-
- 544 -
Solutions to Chapter 14 Exercise Problems
Problem 14.1
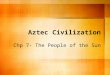
The four-wheeled vehicle shown slides down a steep slope with
its rear wheels locked (notmoving relative to the body) and its
front wheels rolling freely. If M is the mass of the vehicle, hthe
normal distance from its center of mass, G, to the ground, r the
wheel radius, and 2c thedistance between the axles, find the
acceleration of the vehicle. The angle of the slope is , andthe
coefficient of friction between the wheels and the ground is The
mass and moment ofinertia of each wheel about its axle may be
neglected. What is the largest value for the angle atwhich the
vehicle will not slide?
c
c
r
r
h
G
a
Front
Solution
A freebody diagram of the vehicle is shown in Fig. 14.1.1a. For
the analysis, we will write theequations of dynamics relative to an
n-t coordinate system with t parallel to and and n normal tothe
direction of motion as shown in Fig. 14.1.1b.
Summing forces in the n and t directions and summing moments
about point G gives
Fn =man = 0 = N1 + N2 mgcos (1)Ft =mat = N1 +mgsin (2)MG = I = 0
= N2(c) N1(c)N1(h) (3)
From Eq. (3),
N2 = N11+hc[ ] (4)
Combining Eqs. (1) and (4) gives
-
- 545 -
c
c
r
r
h
G
mg N1N1
N2
c
c
r
r
h
G
mg
N1N1
N2
mg sin
mg cos
n
t
(a)
(b)
Fig. 14.1.1: Freebody diagram for Problem 14.1
N1 + N1 1+hc[ ] mgcos = 0 N1 =
mgcos2 +
hc
(5)
From Eqs. (4) and (5),
N2 = N11+hc[ ]=
mgcos2 +
hc
1+hc[ ]= mgcos
c+ h2c+ h
Combining Eqs. (2), (4), and (5),
mat = N1 +mgsin = mgcos2 +
hc
+mgsin
or
at = g sin ccos2c+ h
If at = 0 (no sliding),
-
- 546 -
tan = c2c+ h
and
= tan1 c2c +h
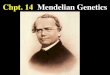
Problem 14.2
The flyball governor shown is started from rest and accelerated
slowly about the axis of rotation.At what speed of rotation will it
be in the position shown? Friction may be neglected. Ignore
themasses of the four links.
AB = GH = 2.50 inEG = FH = 3.76 inCG = DH = 5.54 inAE = BF =
3.76 in
1 lb weight
10 lb weight
1 lb weight
Axis of Rotation Attached to the
Frame
A B
C D
E F
G H
2
34
5 6
7
45
Solution:
Because the mechanism is symmetric, we need only consider one
half of it. The inertia force oneach weight will be
fI =mar = Wgr2 = W2
gHDsin45 +AB / 2[ ] = (1)
2
3865.54sin45 +2.5 / 2[ ] = 0.013392 (1)
The problem is to determine the angular velocity. Therefore, we
will treat the inertia force as anunknown force. Once we determine
the magnitude of fI, we can determine the value for theangular
velocity from Eq. (1).
A freebody diagram of links 2, 3, and 6 are shown in Fig.
14.2.1. To analyze the system, startwith link 2 and sum forces in
the vertical direction . Before doing this, however, note that
F32 = F42
Then, summing forces in the vertical direction for link 2
gives
-
- 547 -
Fy = 0 = 10+ 2F32 cos45 F32 = 102cos45 = 7.071 lbBecause link 3
is a two-force member,
F36 = F32
1 lb weight
10 lb weight
1 lb weight
Axis of Rotation Attached to the
Frame
A B
C D
E F
G H
2
34
5 6
7
45
10 lb
A B
2
F3245 45F42
B
F
3
F63
F23
1 lb
D
F
H
645
f IF36
F76
F76x
y
Fig. 14.2.1: Freebody diagrams for Problem 14.2.
as indicated in Fig. 14.2.1. The freebody diagram for link 6 now
has only three unknowns.Therefore, we can solve for the unknowns.
To find the inertia force, we can sum moments aboutpoint H without
solving for F76 . Then,
MH = 0 = F36(FH) + fI (HDcos45 ) 1(HDsin45)or
-
- 548 -
7.071(3.76)+ fI(5.54cos45 ) 1(5.54sin 45 ) = 0or
fI =(5.54sin45 )+ 7.071(3.76)
(5.54cos45 )= 7.787 lb
Therefore, from Eq. (1),
0.013392 = 7.787
Then,
2 = 7.7870.01339
= 581.5
and = 24.1 rad / s
Problem 14.3
Solve Problem 14.2 assuming a coefficient of friction of 0.3 at
each of the six pin joints. Thediameter of each joint is 0.8
in.
Solution:
The inertia force on each weight will be
fI =mar = Wgr2 = W2
gHDsin45 +AB / 2[ ] = (1)
2
3865.54sin45 +2.5 / 2[ ] = 0.013392 (1)
The problem can be approached either graphically or
analytically. However, because a nonlinearproblem is involved, it
is easiest to solve the problems graphically using friction circles
(Chapter11). To determine the general direction of the force
vectors, we need to conduct a friction freeanalysis first. Freebody
diagrams of the links are shown in Fig. 14.3.1. Note that we are
usingthe fact that the mechanism is symmetric so that we need
analyze only half of the mechanism.Also, we will use skeletal
diagram for the links to simplify the drawings.
To start the analysis, sum forces on link 2. Then,
F = 0 = F32 + F42 10jThe force polygon is shown in Fig. 14.3.2.
From the polygon,
F32 = 7.07 lb .
The freebody diagram for link 6 has three unknowns. To solve the
problem graphically, we needto resolve the weight of the counter
weight and F36 into a single vector. The resultant we willcall P.
Next, resolve P and fI into a single vector. We cannot find the
magnitude yet, but weknow that the resultant must go through the
point of intersection of the two vectors. After this isdone, there
will be only two forces acting on link 6. Therefore, the line of
action of F76 mustpass through the intersection of P and fI.
