Embed Size (px)
Citation preview

Co-simulation
Cláudio Gomes*
http://msdl.cs.mcgill.ca/people/claudio
State of the Art and Open Challenges
* with Casper Thule, Peter Larsen, David Broman, and Hans Vangheluwe

The Essence
2
[1] http://overturetool.org/
[2] http://www.blensor.org/
[3] https://nl.mathworks.com/products/simulink.html
A technique to combine simulators.
Body
Controller
Env.Overture[1]
[3]
[2]
[4] Case Study by Kristof Berx , Davy Maes, and Klaas Gadeyne, from Flanders Make
[4]

Co-simulation: how?
Control Simulator
Model
Controller
SolverBody Simulator
SolverModel
Body
Env. Simulator
SolverModel
Env.
3
Body
Controller
Env.Overture[1]
[3]
[2]
[1] http://overturetool.org/
[2] http://www.blensor.org/
[3] https://nl.mathworks.com/products/simulink.html
[4] Case Study by Kristof Berx , Davy Maes, and Klaas Gadeyne, from Flanders Make
[4]

ControlSimulator
Co-simulation: how?
Body Simulator Env. SimulatorFMU.zip|-- .dll or .so|-- .xml
fmi2DoStep(…),fmi2SetReal(…), …
4[5] www.fmi-standard.org
[5]
Body
Controller
Env.Overture[1]
[3]
[2]
[1] http://overturetool.org/
[2] http://www.blensor.org/
[3] https://nl.mathworks.com/products/simulink.html
[4] Case Study by Kristof Berx , Davy Maes, and Klaas Gadeyne, from Flanders Make
[4]

Co-simulation: how?
Body Simulator
Model Solver
Body
Env. Simulator
Model Solver
Env.
Orchestrator
Body Simulator
Sensor&ControlSimulator
Env. Simulator
5
ControlSimulator
Model
Controller
Solver

t := t + H…
…
Co-simulation: how?Orchestrator
Body Simulator
ControlSimulator
Env. Simulator
simulateUntil(t+H,…)
getOutput(…)
setInput(…)
simulateUntil(t+H,…)
getOutput(…)
setInput(…)
simulateUntil(t+H,…)
ControlSimulator Body Simulator Env. Simulator
6
Gu, B., & Asada, H. H. (2001). Co-simulation of algebraically coupled dynamic subsystems. In American Control Conference, 2001. Proceedings of the 2001 (Vol. 3, pp. 2273–2278 vol.3). http://doi.org/10.1109/ACC.2001.946089

The ContextHistorical Overview
7

The Context
1980 1990 2000
8
[1] Fujimoto, R. M. (1990). Parallel discrete event simulation. Communications of the ACM, 33(10), 30–53. http://doi.org/10.1145/84537.84545
First discrete event synchronization algorithms [1]
[2]
[2] Kent Peacock, J., Wong, J. ., & Manning, E. G. (1979). Distributed simulation using a network of processors. Computer Networks (1976), 3(1), 44–56. http://doi.org/10.1016/0376-5075(79)90053-9

The Context
1980 1990 [1] http://www.frobnotz.com/cosim/cosim.html2000
Decomposition of sparsely coupled systems.
First discrete event synchronization algorithms
9
[1]
[2]
[2] Newton, A. R., & Sangiovanni-Vincentelli, A. L. (1983). Relaxation-Based Electrical Simulation. SIAM Journal on Scientific and Statistical Computing, 4(3), 485–524. http://doi.org/10.1137/0904036

The Context
1980 1990 2000
Decomposition of sparsely coupled systems.
First discrete event synchronization algorithms
Time warp O.S.
10
[1] Jefferson, D., Beckman, B., Wieland, F., Blume, L., & Diloreto, M. (1987). Distributed Simulation and the Time Warp Operating System David. ACM SIGOPS Operating Systems Review, 21(5), 77–93. http://doi.org/10.1145/37499.37508
[1]

The Context
1980 1990 2000
Decomposition of sparsely coupled systems.
First discrete event synchronization algorithms
Time warp O.S.
SIMNET(Military Training)
11
[1] Miller, D. C., & Thorpe, J. A. (1995). SIMNET: the advent of simulator networking. Proceedings of the IEEE, 83(8), 1114–1123. http://doi.org/10.1109/5.400452
[1]

The Context
12
1980 1990 2000

The Context
1990 2000 2010
SIMNET(Military Training)SW/HW co-simulation.
“Software developers were often left to develop code for months with severely limited ability to test […]. Painful integration efforts came late in the design cycle, and minor miscommunication became major design flaws.”
-- Anne Powell and Shawn Lin
[1] http://www.frobnotz.com/cosim/cosim.html
13
[1]

The Context
1990 2000 2010
SIMNET(Military Training)SW/HW co-simulation.
“A DSblock may serve as neutral ‘model bus’ to exchange nonlinear models between different modelling and simulation environments.”
DSBlock Standard
14
[1] Otter, M., & Elmqvist, H. (1995). The DSblock model interface for exchanging model components. In Proceedings of the Eurosim’95 Simulation Congress (pp. 505–510).
[1]

The Context
1990 2000 2010
SIMNET(Military Training)SW/HW co-simulation.DSBlock Standard
MPM&S Research agenda
15
[1] Vangheluwe, H. L., Vansteenkiste, G. C., & Kerckhoffs, E. J. H. (1996). Simulation for the Future : Progress of the Esprit Basic Research Working Group 8467. In Proceedings of the 1996 European Simulation Symposium (pp. XXIX--XXXIV). Genoa: Society for Computer Simulation International.
[1]
“A communication protocol which defines interaction between simulators in a tool and vendor independent manner.”

