Embed Size (px)
Citation preview
Chapter-4
CLASSIFICATION USING NEURAL
NETWORK
4.1 IntroductionClassification is one of the most active research and application
area of neural networks. Neural Networks are considered a robust classifier. This chapter summarizes some of the most important developments of neural network in pattern classification and specifically, the Pattern Classification using the polynomial neural network.
The field of Neural Networks has arisen from diverse sources, ranging from the fascination of mankind with understanding and emulating the human brain, to broader issues of copying human abilities such as Classification, it is one of the most frequently encountered decision making tasks of human activity. Classification is an essential feature to separate large datasets into classes for the purpose of Rule generation, Decision Making, Pattern recognition, Dimensionality Reduction, Data Mining etc. The Neural networks have emerged as an important tool for classification.
The recent vast research activities in classification have established that neural networks are a promising alternative to various conventional classification methods. The advantage of neural networks lies in the following theoretical aspects. First, neural networks are data driven self-adaptive methods in that they can adjust themselves to the data without any explicit specification of functional or distributional form for the underlying model. Second, they are universal functional approximators in that neural networks can approximate any function with arbitrary accuracy [42], [77], [78]. Since any classification procedure seeks a functional relationship between the group membership and the attributes of the object, accurate identification of this underlying function is doubtlessly important. Third, neural networks have shown extremely good nonlinear input-output mapping, which makes them flexible in
modeling real world complex relationships. Fourth, neural networks are able to estimate the posterior probability, which provides the basis for establishing classification rule and performing statistical analysis [171]. Finally, neural network is able to work parallel with input variables and consequently handle large sets of data swiftly. The principal strength with the network is its ability to extract the patterns and irregularities as well as detecting multi-dimensional non-linear connections in data. The latter quality is extremely useful for modeling dynamical systems, e.g. the stock market, meteorological department apart from that, neural networks are frequently used for pattern recognition tasks and non-linear regression [19]. Although significant progress has been made in classification related areas of neural networks, a number of issues in applying neural networks still remain to be solved successfully or completely. This chapter provides a quintessence of the most important advances of neural networks in classification and detail description of polynomial neural network. For a good introductory text, see Hertz et al. [73] and Wasserman [220].
4.2 Fundamentals of Biological Neural Network
The term neural network inspired from the functioning of the human brain. It’s adopted simplified models of biological neural network [4]. The biological neural network consists of nerve cells (neurons) as in Figure-4.1. The cell body of the neuron, which includes the neuron’s nucleus, is where most of the neural 'computation' takes place. Neural activity passes from one neuron to another in terms of electrical triggers which travel from one cell to the other down the neuron’s axon, by means of an electrochemical process of voltage-gated ion exchange along the axon and of diffusion of neurotransmitter molecules through the membrane over the synaptic gap. The axon can be viewed as a connection wire. However, the mechanism of signal flow is
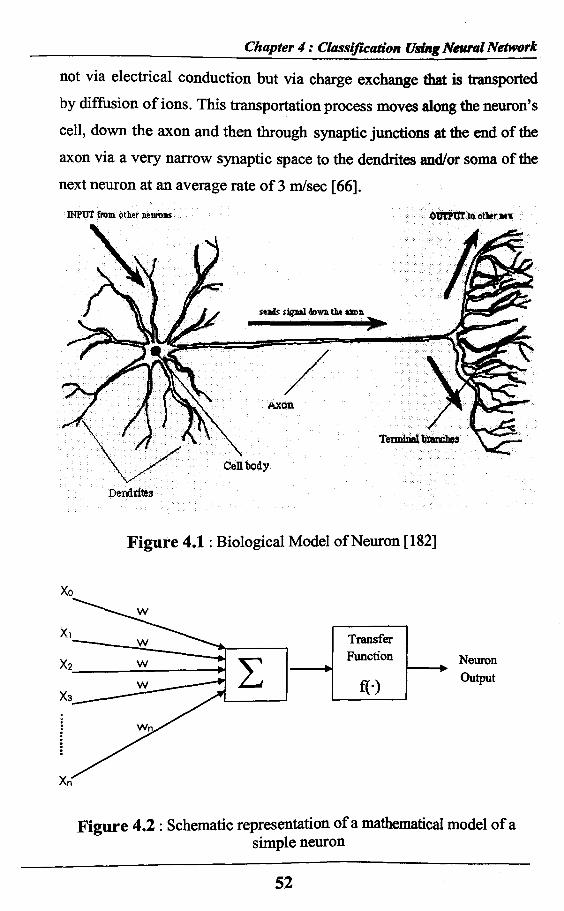
not via electrical conduction but via charge exchange that is transported by diffusion of ions. This transportation process moves along the neuron’s cell, down the axon and then through synaptic junctions at the end of the axon via a very narrow synaptic space to the dendrites and/or soma of the next neuron at an average rate of 3 m/sec [66].
INPUT from otluer neurons O tffPBT to o tlu r m
Figure 4.1: Biological Model of Neuron [182]
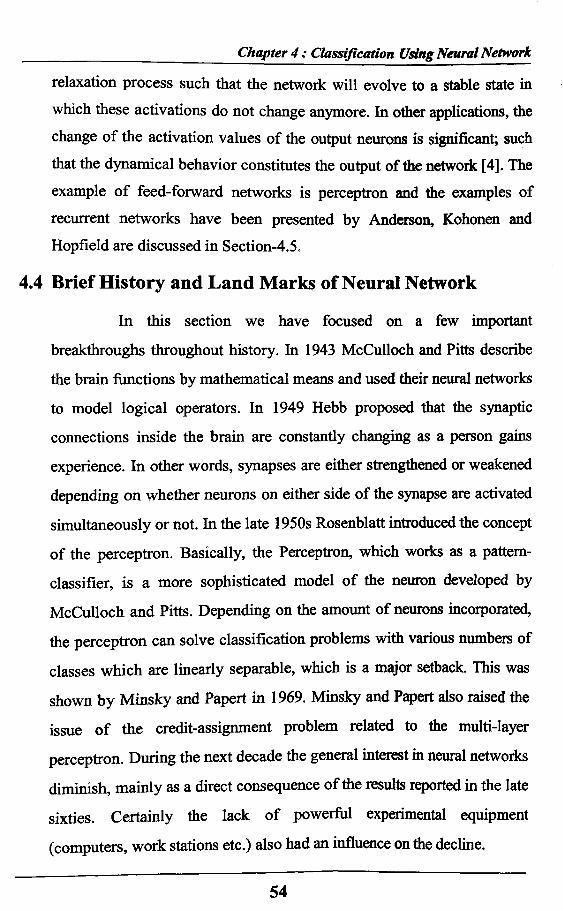
Xo
NeuronOutput
Figure 4.2 : Schematic representation of a mathematical model of asimple neuron
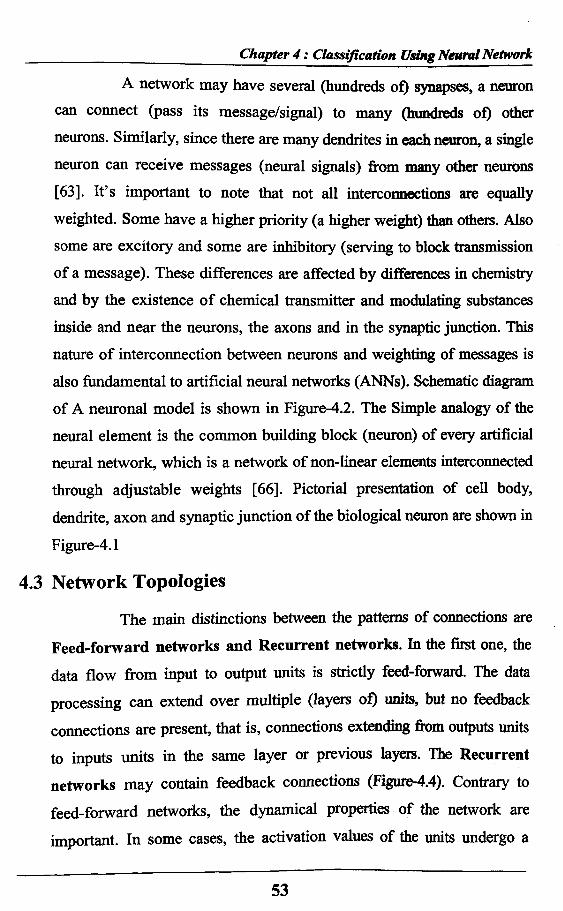
A network may have several (hundreds of) synapses, a neuron can connect (pass its message/signal) to many (hundreds of) other neurons. Similarly, since there are many dendrites in each neuron, a single neuron can receive messages (neural signals) from many other neurons [63]. It’s important to note that not all interconnections are equally weighted. Some have a higher priority (a higher weight) than others. Also some are excitory and some are inhibitory (serving to block transmission of a message). These differences are affected by differences in chemistry and by the existence of chemical transmitter and modulating substances inside and near the neurons, the axons and in the synaptic junction. This nature of interconnection between neurons and weighting of messages is also fundamental to artificial neural networks (ANNs). Schematic diagram of A neuronal model is shown in Figure-4.2. The Simple analogy of the neural element is the common building block (neuron) of every artificial neural network, which is a network of non-linear elements interconnected through adjustable weights [66]. Pictorial presentation of cell body, dendrite, axon and synaptic junction of the biological neuron are shown in
