Embed Size (px)
Citation preview

Circuit equationsin time domain and frequency
domain
EO2 – Lecture 5
Pavel Máša
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

• In last semester we studied circuit equations in DC and AC circuits
What is the same and what is different when we will write circuit equations in time domain or in operational form, or in DC or AC circuits?
Circuit equations, regardless of used mathematical apparatus, are always mathematical formulation of Kirchhoff’s laws:
INTRODUCTION
MESH (LOOP) ANALYSIS – KVLX
k
Uk = 0X
k
Uk = 0
NODAL ANALYSIS – KCLX
k
Ik = 0X
k
Ik = 0
voltage across R, L, C is qualified by means of current
current, passing R, L, C is qualified by means of voltage
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

RELATIONSHIP BETWEEN VOLTAGE AND CURRENT
Circuit element Time domain DC AC / Fourier Laplace
R
L
short
C
open circuit
usage transient analysis
usually DC/ AC analysis has to be also proceeded
Steady state withDC source
AC – steady state withsine wave source
Fourierseries – steady state with periodical excitation
transform – pulse excitation
General application
contains both steady andtransient components
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

( ) ( )CC
q Cudqidt
du ti t C
dt
=
=
=
( )C
C
Lidu tdt
Φ =
Φ=
Energetic initial conditions – since energy is continuous, energetic circuit variables are also continuous
INITIAL CONDITIONS
uC(0¡) = uC(0+)uC(0¡) = uC(0+)must be iC(0¡) 6= iC(0+)iC(0¡) 6= iC(0+)may be
may be uL(0¡) 6= uL(0+)uL(0¡) 6= uL(0+) must be iL(0¡) = iL(0+)iL(0¡) = iL(0+)
uL(0¡)uL(0¡)
uL(0+)uL(0+)
iL(0¡)iL(0¡) iL(0+)iL(0+)
History of capacitor describes charge stored in the capacitor voltageHistory of inductor describes magnetic flux passing the inductor electric current
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

• Mesh analysis– Current in the loop, where we currently write the equation has always positive sign– Other currents passing circuit element, where we currently evaluate voltage, have positive
voltage, when they have same orientation, negative, when they have opposite orientation– Voltage sources have positive sign, when the current in the loop, where we currently write
the equation, flows into positive source terminal, and negative, when it flows into negative terminal
– We could not write an equation in loops, passing current sources, but we have to count current sources in closed loops
• Nodal voltages– Voltage in the node, where we write an equation, has always positive sign– Voltages in adjacent nodes, with the exception of voltage sources, have always negative
sign (we suppose, all currents leaves the node, actual orientation results from solution of system of equations; circuit element voltage, is the difference of electric potentials)
– Voltage sources in adjacent nodes have negative sign, when they are connected by positive terminal to the adjacent node (we subtract them), positive, if they are connected by negative terminal
– Current of the current source has positive sign, if it leaves the node, negative, it runs into the node
– When the voltage source is not connected by any terminal with reference node (ground), then we refer it as floating source – we write just one equation for both nodes (where the floating source is connected.
BASIC RULES – SIGNS, …
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

Reduction of number of equations
DC
AC
Time domain not possible
Laplace
DC
AC
Time domain
Laplace
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

COUPLED INDUCTORS (TRANSFORMER)
u1(t) = L1di1(t)
dt+ M
di2(t)
dtu1(t) = L1
di1(t)
dt+ M
di2(t)
dt
u2(t) = L2di2(t)
dt+ M
di1(t)
dtu2(t) = L2
di2(t)
dt+ M
di1(t)
dt
Time domain – mesh analysis
Laplace transform – mesh analysisU1(p) = pL1I1(p)¡L1i1(0+) + pMI2(p)¡Mi2(0+)U1(p) = pL1I1(p)¡L1i1(0+) + pMI2(p)¡Mi2(0+)
U2(p) = pL2I2(p)¡L2i2(0+) + pMI1(p)¡Mi1(0+)U2(p) = pL2I2(p)¡L2i2(0+) + pMI1(p)¡Mi1(0+)
I2(p) =U2(p) + L2i2(0+)¡ pMI1(p) + Mi1(0+)
pL2I2(p) =
U2(p) + L2i2(0+)¡ pMI1(p) + Mi1(0+)
pL2
– nodal voltages
U1(p) = pL1I1(p)¡L1i1(0+)+pMU2(p) + L2i2(0+)¡ pMI1(p) + Mi1(0+)
pL2¡Mi2(0+)U1(p) = pL1I1(p)¡L1i1(0+)+pM
U2(p) + L2i2(0+)¡ pMI1(p) + Mi1(0+)
pL2¡Mi2(0+)
1
2
3
I1(p) =1
p
L2
L1L2 ¡M 2U1(p)¡ 1
p
M
L1L2 ¡M2U2(p)¡
i1(0+)
p=
1
p¡1U1(p) +
1
p¡MU2(p) ¡ i1(0+)
pI1(p) =
1
p
L2
L1L2 ¡M 2U1(p)¡ 1
p
M
L1L2 ¡M2U2(p)¡
i1(0+)
p=
1
p¡1U1(p) +
1
p¡MU2(p) ¡ i1(0+)
p
I2(p) =1
p¡MU1(p) +
1
p¡2U2(p)¡
i2(0+)
pI2(p) =
1
p¡MU1(p) +
1
p¡2U2(p)¡
i2(0+)
p
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

