Embed Size (px)
Citation preview

Classical Solutions for a nonlinear Fokker-Planck
equation arising in Computational Neuroscience
Jose A. Carrillo1, Marıa d. M. Gonzalez2, Maria P. Gualdani3 and Maria E. Schonbek4
1 Institucio Catalana de Recerca i Estudis Avancats and Departament de MatematiquesUniversitat Autonoma de Barcelona, E-08193 Bellaterra, Spain
2 ETSEIB - Departament de Matematica Aplicada IUniversitat Politecnica de Catalunya, E-08028 Barcelona, Spain
3 Department of MathematicsUT Austin, Austin, TX 78712, USA
4 Department of MathematicsUC Santa Cruz, Santa Cruz, CA 95064, USA
Abstract
In this paper we analyze the global existence of classical solutions to the initial boundary-value problem for a nonlinear parabolic equation describing the collective behavior of an ensem-ble of neurons. These equations were obtained as a diffusive approximation of the mean-fieldlimit of a stochastic differential equation system. The resulting Fokker-Planck equation presentsa nonlinearity in the coefficients depending on the probability flux through the boundary. Weshow by an appropriate change of variables that this parabolic equation with nonlinear bound-ary conditions can be transformed into a non standard Stefan-like free boundary problem witha source term given by a delta function. We prove that there are global classical solutions forinhibitory neural networks, while for excitatory networks we give local well-posedness of classicalsolutions together with a blow up criterium. Finally, we will also study the spectrum for thelinear problem corresponding to uncoupled networks and its relation to Poincare inequalities forstudying their asymptotic behavior.
1 Introduction
The basic models for the collective behavior of large ensemble of interacting neurons are basedon systems of stochastic differential equations. Each subsystem describes an individual neuronin the network as an electric circuit model with a choice of parameters such as the membranepotential v, the conductances, the proportion of open ion channels and their type. The individualdescription of each neuron includes an stochastic current due to the spike events produced byother neurons at the network received through the presynaptic connections. We refer to theclassical references [14, 10, 23] and the nice brief introduction [13] for a wider overview of thisarea and further references. As a result of the coupling network, the collective behavior of thestochastic differential system can lead to complicated dynamics: several stationary states withdifferent stability properties and bifurcations, synchronization, and so on, see [1, 17, 18] forinstance.
To understand this behavior the evolution in time of the potential through the cell membranev(t) has been modeled by several authors [1, 2, 20, 6, 22, 19]. The neurons relax towards theirresting potential vL (leak potential) in the absence of any interaction. All the interactions ofthe neuron within the network are modeled by an incoming presynaptic current I(t) given byan stochastic process to be specified below. Therefore, the evolution of the membrane potential
1

is assumed to follow the equation
Cmdv
dt= −gL(v − vL) + I(t) , (1.1)
where Cm is the capacitance of the membrane and, gL the leak conductance. If the voltageachieves the so-called threshold voltage (maximum voltage), the neuron voltage is instanta-neously reset to a fixed voltage vR. At each reset time the process produces a spike, whichbuilds up the incoming presynaptic current I(t) and is added to the mean firing rate producedby the network N(t) defined as the average number of spikes per unit time produced in thenetwork.
Most of the microscopic models for neuron dynamics assume that the spike appearancetimes in the network follow an independent discrete Poisson process with constant probabilityof emitting a spike per unit time ν. We will assume that there are two types of neurons:inhibitory and excitatory, and each produce a spike of strength JE and JI respectively attheir spike times. The total presynaptic current I(t) in (1.1), coming from the spikes withinthe network, is computed as the difference of the total spike strengths received through thesynapsis by a neuron at the network composed by CE excitatory and CI inhibitory neurons.This stochastic process I(t) has mean given by µC = Bν with B = CEJE − CIJI and, andvariance σ2
C = (CEJ2E +CIJ
2I )ν. We will say that the network is excitatory if B > 0 (inhibitory
respectively if B < 0 ). Dealing with these discrete Poisson processes can be difficult and thus,an approximation was proposed in the literature. This approximation consists in substitutingthe stochastic process I(t) by a standard drift-diffusion process with the same mean and variance
I(t) dt ≈ µC dt+ σC dWt
where Wt is the standard Brownian motion. We refer for more details of this approximation to[1, 2, 20, 6, 22, 19, 15]. The approximation to the original Leaky Integrate&Fire neuron model(1.1) is then given by
dv = (−v + vL + µC) dt+ σC dWt (1.2)
where we choose the units such that Cm = gL = 1, for v ≤ vth with the jump process: v(t+o ) = vRwhenever at to the voltage achieves the threshold value v(t−o ) = vth; with vL < vR < vth. Thelast ingredient of the model is given by the probability of firing per unit time of the Poissonianspike train ν, i.e., the so-called total firing rate. The firing rate depends on the activity of thenetwork and some external stimuli, it is given by ν = νext +N(t) where N(t) is the mean firingrate produced by the network and νext ≥ 0 is the external firing rate. The value of N(t) is thencomputed as the flux of neurons across the threshold or firing voltage vth.
Studying the stochastic problem (1.2) with the jump process specified above can be writtenin terms of a partial differential equation for the evolution of the probability density p(v, t) ≥ 0of finding neurons at a voltage v ∈ (−∞, vth] at a time t ≥ 0. This PDE has the structure of abackward Kolmogorov or Fokker-Planck equation with sources and given by
∂p
∂t(v, t) =
∂
∂v
[(v − vL − µC
)p(v, t)
]+σ2C
2
∂2p
∂v2(v, t) +N(t) δv=vR , v ≤ vth . (1.3)
A Delta Dirac source term in the right-hand side appears due to the firing at time t ≥ 0 forneurons whose voltage is immediately reset to vR. Imposing the condition that no neuron shouldhave the firing voltage due to their instantaneous discharge, we complement (1.3) with Dirichletand initial boundary conditions
p(vth, t) = 0, p(−∞, t) = 0, p(v, 0) = pI(v) ≥ 0 . (1.4)
The mean firing rate N(t) is implicitly given by
N(t) := −σ2C
2
∂p
∂v(vth, t) ≥ 0 , (1.5)
2

that is the flux of probability of neuron’s voltage, is the least at vth. It is easy to check thatthis definition implies, at least formally, that the evolution of (1.3) is a probability density forall times, that is ∫ vth
−∞p(v, t) dv =
∫ vth
−∞pI(v) dv = 1
for all t ≥ 0. Let us note that in most of the computational neuroscience literature [1, 15],equation (1.3) is specified on the intervals (−∞, vR) or (vR, vth) with no source term but rathera boundary condition relating the values of the fluxes from the right and the left at v = vR. Theformulation presented here is equivalent and more suitable for mathematical treatment. Othermore complicated microscopic models including the conductance and leading to kinetic-likeFokker-Planck equations have been studied recently, see [4] and the references therein.
Finally, the nonlinear Fokker-Planck equation can be rewritten as
∂p
∂t=σ2
2
∂2p
∂v2+
∂
∂v[(v − µ)P ] +N(t) δv=vR , v ≤ vth
where σ2 = 2a20 + a1N(t), with a0 > 0, a1 ≥ 0 and µ = Bνext + BN(t). We will focus only onthe simplest case in which the nonlinearity in the diffusion coefficient is neglected by assuminga1 = 0. Without loss of generality, we can choose a new voltage variable v ≤ 0 and an scaleddensity p defined by
p(t, v) = βp(t, βv + vth)
where β = a0. Then our main equation, after dropping the tildes, reads
∂p
∂t=∂2p
∂v2+
∂
∂v[(v − µ)p] +N(t) δv=vR , v ≤ 0 , (1.6)
where the drift term, source of the nonlinearity, is given by
µ = b0 + bN(t) with N(t) = −∂p∂v
(0, t) ≥ 0 (1.7)
with b0 = (Bνext − vth)/a0 and b = B/a30. Let us remark that the sign of b0 determines ifthe neurons due only to external stimuli may produce a spike or not, therefore it controls thestrength of the external stimuli.
In a recent work [3], it was shown that the problem (1.6)-(1.4)-(1.7) can lead to finite-timeblow up of solutions for excitatory networks b > 0 and for initial data concentrated close enoughto the threshold voltage. Here, we give a characterization of the maximal time of existence ofthe classical solution, if finite, and thus, of the blow up time. We show that if the maximaexistence time is finite, it coincides with the time in which the firing rate N(t) diverges. Thisdivergence in finite time of the firing rate has no clear biological significance. It could mean thatsome sort of synchronization of the whole network happens, see [3] for a deeper discussion. Thisis an scenario that does not show up in the typical reported applications [1, 2]. In the rest ofthis work, we concentrate in studying the existence of classical solutions to the initial boundaryvalue problem (1.6)-(1.4)-(1.7). We show that solutions exists globally in time for inhibitorynetworks b < 0 and, we give a characterization of the blow up time for the case when b > 0.Although the precise notion of classical solution will be discussed in the next section, the maintheorem of this work can be summarized as follows.
Theorem 1.1. Let pI(x) be a non-negative C1((−∞, vth]) function such that pI(vth) = 0.Suppose that pI , (pI)x decay at −∞, then there exists a unique classical solution to the problem(1.6)-(1.4)-(1.7) on the time interval [0, T ∗) with T ∗ =∞ for b ≤ 0 and, for b > 0, T ∗ > 0 canbe characterized by
T ∗ = sup{t > 0 : N(t) <∞} .
Furthermore, for b > 0 there exist classical solutions blowing up in finite time, and thus, withdiverging mean firing rate in finite time.
3