Figure-4.1
4.3 Network Topologies
The main distinctions between the patterns of connections are Feed-forward networks and Recurrent networks. In the first one, the data flow from input to output units is strictly feed-forward. The data processing can extend over multiple (layers of) units, but no feedback connections are present, that is, connections extending from outputs units to inputs units in the same layer or previous layers. The Recurrent networks may contain feedback connections (Figure-4.4). Contrary to feed-forward networks, the dynamical properties of the network are important. In some cases, the activation values of the units undergo a
relaxation process such that the network will evolve to a stable state in which these activations do not change anymore. In other applications, the change of the activation values of the output neurons is significant; such that the dynamical behavior constitutes the output of the network [4]. The example of feed-forward networks is perceptron and the examples of recurrent networks have been presented by Anderson, Kohonen and Hopfield are discussed in Section-4.5.
4.4 Brief History and Land Marks of Neural Network
In this section we have focused on a few important
breakthroughs throughout history. In 1943 McCulloch and Pitts describe
the brain functions by mathematical means and used their neural networks
to model logical operators. In 1949 Hebb proposed that the synaptic
connections inside the brain are constantly changing as a person gains
experience. In other words, synapses are either strengthened or weakened
depending on whether neurons on either side of the synapse are activated
simultaneously or not. In the late 1950s Rosenblatt introduced the concept
of the perceptron. Basically, the Perceptron, which works as a pattem-
classifier, is a more sophisticated model of the neuron developed by
McCulloch and Pitts. Depending on the amount of neurons incorporated,
the perceptron can solve classification problems with various numbers of
classes which are linearly separable, which is a major setback. This was
shown by Minsky and Papert in 1969. Minsky and Papert also raised the
issue of the credit-assignment problem related to the multi-layer
perceptron. During the next decade the general interest in neural networks
diminish mainly as a direct consequence of the results reported in the late
sixties. Certainly the lack of powerful experimental equipment
(computers, work stations etc.) also had an influence on the decline.
The interest in neural networks is renewed in 1982 when Kohonen introduced the Self Organizing Map (SOM). SOM use an unsupervised learning algorithm for applications in specifically data mining, image processing and visualization. As a basic description one can say that high-dimensional data is transformed and organized in a lowdimensional output space. The same year Hopfield built a bridge between neural computing and physics. A Hopfield network (which consists of symmetric synaptic connections and multiple feedback loops) which is initialized with random weights eventually reaches a final state of stability. From a physicists point of view a Hopfield network corresponds to a dynamical system falling into a state of minimal energy.
In 1984 the Boltzmann machine was invented by Ludwig
Boltzmann. This neural network utilizes a stochastic learning algorithm
based on properties of the Boltzmann distribution.
Rummelhart, Hinton and Williams, who discovered the
backpropagation algorithm in 1986, proved crucial step for the revival of
neural networks. Rummelhart, Hinton and Williams got the credit but it
showed that Werbos already in 1974 had introduced the error
backpropagation in his PhD thesis. This learning algorithm is
unchallenged as the most influential learning algorithm for training of
multi-layer perceptrons.
The Radial-Basis Function (RBF) was brought forward by Broomhead and Lowe in 1988. The RBF netwoik emerged as an alternative to the multi-layer perception in the search of a solution to the multivariate interpolation problem. By using a set of symmetric non-linear functions in the hidden units of a neural network new properties could be explored. Work by Moody and Darken (presented in 1989) on how to
estimate parameters in the basis functions has contributed significantly to the theory.
One of the first approaches of systematic design of nonlinear relationships comes under the name of a Group Method of Data Handling (GMDH) which was proposed in the late 1960s by Ivakhnenko. The GMDH algorithm generates an optimal structure of the model through successive generations of partial descriptions (PDs) of data being regarded as quadratic regression polynomials with two input variables. It’s identifying the nonlinear relations between input and output variables. In late 1990 this method is improved as Polynomial Neural Network. It was proposed to alleviate the problems associated with the GMDH.
4.5 Architecture of Neural Network
It is useful to make a distinction between different neural network architectures based on the way in which the network is trained and classify the patterns. Such a distinction dictates the approach to a problem at a fundamental level. The Neural Network techniques can be divided into supervised, unsupervised and reinforced techniques. In this study we will concentrate on supervised and unsupervised only.
4.5.1 Supervised Neural Network
The neural network is given the target outputs on to which it should map its inputs, i.e. it is given in paired data of input and output. The error arising from the discrepancy between the network output and the target is used to optimize the network parameters. Once the network has been trained, it is used to produce an output for unseen data.