The Context
1990 2000 2010
SIMNET(Military Training)SW/HW co-simulation.DSBlock Standard
MPM&S Research agenda
DIS IEEE Standard
16
[1] IEEE Standard for Distributed Interactive Simulation--Application Protocols. (2012). IEEE Std1278.1-2012 (Revision of IEEE Std 1278.1-1995). http://doi.org/10.1109/IEEESTD.2012.6387564
[1]

The Context
1990 2000 2010
SIMNET(Military Training)SW/HW co-simulation.DSBlock Standard
MPM&S Research agenda
DIS IEEE Standard
Multi-abstraction
17
[1] Hines, K., & Borriello, G. (1997). Selective focus as a means of improving geographically distributed embedded system co-simulation. In 8th IEEE International Workshop on Rapid System Prototyping, 1997 (pp. 58–62). http://doi.org/10.1109/IWRSP.1997.618825
[1]

The Context
1990 2000 2010
SIMNET(Military Training)SW/HW co-simulation.DSBlock Standard
MPM&S Research agenda
DIS IEEE Standard
Multi-abstraction
Automotive, Railway, HVAC reported applications
18[2] Le Marrec, P., Valderrama, C. A., Hessel, F., Jerraya, A. A., Attia, M., & Cayrol, O. (1998). Hardware, software and mechanical cosimulation for automotive applications. In 9th International Workshop on Rapid System Prototyping (pp. 202–206). http://doi.org/10.1109/IWRSP.1998.676692
[1] Arnold, M., & Günther, M. (2001). Preconditioned Dynamic Iteration for Coupled Differential-Algebraic Systems. BIT Numerical Mathematics, 41(1), 1–25. http://doi.org/10.1023/A:1021909032551
[1]
[2]

The Context
19
1990 2000 2010

The Context
2000 2010
Automotive, Railway, HVAC reported applications
HLA IEEE Standard
20
[1] IEEE Standard for Modeling and Simulation (M&S) High Level Architecture (HLA) - Federate Interface Specification. (2010). IEEE Standard 1516-2010. Retrieved from https://standards.ieee.org/findstds/standard/1516-2010.html
[1]

The Context
2000 2010
Automotive, Railway, HVAC reported applications
HLA IEEE Standard
[1] Andert Jr., E. P., & Morgan, D. (1998). Collaborative Virtual Prototyping and Test. Naval Engineers Journal, 110(6), 17–23. http://doi.org/10.1111/j.1559-3584.1998.tb02962.x
DMU Concept
21
[1]

The Context
2000 2010
Automotive, Railway, HVAC reported applications
HLA IEEE Standard
IP Protection, FMI StandardDMU Concept
22
[1] www.fmi-standard.org
[1]

The Context
2000 2010
Automotive, Railway, HVAC reported applications
HLA IEEE Standard
IP Protection, FMI StandardDMU Concept
Digital Twin
[1] https://siemensplm.i.lithium.com/t5/image/serverpage/image-id/31800iB94D19235331E799?v=1.0 23
[1]

The Context
2000 2010
Automotive, Railway, HVAC reported applications
HLA IEEE Standard
IP Protection, FMI StandardDMU Concept
Digital TwinVirtual Design, Build, Operation, and Maintenance
24
Open Challenges

The VisionVirtual Design, Build, Operation, and Maintenance
25

Virtual Design
(x,y)
Φ
26[2] Case Study by Kristof Berx , Davy Maes, and Klaas Gadeyne, from Flanders Make
[2]

Frequent full system evaluation
(x,y)
Φ
Body
Controller
Sensors Env.
Virtual Design
Body
MotorL. MotorR.
Controller
Sensors
Battery
Env.
…at multiple levels of refinement
27

Virtual Build
28
[1] http://www.partsim.com/

…at any level of refinement
Virtual Build
Body
MotorL. MotorR.
Controller
Sensors
Battery
Env.
…between multiple suppliers
29
Frequent full system evaluation

Virtual Operation
[1] http://www.power-technology.com/features/featuredigital-twin-the-living-breathing-and-failing-virtual-power-plant-5742648/ 30

