Embed Size (px)
Citation preview
Before the fi rst fl ight:Read the Chroma manual in its entirety. Familiarize yourself with the functions of the quadcopter, transmitter and CGO camera before fl ying.Check the weather conditions of the intended area of operation, including wind speeds at the intended fl ight altitude. Do not attempt to fl y in greater than 15 mph wind.Remove the CGO camera and perform several short, close-in fl ights to familiarize yourself with the fl ight controls and how the quadcopter reacts before reattaching the camera.
Before every fl ight:Closely follow the instructions in the Chroma manual to perform a Compass Calibration. Check the weather conditions of the intended area of operation, including wind speeds at the intended fl ight altitude.Do not attempt to fl y in greater than 15 mph wind.
Loss of GPS signal lock:A loss of GPS signal lock is known as “white mode” and causes all other fl ight modes to be disabled. Loss of GPS in fl ight is indicated by all LEDs on the quadcopter glowing solid white. The quadcopter must be recovered manually if a GPS signal is lost while in fl ight. Loss of signal, while rare, can occur for a variety of reasons:
E lectromagnetic interference – Flying near power lines (both buried and visible), large electrical transformers or during a solar fl are.L arge obstructions – Flying around tall buildings, large trees or dense cloud cover.Flying in high wind – The onboard GPS unit automatically compensates for wind to hold position. Strong winds can overwhelm the unit, pushing the
quadcopter out of position and forcing it into “white mode.” The quadcopter should not be fl own in greater than 15 mph wind.
If you are using the ST-10 transmitter and you lose GPS signal lock while in fl ight:1. Do not panic and do not attempt to use Return Home. 2. Do not decrease the throttle. Decreasing the throttle will cause the quadcopter to lose altitude and possibly crash. 3. Two options are available for recovery of the Chroma: attempt to manually fl y the quadcopter back to your position to land or land it in place and
retrieve it. If you are landing the quadcopter in place, proceed to step 7.4. If the quadcopter is a long distance away and is diffi cult to see, look at the ST-10 transmitter screen and fi nd the Green compass arrow. You can use this as
a guide to fl y the quadcopter closer to your position until you can confi dently fl y by line-of-sight.
5. Move the pitch/roll control (right transmitter stick) in the direction the arrow is pointing to carefully guide the quadcopter back to you.Adjust the quadcopter’s speed by increasing or decreasing the amount of pitch and roll. To give yourself more time to react, do not attemptto fl y at a high rate of speed.
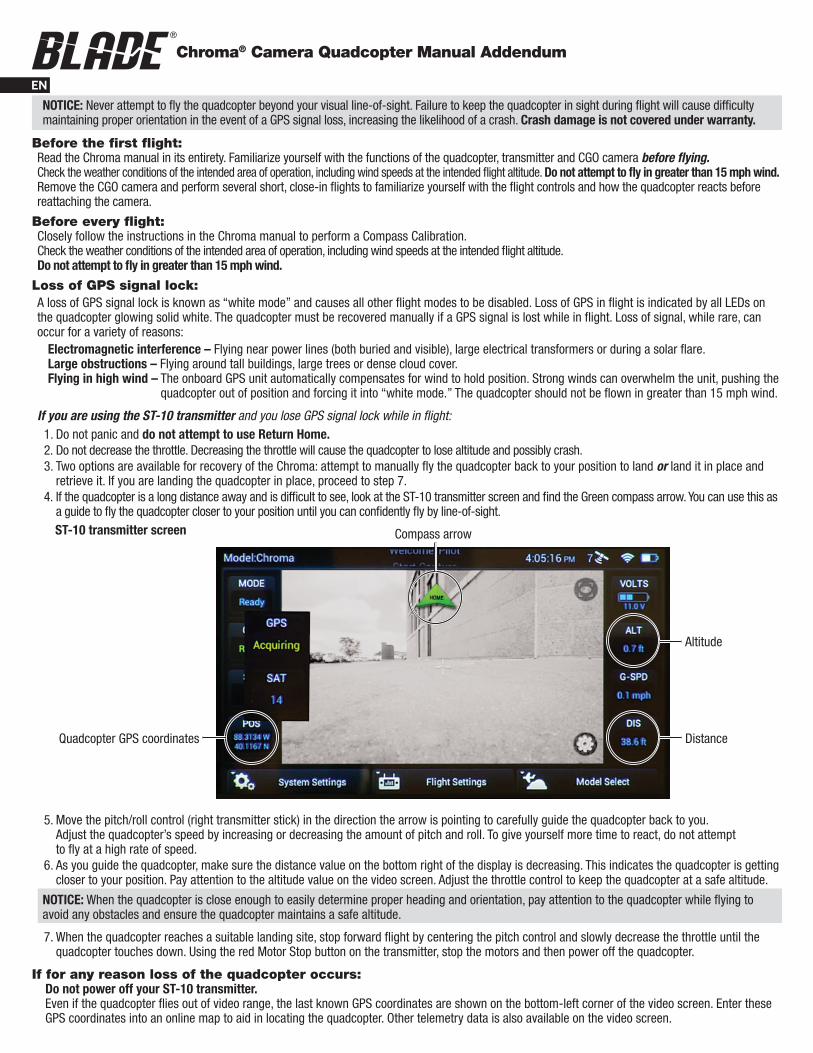
6. As you guide the quadcopter, make sure the distance value on the bottom right of the display is decreasing. This indicates the quadcopter is getting closer to your position. Pay attention to the altitude value on the video screen. Adjust the throttle control to keep the quadcopter at a safe altitude.
NOTICE: When the quadcopter is close enough to easily determine proper heading and orientation, pay attention to the quadcopter while fl ying to avoid any obstacles and ensure the quadcopter maintains a safe altitude.
7. When the quadcopter reaches a suitable landing site, stop forward fl ight by centering the pitch control and slowly decrease the throttle until the quadcopter touches down. Using the red Motor Stop button on the transmitter, stop the motors and then power off the quadcopter.
If for any reason loss of the quadcopter occurs:Do not power off your ST-10 transmitter. Even if the quadcopter fl ies out of video range, the last known GPS coordinates are shown on the bottom-left corner of the video screen. Enter these GPS coordinates into an online map to aid in locating the quadcopter. Other telemetry data is also available on the video screen.
Chroma® Camera Quadcopter Manual Addendum
ST-10 transmitter screen
DistanceQuadcopter GPS coordinates
Compass arrow
Altitude
NOTICE: Never attempt to fl y the quadcopter beyond your visual line-of-sight. Failure to keep the quadcopter in sight during fl ight will cause diffi culty maintaining proper orientation in the event of a GPS signal loss, increasing the likelihood of a crash. Crash damage is not covered under warranty.