The neurons are arranged in a layer fashion is referred to as a perceptron. Perceptrons are trained in a supervised learning fashion. This means that one tries to train the net to perform specific, known functions
[147]. We have a target test set where the outputs are known, which is used to train the net
The Widrow-Hoff (gradient descent or Delta rale) is the
most widely known supervised learning rule. The general procedure for working with a perceptron layer is to first initialize the network as
described with random weights and biases. Usually the random numbers
are kept small, and symmetrical about zero. Then an input vector is applied to the net, which generates an output. Since the net has just been
initialized, the output is generally incorrect,” that is to say, not equal to
the training target vector. The learning rule is then applied to the layer. A
simple learning rule which is widely used is called the Widrow-HofF rule
[226]:
A = d { t ) - y ( t )
Wi{t + \) = Wi{t) + v^Xi{t)
+ 1, i f input is classA 0, i f input is classB
Where 0 < 77 < 1, positive gain function. When the output is 0
then Class will be A; when the output is 1 then Class will be B [19].
This rule specifies a simple method of updating each weight. It tries to minimize the error between the target output d(t) and the
experimentally obtained output y(t) for each neuron by calculating the
error and calling it a “delta” (A). Each weight (W) is then adjusted by adding to delta multiplied by some attenuation constant 77 (Learning
Rate). This process is then iterated until the net error falls below some
threshold.
By adding its specific error to each of the weights, we are ensured that the network is being moved towards the position of minimum
error and by using attenuation constant, rather than the foil value of the error, we move it slowly towards this position of minimnm error. When correctly trained, the perceptron exhibits some highly promising behavior. The descriptions of Different models based on the perceptron are given below.
(a) Single Layer Perceptron
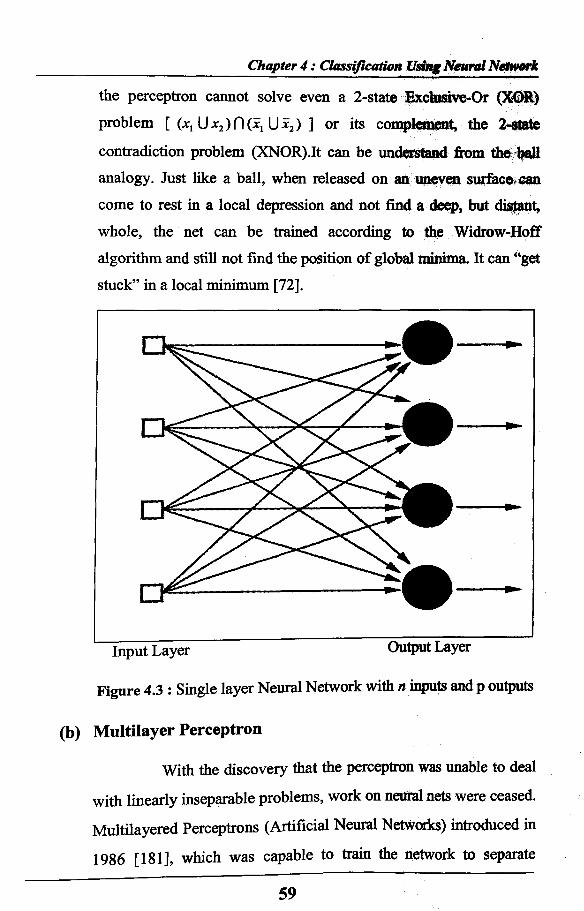
The perceptron’s learning theorem was formulated by Rosenblatt in 1961. The theorem states that a perceptron can learn (solve) anything it can represent (simulate). A single layer perceptron as shown in Figure-4.3 is able to learn to classify objects according to their position in n-dimensional hyperspace defined by the n inputs (Not interconnected) where the problem can be reduced to a linear separable (classification) problem [108].
When perceptrons were first introduced, they seemed revolutionary. It was a mathematical model of a structure which could be taught to classify points in hyperspace, not according to rules, but by being shown which points belonged in which sets. This freed humans from the necessity of determining rules by which the points should be classified. It was thought that they could be trained to solve any problem which could be set up as a classification problem in hyperspace.
In 1969, Minsky and Papert published a book where they pointed out as did E. B. Crane in 1965 in a less-known book, to the grave limitations in the capabilities of the perceptron, as is evident by its representation theorem. They have shown that, for example,
the perceptron cannot solve even a 2-state Exctusive-Or (XGR) problem [ (*, U*2) ] or its complement, the 2-state
contradiction problem (XNOR).It can be understand from the ball analogy. Just like a ball, when released on an uneven surfacecan come to rest in a local depression and not find a deep, but distant, whole, the net can be trained according to the Widrow-Hoff algorithm and still not find the position of global minima. It can “get stuck” in a local minimum [72].
Input Layer Output Layer
Figure 4.3 : Single layer Neural Network with n inputs and p outputs
(b) Multilayer Perceptron
With the discovery that the perceptron was unable to deal
with linearly inseparable problems, work on neural nets were ceased.
Multilayered Perceptrons (Artificial Neural Networks) introduced in
1986 [181], which was capable to train the network to separate
linearly inseparable data. It consists of large number of units
(neurons) joined together in a pattern of connections (Figure-4.5).
Units in a neural net are usually segregated into three classes: input
units, which receive information to be processed; output units, where
the results of the processing are found; and units in between known
as hidden units. There are various models defined based on
Multilayer Perceptron, some of them are defined here.
(c) Feed Forward Neural Network (FFNN)
FFNNs are a kind of multilayer neural network which
allows signals to travel one way only, from input to output. First, the
network is trained on a set of paired data to determine input-output
mapping. The weights of the connections between neurons are then
fixed and the network is used to determine the classifications of a
new set of data. During classification the signal at the input units
propagates all the way through the net to determine the activation
values at all the output units. Each input unit has an activation value
that represents some feature external to the net. Then, every input
unit sends its activation value to each of the hidden units to which it
is connected. Each of these hidden units calculates its own activation
value and this signal are then passed on to output units. The
activation value for each receiving unit is calculated according to a
simple activation function. The function sums together the
contributions of all sending units, where the contribution of a unit is
defined as the weight of the connection between the sending and
receiving units multiplied by the sending unit's activation value. This
sum is usually then further modified, for example, by adjusting the
activation sum to a value between 0 and 1 and/or by setting the
activation value to zero unless a threshold level for that sum is
reached.
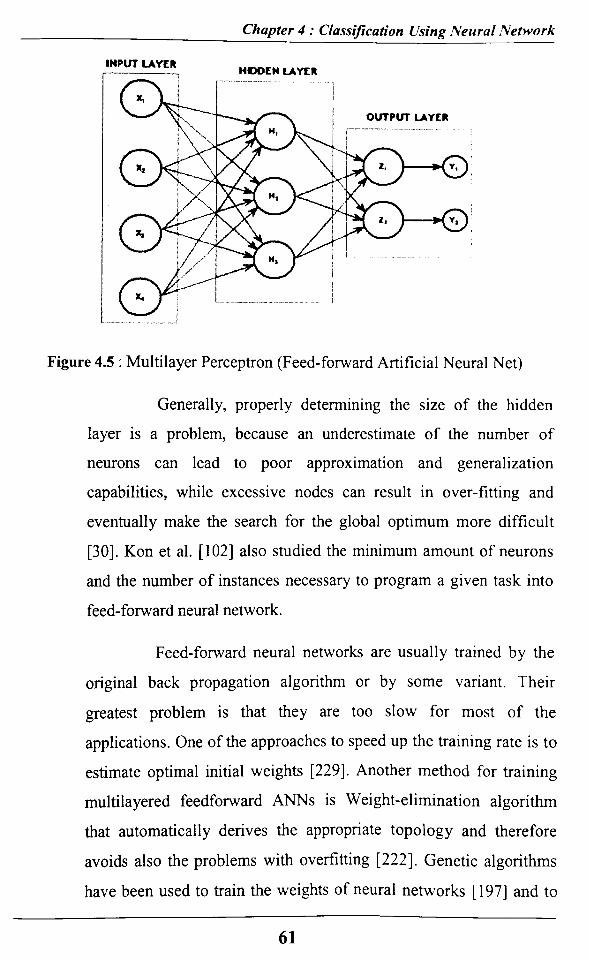
Figure 4.5 : Multilayer Perceptron (Feed-forward Artificial Neural Net)
Generally, properly determining the size of the hidden
layer is a problem, because an underestimate of the number of
neurons can lead to poor approximation and generalization
capabilities, while excessive nodes can result in over-fitting and
eventually make the search for the global optimum more difficult
[30]. Kon et al. [102] also studied the minimum amount of neurons
and the number of instances necessary to program a given task into
feed-forward neural network.