Let us remark that the last statement is merely obtained by combining the result in [3] withour classical solutions existence result and the characterization of the maximal time of existence.
The main strategy of the proof as is shown in section 2, is given by an equivalence. Thisequivalence, through an explicit time-space change of variables, transforms our problem into aStefan-like free boundary problem with Delta Dirac source terms, resembling price-formationmodels studied in [11]. In section 3, we will use ideas and arguments in Stefan problems [7, 8] toshow local existence of a solution. Next, in section 4 we will prove global existence of classicalsolutions for inhibitory networks (b < 0) and give a characterization of the blow up time forexcitatory networks (b > 0). The difference between the cases b < 0 and b > 0 corresponds tothe well studied Stefan-problem in the normal and in the undercooled cases, see [16] for classicalreferences in the Stefan problem. The final section is devoted to study the spectrum of thelinear version of (1.6) (b = 0) that has some interesting features and properties connected toclassical Fokker-Planck equations.
2 Relation to the Stefan problem
The main aim of this section is to rewrite equation (1.6) as a free boundary Stefan problem witha nonstandard right hand side. For this we recall a well known change of variables, [5], thattransforms Fokker-Planck type equations into a non-homogeneous heat equation. This changeof variables is given by
y = etv, τ =1
2(e2t − 1),
that yields
p(v, t) = etw
(etv,
1
2(e2t − 1)
),
or equivalently
w(y, τ) = (2τ + 1)−1/2p
(y√
2τ + 1,
1
2log(2τ + 1)
).
In the sequel, to simplify the notation, we use α(τ) = (2τ + 1)−1/2 = e−t. A straightforwardcomputation gives for w:
wτ = wyy − µ(τ)α(τ)wy +M(τ)δy= vRα(τ)
(2.1)
where M(τ) = α2(τ)N(t) = − ∂w∂y
∣∣∣y=0
. The additional change of variables:
u(x, τ) = w(y, τ) wherex = y −∫ τ
0
µ(s)α(s) ds = y − b0(√
1 + 2t− 1)− b
∫ τ
0
M(s)α−1(s) ds,
removes the term with wy in (2.1). For boundary conditions at initial time, denote sI = vth(= 0).We have the following equivalent equation
Lemma 2.1. System (1.6)-(1.4)-(1.5) is equivalent to the following problem
ut = uxx +M(t)δx=s1(t), x < s(t), t > 0,
s(t) = sI − b0(√
1 + 2t− 1)− b
∫ t
0
M(s)α−1(s) ds, t > 0,
s1(t) = s(t) +vRα(t)
, t > 0,
M(t) = − ∂u
∂x
∣∣∣∣x=s(t)
, t > 0,
u(−∞, t) = 0, u(s(t), t) = 0, t > 0,
u(x, 0) = uI(x), x < sI .
(2.2)
4

Proof. The proof is straightforward by the changes of variables specified above and, as such isomitted.
We now give a definition the concept of classical solution. In what follows we work withthe Stefan-like free boundary problem (2.2). It is immediate to translate this to a concept ofclassical solution to the original problem (1.6)-(1.4)-(1.5) by substituting u by p, x by v, M(t)by N(t), s1(t) by vR, and s(t) by vth.
Definition 2.2. Let uI(x) be a non-negative C1((−∞, sI ]) function such that uI(sI) = 0. Sup-pose that uI , (uI)x decay at −∞. We say that (u(x, t), s(t)) is a solution of (2.2) with initialdata uI(x) on the time interval J = [0, T ) or J = [0, T ], for a given 0 < T ≤ ∞, if:
1. M(t) is a continuous function for all t ∈ J ,
2. u is continuous in the region {(x, t) : −∞ < x ≤ s(t), t ∈ J},3. uxx and ut are continuous in the region {(x, t) : −∞ < x < s1(t), t ∈ J\{0}} ∪ {(x, t) :
s1(t) < x < s(t), t ∈ J\{0}},4. ux(s1(t)−, t), ux(s1(t)+, t), ux(s(t)−, t) are well defined,
5. ux decays at −∞,
6. Equations (2.2) are satisfied.
The next lemma presents some of the a priori properties of the solution to (2.2).
Lemma 2.3. Let u(x, t) be a solution to (2.2) in the sense of Definition 2.2.Then
i) The mass is conserved, ∫ s(t)
−∞u(x, t) dx =
∫ sI
−∞uI(x)dx,
for all t > 0.
ii) The flux across the free boundary s1 is exactly the strength of the source term:
M(t) := −ux(s(t), t) = ux(s1(t)−, t)− ux(s1(t)+, t).
iii) If b0 < 0 and b < 0 (resp. b0 > 0 and b > 0), the free boundary s(t) is a monotoneincreasing (resp. decreasing) function of time.
Proof. i) Mass conservation, follows by integration of the equation and straightforward integra-tion by parts.ii) To establish the jump across the free boundary, i.e. part ii), integrate the first equation in(2.2) over the interval (−∞, s1(t)) , yielding∫ s1(t)
−∞utdx−
∫ s1(t)
−∞uxxdx = 0.
Hence,
∂
∂t
∫ s1(t)
−∞u(x, t)dx = ux(s1(t)−, t) + s1(t)u(s1(t), t). (2.3)
Similarly, an integration of the first equation in (2.2) in the interval (s1(t), s(t)) gives
∂
∂t
∫ s(t)
s1(t)
u(x, t)dx+ s1(t)u(s1(t), t)− s(t)u(s(t), t) = ux(s(t), t)− ux(s1(t)+, t).
If we substitute u(s(t), t) = 0 in the previous line it follows
∂
∂t
∫ s(t)
s1(t)
udx+ s1(t)u(s1(t), t) = ux(s(t), t)− ux(s1(t)+, t). (2.4)
5

Adding (2.3) to (2.4) and recalling that the mass is preserved we get
0 =∂
∂t
∫ s(t)
−∞u(x, t)dx = ux(s1(t)−, t) + ux(s(t), t)− ux(s1(t)+, t).
It follows thatux(s(t), t) = ux(s1(t)+, t)− ux(s1(t)−, t),
as desired.Let us prove the last part iii). The free boundary is a monotone increasing function of time
since b0 < 0, b < 0, α > 0, and
s(t) = sI − b0(√
1 + 2t− 1)− b
∫ t
0
M(s)α−1(s) ds, t > 0,
while the fact that M(t) is strictly positive follows by the classical Hopf’s lemma.
3 Local existence and uniqueness
In this section we prove local existence of solution. Our method is inspired by the theorydeveloped by Friedman in [7, 8] for the Stefan problem. We first derive an integral formulationfor the problem. A derivative with respect to x yields an integral equation for the flux M ,where a fixed point argument can be used to obtain short time existence. Once M is known theequation for u decouples and it is solved as a linear equation.
Theorem 3.1. Let uI(x) be a non-negative C1((−∞, sI ]) function such that uI(sI) = 0, anduI , (uI)x decay at −∞. Then there exists a time T > 0, and a unique solution (u(x, t), s(t)) ofthe equation (2.2) in the sense of Definition 2.2 for t ∈ [0, T ] with initial data uI . Moreover,the existence time T is an inversely proportional function of
sup−∞<x≤sI
|u′I(x)| .
The proof of Theorem 3.1 will be divided in several steps. The first step deals with anintegral formulation of the solution, which is used to show the existence of M .
3.1 The integral formulation
Let G be the the Green’s function for the heat equation on the real line:
G(x, t, ξ, τ) =1
[4π(t− τ)]1/2exp
{− |x− ξ|
2
4(t− τ)
}.
To obtain an integral formulation of the solution u of (2.2), recall the following Green’s identity
∂
∂ξ
(G∂u
∂ξ− u∂G
∂ξ
)− ∂
∂τ(Gu) = 0. (3.1)
To recover u we first integrate the identity (3.1) in the two regions
−∞ < ξ < s1(τ), 0 < τ < t, and s1(τ) < ξ < s(τ), 0 < τ < t,
and then add up the results from the integration. We split the resulting expression into thefollowing four terms; the only problematic one is the one containing uξξ:
I =
∫ t
0
∫ s1(τ)
−∞
∂
∂ξ
(G∂u
∂ξ
)dξdτ, II =
∫ t
0
∫ s(τ)
s1(τ)
∂
∂ξ
(G∂u
∂ξ
)dξdτ,
III =
∫ t
0
∫ s(τ)
−∞
∂
∂ξ
(u∂G
∂ξ
)dξdτ, IV =
∫ t
0
∫ s(τ)
−∞
∂
∂τ(Gu) dξdτ.
6