EN
If you are using the DX4 or another BNF transmitter and you lose GPS signal lock while in fl ight:1. Do not panic and do not attempt to use Return Home.
2. Do not decrease the throttle. Decreasing the throttle will cause the quadcopter to lose altitude and possibly crash. 3. Two options are available for recovery of the Chroma: attempt to manually fl y the quadcopter back to your position to land or land it in place and
retrieve it. If you are landing the quadcopter in place, proceed to step 5.
NOTICE: Only attempt to fl y the quadcopter back to your position if you are comfortable with controlling it manually in AP mode, and it is close enough to visually determine the proper orientation of the quadcopter.
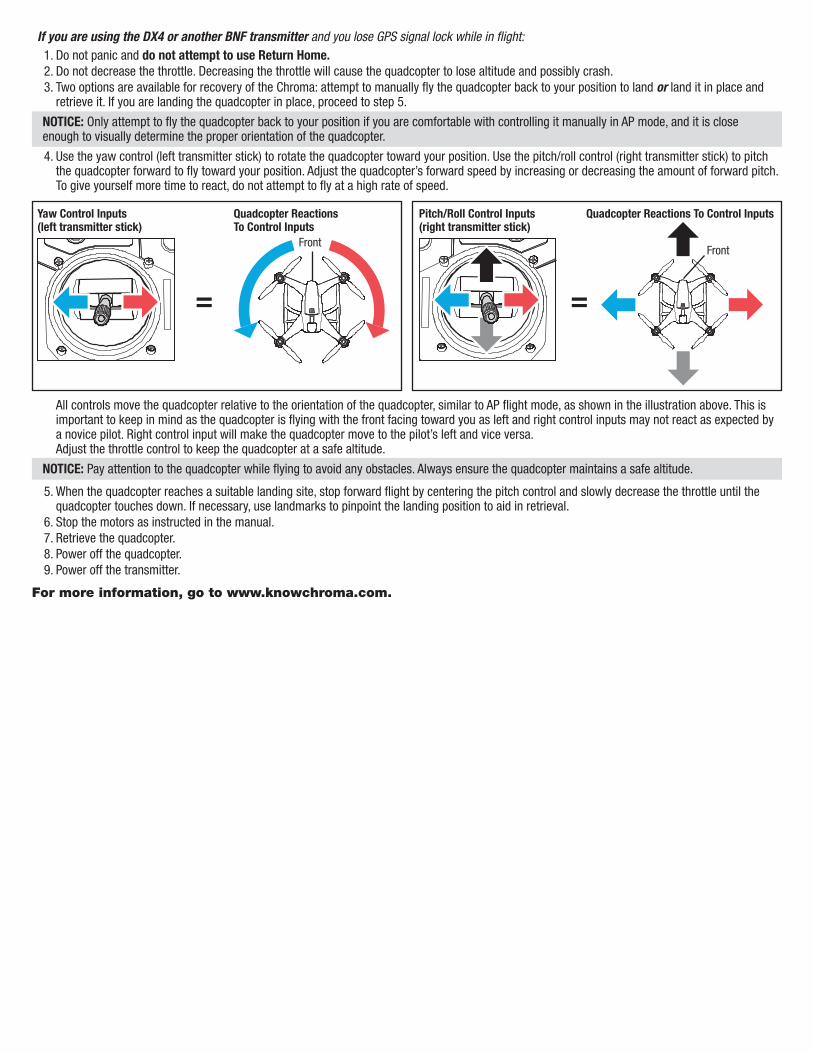
4. Use the yaw control (left transmitter stick) to rotate the quadcopter toward your position. Use the pitch/roll control (right transmitter stick) to pitch the quadcopter forward to fl y toward your position. Adjust the quadcopter’s forward speed by increasing or decreasing the amount of forward pitch. To give yourself more time to react, do not attempt to fl y at a high rate of speed.
All controls move the quadcopter relative to the orientation of the quadcopter, similar to AP fl ight mode, as shown in the illustration above. This is important to keep in mind as the quadcopter is fl ying with the front facing toward you as left and right control inputs may not react as expected by a novice pilot. Right control input will make the quadcopter move to the pilot’s left and vice versa.Adjust the throttle control to keep the quadcopter at a safe altitude.
NOTICE: Pay attention to the quadcopter while fl ying to avoid any obstacles. Always ensure the quadcopter maintains a safe altitude.
5. When the quadcopter reaches a suitable landing site, stop forward fl ight by centering the pitch control and slowly decrease the throttle until the quadcopter touches down. If necessary, use landmarks to pinpoint the landing position to aid in retrieval.
6. Stop the motors as instructed in the manual.7. Retrieve the quadcopter.8. Power off the quadcopter.9. Power off the transmitter.
For more information, go to www.knowchroma.com.
=
Front
Pitch/Roll Control Inputs(right transmitter stick)
Quadcopter Reactions To Control Inputs
=
Front
Yaw Control Inputs(left transmitter stick)
Quadcopter ReactionsTo Control Inputs
DE
Vor dem ersten Flug:Bitte lesen Sie die Bedienungsanleitung gründlich. Machen Sie sich vor dem Fliegen mit der Fernsteuerung, der Kamera und dem Quadcopter vertraut. Prüfen Sie auf dem Flugfeld die Wetterbedingungen, inklusive der Windgeschwindigkeit und der Höhe. Fliegen Sie nicht bei Windgeschwindigkeiten über 24 km/h. Nehmen Sie die Kamera ab und führen erste kurze Flüge durch um sich mit den Reaktionen des Copters vertraut zu machen, bevor Sie die Kamera wieder anschließen.
Vor jedem Flug: Folgen Sie sehr gründlich den Anweisungen um die Kompasskalibrierung durchzuführen.Prüfen Sie auf dem Flugfeld die Wetterbedingungen, inklusive der Windgeschwindigkeit und der Höhe.Fliegen Sie nicht bei Windgeschwindigkeiten über 24 km/h.