Feed-forward neural networks are usually trained by the
original back propagation algorithm or by some variant. Their
greatest problem is that they are too slow for most of the
applications. One of the approaches to speed up the training rate is to
estimate optimal initial weights [229]. Another method for training
multilayered feedforward ANNs is Weight-elimination algorithm
that automatically derives the appropriate topology and therefore
avoids also the problems with overfitting [222], Genetic algorithms
have been used to train the weights of neural networks [197] and to
find the architecture of neural networks [269]. There are also Bayesian methods in existence which attempt to train neural networks [217]. A number of other techniques have emerged recently which attempt to improve Artificial Neural Nets training algorithms by changing the architecture of the networks as training proceeds. These techniques include pruning useless nodes or weights [32], and constructive algorithms, where extra nodes are added as required [157].
(d) Back Propagation (BP)
BP algorithm is used for training artificial neural networks [229]. Training is usually carried out by iterative updating of weights based on the error signal. The negative gradient of a mean-squared error function is commonly used. In the output layer, the error signal is the difference between the desired and actual output values, multiplied by the slope of a sigmoidal activation function. Then the error signal is back-propagated to the lower layers. BP is a descent algorithm, which attempts to minimize the error at the each iteration. The weights of the network are adjusted by the algorithm such that the error is decreased along a decent direction. Traditionally, two parameters, called learning rate and momentum factor, are used for controlling the weight adjustment along the descent direction and for
dampening oscillations.
The BP algorithm is used for many applications. However, its convergence rate is relatively slow, especially for networks with more than one hidden layer. The reason for this is the saturation behavior of the activation function used for the hidden and output layers. Since the output of a unit exists in the saturation area, the
corresponding descent gradient takes a very small value, even if the output error is large, leading to very little progress in the weight adjustment. The selection of the learning rate and momentum factor is arbitrary, because the error surface usually consists of many flat and steep regions and behaves differently from application to application. Large values of the learning rate and momentum factor are helpful to accelerate learning. However, this increases the possibility of the weight search jumping over steep regions and moving out of the desired regions.
In training by back-propagation algorithm, the target
values of the neuron’s output are set to 1 or 0 but there are no target
values for the hidden neuron’s output. Thus the training is not
efficient. To overcome from this problem several approaches are
developed to train the network layer by layer using [57], [117],
[178], [212], [213], [218], [219], each layer is trained layer by layer
using, as the objective function for each layer, the objective function
for the discriminant analysis that maximizes the between class scatter
while keeping the within class scatter constant. In Wang and Chan
[219] the weights between output and hidden layers and the output of
the previous layers are determined by minimizing the sum of squared
errors. Then the calculated outputs are used as a desired output of the
hidden neurons. This method can be used both for pattern
classification and function approximation [2].
INPUT LAYER
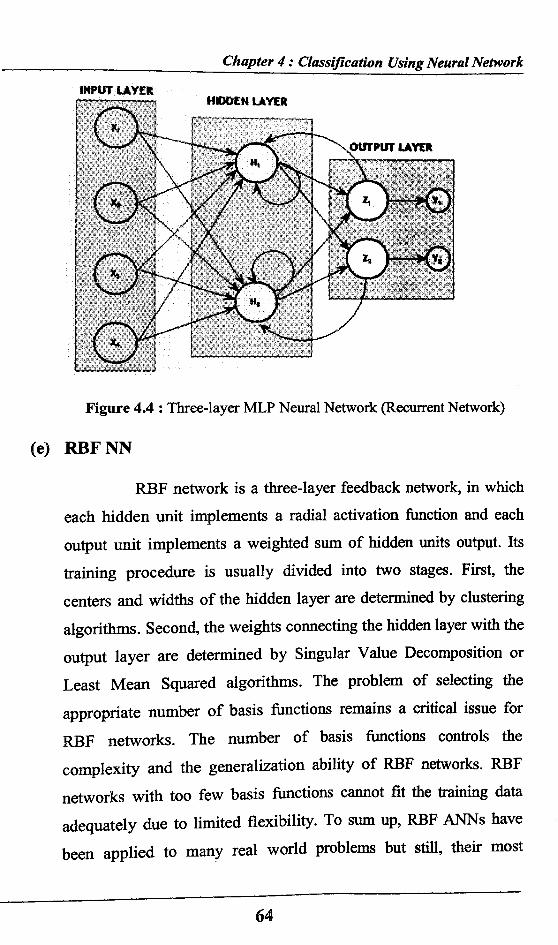
Figure 4.4 : Three-layer MLP Neural Network (Recurrent Network)
(e) RBF NN
RBF network is a three-layer feedback network, in which each hidden unit implements a radial activation function and each output un it implements a weighted sum of hidden units output. Its training procedure is usually divided into two stages. First, the centers and widths of the hidden layer are determined by clustering algorithms. Second, the weights connecting the hidden layer with the output layer are determined by Singular Value Decomposition or Least Mean Squared algorithms. The problem of selecting the appropriate number of basis functions remains a critical issue for RBF networks. The number of basis functions controls the complexity and the generalization ability of RBF networks. RBF networks with too few basis functions cannot fit the training data adequately due to limited flexibility. To sum up, RBF ANNs have been applied to many real world problems but still, their most
striking disadvantage is their lack of ability to reason about their output in a way that can be effectively communicated. For this reason many researchers have tried to address the issue of improving
the comprehensibility of neural networks, where the most attractive solution is to extract symbolic rules from trained neural networks. Setiono and Leow [119] divided the activation values of relevant hidden units into two subintervals and then found the set of relevant connections of those relevant units to construct rules. They are trying to make the network architecture flexible and optimized. Radial Basis Function (RBF) networks have been also widely applied in many sciences and engineering fields [173], [236].
(e) Group Method Data Handling (GMDH)
Prof. A. G. Ivakhnenko in the late 1960s developed Group
Method Data Handling (GMDH) as a means for identifying
nonlinear relations between input and output variables. As described
in [227] the GMDH generates successive layers with complex links
that are individual terms of a polynomial equation. GMDH offers
several advantages over conventional Feedback Neural Networks.
