation about the vertical axis is performed,
for example, when both platforms are symmetric and the
rotation angle is . Three lines ('𝑎𝐵1 ', '𝑎𝐵3' and '𝑎𝐵5') are
the meeting of planar pencil formed by the two leg lines, with
the platform 𝐵1𝐵3𝐵5. The singularity occurs when the three
lines intersect at one point. Due to Property 2, the three eqml:
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0), 𝑒𝑞𝑚𝑙(0,𝑉) and 𝑒𝑞𝑚𝑙(𝑉,𝐼𝐼𝐼) intersect at one point, so
this is a singularity configuration. There is an infinitesimal
movement in all the joints along the vertical axis of the
platform.
Special Complex Singularity (5B): This type of
singularity occurs when six segments cross the same line.
Table 1 shows this singularity configuration. There are four
possibilities for a line '𝐵1𝑐' to intersect with this quadruple, all
of them leading to a singular configuration. Without loss of
generality we deal only with one case, the case in which line
'𝐵1𝑐' is the intersection line between the planes containing 𝑃3
and 𝑃5 that cross through point 𝐵1. Once again it is apparent
that the four planes meet, as the intersection of 𝑃3 and 𝑃5 is
line '𝐵1𝑐' itself, which intersects also with planes 𝑃1 and the
platform plane 𝐵1𝐵3𝐵5 at point 𝐵1. In this case, six segments
cross this line and there is an infinitesimal movement in all the
joints along this axis. In the same way, the three eqml:
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0), 𝑒𝑞𝑚𝑙(0,𝑉) and 𝑒𝑞𝑚𝑙(𝑉,𝐼𝐼𝐼) intersect at one point, so
based on Property 2 this is a singularity configuration.

8 Copyright © 2015 by ASME
Table 1. Comparison to other singularity analysis methods.
Combinatorial Method Grassmann–Cayley Algebra Grassmann Line Geometry
The three eqml: 𝑒𝑞𝑚𝑙(𝐼,0), 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) and 𝑒𝑞𝑚𝑙(𝐼,𝐼𝐼𝐼)
intersect at a point (𝐵1)
The four planes, defined by the actuator lines
and the position of the spherical joints,
intersect at a point (𝐵1)
Four lines of the six legs intersect at a
common point (𝐵1).
Bundle
Singularity (3C)
Five lines are concurrent with two skew lines
(𝐷1, 𝐷2)
Hyperbolic
Congruence
Singularity (4B)

9 Copyright © 2015 by ASME
All five lines are in one plane or pass
through one common point in that plane
Degenerate
Congruence
Singularity (4D)
General complex:
Generated by five independent skew lines.
Fichter's Singular Configuration:
The platform is parallel to the base and a
rotation about the vertical axis is performed,
for example, when both platforms are
symmetric and the rotation angle is
General
Complex
Singularity (5A)
Hunt's Singular Configuration:
All the lines meeting one given line
Special Complex
Singularity (5B)

10 Copyright © 2015 by ASME
5. FINDING SINGULAR CONFIGURATIONS OF MORE COMPLEX MECHANISMS THROUGH EQUIMOMENTAL SCREW The main advantage of the method introduced in this paper
is that it is applicable to finding the singularity of many types
of mechanisms and is not limited to a particular mechanism. In
this section, we give two examples, out of many that we have,
of more complex mechanisms: characterization of singular
configurations of 3D Tetrad and 3D Double-Triad.
In the same way as in 2D, in 3D we have relative
equimomental screw, for any two absolute equimomental
screws defined as follows:
Let $1 = (𝑆1𝑆01) and $2 = (
𝑆2𝑆02) be two screws acting in two
faces. The relative eqms is a line where the difference between
the two forces, 𝑆1𝑎𝑛𝑑 𝑆2, and the difference between the two
moments of the two forces along this line, 𝑆01 and 𝑆02, are
both in the same direction.
Figure 18. Two absolute equimomental Screw $ and $ and
their relative equimomental screw $ , .
If we have two screws, corresponding to two absolute eqms,
then we find relative eqms as follows:
For the two screws $1 and $2 we find a normal to their axes.
The relative eqms is perpendicular to this normal and the
intersection point can be calculated easily, and will appear in
the forthcoming paper.