Verlust des GPS Signals.Der Verlust des GPS Signals wird als Weisser Mode bezeichnet und deaktiviert alle andere Flugmodes. So wird der Verlust des GPS Signals durch weisses Leuchten der LED angezeigt. In diesem Fall muß der Quadcopter manuell gefl ogen und gelandet werden. Ein GPS Signalverlust geschieht selten, kann aber verschiedene Ursachen haben:
Elektromagnetische Störungen - Möglich in der Nähe von ober- und unterirdischen Stromleitungen, großen Transformatoren oder während eines Sonnensturmes. Große Hindernisse - Bei dem Fliegen um große Gebäude, Bäumen oder unter dichter Bewölkung. Hohe Windgeschwindigkeiten: das eingebaute GPS versucht die Windgeschwindigkeit über die Motoren zu kompensieren. Zu hohe Windgeschwindigkeiten können die Einheit dabei überlasten. Der Quadcopter wird aus der Position abgetrieben und wechselt dann in den weißen Mode. Fliegen Sie nicht bei Windgeschwindigkeiten über 24 km/h.
Bei Verwendung des ST 10 Senders und GPS Verlustes im Flug: 1. Keine Panik bekommen und nicht die Rückkehrfunktion (Return Home) aktivieren.2. Verringern Sie nicht das Gas. Reduziertes Gas bedeutet Höhenverlust und einen möglichen Absturz.3. Für die Rettung des Chromas gibt es zwei Möglichkeiten: Versuchen Sie den Chroma manuell zum Startpunkt zurück zu fl iegen oder landen ihn da wo er
sich gerade befi ndet. Sollte Sie den Quadcopter an der aktuellen Position landen fahren Sie mit Schritt 7 fort. 4. Sollte sich der Quadcopter in größerer Entfernung befi nden und Sie können ihn schlecht sehen, gucken Sie auf das Display und nehmen die grüne
Kompassanzeige zur Hilfe den Copter wieder näher an ihre Position zu bringen, wo Sie ihn wieder auf Sicht steuern können.
5. Bewegen Sie den Pitch / Roll Steuerhebel (rechter Steuerknüppel) in die Richtung in die der Pfeil deutet um den Copter vorsichtig zurück zu fl iegen. Regeln Sie die Geschwindigkeit durch den Pitch und Roll Anteil. Vermeiden Sie große Steuerausschläge, damit Sie mehr Zeit zum reagieren haben.
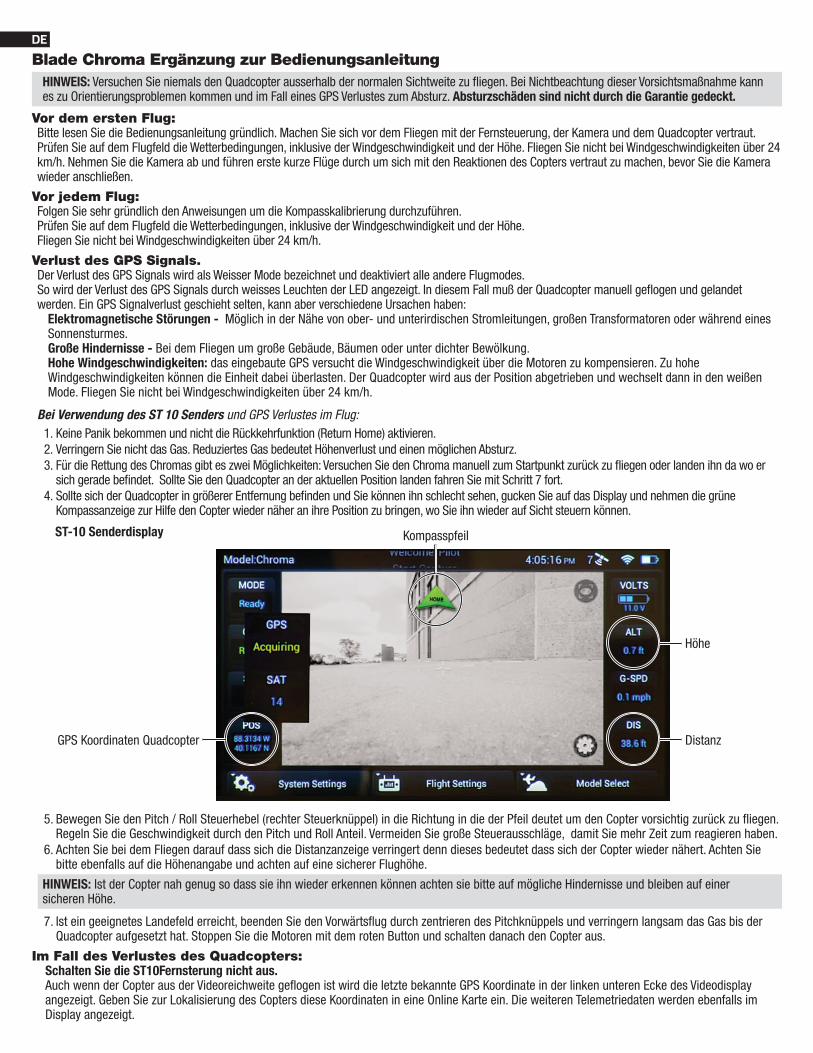
6. Achten Sie bei dem Fliegen darauf dass sich die Distanzanzeige verringert denn dieses bedeutet dass sich der Copter wieder nähert. Achten Sie bitte ebenfalls auf die Höhenangabe und achten auf eine sicherer Flughöhe.
HINWEIS: Ist der Copter nah genug so dass sie ihn wieder erkennen können achten sie bitte auf mögliche Hindernisse und bleiben auf einer sicheren Höhe.
7. Ist ein geeignetes Landefeld erreicht, beenden Sie den Vorwärtsfl ug durch zentrieren des Pitchknüppels und verringern langsam das Gas bis der Quadcopter aufgesetzt hat. Stoppen Sie die Motoren mit dem roten Button und schalten danach den Copter aus.
Im Fall des Verlustes des Quadcopters: Schalten Sie die ST10Fernsterung nicht aus.Auch wenn der Copter aus der Videoreichweite gefl ogen ist wird die letzte bekannte GPS Koordinate in der linken unteren Ecke des Videodisplay angezeigt. Geben Sie zur Lokalisierung des Copters diese Koordinaten in eine Online Karte ein. Die weiteren Telemetriedaten werden ebenfalls im Display angezeigt.
ST-10 Senderdisplay
DistanzGPS Koordinaten Quadcopter
Kompasspfeil
Höhe
HINWEIS: Versuchen Sie niemals den Quadcopter ausserhalb der normalen Sichtweite zu fl iegen. Bei Nichtbeachtung dieser Vorsichtsmaßnahme kann es zu Orientierungsproblemen kommen und im Fall eines GPS Verlustes zum Absturz. Absturzschäden sind nicht durch die Garantie gedeckt.