Each term will be analyzed separately. Note that u and G have enough decay as |ξ| → ∞ tojustify the following computations due to Definition 2.2. Since G(x, t,−∞, τ) = 0 it holds
I =
∫ t
0
G∂u
∂ξ
∣∣∣∣ξ=s1(τ)ξ=−∞
dτ =
∫ t
0
G(x, t, s1(τ), τ)∂u
∂ξ
∣∣∣∣s1(τ)−
dτ. (3.2)
Next, we obtain
II =
∫ t
0
{G∂u
∂ξ
∣∣∣∣ξ=s(τ)
−G ∂u
∂ξ
∣∣∣∣ξ=s1(τ)+
}dτ = −
∫ t
0
{G|ξ=s(τ)M(τ) +G
∂u
∂ξ
∣∣∣∣ξ=s1(τ)+
}dτ. (3.3)
Here we have used that ∂u∂ξ
∣∣∣ξ=s(τ)
= −M(τ). For the third integral we have
III = −∫ t
0
{(u∂G
∂ξ
)∣∣∣∣ξ=s(τ)
−(u∂G
∂ξ
)∣∣∣∣ξ=−∞
}dτ
= −∫ t
0
{(u(s(τ), τ)
∂G
∂ξ
∣∣∣∣ξ=s(τ)
− u(−∞, τ)∂G
∂ξ
∣∣∣∣ξ=−∞
}dτ = 0,
(3.4)
taking into account that u(s(τ), τ) = u(−∞, τ) = 0. Finally, using that u(s(τ), τ) = 0, we have
IV =
∫ t
0
∂
∂τ
∫ s(τ)
−∞Gudξdτ =
∫ s(t)
−∞Gu|τ=t dξ −
∫ s(0)
−∞Gu|τ=0 dξ.
Recall that G(x, t, ξ, t) = δx=ξ, thus the last identity yields
IV =
∫ s(t)
−∞δξ=xu(ξ, t)dξ −
∫ s(0)
−∞G(x, t, ξ, 0)uI(ξ)dξ. (3.5)
Combining (3.2), (3.3), (3.4), (3.5), and part ii) of Lemma 2.3, yields that the solution u readsas
u(x, t) =
∫ s(0)
−∞G(x, t, ξ, 0)uI(ξ)dξ +
∫ t
0
G(x, t, s1(τ))∂u
∂ξ
∣∣∣∣ξ=s1(τ)−
−∫ t
0
M(τ)G(x, t, s(τ), τ)dτ −∫ t
0
G(x, t, s1(τ))∂u
∂ξ
∣∣∣∣ξ=s1(τ)+
=
∫ s(0)
−∞G(x, t, ξ, 0)uI(ξ)dξ −
∫ t
0
M(τ)G(x, t, s(τ), τ)dτ +
∫ t
0
M(τ)G(x, t, s1(τ), τ)dτ
= : I1 − I2 + I3. (3.6)
The term I1 represents the solution to the heat equation with data uI . Indeed,∫ s(0)
−∞G(x, t, ξ, 0)uI(ξ)dξ
is the solution to the homogeneous heat equation with initial data
u0(ξ) =
{uI(ξ) ξ ≤ s(0),0 ξ > s(0).
All the calculations up to here are formal assuming that u is a solution of the equation (2.2)as in Definition 2.2. We now derive an equation for M which will be solved for short time using a
7
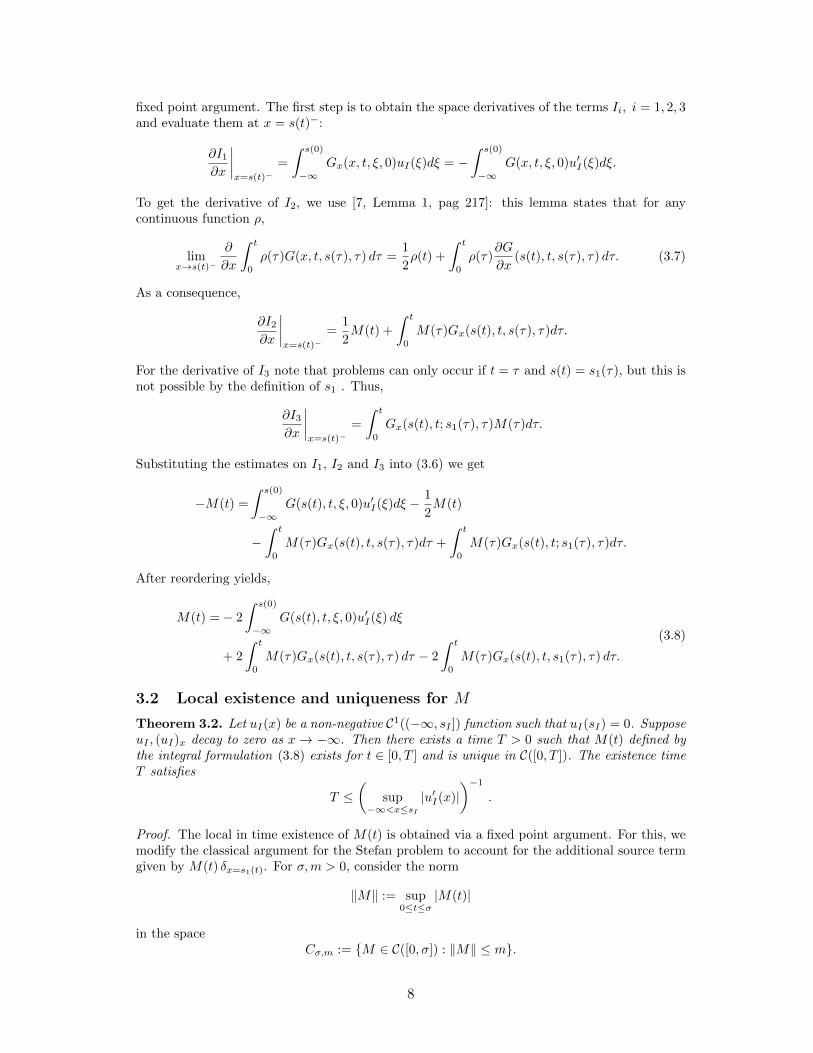
fixed point argument. The first step is to obtain the space derivatives of the terms Ii, i = 1, 2, 3and evaluate them at x = s(t)−:
∂I1∂x
∣∣∣∣x=s(t)−
=
∫ s(0)
−∞Gx(x, t, ξ, 0)uI(ξ)dξ = −
∫ s(0)
−∞G(x, t, ξ, 0)u′I(ξ)dξ.
To get the derivative of I2, we use [7, Lemma 1, pag 217]: this lemma states that for anycontinuous function ρ,
limx→s(t)−
∂
∂x
∫ t
0
ρ(τ)G(x, t, s(τ), τ) dτ =1
2ρ(t) +
∫ t
0
ρ(τ)∂G
∂x(s(t), t, s(τ), τ) dτ. (3.7)
As a consequence,
∂I2∂x
∣∣∣∣x=s(t)−
=1
2M(t) +
∫ t
0
M(τ)Gx(s(t), t, s(τ), τ)dτ.
For the derivative of I3 note that problems can only occur if t = τ and s(t) = s1(τ), but this isnot possible by the definition of s1 . Thus,
∂I3∂x
∣∣∣∣x=s(t)−
=
∫ t
0
Gx(s(t), t; s1(τ), τ)M(τ)dτ.
Substituting the estimates on I1, I2 and I3 into (3.6) we get
−M(t) =
∫ s(0)
−∞G(s(t), t, ξ, 0)u′I(ξ)dξ −
1
2M(t)
−∫ t
0
M(τ)Gx(s(t), t, s(τ), τ)dτ +
∫ t
0
M(τ)Gx(s(t), t; s1(τ), τ)dτ.
After reordering yields,
M(t) =− 2
∫ s(0)
−∞G(s(t), t, ξ, 0)u′I(ξ) dξ
+ 2
∫ t
0
M(τ)Gx(s(t), t, s(τ), τ) dτ − 2
∫ t
0
M(τ)Gx(s(t), t, s1(τ), τ) dτ.
(3.8)
3.2 Local existence and uniqueness for M
Theorem 3.2. Let uI(x) be a non-negative C1((−∞, sI ]) function such that uI(sI) = 0. SupposeuI , (uI)x decay to zero as x→ −∞. Then there exists a time T > 0 such that M(t) defined bythe integral formulation (3.8) exists for t ∈ [0, T ] and is unique in C([0, T ]). The existence timeT satisfies
T ≤(
sup−∞<x≤sI
|u′I(x)|)−1
.
Proof. The local in time existence of M(t) is obtained via a fixed point argument. For this, wemodify the classical argument for the Stefan problem to account for the additional source termgiven by M(t) δx=s1(t). For σ,m > 0, consider the norm
‖M‖ := sup0≤t≤σ
|M(t)|
in the spaceCσ,m := {M ∈ C([0, σ]) : ‖M‖ ≤ m}.
8