The three-dimensional Tetrad consists of a circuit of size four
connected by eight links (legs), which can vary their lengths,
to a bottom body called the base.
As was shown in the previous sections, the space of the
singular configurations of a mechanism can be spanned by the
absolute eqml/s of the faces. From the truth table listed below
we can get all the singular configurations of the mechanism, as
was done in 2D [19].
Table 2. Truth table of the singular configurations of three-
dimensional Tetrad.
Position
No. 𝐹𝐼 𝐹𝐼𝐼 𝐹𝐼𝐼𝐼 𝐹𝐼𝑉 𝐹𝑉 𝐹𝑉𝐼 𝐹𝑉𝐼𝐼 𝐹𝑉𝐼𝐼𝐼 𝐹𝐼𝑋
𝐿1 0 0 0 0 0 0 0 0 1
⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 𝐿𝑘 1 1 0 1 1 1 1 1 1
⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 𝐿𝑛 1 1 1 1 1 1 1 1 1
Figure 19. The 3D Tetrad in generic configuration.
For the position number 𝐿𝑘 shown in Table 2, we find the
eqml/s by the dual Kennedy circle shown in Figure 20:
Figure 20. The dual Kennedy circle of a 3D Tetrad.
𝑒𝑞𝑚𝑙(𝐼,0) = (1 ∨ 2) ∧ ( ∨ 1 )
𝑒𝑞𝑚𝑙(𝐼,𝑉𝐼𝐼) = (7 ∨ 8) ∧ ( ∨ 12)
𝑒𝑞𝑚𝑙(0,𝑉) = (3 ∨ 4) ∧ (1 ∨ 11)
𝑒𝑞𝑚𝑙(𝑉𝐼𝐼,𝑉) = (5 ∨ 6) ∧ (11 ∨ 12)
𝑒𝑞𝑚𝑙(𝐼𝑋,0) = 1
𝑒𝑞𝑚𝑙(𝐼𝑋,𝑉𝐼𝐼) = 12
𝑒𝑞𝑚𝑠(0,𝑉𝐼𝐼) = ((𝐼, ) ∧ (𝐼, 𝑉𝐼𝐼)) ∨ (( , 𝑉) ∧ (𝑉𝐼𝐼, 𝑉))
∨ ((𝐼𝑋, ) ∧ (𝐼𝑋, 𝑉𝐼𝐼)) From the eqml defined above it follows the singular
characterization of the Tetrad, which is:
Let 𝑛1 be the normal to 𝑒𝑞𝑚𝑙(0,𝑉) and 𝑒𝑞𝑚𝑙(𝑉𝐼𝐼,𝑉), as shown in
Figure 22.
Let 𝑛2 be the normal to 𝑒𝑞𝑚𝑙(𝐼,0) and 𝑒𝑞𝑚𝑙(𝐼,𝑉𝐼𝐼), as shown in
Figure 23.
Let 𝑛3 be the normal to 𝑒𝑞𝑚𝑙(𝐼𝑋,0) and 𝑒𝑞𝑚𝑙(𝐼𝑋,𝑉𝐼𝐼), as shown
in Figure 24.

11 Copyright © 2015 by ASME
The 3D Tetrad is in a singular position if and only if there
exists a line which is perpendicular to both: 𝑛1, 𝑛2 and 𝑛3.
Figure 21. Singular configuration of the middle case shown in
Table 2.
Figure 22. ( ,𝑽) is the planar pencil formed by the two
leg lines 3, 4 and the two leg lines 10, 11. (𝑽 ,𝑽) is the
planar pencil formed by the two leg lines 5, 6 and the two leg
lines 11, 12. is the normal to ( ,𝑽) and (𝑽 ,𝑽).
Figure 23. ( , ) is the planar pencil formed by the two
leg lines 1, 2 and the two leg lines 9, 10. ( ,𝑽 ) is the
planar pencil formed by the two leg lines 7, 8 and the two leg
lines 9, 12. is the normal to ( , ) and ( ,𝑽 ).
Figure 24. is the normal to ( , ) and ( ,𝑽 ).
Figure 25. The 3D Tetrad in a Singular configuration.
The last example upon which we apply the combinatorial
method for characterizing the singular configurations is the 3D
Double-Triad. The 3D Double Triad consists of two platforms
that are connected to the base by nine legs, which can vary in
length.