Blade Chroma Ergänzung zur Bedienungsanleitung
Sollten Sie die DX4 oder einen anderen BNF Sender verwenden und das GPS Signal fällt während des Fluges aus.1. Keine Panik bekommen und nicht die Rückkehrfunktion (Return Home) aktivieren.2. Verringern Sie nicht das Gas. Reduziertes Gas bedeutet Höhenverlust und einen möglichen Absturz.3. Für die Rettung des Chromas gibt es zwei Möglichkeiten: Versuchen Sie den Chroma manuell zum Startpunkt zurück zu fl iegen oder landen ihn da
wo er sich gerade befi ndet. Sollte Sie den Quadcopter an der aktuellen Position landen fahren Sie mit Schritt 5 fort.
HINWEIS: Versuchen Sie den Quadcopter nur zu ihrer Postion zurück zu fl iegen wenn sie ausreichend mit der Kontrolle im AP Mode vertraut sind und dieser nah genug ist, so dass die Fluglage erkennen können.
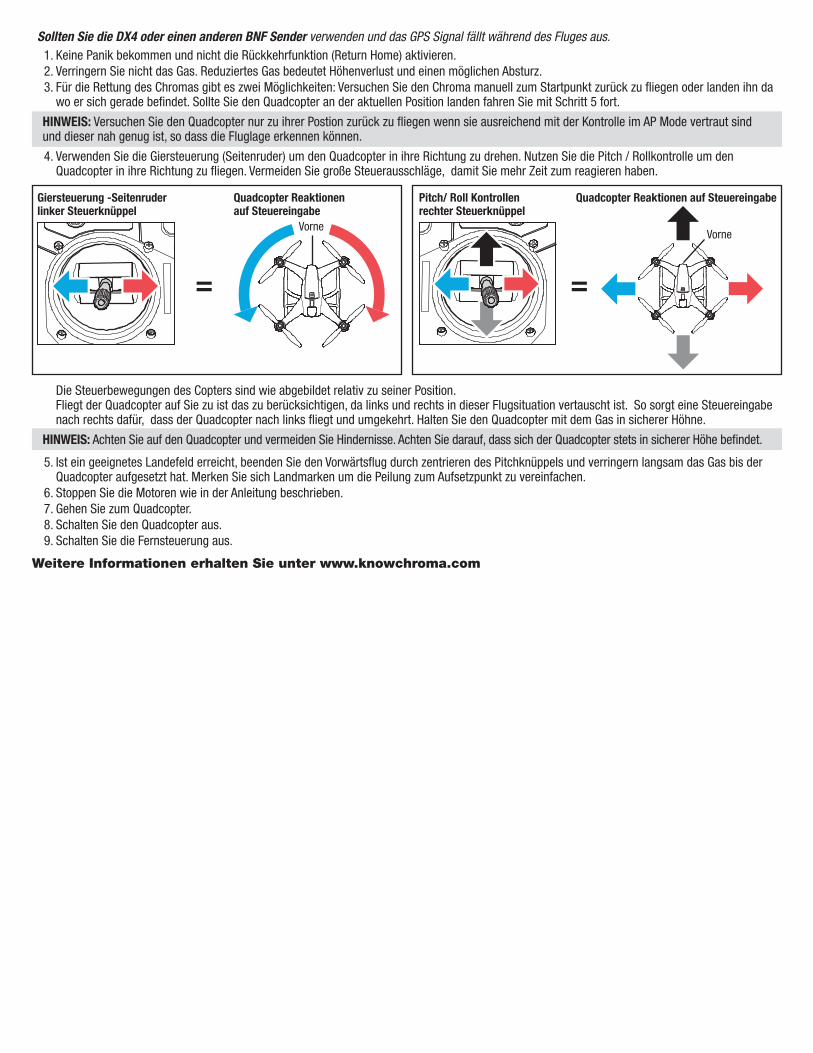
4. Verwenden Sie die Giersteuerung (Seitenruder) um den Quadcopter in ihre Richtung zu drehen. Nutzen Sie die Pitch / Rollkontrolle um den Quadcopter in ihre Richtung zu fl iegen. Vermeiden Sie große Steuerausschläge, damit Sie mehr Zeit zum reagieren haben.
Die Steuerbewegungen des Copters sind wie abgebildet relativ zu seiner Position. Fliegt der Quadcopter auf Sie zu ist das zu berücksichtigen, da links und rechts in dieser Flugsituation vertauscht ist. So sorgt eine Steuereingabe nach rechts dafür, dass der Quadcopter nach links fl iegt und umgekehrt. Halten Sie den Quadcopter mit dem Gas in sicherer Höhne.
HINWEIS: Achten Sie auf den Quadcopter und vermeiden Sie Hindernisse. Achten Sie darauf, dass sich der Quadcopter stets in sicherer Höhe befi ndet.
5. Ist ein geeignetes Landefeld erreicht, beenden Sie den Vorwärtsfl ug durch zentrieren des Pitchknüppels und verringern langsam das Gas bis der Quadcopter aufgesetzt hat. Merken Sie sich Landmarken um die Peilung zum Aufsetzpunkt zu vereinfachen.
6. Stoppen Sie die Motoren wie in der Anleitung beschrieben. 7. Gehen Sie zum Quadcopter.8. Schalten Sie den Quadcopter aus.9. Schalten Sie die Fernsteuerung aus.
Weitere Informationen erhalten Sie unter www.knowchroma.com
=
Vorne
Pitch/ Roll Kontrollenrechter Steuerknüppel
Quadcopter Reaktionen auf Steuereingabe
=
Vorne
Giersteuerung -Seitenruderlinker Steuerknüppel
Quadcopter Reaktionenauf Steuereingabe
FR
Addendum au manuel du quadcoptère Chroma avec caméra
Avant le premier vol:Lisez l’intégralité du manuel d’utilisation du Chroma. Familiarisez-vous avec les fonctions du quadcoptère, l’émetteur et la caméra CGO avant de voler. Vérifi ez les conditions météorologiques pour la zone de vol choisie, y compris la vitesse du vent à l’altitude de vol prévue. N’essayez pas de voler si le vent est supérieur à 24km/h. Retirez la caméra CGO et effectuez plusieurs vols pour vous familiariser avec les commandes de vol et les réactions de votre quadcoptère avant de réinstaller la caméra.
Avant chaque vol:Suivez scrupuleusement les instructions du manuel pour effectuer la calibration du compas.Vérifi ez les conditions météorologiques pour la zone de vol choisie, y compris la vitesse du vent à l’altitude de vol prévue. N’essayez pas de voler si le vent est supérieur à 24km/h.