Set
T (M)(t) :=− 2
∫ s(0)
−∞G(s(t), t, ξ, 0)u′I(ξ)dξ
+ 2
∫ t
0
M(τ)Gx(s(t), t, s(τ), τ)dτ − 2
∫ t
0
M(τ)Gx(s(t), t, s1(τ), τ)dτ
:= J1 + J2 + J3.
(3.9)
In order to apply fixed point arguments, it is necessary to show that for sufficiently small σ wehave: T : Cσ,m → Cσ,m and that T is a contraction. Define
m := 1 + 2 sup−∞<x≤s(0)
|u′I(x)|. (3.10)
Step 1.- We show that for σ sufficiently small T : Cσ,m → Cσ,m. For simplicity, we focus onthe proof in the case b < 0. At the end we make the necessary corrections for b > 0. Choose σsufficiently small so that
i. α−1(t) ≤ 2, ∀ t ≤ σ ,
ii. m(|b0|+2m|b|)√π
σ1/2 ≤ 1/2,
iii. |vR| − |b0|σ > 0,
iv.2m√π
∫ ∞|vR|−|b0|σ√
8σ
z−1 exp{−z2}dz ≤ 1/2.
We obtain first an auxiliary estimate. Since σ has been chosen so small that condition i. holdsand α−1
√1 + 2t is a 1-Lipschitz function for t ≥ 0, if M ∈ Cσ,m then
|s(t)− s(τ)| ≤ |b0||t− τ |+ |b|∫ t
τ
M(s)α−1(s) ds ≤ (|b0|+ 2|b|m) |t− τ |, (3.11)
i.e., s(t) is a Lipschitz continuous function of time.To estimate the image of the operator T (M) as defined in (3.9) for M ∈ Cσ,m we find
separately a bound for each term J1, J2, J3. First, for J1, note that∫ s(0)
−∞G(s(t), t, ξ, 0) dξ ≤ 1.
Then, it is straightforward to check
|J1| ≤ 2
{sup
−∞<x≤s(0)|u′I(x)|
}∫ s(0)
−∞G(x, t, ξ, 0)dξ ≤ 2 sup
−∞<x≤s(0)|uI(x)|.
We bound J2 as
|J2| ≤ 2m
∫ t
0
|Gx(s(t), t, s(τ), τ)|dτ.
Substituting
Gx(x, t, ξ, τ) = − 1
2√
4π
(x− ξ)(t− τ)3/2
exp
{− |x− ξ|
2
4(t− τ)
}in (3.11) and taking into account the choice of σ given by ii., it follows that:
|J2| ≤m√4π
∫ t
0
|s(t)− s(τ)|(t− τ)3/2
exp
{−|s(t)− s(τ)|2
4(t− τ)
}dτ
≤ m(|b0|+ 2m|b|)√4π
∫ t
0
1
(t− τ)1/2dτ =
2m(|b0|+ 2m|b|)√4π
t1/2 ≤ 2m(|b0|+ 2m|b|)√4π
σ1/2 ≤ 1
2.
9

Before we consider J3, we need the following auxiliary estimates. The inequality ye−y2 ≤ e−
y2
2
implies that
|Gx(x, t, ξ, τ)| ≤ 1√4π(t− τ)
exp
{− |x− ξ|
2
8(t− τ)
}. (3.12)
The definitions of s(t) and s1(τ) = s(τ) + vRα−1(τ), using that b < 0, and by the condition iii,
yield|s(t)− s1(τ)| ≥ |vR| − |b0|σ > 0. (3.13)
If we integrate (3.12) we get∫ t
0
|Gx(s(t), t, s1(τ), τ)| dτ ≤ 1√4π
∫ t
0
1
t− τexp
{−|s(t)− s1(τ)|2
8(t− τ)
}dτ
≤ 1√4π
∫ t
0
1
t− τexp
{− (|vR| − |b0|σ)2
8(t− τ)
}dτ
=1√π
∫ ∞|vR|−|b0|σ√
8t
1
ze−z
2
dz ≤ 1√π
∫ ∞|vR|−|b0|σ√
8σ
1
ze−z
2
dz,
(3.14)
where we used the change of variables z = |vR|−|b0|σ√8(t−τ)
. By the last estimate and by condition iv
|J3| ≤ 2m
∫ t
0
|Gx(s(t), t, s1(τ), τ)| dτ ≤ 2m√π
∫ ∞|vR|−|b0|σ√
8σ
1
ze−z
2
dz ≤ 1
2. (3.15)
The estimates for Ji, i = 1, 2, 3 establish that T (M) ∈ Cσ,m since
‖T (M)‖ ≤ J1 + J2 + J3 ≤ m, ∀M ∈ Cσ,m,
by the choice of m in (3.10).
It remains to consider the case b > 0. It is clear that the only modification needed is theestimte (3.13). For this use
|s(t)−s1(τ)| = |s(t)−s(τ)−vRα−1(τ)| ≥∣∣|vR|α−1(τ)− |s(t)− s(τ)|
∣∣ ≥ |vR|−(|b0|+m)σ, (3.16)
which may be estimated from below by a positive constant for some σ small enough. Then, wehave the same result as in the case b < 0 assuming analogous conditions to i., ii., iii., iv. above.The main difference between the cases bleq0 and b > 0 is that in the case b > 0 in (3.13) thedifference between the free boundary s(t) and the source s1(τ) for 0 ≤ τ ≤ t now depends onthe bound of the initial data (3.10).
Step 2.- The mapping T : Cσ,m → Cσ,m defined in (3.9) is a contraction for σ small enough.
In the sequel the constant C is arbitrary and may change from line to line. Let M,M ∈ Cσ,m,and
s(t) = sI − b0(√
1 + 2t− 1)− b
∫ t
0
M(τ)α−1(τ) dτ, . (3.17)
s(t) = sI − b0(√
1 + 2t− 1)− b
∫ t
0
M(τ)α−1(τ) dτ .
The following auxiliary estimate holds:
|s(t)− s(t)| ≤ |b|∫ t
0
|M(τ)− M(τ)|α−1(τ) dτ ≤ |b| ‖M − M‖∫ t
0
√2τ + 1dτ
=|b|3‖M − M‖
[(2t+ 1)3/2 − 1
].
(3.18)
10