Since it allows a second-order method of convergence to its memory
locations, it approaches equilibrium rapidly. The memories of this
network can be located anywhere in an n-dimensional space rather
than being confined to the comers of a hypercube, as is the case with
Hopfield network and other networks which uses sigmoidal or
similar nonlinearities. The GMDH algorithms better epitomize the
biological complex neurons which are self organized. Only by this
self-organizing method can optimal non-physical models be found
for small, inaccurate or noisy data samples. Non-physical models
usually have a higher accuracy and a simpler model structure than
physical models. In a neuronet with such neurons, we will have a
twofold multilayered structure: neurons themselves are multilayered
and they will be united in a multilayered way into common matrix
[172]. GMDH algorithms are examples of complex active neurons,
because they choose the effective inputs and corresponding
coeficients by themselves during the process of self-organization.
The GMDH is improved as Polynomial Neural Network (PNN)
[146], [149] for classification purposes.
4.5.2 Unsupervised Neural Network
This is used when we have impaired data and we want to find
groupings within the data heuristically. Therefore there is no input output
function to map, as there are no targets. Unsupervised learning produces
groupings of the data based solely on the correlations in the data, and not
on associations with external parameters (the targets in the supervised
case). The Hebbian rule is the most widely known unsupervised learning
rule; it is based on work by the Canadian neuro-psychologist Donald
Hebb, who theorized that neuronal learning (i.e., synaptic change), which
is a local phenomenon which can be express in terms of the temporal
correlation between the activation values of neurons. Specifically, the
synaptic change depends on both pre-synaptic and post-synaptic activities
and states that the change in a synaptic weight is a function of the
temporal correlation between the pre-synaptic and postsynaptic activities.
The value of the synaptic weight between two neurons increases whenever
they are in the same state and decreases when they are in different states.
Unsupervised classification methods could be useful in spotting natural
___________________________________________________________ Chapter 4 : Classification Using Neural Network
groupings within a dataset when we have little knowledge of what the
groupings could be. Examples of unsupervised networks include
Kohonens Self-Organizing Map[100], the Bayesian Auto Class system of
Cheese man [270] and the Adaptive Resonance Theory (ART) [271]. For
example an unsupervised neural Network, the Kohanen’s Self Organizing Map is given below.
Kohonen Neural Network
The Self-Organizing Map [99] is a very popular artificial
neural network (ANN) algorithm based on unsupervised learning. The
SOM is used in various data mining, Pattern Recognition etc tasks. It
provides several very beneficial properties, like vector quantization and
projection. The network consists of output units, typically arranged in a
two-dimensional plane, with weights between each unit and input units.
When an input vector is fed to the network, only one output unit, which
has the best-matching weight i.e. the weight vector is the closest to the
input vector, is selected as a 'winner1. After learning, units in the network
have modified weights such that neighboring units have similar weight
vectors. Hence similar inputs are linked with winner units that are located
close to each other, while winner units for different inputs are located far
away in the network. Thus the feature map is created and inputs to the
network are automatically classified on the map. The advantage of the
feature map is that the weight of each output unit directly shows a
corresponding input vector itself. The main property of the Kohonen
network is the unsupervised learning. That permits to divide the input
vectors set in clusters without prior knowledge about their similarities.
_______________________________________________ ___________________ Chapter 4 : Classification Using Neural Network
4.6 PNN for Pattern Classification
PNN is a flexible neural architecture whose topology is not predetermined or fixed like a conventional ANN but grown through learning layer by layer. The design is based on GMDH which was invented by Prof. A. G. Ivakhnenko in the late 1960s [80], [81], [146], [149]. He developed GMDH as a means for identifying nonlinear relations between input and output variables. As described in [148], the GMDH generates successive layers with complex links that are individual terms of a polynomial equation. The individual terms generated in the layers are partial descriptions (PDs) of data being the quadratic regression polynomials as shown in Figure-3.1 and 4.7 of a basic PNN model and building blocks with all inputs. The first layer is created by computing regressions of the input variables and choosing the best ones for survival. The second layer is created by computing regressions of the values in the previous layer along with the input variables and retaining the best candidates. More layers are built until the network stops getting better based on termination criteria. The selection criterion used in this study penalizes the model that become too complex to prevent overtraining.
In a feed-forward neural network (FNN) [156] to achieve high
classification accuracy, one has to provide in advance, a well defined
structure of FNN, such as, the number of input nodes, hidden and output
neurons, and assume a proper set of relevant features. To alleviate this
drawback of ANN; PNN can be used for classification purposes. Using
this approach during learning, the PNN model generates the new
population of neurons and the number of layers and the complexity of the
network increases [138], [139] until a predefined criterion is met. Such
models can be comprehensively described by a set of short-term
polynomials thereby developing a PNN classifier. Coefficients of PNN
can be estimated by least square fitting. The network architecture grows
depending on the number of input features, PNN model selected, number
of layer required, and the number of PD’s preserved in each layer.
The GMDH belongs to a kind of inductive self-organization
data driven approach. It requires small data samples which are able to
optimize the structure of the models objectively and this relationship
between input-output variables can be well approximated by Volterra
functional series, the discrete form of which is Kolmogorov-Gabor
polynomial [81].
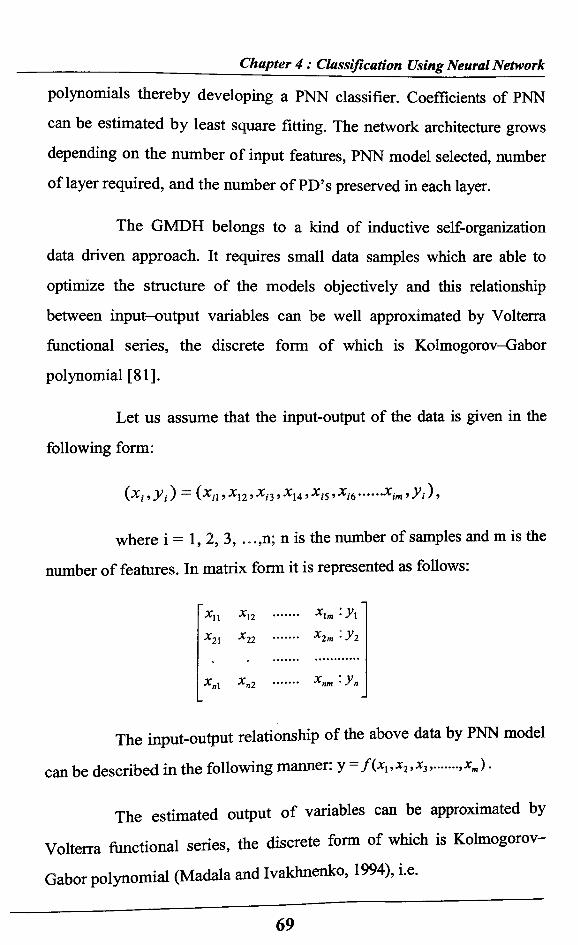
Let us assume that the input-output of the data is given in the
following form:
( X i i ) = ( * , 1 5 X 12 ’ X i3 ’ * 1 4 ’ X iS ’ X i 6 ...........X im ’ -V i ) 5
where i = 1, 2, 3, ...,n; n is the number of samples and m is the
number of features. In matrix form it is represented as follows:
**il 1̂2 ..... X\m * y 1■̂21 '̂ '22 ..... X2m ' y2
Xnl Xn2 ..... Xnm ' ̂ n
The input-output relationship of the above data by PNN model
can be described in the following manner: y =f(xl,x2,xJ,..... ,xm) .