Knowing the direction of F76, we can complete theanalysis by
summing forces on link 6. That is,
-
- 549 -
F = 0 = F76 + F36 1j + fIFrom the polygon,
fI = 7.60 lb .
Force Scale
10 lb
10 lb
2
F
B
3
fI
1 lb
H
D
Position Scale2 in
6
10 lb
B2
F42 F32
F
B
3
F23
F63
F
fI
1 lb
H
D
6
F76
Fig. 14.3.1: Freebody diagrams for Problem 14.3.
Next consider the friction case. We now know the general
direction of the forces, and from akinematic analysis, we can
determine the direction of the friction torques. These tend to
opposethe relative motion. The general directions of the relative
angular velocities and friction torquesare shown in Fig.
14.3.3.
-
- 550 -
To use the friction circle approach, we need to compute the
radius of the friction circles. This isgiven by Eq. (11.15) as
Rf = Rsinwhere
= tan1 = tan10.3 =16.7
Then,
Rf = Rsin = 0.4sin(16.7) = 0.115 in .
The friction circles are also shown in Fig. 14.3.3. The forces
are located relative to the frictioncircles so that the effect of
the force is to create the friction torque on the free body of the
link.The forces are located on the proper sides of the circle in
Fig. 14.3.3.
The freebody diagrams with the forces located properly are shown
in Fig. 14.3.4. We can thenfollow the same general procedure as was
used in the nonfriction case. That is, start summingforces on link
2. Then,
F = 0 = F32 + F42 10jThe force polygon is shown in Fig. 14.3.4.
From the polygon,
10 lb
B2
F42 F32
F42
10 lb
F32
F36
F
fI
1 lb
H
D
6
F76
P
F36
1 lb
fI
PF76
Fig. 14.3.2: Force polygons for friction-free case.
F32 = 7.53 lb .
The freebody diagram for link 6 has three unknowns. To solve the
problem graphically, we needto resolve the weight of the counter
weight and F36 into a single vector. The resultant we will
-
- 551 -
call P. Next, resolve P and fI into a single vector. We cannot
find the magnitude yet, but weknow that the resultant must go
through the point of intersection of the two vectors. After this
isdone, there will be only two forces acting on link 6. Therefore,
the line of action of F76 mustpass through the intersection of P
and fI. Knowing the direction of F76, we can complete theanalysis
by summing forces on link 6. That is,
Force Scale
10 lb
10 lb 2
F
B
3
fI
1 lb
H
D
Position Scale2 in
6
10 lb
B2
F42 F32
F
B
3
F23
F63
Increasing
decreasing
Increasing
F
fI
1 lb
H
D
6
F76
F36
Fig. 14.3.3: Freebody diagrmas for friction case.
F = 0 = F76 + F36 1j + fIFrom the polygon,
-
- 552 -
fI =8.69 lb .
Therefore, from Eq. (1),
0.013392 = 8.69
Then,
2 = 8.690.01339
= 649
and = 25.5 rad / s
F42
10 lb
F32
F76
P
F36
1 lb
fI
P F76
10 lb
B2
F42 F32
F
f I
1 lb
H
D
6
F36
Fig. 14.3.4: Force polygons for friction case.
Problem 14.4
A wheel, of mass m and radius r, rolls without slipping on a
horizontal plane. It hits a step ofheight h. If the velocity of the
center of the wheel before striking the step is V, directed
asshown, find:
1. The magnitude and direction of the velocity of the center of
the wheel immediately after theimpact
2. The minimum value of V for which the wheel surmounts the
step
3. The impulse exerted on the wheel by the edge of the step at
impact
-
- 553 -
The impact may be considered to take place over a vanishingly
small time interval. The wheel isassumed to remain in contact with
the edge of the step after the impact. The wheel may beconsidered
to have moment of inertia about its center in the direction of
rotation I = mr2.
h
rV
Solution
Part 1
Before impact, the angular momentum about the top edge of the
step is
H1 =mV(r h) + IVr
for the wheel,
I =mr2
Therefore,
r
u
h
Fig. 14.4.1: Wheel immediately after impact with the step
H1 =mV(r h) + I = mV(r h) + IVr=mV(r h)+ V
rmr2
= mV r h + r[ ] =mV 2r h[ ](1)
Immediately after impact, the wheel will rotate about the corner
of the step. Let the velocity be uas shown in Fig. 14.4.1. Then,
the angular momentum about the edge of the step is
H2 =mru + Iur= mur + u
rmr2 = 2mur (2)
By conservation of angular momentum,
-
- 554 -
H1 =H2 2mur =mV 2r h[ ]Then,
u =V 2r h[ ] / (2r)
The direction is given by
= cos1 r hr( )
Part 2
The cylinder will just reach the top of the step, when all of
the initial kinetic energy is convertedto potential energy. The
kinetic energy just after impact (energy is not conserved during
impact)is
KE = 12mu2 + I 2[ ] = 1
2 mu2 + I u
r( )2
[ ] = 12 mu2 +mr2 ur( )2
[ ]= mu2 = mV2 2r h[ ]2 / (4r2)and the potential energy is zero.
After just reaching the top of the step, the potential energy ismgh
and the kinetic energy is zero. Therefore,
mgh =mV2 2r h[ ]2 / (4r2)
or the initial velocity required to just reach the top of the
step is
V = gh 2r2r h
Part 3:
To determine the impulse exerted on the wheel, we must determine
the change in momentumbefore and after the impact. Before the
impact
q1 =mVi
After impact (see Fig. 14.4.1),
q2 =mu cosi + sinj( )
From Fig. 14.4.2,
-
- 555 -
r
u
r - h
r2 r h( )2
h
Fig. 14.4.2: Geometry at step
cos = r hr
and
sin = r2 r h( )2
r= 2rh h2
r
Therefore,
q2 =mu r hr i +2rh h2r
j( ) =mV 2r h[ ]2rr hri+ 2rh h2
rj( )
The impulse is
im = q2 q1 =mV 2r h[ ]2r
r hri + 2rh h2
rj( ) mVi
= mV2r2
(r h)(2r h) 2r2{ }i+ (2r h) 2rh h2 j( )
= mV2r2
h(h 3r)i + h(2r h)(3/2) j( )
Problem 14.5
In the mechanism shown below, link 2 rotates at an angular
velocity of 20 rad/s (CW) andangular acceleration of 140 rad/s2
(CW). Find the torque that must be applied to link 2 tomaintain
equilibrium. Link 2 is balanced so that its center of mass is at
the pivot O2. The centerof mass of link 3 is at A, and the
mechanism moves in the horizontal plane. Friction may
beneglected.