It is straightforward from (3.17) that
|s(t)− ˙s(t)| ≤ 2 |b| ‖M − M‖, 0 < t ≤ σ < 1. (3.19)
By condition i. on σ and (3.11) it follows that
max{|s(t)− s(τ)|, |s(t)− s(τ)|} ≤ (|b0|+ 2m |b|)|t− τ | ≤ (|b0|+ 2 |b|)m|t− τ | . (3.20)
To show that T is a contraction we proceed as follows.
|T (M)− T (M)| ≤ 2
[∫ s(0)
−∞|u′I(ξ)||G(s(t), t, ξ, 0)−G(s(t), t, ξ, 0)| dξ
]
+ 2
∣∣∣∣∫ t
0
M(τ)Gx(s(t), t, s(τ), τ)− M(τ)Gx(s(t), t, s(τ), τ) dτ
∣∣∣∣+ 2
∣∣∣∣∫ t
0
M(τ)Gx(s(t), t, s1(τ), τ)− M(τ)Gx(s(t), t, s1(τ), τ) dτ
∣∣∣∣= : A1 +A2 +A3.
Without loss of generality assume that s(t) > s(t). The mean value theorem applied to thekernel G(x, t, ξ, 0) gives for some s ∈ [s(t), s(t)]
|G(s(t), t, ξ, 0)−G(s(t), t, ξ, 0)| ≤ |Gx(s, t, ξ, 0)| · |s(t)− s(t)|. (3.21)
Recall that
|Gx(s, t, ξ, 0)| = |s− ξ|2t
1√4πt
exp
{−|s− ξ|
2
4t
}≤ 1√
t
1√4πt
exp
{−|s− ξ|
2
8t
},
where we have used the relation ye−y2 ≤ e−y2/2. Hence (3.21) simply reduces to
|G(s(t), t, ξ, 0)−G(s(t), t, ξ, 0)| ≤ C√tG(s(t), 2t, ξ, 0))|s(t)− s(t)|.
Integrating in ξ, together with (3.18) yields
A1 ≤ C|b|‖u′I‖‖M − M‖{
(1 + 2t)3/2 − 1
t1/2
}.
Since limt→0
t−1/2((1 + 2t)3/2 − 1) = 0, for σ sufficiently small we have A1 ≤ 16‖M − M‖. To
estimate A2 we proceed as follows
|A2| ≤ 2
∣∣∣∣∫ t
0
M(τ)Gx(s(t), t, s(τ), τ)− M(τ)Gx(s(t), t, s(τ), τ)dτ
∣∣∣∣+ 2
∣∣∣∣∫ t
0
M(τ)Gx(s(t), t, s(τ), τ)− M(τ)Gx(s(t), t, s(τ), τ)dτ
∣∣∣∣= : A21 +A22.
The Lipschitz bound (3.11) for s yields
|Gx(s(t), t, s(τ), τ)| ≤ 1
2√
4π
|s(t)− s(τ)|(t− τ)3/2
≤ (|b0|+ 2m |b|)2√
4π
1
(t− τ)1/2,
and consequently
|A21| ≤ 2‖M − M‖∫ t
0
|Gx(s(t), t, s(τ), τ)|dτ
≤C‖M − M‖∫ t
0
1
(t− τ)1/2dτ ≤ Cm‖M − M‖σ1/2 ≤ 1
12‖M − M‖,
11

for σ small enough. To estimate A22 proceed as follows:
|Gx(s(t),t, s(τ), τ)−Gx(s(t), t, s(τ), τ)|
= C
∣∣∣∣s(t)− s(τ)
t− τG(s(t), t, s(τ), τ)− s(t)− s(τ)
t− τG(s(t), t, s(τ), τ)
∣∣∣∣≤ C
∣∣∣∣s(t)− s(τ)
t− τ− s(t)− s(τ)
t− τ
∣∣∣∣G(s(t), t, s(τ), τ)
+ Cs(t)− s(τ)
t− τ|G(s(t), t, s(τ), τ)−G(s(t), t, s(τ), τ)|
=: B1 + B2.
In order to estimate B1 we use the mean value theorem
[s(t)− s(t)]− [s(τ)− s(τ)]
t− τ= s(τ)− ˙s(τ) (3.22)
for some 0 < τ < t. By the previous equality and (3.19) we have
B1 ≤C
(t− τ)1/2|s(τ)− ˙s(τ)| ≤ C
(t− τ)1/2‖M − M‖.
On the other hand, to handle the term B2, we first note that
|G(s(t), t, s(τ), τ)−G(s(t), t, s(τ), τ)|
≤ G(s(t), t, s(τ), τ)
∣∣∣∣1− exp
{−(s(t)− s(τ))2 + (s(t)− s(τ))2
4(t− τ)
}∣∣∣∣ . (3.23)
Define now
S := (s(t)−s(τ))2−(s(t)−s(τ))2 = [s(t)− s(τ) + s(t)− s(τ)] [s(t)−s(t)−(s(τ)−s(τ))]. (3.24)
The mean value theorem (3.22) and the estimate (3.19) lead to
|[s(t)− s(t)]− [s(τ)− s(τ)]| =∣∣s(τ)− ˙s(τ)
∣∣ (t− τ) ≤ C‖M − M‖(t− τ). (3.25)
On the other hand, we recall again the Lipschitz estimate (3.20), i.e.,
max{|s(t)− s(τ)|, |s(t)− s(τ)|} ≤ Cm(t− τ), (3.26)
for a constant depending on |b|, |b0|, which yields an estimate for (3.24),
|S|t− τ
≤ Cmσ‖M − M‖.
The combination of the above inequality with (3.23) together with the mean value theoremshows that
|G(s(t), t, s(τ), τ)−G(s(t), t, s(τ), τ)| ≤ G(s(t), t, s(τ), τ)Cmσ‖M − M‖,
and thus the term B2 is estimated using (3.26)
B2 ≤ Cm2‖M − M‖σ 1
(t− τ)1/2.
Multiplying B1 + B2 by M(τ) and integrating over the interval [0, t] yields
A22 ≤ Cm∫ t
0
|Gx(s(t), t, s(τ), τ)−Gx(s(t), t, s(τ), τ)| dτ
≤ Cm∫ t
0
(B1 + B2) dτ ≤ Cm3‖M − M‖σ1/2 <1
12‖M − M‖,
12

for σ small enough.The next step is to estimate A3. Split the integral into two terms
|A3| ≤ 2
∣∣∣∣∫ t
0
M(τ)Gx(s(t), t, s1(τ), τ)− M(τ)Gx(s(t), t, s1(τ), τ)dτ
∣∣∣∣+ 2
∣∣∣∣∫ t
0
M(τ)Gx(s(t), t, s1(τ), τ)− M(τ)Gx(s(t), t, s1(τ), τ)dτ
∣∣∣∣= : A31 +A32.
The estimate for A31 is very similar to that of J3 from (3.15). Indeed, we can analogouslydeduce
|A31| ≤ 2‖M − M‖∫ t
0
|Gx(s(t), t, s1(τ), τ)|dτ
≤ C‖M − M‖∫ ∞
Λ√8σ
1
ze−z
2
dz <1
12‖M − M‖,
where we used that s(t)− s1(τ) ≥ Λ > 0 for σ sufficiently small with
Λ :=
{|vR| − |b0|σ for b < 0
|vR| − (|b0|+m)σ for b > 0.
To bound A32 we split
|Gx(s(t),t, s1(τ), τ)−Gx(s(t), t, s1(τ), τ)|
= C
∣∣∣∣s(t)− s1(τ)
t− τG(s(t), t, s1(τ), τ)− s(t)− s1(τ)
t− τG(s(t), t, s1(τ), τ)
∣∣∣∣≤ C
∣∣∣∣s(t)− s1(τ)
t− τ− s(t)− s1(τ)
t− τ
∣∣∣∣G(s(t), t, s1(τ), τ)
+ Cs(t)− s1(τ)
t− τ|G(s(t), t, s1(τ), τ)−G(s(t), t, s1(τ), τ)|
=: B′1 + B′2.
We observe that B′1 is estimated exactly the same way as B1. This is a consequence of
[s(t)− s(t)]− [s1(τ)− s1(τ)] = [s(t)− s(t)]− [s(τ)− s(τ)].
We can continue from (3.22) as before to obtain
|B′1| ≤C
(t− τ)1/2‖M − M‖. (3.27)
The estimate for B′2 is slightly more involved. We write
B′2 = Cs(t)− s1(τ)
t− τ|G(s(t), t, s1(τ), τ)|
(1− exp
{S′
4(t− τ)
})(3.28)
forS′ : = −(s(t)− s1(τ))2 + (s(t)− s1(τ))2
= [s(t)− s1(τ) + s(t)− s1(τ)] [s(t)− s1(τ)− s(t) + s1(τ)].
By the definitions of s1 and s1 (see (2.2)) we have that
|s(t)− s1(τ)− s(t) + s1(τ)| = |s(t)− s(τ)− s(t) + s(τ)| ≤ C‖M − M‖(t− τ), (3.29)
where in the last inequality we have used estimate (3.25). On the other hand,
|[s(t)− s1(τ) + s(t)− s1(τ)]| ≤ |s(t)− s(τ)|+ |s(t)− s(τ)|+ 2|vR|√
2τ + 1 ≤ Cmσ, (3.30)
13