The estimated output o f variables can be approximated by
Volterra functional series, the discrete form of which is Kolmogorov-
Gabor polynomial (Madala and Ivakhnenko, 1994), i.e.
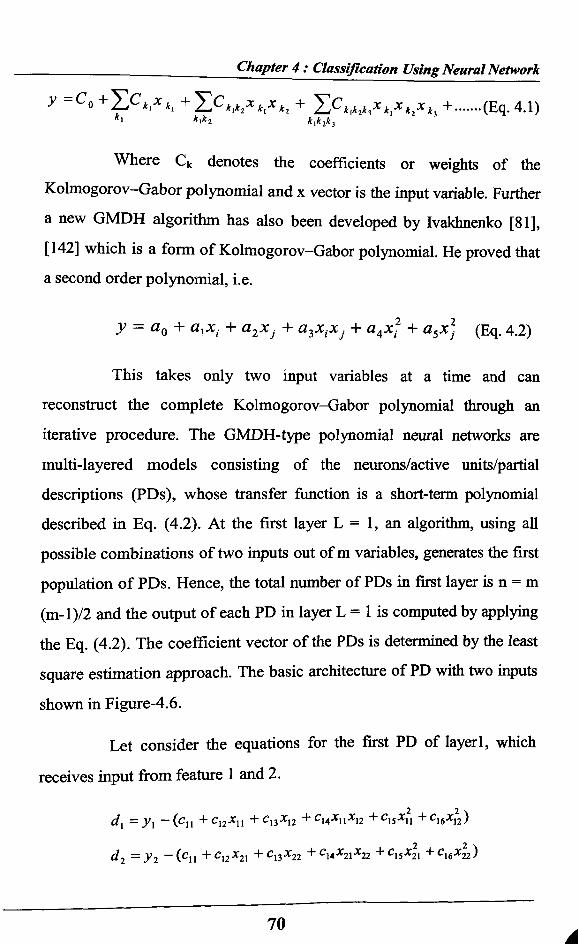
y - Co +'LCk x ki + ' £ c kikx i x k2 + Y,Ckxkikx k x k x k̂ + ..... (Eq. 4.1)k xk
Where denotes the coefficients or weights of the
Kolmogorov—Gabor polynomial and x vector is the input variable. Further
a new GMDH algorithm has also been developed by Ivakhnenko [81],
[142] which is a form of Kolmogorov—Gabor polynomial. He proved that a second order polynomial, i.e.
y = a 0 + alx i + a2Xj + a3x,xj + a 4x,2 + a5x ] (Eq. 4.2)
This takes only two input variables at a time and can
reconstruct the complete Kolmogorov-Gabor polynomial through an
iterative procedure. The GMDH-type polynomial neural networks are
multi-layered models consisting of the neurons/active units/partial
descriptions (PDs), whose transfer function is a short-term polynomial
described in Eq. (4.2). At the first layer L = 1, an algorithm, using all
possible combinations of two inputs out of m variables, generates the first
population of PDs. Hence, the total number of PDs in first layer is n = m
(m-l)/2 and the output of each PD in layer L = 1 is computed by applying
the Eq. (4.2). The coefficient vector of the PDs is determined by the least
square estimation approach. The basic architecture of PD with two inputs
shown in Figure-4.6.
Let consider the equations for the first PD of layerl, which
receives input from feature 1 and 2.
d l = y l — ( C n + Cn X n + ^ 1 3 - ^ 1 2 + £14*1 1 * 1 2 + C 15X U + C 1 6 * 1 2 )
d2 = J 2 — (Cll + C 12X 21 + C 13X 22 + C 1 4 * 2 1 * 2 2 + C 15*21 + C 1 6 * 2 2 )
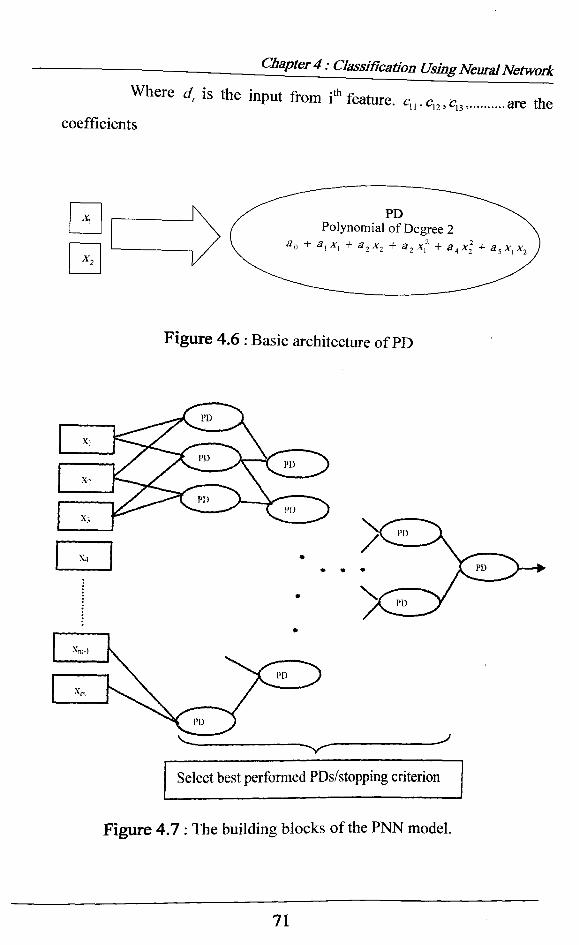
Where d, is the input from i* feature. q „c„,c13,....... are thecoefficients
Figure 4.6 : Basic architecture of PD
Select best performed PDs/stopping criterion
Figure 4.7 : The building blocks of the PNN model.
Let us consider the general equation for the first PD in differentlayers i.e.
where 1 < j < k, k = — ——, ancNi, 1 < i < n and the equation for the least
square fit is
U = d? +dl + .........+ d 2n
After obtaining the values of all the coefficients using least square estimation based on the training dataset we can estimate the targetas:
$ 1 = (C,l + C j l X ip + C p X iq + C j 4 X ipX iq + c j 5 x ?P + CJ6X l )
If the error level is not up to our desired value, we construct next layer of PNN by taking the output of the previous layer
and apply the same procedure.
dt = y t — (Cyi + C j 2 Z ip + C j 3 Z iq C j A Z ipZ iq + C j 5 Z ip + C j 6 Z i q )
This process is repeated till error decreases.
4.6.1 Algorithm of PNN
The algorithm of PNN is described as the following sequence of
steps:
1. Determine the system’s input variables and if needed carry out the
normalization of input data.
____________________________ ____________ __ ________________Chapter 4 : Classification Using Neural Network
2. Partition the given samples into training and testing samples. The input-output dataset is divided into two parts: training and test part. The training part is denoted as TR and the test part is denoted as TS. Let the total number of samples be n. Then, obviously, we can write n = TR + TS. Using the training part we construct the PNN model (including an estimation of coefficients of the PDs of every layer of PNN) and test data are used to evaluate the estimated PNN.