Body
MotorL. MotorR.
Controller
Sensors
Battery
Env.
…between multiple suppliers
…with X-in-the-loop
Virtual Operation
31
[1] Dávid, I., Meyers, B., Vanherpen, K., Van Tendeloo, Y., Berx, K., & Vangheluwe, H. (2017). Modeling and Enactment Support for Early Detection of Inconsistencies in Engineering Processes. In 2nd International Workshop on Collaborative Modelling in MDE (p. to appear). Austin, Texas.
[1,2]
[2] Case Study by Kristof Berx , Davy Maes, and Klaas Gadeyne, from Flanders Make
Frequent full system evaluation
…at any level of refinement
[3] https://www.virtalis.com/blogs/2013/09/06/germanys-dlr-turns-to-virtalis-for-cockpit-simulator-upgrade-4/
[3]
[4] Palmieri, M., Bernardeschi, C., & Masci, P. (2017). Co-simulation of semi-autonomous systems : the Line Follower Robot case study. In 1st Workshop on Formal Co-Simulation. Trento, Italy.
[4]

Virtual Maintenance
32[2] https://www.youtube.com/watch?v=2dCz3oL2rTw
[2]
[1] https://www.fool.com/investing/2016/09/18/what-is-the-industrial-internet.aspx
[1]

ChallengesA Roadmap
33

System Interaction
http://usatoday30.usatoday.com/news/nation/2007-02-26-volkswagen-recall_x.htm 34
“ … a faulty brake light could
work in tandem with the shift
interlock to immobilize the
vehicle and require towing”

System Heterogeneity - ABS
35
[1] https://www.cheatsheet.com/wp-content/uploads/2015/12/Brembo-Glowing-Corvette-Brakes.jpg?x84068
[1]
[2]
[2] Gomes, C. (2015). Foundations for Co-simulation -- IWT Proposal. Antwerp.
[3]
[3] El-Garhy, A. M., El-Sheikh, G. A., & El-Saify, M. H. (2013). Fuzzy Life-Extending Control of Anti-Lock Braking System. Ain Shams Engineering Journal, 4(4), 735–751. http://doi.org/10.1016/j.asej.2012.12.003

Challenges in Systems Development
Scale
Heterogeneity
Market Pressure
36
[1]
[2]
[2] www.imes.uni-hannover.de/
[1] Mustafiz, S., Denil, J., Lúcio, L., & Vangheluwe, H. (2012). The FTG+PM framework for multi-paradigm modelling. In Proceedings of the 6th International Workshop on Multi-Paradigm Modeling - MPM ’12(pp. 13–18). New York, New York, USA: ACM Press. http://doi.org/10.1145/2508443.2508446
[3] Nielsen, C. B., Larsen, P. G., Fitzgerald, J., Woodcock, J., & Peleska, J. (2015). Systems of Systems Engineering: Basic Concepts, Model-Based Techniques, and Research Directions. ACM Comput. Surv., 48(2), 18:1--18:41. http://doi.org/10.1145/2794381
[4] Mosterman, P. J., & Zander, J. (2016). Industry 4.0 as a Cyber-Physical System study. Software & Systems Modeling, 15(1), 17–29. http://doi.org/10.1007/s10270-015-0493-x

Tackling Complexity - Tools
Formalism & Tool Specialization
37[2] www.fmi-standard.org
[3] https://www.gtisoft.com/gt-suite-applications/thermal-management/powertraincooling/
Co-simulation[2] [3]
Model Exchange
[1] http://www.dlr.de/irs/en/desktopdefault.aspx/tabid-11079/#gallery/27339
[1]

Design Space Exploration
Full System Simulation
Use Cases
X-in-the-LoopIncremental
Testing/Certification
38[1] http://projects.au.dk/into-cps/dissemination/summerschool/
[1]

Open Challenges
Traceability
Consistency Management
Guarantees
Non-determinismX-in-the-LoopIncrement
Testing/Certification
Design Space Exploration
Full System Simulation
Dynamic Structure
Performance Accuracy Tradeoff
Debugging
Validity
39
(Time) Prediction

Validity
Denil, J., Klikovits, S., Mosterman, P. J., Vallecillo, A., & Vangheluwe, H. (2017). The experiment model and validity frame in M&S. In Proceedings of the Symposium on Theory of Modeling & Simulation (Vol. 49).
Validity
40
Vanherpen, K., Denil, J., De Meulenaere, P., & Vangheluwe, H. (2016). Ontological Reasoning as an Enabler of Contract-Based Co-design. In C. Berger, M. R. Mousavi, & R. Wisniewski (Eds.), Cyber Physical Systems. Design, Modeling, and Evaluation: 6th International Workshop, CyPhy 2016, Pittsburgh, PA, USA, October 6, 2016, Revised Selected Papers (pp. 101–115). Cham: Springer International Publishing. http://doi.org/10.1007/978-3-319-51738-4_8
forced
isp
lace
me
nt