Table 3. Truth table of the singular positions of three-
dimensional Double Triad.
𝐹𝐼 𝐹𝐼𝐼 𝐹𝐼𝐼𝐼 𝐹𝐼𝑉 𝐹𝑉 𝐹𝑉𝐼 𝐹𝑉𝐼𝐼 𝐹𝑉𝐼𝐼𝐼 𝐹𝐼𝑋 𝐹𝑋 𝐹𝑋𝐼 𝐿1 0 0 0 0 0 0 0 0 0 0 1
⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 𝐿𝑘 0 1 1 1 1 1 1 1 1 1 1
⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 𝐿𝑛 1 1 1 1 1 1 1 1 1 1 1

12 Copyright © 2015 by ASME
Figure 26. The 3D Double Triad in generic configuration.
For the position number 𝐿𝑘 shown in Table 3, we find the
eqml/s as shown in Figure 27:
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) = (1 ∨ 2) ∧ (5 ∨ 6)
𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,𝑉) = (3 ∨ 4) ∧ (5 ∨ 7)
𝑒𝑞𝑚𝑙(𝑉,0) = ((𝐼𝐼𝐼, ) ∧ (𝐼𝐼𝐼, 𝑉)) ∨ (6 ∧ 7)
𝑒𝑞𝑚𝑙(𝑋𝐼,0) = (12 ∨ 13) ∧ (14 ∨ 15)
𝑒𝑞𝑚𝑙(𝑋𝐼,𝑉𝐼𝐼) = (1 ∨ 11) ∧ ( ∨ 12)
𝑒𝑞𝑚𝑙(𝑉𝐼𝐼,0) = ((𝑋𝐼, ) ∧ (𝑋𝐼, 𝑉𝐼𝐼)) ∨ (13 ∧ )
From the eqml defined above it follows the singular
characterization of the Double Triad, which is:
Let 𝑛1 be the normal to 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,0) and 𝑒𝑞𝑚𝑙(𝐼𝐼𝐼,𝑉).
Let 𝑛2 be the normal to 𝑒𝑞𝑚𝑙(𝑋𝐼,0) and 𝑒𝑞𝑚𝑙(𝑋𝐼,𝑉𝐼𝐼).
𝐸𝑞𝑚𝑙(𝑉,𝑉𝐼𝐼) is the relative eqml of the two faces 𝐹𝑉 and 𝐹𝑉𝐼𝐼.
The 3D Double Triad is in a singular position if and only if
there exists a line which is perpendicular to both: 𝑒𝑞𝑚𝑙(𝑉,0),
𝑒𝑞𝑚𝑙(𝑉𝐼𝐼,0) and eqml(V,VII), as shown in Figure 27.
Figure 27. Singular configuration of the middle case shown in
Table 3.
6. CONCLUSIONS AND FUTURE RESEARCH
This paper presents a combinatorial method for
singularity analysis for parallel robots. The method presented
in the paper is consistent with other approaches that appear in
the literature. This paper focuses on statics while in [7,8,9,10],
they focus on kinematics.
It is important to note that 3/6 SP is an Assur Graph of type 3D
triad. In 2D it was proved [20] that the singularity of AG has
special properties and only AGs have the following property in
the singular configuration: the system is both mobile (has an
infinitesimal motion) and has a self-stress. A conjecture says
that the special singularity also exist in 3D Assur Graphs. In
3/6 SP (3D Triad) and in 6/6 SP (3D Body-bar atom) the
conjecture is proved to be correct. For that reason, we used
the self-stresses for characterizing the singularity
configurations of 3/6 SP. It seems that the method introduced
in this paper is applicable in finding the singularity of many
other types of mechanisms and is not limited to a particular
mechanism, such as: 3D Triad (3/6 SP), 3D Tetrad and 3D
Double-Triad, all introduced in this paper. In addition, the
method is based on discrete mathematics thus can be
computerized easily.
The authors believe that eqml/s is a fundamental concept in
statics and have a significant potential in characterizing
singularity of spatial parallel mechanisms. The authors
continue to explore this topic and in the forthcoming paper
they will present new singular conditions of complex
mechanisms in three-dimensional. Future work will also
include analytical techniques to complement the graphical
techniques that are provided in this paper.