Perte du signal GPSUne perte du verrouillage du signal GPS est connue comme “mode blanc” et entraine la désactivation de tous les autres modes de vol. La perte du signal GPS en vol est signalée par le clignotement de toutes les DELs du quadcoptère en blanc. La perte du signal, même si elle est rare, peut survenir pour divers raisons:
Interférence électromagnétique - Vol à proximité de lignes électriques (enterrées ou visibles), gros transformateurs électriques ou pendant une éruption solaire.Gros obstacles - Vol autour de grands bâtiments, arbres ou une couverture nuageuse dense.Vol par grand vent - Le GPS embarqué compense automatiquement le vent pour maintenir la position. Un grand vent peut menacer l’effi cacité du GPS, déplaçant ainsi le quadcoptère et le faisant passer en “Mode blanc”. Ne faites pas voler votre quadcoptère si la vitesse du vent est supérieure à 24km/h.
Si vous utilisez l’émetteur ST-10 et que vous perdez le signal GPS en vol:1. Ne paniquez pas et n’essayez pas d’utiliser la fonction Retour automatique (Return Home).2. Ne baissez pas les gaz. Baisser les gaz ferait perdre de l’altitude au quadcoptère et entraînerait peut-être le crash.3. Deux options sont possibles pour sauver le Chroma: essayer de faire revenir manuellement votre quadcoptère vers votre position ou le faire atterrir où il est
et aller le chercher. Si vous faites atterrir le quadcoptère où il est, passez à l’étape 7.4. Si le quadcoptère est loin de vous et que vous avez du mal à le voir, regardez l’écran de la ST-10 et cherchez la fl èche verte du compas. Vous pouvez vous
en servir comme guide pour rapprocher votre quadcoptère de vous jusqu’à ce que vous puissiez le piloter à vue.
5. Déplacez le manche de pas/roulis (manche droit de l’émetteur) dans la direction pointée par la fl èche pour rapprocher le quadcoptère de vous. Ajustez la vitesse du quadcoptère en augmentant ou réduisant le pas et roulis. Pour avoir plus de temps pour réagir, ne volez pas trop rapidement.
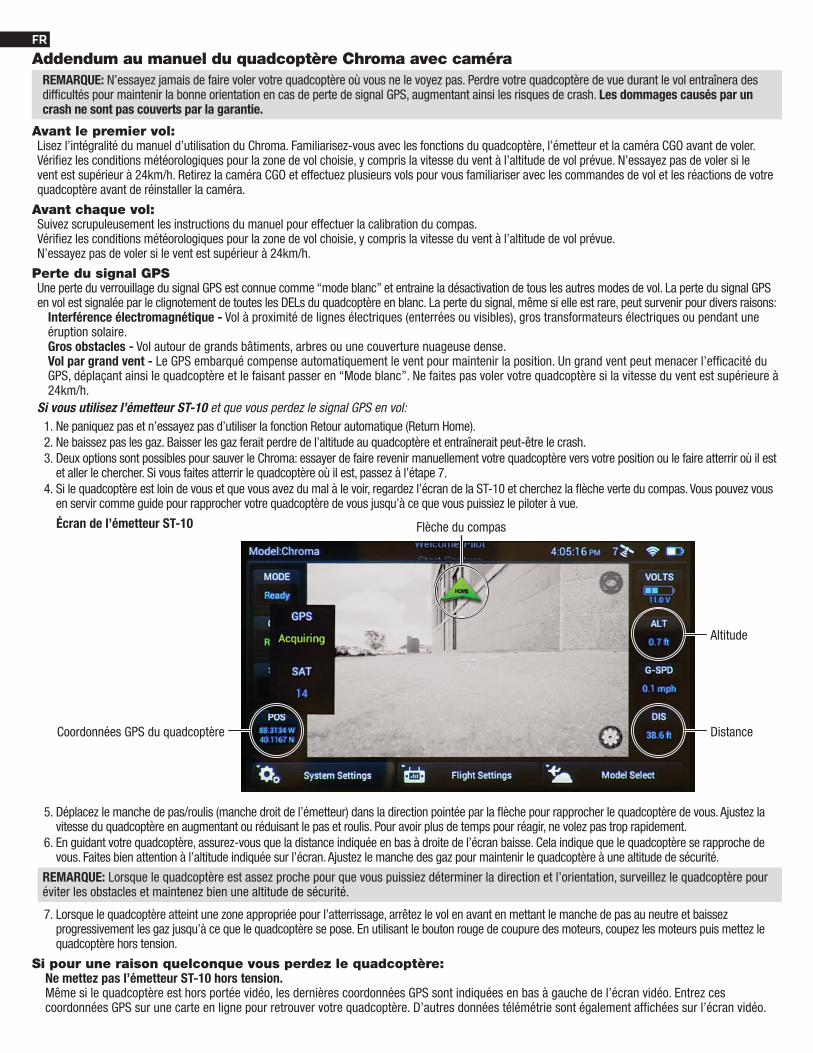
6. En guidant votre quadcoptère, assurez-vous que la distance indiquée en bas à droite de l’écran baisse. Cela indique que le quadcoptère se rapproche de vous. Faites bien attention à l’altitude indiquée sur l’écran. Ajustez le manche des gaz pour maintenir le quadcoptère à une altitude de sécurité.
REMARQUE: Lorsque le quadcoptère est assez proche pour que vous puissiez déterminer la direction et l’orientation, surveillez le quadcoptère pour éviter les obstacles et maintenez bien une altitude de sécurité.
7. Lorsque le quadcoptère atteint une zone appropriée pour l’atterrissage, arrêtez le vol en avant en mettant le manche de pas au neutre et baissez progressivement les gaz jusqu’à ce que le quadcoptère se pose. En utilisant le bouton rouge de coupure des moteurs, coupez les moteurs puis mettez le quadcoptère hors tension.
Si pour une raison quelconque vous perdez le quadcoptère:Ne mettez pas l’émetteur ST-10 hors tension.Même si le quadcoptère est hors portée vidéo, les dernières coordonnées GPS sont indiquées en bas à gauche de l’écran vidéo. Entrez ces coordonnées GPS sur une carte en ligne pour retrouver votre quadcoptère. D’autres données télémétrie sont également affi chées sur l’écran vidéo.