Validity
Spiegel, Reynolds, and Brogan
Participants were instructed to ignore any constraints
related to the implementation of the model. In the falling
body simulation, there are multiple implementation choices
of numerical methods and numerical precision. In comput-
ing position as a function of time, what sort of numerical
integration method should be employed? What effect
would it have on correctness of results? We have chosen
not to discuss implementation assumptions in order to fo-
cus attention on the model instead of the simulation. When
joining composable simulations it will be necessary to
validate both the combined model and then to validate the
combined simulation.
After a period of two weeks submissions were tabu-
lated and a master list was created and discussed among
the contestants and others. We defer discussion of the re-
sults to after the presentation of the challenge in the next
section.
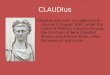
3.2 Falling Body Model
The following model is an extended version of the model
presented in Appendix A of the monograph by Davis and
Anderson (2003). A sphere is falling through some me-
dium and experiencing drag as it falls. Let p(t) equal the
position of the sphere at time t and p(0) = p0 be the initial
position. Let v(t) = p′(t) equal the velocity of the sphere at
time t, and let v(0) = v0 be the initial velocity. Calculate
p(t) and v(t) for all t ≥ 0.
The sphere is perfectly smooth, it has diameter d and
mass m. The medium has uniform density ρf and uniform
kinematic viscosity ν. Assume that when the sphere im-
pacts with the earth, p(tearth) = 0, it will remain on the
ground for all t > tearth.
The following forces will act on the sphere (Chow
1979):
• Gravity: The sphere experiences constant accel-
eration, g ≈ 9.8 m/s2.
• Buoyancy: mf = (1/6)πd3ρf against gravity.
• Inertial drag: (1/2) mf v′ (t)
• Viscous drag: (1/2)ρf · v(t) ·│v(t)│· π/4 · d2 ·
cd(v(t))
• Wave drag: Wave drag is negligible at subsonic
speeds.
We apply Newton’s Second Law to determine acceleration,
and then employ numerical methods of integration to cal-
culate velocity and position.
Figure 1: Falling Body Model
The term cd is the drag coefficient and it is defined as a
function of the Reynolds number, which is Re = v(t) · d / ν.
The drag coefficient is determined experimentally as a
function of the Reynolds number. Both the drag coeffi-
cient and the Reynolds number are dimensionless values.
For a perfectly smooth sphere, cd can be approximated
piecewise with the following function,
•••
•
•••
•
•
=
•<•
••<••
••<
•<
•<•
76
654275.0
5
2
10Re10218.0
102Re103(Re)000366.0
103Re4005.0
400Re1
1Re10
646.0(Re)
24
Re24
dc
The reader interested in pursuing the challenge without
bias from the challenge results should pause at this point,
continuing when identification of unstated constraints is
completed. We discuss the results of the challenge next.
3.3 Challenge Results and Constraint Taxonomy
The competition produced a master list of twenty-nine
validation constraints (see Appendix). From them we have
derived a taxonomy of validation constraint types. Every
effort has been made to remove redundant constraints and
to represent identified validation constraints as concisely as
possible. We make no claim to having found all validation
constraints for the falling body model.
It is illuminating to consider that the top three contest-
ants identified only 21, 19, and 16 constraints, respectively,
out of the master list (see Table 1). No single participant
was capable of identifying more than three-quarters of all
currently identified constraints. Like the component de-
signers of (Garlan, Allan, and Ockerbloom 1995) our chal-
lenge participants were neither “lazy, stupid, nor mali-
cious.” Each participant failed to identify several implicit
41
[1] Spiegel, M., Reynolds, P. F., & Brogan, D. C. (2005). A Case Study of Model Context for Simulation Composability and Reusability. In Proceedings of the Winter Simulation Conference, 2005. (Vol. 2005, pp. 437–444). IEEE. http://doi.org/10.1109/WSC.2005.1574279