O2A = CA = 100 mm, m3= 0.74 kg, m4= 0.32 kg
IG2= .00205 N-s2-m, IG3=.0062 N-s2-m
-
- 556 -
A
B
4
32 G3 C G4,O 2 G 2,
15T12
Solution:
Velocity Analysis:
1vA2 = 1vA2 /O2 = 1vA3 = 12 rA2/O2
1vC3 =1vC4 =1vA3 + 1vC3 /A3 (1)
Now,
1vA3 = 12 rA2/O2 = 20 100 = 2000mm / s ( to rA2 /O2 )
1vC3 in horizontal direction
1vC3 /A3 =1 3 rC3/A3 1vC3 /A3 = 13 rC3 /A3 ( to rC3 /A3)
Solve Eq. (1) graphically with a velocity polygon. From the
polygon,
1vC3 =1035.3mm / s
Also,
1vC3 /A3 = 2000mm / sor
13 =1vC3/A3rC3/A3
= 2000100
= 20 rad / s CCW
Acceleration Analysis:
1aC3 =1aC4 =1aA3 +1aC3/A3
1aC3 =1 aA2 /O2r +1 aA2 /O2
t +1 aC3/ A3r +1 aC3 /A3
t (2)
-
- 557 -
A
C2
4
3
D
o
1000 mm/s
Velocity Polygon
a2 a3,
c3, c41vC 3
1vA 3 1vC3 /A3
o'
20,000 mm/sAcceleration Polygon
2
a 2'a 3',
1aA2 / O 2r
1aA2/O2t
1aC3
c 3'
1aC3 / A 3r
1aC3 / A 3t
G4
G3
g3',
g4',
Fig. 14.5.1: Position, velocity, and acceleration polygon for
Problem 14.5
Now,
1aC3 in horizontal direction
1aA2 /O2r =12 12 rA2/O2( ) 1a A2/O2r = 12
2 rA /O2 = 202 100 = 40,000 mm / s2
in the direction opposite to rA/O2
1aA2 /O2t =12 rA2/O2 1aA2 /O2t = 12 rA/O2 = 140 100 =14,000mm /
s2 ( to rA/O2)
1aC3/A3r =13 13 rC3/ A3( ) 1a C3/ A3r = 13
2 rC3/A3 = 202 100 = 40,000mm / s2
in the direction opposite to rC3/A3
1aC3/ A3t =13 rC3 /A3 1aC3/ A3t = 13 rC3/A3 ( to rC3/A3)
Solve Eq. (2) graphically with a acceleration polygon. From the
polygon,
1aC3 =1aG4 = 70,028mm / s2and
1aA3 = 1aG3 = 42,400 mm / s2
Also,
-
- 558 -
13 =1aC3/A3t
rC3/A3= 14000100
=140 rad / s2 CCW
Inertia Force Analysis:
We can now conduct the inertia force analysis. There will be an
inertia force associated witheach center of gravity. We will
represent these forces with a lower case f to distinguish
betweeninternal inertia forces and externally applied forces. The
forces are
f12 = m21aG2 = 0f13 = m3 1aG3 = 0.74(42,400) = 31,380 kg mm / s2
=31.380 kg m / s2 = 31.380 N(opposite1aG3 )f14 = m41aG4 =
0.32(70,028) = 22,409 kg mm / s2 = 22.409 kg m / s2 = 22.409
N(opposite 1aG4 )
Links 2 and 3 have angular accelerations so only these links
have inertia moments. The inertiamoments are given by
M12 = I2 12 = 0.00205(140) = 0.287N m (opposite 12 or CCW)M13 =
I313 = 0.0062(140) = 0.868N m (opposite 13 or CW)
The inertia forces are shown in Fig. 14.5.2. The orientation
angles for the forces and links areshown in Fig. 14.5.2.
A freebody diagram for each of the links is shown in Fig.
14.5.2. From the free body diagrams,it is clear that no single free
body can be analyzed separately because in each case, fourunknowns
result. Therefore, we must write the equilibrium equations for each
freebody andsolve the equations as a set.
