Embed Size (px)
Citation preview

P
Collaborative Efforts with a Commercialization Partner to Develop a
Vacuum Assisted Harvest System
Paul Heinemann Karen Lewis Jim Schupp Tara Baugher Jude Liu William Messner Dan Guyer
Phil Brown, Mike Rasch, Chuck Dietrich DBR Conveyor Concepts
Presentation
Bridging the harvest automation gap
The issues
Background on project
Prototype development
Other project activities
Observations

“Harvest assist”
Bridging the gap between fully manual and fully automated harvest…

What is driving the push for new technologies?
Labor
Efficiency
Dwindling land
Competition from foreign sources

The Issues
Harvest 1900
Harvest 2000

Harvest 2015?
Harvest 2025?

Recent US mechanization history
60s & 70s
Mech. activity
90s: decline in
development
2000s new interest and
initiatives
2000s: Partnerships
and SCRI

Background & history – mechanization in US
Earlier attempts
– Mechanized harvest machines tested widely in US in 1960s through 1980s
– Development attempts failed due to excessive fruit damage
• fruit detachment
• contact with limbs or other fruit while falling through a three-dimensional tree canopy
• bulk collection procedures

Other issues
Tree architecture also contributed to problems:
mechanization attempted to fit
standard 3-D tree structure

Earlier attempts generally failed:
Lack of funding and lack of commercialization partners to solve problems of early prototype units created a decline in development activities in the 1980s, 90s, and early 2000s.

New approaches were needed for success!
• Mid 2000’s:
– New recognition of need for mechanization, driven by uncertainty in labor situation
– Effort to learn from previous history
New efforts to address tree architecture and its role in mechanization

Engineering Solutions for Specialty Crop Challenges Proceedings, 2007
• National specialty crop engineering solutions task force identified harvest mechanization and automation as a research priority

Engineering Solutions for Specialty Crop Challenges Proceedings, 2007
• Mechanical harvest aids offer the potential for more efficient harvest and increased consistency in fruit handling.
– current in-field bin filler technologies result in excessive bruising of fruit.
– complex fruit handling and equipment/operator interface is a major hurdle engineers must address for successful technology transfer.

. . . To make mechanization research a priority for ensuring the survival of the specialty crop
industry

Technology Roadmaps→ Funding in the 2008 Farm Bill for
Specialty Crop Engineering Solutions Research

To successfully compete for funding:
Cooperation was key!

2008: SCRI
USDA begins Specialty Crop Research Initiative program, first year of funding Fall 2008.

*Stakeholder Engagement *Strong Extension Component
*100% Match
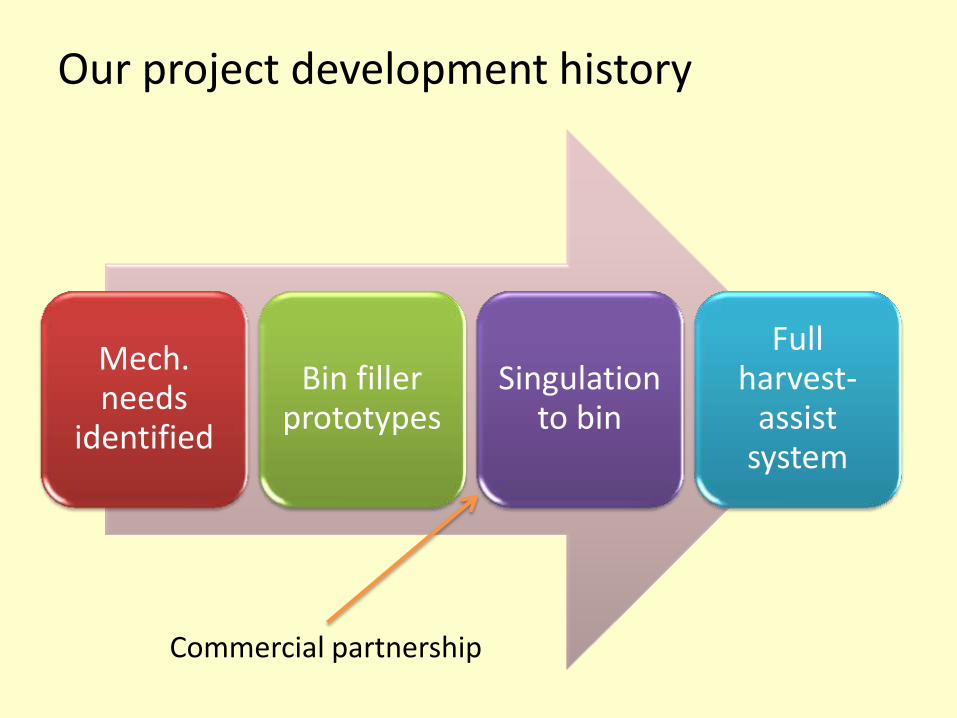
Our project development history
Mech. needs
identified
Bin filler prototypes
Singulation to bin
Full harvest-
assist system
Commercial partnership

Stepping back to March, 2005
Grass roots Ag Innovation Workshop in Gettysburg identifies labor efficiency as a priority.
PSU Extension and Researchers start Ag Innovations project and seek to coordinate with other like-minded groups, especially WSU/ WTFRC.