Validity
Spiegel, Reynolds, and Brogan In an informal contest related to our study, no participant
identified more than 75% of the ultimate set of constraints
identified. Borrowing from Garlan, Allan, and Ocker-
bloom our challenge participants were neither “lazy, stu-
pid, nor malicious.” (1995)
We believe the study reported here can be useful to the
reader beyond the results above. The falling body model
presents a fine example for testing any proposed reusability
process. If the process cannot lead to the efficient extrac-
tion of the constraints listed in the Appendix, then it is of
questionable value.
In the future we anticipate further study of our initial
taxonomy of validation constraints. Will other types of
simulations yield new categories of constraints? The tax-
onomy is useful only if it can serve as a general guidepost
that suggests hidden constraints that have not been identi-
fied. Additionally the taxonomy for the simulation com-
munity may benefit from insights in the larger domain of
software design. Generic software applications contain
properties that are identified as invariant or time-
dependent. Can the lessons from formal software analysis
be applied to our objectives? We will be exploring these
issues.
ACKNOWLEDGEMENTS
We gratefully acknowledge support from the National Sci-
ence Foundation (ITR 0426971), as well as from our col-
leagues in the Modeling and Simulation Technology Re-
search Initiative (MaSTRI) at the University of Virginia.
We would also like to thank all the participants of the fal-
ling body challenge: Robert Bartholet, Joseph Carnahan,
Mark Farrington, Aleks Gershaft, William Kammersell,
Yinping Kuang, Xinyu Liu, Yannick Loitiere, Thomas Lu-
bitz, and Weide Zhang.
APPENDIX: FALLING BODY CONSTRAINTS
1. Invariant Constraints
1.a Sphere Attributes
1. Sphere Property - The body is a sphere and it re-
mains spherical.
2. Smooth Property - The body is smooth and it re-
mains smooth.
3. Impermeable Property - The body is completely
impermeable.
4. Initial Velocity - The body has an initial velocity
of v0 that has no horizontal component of motion.
5. Angular Velocity - The body has no initial angu-
lar velocity.
6. Constant Mass - The mass of the body remains
constant over time. The body does not experience
ablation or accretion.
7. Constant Diameter - The diameter of the body
remains constant over time.
8. Distribution of Mass - The body has a centrally
symmetric mass distribution that remains constant
over time.
9. Uncertainty Principle - The diameter of the body
is much greater than the Plank length.
10. Brownian Motion - The mass and diameter of the
body are large enough such that Brownian motion
of the fluid has negligible impact on the body.
11. General Relativity - The mass of the body is low
enough to ignore the gravitational curvature of
space-time.
1.b Fluid Attributes
12. Fluid Density - The fluid density is constant. The
fluid is incompressible.
13. Fluid Pressure - The fluid pressure is constant.
14. Fluid Temperature - The fluid temperature is con-
stant.
15. Kinematic Viscosity - The kinematic viscosity is
constant. The medium is a Newtonian fluid.
16. Stationary Fluid - The fluid is stationary apart
from being disturbed by the falling body.
17. Infinite Fluid - The volume of the fluid is large
enough to completely envelope the sphere. The
movement of the fluid is not restricted by a con-
tainer such as a pipe or tube.
1.c Earth Attributes
18. Flat Terrain - The ground does not have terrain
and remains flat for all t > 0.
19. Coriolis Effect - The Earth is not rotating. We ig-
nore the Coriolis effect.
2. Dynamic Constraints
20. Mach Speed - The velocity of the body is suffi-
ciently less than the speed of sound for that me-
dium.
21. Special Relativity - The velocity of the body is
sufficiently less than the speed of light for that
medium.
22. Reynolds Number - The Reynolds number re-
mains between 10-2 and 107 for all t > 0. The
Reynolds number is a function of velocity.
3. Inter-Object Constraints
23. Sphere/Fluid Interaction - The body and the fluid
interact only through buoyancy and drag. For ex-
ample, the body cannot dissolve in the fluid, nor
can the body transfer heat to the fluid. Spiegel, Reynolds, and Brogan
In an informal contest related to our study, no participant
identified more than 75% of the ultimate set of constraints
identified. Borrowing from Garlan, Allan, and Ocker-
bloom our challenge participants were neither “lazy, stu-
pid, nor malicious.” (1995)
We believe the study reported here can be useful to the
reader beyond the results above. The falling body model
presents a fine example for testing any proposed reusability
process. If the process cannot lead to the efficient extrac-
tion of the constraints listed in the Appendix, then it is of
questionable value.
In the future we anticipate further study of our initial
taxonomy of validation constraints. Will other types of
simulations yield new categories of constraints? The tax-
onomy is useful only if it can serve as a general guidepost
that suggests hidden constraints that have not been identi-
fied. Additionally the taxonomy for the simulation com-
munity may benefit from insights in the larger domain of
software design. Generic software applications contain
properties that are identified as invariant or time-
dependent. Can the lessons from formal software analysis
be applied to our objectives? We will be exploring these
issues.
ACKNOWLEDGEMENTS
We gratefully acknowledge support from the National Sci-
ence Foundation (ITR 0426971), as well as from our col-
leagues in the Modeling and Simulation Technology Re-
search Initiative (MaSTRI) at the University of Virginia.
We would also like to thank all the participants of the fal-
ling body challenge: Robert Bartholet, Joseph Carnahan,
Mark Farrington, Aleks Gershaft, William Kammersell,
Yinping Kuang, Xinyu Liu, Yannick Loitiere, Thomas Lu-
bitz, and Weide Zhang.
APPENDIX: FALLING BODY CONSTRAINTS
1. Invariant Constraints
1.a Sphere Attributes
1. Sphere Property - The body is a sphere and it re-
mains spherical.
2. Smooth Property - The body is smooth and it re-
mains smooth.
3. Impermeable Property - The body is completely
impermeable.
4. Initial Velocity - The body has an initial velocity
of v0 that has no horizontal component of motion.
5. Angular Velocity - The body has no initial angu-
lar velocity.
6. Constant Mass - The mass of the body remains
constant over time. The body does not experience
ablation or accretion.
7. Constant Diameter - The diameter of the body
remains constant over time.
8. Distribution of Mass - The body has a centrally
symmetric mass distribution that remains constant
over time.
9. Uncertainty Principle - The diameter of the body
is much greater than the Plank length.
10. Brownian Motion - The mass and diameter of the
body are large enough such that Brownian motion
of the fluid has negligible impact on the body.
11. General Relativity - The mass of the body is low
enough to ignore the gravitational curvature of
space-time.
1.b Fluid Attributes
12. Fluid Density - The fluid density is constant. The
fluid is incompressible.
13. Fluid Pressure - The fluid pressure is constant.
14. Fluid Temperature - The fluid temperature is con-
stant.
15. Kinematic Viscosity - The kinematic viscosity is
constant. The medium is a Newtonian fluid.
16. Stationary Fluid - The fluid is stationary apart
from being disturbed by the falling body.
17. Infinite Fluid - The volume of the fluid is large
enough to completely envelope the sphere. The
movement of the fluid is not restricted by a con-
tainer such as a pipe or tube.
1.c Earth Attributes
18. Flat Terrain - The ground does not have terrain
and remains flat for all t > 0.
19. Coriolis Effect - The Earth is not rotating. We ig-
nore the Coriolis effect.
2. Dynamic Constraints
20. Mach Speed - The velocity of the body is suffi-
ciently less than the speed of sound for that me-
dium.
21. Special Relativity - The velocity of the body is
sufficiently less than the speed of light for that
medium.
22. Reynolds Number - The Reynolds number re-
mains between 10-2 and 107 for all t > 0. The
Reynolds number is a function of velocity.
3. Inter-Object Constraints
23. Sphere/Fluid Interaction - The body and the fluid
interact only through buoyancy and drag. For ex-
ample, the body cannot dissolve in the fluid, nor
can the body transfer heat to the fluid.
Spiegel, Reynolds, and Brogan In an informal contest related to our study, no participant
identified more than 75% of the ultimate set of constraints
identified. Borrowing from Garlan, Allan, and Ocker-
bloom our challenge participants were neither “lazy, stu-