if we use again the Lipschitz estimate (3.26). Hence putting together (3.29) and (3.30) we getagain that
|S′|t− τ
≤ Cmσ‖M − M‖,
and consequently, (3.28) reduces to
|B′2| ≤ Cms(t)− s1(τ)
t− τG(s(t), t, s1(τ), τ)σ‖M − M‖.
Integrating the previous expression, using the inequality ye−y2 ≤ e−y2/2, and noting that s(t)−
s1(τ) ≥ Λ > 0, we can give a very rough estimate that is enough to our purposes:∫ t
0
|B′2| dτ ≤ Cmσ‖M − M‖. (3.31)
Thus, from the estimates for B′1 and B′2 from (3.27) and (3.31) respectively,
|A32| ≤ Cm∫ t
0
(B′1 + B′2) dτ ≤ C‖M − M‖(mσ1/2 +m2σ
)<
1
12‖M − M‖,
for some suitable σ small enough. Then, adding the estimates obtained for A1,A2 and A3 yieldsthat T is a contraction satisfying for some σ small enough inversely proportional to m:
‖TM − TM‖ ≤ 1
2‖M − M‖.
This concludes the proof of Theorem 3.2 as desired.
3.3 Recovery of u
Theorem 3.2 shows that we have short time existence of a mild solution for problem (2.2) (i.e.,a solution in the integral sense). However, one can easily show that:
Corollary 3.3. There exists a unique solution of problem (2.2) in the sense of Definition 2.2for t ∈ [0, T ].
Proof. Once M is known, one can construct u from Duhamel’s formula (3.6). The smoothnessand decay of u follow immediately from here. One needs to check also that u has well definedside derivatives at s1. But this follows from formula (3.7) applied to s1(t) and the estimate for|Gx(s1(t), t, s1(τ), τ)| that follows similarly as the calculation in (3.14).
This completes the proof of Theorem 3.1.
4 Proofs of the Main Results
From the previous arguments, see (3.10), it is clear that the obstacle for long time existence inthis case is the possible blow up in time of ‖ux(·, t)‖∞ particularly at the free boundary, i.e. theblow up of M(t). We now formalize this idea by showing that we can extend the solution aslong as the firing rate M(t) is bounded.
Proposition 4.1. Suppose that the hypotheses of Theorem 3.1 hold and that (u(t), s(t)) is asolution to (2.2) in the time interval [0, T ]. Assume, in addition, that
U0 := supx∈(−∞,s(t0−ε)]
|ux(x, t0 − ε)| <∞ and that M∗ = supt∈(t0−ε,t0)
M(t) <∞ ,
for some 0 < ε < t0 ≤ T . Then
sup {|ux(x, t)| with x ∈ (−∞, s(t)] , t ∈ [t0 − ε, t0)} <∞ ,
with a bound depending only on the quantities M∗ and U0.
14

Proof. Differentiating (3.6) in x yields
ux(x, t) =
∫ s(t0−ε)
−∞G(x, t, ξ, t0 − ε)ux(ξ, t0 − ε)dξ
−∫ t
t0−εM(τ)Gx(x, t, s(τ), τ)dτ +
∫ t
t0−εM(τ)Gx(x, t, s1(τ), τ)dτ
=:I1 − I2 + I3.
The estimate for I1 is straightforward from heat kernel properties and it depends only on U0.Let us deal with I2. Since M is uniformly bounded in the whole interval t0 − ε < t < t0, we get
|I2| ≤ C∫ t
t0−ε|Gx(x, t, s(τ), τ)|dτ. (4.1)
Next, it is shown in [7, Eq. (1.16), pag. 219] that for any Lipschitz continuous function s,∫ t
t−ε
|x− s(τ)|(t− τ)
G(x, t, s(τ), τ)dτ ≤ C, t ∈ (t0 − ε, t0),
for some C depending on the Lipschitz constant of s, t0 and ε. Then this formula allows tocontrol the expression in (4.1) in order to bound the term I2 for t ∈ (t0 − ε, t0). However, thisbound may depend on t0 and M∗ since the Lipschitz constant of s does, see (3.17).
Finally, the same argument works for I3, replacing s by s1 in the previous calculations.
With this result in hand, our solutions can be extended to a maximal time of existence and,we can characterize this maximal time. The following result holds no matter the sign of b.
Theorem 4.2. Suppose that the hypotheses of Theorem 3.1 hold. Then the solution u can beextended up to a maximal time 0 < T ∗ ≤ ∞ given by
T ∗ = sup{t > 0 : M(t) <∞} .
Proof. Assume that the maximal time of existence of a classical solution (u(t), s(t)) to (2.2) inthe sense of Definition 2.2 is T ∗ < ∞, if not there is nothing to show. By definition we haveT ∗ ≤ sup{t > 0 : M(t) < ∞}. Let us show the equality by contradiction. Let us assume thatT ∗ < sup{t > 0 : M(t) <∞} and then, there exists 0 < ε < T ∗ such that
M∗ = supt∈(T∗−ε,T∗)
M(t) <∞ .
Let U0 be defined as in Proposition 4.1 with t0 = T ∗. Applying Proposition 4.1, we deduce thatux(x, t) is also uniformly bounded for x ∈ (−∞, s(t)] and t ∈ [T ∗−ε, T ∗) by a constant, denotedU∗. The same Proposition tells us that U∗ only depends on M∗ and also on U0, i.e., the uniformbound of ux(x, T ∗ − ε) for x ∈ (−∞, s(T ∗ − ε)]. Therefore, we can now restart by using thelocal in time existence Theorem 3.1 using as initial time any t0 ∈ [T ∗− ε, T ∗) for a time intervalwhose length does only depend on U∗. Thus, we can extend the solution (u(t), s(t)) to (2.2)after T ∗ and find a continuous extension of M(t) past T ∗. We have reached a contradiction,hence the conclusion of the Theorem follows.
We now show, following Friedman’s ideas [7], that it is possible to extend the solution for ashort (but uniform) time ε for b < 0.
Proposition 4.3. Suppose that the hypotheses of Theorem 3.1 hold and that (u(t), s(t)) is asolution to (2.2) in the time interval [0, t0) for b < 0. There exists ε > 0 small enough suchthat, if
supx∈(−∞,s(t0−ε)]
|ux(x, t0 − ε)| <∞, (4.2)
15

for 0 < ε < t0 thensup
t0−ε<t<t0M(t) <∞.
Although the estimate depends on the bound (4.2), ε does not depend on t0.
Proof. We use the integral formulation (3.8) for M , this time with initial condition at time t0−εfor some fixed ε chosen below, and t ∈ (t0 − ε, t0). Thus
M(t) =− 2
∫ s(t0−ε)
−∞G(s(t), t, ξ, t0 − ε)ux(ξ, t0 − ε)dξ
+ 2
∫ t
t0−εM(τ)Gx(s(t), t, s(τ), τ)dτ − 2
∫ t
t0−εM(τ)Gx(s(t), t, s1(τ), τ)dτ
= : K1 +K2 +K3.
(4.3)
Since s(t) ≥ s(τ), it follows that Gx(s(t), t, s(τ), τ) ≤ 0. Moreover, M ≥ 0, hence K2 ≤ 0 andthis term can be discarded. To estimate K3 let
Φ(t) := supt0−ε<τ<t
M(τ).
Note that
|K3| ≤ Φ(t)
∫ t
t0−ε|Gx(s(t), t, s1(τ), τ)| dτ. (4.4)
To estimate the derivative |Gx(s(t), t, s1(τ), τ)| we use that the nonlinear part of s is an increas-ing function in the case b < 0 as in (3.13). Thus, for ε small enough, we conclude that
s(t)− s1(τ) = s(t)− s(τ)− vRα−1(τ) ≥ |vR| − |b0|ε > 0 . (4.5)
Hence, we can recall the computations in (3.14) to estimate∫ t
t0−ε|Gx(s(t), t, s1(τ), τ)| dτ ≤ C
∫ ∞|vR|−|b0|ε√
8(t−t0+ε)
1
ze−z
2
dz ≤ C∫ ∞|vR|−|b0|ε√
8ε
1
ze−z
2
dz.
It is clear that this last integral can be made less than 1/2 for some small enough ε, which isindependent of t0. Substituting the above inequality into (4.4) we have the estimate |K3| ≤12Φ(t). Finally, note that |K1| ≤ C depending on sup |ux(x, t0− ε)| Combining the estimates forK1,K2,K3 with (4.3) yields
M(t) ≤ 1
2Φ(t) + C.
Taking the supremum on the left hand side, we get that Φ(t) ≤ 2C, for all t ∈ (t0 − ε, t0), asdesired.
Remark. Let us point out that the key estimate (4.5) to get the uniformity of the time intervalwith respect to t0 comes from the fact that the nonlinear part of the free boundary s(t) ismonotone increasing in the case b < 0. For the case b > 0, instead of (4.5) we got (3.16), whichmakes impossible to get a uniform estimate with respect to t0 since m will depend on it.
Combining Proposition 4.3, Theorem 4.2, and 4.1 gives global existence for b < 0, as summarizedin the following result:
Theorem 4.4. Let uI(x) be a non-negative C1((−∞, sI ]) function such that uI(sI) = 0, anduI , (uI)x decay at −∞. Then there exists a unique global classical solution (u(x, t), s(t)) of theequation (2.2) with b < 0 in the sense of Definition 2.2 with initial data uI . Furthermore, thefunction s(t) is a monotone increasing function of t if both b and b0 are negative.
With this the proof of our main Theorem 1.1 is complete. We emphasize that our Theorem4.2 characterizes the possible blow-up of classical solutions in finite time as the time of divergenceof the firing rate N(t).
16