Écran de l’émetteur ST-10
DistanceCoordonnées GPS du quadcoptère
Flèche du compas
Altitude
REMARQUE: N’essayez jamais de faire voler votre quadcoptère où vous ne le voyez pas. Perdre votre quadcoptère de vue durant le vol entraînera des diffi cultés pour maintenir la bonne orientation en cas de perte de signal GPS, augmentant ainsi les risques de crash. Les dommages causés par un crash ne sont pas couverts par la garantie.
Si vous utilisez une DX4 ou un autre émetteur BNF et que vous perdez le signal GPS en vol:1. Ne paniquez pas et n’essayez pas d’utiliser la fonction Retour automatique (Return Home).2. Ne baissez pas les gaz. Baisser les gaz ferait perdre de l’altitude au quadcoptère et entraînerait peut-être le crash.3. Deux options sont possibles pour sauver le Chroma: essayer de faire revenir manuellement votre quadcoptère vers votre position ou le faire atterrir
où il est et aller le chercher. Si vous faites atterrir le quadcoptère où il est, passez à l’étape 5.
REMARQUE: Essayez de faire revenir le quadcoptère uniquement si vous maîtrisez le mode AP et que le quadcoptère est assez près pour déterminer visuellement la bonne orientation.
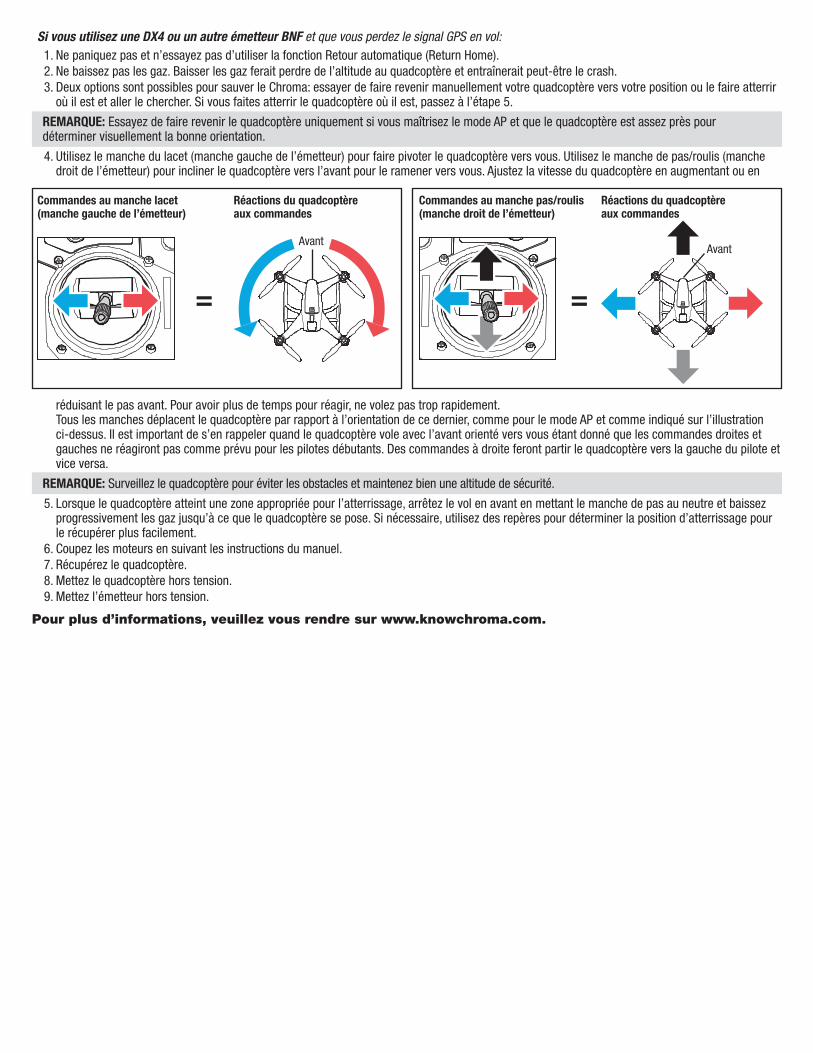
4. Utilisez le manche du lacet (manche gauche de l’émetteur) pour faire pivoter le quadcoptère vers vous. Utilisez le manche de pas/roulis (manche droit de l’émetteur) pour incliner le quadcoptère vers l’avant pour le ramener vers vous. Ajustez la vitesse du quadcoptère en augmentant ou en
réduisant le pas avant. Pour avoir plus de temps pour réagir, ne volez pas trop rapidement.Tous les manches déplacent le quadcoptère par rapport à l’orientation de ce dernier, comme pour le mode AP et comme indiqué sur l’illustration ci-dessus. Il est important de s’en rappeler quand le quadcoptère vole avec l’avant orienté vers vous étant donné que les commandes droites et gauches ne réagiront pas comme prévu pour les pilotes débutants. Des commandes à droite feront partir le quadcoptère vers la gauche du pilote et vice versa.
REMARQUE: Surveillez le quadcoptère pour éviter les obstacles et maintenez bien une altitude de sécurité.
5. Lorsque le quadcoptère atteint une zone appropriée pour l’atterrissage, arrêtez le vol en avant en mettant le manche de pas au neutre et baissez progressivement les gaz jusqu’à ce que le quadcoptère se pose. Si nécessaire, utilisez des repères pour déterminer la position d’atterrissage pour le récupérer plus facilement.
6. Coupez les moteurs en suivant les instructions du manuel.7. Récupérez le quadcoptère.8. Mettez le quadcoptère hors tension.9. Mettez l’émetteur hors tension.
Pour plus d’informations, veuillez vous rendre sur www.knowchroma.com.
=
Avant
Commandes au manche pas/roulis(manche droit de l’émetteur)
Réactions du quadcoptèreaux commandes
=
Avant
Commandes au manche lacet(manche gauche de l’émetteur)
Réactions du quadcoptèreaux commandes
IT
Prima del primo volo:Leggere l’intero manuale del Chroma. Familiarizzare con le funzioni del quadricoptero, della trasmittente e della videocamera CGO prima del primo volo. Controllare le condizioni meteorologiche nell’area di volo desiderata, considerando la velocità del vento e l’altitudine di volo desiderata. Non provare a volare con vento più forte di 24 km/h. Togliere la videocamera CGO e eseguire alcuni voli brevi a distanza moderata per familiarizzare con i controlli di volo e con le reazioni del quadricoptero prima di montare di nuovo la videocamera.
Prima di ogni volo:Seguire attentamente le istruzioni del manuale del Chroma per eseguire la calibrazione della bussola.Controllare le condizioni meteorologiche nell’area di volo desiderata, considerando la velocità del vento e l’altitudine di volo desiderata. Non provare a volare con vento più forte di 24 km/h.