pid, nor malicious.” (1995)
We believe the study reported here can be useful to the
reader beyond the results above. The falling body model
presents a fine example for testing any proposed reusability
process. If the process cannot lead to the efficient extrac-
tion of the constraints listed in the Appendix, then it is of
questionable value.
In the future we anticipate further study of our initial
taxonomy of validation constraints. Will other types of
simulations yield new categories of constraints? The tax-
onomy is useful only if it can serve as a general guidepost
that suggests hidden constraints that have not been identi-
fied. Additionally the taxonomy for the simulation com-
munity may benefit from insights in the larger domain of
software design. Generic software applications contain
properties that are identified as invariant or time-
dependent. Can the lessons from formal software analysis
be applied to our objectives? We will be exploring these
issues.
ACKNOWLEDGEMENTS
We gratefully acknowledge support from the National Sci-
ence Foundation (ITR 0426971), as well as from our col-
leagues in the Modeling and Simulation Technology Re-
search Initiative (MaSTRI) at the University of Virginia.
We would also like to thank all the participants of the fal-
ling body challenge: Robert Bartholet, Joseph Carnahan,
Mark Farrington, Aleks Gershaft, William Kammersell,
Yinping Kuang, Xinyu Liu, Yannick Loitiere, Thomas Lu-
bitz, and Weide Zhang.
APPENDIX: FALLING BODY CONSTRAINTS
1. Invariant Constraints
1.a Sphere Attributes
1. Sphere Property - The body is a sphere and it re-
mains spherical.
2. Smooth Property - The body is smooth and it re-
mains smooth.
3. Impermeable Property - The body is completely
impermeable.
4. Initial Velocity - The body has an initial velocity
of v0 that has no horizontal component of motion.
5. Angular Velocity - The body has no initial angu-
lar velocity.
6. Constant Mass - The mass of the body remains
constant over time. The body does not experience
ablation or accretion.
7. Constant Diameter - The diameter of the body
remains constant over time.
8. Distribution of Mass - The body has a centrally
symmetric mass distribution that remains constant
over time.
9. Uncertainty Principle - The diameter of the body
is much greater than the Plank length.
10. Brownian Motion - The mass and diameter of the
body are large enough such that Brownian motion
of the fluid has negligible impact on the body.
11. General Relativity - The mass of the body is low
enough to ignore the gravitational curvature of
space-time.
1.b Fluid Attributes
12. Fluid Density - The fluid density is constant. The
fluid is incompressible.
13. Fluid Pressure - The fluid pressure is constant.
14. Fluid Temperature - The fluid temperature is con-
stant.
15. Kinematic Viscosity - The kinematic viscosity is
constant. The medium is a Newtonian fluid.
16. Stationary Fluid - The fluid is stationary apart
from being disturbed by the falling body.
17. Infinite Fluid - The volume of the fluid is large
enough to completely envelope the sphere. The
movement of the fluid is not restricted by a con-
tainer such as a pipe or tube.
1.c Earth Attributes
18. Flat Terrain - The ground does not have terrain
and remains flat for all t > 0.
19. Coriolis Effect - The Earth is not rotating. We ig-
nore the Coriolis effect.
2. Dynamic Constraints
20. Mach Speed - The velocity of the body is suffi-
ciently less than the speed of sound for that me-
dium.
21. Special Relativity - The velocity of the body is
sufficiently less than the speed of light for that
medium.
22. Reynolds Number - The Reynolds number re-
mains between 10-2 and 107 for all t > 0. The
Reynolds number is a function of velocity.
3. Inter-Object Constraints
23. Sphere/Fluid Interaction - The body and the fluid
interact only through buoyancy and drag. For ex-
ample, the body cannot dissolve in the fluid, nor
can the body transfer heat to the fluid. Spiegel, Reynolds, and Brogan
24. Sphere/Earth Interaction - The body and the earth
interact only through the gravitational force.
25. Fluid/Earth Interaction - The fluid and the earth
do not interact.
26. Closed System - The Earth, sphere, and fluid do
not interact with any other objects.
27. Simple Gravity - Gravity is a constant downward
force of 9.8 m/s2.
28. One-Sided Gravity - The mass of the body is
much less than the mass of the Earth. The Earth
is not affected by the gravitational pull of the
body.
29. Inelastic Collision - The collision between the
sphere and the ground is perfectly inelastic.
REFERENCES
Bartholet, R., D.C. Brogan, P.F. Reynolds, and J.C.
Carnahan 2004. In search of the philosopher’s stone:
Simulation composability versus component-based
software design. In Proceedings of the Fall 2004 Simulation Interoperability Workshop, Orlando, FL.
Carnahan, J.C., D.C. Brogan and P.F. Reynolds. Simula-
tion-specific characteristics. Submitted for publica-
tion.
Chow, C. 1979. Introduction to computational fluid me-
chanics. Hoboken, New Jersey: John Wiley & Sons
Inc.
Davis, P.K. and R.H. Anderson 2003. Improving the com-
posability of Department of Defense models and simu-
lations, Rand Corporation Report. <http://www.rand.org/publications/MG
/MG101/>
Garlan, D., R. Allen, and J. Ockerbloom 1995. Architec-
tural mismatch or why it’s hard to build systems out of
existing parts. In Proceedings of the Seventeenth In-ternational Conference on Software Engineering. Se-
attle WA.
Hanks, K.S., K.C. Knight, and E.A. Strunk. 2001. Erro-
neous requirements: a linguistic basis for their occur-
rence and an approach to their reduction. In Proceed-ings of the 26th Annual NASA Goddard Software Engineering Workshop. Greenbelt, MD
Hayhurst, K.J. and C.M. Holloway 2001. Challenges in
software aspects of aviation systems. In Proceedings of the 26th Annual NASA Goddard Software Engineer-ing Workshop. Greenbelt, MD
Kasputis, S. and H.C. Ng 2000. Composable simulations.
In Proceedings of the 2000 Winter Simulation Confer-ence, ed. J.A. Joines, R.R. Barton, K. Kang, and P.A.
Fishwick, 1577-1584.
Lutz, R. R. 1993. Analyzing software requirements errors
in safety-critical, embedded systems. In Proceedings of the IEEE International Symposium on Requirements
Engineering. Piscataway, New Jersey: Institute of
Electrical and Electronics Engineers.
Malak, R. J., and C.J.J. Paradis 2004. Foundations of vali-
dating reusable behavioral models in engineering de-
sign problems. In Proceedings of the 2004 Winter Simulation Conference, ed. R.G. Ingalis, M.D. Ros-
setti, J.S. Smith, and B.A. Peters, 420-428. Piscata-
way, New Jersey: Institute of Electrical and Electron-
ics Engineers.
Page, E.H. and J.M. Opper 1999. Observations on the
complexity of composable simulation. In Proceedings of the 1999 Winter Simulation Conference, ed. P.A.
Farrington, H.B. Nembhard, D.T. Sturrock, and G.W.
Evans, 553-560. Piscataway, New Jersey: Institute of
Electrical and Electronics Engineers.
Petty, M.D. and E.W. Weisel 2003a. A composability
lexicon. In Proceedings of the Spring 2003 Simulation Interoperability Workshop, 181-187. Simulation In-
teroperability Standards Organization.
Petty, M.D. and E.W. Weisel 2003b. A formal basis for a
theory of semantic composability. In Proceedings of the Spring 2003 Simulation Interoperability Work-shop, 416-423. Simulation Interoperability Standards
Organization.
Shaughnessy, E.J., I.M. Katz, and J.P. Schaffer. 2005. In-
troduction to fluid mechanics. New York: Oxford
English Press.
Sullivan, K.J. and J.C. Knight 1996. Experience assessing
an architectural approach to large-scale, systematic re-
use. In Proceedings of the 18th International Confer-ence on Software Engineering (ICSE18), 220-229.
Berlin, Germany, March 25-29.
Yam, P. September 2004. Everyday Einstein. Scientific American, 50-55.
Yilmatz, L. 2004. On the need for contextualized intro-
spective models to improve reuse and composability
of defense simulations. Journal of Defense Modeling and Simulation 1 (3): 141-151.
Zeigler, B.P., H. Praehofer, and T.G. Kim. 2000. Theory
of Modeling and Simulation, 2nd Edition. Burlington,
MA: Academic Press.
AUTHOR BIOGRAPHIES
MICHAEL SPIEGEL is a Ph.D. Candidate in Computer
Science and a member of the Modeling and Simulation
Technology Research Initiative (MaSTRI) at the Univer-
sity of Virginia. Michael earned his B.A. in Computer
Science at Swarthmore College. He has previously held
the position of research associate at StreamSage, Inc.
studying natural language processing for multimedia
search engines. His email addresses is
<[email protected]> and his web ad-
dress is <www.cs.virginia.edu/~ms6ep> .
42

