Embed Size (px)
Citation preview

COMBINATORIAL METHOD FOR CHARACTERIZING SINGULAR CONFIGURATIONS IN PARALLEL MECHANISMS

INTRODUCTION
THE EQUIMOMENTAL LINE AND EQUIMOMENTAL SCREW
THE KENNEDY AND DUAL KENNEDY METHOD
APPLYING THE COMBINATORIAL METHOD FOR FINDING
SINGULARITY CONDITIONS
CONCLUSION
TABLE OF CONTENTS

INTRODUCTIONParallel manipulators have a specific mechanical architecture where all the links areconnected both at the base.
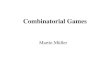
3/6 Stewart Platform-3D Triad
6/6 Stewart Platform 3D Double Triad 3D Tetrad

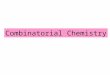
Hunt (1978) found a singular configuration of Stewart Platformwhen all the lines meeting one given line
Merlet (1989) studied the singularity of six-DOF 3/6-SP basedon the Grassmann line geometry. He discovered many newsingularities, including 3C, 4B, 4D, 5A, and 5B
Shoham and Ben-Horin (2006) proved that there is a class of144 combinations in which their singularity condition isdelineated to be the intersection of four planes at one point
Huang et al. (2014) introduced, based on the kinematicalrelationship of rigid bodies, that these four planes includethree normal planes of three velocities of three non-collinearpoints in the end effector, and the plane is determined bythese three points themselves
3C
4D 5A
5B
4B

THE EQUIMOMENTAL LINE AND EQUIMOMENTAL SCREW
Two absolute equimomental Screw $𝟏 and $𝟐 and their relative equimoment screw $𝟏,𝟐
Forces 𝑭𝑰 and 𝑭𝑰𝑰 acting along lines of action 𝒆𝒒𝒎𝒍 𝑰,𝟎 and 𝒆𝒒𝒎𝒍 𝑰𝑰,𝟎
Absolute equimomental line- a line upon which the moment exertedRelative equimomental line- for any two forces there exists a line along
which they exert the same moment at eachpoint on the line by the force is equal to zero
Relative equimomental screw- The relative eqms is a line where thedifference between the two forces, 𝑆1𝑎𝑛𝑑 𝑆2, and the difference betweenthe two moments of the two forces along this line, 𝑆01 and 𝑆02, are bothin the same direction

Property 1: For any two adjacent faces if the relative eqml passes through themeeting point of the two absolute eqml of these two faces themechanism is in a singular configuration
Non-singular configuration Singular configuration

THE KENNEDY AND DUAL KENNEDY METHOD
The Arnohold-Kennedy theorem states thatthe relative instant centers of any three linksi, j and k of the mechanism, 𝐼𝑖𝑗, 𝐼𝑖𝑘 and 𝐼𝑗𝑘,
must lie on a straight line
The dual Kennedy Theorem in statics: For anythree forces: 𝑭𝒊, 𝑭𝒋 and 𝑭𝒌 the three relative
eqml: 𝒆𝒒𝒎𝒍 𝒊,𝒋 , 𝒆𝒒𝒎𝒍 𝒋,𝒌 and 𝒆𝒒𝒎𝒍 𝒊,𝒌
intersect at the same point

APPLYING THE COMBINATORIAL METHOD FOR FINDING SINGULARITY CONDITIONS
𝑒𝑞𝑚𝑙 𝐼,0 = 5 = 8
𝑒𝑞𝑚𝑙 𝐼𝐼𝐼,0 = 3 = 7
𝑒𝑞𝑚𝑙 𝐼,𝐼𝐼𝐼 = 1 ∨ 2 ∧ 7 ∨ 8
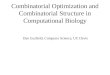
The dual Kennedy circle of a 3C configuration
Bundle Singularity (3C): A singular bundleoccurs when four lines of the six legsintersect at a common point
3C singular configuration with the eqml where faces IV, V, VI, VII are zero faces.

𝑒𝑞𝑚𝑙 𝐼,0 = 1 ∨ 2 ∧ 9 ∨ 10
𝑒𝑞𝑚𝑙 𝐼,𝑉𝐼𝐼 = 7 ∨ 8 ∧ 9 ∨ 12
𝑒𝑞𝑚𝑙 0,𝑉 = 3 ∨ 4 ∧ 10 ∨ 11
𝑒𝑞𝑚𝑙 𝑉𝐼𝐼,𝑉 = 5 ∨ 6 ∧ 11 ∨ 12
𝑒𝑞𝑚𝑙 𝐼𝑋,0 = 10
𝑒𝑞𝑚𝑙 𝐼𝑋,𝑉𝐼𝐼 = 12
𝑒𝑞𝑚𝑠 0,𝑉𝐼𝐼 = 𝐼, 0 ∨ 𝐼, 𝑉𝐼𝐼 ∧ 0, 𝑉 ∨ 𝑉𝐼𝐼, 𝑉 ∧
𝐼𝑋, 0 ∨ 𝐼𝑋, 𝑉𝐼𝐼

𝑛1 be the normal to 𝑒𝑞𝑚𝑙 0,𝑉 and 𝑒𝑞𝑚𝑙 𝑉𝐼𝐼,𝑉
𝑛2 be the normal to 𝑒𝑞𝑚𝑙 𝐼,0 and 𝑒𝑞𝑚𝑙 𝐼,𝑉𝐼𝐼
The 3D Tetrad is in a singular position if and only if there exists a line which is perpendicular to both: 𝑛1, 𝑛2 and 𝑛3
𝑛3 be the normal to 𝑒𝑞𝑚𝑙 𝐼𝑋,0 and 𝑒𝑞𝑚𝑙 𝐼𝑋,𝑉𝐼𝐼

CONCLUSION
The method presented is consistent with other approaches thatappear in the literature
It seems that the method introduced is applicable in finding thesingularity of many other types of mechanisms and is not limited to aparticular mechanism
The method is based on discrete mathematics thus can becomputerized easily
I believe that equimomental line/ screw is a fundamental concept instatics and have a significant potential in characterizing singularity ofspatial parallel mechanisms