For the freebody diagram for link 4, assume initially that all
of the unknown forces are in thepositive x and y directions. Then a
negative result will indicate that the forces are in the
negativedirection. Note that F14x = 0 because there is no friction
between the slider and the frame.Summing forces in the X and Y
directions gives
Fx = 0F34x + f14 = 0 F34x = 22.409NFy = 0 F14y + F34y = 0
(3)
Between links 3 and 4,
F43x = F34xF43y = F34
y (4)
Now move to the free body diagram for link 3. Summing forces in
the X and Y directions gives:
Fx = 0F23x + F43x + f13cos34.30 = 0 = F23x + F43x +31.38cos34.30
F23x + F43x = 25.92 NFy = 0 F23y + F43y + f13sin34.30 = 0 = F23y +
F43y + 31.38sin34.30 F23y + F43y = 17.64 N
(5)
and summing moments about point A gives
-
- 559 -
3
Force Scale
13
C
4
G4f1415
2M12
T12
15
A
20 N
G3
M13
f
34.3
C 4 f14
F34x
F34y
14F
2
M12
T12 F12x
F12y
A
G3 F32x
F32y
A
3G3
M13
C
1534.3
F23
f13x
F23y
x
F43y
F43
O2
O2
Fig. 14.5.2: Force diagrams for Problem 14.5
MA = 0M13 + F43x (ACsin15) + F43y (AC cos15) = 0= 0.868(1000)+
F43x(100sin15) + F43y (100cos15) F43x (25.88) + F43y (96.59) =
868
(6)
Now using Eqs. (4),
F23x F34x = 25.85F23y F34y = 17.65F34x (25.88) F34y (96.59) =
868
(7)
Between links 2 and 3,
F32x = F23xF32y = F23
y (8)
For link 2, the equilibrium equations are
Fx = 0F32x + F12x = 0Fy = 0 F32y + F12y = 0 (9)
-
- 560 -
and summing moments about point O2 gives
MO2 = 0F32x (ADsin15) + F32y (ADcos15) +T12 + M12 = 0= F32x
(100sin15) + F32y (100cos15)+ T12 + 0.287(1000) = 0F32x (25.88) +
F32y (96.59) + T12 = 287
(10)
Now using Eqs. (8),
Fx = 0F23x + F12x = 0Fy = 0 F23y + F12y = 0MO2 = 0 F23x (25.88)
F23y(96.59) + T12 = 287
(11)
Equations (3), (7), and (11) can be written in matrix form for
solution. This gives,
0 1 0 0 0 0 0 01 0 1 0 0 0 0 00 1 0 1 0 0 0 00 0 1 0 1 0 0 00
25.88 96.59 0 0 0 0 00 0 0 1 0 1 0 00 0 0 0 1 0 1 00 0 0 25.88
96.59 0 0 1
F14y
F34x
F34y
F23x
F23y
F12x
F12y
T12
=
22.4090
25.8517.6586800287
(12)
Equation (12) can be easily solved using MATLAB. The results
are
F14x = 0 NF14y = 2.98 N
F34x = F43x = 22.41NF34y = F43y = 2.98 N
F23x = F32x = 48.26NF23y = F32y = 20.63 N
F12x = 48.26 NF12y = 20.63N
T12 = 1030.9 N mm
-
- 561 -
Problem 14.6
Find the external torque (T12) that must be applied to link 2 of
the mechanism illustrated to driveit at 2=1,800 rad/s CCW and 2=0
rad/s2. Link 2 is in a horizontal position. and it is balancedso
that its center of mass is at the pivot O2. The mechanism moves in
the horizontal plane, andfriction may be neglected.
W3=0.708 lb IG3 = 0.0154 lb-s2-in
W4=0.780 lb IG4 = 0.0112 lb-s2-in
G3G4
22
3
4
AO2 = 3.0 inO O2 = 7.0 in
AG = 4.0 inBO4 = 6.0 in
AB = 8.0 in
4
BG4 = 3.0 in
3
O4
G2
O2A
B
T12
Solution:
Velocity Analysis:
1vA2 = 1vA2 /O2 = 1vA3 = 12 rA2/O2
1vB3 = 1vB4 = 1vA3 +1vB3/ A3 =1vO4 +1vB4/O4 = 1vB4 /O4 (1)
Now,
1vA3 = 12 rA2/O2 =1800 3 = 5400 in / s
1vB4 /O4 = 14 rB4 /O4 1vB4/O4 = 14 rB4 /O4 ( to rB4/O4)
1vB3 /A3 = 13 rB3/A3 1vB3/A3 = 13 rB3/ A3 ( to rB3/ A3)
Solve Eq. (1) graphically with a velocity polygon. From the
polygon,
1vB3 /A3 = 4283.4 in / sand
1vB4 /O4 = 3195.6 in / s
Then,
-
- 562 -
13 =1vB3/ A3rB3/A3
= 4283.48
= 535.4 rad / s CCW
and
14 =1vB4/O4rB4/O4
= 3195.66
= 532.6 rad / s CCW
Acceleration Analysis:
1aB3 =1aB4 = 1aA3 + 1aB3/ A3 =1aO4 + 1aB4/O4 = 1aB4 /O4
1aB3 =1aA2/O2r + 1aA2 /O2
t + 1aB3/ A3r + 1aB3 /A3
t = 1aB4 /O4r + 1aB4 /O4
t (2)Now,
1aA2 /O2r =12 12 rA2/O2( ) 1a A2/O2r = 12
2 rA/O2 =18002 3 = 9,720,000 in / s 2
in the direction opposite to rA/O2
1aA2 /O2t =12 rA2/O2 = 0
1aB3 /A3r = 13 13 rB3 /A3( ) 1a B3/ A3r = 13
2 rB3 /A3 = 535.42 8 = 2,293,000 in / s 2
in the direction opposite to rB3/ A3
1aB3/A3t =13 rB3 /A3 1aB3/A3t = 13 rB3 /A3 ( to rB3/ A3)
1aB4 /O4r =14 14 rB4 /O4( ) 1a B4 /O4r = 14
2 rB4/O4 = 532.62 6 =1,702,000 in / s 2
in the direction opposite to rB4 /O4
1aB4 /O4t =14 rB4/O4 1aB4 /O4t = 14 rB4 /O4 ( to rB4 /O4)
Solve Eq. (2) graphically with a acceleration polygon. From the
polygon,
1aG3 = 7,700,000 in / s 2
1aG4 = 2,867,000 in / s 2
1aB3 /A3t = 4,151,000 in / s 2
1aB4 /O4t = 5,533,000 in / s 2
Also,
13 =1aB3/A3t
rB3/ A3=4,151,000
8= 518,900 rad / s2 CCW
-
- 563 -
G3G4
22
3
4
AO2 = 3.0 inO O2 = 7.0 in
AG = 4.0 inBO4 = 6.0 in
AB = 8.0 in
4
BG4 = 3.0 in
3
O4
G2
O2A
B
T12
3000 in/s
Velocity Polygon
a2 a3,
b3, b4
1vB3
1v A3
1vB3/A 3
o
5,000,000 in/sAcceleration Polygon
2
a'2 a'3,1aA2/O2
r
1aB 3/A 3t
o'
b'
2 b'
3,
B3 /A3ra1
g'4
1aB4 /O4t
1aB4 /O4r
g'3
Fig. 14.6.1: Position, velocity, and acceleration polygon for
Problem 14.6.and
14 =1aB4/O4t
rB4 /O4=5,533,000
6= 922,200 rad / s2 CW
Inertia Force Analysis:
We can now conduct the inertia force analysis. There will be an
inertia force associated witheach center of gravity. We will
represent these forces with a lower case f to distinguish
betweeninternal inertia forces and externally applied forces. The
forces are
f12 = m21aG2 = 0f13 = m3 1aG3 = 0.708386 (7,700,000) =14,100 lb
(opposite
1aG3 )
f14 = m41aG4 = 0.780386 (2,867,000) = 5,800 lb (opposite1aG4
)
-
- 564 -
Links 3 and 4 have angular accelerations so these links have
inertia moments. The inertiamoments are given by
M13 = I313 = 0.0154(518,900) = 7,990 in lb (opposite 13 or
CW)M14 = I4 14 = 0.0112(922,200) = 10,300 in lb (opposite 14 or
CCW)
The inertia forces are shown in Fig. 14.6.2. The orientation
angles for the forces and links areshown in Fig. 14.6.2.