Perdita del segnale GPS:La perdita del segnale GPS è conosciuta come la “modalità bianca”. Durante questa modalità tutte le altre modalità di volo sono inattive. Quando si verifi ca una perdita del segnale GPS durante il volo, i LED del quadricoptero si accenderanno bianco fi sso. Il quadricoptero deve essere recuperato manualmente quando si perde il segnale GPS durante il volo. La perdita del segnale, anche se rara, può occorrere per ragioni varie:
Interferenze elettromagnetiche – Volando vicino alle linee elettriche (aeree e interrate), grandi trasformatori elettrici o durante un’eruzione solare.Ostacoli grandi – Volando attorno ad edifi ci alti, alberi grandi e in nuvole dense.Vento forte – L’unità GPS integrata automaticamente compenserà il vento per mantenere la posizione. Il vento forte può travolgere l’unità, spingendo il quadricoptero fuori posizione e forzandolo in “modalità bianca”. Non provare a volare con vento più forte di 24 km/h.
Se state usando la trasmittente ST-10 e perdete il segnale GPS durante il volo:1. Non farsi prendere dal panico e non provare ad usare la funzione “Return Home”.2. Non abbassare lo stick del motore. Abbassando lo stick del motore, il quadricoptero perderà altitudine e probabilmente cadrà.3. Ci sono due opzioni per recuperare il Chroma: provare a volare il quadricoptero manualmente fi no alla vostra posizione per l’atterraggio o farlo atterrare
nella sua posizione e recuperarlo da lì. Se volete far atterrare il quadricoptero nella sua posizione, passare allo step 7.4. Se il quadricoptero si trova molto distante ed è diffi cile vederlo, guardare lo schermo della trasmittente ST-10 e cercare la freccia verde della bussola. Potete
usarla come guida per far avvicinare il quadricoptero alla vostra posizione fi no a quando avrete ripristinato il contatto visivo.
5. Muovere i comandi di pitch e rollio (stick destro della trasmittente) nella direzione in cui punta la freccia per avvicinare il quadricoptero con attenzione alla vostra posizione. Regolare la velocità del quadricoptero aumentando o diminuendo rollio e pitch. Per avere a disposizione più tempo per reagire, non provare a volare ad alta velocità.
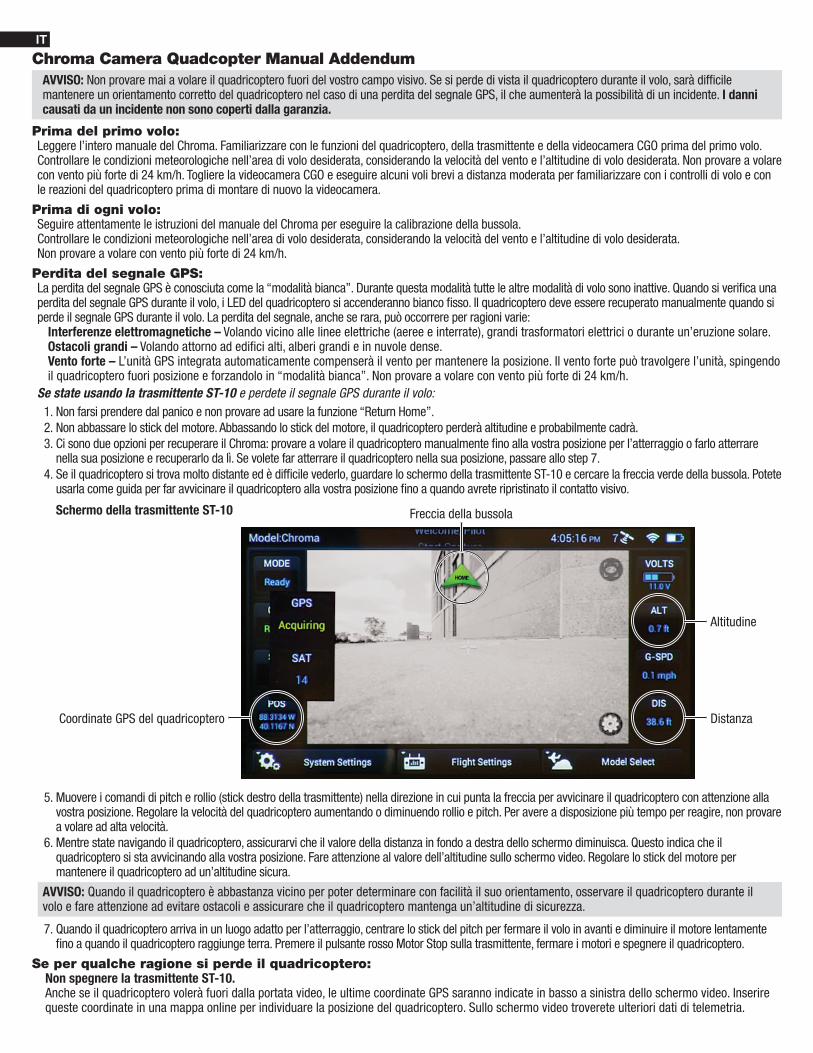
6. Mentre state navigando il quadricoptero, assicurarvi che il valore della distanza in fondo a destra dello schermo diminuisca. Questo indica che il quadricoptero si sta avvicinando alla vostra posizione. Fare attenzione al valore dell’altitudine sullo schermo video. Regolare lo stick del motore per mantenere il quadricoptero ad un’altitudine sicura.
AVVISO: Quando il quadricoptero è abbastanza vicino per poter determinare con facilità il suo orientamento, osservare il quadricoptero durante il volo e fare attenzione ad evitare ostacoli e assicurare che il quadricoptero mantenga un’altitudine di sicurezza.
7. Quando il quadricoptero arriva in un luogo adatto per l’atterraggio, centrare lo stick del pitch per fermare il volo in avanti e diminuire il motore lentamente fi no a quando il quadricoptero raggiunge terra. Premere il pulsante rosso Motor Stop sulla trasmittente, fermare i motori e spegnere il quadricoptero.
Se per qualche ragione si perde il quadricoptero:Non spegnere la trasmittente ST-10.Anche se il quadricoptero volerà fuori dalla portata video, le ultime coordinate GPS saranno indicate in basso a sinistra dello schermo video. Inserire queste coordinate in una mappa online per individuare la posizione del quadricoptero. Sullo schermo video troverete ulteriori dati di telemetria.