R1 L
C R2
Example:
DC:
AC:
Mesh analysis – 0 equations, voltages across R1 and R2 is evaluated by Ohm’s law
j!L I1+R2I1+1
j!C(I1¡I) = 0 ) I1 =
I
(j!)2LC + j!R2C + 1j!L I1+R2I1+
1
j!C(I1¡I) = 0 ) I1 =
I
(j!)2LC + j!R2C + 1
Time domain:
Ldi1(t)
dt+ R2i1(t) +
1
C
Z t
0
[i1(¿ )¡ i(¿ )] d¿ ¡ uC(0) = 0Ldi1(t)
dt+ R2i1(t) +
1
C
Z t
0
[i1(¿ )¡ i(¿ )] d¿ ¡ uC(0) = 0
Solution is obtained in three steps:1. Initial condition uC(0) – DC or AC analysis has to be proceeded according to the nature of exciting source before the change2. Solution of integral‐differential equation – solution of the transient3. To find steady state in the circuit after transient is over we have to proceed DC or AC analysis again
iL(0)iL(0)uC(0)uC(0)
Usage – transients – describing currents or voltages in circuit after• Source was connected• Source was disconnected• Circuit layout has been changed• Some circuit element parameters (resistivity, capacitance, inductance)
DC or AC analysis always has to be proceededXE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

Laplace: pL I1(p)¡LiL(0) + R2I1(p) +1
pC[I1(p)¡ I(p)]¡uC(0)
p= 0pL I1(p)¡LiL(0) + R2I1(p) +
1
pC[I1(p)¡ I(p)]¡uC(0)
p= 0
) I1(p) =I(p)+CuC(0) + pLCiL(0)
p2LC + pR2C + 1) I1(p) =
I(p)+CuC(0) + pLCiL(0)
p2LC + pR2C + 1The solution is obtained in two steps:
1. Initial condition uC(0) DC or AC analysis has to be proceeded according to the nature of exciting source before the change (same as time domain)
2. Solve inverse transform I1(p) – it contains both transient and steady state after transient dies away
• To find initial conditions, we have to proceed DC or AC analysis as well• Inverse Laplace transform always corresponds to transient when
source I(p) is connected to the circuit (if it is present in the equation), orsource is disconnected (then the steady state is „hidden“ in the initial conditions)
The transient is integral part of Laplace transform solution, the result of time interval restriction‐ each source is zero when t < 0, because ,
• The solution of operational circuit equations contains also steady state after transient dies away• Although operational solution is formally similar to the AC analysis, it is different – „more complete“ solution
u(t) = u0(t)1(t)u(t) = u0(t)1(t) i(t) = i0(t)1(t)i(t) = i0(t)1(t)
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