A freebody diagram for each of the links is shown in Fig.
14.6.2. From the free body diagrams,it is clear that no single free
body can be analyzed separately. Therefore, we must write
theequilibrium equations for each freebody and solve the equations
as a set.
For the freebody diagram for link 4, assume initially that all
of the unknown forces are in thepositive x and y directions. Then a
negative result will indicate that the forces are in the
negativedirection. Summing forces in the X and Y directions
gives
Fx = 0F14x + F34x f14cos20.19 = 0F14x + F34x = 5800cos20.19 =
5,440 lbFy = 0 F14y + F34y f14 sin20.19 = 0 F14y + F34y =
5800sin20.19 = 2,000 lb (3)
MO4 = 0M14 F34x (BO4sin52.55 ) F34y (BO4 cos52.55 )+ f14
cos20.19 (G4O4sin52.55 ) + f14sin20.19 (G4O4cos52.55 ) = 0
10,300 F34x (6sin52.55 ) F34y (6cos52.55 )+ 5800cos20.19
(3sin52.55 ) + 5800sin20.19 (3cos52.55 ) = 0
F34x (4.763) F43y(3.648) = 26,920
Between links 3 and 4,
F43x = F34xF43y = F34
y (4)
Now move to the free body diagram for link 3. Summing forces in
the X and Y directions gives:
Fx = 0F23x + F43x f13cos7.25 = 0 = F23x + F43x 14,100cos7.25
F23x + F43x = 13,990 lbFy = 0 F23y + F43y f13sin7.25 = 0 = F23y +
F43y 14,100sin7.25 F23y + F43y =1,780 lb (5)
and summing moments about point A gives
MA = 0M13 F43x (ABsin36.39) + F43y (ABcos36.39)+ f13cos7.25
(AG3sin36.39 ) f13sin7.25 (AG3cos36.39 ) = 0= 7,990 F43x (8sin36.39
) + F43y (8cos36.39 )+14,100cos7.25 (4sin36.39 ) 14,100sin7.25
(4cos36.39 ) = 0 F43x (4.74) + F43y (6.44) = 19,470
(6)
Now using Eqs. (4),
-
- 565 -
G3
G4
2
34
O4
G2
O2A
B
T 12
5000 lbForce Scale
M13
f1 3 M14f1 4
G4
4
O4
B
M14f1 4
F34x
F34y
F14x
F14y
T
2 G2 O2A
12
F12x
F12y
F32x
F32y
G3
3
A
B
M13
f1 3
F23x
F23y
x
F43y
F43
36.39 52.55
20.197.25
Fig. 14.6.2: Force diagrams for Problem 14.6.
F23x F34x =13,990F23y F34y =1,780
F34x (4.74) F34y (6.44) = 19,470(7)
Between links 2 and 3,
F32x = F23xF32y = F23
y (8)
For link 2, the equilibrium equations are
Fx = 0F32x + F12x = 0Fy = 0 F32y + F12y = 0 (9)
-
- 566 -
and summing moments about point O2 gives
MO2 = 0F32x (AO2sin0)+ F32y (AO2cos0 ) +T12 = 0= F32
y (3cos0 ) +T12 = 0 F32y (3) + T12 = 0
(10)
Now using Eqs. (8),
Fx = 0F23x + F12x = 0Fy = 0 F23y + F12y = 0MO2 = 0F23y (3) + T12
= 0
(11)
Equations (3), (7), and (11) can be written in matrix form for
solution. This gives,
1 0 1 0 0 0 0 0 00 1 0 1 0 0 0 0 00 0 4.763 3.648 0 0 0 0 00 0 1
0 1 0 0 0 00 0 0 1 0 1 0 0 00 0 4.74 6.44 0 0 0 0 00 0 0 0 1 0 1 0
00 0 0 0 0 1 0 1 00 0 0 0 0 3 0 0 1
F14x
F14y
F34x
F34y
F23x
F23y
F12x
F12y
T12
=
5,4442,00026,92013,9901,78019,470000
(12)
Equation (12) can be easily solved using MATLAB. The results
are
F14x = 3310 lbF14y = 2594 lb
F34x = F43x = 2134 lbF34y = F43y = 4594 lb
F23x = F32x =16,124lbF23y = F32y = 6374 lb
F12x =16,124 lbF12y = 6374 lb
T12 =19,121 in lb
-
- 567 -
Problem 14.7
Find the external torque (T12) that must be applied to link 2 of
the mechanism illustrated in orderto drive it at 2=210 rad/s CCW
and 2=0 rad/s2. Link 2 is balanced so that its center of mass isat
the pivot O2. The mechanism moves in the horizontal plane and
friction may be neglected.