Schermo della trasmittente ST-10
DistanzaCoordinate GPS del quadricoptero
Freccia della bussola
Altitudine
AVVISO: Non provare mai a volare il quadricoptero fuori del vostro campo visivo. Se si perde di vista il quadricoptero durante il volo, sarà diffi cile mantenere un orientamento corretto del quadricoptero nel caso di una perdita del segnale GPS, il che aumenterà la possibilità di un incidente. I danni causati da un incidente non sono coperti dalla garanzia.
Chroma Camera Quadcopter Manual Addendum
©2016 Horizon Hobby, LLC.Blade, Chroma and the Horizon Hobby logo are trademarks or registered trademarks of Horizon Hobby, LLC. The Spektrum trademark is used with permission of Bachmann Industries, Inc. All other trademarks, service marks or logos are property of their respective owners. Patents pending.Created 2/16 BLH8660, BLH8665, BLH8670, BLH8675, BLH8680, BLH8690, BLH8691 52812
Se state usando la trasmittente DX4 o un altra trasmittente BNF e perdete il segnale GPS durante il volo:1. Non entrare in panico e non provare ad usare la funzione “Return Home”.2. Non abbassare lo stick del motore. Abbassando lo stick del motore, il quadricoptero perderà di altitudine e probabilmente cadrà.3. Ci sono due opzioni per recuperare il Chroma: provare a volare il quadricoptero manualmente fi no alla vostra posizione per l’atterraggio o farlo
atterrare nella sua posizione e recuperarlo da lì. Se volete far atterrare il quadricoptero nella sua posizione, passare allo step 5.
AVVISO: Provare solamente a volare il quadricoptero fi no alla vostra posizione se vi sentite in grado di controllarlo manualmente nella modalità AP e se il quadricoptero si trova abbastanza vicino per visualmente determinare il suo orientamento.
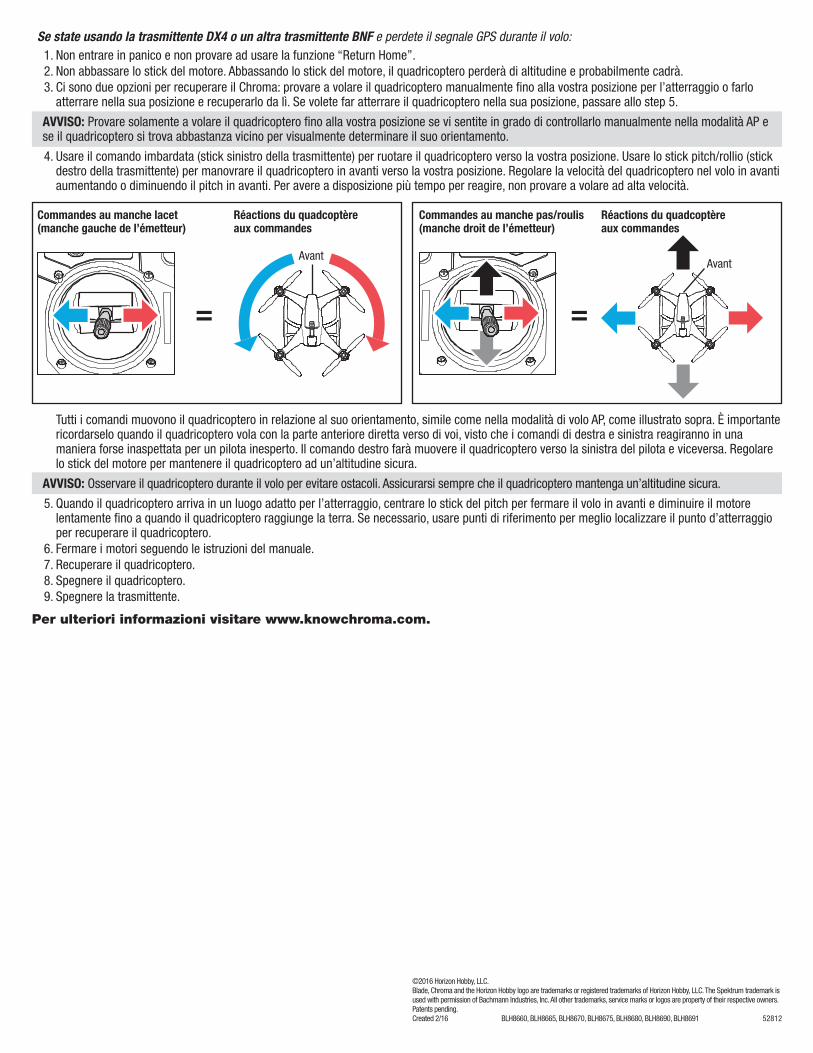
4. Usare il comando imbardata (stick sinistro della trasmittente) per ruotare il quadricoptero verso la vostra posizione. Usare lo stick pitch/rollio (stick destro della trasmittente) per manovrare il quadricoptero in avanti verso la vostra posizione. Regolare la velocità del quadricoptero nel volo in avanti aumentando o diminuendo il pitch in avanti. Per avere a disposizione più tempo per reagire, non provare a volare ad alta velocità.
Tutti i comandi muovono il quadricoptero in relazione al suo orientamento, simile come nella modalità di volo AP, come illustrato sopra. È importante ricordarselo quando il quadricoptero vola con la parte anteriore diretta verso di voi, visto che i comandi di destra e sinistra reagiranno in una maniera forse inaspettata per un pilota inesperto. Il comando destro farà muovere il quadricoptero verso la sinistra del pilota e viceversa. Regolare lo stick del motore per mantenere il quadricoptero ad un’altitudine sicura.
AVVISO: Osservare il quadricoptero durante il volo per evitare ostacoli. Assicurarsi sempre che il quadricoptero mantenga un’altitudine sicura.
5. Quando il quadricoptero arriva in un luogo adatto per l’atterraggio, centrare lo stick del pitch per fermare il volo in avanti e diminuire il motore lentamente fi no a quando il quadricoptero raggiunge la terra. Se necessario, usare punti di riferimento per meglio localizzare il punto d’atterraggio per recuperare il quadricoptero.
6. Fermare i motori seguendo le istruzioni del manuale.7. Recuperare il quadricoptero.8. Spegnere il quadricoptero.9. Spegnere la trasmittente.
Per ulteriori informazioni visitare www.knowchroma.com.
=
Avant
Commandes au manche pas/roulis(manche droit de l’émetteur)
Réactions du quadcoptèreaux commandes
=
Avant
Commandes au manche lacet(manche gauche de l’émetteur)
Réactions du quadcoptèreaux commandes