• Now assume following values: R2 = 1 kΩ, L = 1H, C = 1 μF, R1 = 2 kΩ• DC – Circuit supplied by current source I = 10 mA
• AC – circuit supplied from sinusoidal current source
• Time domain – at time t = 0 was connected sinusoidal current source. At t < 0 the circuit was without energy.
1. Initial condition is given – uc(0) = 0
2. We solve integral‐differential equation (in detail it will be described on 8th lecture)
a) Derive
b) Solve using method of variation of parameters
U2 = R2I = 1000 ¢ 0:01 = 10 VU2 = R2I = 1000 ¢ 0:01 = 10 V U1 = R1I = 2000 ¢ 0:01 = 20 VU1 = R1I = 2000 ¢ 0:01 = 20 V
i(t) = 10 sin(1000t) mAi(t) = 10 sin(1000t) mA
I1 =I
(j!)2LC + j!R2C + 1=
0:01
(j ¢ 1000)2 ¢ 1 ¢ 10¡6 + j ¢ 1000 ¢ 1000 ¢ 10¡6 + 1= 10e¡
¼2 j mAI1 =
I
(j!)2LC + j!R2C + 1=
0:01
(j ¢ 1000)2 ¢ 1 ¢ 10¡6 + j ¢ 1000 ¢ 1000 ¢ 10¡6 + 1= 10e¡
¼2 j mA
i(t) = 10 sin(1000t) mAi(t) = 10 sin(1000t) mA
Ldi1(t)
dt+ R2i1(t) +
1
C
Z t
0
[i1(¿ )¡ i(¿ )] d¿ ¡ uC(0) = 0Ldi1(t)
dt+ R2i1(t) +
1
C
Z t
0
[i1(¿ )¡ i(¿ )] d¿ ¡ uC(0) = 0
Ld2 i1(t)
dt2+ R2
d i1(t)
dt+
i1(t)¡ i(t)
C= 0L
d2 i1(t)
dt2+ R2
d i1(t)
dt+
i1(t)¡ i(t)
C= 0
¸2 +R2
L¸ +
1
LC= 0 ) ¸2 + 1000¸ + 106 = 0¸2 +
R2
L¸ +
1
LC= 0 ) ¸2 + 1000¸ + 106 = 0
¸1;2 = ¡500§p
5002 ¡ 106 = ¡500§ 866:03j¸1;2 = ¡500§p
5002 ¡ 106 = ¡500§ 866:03j
i1(t) = [K1 cos(866:03t) + K2 sin(866:03t)] e¡500t + 0:01 sin(1000t¡ ¼
2)| {z }
AC solved above
i1(t) = [K1 cos(866:03t) + K2 sin(866:03t)] e¡500t + 0:01 sin(1000t¡ ¼
2)| {z }
AC solved above
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

• Laplace
I1(p) =I(p)
p2LC + pR2C + 1=
0:01¢1000p2+10002
p2 ¢ 1 ¢ 10¡6 + p ¢ 1000 ¢ 10¡6 + 1=
0:01 ¢ 1000
p2 + 10002
106
p2 + 1000p + 106
=1000 + p
p2 + 1000p + 106¡ p
p2 + 106=
= 0:01
"p + 500
(p + 500)2 + (500p
3)2+
1p3
500p
3
(p + 500)2 + (500p
3)2¡ p
p2 + 106
#I1(p) =
I(p)
p2LC + pR2C + 1=
0:01¢1000p2+10002
p2 ¢ 1 ¢ 10¡6 + p ¢ 1000 ¢ 10¡6 + 1=
0:01 ¢ 1000
p2 + 10002
106
p2 + 1000p + 106
=1000 + p
p2 + 1000p + 106¡ p
p2 + 106=
= 0:01
"p + 500
(p + 500)2 + (500p
3)2+
1p3
500p
3
(p + 500)2 + (500p
3)2¡ p
p2 + 106
#
i(t) = 10 e¡500 t
·cos
³500
p3t
´+
1p3
sin³500
p3t
´¸+10 sin
³1000 t¡ ¼
2
´mAi(t) = 10 e¡500 t
·cos
³500
p3t
´+
1p3
sin³500
p3t
´¸+10 sin
³1000 t¡ ¼
2
´mA
We don’t solve any AC, steady state is part of solution
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

266666664
loop I1z }| {R1 +
1
pC
branch 12z }| {¡ 1
pC
¡ 1
pC| {z }branch 21
pL + R2 +1
pC| {z }loop I2
377777775¢"I1(p)
I2(p)
#=
24 U (p)¡ uC(0+)p
uC(0+)p + LiL(0+)
35266666664
loop I1z }| {R1 +
1
pC
branch 12z }| {¡ 1
pC
¡ 1
pC| {z }branch 21
pL + R2 +1
pC| {z }loop I2
377777775¢"I1(p)
I2(p)
#=
24 U (p)¡ uC(0+)p
uC(0+)p + LiL(0+)
35
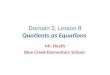
R1I1(p) +1
pC[I1(p)¡ I2(p)] +
uC(0)
p¡ U (p) = 0R1I1(p) +
1
pC[I1(p)¡ I2(p)] +
uC(0)
p¡ U (p) = 0
pLI2(p)¡ LiL(0) + R2I2(p)¡ uC(0)
p+
1
pC[I2(p)¡ I1(0)] = 0pLI2(p)¡ LiL(0) + R2I2(p)¡ uC(0)
p+
1
pC[I2(p)¡ I1(0)] = 0
R1 L
C R2
uC(0)uC(0)uC(0)
puC(0)
p
iL(0)iL(0)
LiL(0)LiL(0)
U(p)U(p) I1(p)I1(p) I2(p)I2(p)
24R1 + 1j!C ¡ 1
j!C
¡ 1j!C j!L + R2 + 1
j!C
35 ¢24I1
I2
35 =
"U
0
#24R1 + 1j!C ¡ 1
j!C
¡ 1j!C j!L + R2 + 1
j!C
35 ¢24I1
I2
35 =
"U
0
#
R1i1(t) +1
C
Z t
0
[i1(¿ )¡ i2(¿ )] d¿ + uC
(0+)¡ u(t) = 0R1i1(t) +1
C
Z t
0
[i1(¿ )¡ i2(¿ )] d¿ + uC
(0+)¡ u(t) = 0
Ldi2(t)
dt+ R2i2(t)¡ u
C(0+) +
1
C
Z t
0
[i2(¿ )¡ i1(¿ )] d¿ = 0Ldi2(t)
dt+ R2i2(t)¡ u
C(0+) +
1
C
Z t
0
[i2(¿ )¡ i1(¿ )] d¿ = 0
Time domain:
Laplace:
AC:
Matrix notation
Mesh analysis:
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