W3= 3.4 lb IG3 = 0.1085 lb-s2-in
W4= 2.86 lb
O2
G2
A
BG3
G42
3
4
AO2 = 3.0 inBG = 6.0 inAB = 12.0 in
3
T12
45
2
Solution:
Velocity Analysis:
1vA2 = 1vA2 /O2 = 1vA3 = 12 rA2 /O2
1vB3 = 1vB4 = 1vA3 +1vB3/ A3 (1)Now,
1vA3 = 12 rA2/O2 = 210 3 = 630 in / s ( to rA2 /O2 )
1vB3 in horizontal direction
1vB3 /A3 =13 rB3 /A3 1vB3/A3 = 13rB3 /A3 ( to rB3 /A3)
Solve Eq. (1) graphically with a velocity polygon. From the
polygon,
1vB3 = 525 in / s
Also,
1vB3 /A3 = 452.7 in / sor
13 =1vB3/ A3rB3/A3
= 452.712
= 37.72 rad / s CW
Acceleration Analysis:
1aB3 =1aB4 = 1aA3 + 1aB3/ A3
1aB3 =1 aA2 /O2r +1 aA2 /O2
t +1 aB3 /A3r +1 aB3/A3
t (2)
-
- 568 -
Now,1aB3 in horizontal direction
O2
G2
A
BG3
G42
3
4
T12
45
2
300 in/s
Velocity Polygon
a2 a3,
b3, b4
1vB3
1vA31vB3/A 3
o'
50,000 in/sAcceleration Polygon
2
a2'a3',
1aA2/O2r
1aB3
1aB 3 /A 3r
1aB3/A3t
b3' g4',
o
Fig. 14.7.1: Position, velocity, and acceleration polygon for
Problem 14.7.
1aA2 /O2r =12 12 rA2 /O2( ) 1a A2 /O2r = 12
2 rA/O2 = 2102 3 =132,300 in / s 2
in the direction opposite to rA/O2
1aA2 /O2t =12 rA2/O2 1aA2/O2t = 12 rA/O2 = 0
1aB3 /A3r = 13 13 rB3 /A3( ) 1a B3/ A3r = 13
2 rB3 /A3 = 37.722 12 =17,070 in / s 2
in the direction opposite to rC3/A3
1aB3/A3t =13 rB3/ A3 1aB3 /A3t = 13 rB3/A3 ( to rB3 /A3)
Solve Eq. (2) graphically with a acceleration polygon. From the
polygon,
1aB3 = 1aG4 = 94,100 in / s 2
and1aB3 /A3t = 91,610 in / s 2
-
- 569 -
Determine the acceleration of G3 by image. Then,
1aG3 =104,740 in / s 2Also,
13 =1aB3/A3t
rB3/A3=91,61012
= 7634 rad / s2 CCW
Inertia Force Analysis:
We can now conduct the inertia force analysis. There will be an
inertia force associated witheach center of gravity. We will
represent these forces with a lower case f to distinguish
betweeninternal inertia forces and externally applied forces. The
forces are
f12 = m21aG2 = 0f13 = m3 1aG3 = 3.4386 (104,740) = 922.6 lb
(opposite
1aG3 )
f14 = m41aG4 = 2.86386 (70,028) = 518.9 lb (opposite1aG4 )
Only links 3 has an angular acceleration so only this link has
an inertia moment. The inertiamoment is given by
M13 = I313 = 0.1085(7634) = 828.3 in lb (opposite 13 or CW)
The inertia forces are shown in Fig. 14.7.2. The orientation
angles for the forces and links areshown in Fig. 14.7.2.
A freebody diagram for each of the links is shown in Fig.
14.7.2. From the free body diagrams,it is clear that no single free
body can be analyzed separately because in each case, fourunknowns
result. Therefore, we must write the equilibrium equations for each
freebody andsolve the equations as a set.
For the freebody diagram for link 4, assume initially that all
of the unknown forces are in thepositive x and y directions. Then a
negative result will indicate that the forces are in the
negativedirection. Note that F14x = 0 because there is no friction
between the slider and the frame.Summing forces in the X and Y
directions gives
Fx = 0F34x + f14 = 0 F34x = 518.9 lbFy = 0 F14y + F34y = 0
(3)
Between links 3 and 4,
F43x = F34xF43y = F34
y (4)
Now move to the free body diagram for link 3. Summing forces in
the X and Y directions gives:
-
- 570 -
M13
B 4 f14
F34x
F34y
14F
F12x
F12y F32
x
F32y
F23 f13x
F23y
x
F43y
F43
BG3
G4
4
O2
G2
A
2
3
T12
45
2 Force Scale500 lbs
M13
A
B
G33
O2
A
2T12
10.19
26.48
f13
f14
Fig. 14.7.2: Force diagrams for Problem 14.7.
Fx = 0F23x + F43x + f13cos26.48 = 0 = F23x + F43x +
922.6cos26.48 F23x + F43x = 825.8 lbFy = 0 F23y + F43y +
f13sin26.48 = 0 = F23y + F43y + 922.6sin26.48 F23y + F43y = 411.4
lb
(5)
and summing moments about point A gives
MA = 0M13 + F43x (ABsin10.19) + F43y (ABcos10.19)+
f13cos26.48(AG3sin10.19) + f13sin26.48(AG3cos10.19) = 0
= 828.3 + F43x (12sin10.19)+ F43y(12cos10.19)+
922.6cos26.48(6sin10.19)+ 922.6sin26.48(6cos10.19) = 0
F43x (2.123) + F43y (11.81) = 2477.6
(6)
Now using Eqs. (4),
F23x F34x = 825.8 lbF23y F34y = 411.4 lbF34x (2.123) F34y
(11.81) = 2477.6
(7)
Between links 2 and 3,
F32x = F23xF32y = F23
y (8)
-
- 571 -
For link 2, the equilibrium equations are
Fx = 0F32x + F12x = 0Fy = 0 F32y + F12y = 0 (9)
and summing moments about point O2 gives
MO2 = 0 F32x (AO2sin45) + F32y (AO2 cos45) +T12 = 0= F32x
(3sin45)+ F32y (3cos45) + T12 = 0F32x (2.121)+ F32y (2.121) +T12 =
0
(10)
Now using Eqs. (8),
Fx = 0F23x + F12x = 0Fy = 0 F23y + F12y = 0MO2 = 0F23x (2.121)
F23y (2.121)+ T12 = 0
(11)
Equations (3), (7), and (11) can be written in matrix form for
solution. This gives,
0 1 0 0 0 0 0 01 0 1 0 0 0 0 00 1 0 1 0 0 0 00 0 1 0 1 0 0 00
2.123 11.81 0 0 0 0 00 0 0 1 0 1 0 00 0 0 0 1 0 1 00 0 0 2.121
2.121 0 0 1
F14y
F34x
F34y
F23x
F23y
F12x
F12y
T12
=
518.90
825.8411.42477.6000
(12)
Equation (11) can be easily solved using MATLAB. The results
are
F14x = 0 lbF14y = 303.1 lb
F34x = F43x = 518.9 lbF34y = F43y = 303.1lb
F23x = F32x = 1344.7 lbF23y = F32y = 108.3 lb
F12x = 1344.7 lbF12y = 108.3 lb
T12 = 2622.3 in lb
-
- 572 -
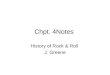
Problem 14.8
In the mechanism shown, the center of mass of link 3 is at G3,
which is located at the center oflink 3. The mass of link 3 is 0.5
kg. Its moment of inertia about G3 is 0.0012 N-s2-m. Theweights and
moments of inertia of members 2 and 4 may be neglected. Link 2 is
driven at aconstant angular velocity of 50 rad/s CW by the torque
applied to link 2. The mechanism movesin the horizontal plane, and
friction may be neglected.