December, 2005
In-Depth Workshop on a Systems approach to orchard intensification, setting the stage for mechanization.
• 2006 PSU Ag Innovations team begins research and demo of orchard platforms for labor efficiency. Spotlight program and demo held in August, including early bin filler prototype.
• December 2006: In-Depth Workshop on Intensive Fruit Production- Planning for automation

2006
Agreement with USDA Appalachian Fruit Research Station Research Engineer Amy Tabb conduct commercial trials on a dry bin filler designed by Donald Peterson with a similar “disappearing floor” design concept.

Peterson-designed bin filler
Photo copyright 2010 ASABE Peterson, D.L., A.L. Tabb, T.A. Baugher, K. Lewis, and D.M. Glenn. 2010. Dry bin fillers for apples Applied Engineering in Agriculture. 26(4):541-549,

Bin filling
Bruising studies were conducted to quantify the efficacy of the bin filler in a packinghouse setting.
The bin filler also was tested for potential applications in assisted harvest operations.

More background on project
2007 harvest
PSU and Pennsylvania growers host “Specialty Crop Engineering Solutions” tour for robotics and precision agriculture engineers.
March 2008
Follow-up tour and strategic planning session held in March at Carnegie Mellon University.

SCRI Funding
Result was the funding of a USDA SCRI project led by CMU to investigate new solutions for assisted harvest and other labor intensive operations.
2008: connection with CMU
Bin filling efforts became part of CASC project
– CMU: Brian Kliethermes, Bill Messner
– WSU: Karen Lewis
– Penn State: Jim Schupp, Tara Baugher, Alex Leslie
Funding also came from WTFRC and SHAP

Bin filler designs
Two passive bin filler prototypes showed promise to potentially reduce fruit damage during bin filling

Bin filler prototypes

Bin filler to transport
Ag innovations group looked at integrating an apple transport system with a bin filler design
so that fruit are singulated upon picking all the way to the bin.

SCRI CASC had a harvest assist component from beginning.
• Original commercial partner didn’t work out, because of insufficient progress in first year. (Delayed progress initially)
• Discussion of alternative commercial partners ensues. A couple of businesses were considered.

Finding the new commercial partner:
• In March 2010, Jim McPherson (WTFRC), Phil Baugher (SHAP) and Jim Schupp visit Phil Brown Welding in Conklin, MI.
• Phil Brown Welding:
– strong reputation of delivering well designed and well built equipment to Ag and non-Ag sector.
– 30+ year history of working closely with the industries they serve and their land grant university (MSU)
Finding the new commercial partner
• Phil Brown formed DBR Conveyor Concepts LLC with Mike Rasch and Chuck Dietrich.
• All are impressed with the simple elegance of the DBR design, so DBR was included in CASC & WTFRC projects to address the harvest assist component.

DBR Inc. and CASC agreement: DBR will build a new prototype that will be tested in PA in 2010, and in 2011 in WA

Establishing the Partnership
• DBR builds a prototype vacuum harvester and mounts on PSU’s NBlosi Zip 25 platform.
• Second field-operational prototype, delivered to FREC on 31 August
• DBR stayed for a couple days to train on how to use the harvester.

Prototype development – 2010

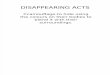
exhaust vent
engine/vacuum pump enclosure
vacuum return hoses
vacuum hose
deceleration mechanism
bin filler raising/lowering mechanism
bin
NBlosi

Vacuum-driven harvest assist unit
Front view
Temporary help

Vacuum-driven unit
Loaded bin transfer

Prototype development -2010
• First tests are run in high heat. Some issues arise with adhesives letting go in high heat, etc.
• Some issues arise with bruising. Bruise evaluations are conducted on several varieties at FREC by Baugher and Schupp. Bruising is occurring, and while often not bad, it is sometimes above the threshold for incidence.

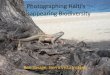
Vacuum-driven unit
vacuum return tubes


Original “elephant ear” distributor



Prototype development -2010
• Troubleshooting with instrumented sphere identifies some problems with apples hanging up in decelerator, and occasional impacts with elephant ears.
• New decelerator pads and elephant ears are developed by DBR and installed by Mike Rasch and Jim Schupp in September.

Revised “elephant ear” distributor

Revised “elephant ear” distributor

Prototype development -2010
• Subsequent testing confirms bruising greatly alleviated.
• Baugher and Schupp run first efficiency trials at FREC (Biglerville, PA).
• Demonstration workshop held in October.