R1 L
C R2
266666664
node U1z }| {1
R1+ pC +
1
pL
branch between nodes 1, 2z }| {¡ 1
pL
¡ 1
pL| {z }branch between nodes 2, 1
1
pL+
1
R2| {z }node U2
377777775¢"U1(p)
U2(p)
#=
24U(p)R1
+ CuC(0+)¡ iL(0+)p
iL(0+)p
35266666664
node U1z }| {1
R1+ pC +
1
pL
branch between nodes 1, 2z }| {¡ 1
pL
¡ 1
pL| {z }branch between nodes 2, 1
1
pL+
1
R2| {z }node U2
377777775¢"U1(p)
U2(p)
#=
24U(p)R1
+ CuC(0+)¡ iL(0+)p
iL(0+)p
35
U1(p)¡ U(p)
R1+
U1(p)¡ U2(p)
pL+ pCU1(p)¡ CuC(0) +
iL(0)
p= 0
U1(p)¡ U(p)
R1+
U1(p)¡ U2(p)
pL+ pCU1(p)¡ CuC(0) +
iL(0)
p= 0
U2(p)¡ U1(p)
pL+
U2(p)
R2¡ iL(0)
p= 0
U2(p)¡ U1(p)
pL+
U2(p)
R2¡ iL(0)
p= 0
U(p)U(p)
CuC(0)CuC(0)
iL(0)p
iL(0)p
U1(p)U1(p) U2(p)U2(p)
24 1R1
+ j!C + 1j!L ¡ 1
j!L
¡ 1j!L
1j!L + 1
R2
35 ¢24U1
U2
35 =
24 UR1
0
3524 1R1
+ j!C + 1j!L ¡ 1
j!L
¡ 1j!L
1j!L + 1
R2
35 ¢24U1
U2
35 =
24 UR1
0
35
u1(t)¡ u(t)
R1+
1
L
Z t
0
[u1(¿)¡ u2(¿ )] d¿ + Cdu1(t)
dt+ iL(0) = 0
u1(t)¡ u(t)
R1+
1
L
Z t
0
[u1(¿)¡ u2(¿ )] d¿ + Cdu1(t)
dt+ iL(0) = 0
1
L
Z t
0
[u2(¿)¡ u1(¿)] d¿ +u2(t)
R2¡ iL(0) = 0
1
L
Z t
0
[u2(¿)¡ u1(¿)] d¿ +u2(t)
R2¡ iL(0) = 0
Time domain:
Laplace:
AC:
Matrix notation
Nodal analysis:
Be careful – if circuit contains controlled sources,it is necessary introduce other, more complicated rulesfor direct writing of matrices (nulor model)!!!
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a

It is suitable for DC, AC, LaplaceGaussian elimination solution, Cramer’s rule, inverse matrix – very easy with mathematical computer programs (Matlab, Maple, …)
Could not be used in time domain
CIRCUIT EQUATIONS – MATRIX NOTATION
XE31EO2 - Pavel Máša - Lecture 5
XE31EO2 -
Pav
el Máš
a










![Convergence analysis of domain decomposition based … · Convergence analysis of domain decomposition based time integrators for degenerate parabolic equations ... [9, Chapter 1]](https://img.pdfslide.us/doc/110x75/5b30b9aa7f8b9ae16e8e78ce/convergence-analysis-of-domain-decomposition-based-convergence-analysis-of-domain.jpg)