Open Challenges
Traceability
Consistency Management
(Time) Prediction
Guarantees
Non-determinismX-in-the-LoopIncrement
Testing/Certification
Design Space Exploration
Full System Simulation
Dynamic Structure
Performance Accuracy Tradeoff
Debugging
Validity
43

Non-Determinism
Non-determinism
Lawrence, D. P. Y., Gomes, C., Denil, J., Vangheluwe, H., & Buchs, D. (2016). Coupling Petri nets with Deterministic Formalisms Using Co-simulation. In Proceedings of the Symposium on Theory of Modeling & Simulation: DEVS Integrative M&S Symposium (p. 6:1--6:8). Pasadena, CA, USA.
Mancini, T., Mari, F., Massini, A., Melatti, I., & Tronci, E. (2014). Anytime System Level Verification via Random Exhaustive Hardware in the Loop Simulation. In Digital System Design (DSD), 2014 17th Euromicro Conference on (pp. 236–245). http://doi.org/10.1109/DSD.2014.91
Clarke, E., Donzé, A., & Legay, A. (2010). On simulation-based probabilistic model checking of mixed-analog circuits. Formal Methods in System Design, 36(2), 97–113. http://doi.org/10.1007/s10703-009-0076-y
44
Denil, J., Salay, R., Paredis, C., & Vangheluwe, H. (2018). Towards Agile Model-Based Systems Engineering. In 3rd Flexible MDE Workshop, MoDELS (p. to appear). Austin, Texas.