5 Study of the spectrum
In this section we study the spectrum of the linear version µ = 0 of (1.6):
pt − ∂v(vp)− ∂vvp = N(t)δv=vR on (−∞, 0),
whereN(t) = −pv(0, t), p(0, t) = 0.
The objective is to solve the eigenvalue problem{∂vvp+ ∂v(vp)− pv(0)δv=vR = λ p, v ∈ (−∞, 0),
p(0) = 0,(5.1)
with eigenfunctions p(v) in the space L2exp(R) defined as
L2exp(R) :=
{p ∈ L2(R) : ‖p‖L2
exp(R)<∞
},
with norm
‖p‖2L2exp(R)
:=
∫R
(ev
2/2|p(v)|)2
dv.
Note that although problem (5.1) is only defined in (−∞, 0), it can be easily extended to R byodd reflection. Following an idea developed in [11, 12], we consider the equivalent problem to(5.1) defined as
∂vvpλ + ∂v(vpλ) = λ pλ in (−∞, vR) ∪ (vR, 0), (5.2)
with pλ satisfying the following properties:
(F1) pλ ∈ L2exp(R),
(F2) pλ(0) = 0,
(F3) Matching condition: pλ(v+R) = pλ(v−R),
(F4) Jump condition: ∂vpλ(v+R) = ∂vpλ(v−R) + ∂vpλ(0).
We are going to define the solution for (5.1) of the form:
pλ(v) = χ(−∞,vR)p1(v) + χ(vR,0)p
2(v), (5.3)
where each pi(v), i = 1, 2, is a linear combination of the two linearly independent solutions of(5.2) in R, and such that the combination (5.3) satisfies (F1)-(F4).
The functions p1(v) and p2(v) will be calculated by a standard classical method used tocompute the spectrum for the classical Fokker-Planck equation given by L(p) = λp, v ∈ R, with
L(p) := ∂vvp+ ∂v(vp). (5.4)
Define first the eigenspace
L2m(R) =
{p ∈ L2(R) : ‖p‖L2
m(R) <∞},
with norm
‖p‖2L2m(R) :=
∫R
(1 + v2
)m |p(v)|2 dv.
For completeness we recall a well known result on the spectrum for the classical operator L,see for instance [9, 21]:
17

Lemma 5.1. For any m ≥ 0, the spectrum of the operator L defined in (5.4) on L2m(R) is given
byσ(L) =
{λ ∈ C : R(λ) ≤ 1
2 −m}∪ {−n : n ∈ N ∪ {0}} .
Moreover, if m > 12 and if n ∈ N ∪ {0} satisfies n + 1
2 < m, then λn = −n is an isolatedeigenvalue of L, with multiplicity one, and eigenfunction given by the n-th Hermite polynomial
Hn(v) = (−1)nev2/2 d
n
dvne−v
2/2.
In particular, the spectrum of the Fokker-Planck operator L in the space L2exp(R) reduces to the
eigenvaluesλ = −n, n ∈ N ∪ {0}.
It will be very illustrative to give a sketch of the proof of the above Lemma in view of thecomputations for (5.1).
Proof of Lemma 5.1: Given m ∈ N, we seek a solution p ∈ L2m(R) for
pvv + ∂v(vp) = λp, λ ∈ C. (5.5)
The Fourier transform of a function p is defined as
p(ξ) =1√2π
∫Rp(v)e−ivξ dv.
Then, the Fourier transform of (5.5) yields the following first order differential equation
−ξ2p− ξ pξ = λp, ξ ∈ R,
which has solutions given by
p(ξ) =
{ √2π α ξ−λe−ξ
2/2, for ξ > 0,√2π β (−ξ)−λe−ξ2/2, for ξ < 0,
(5.6)
for some constants α, β ∈ C. By inverse Fourier transform we get:
p(v) =1√2π
∫Reivξp(ξ) dξ
= α
∫ +∞
0
eivξξ−λe−ξ2/2 dξ + β
∫ 0
−∞eivξ(−ξ)−λe−ξ
2/2 dξ.
(5.7)
This is, for each λ ∈ C, p is the linear combination of the two linearly independent solutions of(5.5). The constants α, β, λ will be determined from the boundary conditions.
Note that the Fourier transform is an isomorphism from L2m(R) to Hm(R). Thus, λ belongs
to the spectrum of L if and only if the function p from (5.6) belongs to Hm(R). Since p issufficiently smooth and rapidly decaying for any m, provided we stay away from the origin, wejust need to check if p ∈ Hm(0), i.e., all derivatives of p of order less or equal than m are squareintegrable near the origin.
Clearly, the values λ = −n, n ∈ N∪ {0} are special and will be considered later. In order tosee if any other values of λ ∈ C are admissible, we compute a general n-derivative of the term|ξ|−λe−ξ2/2 around ξ = 0 :
∂(n)
∂ξ(n)
[|ξ|−λe−ξ
2/2]≈ c±λ,n|ξ|
−λ−n.
It is easy to see that∂(n)
∂ξ(n)
[|ξ|−λe−ξ
2/2]∈ L2(R)
18

if and only if Re(λ) < 12 −m. Since the spectrum of L is closed, this shows that
σ(L) ⊃ {λ ∈ C R(λ) ≤ 12 −m},
as claimed.Now we study the values λ = −n, n = 1, . . . ,m − 1. Let pn be the corresponding eigen-
function, with Fourier transform given by (5.6). Since pn belongs to Hm near the origin, its
m-derivative will be L2 integrable, while the rest of the derivatives pn, ∂ξpn, . . . , ∂(m−1)ξ (pn)
will be continuous at the origin. This forces to have a very precise values for α, β. In partic-ular, for n even, α = β, while for n odd we must have α = −β. Then we have shown thatλ = −n, n = 1, . . . ,m− 1 are admissible eigenvalues and the corresponding eigenspaces are onedimensional, with eigenfunctions given by the well known Hermite polynomial Hn as
pn(v) = e−v2/2Hn(v).
We consider now the original problem (5.1) and seek for solutions p(v) of the form (5.3).Our first observation is that the values for λ are determined only by the decay of p as v → −∞.Consequently, if we impose that the function p1 belongs to L2
exp(R), then this fixes the possiblevalues of the eigenvalues λ as in Lemma 5.1. In particular, there is no continuous spectrum.Moreover, for each λn = −n, n ∈ N, we must have
p1(v) = αHn(v)e−v2/2, (5.8)
for some α ∈ R.The difference between our problem and the classical Fokker-Planck operator lies in the fact
in the interval (vR, 0) all solutions to the ODE (5.5) for λ = −n as given in (5.7) are admissiblesince the behavior at infinity does no play any role. Nevertheless, we can find a better expressionfor the two linearly independent solutions in (5.7). One of those is the well known (5.8). Theother solution can be easily found by making the following ansatz:
p2(v) = e−v2/2Hn(v)g(v).
By imposing that p2(v) satisfies (5.2) one can obtain an equation for g(v) that reads asfollows:
2H ′ng′ − vg′Hn +Hng
′′ = 0.
This equation has the following general solution:
g(v) = β1
∫ v
v0
es2/2
H2n(s)
ds+ β2,
for some constants β1, β2 ∈ R, and where we have fixed any v0 ∈ (vR, 0) such that Hn(v0) 6= 0 forthe integral to be well defined. Note that g is well defined for all v even where the denominatorvanishes because the Hermite polynomials only have single roots. Consequently we define
p2(v) := β1e−v2/2Hn(v)
∫ v
v0
es2/2
H2n(s)
ds+ β2e−v2/2Hn(v),
and the eigenfunction corresponding to λ = −n is simply
pn(v) =
αe−v
2/2Hn(v), v ∈ (−∞, vR),
β1e−v2/2Hn(v)
∫ v
v0
es2/2
H2n(s)
ds+ β2e−v2/2Hn(v), v ∈ (vR, 0].
(5.9)
19