3. Select a structure of the PNN. The structure of the PNN is selected based on the number of input variables and the order of PDs in each layer. The PNN structures can be categorised into two types, namely, a basic PNN and a modified PNN. In the case of basic PNN the number of the input variables of PDs is the same in every layer, whereas in modified PNN the number of input variables of PDs varies from layer to layer.
4. Determine new input variable and the order of the polynomial form ing a partial a partial description (PD) of the data. If there is m
ml/input variables then total number of PDs will be / r'(m~r) nodes,
where r is the number of chosen input variables.
5. Estimate the coefficient of the PD. The vector of coefficients
a = (aQ, ax, a2, a3, a4, a5) derived by m inim izing the mean squared
error between y t and^,,
| TR
Where
yji= Oq +alXp +a1Xq +a4 ^ +aSXpXq ^-P ’(l - r>1>j = ̂ 2 .... ; 2
_______________________.__________________________ Chapter 4 : Classification Using Neural Network
In order to find out the coefficients, we need to minimise the error criterion E. Differentiating E with respect to all the coefficients, we get the set of linear equations. In matrix form we can write as
Y = X.A
Equivalently
X t .Y = X t.X.A =>A = ( X tX ) X t .Y
This procedure is implemented repeatedly for all nodes of the layer and also for all layers of PNN starting from the input layer and moving towards the output layer. Further the following simple algorithms can find out the index of the input features for each PD.
1. Let the number of layers be 1.
2. Let k = 1,
3. FOR i = 1 t o m - 1
4. FOR j = i + 1 to m
5. Then PDk receives input from the features
6. p = i ;andq=j ;
7. k = k + 1;
8. END FOR
9. END FOR
Select PDs with best predictive capability. Each PD is
estimated and evaluated using both the training and testing data sets.
6. Select PDs with the best classification accuracy: The PDs which give the best predictive performance will be chosen for the output variable. Normally a pre specified cutoff value of the performance for all PDs is specified. If the performance of the PD is above the pre specified cutoff value then only they will be remain in the next generation.
7. Check the Stopping Criterion.
7.1 The following stopping condition indicates that an optimal PNN model has been accomplished at the previous layer, and the modeling can be terminated. This condition reads as Ec > Ep, where Ec is a minimal identification error of the current layer and Ep denotes a minimal identification error that occurred at the previous layer
7.2 The PNN algorithm terminates when the number of iterations (predetermined by the designer) is reached. When setting up a stopping (termination) criterion, one should be prudent in achieving a balance between model accuracy and an overall computational complexity associated with the development of
the model.
8. Determine new input variables for the next layer.
If any of the above two criteria fails, then the model will be
expand to the next layer.
4.7 Neural Network Techniques in Pattern Classification -
A Review
Data classification [54], [119], [140] is a core issue in data mining, pattern recognition and forecasting. The goal of classification is to
assign a new object to a class from a given set of predefined classes based on the attribute values of the object. Furthermore, classification is based on some discovered model, which forms an important piece of knowledge about the application domain. There has been wide range of methods for classification task. One of the popular and widely used techniques is artificial neural network (ANN) [156]. The main idea behind an Artificial Neural Network is to use several simple computational units, connected by weighted links through which activation values are transmitted. The units normally have a very simple way to calculate new activation values given the values received through the connections, for example summ ing
their inputs and feeding it through a monotonous transfer function. In a classification task, the pattern which is to classify is typically fed into the network as activation of a set of input units. This activation is then spread through the network via the connections, finally resulting in activation of the output units, which is then interpreted as the classification result. Training of the network consists in showing the patterns of the training set to the network, and letting it adjust its connection weights to obtain the
correct output.
There are a large number of different neural network architectures. One of the most popular neural network architectures used for classification is the Multi-Layer Perceptron. The units are organized into different layers, and the network is said to be feed-forward because the activation values propagate in one direction only, from the units in the input layer, through a number of hidden layers, to end up in the output layer. The multi-layer perceptron is usually trained with the Error Back-
Propagation method [183].
Worth mentioning here is the Single Layer Perceptron which
is a simple perceptron [176] which preceded the multi-layer perceptron.
The original perceptron actually had what could be considered as a hidden
layer of randomly selected “higher order units”. The single layer
perceptron is perhaps more similar in structure to the Adaline [225]. The
single layer of weights between input and output units is trained, just as in
the multi-layer case, with a gradient descent method, which adjusts the
weights a small step in the direction which will make the classification of
the current pattern more correct. The reason to mention this network is
mainly because of its limitations [135] pointed out what could and could
not be done with this simple type of architecture. Since each output unit
can only perform a vector multiplication of the input vector with its
weight vector and feed this through a monotonous transfer function, the
decision boundary between any pair of output units will always be a linear
hyper plane in the input space. This means that it can only solve
classification tasks where the classes are linearly separable. The duo [135]
gave several examples of interesting tasks which have more complex
decision boundaries, and thus can not be solved with this simple
architecture regardless of what method is used to set the weights. These
limitations can be overcome for instance by using one or more hidden
layers in the network.
The idea behind the error back-propagation neural networks
is very different from the other classification methods. Rather than trying
to calculate a probability or similarity or truth value directly, they use
more of an error correcting strategy: start with random weights and adjust
them to make the results better. Still, under certain conditions the output
activities of a multi-layer perceptron, trained with error back-propagation,
can be shown to approach the conditional probabilities of the
corresponding classes [171]. This relates these neural networks to the
statistical methods. The above networks all use supervised training
methods, where the correct class label has to be given when updating the
weights. There is another kind of training called reinforcement learning
[17], in which only a global signal indicating if the answer was wrong or
right is given. This is sometimes useful when e. g. learning to play a
game, and it is only possible to know if a whole sequence of moves was
good or bad (if it lead to a win or a loss), and not exactly what should
have been done in each move [133]. To continue with some different
architecture, there is also a large group of radial basis function (RBF)
neural networks [29], [272], Whereas the units in the hidden layer of the
multi-layer perceptron each responds for inputs on one side of a hyper
plane in the input space, a unit in an RBF network responds in a radially
symmetric region of the input space. In one version there are equally
many hidden units as training samples [164], each with the center of their
radially symmetric function (typically a Gaussian function) in one of the
training samples. Although not usually considered as RBF networks,
related groups are the competitive neural networks e.g. self-organizing
maps [100], [172] and learning vector quantization [101]. Here the
units correspond to prototype patterns; codebook vectors, and responds in
relation to how close a stimulated pattern is. They are usually of the
winner-take-all type; i.e. only the most active unit wins and suppresses all
other units. This is similar to the principles used in generalized nearest
neighbor methods.
The competitive neural networks are usually trained by moving
the codebook vectors closer to the patterns they respond to, using some
scheme [100], [120], [172], Interesting is also the Competitive Selective
Learning [33] method, which includes a way to remove codebook vectors
from regions where they are too dense and add them in regions where they are too sparse.
