Embed Size (px)
Citation preview

Click to edit Master subtitle style
Urban Mobility: A Data-Driven Approach
Anders Johansson
casa.ucl.ac.uk – www.ajohansson.com

Simulating pedestrians can been done in various different ways:
Discrete Continuous space space
Microscopic
Macroscopic
Cellular-automata models
Social-force model
Fluid-dynamic modelsQueuing-
network models
Fluid-dynamic model: www.matyka.pl
Simulating pedestrians can been done in various different ways:

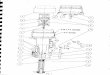
The social force model (Helbing et al., 1990, 1995, 2000):
Each pedestrian is influenced by a number of forces:
Repulsive forces from other pedestrians.
Repulsive forces from borders. Driving force towards the desired direction of
motion. Force into the desired direction
of motion
Forces from boundaries
Forces from other pedestrians
Resulting force
The social force model (Helbing et al., 1990, 1995, 2000):
Each pedestrian is influenced by a number of forces:
Repulsive forces from other pedestrians.
Repulsive forces from borders. Driving force towards the desired direction of motion.

The Social force model is specified via the equation of motion:
Where the force is composed by:
The Social force model is specified via the equation of motion:
Where the force is composed by:

The Social force model is specified via the equation of motion:
Where the force is composed by:
Acceleration time
Desired velocity
Actual velocity
Forces from all other pedestrians β
Forces from all boundaries i
Noise term
The Social force model is specified via the equation of motion:
Where the force is composed by:

Everything put together: Social interaction forces, obstacle forces, and a driving force towards the destination:
Everything put together: Social interaction forces, obstacle forces, and a driving force towards the destination:

To be able to calibrate and validate the model, data from different locations have been gathered:
Budapest, Hungary Budapest, Hungary Dresden, Germany
To be able to calibrate and validate the model, data from different locations have been gathered:

88
Even more detailed data have been obtained from a walking experiment carried out together with Guy Théraulaz and Mehdi Moussaïd at Paul Sabatier University. Markers were put on the feet and knees and were tracked with an accuracy of a few mm, and with a time frequency of 100 measurements per second.
Even more detailed data have been obtained from a walking experiment carried out together with Guy Théraulaz and Mehdi Moussaïd at Paul Sabatier University. Markers were put on the feet and knees and were tracked with an accuracy of a few mm, and with a time frequency of 100 measurements per second.

A large collection of video material of pedestrian crowds have been used as a test bed for evaluating and calibrating pedestrian models.
)/exp()( Bdd
dAtf
Model
Videos
Brutus cluster at ETHZurich
Evaluation and calibration results
A large collection of video material of pedestrian crowds have been used as a test bed for evaluating and calibrating pedestrian models.

.Substitution: A pedestrian from the empirical trajectory data is replaced by a simulated pedestrian.
Error: The deviation of the simulated position to the position in the data gives an error measure.
Optimization: This error measure is used by an optimization procedure in order to find model parameters that minimize the error.
.

1111
Calibration results

Validation on dense crowds
In this chart of density as function of time and space we can clearly see the
emerging stop-and-go waves.

1313
Validation on dense crowds
In this chart of density as function of time and space we can clearly see the emerging stop-and-go waves.
Gas-kineticpressure
as a function of (a) time, and (b) space.
)(Var)()( VttP t

Validation on dense crowds
Kaaba, Grand Mosque, Saudi
Arabia, 47,000 pedestrians