for some real constants α, β For simplicity, let
θn(v) := Hn(v)
∫ v
v0
es2/2
H2n(s)
ds.
It is clear, by doing a careful Taylor expansion, that if v1 is a root of Hn, then there exists afinite limit for
∆v1,n := limv→v1
θn(v) 6= 0.
Now we are ready to check if (5.9) is an admissible eigenfunction. In the case n is oddinteger, the Hermite polynomial H2n+1 vanishes at zero, but as we have mentioned,
θ2n+1(v)→ ∆0,2n+1 6= 0, as v → 0 for any n ∈ N.
Then in this case condition (F2) is satisfied only when β1 = 0. Then, if we wish p2n+1 to bea continuous function as stated in condition (F3), we must have α = β2 unless H2n+1(vR) = 0that will be considered afterwards. The solution constructed this way does not satisfy condition(F4), so we conclude that 2n+ 1 is not an admissible eigenvalue.
On the other hand, let us check if p2n is an admissible eigenvalue. For even integers it holdsthat H2n(0) 6= 0. Thus we can simply take v0 = 0. Consequently condition (F2) is satisfied ifand only if
β2 = 0. (5.10)
The matching condition (F3) implies
αH2n(vR) = β1H2n(vR)
∫ vR
0
es2/2
H2n(s)
ds. (5.11)
Here we do need to distinguish two cases: if vR is not a root for any H2n, then the above equalityimplies
α = β1
∫ vR
0
es2/2
H2n(s)
ds. (5.12)
If instead H2n(vR) = 0 (note that Hermite polynomials only have single roots), one can repeata Taylor expansion around vR for θ2n(v) and see that
θ2n(v)→ ∆vR,2n 6= 0, as v → vR.
Consequently (5.11) cannot be satisfied for these n such that H2n(vR) = 0.Using conditions (5.10) and (5.12) for pn we get
p2n(v) = β1e−v2/2H2n(v) ·
∫ vR
0
es2/2
H22n(s)
ds, v ∈ (−∞, vR),∫ v
0
es2/2
H22n(s)
ds, v ∈ (vR, 0].
(5.13)
One can easily check that the jump condition (F4) is satisfied if and only if
H2n(0) = H2n(vR). (5.14)
Summarizing, we have shown the following:
Theorem 5.2. Consider the operator{∂vvp+ ∂v(vp)− pv(0)∆v=vR = λ p, v ∈ (−∞, 0]
p(0) = 0,
subject to conditions (F1) - (F4).
20

1. There is no continuous spectrum.
2. The value λ = 0 is an eigenvalue with a one-dimensional eigenspace spanned by the function
p∞(v) =
e−v
2/2 v ∈ (−∞, vR),
α0e−v2/2
∫ 0
v
ev2/2 dv v ∈ (vR, 0],
for
α0 :=
(∫ 0
vR
ev2/2 dv
)−1.
3. There exists a countable set S ⊂ R such that for all vR 6∈ S, there are no other eigenvalues.
4. If n and vR happen to satisfy the compatibility condition (5.14), then λ = −2n is aneigenvalue with eigenspace of finite dimension spanned by the eigenfunction p2n(v) definedin (5.13).
Remark. We remark that the steady state p∞(v) was previously obtained in [11, 3]. In thislast paper, it was also shown exponential decay towards equilibrium p∞. However, the speed ofconvergence is unknown and the spectral analysis does not seem to give any insight.
Acknowledgements. JAC and MdG are partially supported by the project MTM2011-27739-C04 DGI-MCI (Spain) and 2009-SGR-345 from AGAUR-Generalitat de Catalunya. MPG issupported by NSF-DMS 0807636 and DMS-1109682. MS is partially supported by the NSFGrant DMS-0900909. MS was supported by the sabbatical program of the MEC-Spain GrantSAB2009-0024.
References
[1] N. Brunel and V. Hakim V: Fast global oscillations in networks of integrate-and-fire neu-rons with long fiting rates. Neural Computation, 11:1621–1671, 1999.
[2] N. Brunel, Dynamics of sparsely connected networks of excitatory and inhibitory spikingnetworks. J. Comp. Neurosci., 8:183–208, 2000.
[3] M. J. Caceres, J. A. Carrillo, and B. Perthame, Analysis of nonlinear noisy integrate&fireneuron models: blow-up and steady states, to appear in J. Math. Neuroscience.
[4] M. J. Caceres, J. A. Carrillo, and L. Tao, A numerical solver for a nonlinear Fokker-Planckequation representation of neuronal network dynamics, J. Comp. Phys., 230:1084–1099,2011.
[5] J. A. Carrillo and G. Toscani, Asymptotic L1-decay of solutions of the porous mediumequation to self-similarity, Indiana Univ. Math. J. 49:113–141, 2000.
[6] A. Compte, N. Brunel, P.S. Goldman-Rakic, and X.J. Wang, Synaptic mechanisms andnetwork dynamics underlying spatial working memory in a cortical network model, CerebralCortex, 10:910–923, 2000.
[7] A. Friedman, Partial differential equations of parabolic type, Prentice Hall, inc, EnglewoodCliffs, N.J. 1964.
[8] A. Friedman, Free boundary problems for parabolic equations I. Melting of solids, J. ofMath. and Mech., 8:499–518, 1959.
[9] T. Gallay and G. Raugel. Scaling variables and asymptotic expansions in damped waveequations. J. Differential Equations, 150(1):42–97, 1998.
[10] W. Gerstner and W. Kistler, Spiking neuron models, Cambridge: Cambridge Univ. Press2002.
21

[11] M. d. M. Gonzalez and M. P. Gualdani, Asymptotics for a symmetric equation in priceformation, Appl. Math. Optim., 59(2):233–246, 2009.
[12] M. d. M. Gonzalez and M. P. Gualdani. Asymptotics for a free-boundary problem in priceformation, Nonlinear Analysis, 74, pp. 3269-3294, 2011.
[13] T. Guillamon, Una introduccio a les matematiques de lactivitat neuronal, Butl. Soc. Cata-lana Mat., 19:25–45, 2004.
[14] L. Lapicque, Recherches quantitatives sur l’excitation electrique des nerfs traitee commeune polarisation, J. Physiol. Pathol. Gen., 9:620–635, 1907.
[15] M. Mattia, P. Del Giudice, Population dynamics of interacting spiking neurons, Phys.Rev. E, 66:051917, 2002.
[16] A. M. Meirmanov, The Stefan problem, volume 3 of de Gruyter Expositions in Mathemat-ics, Walter de Gruyter & Co., Berlin, 1992.
[17] K. Newhall, G. Kovacic, P. Kramer, A.V. Rangan, and D. Cai, Cascade-Induced Synchronyin Stochastically-Driven Neuronal Networks, Phys. Rev. E., 82:041903, 2010.
[18] K. Newhall, G. Kovacic, P. Kramer, D. Zhou, A.V. Rangan, and D. Cai, Dynamics ofCurrent-Based, Poisson Driven, Integrate-and-Fire Neuronal Networks, Comm. in Math.Sci., 8:541–600, 2010.
[19] A. Omurtag, B.W. Knight, and L. Sirovich, On the Simulation of Large Populations ofNeurons, J. Comp. Neurosci., 8:51–63, 2000.
[20] A. Renart, N. Brunel, and X.J. Wang, Mean-Field Theory of Irregularly Spiking NeuronalPopulations and Working Memory in Recurrent Cortical Networks, In Computational Neu-roscience: A comprehensive approach. Edited by Feng J, Chapman & Hall/CRC Mathe-matical Biology and Medicine Series 2004.
[21] H. Risken, The Fokker-Planck equation, Volume 18 of Springer Series in Synergetics.Berlin: Springer-Verlag, second edition 1989. [Methods of solution and applications].
[22] L. Sirovich, A. Omurtag, and K. Lubliner, Dynamics of neural populations: Stability andsynchrony, Network: Computation in Neural Systems, 17:3–29, 2006.
[23] H. Tuckwell, Introduction to Theoretical Neurobiology. Cambridge, Cambridge Univ. Press1988.
22













![[Dutch Profile] - Fokker T.v 'Luchtkruiser](https://img.pdfslide.us/doc/110x75/55cf98ce550346d03399c875/dutch-profile-fokker-tv-luchtkruiser.jpg)