1. Find the magnitudes and directions of the inertia force and
inertia torque acting on link 3.
2. Find the magnitudes and directions of the forces exerted on
link 3 by link 2 at A and by link 4at B . You may use either a
graphical solution or numerical solution of the dynamicequilibrium
equations.
= 50 rad/s2
oa
b
A
B
2
1
34
G 3 O A = 20 mm AB = 70 mm O B = 60 mmO O = 80 mmA B
A
B
OBOA
90
1000 mm/s
513 mm/s756 mm/s
o'
b'
a'
50 m/s 2
8.16 m/s 2
4.37 m/s 2
37.1 m/s 2
36.9 m/s 2
(Velocity Polygon)
(Acceleration Polygon)
T12
-
- 573 -
Solution:
The basic position, velocity, and acceleration analysis have
already been conducted. We needonly determine the acceleration of
G3 by image and the angular acceleration of link 3. To dothis, we
will redraw the acceleration diagram to scale as shown in Fig.
14.8.1. From thepolygon,
1aG3 = 39.8 m / s2= 39,800 mm / s2
1aB3 /A3t = 37.1 m / s2= 37,100 mm / s2
Also,
13 =1aB3/A3t
rB3/ A3=37,10070
= 530 rad / s2 CCW
o'
b'
a'
50 m/s2
8.16 m/s 2
4.37 m/s2
37.1 m/s 2
36.9 m/s 2
= 50 rad/s2
A
B
2
1
3 4
G3
OBOA
90
12.5 m/sAcceleration Polygon
2
g'3
1aB3/A3t
1aG3
39.8 m/s2
Fig. 14.8.1: Position, velocity, and acceleration polygon for
Problem 14.8.
-
- 574 -
Inertia Force Analysis:
We can now conduct the inertia force analysis. There will be an
inertia force associated with thecenter of gravity of link 3. We
will represent this force with a lower case f to distinguishbetween
internal inertia forces and externally applied forces. The force
is
f13 = m3 1aG3 = 0.5(37.1) =18.55 kg m / s2 =18.55N (opposite1aG3
)
Links 3 has an angular acceleration so this links has an inertia
moment. The inertia moment isgiven by
M13 = I313 = 0.0012(530) = 0.636 N m (opposite 13 or CW)
The inertia forces are shown in Fig. 14.8.2 along with a
freebody diagram of each link. From thefree body diagrams it is
clear that this problem can be solved graphically. To do this, we
mustreplace the inertia force and inertia moment by offsetting the
inertia force by a distance h. Thedistance h is give by
h = M13f13
= 0.63618.55
= 0.0343m = 34.3mm
The solution is shown in Fig. 14.8.2. We know the direction of
F14 and F34 because link 4 is atwo-force member. We then know the
direction of F43 because
F43 = F34
Using the procedure given in Section 11.5 of the text, we can
find the direction of F23 becausethe force F23 must pass through
point A and the intersection of f13 (after it is offset by h)
andF43 . Knowing the direction of F23 , we can sum forces
vectorially on link 3 and determine themagnitudes of F43 and F23 .
Then,
F = f13 + F23 + F43 = 0From the force polygon,
F23=22.2N
and
F43=7.54 N
The directions are given on the force polygon for link 3. Link 2
can now be analyzed for forcesif necessary; however, this is not
required for this problem.
-
- 575 -
A
B
21
34
G3
OBOA90
M13
f 13
Force Scale
10 N
A
2
OA
14
B
4
OB F
F34A
B
3
G 3
90
M 13
f 13
F43
F23
F32
F12T 13
h
f 13
F43
F23
Force polygon for link 3
Fig. 14.8.2: Force diagrmas for Problem 14.8.
Problem 14.9
Link AB of the geared five-bar linkage shown drives CCW against
a load torque T15 = 25 in-lb. If12 = 0.001 rpm CW, find the driving
torque T12. The mechanism moves in the horizontal plane,and
friction may be neglected. The gears 2 and 3 are represented by
their pitch circles. Bothgears turn on bearings supported by the
tie link, 4. The weight of link 2 is small and can beneglected.
Gear 3 is 0.2 in thick and may be treated as a solid disk.
-
- 576 -
2
34
5
TT 12
15
r
r
A
B
C D3
E
2
2
AB = 1.0 inBC = 2.0 inCD = 1.0 in
AE = 2.0 inDE = 2.0 in
r = 0.5 inr = 1.5 in23
= 1352= 90
ABC
W = 0.235 lb3
Solution
This problem can be solved as a dynamics problem by performing a
velocity, acceleration, andinertia force analysis; however, because
of the slow speed of link 2, the accelerations will beextremely
small. Therefore, the inertia forces throughout the system will be
negligible comparedto the applied forces. As a result, this problem
can be treated as a statics problem. Because themechanism operates
in the horizontal plane, only the applied torque, T15 needs to be
considered.