There is another type of neural network, not primarily
associated with classification. This is the class of recurrent neural
networks, i.e. with feedback connections used to feed the outputs of units
in one layer back into the units of the same or a previous layer. Rather
than sending the pattern through the network from the input units to the
output units, the signals cycle around in the network until the activity
stabilizes. One example of this is the Hopfield Network [76]. An
important concept for Hopfield networks is the energy function, a scalar
function from the activity state of the network. During the recall phase of
the Hopfield network the activity pattern strives to attain as low energy as
possible, causing it to find local minima in the energy landscape,
corresponding to stable patterns of activity. It is possible to prove that the
network will always arrive at a stable state if the weight matrix is
symmetric, since every activity change in the network will decrease the
energy by a certain amount, and there is a minimum possible energy. The
problem of getting stuck in a local minimum, when searching for the
global m inim um , can be a severe obstacle for hill climbing methods in
general. In a neural network context it will typically come in either during
training of the weights with some gradient descent method like error back-
propagation, or during relaxation of the activities in a recurrent neural
network. One way to solve this is to use simulated annealing [97] which
is a method to add a stochastic component to the hill climbing, which
introduces a small probability of locally going in the “wrong direction”.
The amount of randomness introduced is regulated by the temperature. A
high temperature means a high probability of escaping from a local
minimum. If the temperature is initially set to a high value, and then
decreased slowly enough, the probability that the procedure will end up in
the global minimum can be made arbitrarily close to one. Unfortunately,
dependent on the task at hand, “slowly enough” may mean that it will take
exceedingly long time. A recurrent neural network which can be used for
classification tasks is the boltzmann machine [3]. It uses the concepts of
energy function and simulated annealing to represent the probability
distribution over the domain. This is done by representing the probability
distribution in the energy function, and using a dynamics which makes the
probability of a pattern of activity proportional to the represented
probability of that pattern. This type of network will eventually learn the
correct probability distribution over the domain, but both training and
recall may require prohibitively long time.
The bayesian neural network [105], [113], [114] is a network
model in which the activities of units represent probabilities. The idea is
to make the activities of the output units equal to the probabilities of the
corresponding classes given the attributes represented by the stimulated
input units. In its single-layer form it is related to the naive Bayesian
classifier; in that the key assumption is, different input attributes are
independent. The multi-layer version has a hidden layer which
compensates for dependencies between the input attributes. The kinds of
problems handled by this neural network are the same as those which can
be handled by the Bayesian belief networks or the dependency tree
method by Chow and Liu [37].
Out of all other neural network the feed forward neural
network (FNN) is one of the popular and widely used techniques [156].
Although such FNNs can learn to classify wide range of problem domain
well, the classification model cannot be comprehensible due to large
number of synaptic connections. To achieve high classification accuracy
in FNN framework, one has to provide a well defined structure of FNNs,*
such as, the number of input nodes, hidden and output neurons, and
assume a proper set of relevant features. Trial and error methodology is
used to arrive at such kind of structures, which is computationally
expensive. Similarly other methods like rule extraction and decision tree,
which provide comprehensible rule, are based on the trade-off between
the complexity and the classification accuracy of the model. Recently, a
lot of attention has been directed to advanced techniques of system
modeling. The focus of the existing methodologies and detailed
algorithms is confronted with nonlinear systems, high dimensionality of
the problems, a quest for high accuracy and generalization capabilities of
the ensuing models. Nonlinear models can address some of these issues
but they request a large amount of data. The global nonlinear behavior of
the model may also cause undesired effects (the well-known is a
phenomenon of data approximation by high order polynomials where such
approximation leads to unexpected ripples in the overall nonlinear
relationship of the model). When the complexity of the system to be
modeled increases both experimental data and some prior domain
knowledge (conveyed by the model developer) are of importance to
_____________________________ _____ ________________________Chapter 4 : Classification Using Neural Network
complete an efficient design procedure. It is also worth stressing that the
nonlinear form of the model acts as a two-edge sword: while we gain
flexibility to cope with experimental data, we are provided with an
abundance of nonlinear dependencies that need to be exploited in a systematic manner.
As compare to FNN which requires the optimized structure and
improved by trial and error methodology the group method of data
handling (GMDH) approach which is one of the first approach along
systematic design of nonlinear relationships. It was developed to
identifying nonlinear relations between input and output variables. The
GMDH [58], [81], [144], [150] algorithm generates an optimal structure
of the model through successive generations of partial descriptions (PDs)
of data being regarded as quadratic regression polynomials with two input
variables. While providing with a systematic design procedure, GMDH
has some drawbacks. First, it tends to generate quite complex polynomial
for relatively simple systems (data). Second, owing to its limited generic
structure (quadratic two variable polynomial), GMDH also tends to
produce an overly complex network (model) when it comes to highly
nonlinear systems. Third, if there are less than three input variables,
GMDH algorithm does not generate a highly versatile structure.
To alleviate the problems associated with the GMDH,
polynomial neural networks (PNN) is introduced which is useful for
classification purposes. In a nutshell, these networks come with a high
level of flexibility as each node (processing element forming a PD) can
have a different number of input variables as well as exploit a different
order of the polynomial (linear, quadratic, cubic, etc.). In comparison to
well-known neural networks whose topologies are commonly prior to all
detailed (parametric) learning, the PNN architecture is not fixed in
advance but becomes fully optimized (both structurally and
parametrically). Especially, the number of layers of the PNN architecture
can be modified with new layers added, if required. Polynomial networks
have been known in the literature for many years [31], [122], [158]. The
polynomials have powerful approximation properties [158] and excellent
properties as classifiers [31]. Because of the Weierstrass theorem,
polynomial classifiers are universal approximators to the optimal Bayes
classifier [96], [50]. The Weierstrass theorem [180] states that any
continuous function can be approximated to an arbitrary accuracy by
polynomials. The polynomial classifier is also known as higher-order
neural network [180] or functional link net [156]. With binomial
expansion on linear subspace features, the polynomial classifier has
shown superior performance to multilayer neural networks [74], [110],
[122], [196]. PNN generates layers of neurons/simulated units/partial
descriptions (PDs) and then trains and selects those neurons, which
provide the best classification. During learning the PNN model grows the
new population of neurons and the number of layers so that the
complexity of the network increases [136], [139] while a predefined
criterion is met. Due to the complex architecture it requires huge memory
and computation time. To overcome from this problem evolutionary
strategies suggested by [137], [146] where they take only one layer of
PNN model and selected an optimal set from the PD’s generated in the
first layer along with the input features using PSO technique. This optimal
set of features is fed to a single Perceptron like model of ANN. The
weights are also optimized by PSO. We have proposed a unique scheme
using GA with PNN (see Chapter-7). In this scheme GA is been used for
feature selection (see Chapter-5) and the PNN is involved to find out the
fitness of GA. This proposed scheme outperformed than other methods
such as PNN, PNN with Gradient Descent, PNN with PSO etc.
















![BIBLIOGRAPHY - Shodhgangashodhganga.inflibnet.ac.in/.../10603/11748/15/15_bibliography.pdf · ... _____Bibliography [12] Milos Hauskrecht, Richard Pelikan ... Daniel T. Larose](https://img.pdfslide.us/doc/110x75/5b16bd307f8b9a596d8d7bde/bibliography-bibliography-12-milos-hauskrecht-richard-pelikan.jpg)