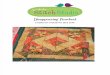
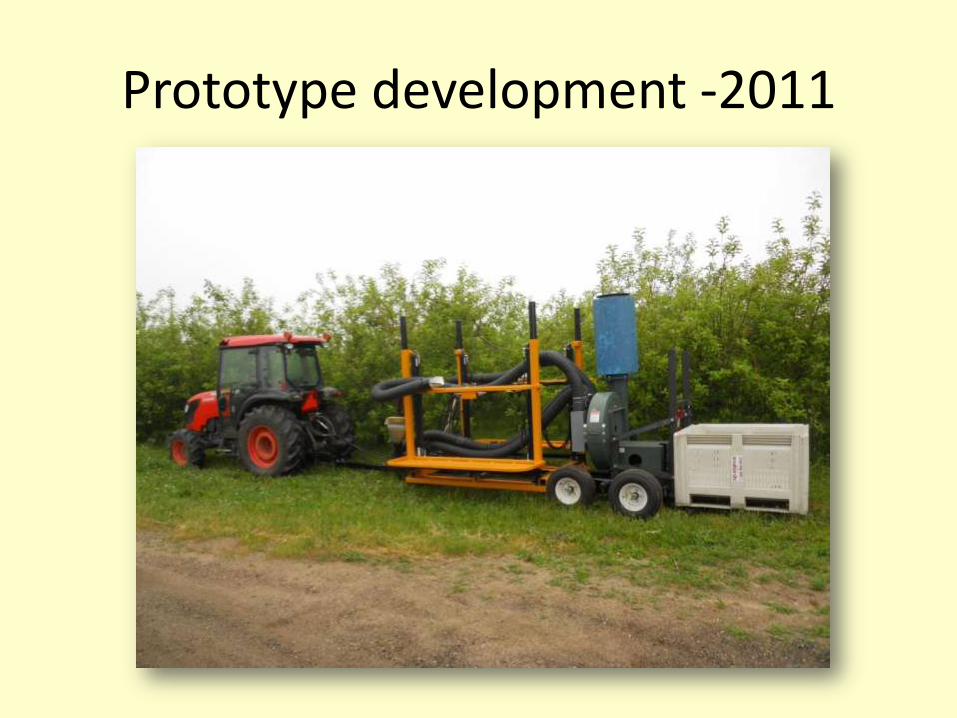
Prototype development -2011
• 2011: DBR builds a new prototype, based on input and outcomes of 2010 work
• new prototype is quieter, faster, narrower, and has a lower center of gravity. Some more efficiency tests run with 2010 prototype in PA, but research focus shifts to latest prototype in WA.
Prototype development -2011

Prototype development -2011

Harvest assist technologies
Vacuum-driven harvest assist device video

Proposed prototype development - 2012
• Modify 2011 version to suit Eastern and Midwest (Michigan) orchard architecture
• Evaluate fluid power characteristics of the vacuum-driven prototype fruit conveyance components, modify as needed.
• Conduct systems analyses on vacuum-driven prototype including energy inputs; worker/picker compatibility and efficiency with harvest assist components; durability of components; and concepts of bin management.
• Field test vacuum-driven prototype in research and commercial orchards.

2012 prototype
Other designs
• Low-cost gravity based
• Vacuum assist
• Vacuum driven

Low-cost devices for small operations
Transport of fruit primarily by gravity or vacuum-assist

Other proposed activities
• Ergonomics
• Socio-economic

Observations from investigators Karen Lewis, Jim Schupp, Tara Baugher
• We are better together than we are on our own.
• Labor is the top concern for producers of specialty crops in the US. Availability, seasonality and costs are all concerns.
• Health and safety in the workplace dictates a need to identify and develop engineering solutions or controls

Observations from investigators
• The most successful and fastest way to identify, develop, test and commercialize engineering solutions is to build partnerships between private and public sector.
• USDA NIFA SCRI has been very effective in building our collective capacity and to some extent, building public and private sector (university or equipment/ tech providers) partnerships.

Observations from investigators
• Grower member organizations like SHAP and WTFRC have also granted funding to engineering projects.

observations
• Successes of this and our thinning project are because of equal partnerships between commercial partners and researchers (engineers, horticulturists, etc.)
• Right commercial partner makes all the difference

observations
• DBR principles have spent weeks on the ground in PA and WA. This is critical.
• They have participated in field days, orchard trials and press interviews.
• They have prepared and delivered project updates to CASC team. Their actions were that of Co-PI’s – the expectations placed on them were the same as any other PI.
observations
Investigators report that their partnership with DBR has been rewarding and that project success depended on
1) funding
2) engaging grower community and cooperators
3) setting clear and measurable goals
4) active listening between partners

observations
• Would not have a protoype built and tested in WA state in 2011 without a commercial partner.
• Most universities are not well positioned to build equipment or systems of this size

observations
• Private sector has infrastructure, know how and are willing to take risks.
• Public sector can bring advanced engineering, science, data, economics, funding, outreach and non biased field validation. Public or grower dollars can help reduce risks that must be taken on by the private sector vendor/partner.

Thank You! Questions?