The problem then can be solved most easily using conservation of
power and instant centers.From conservation of power,
T12 12 +T15 15 = 0 (1)
To use instant centers, we must draw the mechanism to scale.
From Eq. (1), power is involved inlinks 2 and 5. Therefore, we I12,
I15, and I25. Using the procedure discussed in Chapter 2,
theinstant centers are located as shown in Fig. 14.9.1. Because I25
lies outside of both I12 and I15,both 12 and 15 will be in the same
direction. Therefore, for Eq. (1) to be satisfied, the torquesT12
and T15 must be in opposite directions. As a result, T12 will be
CW, and we need onlydetermine the magnitude of T12 . From Eq.
(1),
T12 = T151512
.
From the relationships for instant centers,
vI25 = 15(rI25 /I15) = 12(rI25 /I12)and
1512
=rI25/I12rI25/ I15
Therefore,
T12 = T151512
= T15rI25/I12rI25/ I15
.
From Fig. 14.9.1,
rI25/ I15 = 4.819 inand
-
- 577 -
rI25/ I12 = 2.833 in
Therefore,
T12 = T15rI25/I12rI25/I15
= 25 2.8334.819
=14.70 in lband
T12 =14.70 in lb CW
A E
B
CD
2
3
4
5
I12 I15
I35
I34
I24I23
12
3
4
5
I25
Fig. 14.9.1: Instant center locations for Problem 14.9.
Problem 14.10
A punch press similar to that of Example 14.5 is to punch holes
of diameter up to 0.75 in throughsteel plate up to 0.375 in thick.
The shear strength of the steel will range up to 60,000 psi.
Therated speed of the motor is 1500 rpm, and a 10 % drop in motor
speed is allowable. If holes areto be punched at a maximum rate of
1 per second, find the requisite motor power and
flywheelinertia.
Solution
The maximum punch force is
F = d t
-
- 578 -
where = 60,000 psi is the shear strength of the material, d is
the diameter of the hole, and t isthe plate thickness. That is, the
maximum punch force is simply the shear area multiplied by theshear
strength. Then,
F = d t = (0.75)(0.375)(60,000) = 53,014 lb
The area under the curve of punch force versus depth of
penetration is the energy used in thepunching operation. It can be
measured experimentally, but as discussed in the text,
E = Ft2
(14.16)
is a frequently used approximation. Therefore,
E = Ft2=53,014(0.375)
2= 9,940 in lb= 828.3 ft lb
At a punching rate of once every second the average power
required is
P =828.3 ft lb / (1)s =828.3 ft lb / s =1.506 hp
This is the power for which the motor should be sized.
Now, if the rated motor speed is 1500 rpm, we can assume that
the maximum motor speed willbe this value so
2 = 1,500 260 = 157 rad/s
Also, we can assume that the motor speed quickly drops to its
minimum value during the punchstroke and that it is then built back
up approximately uniformly to the maximum value in theremainder of
the cycle time. Therefore
= 1 +22
is an adequate approximation to the average motor speed, .
Since the allowable motor speed variation is 10%, c = 0.10 and
so, applying Eq. (14.13),
0.10 =2 1 =22 1( )2 +1
or2 +1 = 20 2 1( )
and1 = (19 / 21)2
Substitution of 2 = 157 gives
1 = (19 / 21)2 = (19 / 21)157 = 142 rad/s
-
- 579 -
Also, applying Eq. (14.14),
E = Iw222 1
2( )or
Iw = 2E22 12( )=
2(828.3)1572 1422( ) = 0.369 ft-lb s
2
Problem 14.11
A uniform rectangular plate is suspended from a rail by means of
two bogies as shown. Theplate is connected to the bogies by means
of frictionless hinge joints at A and at B. At time t=0the pin of
joint B breaks, allowing the plate to swing downward. Write the
equations of motionof the plate as it starts to move. Hence find
its initial angular acceleration and the initialacceleration of
point A.
You may assume that the rollers which support point A are
frictionless and that they remain incontact with the rail. You may
also assume that the angular displacement from the initialposition
is small. The moment of inertia of a uniform rectangular plate with
sides 2a and 2babout an axis normal to its plane passing through
its centroid is m[(2a)2+(2b) 2]/12, where m isthe mass of the
plate.
A BG
a a
b
b
Solution
First draw a free-body diagram (FBD) of the bogie. If it is
assumed to be weightless, the freebody diagram is as follows:
From this FBD, it is apparent that the forces must all be
vertical. Now draw a FBD for the place.
A B
W
FA
G
-
- 580 -
Summing forces in the y direction,
Fy = FA W =maGySumming forces in the x direction,
Fx = 0 =maGx aGx = 0Summing moments about the center of mass of
the plate,
MG = FAa = I = 112 m (2a)2 + (2b)2[ ] =13m a2 + b2[ ]
Because the angular velocity is zero, the acceleration
relationship is as shown in the following:
AB
G
aA
aG/A
ab r aG/A
aA
aG
In equation form,
aG = aA +aG /A
and
aGx = 0 = aA + aG/ Abr= aA + r br aA = b
aGy = aG /Aar= r a
r= a
Combining terms,
FA =W +maGy =W +ma =mg +ma =m(g a )
where g is the acceleration of gravity. From the moment
equation
FA =13am a2 +b2[ ]
Then,
13am a2 + b2[ ] = m(g a )
or
-
- 581 -
13a
a2 + b2[ ] + a = 13a a2 + b2[ ]+ a{ } = g
Then
= g13a
a2 + b2[ ] +a{ }=
3aga2 + b2[ ]+ 3a2{ }
=3ag
4a2 + b2{ }
in the CW direction. Also,
aA = b = 3abg4a2 + b2{ }
From the figure,
aA =3abg4a2 + b2{ }
to the right. Also,
FA =13am a2 +b2[ ] = 13am a
2 + b2[ ] 3ag4a2 +b2{ }
=gm a2 + b2[ ]4a2 + b2{ }