Open Challenges
Traceability
Consistency Management
(Time) Prediction
Guarantees
Non-determinismX-in-the-LoopIncrement
Testing/Certification
Design Space Exploration
Full System Simulation
Dynamic Structure
Performance Accuracy Tradeoff
Debugging
Validity
45

Guarantees – Safety
Guarantees
46
Automaton Abstraction
Carter, R., & Navarro-López, E. M. (2012). Dynamically-Driven Timed Automaton Abstractions for Proving Liveness of Continuous Systems (pp. 59–74). http://doi.org/10.1007/978-3-642-33365-1_6
Navarro-López, E. M., & O’Toole, M. D. (2017). Automated generation of hybrid automata for multi-rigid-body mechanical systems and its application to the falsification of safety properties. Mathematical and Computer Modelling of Dynamical Systems, 0(0), 1–32. http://doi.org/10.1080/13873954.2017.1369437
Maler, O., & Batt, G. (2008). Approximating Continuous Systems by Timed Automata. In Formal Methods in Systems Biology (pp. 77–89). Berlin, Heidelberg: Springer Berlin Heidelberg. http://doi.org/10.1007/978-3-540-68413-8_6

Guarantees – Numerical Error Bounds
Guarantees
Frehse, G. (2015). An Introduction to Hybrid Automata, Numerical Simulation and Reachability Analysis. In Formal Modeling and Verification of Cyber-Physical Systems (pp. 50–81). Wiesbaden: Springer Fachmedien Wiesbaden. http://doi.org/10.1007/978-3-658-09994-7_3
Bouissou, O., Chapoutot, A., & Djoudi, A. (2013). Enclosing Temporal Evolution of Dynamical Systems Using Numerical Methods. In NASA Formal Methods (pp. 108–123). http://doi.org/10.1007/978-3-642-38088-4_8
Immler, F. (2014). Formally Verified Computation of Enclosures of Solutions of Ordinary Differential Equations. In Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) (Vol. 8430 LNCS, pp. 113–127). http://doi.org/10.1007/978-3-642-38088-4_8
47

Guarantees – Correct Orchestration
48
Lee, E. A., & Zheng, H. (2005). Operational semantics of hybrid systems. In M. Morari & L. Thiele (Eds.), Hybrid Systems: Computation and Control (Vol. 3414, pp. 25–53). Springer Berlin Heidelberg. http://doi.org/10.1007/978-3-540-31954-2_2
Broman, D., Greenberg, L., Lee, E. A., Masin, M., Tripakis, S., & Wetter, M. (2015). Requirements for Hybrid Cosimulation Standards. In Proceedings of the 18th International Conference on Hybrid Systems: Computation and Control (pp. 179–188). New York, NY, USA: ACM. http://doi.org/10.1145/2728606.2728629
Iugan, L. G., Boucheneb, H., & Nicolescu, G. (2015). A generic conceptual framework based on formal representation for the design of continuous/discrete co-simulation tools. Design Automation for Embedded Systems, 19(3), 243–275. http://doi.org/10.1007/s10617-014-9156-3
Guarantees
Cavalcanti, A., Woodcock, J., & Amálio, N. (2016). Behavioural Models for FMI Co-simulations. In A. Sampaio & F. Wang (Eds.), (pp. 255–273). Cham: Springer International Publishing. http://doi.org/10.1007/978-3-319-46750-4_15

Open Challenges
Traceability
Consistency Management
(Time) Prediction
Guarantees
Non-determinismX-in-the-LoopIncrement
Testing/Certification
Design Space Exploration
Full System Simulation
Dynamic Structure
Performance Accuracy Tradeoff
Debugging
Validity
49

Summary
50
Context
• Past
Vision
• Future
Challenges
• Roadmap
Co-simulation

Thank you!Questions?
51