ACKNOWLEDGMENT The authors wish to thank Prof. Marco Carricato for his
help to construct correctly the configuration of the hyperbolic
congruence (4B) on 3/6 Stewart platform. His assistance is
greatly appreciated.
REFERENCES
[1] Fichter E.F. McDowell E.D., 1980, “A novel design for a
robot arm”, Computer Technology Conf, New York: ASME,
pp. 250-256
[2] Hunt K.H., 1978, “Kinematic geometry of mechanisms”,
Oxford, University Press, Oxford, UK
[3] Fichter E.F., 1986, “A Stewart platform- based
manipulator: general theory and practical construction”, The
International Journal of Robotics Research, 5: 157-182
[4] Merlet J.P., 1989, “Singular Configurations of Parallel
Manipulators and Grassmann Geometry”, The International
Journal of Robotics Research, 8: 45-56
[5] Ebert-Uphoff I., Lee J.K. and Lipkin H., 2000,
“Characteristic tetrahedron of wrench singularities for parallel
manipulators with three legs”, Proceedings of the Institution of
Mechanical Engineers, Part C: Journal of Mechanical
Engineering Science 2002, 216: 81-93
[6] Ben-Horin P. and Shoham M., 2006, “Singularity
Condition of Six-Degree-of-Freedom Three-Legged Parallel
Robots Based on Grassmann–Cayley Algebra”, IEEE
Transactions on Robotics, Vol. 22, No. 4: 577-590
[7] Huang Z., Zhao Y.S., Wang J. and Yu J.J., 1999,
“Kinematic Principle and Geometrical Condition of General-
Linear-Complex Special Configuration of Parallel

13 Copyright © 2015 by ASME
Manipulators”, Mechanism and Machine Theory, 34: 1171-
1186
[8] Huang Z., Chen L.H. and Li Y.W., 2003, “The singularity
principle and property of Stewart manipulator”, Journal of
Robotic Systems, 20(4): 163–176
[9] Huang Z. and Cao Y., 2005, “Property identification of the
singularity loci of a class of Gough-Stewart manipulators”,
The International Journal of Robotics Research, Vol. 24, No.
8: 675-685
[10] Huang Z., Li Q. and Ding H., 2014, “Theory of Parallel
Mechanisms”, Springer, New York, Chapter, 7: 217-287
[11] Ebert-Uphoff I., Lee J.K. and Lipkin H., 2000,
“Characteristic tetrahedron of wrench singularities for parallel
manipulators with three legs”, Proceedings of the Institution of
Mechanical Engineers, Part C: Journal of Mechanical
Engineering Science, 2002 216: 81-93
[12] Dai J.S., Huang Z. and Lipkin H., 2006, “Mobility of
overconstrained parallel mechanisms”, ASME Journal of
Mechanical Design, Vol. 128(1): 220–229
[13] Foster D.E. and Pennock G.R., 2003, “A Graphical
Method to Find the Secondary Instantaneous Centers of Zero
Velocity for the Double Butterfly Linkage”, ASME Journal of
Mechanical Design, Vol. 125/ 268-274 [14] Shai O. and Pennock G.R., 2006, “A Study of the Duality
Between Planar Kinematics and Statics”, ASME Journal of
Mechanical Design, Vol. 128/ 587-598
[15] Swamy, M.N. and Thulasiraman, K., 1981, “Graphs:
Networks and Algorithms”, New York, John Wiley
[16] Shai O., 2002, “Utilization of the Dualism between
Determinate Trusses and Mechanisms”, Mechanism and
Machine Theory, Vol. 37, No. 11, pp. 1307-1323
[17] Hao F. and McCarthy J.M., 1998, “Conditions for line-
based singularities in spatial platform manipulator”, Journal of
Robotic Systems, 15(1): 43-55
[18] Schütz D. and Wahl F.M., 2011, “Robotic Systems for
Handling and Assembly”, Springer Tracts in Advanced
Robotics, Vol. 67, Springer, New York, pp. 79–84
[19] Shai O. and Polansky I., 2006, “Finding dead-point
positions of planar pin-connected linkages through graph
theoretical duality principle”, ASME Journal of Mechanical
Design, Vol. 128/ 599-609
[20] Servatius B., Shai O. and Whiteley W., 2010, “Geometric
Properties of Assur Graphs”, European Journal of
Combinatoric, Vol. 31, No. 4, pp. 1105-1120